
Detection of Electronic Devices Using FMCW Nonlinear Radar


Abstract
:1. Introduction
2. Nonlinear Radar Equation, Nonlinear RCS, and Nonlinear FMCW Radar
2.1. Nonlinear Radar Equation
2.2. Estimation of Maximum Detectable Range for FMCW Radar
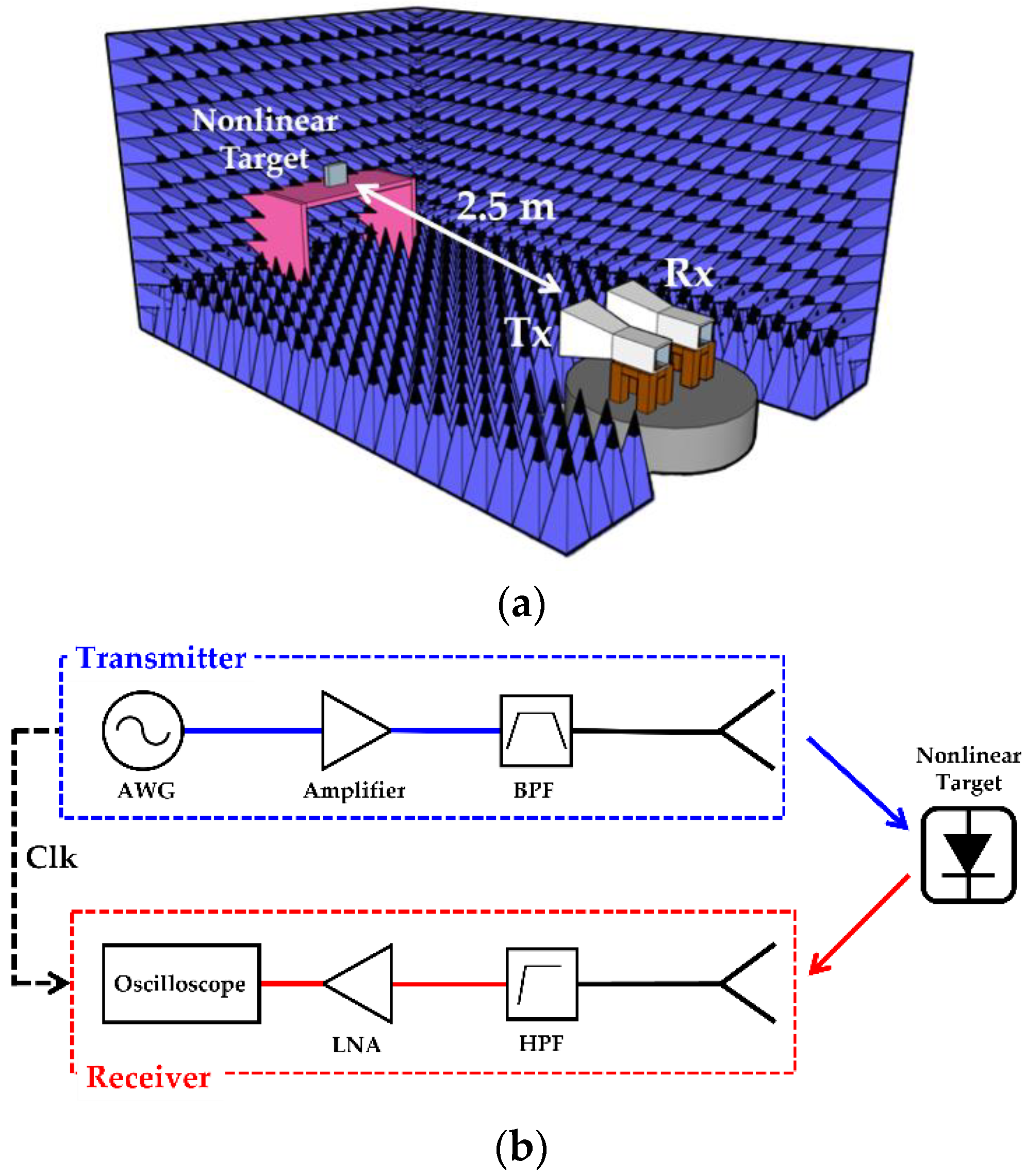
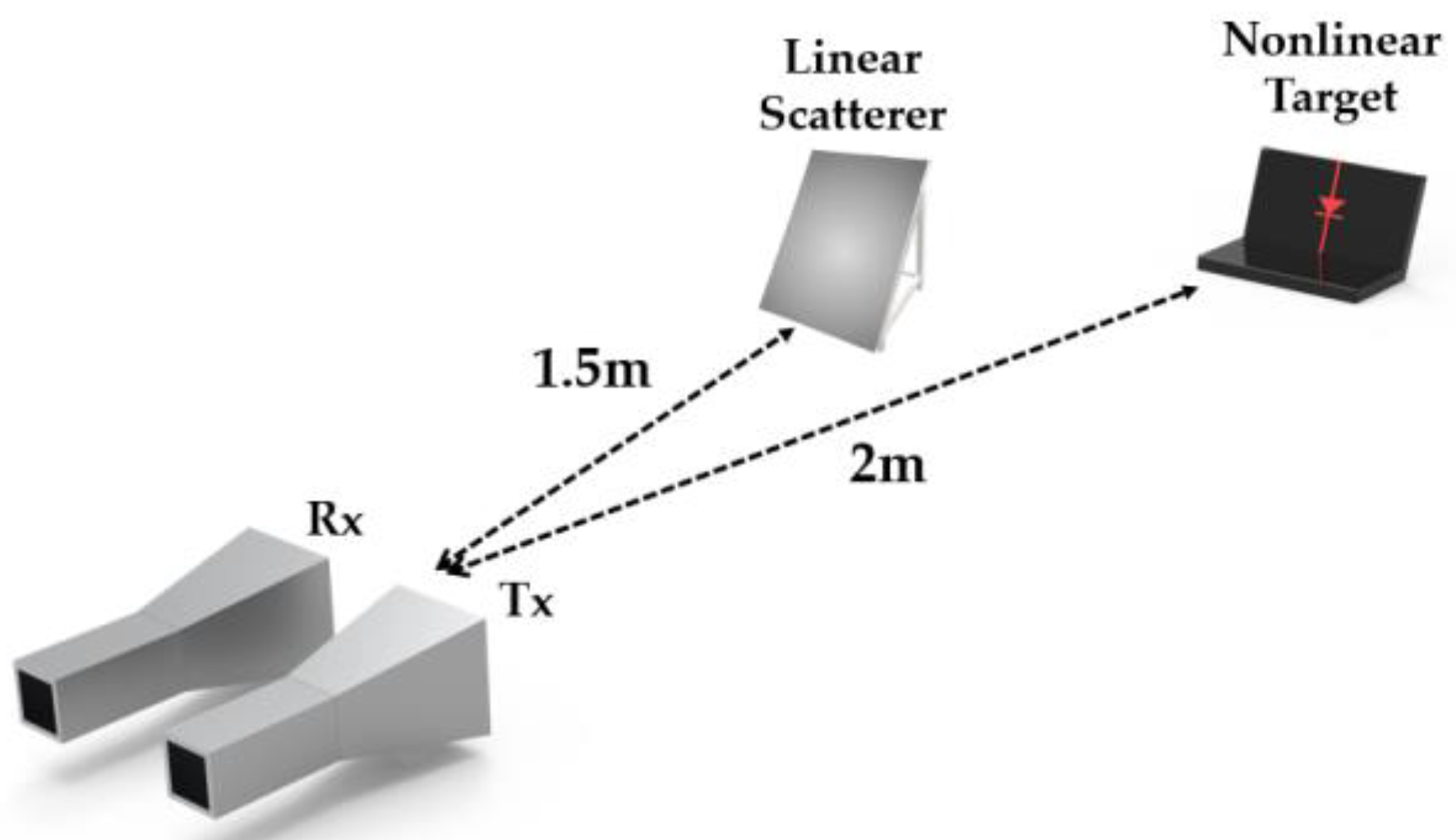
3. FMCW Nonlinear Radar Measurement Setup
4. Results and Discussion
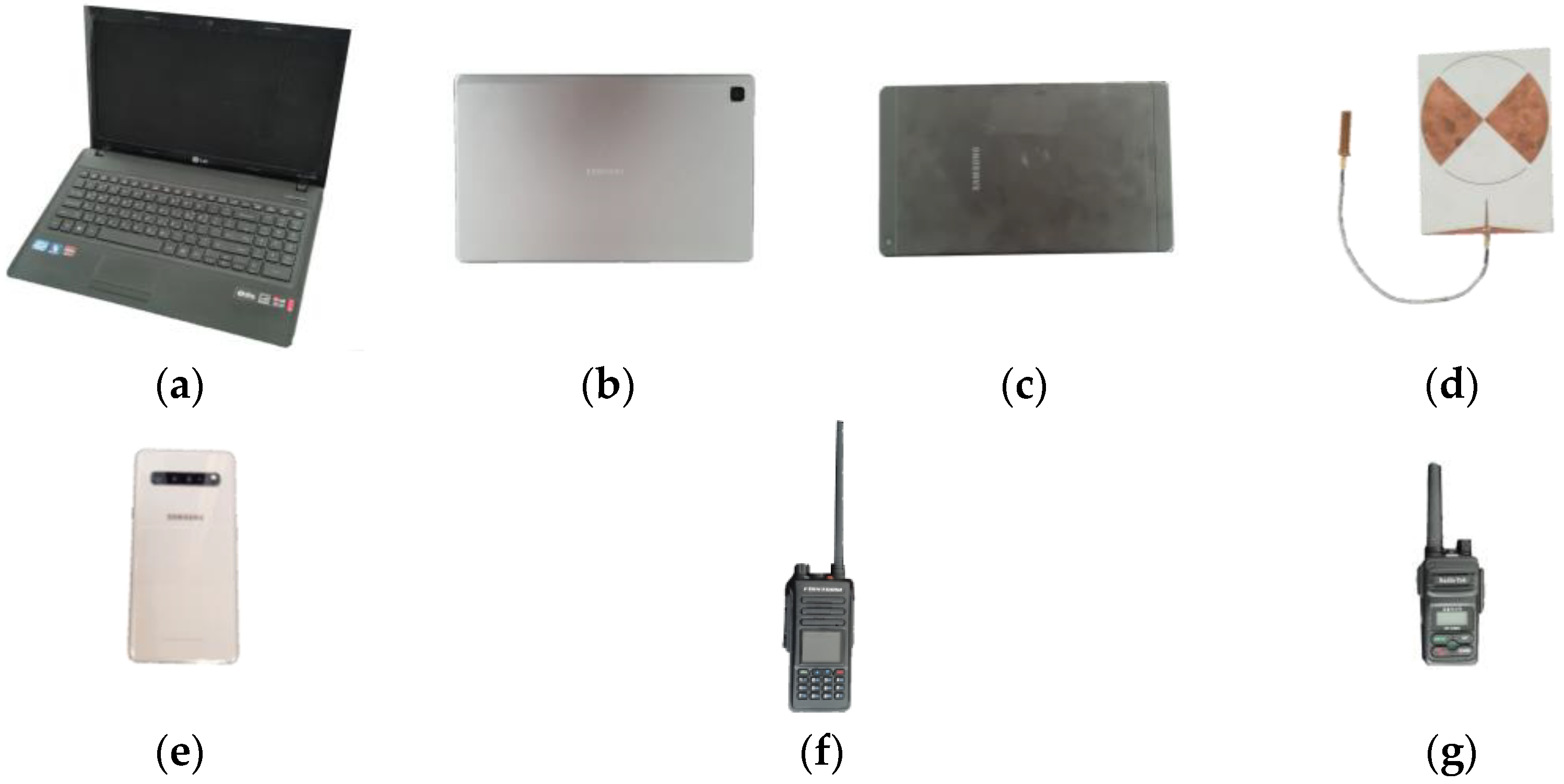
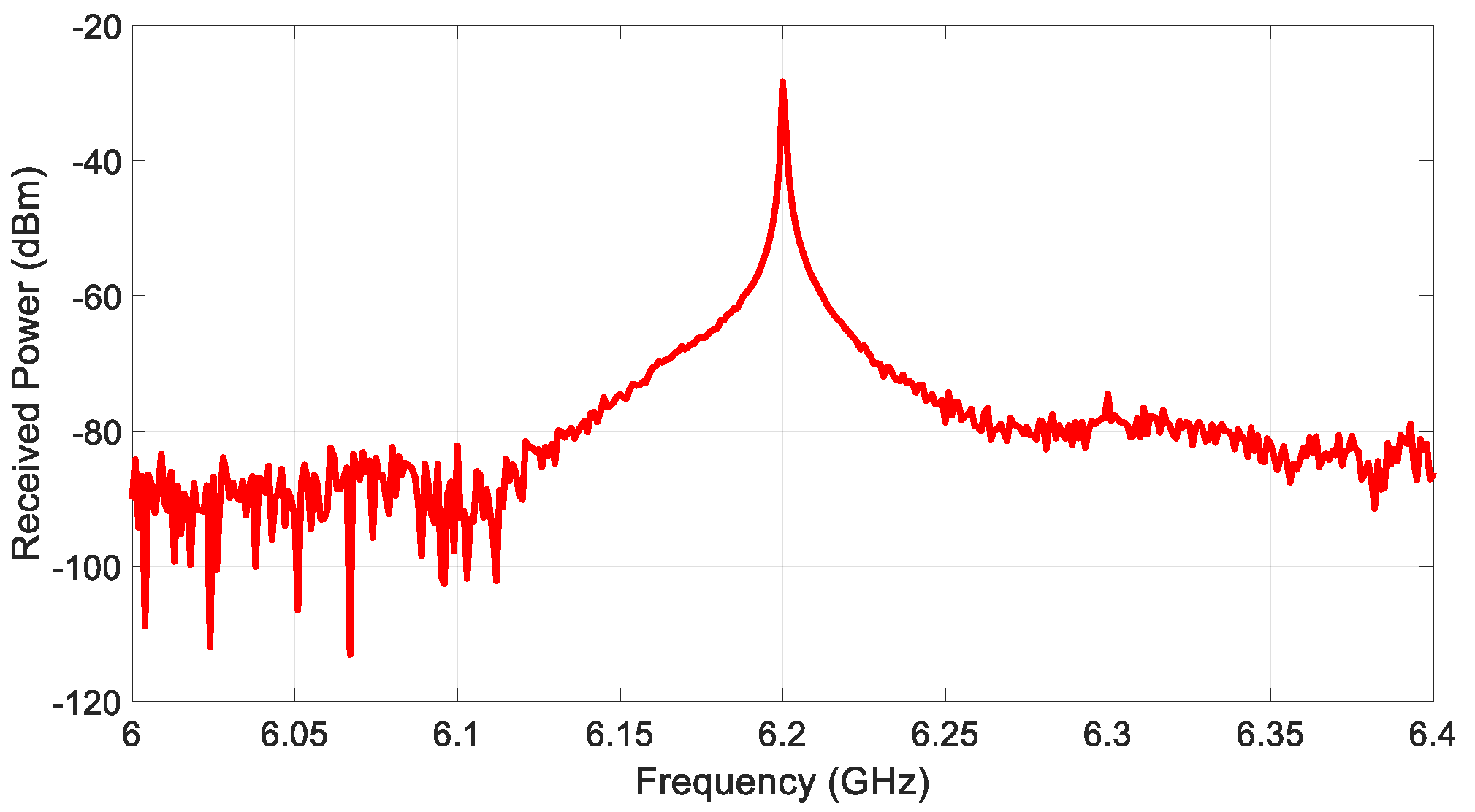
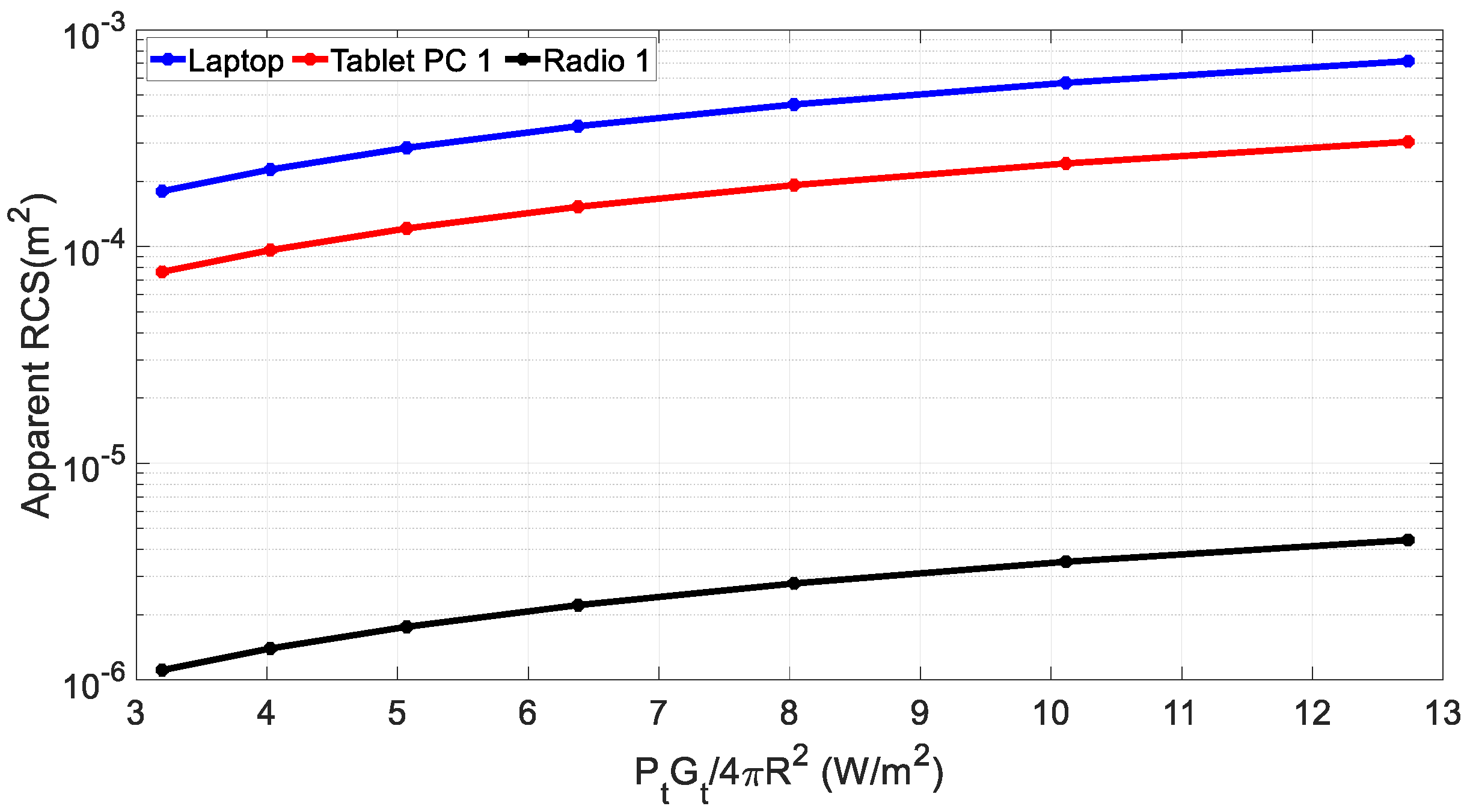
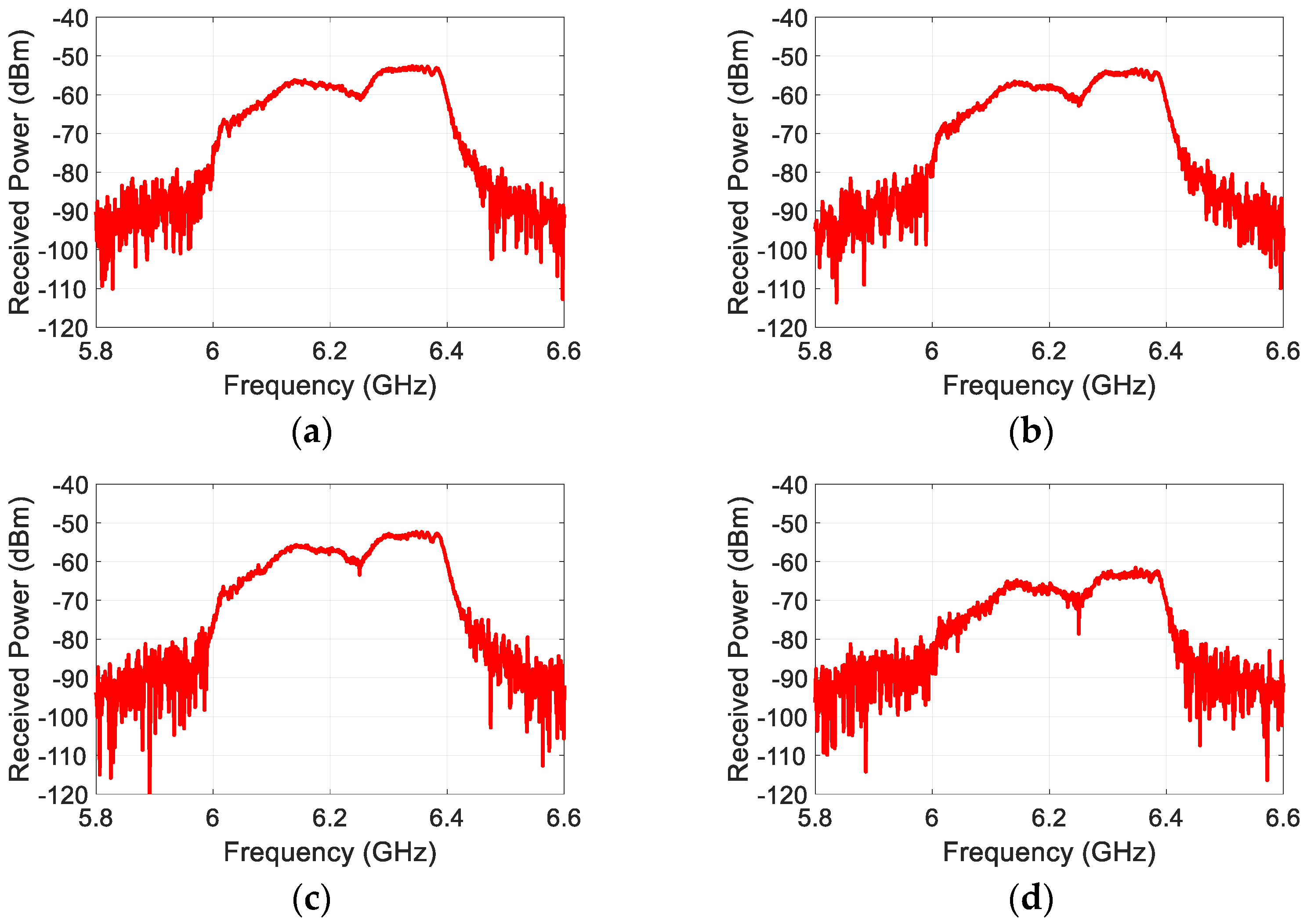
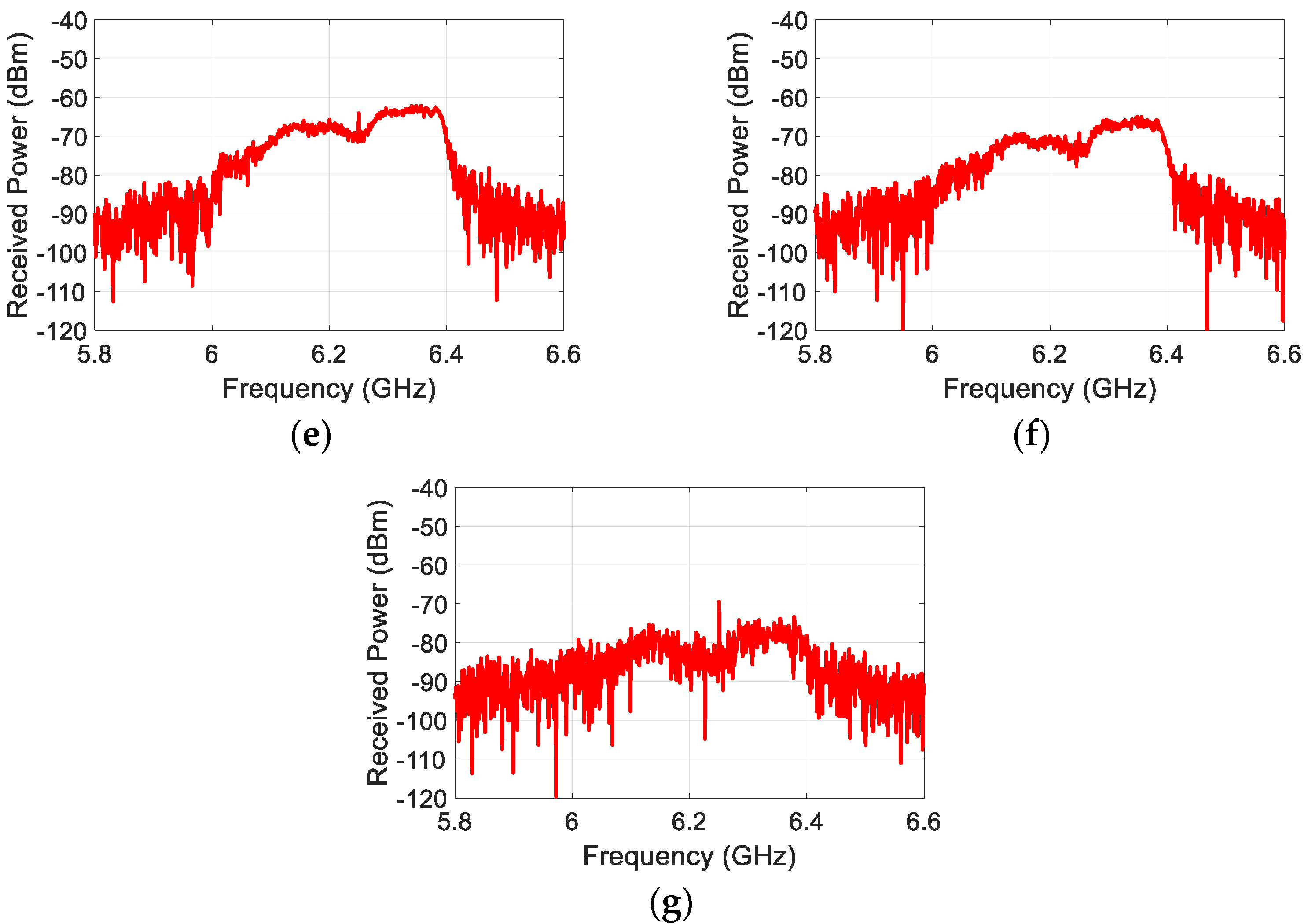
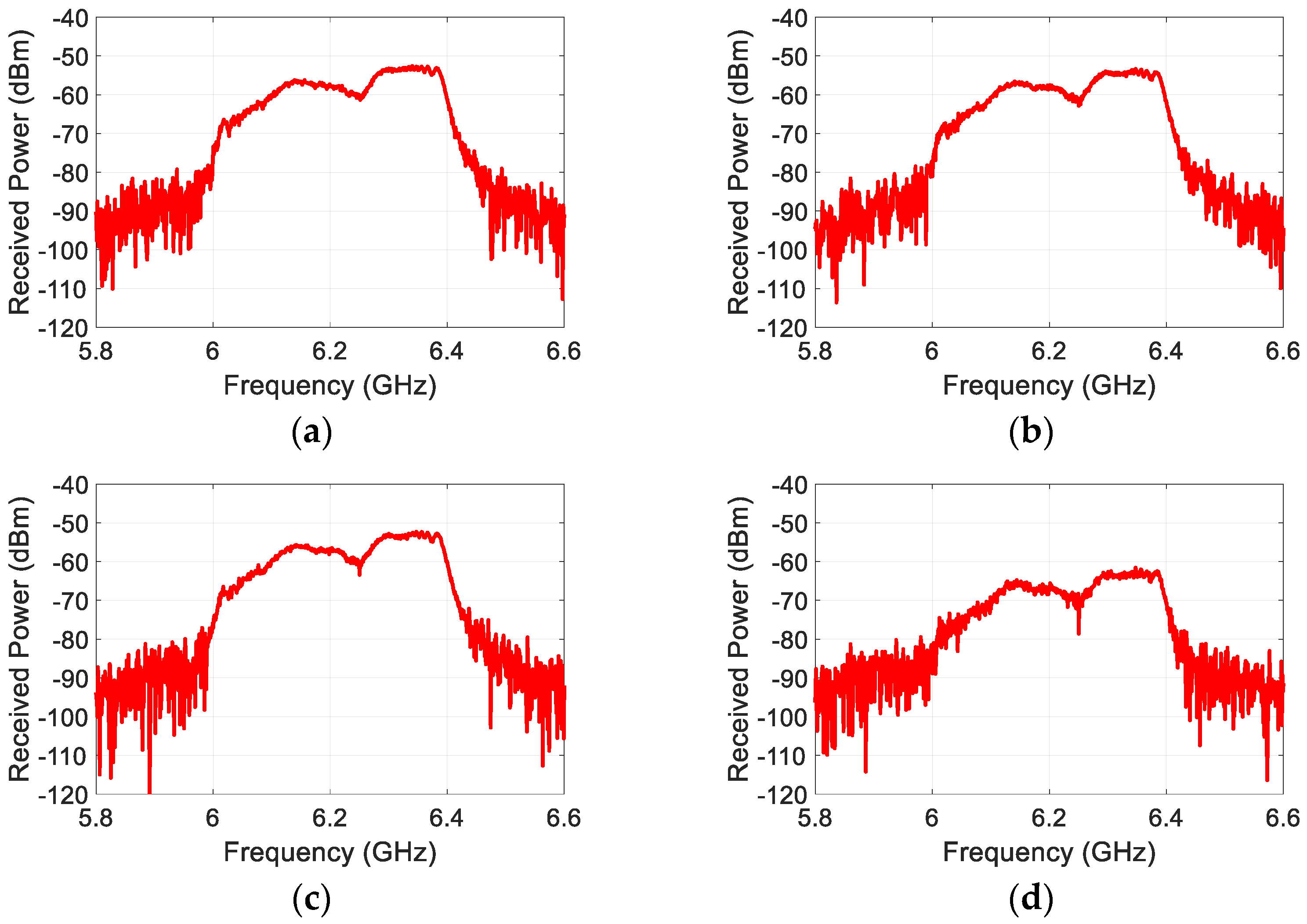
4.1. Measured Second Harmonic Responses from Targets
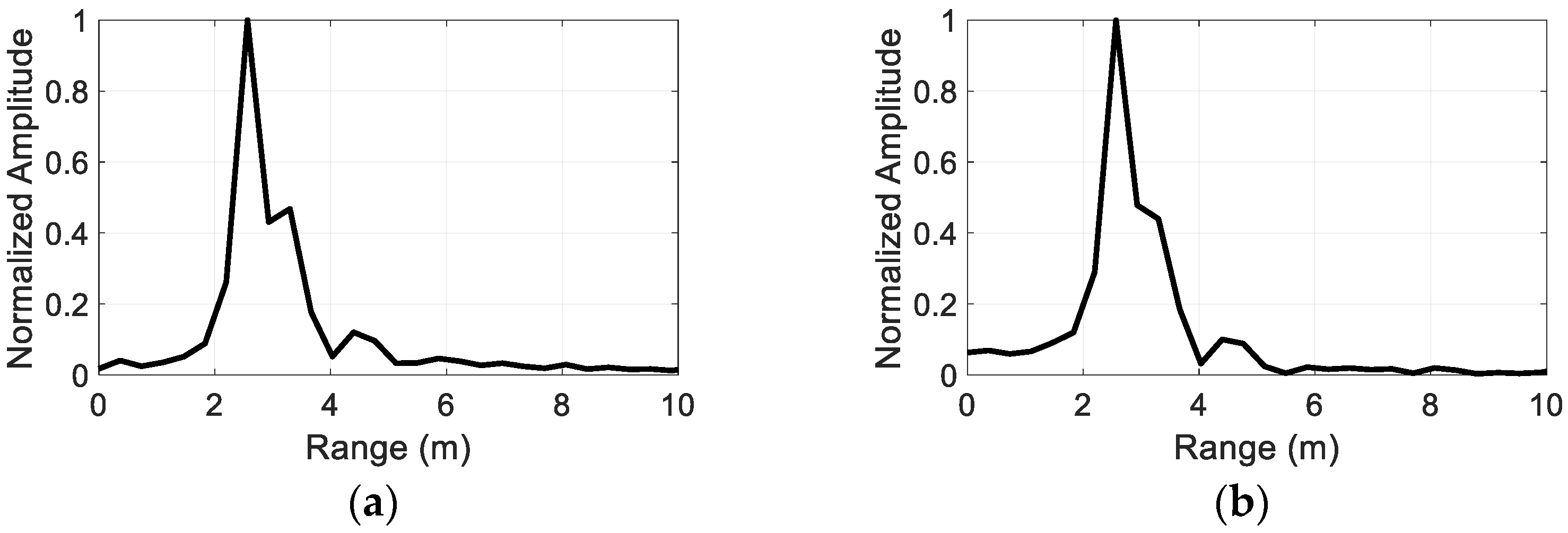
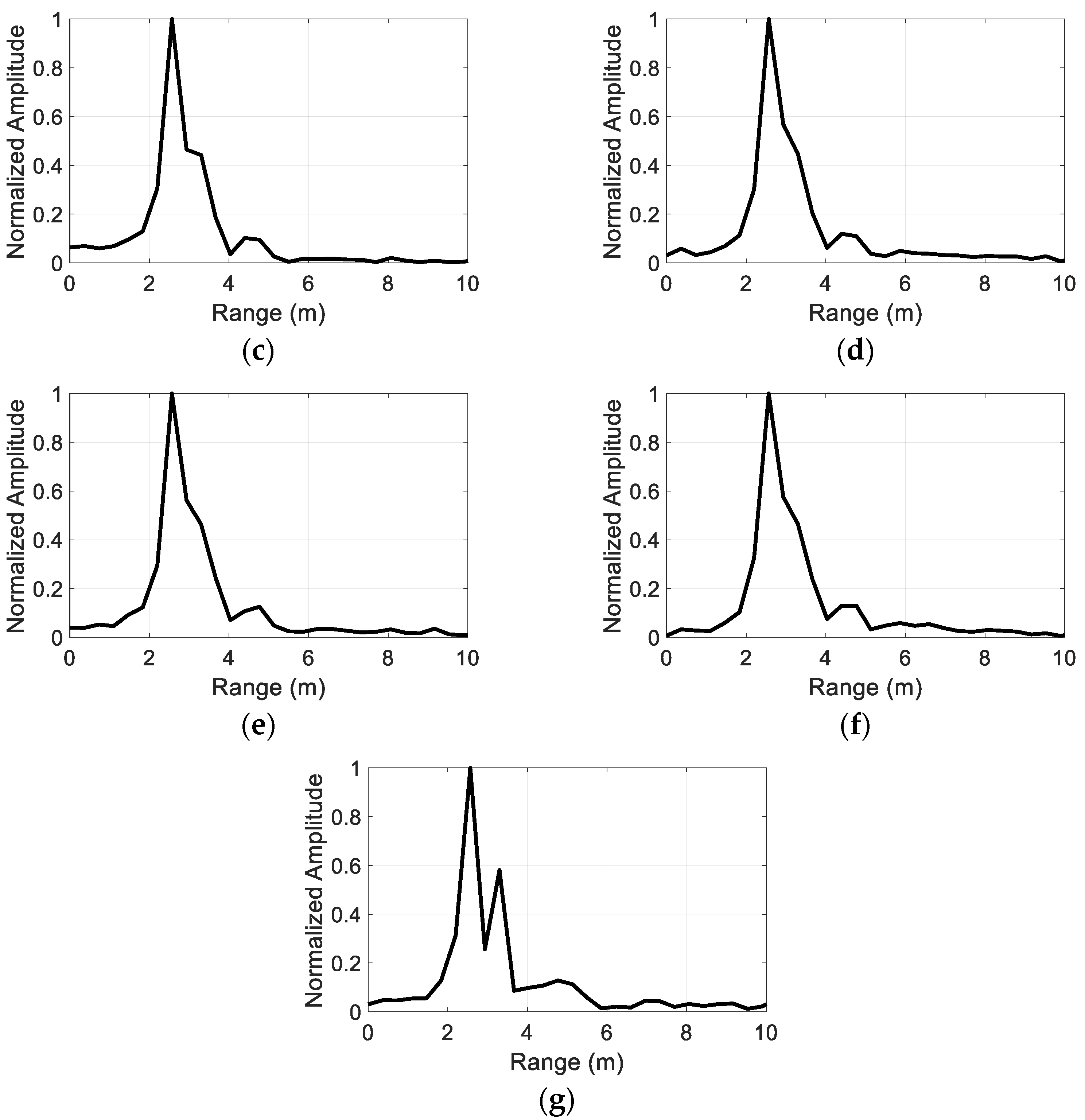
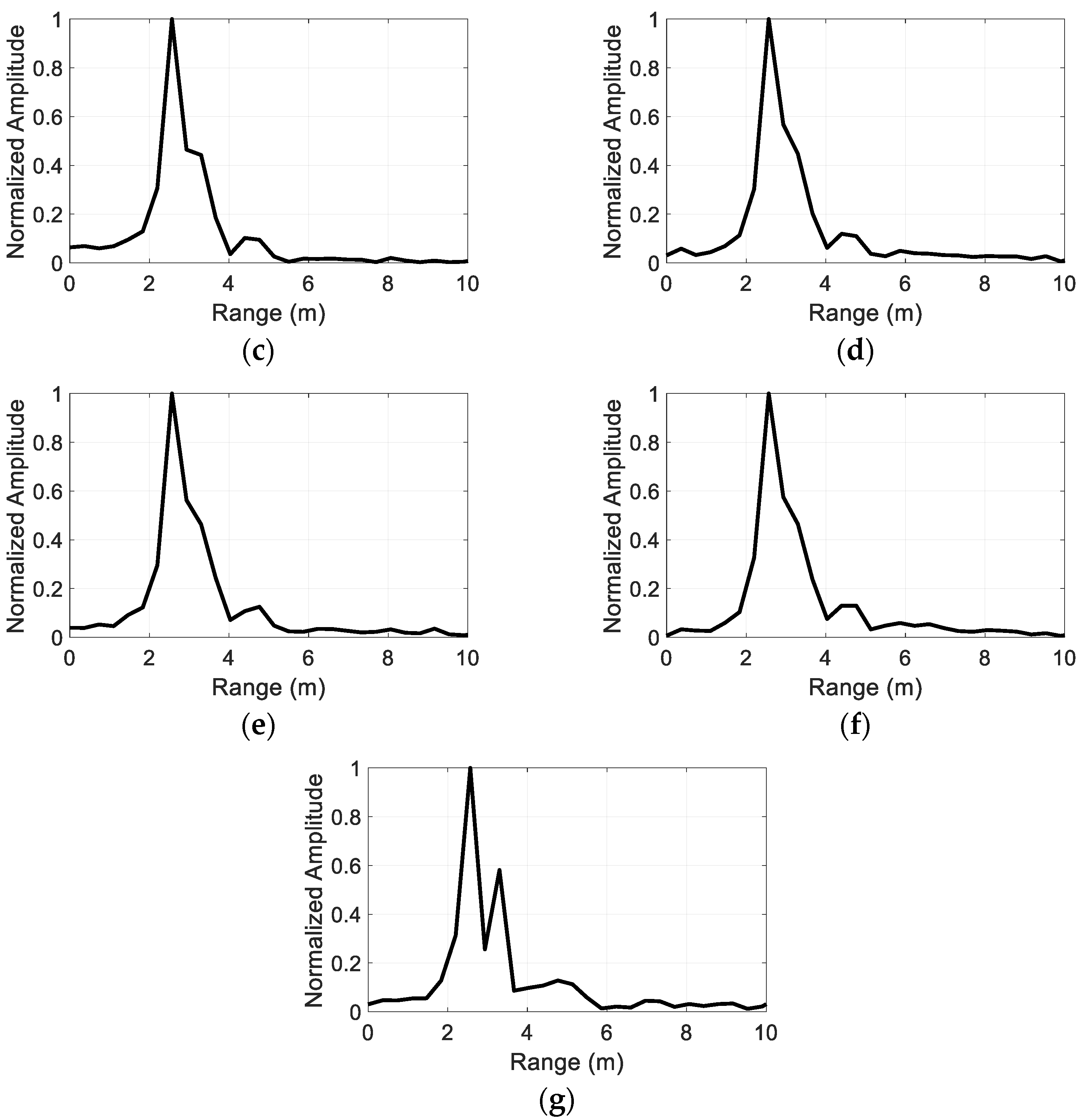
4.2. Extraction of Range Information
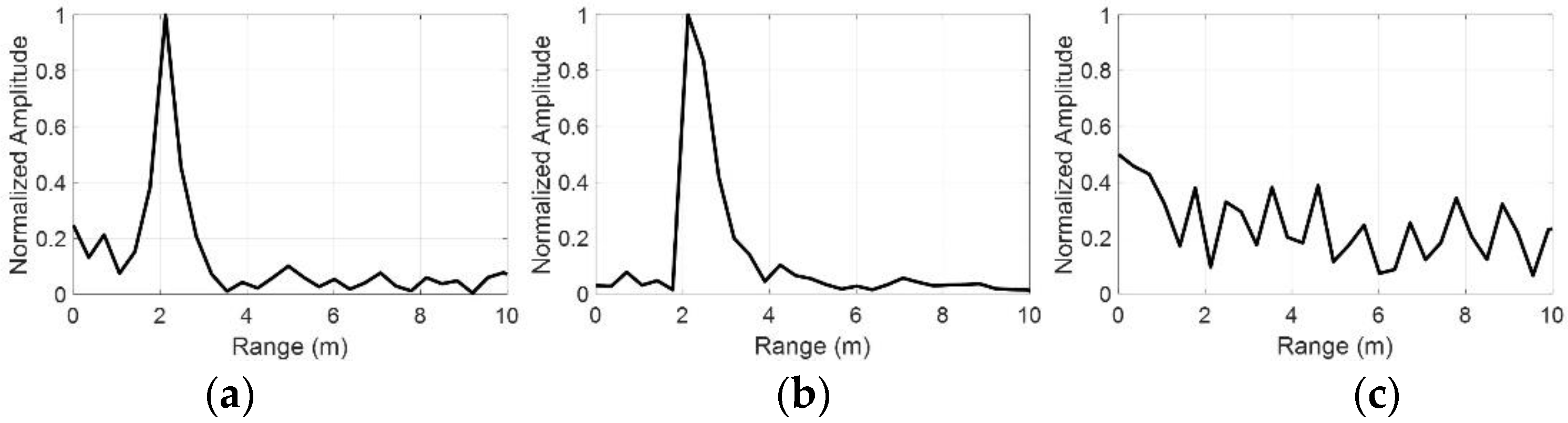
4.3. Nonlinear Detection in the Presence of Linear Scatterer
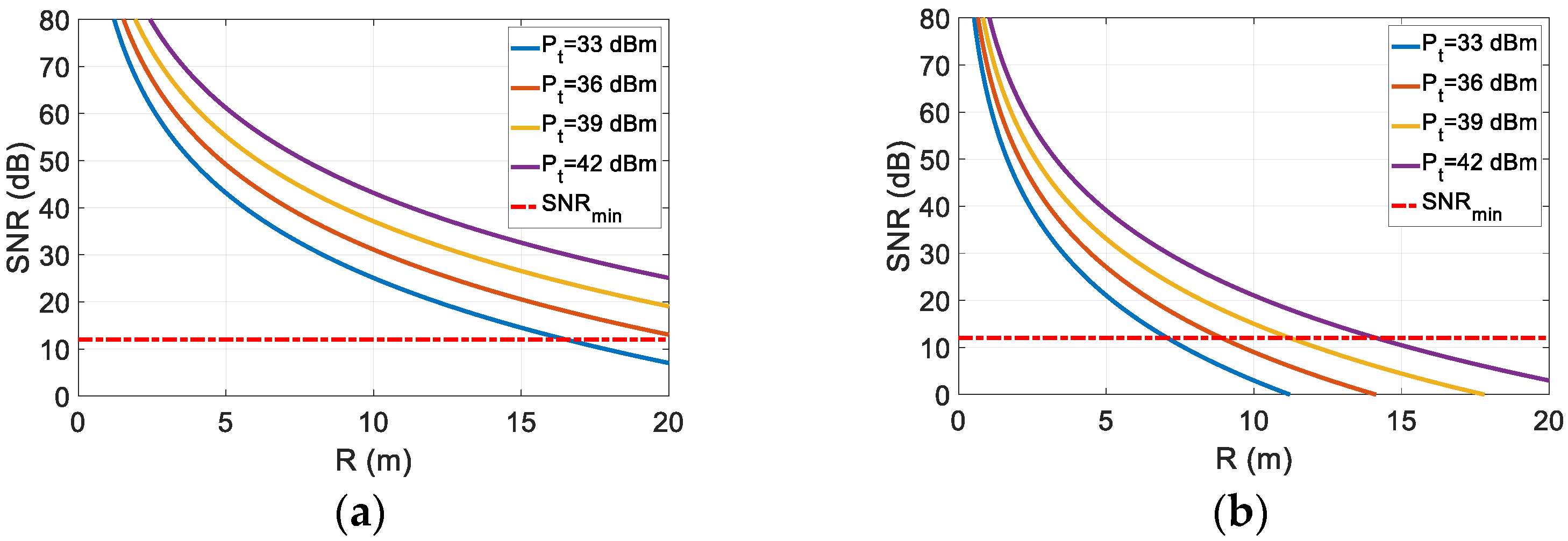
4.4. Estimation of Maximum Detectable Range
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Skolnik, M. Role of Radar in Microwaves. IEEE Trans. Microw. Theory Tech. 2002, 50, 625–632. [Google Scholar] [CrossRef]
- Skolnik, M. Radar in the Twentieth Century. IEEE Aerosp. Electron. Syst. 2000, 15, 27–46. [Google Scholar]
- Harger, R.O. Harmonic radar systems for near-ground in- foliage nonlinear scatterers. IEEE Trans. Aerosp. Electron. Syst. 1976, 12, 230–245. [Google Scholar]
- Mazzaro, G.J. Nonlinear Junction Detection vs. Electronics: System Design and Design and Improved Linearity. In Proceedings of the 2020 IEEE International Radar Conference (RADAR), Washington, DC, USA, 28–30 April 2020. [Google Scholar]
- Flemming, M.A.; Mullins, F.H.; Watson, A.W.D. Harmonic Radar Detection Systems. In Proceedings of the IEEE International Conference on Radar (Radar-77), London, UK, 25–28 October 1977; pp. 552–554. [Google Scholar]
- Bahr, A.; Frank, V.; Sweeney, L. Radar Scattering from Intermittently Contacting Metal Targets. IEEE Trans. Antennas Propag. 1977, 25, 512–518. [Google Scholar] [CrossRef]
- Mazzaro, G.J.; Martone, A.F.; Ranney, K.I.; Narayanan, R.M. Nonlinear Radar for Finding RF Electronics: System Design and Recent Advancements. IEEE Trans. Micro. Theory. Tech. 2017, 65, 1716–1726. [Google Scholar] [CrossRef]
- Faia, J.M.; He, Y.; Park, H.S.; Wheeler, E.D.; Hong, S.K. Detection and Location of Nonlinear Scatterers Using DORT Applied with Pulse Inversion. Prog. Electromagn. Res. Lett. 2018, 80, 101–108. [Google Scholar] [CrossRef]
- Hong, S.K.; Park, H.S. Embedded Resonances for Discrimination of Multiple Passive Nonlinear Targets Applicable to DORT. Prog. Electromagn. Res. 2019, 81, 31–42. [Google Scholar] [CrossRef]
- Opitz, C.L. Metal-detecting radar rejects clutter naturally. Microwaves 1976, 15, 12–14. [Google Scholar]
- Steele, D.W.; Rotondo, F.S.; Houck, J.L. Radar System for Manmade Device Detection and Discrimination from Clutter. U.S. Patent 7,830,299, 9 November 2010. [Google Scholar]
- Mazzaro, G.J.; Ranney, K.I.; Gallagher, K.A.; McGowan, S.; Martone, A.F. Simultaneous-Frequency Nonlinear Radar: Hardware Simulation; Technical Report; Army Research Lab Sensors and Electron Devices Directorate: Adelphi, MD, USA, 2015. [Google Scholar]
- Phelan, B.R.; Sherbondy, K.D.; Ranney, K.I.; Narayanan, R.M. Design and Performance of an Ultra-Wideband stepped-Frequency Radar with Precise Frequency Control for Landmine and IED Detection. Proc. SPIE. 2014, 9077, 53–64. [Google Scholar]
- Li, Z.; Yang, Z.; Song, C.; Li, C.; Peng, Z.; Xu, W. E-Eye: Hidden Electronics Recognition Through Mmwave Nonlinear Effects. 2018. In Proceedings of the 16th ACM Conference on Embedded Networked Sensor Systems, Shenzhen, China, 4–7 November 2018. [Google Scholar]
- Chioukh, L.; Boutayeb, H.; Deslandes, D.; Wu, K. Noise and Sensitivity of Harmonic Radar Architecture for Remote Sensing and Detection of Vital Signs. IEEE Trans. Micro. Theory Tech. 2014, 63, 1847–1855. [Google Scholar] [CrossRef]
- Chioukh, L.; Boutayeb, H.; Deslandes, D.; Wu, K. Dual-band linear antenna array for harmonic sensing applications. IEEE Ant. Wirel. Propag. Lett. 2016, 15, 1577–1580. [Google Scholar] [CrossRef]
- Mishra, A. Intermoudation-Based Nonlinear Smart Health Sensing of Human Vital Signs and Location. IEEE Access 2019, 7, 158284–158295. [Google Scholar] [CrossRef]
- Psychoudakis, D.; Moulder, W.; Chen, C.; Zhu, H.; Volakis, J.L. A Portable Low-Power Harmonic Radar System and Conformal Tag for Insect Tracking. IEEE Ant. Wirel. Propag. Lett. 2008, 7, 444–447. [Google Scholar] [CrossRef]
- Milanesio, D.; Saccani, M.; Maggiora, R.; Laurino, D.; Porporato, M. Design of an Harmonic Radar for the Tracking of the Asian Yellow-Legged Hornet. Ecol. Evol. 2016, 6, 2170–2178. [Google Scholar] [CrossRef] [PubMed]
- Maggiora, R.; Saccani, M.; Milanesio, D.; Porporato, M. An Innovative Harmonic Radar to Track Flying Insects: The Case of Vespa Velutina. Sci Rep. 2019, 9, 11964. [Google Scholar] [CrossRef] [PubMed]
- Tsai, Z.M.; Jau, P.H.; Kuo, N.C.; Kao, J.C.; Lin, K.Y.; Chang, F.R.; Yang, E.C.; Wang, H. A High-Range-Accuracy and High-Sensitivity Harmonic Radar Using Pulse Pseudorandom Code for Bee Searching. IEEE Trans. Microw. Theory Tech. 2013, 61, 666–675. [Google Scholar] [CrossRef]
- Jankiraman, M. Design of Multifrequency CW Radars; SciTech Publishing Inc.: Raleigh, NC, USA, 2007. [Google Scholar]
- Mazzaro, G.J.; Gallagher, K.A.; Martone, A.F.; Sherbondy, K.; Narayanan, R.M. Short-Range Harmonic Radar: Chirp Waveform, Electronic Targets. Proc. SPIE. 2015, 9461, 946108. [Google Scholar]
- Ranney, K.I.; Gallagher, K.A.; Sherbondy, K.; Martone, A.F.; Mazzaro, G.J.; Narayanan, R.M. Instantaneous, Stepped-Frequency, Nonlinear Radar. Proc. SPIE. 2015, 9461, 946122. [Google Scholar]
- Stove, A.G. Linear FMCW Radar Technique. IEE Proc. F (Radar Signal Process.) 1992, 139, 343–350. [Google Scholar] [CrossRef]
- Richards, M.A. Fundamentals of Radar Signal Processing, 2nd ed.; McGraw-Hill Education: New York, NY, USA, 2005. [Google Scholar]
- Jankiraman, M. FMCW Radar Design, kindle ed.; Artech House: Washington, DC, USA, 2018. [Google Scholar]
- Hyun, E.; Lee, J.H. Method to Improve Range and Velocity Error Using De-interleaving and Frequency Interpolation for Automotive FMCW Radars. Int. J. Signal Process. Image Process. Pattern Recognit. 2009, 2, 11–21. [Google Scholar]
- Gallagher, K.A. Harmonic Radar: Theory and Applications to Nonlinear Target Detection, Tracking, Imaging and Classification. Ph.D. Dissertation, The Pennsylvania State University, State College, PA, USA, 2015. [Google Scholar]
- Oh, S.Y.; Cha, K.H.; Hong, H.Y.; Park, H.S.; Hong, S.K. Measurement of Nonlinear RCS of Electronic Targets for Nonlinear Detection. J. Korean Inst. Electromagn. Eng. Sci. 2022, 22, 447–451. [Google Scholar] [CrossRef]
- Gallagher, K.A.; Mazzaro, G.J.; Martone, A.F.; Sherbondy, K.; Narayanan, R.M. Derivation and Validation of the Nonlinear Radar Range Equation. Proc. SPIE 2016, 9829, 98290P. [Google Scholar]
- Dardari, D. Detection and Accurate Localization of Harmonic Chipless Tags. EURASIP J. Adv. Signal Process. 2015, 2015, 77. [Google Scholar] [CrossRef]
- Kwak, Y.K. Radar System Engineering; Kyomoon: Paju, South Korea, 2020. [Google Scholar]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Nonlinear Target (Size, ) | Received Power [dBm] | Nonlinear RCS [ ] |
|---|---|---|
| Radio 1 (5 × 9) | −54.15 | 3.4 × 10−7 |
| Radio 2 (5.5 × 12) | −47.78 | 1.5 × 10−6 |
| Diode-terminated Antenna (9 × 13) | −46.31 | 2.11 × 10−6 |
| Cell Phone (6.7 × 18.8) | −42.99 | 4.53 × 10−6 |
| Tablet PC 1 (12.4 × 21) | −35.76 | 2.39 × 10−5 |
| Tablet PC 2 (15.7 × 24.7) | −32.61 | 4.94 × 10−5 |
| Laptop (35 × 22) | −32.04 | 5.63 × 10−5 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Cha, K.; Oh, S.; Hong, H.; Park, H.; Hong, S.K. Detection of Electronic Devices Using FMCW Nonlinear Radar. Sensors 2022, 22, 6086. https://doi.org/10.3390/s22166086
Cha K, Oh S, Hong H, Park H, Hong SK. Detection of Electronic Devices Using FMCW Nonlinear Radar. Sensors. 2022; 22(16):6086. https://doi.org/10.3390/s22166086
Chicago/Turabian StyleCha, Kyuho, Sooyoung Oh, Hayoung Hong, Hongsoo Park, and Sun K. Hong. 2022. "Detection of Electronic Devices Using FMCW Nonlinear Radar" Sensors 22, no. 16: 6086. https://doi.org/10.3390/s22166086
APA StyleCha, K., Oh, S., Hong, H., Park, H., & Hong, S. K. (2022). Detection of Electronic Devices Using FMCW Nonlinear Radar. Sensors, 22(16), 6086. https://doi.org/10.3390/s22166086