
A Semi-Supervised Methodology for Fishing Activity Detection Using the Geometry behind the Trajectory of Multiple Vessels



Abstract
:1. Introduction
2. Materials and Methods
2.1. Dataset
2.2. Unsupervised Step
2.3. Supervised Step
3. Results
3.1. Analysis of the Unsupervised Approach
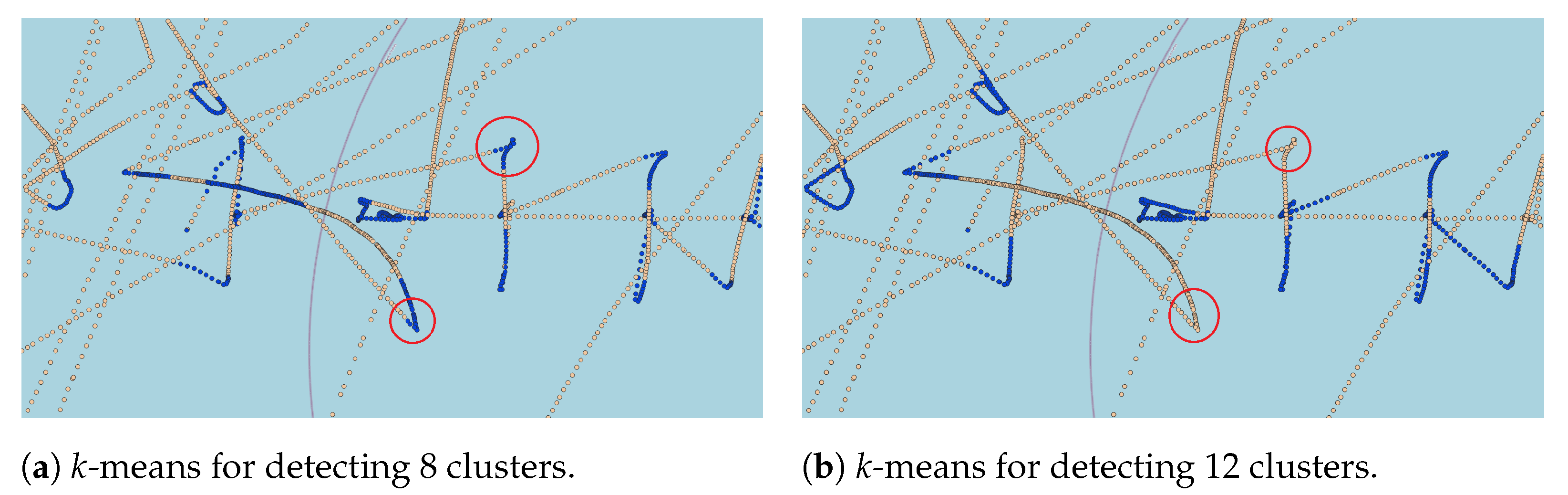
3.1.1. k-Means Clustering Analysis
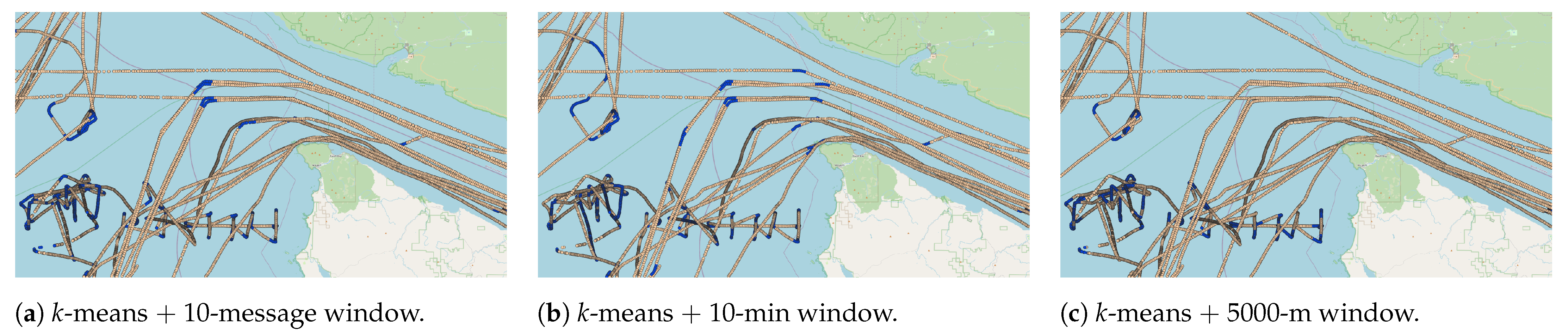
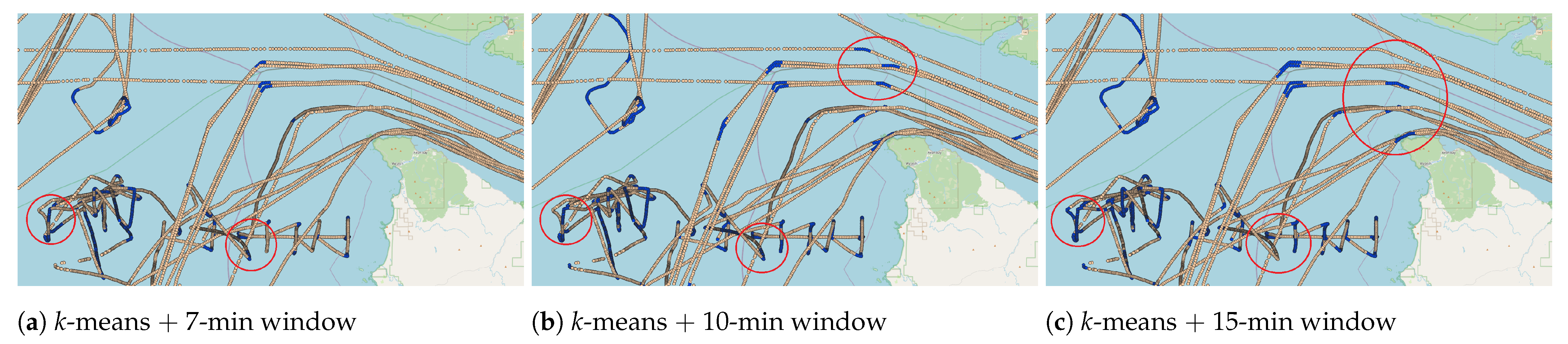
3.1.2. Window-Length Analysis
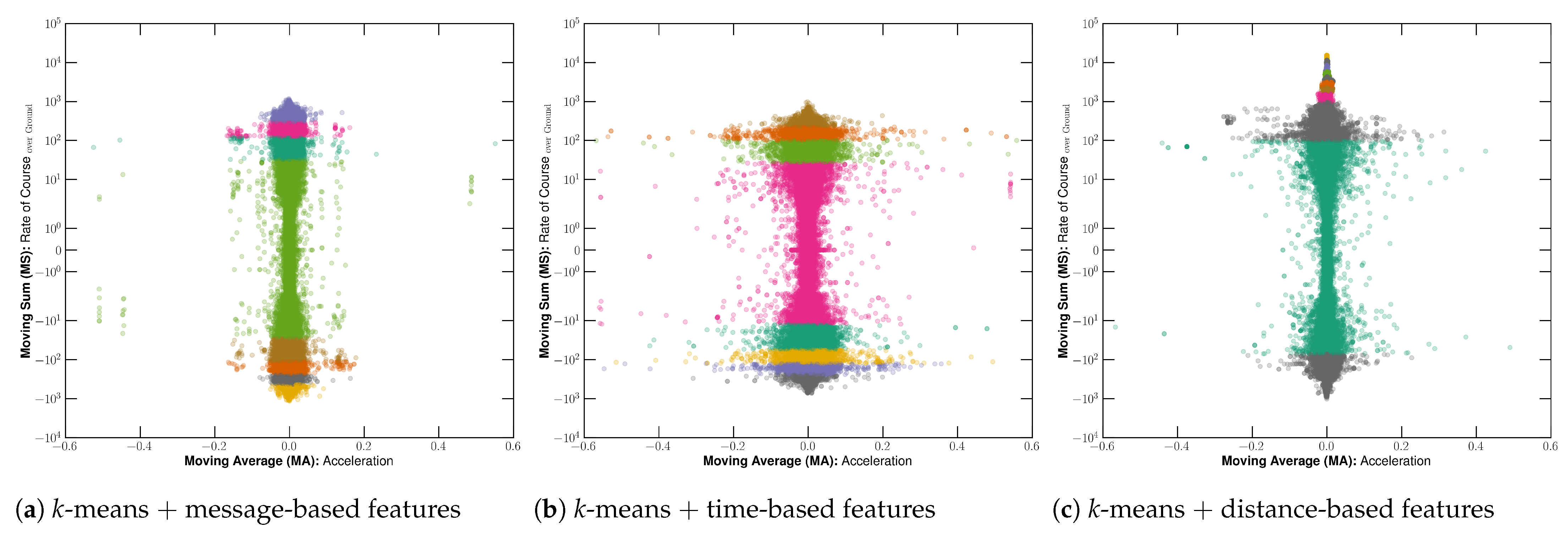
3.1.3. Fishing Detection Feature Analysis
3.2. Analysis of the Supervised Approach
4. Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| AIS | Automatic Identification System |
| BCE | Binary Cross Entropy |
| CL | Center Loss |
| COG | Course Over Ground |
| DBI | Davies-Bouldin index |
| DIU | Defense Innovation Unit |
| GFW | Global Fishing Watch |
| GPS | Global Positioning System |
| GRU | Gated Recurrent Unit |
| IMO | International Maritime Organization |
| IUU | Illegal, Unreported, and Unregulated |
| LSTM | Long Short Term Memory |
| MA | Moving Average |
| MCS | Monitoring, Control, and Surveillance |
| MLP | Multilayer Perceptron |
| MMSI | Maritime Mobile Service Identity |
| MS | Moving Sum |
| PPV | Positive Predictive Value |
| RCOG | Rate of COG |
| ReLU | Rectified Linear Unit |
| RNN | Recurrent Neural Network |
| SOG | Speed Over Ground |
| TNR | True Negative Rate |
| UNCLOS | United Nations Convention on the Law of the Sea |
References
- Hasan, A.M.; Samsudin, K.; Ramli, A.R.; Azmir, R.; Ismaeel, S. A review of navigation systems (integration and algorithms). Aust. J. Basic Appl. Sci. 2009, 3, 943–959. [Google Scholar]
- Robards, M.; Silber, G.; Adams, J.; Arroyo, J.; Lorenzini, D.; Schwehr, K.; Amos, J. Conservation science and policy applications of the marine vessel Automatic Identification System (AIS)—A review. Bull. Mar. Sci. 2016, 92, 75–103. [Google Scholar] [CrossRef]
- Eriksen, T.; Greidanus, H.; Delaney, C. Metrics and provider-based results for completeness and temporal resolution of satellite-based AIS services. Mar. Policy 2018, 93, 80–92. [Google Scholar] [CrossRef]
- Yang, D.; Wu, L.; Wang, S.; Jia, H.; Li, K.X. How big data enriches maritime research – a critical review of Automatic Identification System (AIS) data applications. Transp. Rev. 2019, 39, 755–773. [Google Scholar] [CrossRef]
- Harati-Mokhtari, A.; Wall, A.; Brooks, P.; Wang, J. Automatic Identification System (AIS): Data Reliability and Human Error Implications. J. Navig. 2007, 60, 373–389. [Google Scholar] [CrossRef]
- Norris, A. AIS implementation–success or failure? J. Navig. 2007, 60, 1–10. [Google Scholar] [CrossRef]
- Lee, E.; Mokashi, A.J.; Moon, S.Y.; Kim, G. The maturity of automatic identification systems (AIS) and its implications for innovation. J. Mar. Sci. Eng. 2019, 7, 287. [Google Scholar] [CrossRef]
- Perera, L.P.; Oliveira, P.; Soares, C.G. Maritime Traffic Monitoring Based on Vessel Detection, Tracking, State Estimation, and Trajectory Prediction. IEEE Trans. Intell. Transp. Syst. 2012, 13, 1188–1200. [Google Scholar] [CrossRef]
- Nguyen, D.; Vadaine, R.; Hajduch, G.; Garello, R.; Fablet, R. A Multi-Task Deep Learning Architecture for Maritime Surveillance Using AIS Data Streams. In Proceedings of the 2018 IEEE 5th International Conference on Data Science and Advanced Analytics (DSAA), Turin, Italy, 1–3 October 2018; pp. 331–340. [Google Scholar] [CrossRef]
- Chen, P.; Huang, Y.; Mou, J.; van Gelder, P. Probabilistic risk analysis for ship-ship collision: State-of-the-art. Saf. Sci. 2019, 117, 108–122. [Google Scholar] [CrossRef]
- Petry, L.M.; Soares, A.; Bogorny, V.; Brandoli, B.; Matwin, S. Challenges in Vessel Behavior and Anomaly Detection: From Classical Machine Learning to Deep Learning. In Advances in Artificial Intelligence; Lecture Notes in Computer Science; Springer: Cham, Switzerland, 2020; pp. 401–407. [Google Scholar]
- Abreu, F.H.; Soares, A.; Paulovich, F.V.; Matwin, S. A trajectory scoring tool for local anomaly detection in maritime traffic using visual analytics. ISPRS Int. J. Geo-Inf. 2021, 10, 412. [Google Scholar] [CrossRef]
- Soares, A.; Dividino, R.; Abreu, F.; Brousseau, M.; Isenor, A.W.; Webb, S.; Matwin, S. In Proceedings of the CRISIS: Integrating AIS and Ocean Data Streams Using Semantic Web Standards for Event Detection. 2019 International Conference on Military Communications and Information Systems (ICMCIS), Budva, Montenegro, 14–15 May 2019; pp. 1–7. [Google Scholar] [CrossRef]
- de Almeida, D.R.; de Souza Baptista, C.; de Andrade, F.G.; Soares, A. A Survey on Big Data for Trajectory Analytics. ISPRS Int. J. Geo-Inf. 2020, 9, 88. [Google Scholar] [CrossRef]
- Millefiori, L.M.; Braca, P.; Zissis, D.; Spiliopoulos, G.; Marano, S.; Willett, P.K.; Carniel, S. COVID-19 impact on global maritime mobility. Sci. Rep. 2021, 11, 18039. [Google Scholar] [CrossRef] [PubMed]
- Patmanidis, S.; Voulgaris, I.; Sarri, E.; Papavassilopoulos, G.; Papavasileiou, G. Maritime surveillance, vessel route estimation and alerts using AIS data. In Proceedings of the 2016 24th Mediterranean Conference on Control and Automation (MED), Athens, Greece, 21–24 June 2016; pp. 809–813. [Google Scholar] [CrossRef]
- Nguyen, D.; Fablet, R. TrAISformer—A generative transformer for AIS trajectory prediction. arXiv 2021, arXiv:2109.03958. [Google Scholar]
- Jennings, S.; Kaiser, M.J. The Effects of Fishing on Marine Ecosystems. In Advances in Marine Biology; Blaxter, J., Southward, A., Tyler, P., Eds.; Elsevier: Amsterdam, The Netherlands, 1998; Volume 34, pp. 201–352. [Google Scholar] [CrossRef]
- Temple, A.J.; Skerritt, D.J.; Howarth, P.E.; Pearce, J.; Mangi, S.C. Illegal, unregulated and unreported fishing impacts: A systematic review of evidence and proposed future agenda. Mar. Policy 2022, 139, 105033. [Google Scholar] [CrossRef]
- Fu, P.; Wang, H.; Liu, K.; Hu, X.; Zhang, H. Finding abnormal vessel trajectories using feature learning. IEEE Access 2017, 5, 7898–7909. [Google Scholar] [CrossRef]
- Nguyen, D.; Vadaine, R.; Hajduch, G.; Garello, R.; Fablet, R. GeoTrackNet: A Maritime Anomaly Detector Using Probabilistic Neural Network Representation of AIS Tracks and A Contrario Detection. IEEE Trans. Intell. Transp. Syst. 2022, 23, 5655–5667. [Google Scholar] [CrossRef]
- Tetreault, B. Use of the Automatic Identification System (AIS) for Maritime Domain Awareness (MDA). In Proceedings of the OCEANS 2005 MTS/IEEE, Washington, DC, USA, 17–23 September 2005; Volume 2, pp. 1590–1594. [Google Scholar] [CrossRef]
- Wang, L.; Chen, P.; Chen, L.; Mou, J. Ship AIS Trajectory Clustering: An HDBSCAN-Based Approach. J. Mar. Sci. Eng. 2021, 9, 566. [Google Scholar] [CrossRef]
- Guo, S.; Mou, J.; Chen, L.; Chen, P. An Anomaly Detection Method for AIS Trajectory Based on Kinematic Interpolation. J. Mar. Sci. Eng. 2021, 9, 609. [Google Scholar] [CrossRef]
- Pallotta, G.; Vespe, M.; Bryan, K. Vessel Pattern Knowledge Discovery from AIS Data: A Framework for Anomaly Detection and Route Prediction. Entropy 2013, 15, 2218–2245. [Google Scholar] [CrossRef]
- Walker, T.R.; Adebambo, O.; Feijoo, M.C.D.A.; Elhaimer, E.; Hossain, T.; Edwards, S.J.; Morrison, C.E.; Romo, J.; Sharma, N.; Taylor, S.; et al. Environmental Effects of Marine Transportation. In World Seas: An Environmental Evaluation, 2nd ed.; Sheppard, C., Ed.; Elsevier: Amsterdam, The Netherlands, 2019; pp. 505–530. [Google Scholar] [CrossRef]
- Li, H.; Liu, J.; Wu, K.; Yang, Z.; Liu, R.W.; Xiong, N. Spatio-temporal vessel trajectory clustering based on data mapping and density. IEEE Access 2018, 6, 58939–58954. [Google Scholar] [CrossRef]
- Suo, Y.; Ji, Y.; Zhang, Z.; Chen, J.; Claramunt, C. A Formal and Visual Data-Mining Model for Complex Ship Behaviors and Patterns. Sensors 2022, 22, 5281. [Google Scholar] [CrossRef] [PubMed]
- Behivoke, F.; Etienne, M.P.; Guitton, J.; Randriatsara, R.M.; Ranaivoson, E.; Léopold, M. Estimating fishing effort in small-scale fisheries using GPS tracking data and random forests. Ecol. Indic. 2021, 123, 107321. [Google Scholar] [CrossRef]
- de Souza, E.N.; Boerder, K.; Matwin, S.; Worm, B. Improving fishing pattern detection from satellite AIS using data mining and machine learning. PLoS ONE 2016, 11, e0158248. [Google Scholar]
- Schmidt, C.C. Economic Drivers of Illegal, Unreported and Unregulated (IUU) Fishing. Int. J. Mar. Coast. Law 2005, 20, 479–507. [Google Scholar] [CrossRef]
- Cisneros-Montemayor, A.M.; Cisneros-Mata, M.A.; Harper, S.; Pauly, D. Extent and implications of IUU catch in Mexico’s marine fisheries. Mar. Policy 2013, 39, 283–288. [Google Scholar] [CrossRef]
- Shen, K.; Chu, Y.; Chang, S.; Chang, S. A study of correlation between fishing activity and AIS data by deep learning. Transnav Int. J. Mar. Navig. Saf. Sea Transp. 2020, 14, 527–531. [Google Scholar] [CrossRef]
- Bergh, P.E.; Davies, S. Fishery Monitoring, Control and Surveillance; FAO Fisheries Technical Paper; FAO: Rome, Italy, 2002; pp. 175–204. [Google Scholar]
- Mazzarella, F.; Vespe, M.; Alessandrini, A.; Tarchi, D.; Aulicino, G.; Vollero, A. A novel anomaly detection approach to identify intentional AIS on-off switching. Expert Syst. Appl. 2017, 78, 110–123. [Google Scholar] [CrossRef]
- d’Afflisio, E.; Braca, P.; Willett, P. Malicious AIS Spoofing and Abnormal Stealth Deviations: A Comprehensive Statistical Framework for Maritime Anomaly Detection. IEEE Trans. Aerosp. Electron. Syst. 2021, 57, 2093–2108. [Google Scholar] [CrossRef]
- Etemad, M.; Etemad, Z.; Soares, A.; Bogorny, V.; Matwin, S.; Torgo, L. Wise sliding window segmentation: A classification-aided approach for trajectory segmentation. In Proceedings of the Canadian Conference on Artificial Intelligence, Ottawa, ON, Canada, 13–15 May 2020; Springer: Cham, Switzerland, 2020; pp. 208–219. [Google Scholar]
- Etemad, M.; Soares, A.; Etemad, E.; Rose, J.; Torgo, L.; Matwin, S. SWS: An unsupervised trajectory segmentation algorithm based on change detection with interpolation kernels. GeoInformatica 2021, 25, 269–289. [Google Scholar] [CrossRef]
- Soares Júnior, A.; Moreno, B.N.; Times, V.C.; Matwin, S.; Cabral, L.d.A.F. GRASP-UTS: An algorithm for unsupervised trajectory segmentation. Int. J. Geogr. Inf. Sci. 2015, 29, 46–68. [Google Scholar] [CrossRef]
- Junior, A.S.; Times, V.C.; Renso, C.; Matwin, S.; Cabral, L.A. A semi-supervised approach for the semantic segmentation of trajectories. In Proceedings of the 2018 19th IEEE International Conference on Mobile Data Management (MDM), Aalborg, Denmark, 25–28 June 2018; pp. 145–154. [Google Scholar]
- Erdelić, M.; Carić, T.; Erdelić, T.; Tišljarić, L. Transition State Matrices Approach for Trajectory Segmentation Based on Transport Mode Change Criteria. Sustainability 2022, 14, 2756. [Google Scholar] [CrossRef]
- Elman, J. Finding structure in time. Cogn. Sci. 1990, 14, 179–211. [Google Scholar] [CrossRef]
- Harsem, Ø.; Hoel, A.H. Climate change and adaptive capacity in fisheries management: The case of Norway. Int. Environ. Agreements Politics Law Econ. 2013, 13, 49–63. [Google Scholar] [CrossRef]
- Hosch, G.; Macfadyen, G. Killing Nemo: Three world regions fail to mainstream combatting of IUU fishing. Mar. Policy 2022, 140, 105073. [Google Scholar] [CrossRef]
- Chapelle, O.; Schlkopf, B.; Zien, A. Semi-Supervised Learning. IEEE Trans. Neural Netw. 2006, 20, 1–12. [Google Scholar] [CrossRef]
- Van Engelen, J.E.; Hoos, H.H. A survey on semi-supervised learning. Mach. Learn. 2020, 109, 373–440. [Google Scholar] [CrossRef]
- Liu, B. Maritime Traffic Anomaly Detection from AIS Satellite Data in Near Port Regions. Ph.D. Thesis, Dalhousie University, Halifax, NS, Canada, 2015. [Google Scholar]
- Lloyd, S. Least squares quantization in PCM. IEEE Trans. Inf. Theory 1982, 28, 129–137. [Google Scholar] [CrossRef]
- Spadon, G.; Ferreira, M.D.; Soares, A.; Matwin, S. Unfolding collective AIS transmission behavior for vessel movement modeling on irregular timing data using noise-robust neural networks. arXiv 2022, arXiv:2202.13867. [Google Scholar]
- Haykin, S. Neural Networks: A Comprehensive Foundation; Prentice Hall PTR: Hoboken, HJ, USA, 1994. [Google Scholar]
- Wen, Y.; Zhang, K.; Li, Z.; Qiao, Y. A Discriminative Feature Learning Approach for Deep Face Recognition. In Proceedings of the Computer Vision—ECCV 2016, Amsterdam, The Netherlands, 11–14 October 2016; Leibe, B., Matas, J., Sebe, N., Welling, M., Eds.; Springer International Publishing: Cham, Switzerland, 2016; pp. 499–515. [Google Scholar]
- Good, I.J. Rational Decisions. J. R. Stat. Soc. Ser. B (Methodol.) 1952, 14, 107–114. [Google Scholar] [CrossRef]
- Loshchilov, I.; Hutter, F. Decoupled Weight Decay Regularization. arXiv 2017, arXiv:1711.05101. [Google Scholar]
- Chung, J.; Gulcehre, C.; Cho, K.; Bengio, Y. Empirical Evaluation of Gated Recurrent Neural Networks on Sequence Modeling. arXiv 2014, arXiv:1412.3555. [Google Scholar]
- Hochreiter, S.; Schmidhuber, J. Long Short-Term Memory. Neural Comput. 1997, 9, 1735–1780. [Google Scholar] [CrossRef] [PubMed]
- Powers, D.M.W. Evaluation: From precision, recall and F-measure to ROC, informedness, markedness and correlation. Int. J. Mach. Learn. Technol. 2011, 2, 37–63. [Google Scholar]
- Cannon, G.A. Circulation in the Strait of Juan de Fuca: Some Recent Oceanographic Observations; Number v. 55 in Circulation in the Strait of Juan de Fuca: Some Recent Oceanographic Observations; Department of Commerce, National Oceanic and Atmospheric Administration, Environmental Research Laboratories: Seattle, WA, USA, 1978.








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Sailing | Fishing | Macro Average | |||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| w-Size | h-Size | Precision | Recall | F-Score | Support | Precision | Recall | F-Score | Support | Precision | Recall | F-Score | Support | Parameters | Feature |
| 5 | 32 | 87.90% | 97.87% | 92.62% | 18,114 | 79.48% | 37.98% | 51.40% | 3936 | 83.69% | 67.93% | 72.01% | 22,050 | 5704 | O |
| 5 | 64 | 91.27% | 97.76% | 94.40% | 18,114 | 84.67% | 56.96% | 68.10% | 3936 | 87.97% | 77.36% | 81.25% | 22,050 | 21,640 | O |
| 5 | 128 | 92.73% | 97.42% | 95.01% | 18,114 | 84.50% | 64.84% | 73.38% | 3936 | 88.62% | 81.13% | 84.19% | 22,050 | 84,232 | O |
| 10 | 32 | 93.37% | 97.57% | 95.42% | 13,319 | 87.92% | 71.87% | 79.09% | 3281 | 90.64% | 84.72% | 87.25% | 16,600 | 5864 | O |
| 10 | 64 | 93.46% | 97.60% | 95.49% | 13,319 | 88.14% | 72.26% | 79.42% | 3281 | 90.80% | 84.93% | 87.45% | 16,600 | 21,960 | O |
| 10 | 128 | 93.64% | 97.62% | 95.59% | 13,319 | 88.32% | 73.09% | 79.99% | 3281 | 90.98% | 85.35% | 87.79% | 16,600 | 84872 | O |
| 15 | 32 | 92.16% | 97.10% | 94.56% | 8941 | 88.38% | 72.72% | 79.79% | 2709 | 90.27% | 84.91% | 87.18% | 11,650 | 6024 | O |
| 15 | 64 | 91.85% | 97.10% | 94.41% | 8941 | 88.22% | 71.58% | 79.03% | 2709 | 90.04% | 84.34% | 86.72% | 11,650 | 22,280 | O |
| 15 | 128 | 92.41% | 96.96% | 94.63% | 8941 | 88.01% | 73.72% | 80.23% | 2709 | 90.21% | 85.34% | 87.43% | 11,650 | 85,512 | O |
| 5 | 32 | 91.95% | 95.95% | 93.91% | 18,391 | 73.97% | 57.78% | 64.88% | 3659 | 82.96% | 76.86% | 79.39% | 22,050 | 5704 | T |
| 5 | 64 | 88.33% | 97.06% | 92.49% | 18,391 | 70.63% | 35.56% | 47.30% | 3659 | 79.48% | 66.31% | 69.89% | 22,050 | 21,640 | T |
| 5 | 128 | 92.95% | 96.33% | 94.61% | 18,391 | 77.42% | 63.27% | 69.63% | 3659 | 85.19% | 79.80% | 82.12% | 22,050 | 84,232 | T |
| 10 | 32 | 92.32% | 95.40% | 93.83% | 13,432 | 77.28% | 66.35% | 71.40% | 3,168 | 84.80% | 80.88% | 82.62% | 16,600 | 5864 | T |
| 10 | 64 | 92.18% | 95.81% | 93.96% | 13,432 | 78.67% | 65.53% | 71.50% | 3168 | 85.42% | 80.67% | 82.73% | 16,600 | 21,960 | T |
| 10 | 128 | 92.00% | 96.02% | 93.97% | 13,432 | 79.31% | 64.61% | 71.21% | 3168 | 85.66% | 80.32% | 82.59% | 16,600 | 84,872 | T |
| 15 | 32 | 89.80% | 95.31% | 92.47% | 8947 | 80.50% | 64.15% | 71.40% | 2703 | 85.15% | 79.73% | 81.94% | 11,650 | 6024 | T |
| 15 | 64 | 90.27% | 95.55% | 92.83% | 8947 | 81.73% | 65.89% | 72.96% | 2703 | 86.00% | 80.72% | 82.90% | 11,650 | 22,280 | T |
| 15 | 128 | 90.20% | 95.76% | 92.90% | 8947 | 82.38% | 65.56% | 73.01% | 2703 | 86.29% | 80.66% | 82.96% | 11,650 | 85512 | T |
| 5 | 32 | 86.53% | 97.71% | 91.78% | 18,114 | 74.01% | 30.03% | 42.73% | 3936 | 80.27% | 63.87% | 67.25% | 22,050 | 5704 | D |
| 5 | 64 | 88.15% | 97.75% | 92.70% | 18,114 | 79.26% | 39.51% | 52.73% | 3936 | 83.70% | 68.63% | 72.72% | 22,050 | 21,640 | D |
| 5 | 128 | 87.45% | 98.10% | 92.47% | 18,114 | 80.06% | 35.19% | 48.89% | 3936 | 83.75% | 66.64% | 70.68% | 22050 | 84,232 | D |
| 10 | 32 | 88.43% | 97.28% | 92.65% | 13,319 | 81.42% | 48.34% | 60.66% | 3281 | 84.92% | 72.81% | 76.65% | 16,600 | 5864 | D |
| 10 | 64 | 88.72% | 97.51% | 92.90% | 13,319 | 83.07% | 49.65% | 62.15% | 3281 | 85.89% | 73.58% | 77.53% | 16,600 | 21,960 | D |
| 10 | 128 | 86.64% | 96.64% | 91.36% | 13,319 | 74.31% | 39.50% | 51.58% | 3281 | 80.48% | 68.07% | 71.47% | 16,600 | 84,872 | D |
| 15 | 32 | 86.14% | 95.57% | 90.61% | 8941 | 77.11% | 49.24% | 60.10% | 2709 | 81.62% | 72.41% | 75.36% | 11,650 | 6024 | D |
| 15 | 64 | 87.48% | 96.39% | 91.72% | 8941 | 82.05% | 54.49% | 65.48% | 2709 | 84.76% | 75.44% | 78.60% | 11,650 | 22,280 | D |
| 15 | 128 | 82.83% | 96.51% | 89.15% | 8941 | 74.68% | 33.96% | 46.69% | 2709 | 78.75% | 65.24% | 67.92% | 11,650 | 85,512 | D |
| Sailing | Fishing | Macro Average | ||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Unit | Precision | Recall | F-Score | Support | Precision | Recall | F-Score | Support | Precision | Recall | F-Score | Support | Parameters | Feature |
| GRU | 93.26% | 97.89% | 95.52% | 13,319 | 89.27% | 71.29% | 79.27% | 3281 | 91.27% | 84.59% | 87.40% | 16,600 | 64,200 | O |
| LSTM | 93.32% | 97.57% | 95.40% | 13,319 | 87.92% | 71.62% | 78.94% | 3281 | 90.62% | 84.60% | 87.17% | 16,600 | 85,320 | O |
| GRU | 92.21% | 95.82% | 93.98% | 13,432 | 78.74% | 65.69% | 71.62% | 3168 | 85.47% | 80.75% | 82.80% | 16,600 | 64,200 | T |
| LSTM | 92.44% | 95.76% | 94.07% | 13,432 | 78.81% | 66.79% | 72.30% | 3168 | 85.62% | 81.28% | 83.19% | 16,600 | 85,320 | T |
| GRU | 89.96% | 97.31% | 93.49% | 13,319 | 83.67% | 55.90% | 67.02% | 3281 | 86.81% | 76.60% | 80.26% | 16,600 | 64,200 | D |
| LSTM | 89.27% | 97.29% | 93.11% | 13,319 | 82.69% | 52.54% | 64.26% | 3281 | 85.98% | 74.92% | 78.68% | 16,600 | 85,320 | D |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ferreira, M.D.; Spadon, G.; Soares, A.; Matwin, S. A Semi-Supervised Methodology for Fishing Activity Detection Using the Geometry behind the Trajectory of Multiple Vessels. Sensors 2022, 22, 6063. https://doi.org/10.3390/s22166063
Ferreira MD, Spadon G, Soares A, Matwin S. A Semi-Supervised Methodology for Fishing Activity Detection Using the Geometry behind the Trajectory of Multiple Vessels. Sensors. 2022; 22(16):6063. https://doi.org/10.3390/s22166063
Chicago/Turabian StyleFerreira, Martha Dais, Gabriel Spadon, Amilcar Soares, and Stan Matwin. 2022. "A Semi-Supervised Methodology for Fishing Activity Detection Using the Geometry behind the Trajectory of Multiple Vessels" Sensors 22, no. 16: 6063. https://doi.org/10.3390/s22166063
APA StyleFerreira, M. D., Spadon, G., Soares, A., & Matwin, S. (2022). A Semi-Supervised Methodology for Fishing Activity Detection Using the Geometry behind the Trajectory of Multiple Vessels. Sensors, 22(16), 6063. https://doi.org/10.3390/s22166063