
Mobility Management of Unmanned Aerial Vehicles in Ultra–Dense Heterogeneous Networks

 ,
,  , ,
, , 
Abstract
:1. Introduction
2. UAV Technology in Wireless Communication
2.1. Overview of UAVs
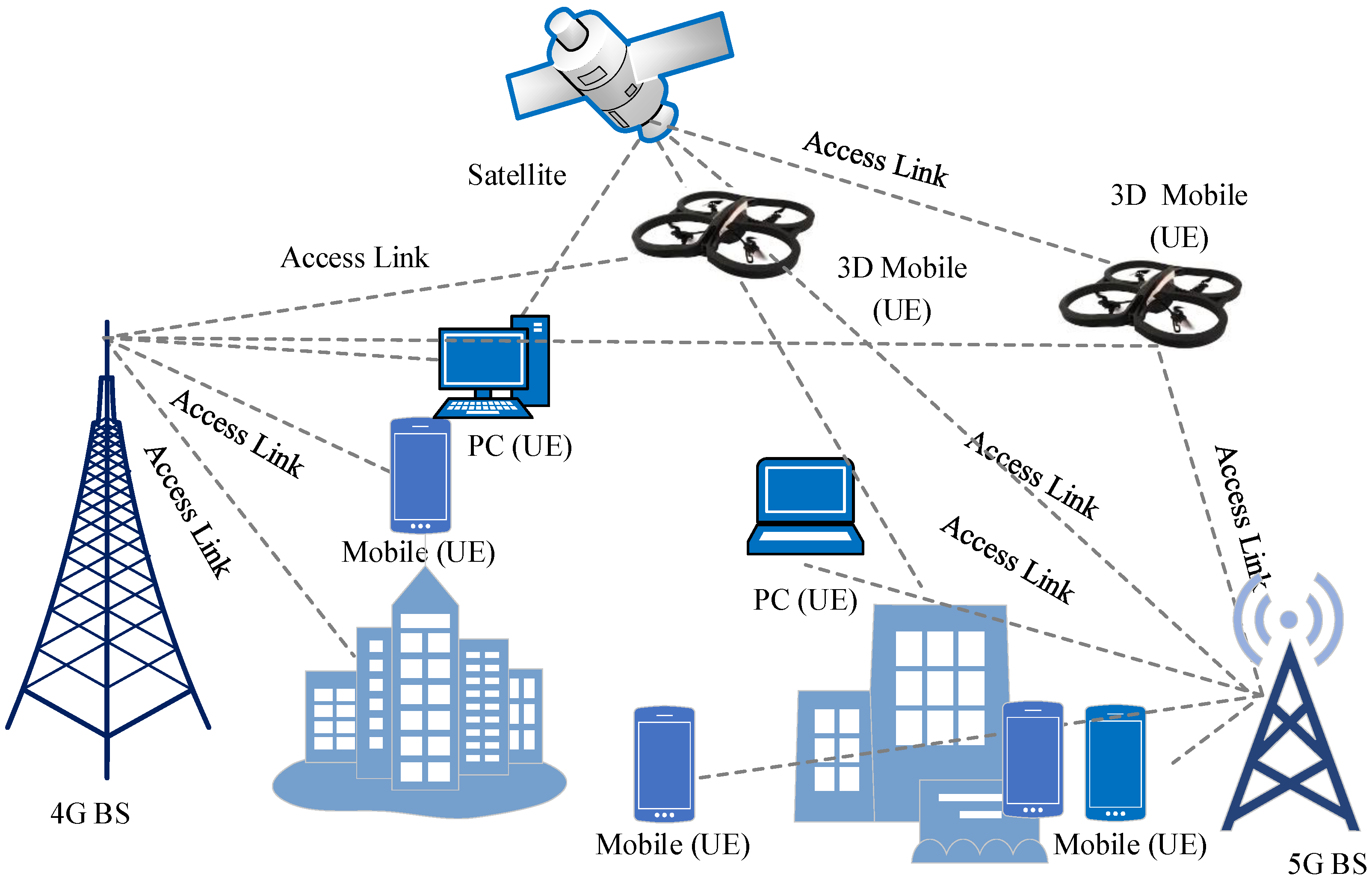
2.2. UAV Communication Network
2.3. Antenna Tilting and Cell Association
2.4. UAV Communication Scenarios
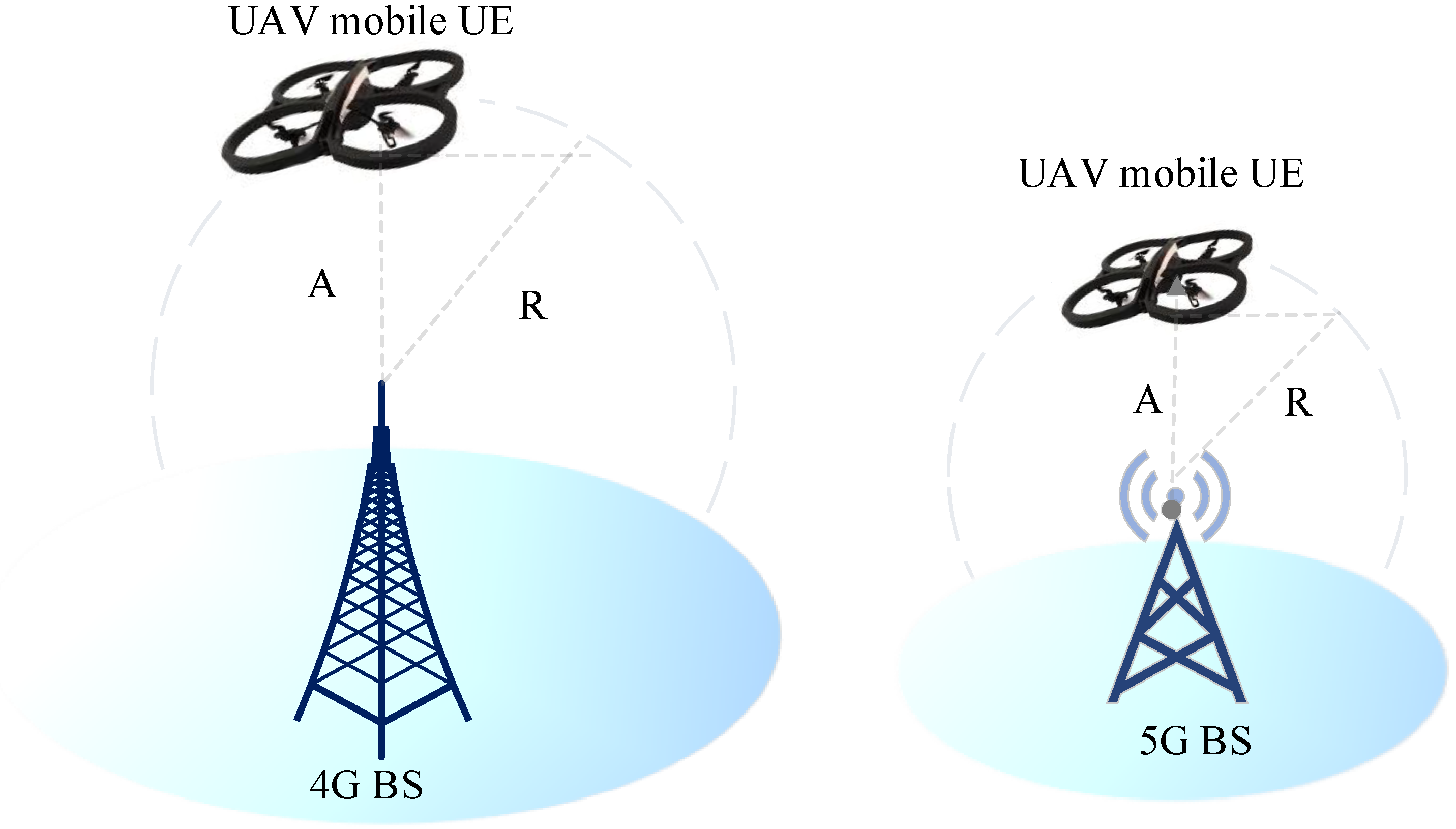
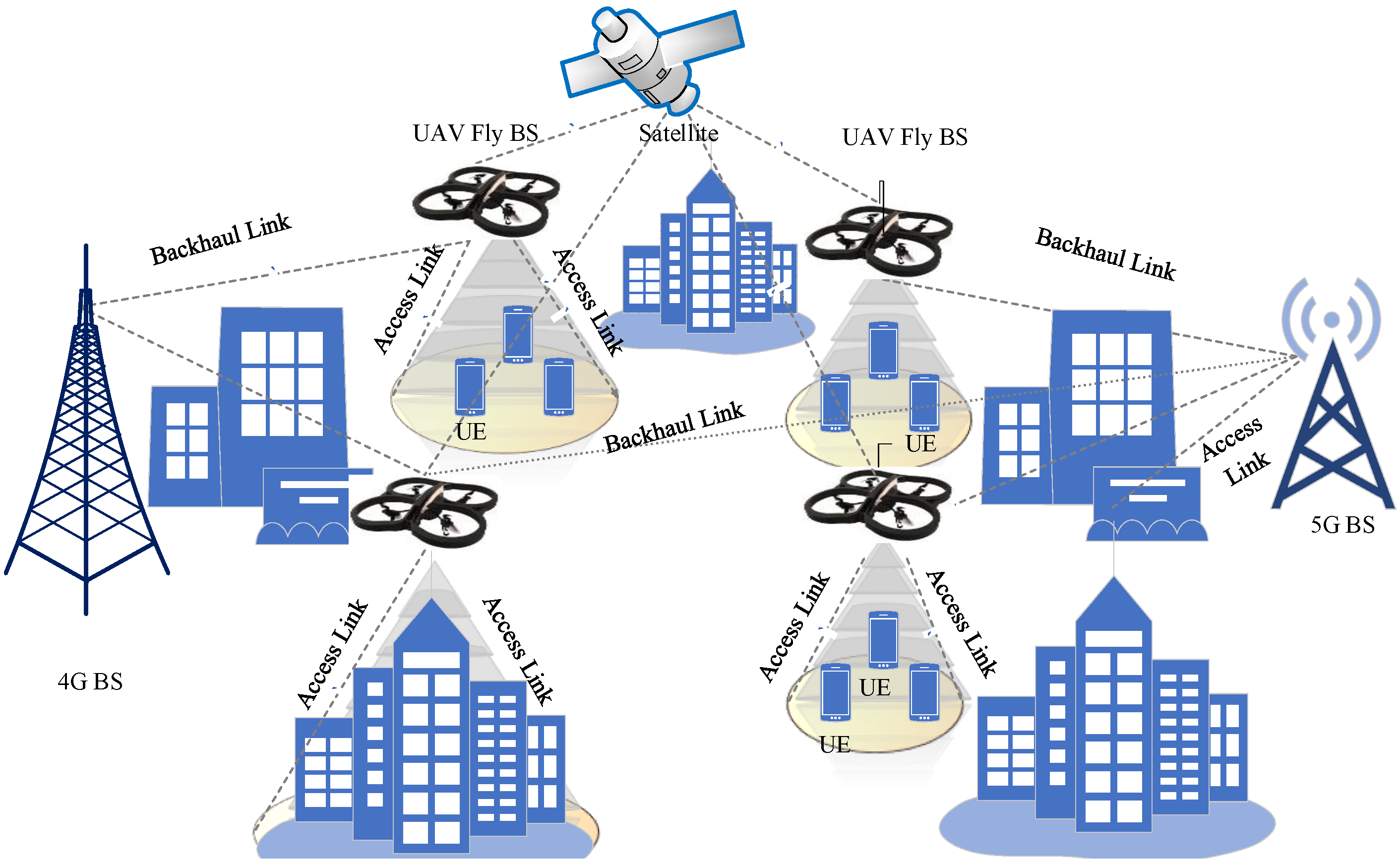
2.4.1. Flying Base Stations
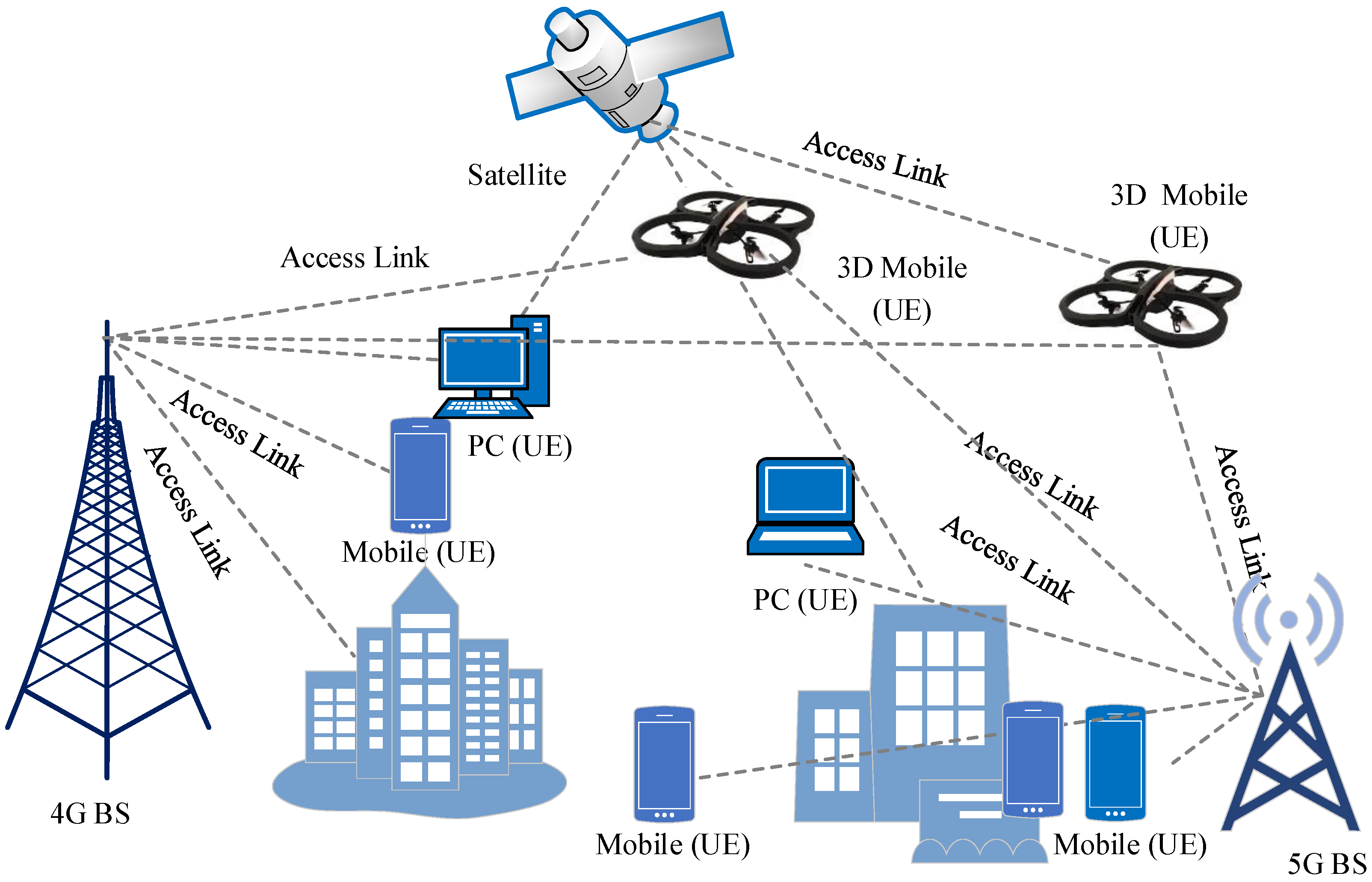
2.4.2. Normal User
2.5. UAVs in 5G Networks
3. Mobility with UAV Technology
3.1. Mobility Management Concept
3.2. Handover Concept
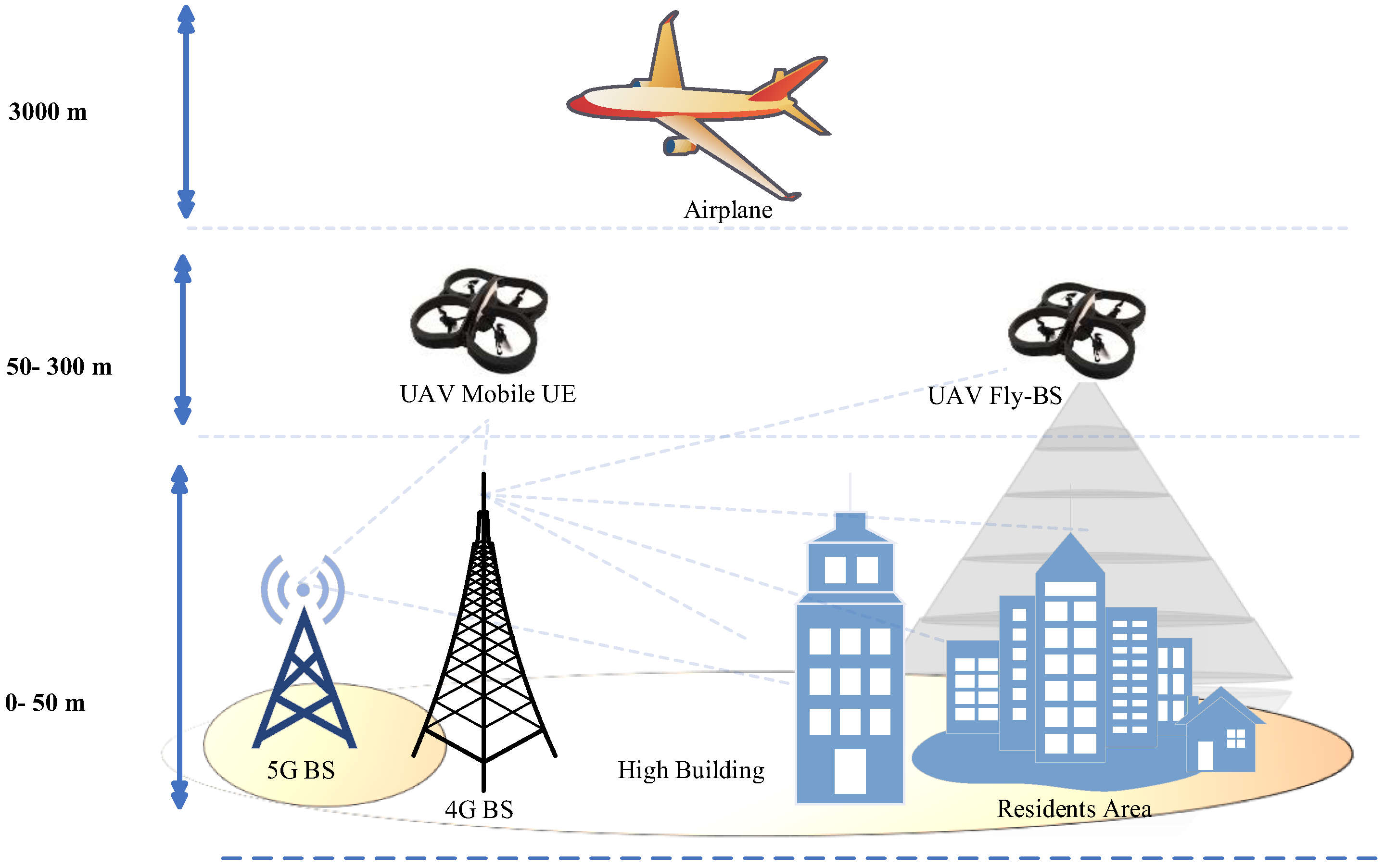
3.3. Mobility in Three Dimension (3D)
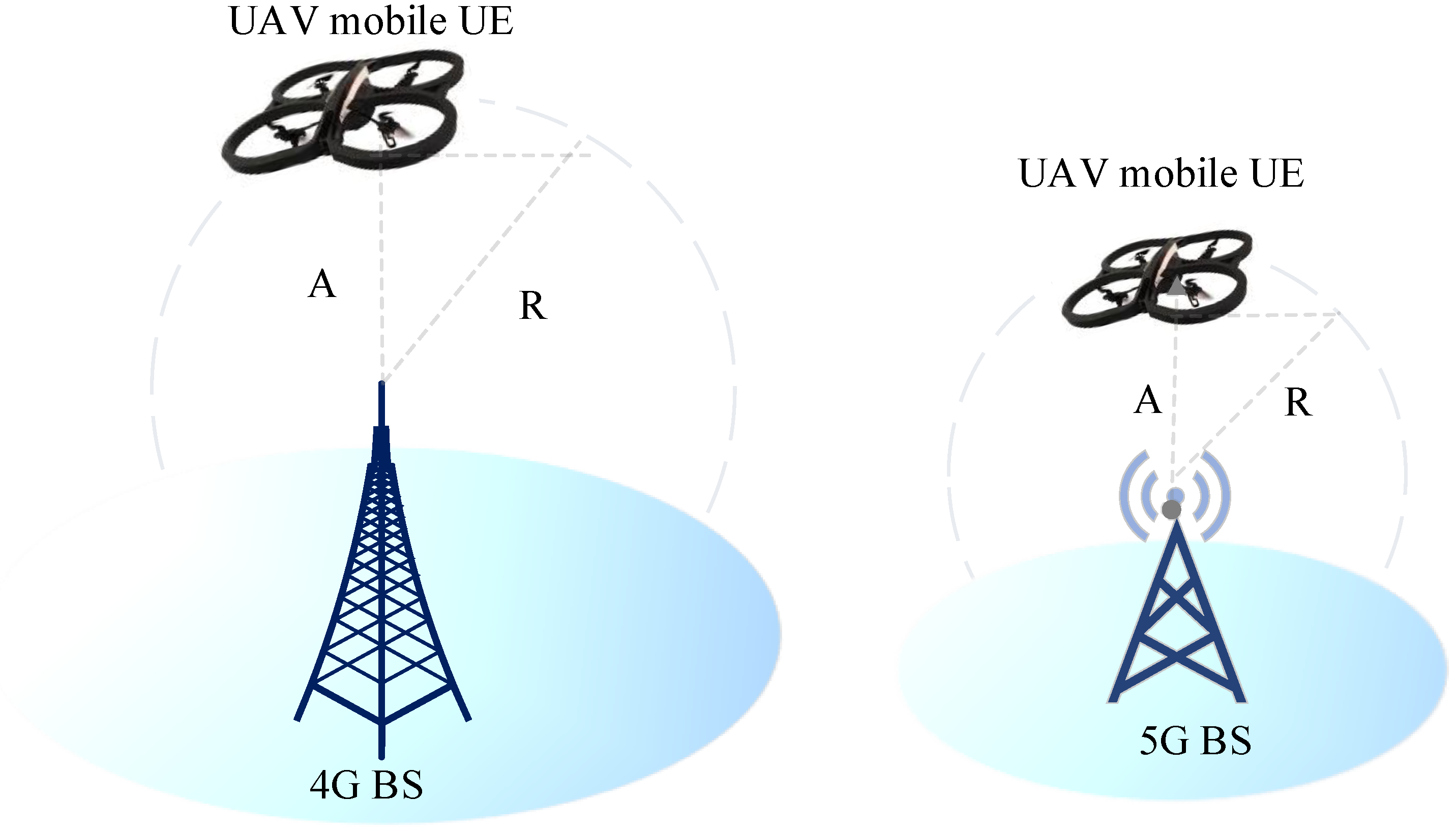
3.3.1. Communication Coverage in 3D
3.3.2. Speed Limitation in 3D
3.4. Handover in UAV Networks
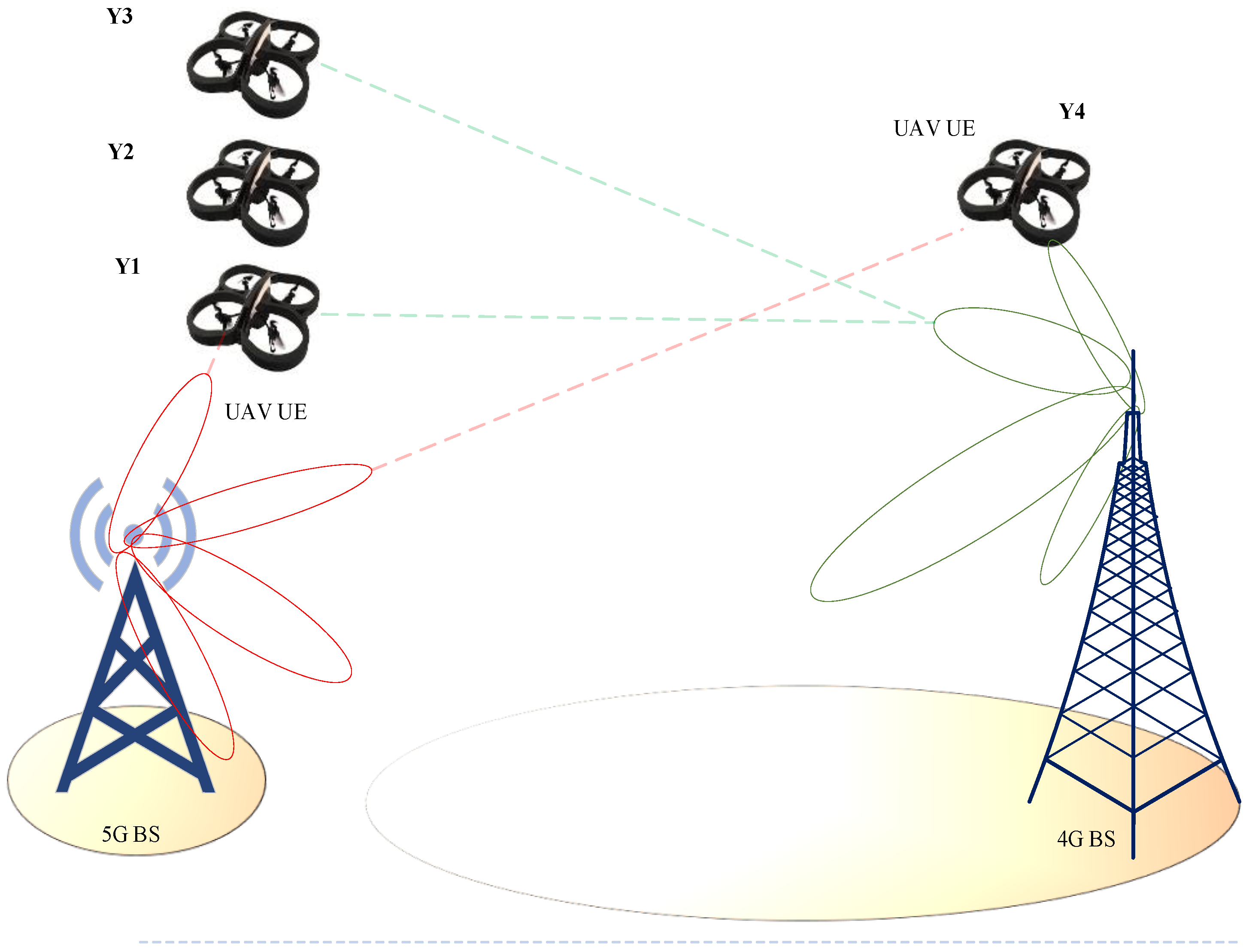
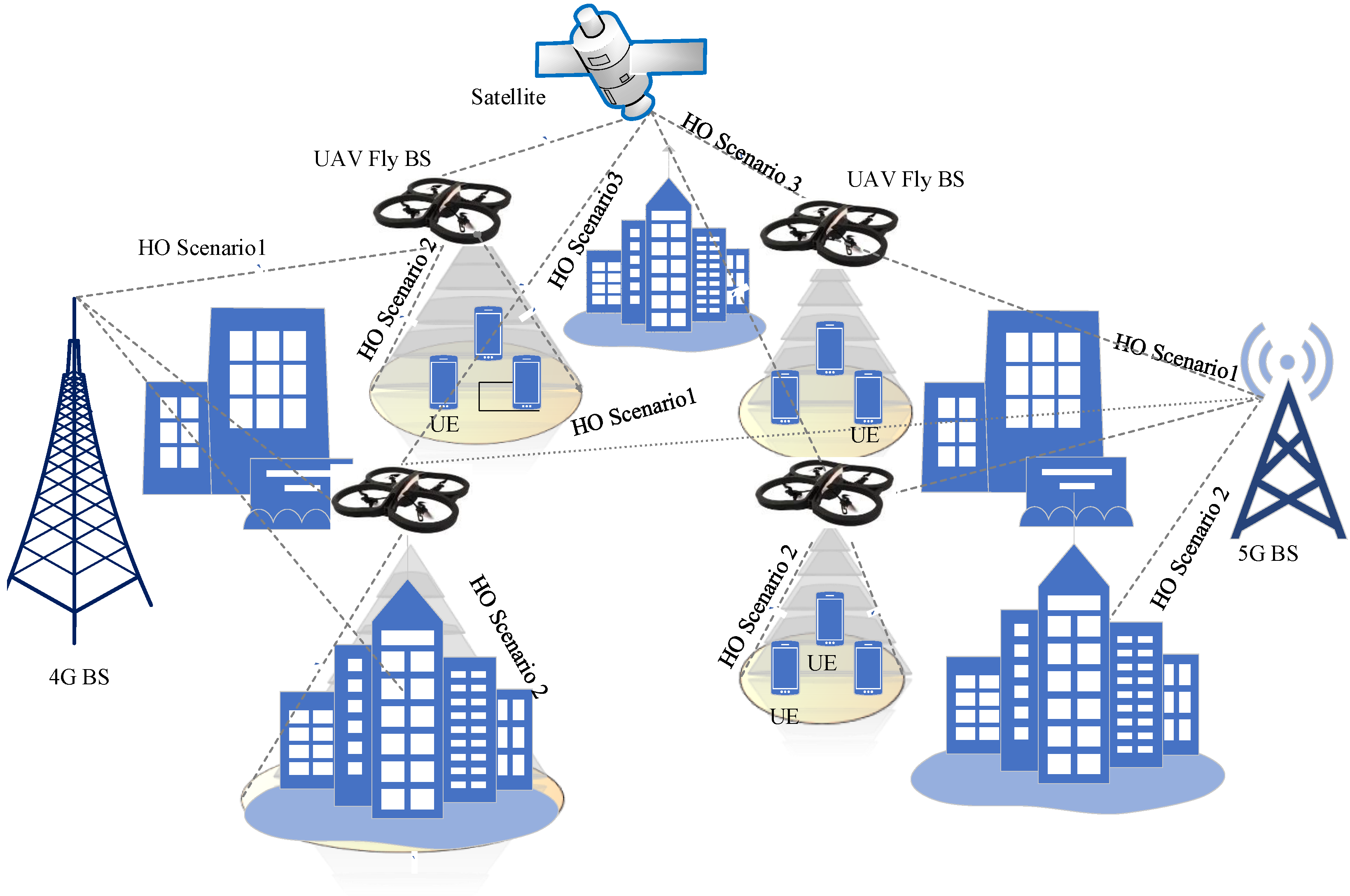
3.5. UAV Handover Scenarios
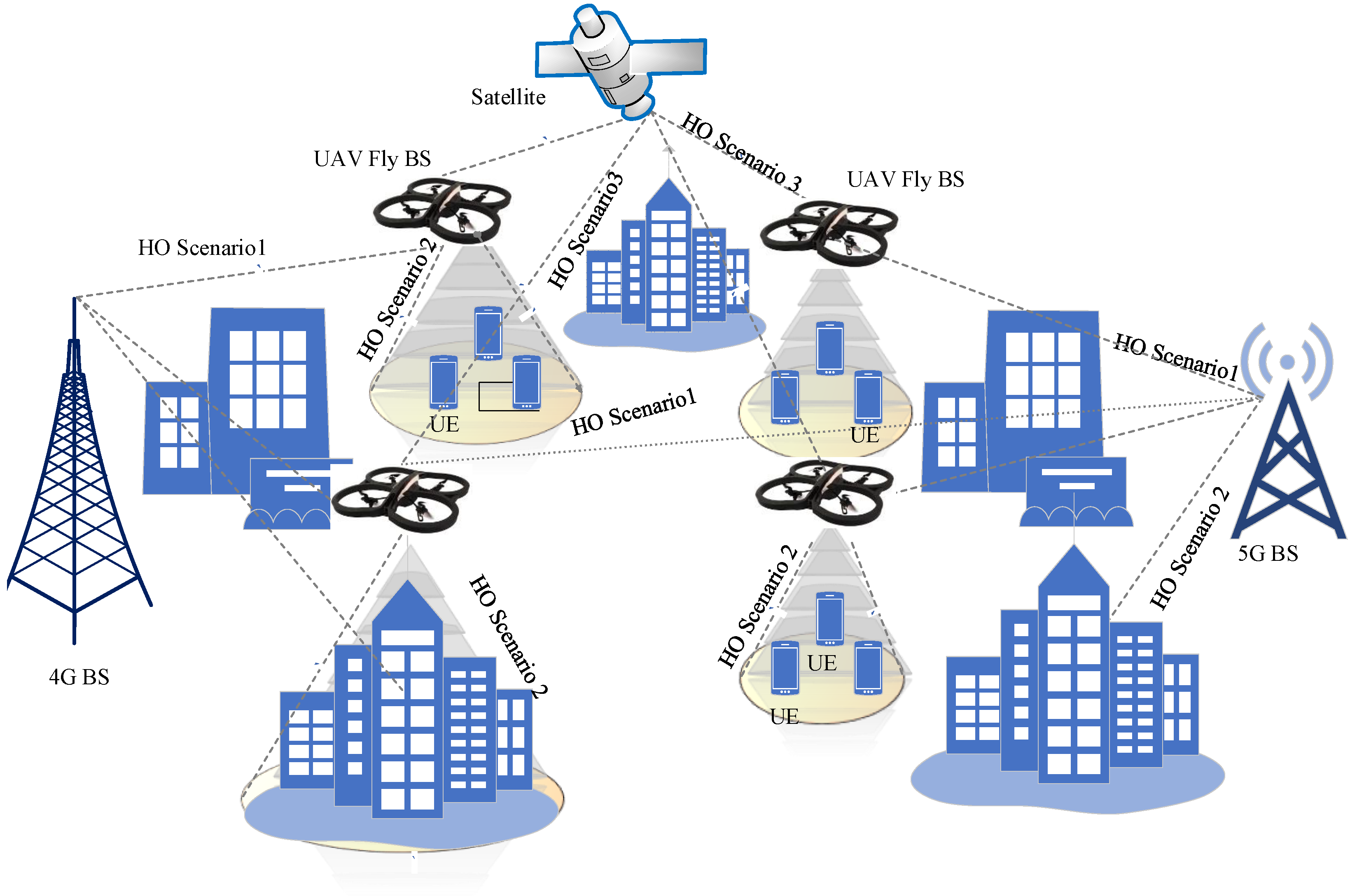
3.5.1. HO Scenarios with Flying Base Stations
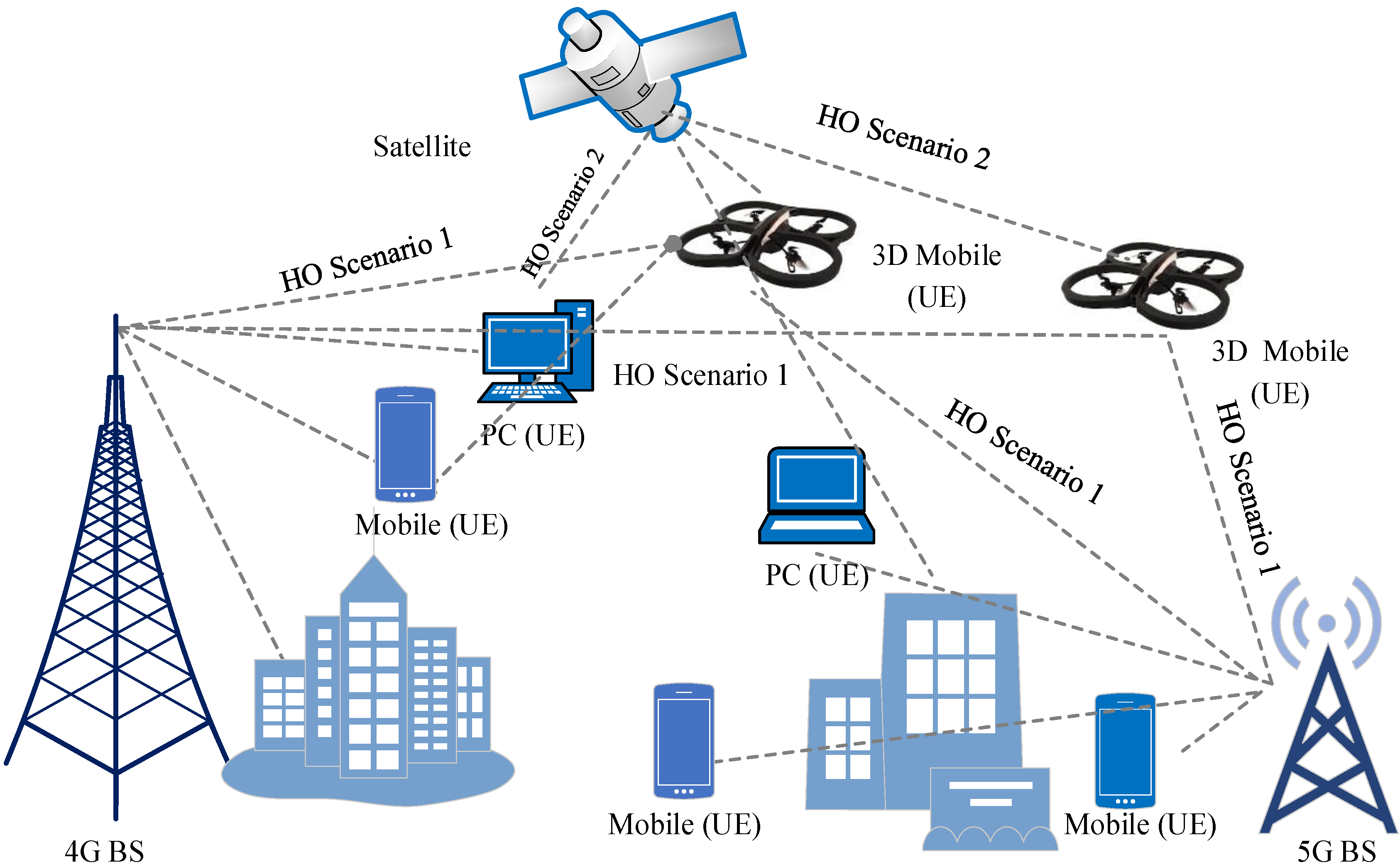
3.5.2. HO Scenarios with Normal User
3.6. UAV Handover Based on Machine/Deep Learning
4. Research Challenges
4.1. General Challenges of Connected UAVs
4.2. UAV Operations in LTE
4.3. Mobility in 3D
4.4. UAV to Ground Channel
- In the free–space channel model, fading and shadowing have little effect and interference is low. This method is most effective in areas where the LoS assumption holds true between high–altitude UAV s and ground stations. Low–altitude UAVs may encounter non–LoS connections in urban environments, necessitating the use of additional methods to accurately assess the propagation environment.
- In altitude/angle–dependent channel models, channel characteristics, such as shadowing and path loss exponents, are affected by the UAV’s elevation or angle. Depending on the deployment, these varieties can be used in residential or sub–residential settings. Altitude–dependent models may not be appropriate if the height does not change or if UAVs fly horizontally. In analytical research, models based on elevation angles are commonly applied, but there is insufficient literature on the subject.
- Due to buildings, obstructions, or bottlenecks, approaches based on probabilistic LoS models are frequently allowed for residential scenarios where the LoS and NLoS links between UAVs and the ground are recognized. The LoS and NLoS components are separately displayed according to their likelihood of occurrence in a home environment. Their characteristics propagation are statistically determined by the nature of the residential environment in terms of building height and density.
4.5. Transmission Protocols
4.6. Dominance of LoS
5. Related Works

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| No | Author | Contribution | Limitations\Research Areas |
|---|---|---|---|
| 1 | Azari | To overcome the HO and Radio Resource Management (H–RRM) problem, a deep reinforcement learning approach was developed [84]. | It concentrated on UAV as a user while ignoring UAV implementation as fly BS. |
| 2 | Yun Chen | A unique HO framework was offered to provide competent mobility support and a reliable wireless network to UAVs that are supported by a terrestrial cellular network. A deep Q–learning strategy was created to powerfully optimize HO decisions, ensuring a robust network for UAV users using instruments from deep reinforcement learning [110]. | It did not address the inclusion of 3D UAV mobility in the present framework. |
| 3 | Park et al. | A coverage choice method was presented for UAV networks. UAV network restrictions, such as battery capacity and HO management, have caused faulty communication and other issues, such as frequent HOs [78]. | It restricts the key points on UAV height while ignoring all other aspects. |
| 4 | Park et al. | As a continuation of their previous work, an efficient HO mechanism for UAV networks was proposed. Since the HO mechanism is accomplished in 3D rather than 2D, the network services of UAVs differ from traditional networks [79]. | It used RSS as the key point, but in practice, the RSS value may vary with LoS and NLoS, thus another metric, such as SINR, should be considered. |
| 5 | Mangina et al. | A system that combines an unmanned semi–autonomous quad rotor with a VR–based scheme was presented [111]. | Experiments are limited by labs, so the challenge is to use UAVs as a UE to make assistive technology work better in the real world. |
| 6 | Bae | Using UAV telepresence is a powerful tool that many people may take advantage of. Existing robot technologies, on the other hand, are largely for indoor use since their mobility is sometimes difficult and problematic [112]. | It needs additional development to minimize weight and increase power consumption efficiency. Furthermore, the tests must imitate real–world conditions. |
| 7 | Orsino et al. | A simulation was suggested to investigate the implications of HetNets mobility on Device–To–Device (D2D) and UAV–assisted Mission–critical machine–type communications (mcMTC) in 5G [113]. | The heterogeneity of the equipment employed, such as UAVs, Fiber, and masts, causes operational challenges that must be handled by the quickly expanding industrial IoT ecosystem. |
| 8 | Lee et al. | A fuzzy inference method was used to create an intelligent HO scheme for UAVs. The system makes HO decisions via a fuzzy inference process [49]. | Look at approaches to improve the functions of the HO decision for a variety of devices, including both UAV scenarios as fly BS and UE. |
| 9 | Peng et al. | A cutting–edge machine learning method was offered to address the issues arising from UAV network requirements [75]. | Unsupervised learning from raw data is a time–consuming procedure. |
| 10 | Sharma et al. | The Ultra–Dense Cloud–UAV Network architecture (UDCUN) was suggested [114]. | A small coverage area means two cells may overlap, causing co–channel interference. More users near user–site APs make HO regulation difficult without too much communication expense and latency. |
| 11 | Yoo et al. | The UAV Delivery Using Autonomous Mobility (UDAM) idea was presented for delivery services. Nowadays, people use E–commerce for nearly everything [105]. | Limited evaluators from limited companies evaluated the proposal, limiting the research’s scope. No existing notions were compared numerically. |
| 12 | Hu et al. | A deep learning–based system for trajectory prediction and an intelligent HO control approach was presented for UAV cellular networks [115]. | Deep learning’s predictive power demonstrates its future utility. However, various challenges must be addressed, including spectrum, energy, and security management. |
| 13 | Nithin | A location module was built to improve Over–The–Top (OTT) application location services [116]. | Advanced machine learning could enable address discovery, navigation, and product delivery in the future. |
| 14 | Guan et al. | The use of mm–waves and Terahertz (THz) band communications in UAV networks were examined where the transmitter and receiver are both mobile [117] | Beam alignment frequency and directivity angle control in mm–wave/THz bands for studying mobility and weather conditions can be future research topics. |
| 15 | Euler et al. | The effects of changing radio environments and complications regarding UAV performance were analyzed [104]. | To improve the results, future studies may explore avoiding low SNR sites and using directional antennas for the UEs. |
| 16 | Banagar et al. | A stochastic geometry–based UAV cellular network model was assessed. Lately, UBSs have been receiving significant attention due to their versatility and wide–ranging applications [118]. | Future work will focus on the mathematical analysis of complex mobility models like Random Waypoint (RWP) and Random Walk (RW). |
| 17 | Fakhreddine et al. | An experiment in a suburban setting was proposed to see how parameters influence cell selection and HO management when UAVs are employed as aerial UEs [85]. | Connecting a UAV to a cell–based solely on the RSRP value and ignoring other key point values like SINR. |
| 18 | Banagar et al. | For UBS networks, a stochastic geometry–based mobility model was developed. The mobility of wireless nodes has a significant impact on the performance of wireless networks [76]. | The flying BS that served ground UE was restricted to a constant height. A dynamic height may be proposed in the future to reflect the real 3D movement of UAVs. |
| 19 | Iranmanesh et al. | A Delay–Tolerant Network (DTN) technique was suggested for UAV communication packet routing optimization [83]. | The work discussed UAV issues and offered graphics to illustrate the conclusions while employing a unique packet–based technique. However, future improvements to this algorithm or others are possible. |
| 20 | Bai et al. | A new approach (dubbed the route–aware HO algorithm) was suggested to improve UAV communication system reliability [119]. | Improved estimation accuracy and granularity in presenting radio link quality can improve the findings even further. |
| 21 | Amer et al. | The probability of coverage and the impact of various parameters on the overall performance of the proposed system were examined [120]. | Although main and secondary lobes are used to evaluate antenna layouts, side lobes and nulls have an impact on UAV–UE cell allocation and HO in practice. |
| 22 | Azari et al. | A machine learning–based technique was recommended for the HO mechanism and resource management of cellular–connected UAVs. When aerial and terrestrial users coexist in cellular networks, UAVs create significant interference to BSs, posing difficulty for terrestrial users’ UL communication service [84]. | More DL work is needed to make this study’s results relevant in the future. |
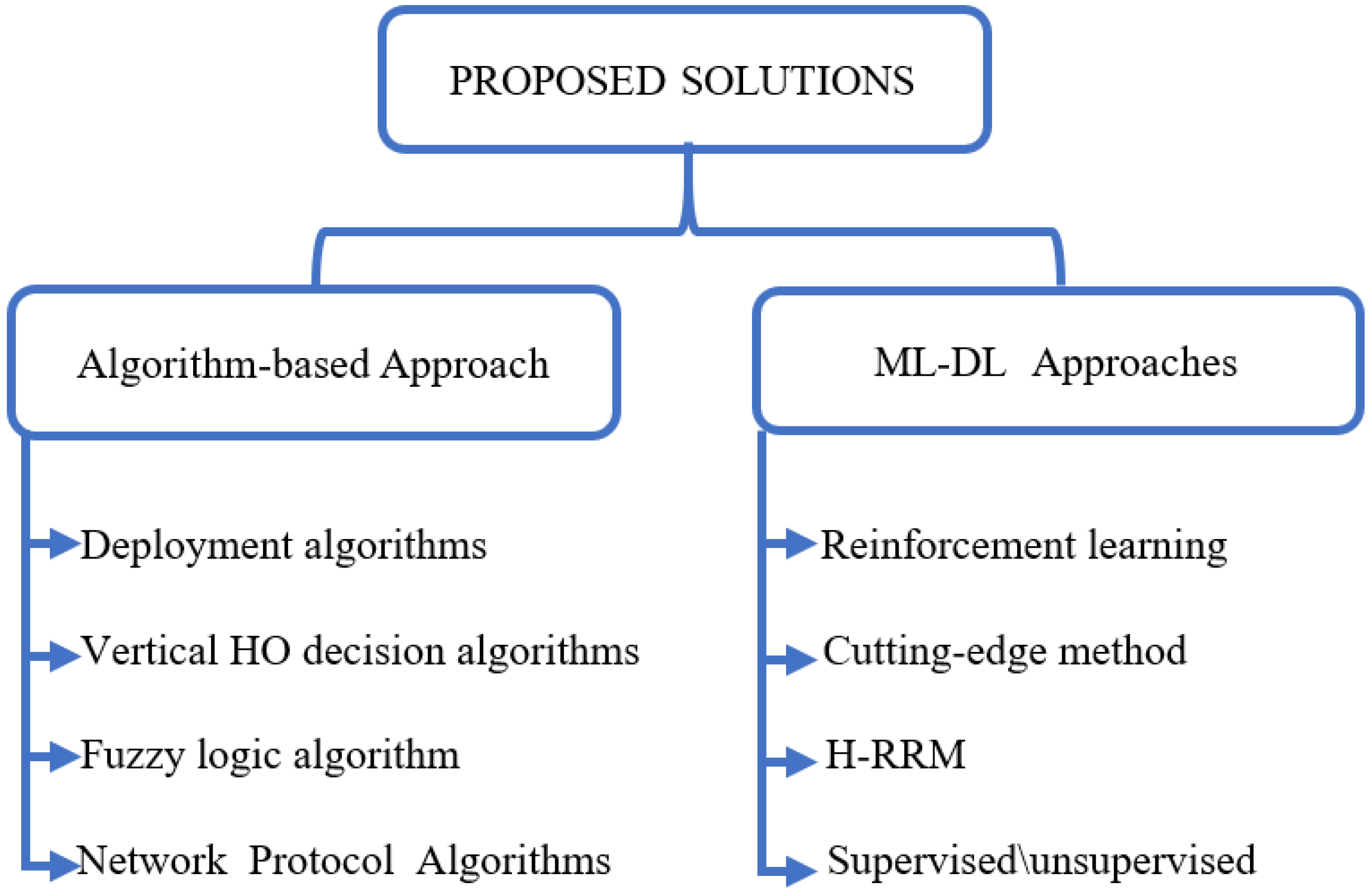
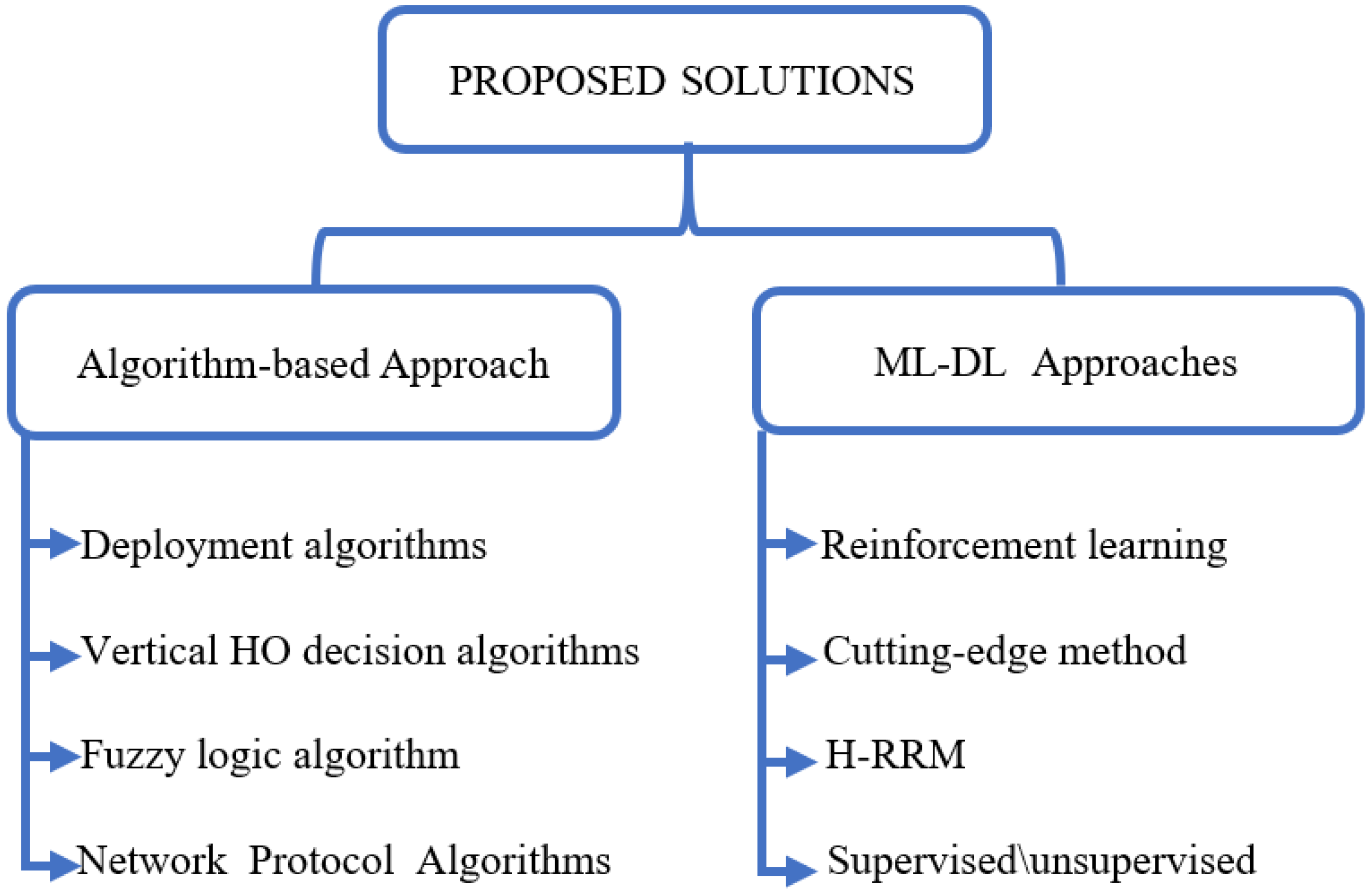
6. Proposed Solutions
6.1. RSS–Based Algorithms
6.2. Route–Aware HO Algorithm
6.3. Delay–Tolerant Networking (DTN) Algorithm
6.4. Machine/Deep Learning Approaches
7. Future Research Directions
7.1. Mobility Management
7.2. Energy Charging Efficiency
7.3. UAV–to–UAV and Satellite–to–UAV Communication
7.4. Interaction between Different Segments
7.5. Massive MIMO
7.6. Synergy of UAVs and IoT Systems
7.7. Full Duplex Communication
7.8. Security and Privacy
8. Conclusions
Funding
Acknowledgments
Conflicts of Interest
Abbreviations
| 2D | Two Dimensional |
| 3D | Three Dimensional |
| 4G | 4th Generation |
| 5G | 5th Generation |
| 6G | 6th Generation |
| AP | Access Point |
| API | Application Programing Interface |
| BS | Base Station |
| BVLoS | Beyond Visual Line of Sight |
| D2D | Device–To–Device |
| DTN | Delay Tolerant Networking |
| FAA | Federal Aviation Administration |
| GPS | Global Positioning System |
| HetNets | Heterogeneous Networks |
| HO | Handover |
| H–RRM | HO and Radio Resource Management |
| ICIC | Inter–Cell Interference Coordination |
| LC | Loaded Cells |
| LoS | Line of Sight |
| UDCUN | Ultra–Dense Cloud–UAV Network |
| UDN | Ultra–Dense Networks |
| UE | User Equipment |
| UL | Uplink |
| UxNB | UAV–Mounted Bs |
| LTE | Long Term Evolution |
| LWA | Leaky–Wave Antenna |
| mcMTC | Mission–Critical Machine–Type Communication |
| MIMO | Multiple Input Multiple Output |
| mm–wave | Millimeter Waves |
| OTT | Over–The–Top |
| Pf | False Ho Initiation Probability |
| Ps | Seamless Ho Success Probability |
| QoS | Quality of Service |
| RLF | Radio Link Failure |
| eNB | evolved Node BS |
| UAV | Unmanned Aerial Vehicle |
| RSS | Received Signal Strength |
| SDN | Software–Defined Networking |
| SINR | Signal–To–Interference–Plus–Noise Ratio |
| SWAP | Size, Weight, And Power |
| THz | Terahertz |
| TCP/IP | Transmission Control Protocol/Internet Protocol |
| FANET | Flying Ad–Hoc Network |
| VR | Virtual Reality |
| WLAN | Wireless Local Area Network |
| RWP | Random Waypoint |
| WWAN | Wireless Wide Area Network |
| RW | Random Walk |
References
- Henry, P.S.; Luo, H. WiFi: What’s next? IEEE Commun. Mag. 2002, 40, 66–72. [Google Scholar] [CrossRef]
- Sandhu, S.S.D.M.K. A Review Over Existing Handover Decision Systems For Drones In Wireless Network. Int. J. Sci. Technol. Res. 2020, 9, 5. [Google Scholar]
- Laghari, A.A.; Wu, K.; Laghari, R.A.; Ali, M.; Khan, A.A. A review and state of art of Internet of Things (IoT). Arch. Comput. Methods Eng. 2021, 29, 1395–1413. [Google Scholar] [CrossRef]
- Waqas, M.; Kumar, K.; Laghari, A.A.; Saeed, U.; Rind, M.M.; Shaikh, A.A.; Hussain, F.; Rai, A.; Qazi, A.Q. Botnet attack detection in Internet of Things devices over cloud environment via machine learning. Concurr. Comput. Pract. Exp. 2022, 34, e6662. [Google Scholar] [CrossRef]
- Mohsan, S.A.H.; Khan, M.A.; Alsharif, M.H.; Uthansakul, P.; Solyman, A.A.A. Intelligent Reflecting Surfaces Assisted UAV Communications for Massive Networks: Current Trends, Challenges, and Research Directions. Sensors 2022, 22, 5278. [Google Scholar] [CrossRef] [PubMed]
- Alibakhshi Kenari, M. Design and modeling of new UWB metamaterial planar cavity antennas with shrinking of the physical size for modern transceivers. Int. J. Antennas Propag. 2013, 2013, 1–12. [Google Scholar] [CrossRef]
- Alibakhshi-Kenari, M.; Andújar, A.; Anguera, J. New compact printed leaky-wave antenna with beam steering. Microw. Opt. Technol. Lett. 2016, 58, 215–217. [Google Scholar] [CrossRef]
- Alibakhshikenari, M.; Virdee, B.S.; See, C.H.; Abd-Alhameed, R.A.; Falcone, F.; Limiti, E. Super-wide impedance bandwidth planar antenna for microwave and millimeter-wave applications. Sensors 2019, 19, 2306. [Google Scholar] [CrossRef] [PubMed]
- Alibakhshi-Kenari, M.; Naser-Moghadasi, M.; Sadeghzadeh, R.A.; Virdee, B.S.; Limiti, E. New CRLH-based planar slotted antennas with helical inductors for wireless communication systems, RF-circuits and microwave devices at UHF–SHF bands. Wirel. Pers. Commun. 2017, 92, 1029–1038. [Google Scholar] [CrossRef]
- Alibakhshikenari, M.; Virdee, B.S.; Althuwayb, A.A.; Aïssa, S.; See, C.H.; Abd-Alhameed, R.A.; Falcone, F.; Limiti, E. Study on on-chip antenna design based on metamaterial-inspired and substrate-integrated waveguide properties for millimetre-wave and THz integrated-circuit applications. J. Infrared Millim. Terahertz Waves 2021, 42, 17–28. [Google Scholar] [CrossRef]
- Alibakhshi-Kenari, M.; Movahhedi, M.; Naderian, H. A new miniature ultra wide band planar microstrip antenna based on the metamaterial transmission line. In Proceedings of the 2012 IEEE Asia-Pacific Conference on Applied Electromagnetics (APACE), Melaka, Malaysia, 11–13 December 2012; pp. 293–297. [Google Scholar]
- Alibakhshikenari, M.; Virdee, B.S.; Shukla, P.; Parchin, N.O.; Azpilicueta, L.; See, C.H.; Abd-Alhameed, R.A.; Falcone, F.; Huynen, I.; Denidni, T.A. Metamaterial-inspired antenna array for application in microwave breast imaging systems for tumor detection. IEEE Access 2020, 8, 174667–174678. [Google Scholar] [CrossRef]
- Alibakhshikenari, M.; Virdee, B.S.; Limiti, E. Study on isolation and radiation behaviours of a 34× 34 array-antennas based on SIW and metasurface properties for applications in terahertz band over 125–300 GHz. Optik 2020, 206, 163222. [Google Scholar] [CrossRef]
- Alibakhshikenari, M.; Virdee, B.S.; See, C.H.; Abd-Alhameed, R.A.; Falcone, F.; Limiti, E. Surface wave reduction in antenna arrays using metasurface inclusion for MIMO and SAR systems. Radio Sci. 2019, 54, 1067–1075. [Google Scholar] [CrossRef]
- Dicandia, F.A.; Fonseca, N.J.G.; Bacco, M.; Mugnaini, S.; Genovesi, S. Space-Air-Ground Integrated 6G Wireless Communication Networks: A Review of Antenna Technologies and Application Scenarios. Sensors 2022, 22, 3136. [Google Scholar] [CrossRef] [PubMed]
- Lum, C.; Gauksheim, K.; Deseure, C.; Vagners, J.; McGeer, T. Assessing and estimating risk of operating unmanned aerial systems in populated areas. In Proceedings of the 11th AIAA Aviation Technology, Integration, and Operations (ATIO) Conference, including the AIAA Balloon Systems Conference and 19th AIAA Lighter-Than, Virginia Beach, VA, USA, 20–22 September 2011; p. 6918. [Google Scholar]
- Kardasz, P.; Doskocz, J.; Hejduk, M.; Wiejkut, P.; Zarzycki, H. Drones and possibilities of their using. J. Civ. Environ. Eng. 2016, 6, 1–7. [Google Scholar] [CrossRef]
- Usman, M.A.; Philip, N.Y.; Politis, C. 5G enabled mobile healthcare for ambulances. In Proceedings of the 2019 IEEE Globecom Workshops (GC Wkshps), Waikoloa, HI, USA, 9–13 December 2019; pp. 1–6. [Google Scholar]
- Abubakar, A.I.; Omeke, K.G.; Öztürk, M.; Hussain, S.; Imran, M.A. The role of artificial intelligence driven 5G networks in COVID-19 outbreak: Opportunities, challenges, and future outlook. Front. Commun. Netw. 2020, 1, 575065. [Google Scholar] [CrossRef]
- Andrews, J.G.; Buzzi, S.; Choi, W.; Hanly, S.V.; Lozano, A.; Soong, A.C.K.; Zhang, J.C. What will 5G be? IEEE J. Sel. Areas Commun. 2014, 32, 1065–1082. [Google Scholar] [CrossRef]
- Maps., C.C. Cellular Coverage Maps. Available online: https://www.fleetistics.com/resources/misc-fleet-management/cellular-network-coverage-maps (accessed on 17 June 2020).
- Li, B.; Fei, Z.; Zhang, Y. UAV communications for 5G and beyond: Recent advances and future trends. IEEE Internet Things J. 2018, 6, 2241–2263. [Google Scholar] [CrossRef]
- Zeng, Y.; Zhang, R.; Lim, T.J. Wireless communications with unmanned aerial vehicles: Opportunities and challenges. IEEE Commun. Mag. 2016, 54, 36–42. [Google Scholar] [CrossRef]
- Wu, H.; Tao, X.; Zhang, N.; Shen, X. Cooperative UAV cluster-assisted terrestrial cellular networks for ubiquitous coverage. IEEE J. Sel. Areas Commun. 2018, 36, 2045–2058. [Google Scholar] [CrossRef]
- Zhang, J.; Hu, X.; Ning, Z.; Ngai, E.C.H.; Zhou, L.; Wei, J.; Cheng, J.; Hu, B.; Leung, V.C.M. Joint resource allocation for latency-sensitive services over mobile edge computing networks with caching. IEEE Internet Things J. 2018, 6, 4283–4294. [Google Scholar] [CrossRef]
- Zhang, J.; Zhou, L.; Tang, Q.; Ngai, E.C.H.; Hu, X.; Zhao, H.; Wei, J. Stochastic computation offloading and trajectory scheduling for UAV-assisted mobile edge computing. IEEE Internet Things J. 2018, 6, 3688–3699. [Google Scholar] [CrossRef]
- Gures, E.; Shayea, I.; Alhammadi, A.; Ergen, M.; Mohamad, H. A comprehensive survey on mobility management in 5g heterogeneous networks: Architectures, challenges and solutions. IEEE Access 2020, 8, 195883–195913. [Google Scholar] [CrossRef]
- Kalantari, E.; Yanikomeroglu, H.; Yongacoglu, A. On the number and 3D placement of drone base stations in wireless cellular networks. IEEE Internet Things J. 2018, 6, 3688–3699. [Google Scholar]
- Lyu, J.; Zeng, Y.; Zhang, R.; Lim, T.J. Placement optimization of UAV-mounted mobile base stations. IEEE Commun. Lett. 2016, 21, 604–607. [Google Scholar] [CrossRef]
- Zhao, H.; Wang, H.; Wu, W.; Wei, J. Deployment algorithms for UAV airborne networks toward on-demand coverage. IEEE J. Sel. Areas Commun. 2018, 36, 2015–2031. [Google Scholar] [CrossRef]
- Mozaffari, M.; Saad, W.; Bennis, M.; Debbah, M. Efficient deployment of multiple unmanned aerial vehicles for optimal wireless coverage. IEEE Commun. Lett. 2016, 20, 1647–1650. [Google Scholar] [CrossRef]
- Sharma, V.; Bennis, M.; Kumar, R. UAV-assisted heterogeneous networks for capacity enhancement. IEEE Commun. Lett. 2016, 20, 1207–1210. [Google Scholar] [CrossRef]
- Savkin, A.V.; Huang, H. Deployment of unmanned aerial vehicle base stations for optimal quality of coverage. IEEE Wirel. Commun. Lett. 2018, 8, 321–324. [Google Scholar] [CrossRef]
- Chen, M.; Mozaffari, M.; Saad, W.; Yin, C.; Debbah, M.; Hong, C.S. Caching in the sky: Proactive deployment of cache-enabled unmanned aerial vehicles for optimized quality-of-experience. IEEE J. Sel. Areas Commun. 2017, 35, 1046–1061. [Google Scholar] [CrossRef]
- Yan, X.; Şekercioğlu, Y.A.; Narayanan, S. A survey of vertical handover decision algorithms in Fourth Generation heterogeneous wireless networks. Comput. Netw. 2010, 54, 1848–1863. [Google Scholar] [CrossRef]
- 3GPP TR 36.777. Enhanced LTE Support for Aerial Vehicles; 3GPP: Sophia Antipolis, France, 2017. [Google Scholar]
- Zeng, Y.; Lyu, J.; Zhang, R. Cellular-connected UAV: Potential, challenges, and promising technologies. IEEE Wirel. Commun. 2018, 26, 120–127. [Google Scholar] [CrossRef]
- Cabrera-Castellanos, D.F.; Aragón-Zavala, A.; Castañón-Ávila, G. Closing Connectivity Gap: An Overview of Mobile Coverage Solutions for Not-Spots in Rural Zones. Sensors 2021, 21, 8037. [Google Scholar] [CrossRef] [PubMed]
- Alibakhshikenari, M.; Virdee, B.S.; Azpilicueta, L.; Naser-Moghadasi, M.; Akinsolu, M.O.; See, C.H.; Liu, B.; Abd-Alhameed, R.A.; Falcone, F.; Huynen, I. A comprehensive survey of “metamaterial transmission-line based antennas: Design, challenges, and applications”. IEEE Access 2020, 8, 144778–144808. [Google Scholar] [CrossRef]
- Nadeem, I.; Alibakhshikenari, M.; Babaeian, F.; Althuwayb, A.; Virdee, B.S.; Azpilicueta, L.; Khan, S.; Huynen, I.; Falcone, F.J.; Denidni, T.A. A comprehensive survey on" Circular Polarized Antennas" for existing and emerging wireless communication technologies. J. Phys. D Appl. Phys. 2021, 55, 033002. [Google Scholar] [CrossRef]
- Alibakhshikenari, M.; Ali, E.M.; Soruri, M.; Dalarsson, M.; Naser-Moghadasi, M.; Virdee, B.S.; Stefanovic, C.; Pietrenko-Dabrowska, A.; Koziel, S.; Szczepanski, S. A comprehensive survey on antennas on-chip based on metamaterial, metasurface, and substrate integrated waveguide principles for millimeter-waves and terahertz integrated circuits and systems. IEEE Access 2022, 10, 3668–3692. [Google Scholar] [CrossRef]
- Alibakhshikenari, M.; Babaeian, F.; Virdee, B.S.; Aïssa, S.; Azpilicueta, L.; See, C.H.; Althuwayb, A.A.; Huynen, I.; Abd-Alhameed, R.A.; Falcone, F. A comprehensive survey on “Various decoupling mechanisms with focus on metamaterial and metasurface principles applicable to SAR and MIMO antenna systems”. IEEE Access 2020, 8, 192965–193004. [Google Scholar] [CrossRef]
- Alibakhshikenari, M.; Moghaddam, S.M.; Zaman, A.U.; Yang, J.; Virdee, B.S.; Limiti, E. Wideband sub-6 GHz self-grounded bow-tie antenna with new feeding mechanism for 5G communication systems. In Proceedings of the 2019 13th European Conference on Antennas and Propagation (EuCAP), Krakow, Poland, 31 March–5 April 2019; pp. 1–4. [Google Scholar]
- Guillen-Perez, A.; Cano, M.-D. Flying ad hoc networks: A new domain for network communications. Sensors 2018, 18, 3571. [Google Scholar] [CrossRef] [PubMed]
- Shayea, I.; Ergen, M.; Azmi, M.H.; Çolak, S.A.; Nordin, R.; Daradkeh, Y.I. Key Challenges, Drivers and Solutions for Mobility Management in 5G Networks: A Survey. IEEE Access 2020, 8, 172534–172552. [Google Scholar] [CrossRef]
- Shayea, I.; Ismail, M.; Nordin, R.; Ergen, M.; Ahmad, N.; Abdullah, N.F.; Alhammadi, A.; Mohamad, H. New weight function for adapting handover margin level over contiguous carrier aggregation deployment scenarios in LTE-advanced system. Wirel. Pers. Commun. 2019, 108, 1179–1199. [Google Scholar] [CrossRef]
- Angjo, J.; Shayea, I.; Ergen, M.; Mohamad, H.; Alhammadi, A.; Daradkeh, Y.I. Handover Management of Drones in Future Mobile Networks: 6G Technologies. IEEE Access 2021, 9, 12803–12823. [Google Scholar] [CrossRef]
- Garg, V. Wireless Communications & Networking; Elsevier: Amsterdam, The Netherlands, 2010. [Google Scholar]
- Lee, E.; Choi, C.; Kim, P. Intelligent handover scheme for drone using fuzzy inference systems. IEEE Access 2017, 5, 13712–13719. [Google Scholar] [CrossRef]
- Su, S.-L.; Chih, T.-H.; Wu, S.-B. A Novel Handover Process for Mobility Load Balancing in LTE Heterogeneous Networks. In Proceedings of the 2019 IEEE International Conference on Industrial Cyber Physical Systems (ICPS), Taipei, Taiwan, 6–9 May 2019; pp. 41–46. [Google Scholar]
- Khan, M.; Han, K. An optimized network selection and handover triggering scheme for heterogeneous self-organized wireless networks. Math. Probl. Eng. 2014, 2014, 173068. [Google Scholar] [CrossRef]
- Guo, W.; Devine, C.; Wang, S. Performance analysis of micro unmanned airborne communication relays for cellular networks. In Proceedings of the 2014 9th international symposium on communication systems, networks & digital sign (CSNDSP), Manchester, UK, 23–25 July 2014; pp. 658–663. [Google Scholar]
- Gupta, L.; Jain, R.; Vaszkun, G. Survey of important issues in UAV communication networks. IEEE Commun. Surv. Tutor. 2015, 18, 1123–1152. [Google Scholar] [CrossRef]
- Sharma, V.; Song, F.; You, I.; Chao, H.-C. Efficient management and fast handovers in software defined wireless networks using UAVs. IEEE Netw. 2017, 31, 78–85. [Google Scholar] [CrossRef]
- Sharma, P.K.; Kim, D.I. Coverage probability of 3-D mobile UAV networks. IEEE Wirel. Commun. Lett. 2018, 8, 97–100. [Google Scholar] [CrossRef]
- Daovan, H.; Evolved Universal Terrestrial Radio Access (E-UTRA). User Equipment (UE) Radio Transmission and Reception; European Telecommunications Standards Institute: Valbonne, France, 2011. [Google Scholar]
- Kim, Y.; Lee, H.-Y.; Hwang, P.; Patro, R.K.; Lee, J.; Roh, W.; Cheun, K. Feasibility of mobile cellular communications at millimeter wave frequency. IEEE J. Sel. Top. Signal Processing 2016, 10, 589–599. [Google Scholar] [CrossRef]
- Niu, Y.; Li, Y.; Jin, D.; Su, L.; Vasilakos, A.V. A survey of millimeter wave communications (mmWave) for 5G: Opportunities and challenges. Wirel. Netw. 2015, 21, 2657–2676. [Google Scholar] [CrossRef]
- Jang, Y.; Raza, S.M.; Kim, M.; Choo, H. Proactive Handover Decision for UAVs with Deep Reinforcement Learning. Sensors 2022, 22, 1200. [Google Scholar] [CrossRef] [PubMed]
- Lee, W.; Jeon, Y.; Kim, T.; Kim, Y.-I. Deep Reinforcement Learning for UAV Trajectory Design Considering Mobile Ground Users. Sensors 2021, 21, 8239. [Google Scholar] [CrossRef]
- Wang, T.; Wang, S.; Zhou, Z.-H. Machine learning for 5G and beyond: From model-based to data-driven mobile wireless networks. China Commun. 2019, 16, 165–175. [Google Scholar]
- Tabassum, H.; Salehi, M.; Hossain, E. Fundamentals of mobility-aware performance characterization of cellular networks: A tutorial. IEEE Commun. Surv. Tutor. 2019, 21, 2288–2308. [Google Scholar] [CrossRef]
- Hussain, F.; Hassan, S.A.; Hussain, R.; Hossain, E. Machine learning for resource management in cellular and IoT networks: Potentials, current solutions, and open challenges. IEEE Commun. Surv. Tutor. 2020, 22, 1251–1275. [Google Scholar] [CrossRef]
- Ullah, H.; Nair, N.G.; Moore, A.; Nugent, C.; Muschamp, P.; Cuevas, M. 5G communication: An overview of vehicle-to-everything, drones, and healthcare use-cases. IEEE Access 2019, 7, 37251–37268. [Google Scholar] [CrossRef]
- Zhang, Y.; Qiu, H. DDQN with Prioritized Experience Replay-Based Optimized Geographical Routing Protocol of Considering Link Stability and Energy Prediction for UANET. Sensors 2022, 22, 5020. [Google Scholar] [CrossRef] [PubMed]
- Parvaresh, N.; Kulhandjian, M.; Kulhandjian, H.; D’Amours, C.; Kantarci, B. A tutorial on AI-powered 3D deployment of drone base stations: State of the art, applications and challenges. Veh. Commun. 2022, 36, 100474. [Google Scholar] [CrossRef]
- Shi, W.; Zhou, H.; Li, J.; Xu, W.; Zhang, N.; Shen, X. Drone assisted vehicular networks: Architecture, challenges and opportunities. IEEE Netw. 2018, 32, 130–137. [Google Scholar] [CrossRef]
- Saym, M.M.; Mahbub, M.; Ahmed, F. Coverage Maximization by Optimal Positioning and Transmission Planning for UAV-Assisted Wireless Communications. In Proceedings of the 2021 International Conference on Science & Contemporary Technologies (ICSCT), Dhaka, Bangladesh, 5–7 August 2021; pp. 1–4. [Google Scholar]
- Pliatsios, D.; Goudos, S.K.; Lagkas, T.; Argyriou, V.; Boulogeorgos, A.-A.A.; Sarigiannidis, P. Drone-base-station for next-generation Internet-of-Things: A comparison of swarm intelligence approaches. IEEE Open J. Antennas Propag. 2021, 3, 32–47. [Google Scholar] [CrossRef]
- Sekander, S.; Tabassum, H.; Hossain, E. Multi-tier drone architecture for 5G/B5G cellular networks: Challenges, trends, and prospects. IEEE Commun. Mag. 2018, 56, 96–103. [Google Scholar] [CrossRef]
- Amponis, G.; Lagkas, T.; Zevgara, M.; Katsikas, G.; Xirofotos, T.; Moscholios, I.; Sarigiannidis, P. Drones in B5G/6G Networks as Flying Base Stations. Drones 2022, 6, 39. [Google Scholar] [CrossRef]
- Nemer, I.A.; Sheltami, T.R.; Belhaiza, S.; Mahmoud, A.S. Energy-Efficient UAV Movement Control for Fair Communication Coverage: A Deep Reinforcement Learning Approach. Sensors 2022, 22, 1919. [Google Scholar] [CrossRef] [PubMed]
- Mozaffari, M.; Kasgari, A.T.Z.; Saad, W.; Bennis, M.; Debbah, M. 3D cellular network architecture with drones for beyond 5G. In Proceedings of the 2018 IEEE Global Communications Conference (GLOBECOM), Abu Dhabi, United Arab Emirates, 9–13 December 2018; pp. 1–6. [Google Scholar]
- Xu, X.; Zeng, Y. Cellular-connected UAV: Performance analysis with 3D antenna modelling. In Proceedings of the 2019 IEEE International Conference on Communications Workshops (ICC Workshops), Shanghai, China, 20–24 May 2019; pp. 1–6. [Google Scholar]
- Peng, H.; Razi, A.; Afghah, F.; Ashdown, J. A unified framework for joint mobility prediction and object profiling of drones in UAV networks. J. Commun. Netw. 2018, 20, 434–442. [Google Scholar] [CrossRef]
- Banagar, M.; Dhillon, H.S. Fundamentals of Drone Cellular Network Analysis under Random Waypoint Mobility Model. arXiv 2019, arXiv:1908.09064. [Google Scholar]
- Karanjekar, H.; Agrawal, A. Review on vertical handover techniques among heterogeneous networks. Int. J. Adv. Netw. Appl. 2014, 5, 2066. [Google Scholar]
- Park, K.-N.; Cho, B.-M.; Park, K.-J.; Kim, H. Optimal coverage control for net-drone handover. In Proceedings of the 2015 Seventh International Conference on Ubiquitous and Future Networks, Sapporo, Japan, 7–10 July 2015; pp. 97–99. [Google Scholar]
- Iot, B. Handover Management of Net-Drones for Future Internet Platforms. Int. J. Distrib. Sens. Netw 2016, 2016, 7. [Google Scholar]
- Yang, P.; Cao, X.; Yin, C.; Xiao, Z.; Xi, X.; Wu, D. Routing protocol design for drone-cell communication networks. In Proceedings of the 2017 IEEE International Conference on Communications (ICC), Paris, France, 21–25 May 2017; pp. 1–6. [Google Scholar]
- Basagni, S.; Chlamtac, I.; Syrotiuk, V.R.; Woodward, B.A. A Distance Routing Effect Algorithm for Mobility (DREAM); ACM: Dallas, TX, USA, 1998; pp. 76–84. [Google Scholar]
- Alshbatat, A.I.; Dong, L. Adaptive MAC protocol for UAV communication networks using directional antennas. In Proceedings of the 2010 International Conference on Networking, Sensing and Control (ICNSC), Chicago, IL, USA, 10–12 April 2010; pp. 598–603. [Google Scholar]
- Iranmanesh, S.; Raad, R.; Raheel, M.S.; Tubbal, F.; Jan, T. Novel DTN mobility-driven routing in autonomous drone Logistics networks. IEEE Access 2019, 8, 13661–13673. [Google Scholar] [CrossRef]
- Azari, A.; Ghavimi, F.; Ozger, M.; Jantti, R.; Cavdar, C. Machine learning assisted handover and resource management for cellular connected drones. arXiv 2020, arXiv:2001.07937. [Google Scholar]
- Fakhreddine, A.; Bettstetter, C.; Hayat, S.; Muzaffar, R.; Emini, D. Handover challenges for cellular-connected drones. In Proceedings of the 5th Workshop on Micro Aerial Vehicle Networks, Systems, and Applications, Seoul, Korea, 21 June 2019; pp. 9–14. [Google Scholar]
- Driouache; Saida; Naja, N.; Jamali, A. Fuzzy logic based intelligent vertical handover decision in heterogeneous networks. In International Conference on Artificial Intelligence & Industrial Applications; Springer: Cham, Switzerland, 2020. [Google Scholar]
- Zhang, W. Handover decision using fuzzy MADM in heterogeneous networks. In Proceedings of the 2004 IEEE Wireless Communications and Networking Conference, Atlanta, GA, USA, 21–25 March 2004; pp. 653–658. [Google Scholar]
- Vikas, M.N.; Keshava, K.N.; Prabhas, R.K.; Shanavas, H. Efficient Hand off using Fuzzy and Simulated Annealing. Int. J. Comput. Netw. Inf. Secur. 2012, 4, 17. [Google Scholar]
- Akyildiz, I.F.; Xie, J.; Mohanty, S. A survey of mobility management in next-generation all-IP-based wireless systems. IEEE Wirel. Commun. 2004, 11, 16–28. [Google Scholar] [CrossRef]
- Sharma, M.; Khola, R.K. Fuzzy logic based handover decision system. Int. J. Ad Hoc Sens. Ubiquitous Comput. 2012, 3, 21. [Google Scholar] [CrossRef]
- Israt, P.; Chakma, N.; Hashem, M.M.A. A fuzzy logic-based adaptive handoff management protocol for next-generation wireless systems. In Proceedings of the 2008 11th International Conference on Computer and Information Technology, Khulna, Bangladesh, 24–27 December 2008; pp. 288–293. [Google Scholar]
- Gill, H.; Baghla, S. A New Fuzzy Simulation Model for Vertical Handoff in Heterogeneous Networks. SSRG Int. J. Electron. Commun. Eng. (SSRG-IJECE) 2014, 1, 24–29. [Google Scholar]
- Gyekye, Y.N.; Agbinya, J.I. Vertical Handoff Decision Algorithm Using Fuzzy Logic. In International conference on Wireless Broadband and Ultra Wideband Communication; UTS ePress: Ultimo, Australia, 2006. [Google Scholar]
- Sadiq, A.S.; Bakar, K.A.; Ghafoor, K.Z. A Fuzzy Logic Approach for Reducing Handover Latency in Wireless Networks. Netw. Protoc. Algorithms 2010, 2, 61–87. [Google Scholar]
- Islam, M.T.; Hossain, M.L.; Kabir, M.A.; Rahman, M.T.; Salekin, S.; Alam, S.S.; Mitul, A.F. Vertical handover decision using fuzzy logic in a heterogeneous environment. In Proceedings of the 2013 International Conference on Informatics, Electronics and Vision (ICIEV), Dhaka, Bangladesh, 17–18 May 2013; pp. 1–3. [Google Scholar]
- Coqueiro, T.; Jailton, J.; Carvalho, T.; Francês, R. A fuzzy logic system for vertical handover and maximizing battery lifetime in heterogeneous wireless multimedia networks. Wirel. Commun. Mob. Comput. 2019, 2019, 1–13. [Google Scholar] [CrossRef]
- Agarwal, Y.; Agarwal, A.; Mehrotra, P.; Pradhan, T. Vertical Handoff Technique between Wifi and Wimax using Fuzzy Comprehensive. Int. J. Inf. Comput. Technol. 2014, 4, 649–654. [Google Scholar]
- Stanczak, J.; Kovacs, I.Z.; Koziol, D.; Wigard, J.; Amorim, R.; Nguyen, H. Mobility challenges for unmanned aerial vehicles connected to cellular LTE networks. In Proceedings of the 2018 IEEE 87th Vehicular Technology Conference (VTC Spring), Porto, Portugal, 3–6 June 2018; pp. 1–5. [Google Scholar]
- Lin, X.; Yajnanarayana, V.; Muruganathan, S.D.; Gao, S.; Asplund, H.; Maattanen, H.-L.; Bergstrom, M.; Euler, S.; Wang, Y.P.E. The sky is not the limit: LTE for unmanned aerial vehicles. IEEE Commun. Mag. 2018, 56, 204–210. [Google Scholar] [CrossRef]
- Jia, X.; Wu, Z.L.; Guan, H. The target vehicle movement state estimation method with radar based on kalman filtering algorithm. Applied Mechanics and Materials 2013, 347–350, 638–642. [Google Scholar] [CrossRef]
- Darouach, M.; Zasadzinski, M.; Onana, A.B.; Nowakowski, S. Kalman filtering with unknown inputs via optimal state estimation of singular systems. Int. J. Syst. Sci. 1995, 26, 2015–2028. [Google Scholar] [CrossRef]
- Azari, M.M.; Rosas, F.; Pollin, S. Cellular connectivity for UAVs: Network modeling, performance analysis, and design guidelines. IEEE Trans. Wirel. Commun. 2019, 18, 3366–3381. [Google Scholar] [CrossRef]
- Colpaert, A.; Vinogradov, E.; Pollin, S. Aerial coverage analysis of cellular systems at LTE and mmwave frequencies using 3D city models. Sensors 2018, 18, 4311. [Google Scholar] [CrossRef]
- Euler, S.; Maattanen, H.-L.; Lin, X.; Zou, Z.; Bergström, M.; Sedin, J. Mobility support for cellular connected unmanned aerial vehicles: Performance and analysis. In Proceedings of the 2019 IEEE Wireless Communications and Networking Conference (WCNC), Marrakesh, Morocco, 15–18 April 2019; pp. 1–6. [Google Scholar]
- Yoo, H.D.; Chankov, S.M. Drone-delivery using autonomous mobility: An innovative approach to future last-mile delivery problems. In Proceedings of the 2018 IEEE international conference on industrial engineering and engineering management (ieem), Bangkok, Thailand, 16–19 December 2018; pp. 1216–1220. [Google Scholar]
- Muzaffar, R.; Raffelsberger, C.; Fakhreddine, A.; Luque, J.L.; Emini, D.; Bettstetter, C. First experiments with a 5G-Connected drone. In Proceedings of the 6th ACM Workshop on Micro Aerial Vehicle Networks, Systems, and Applications, Toronto, ON, Canada, 19 June 2020; pp. 1–5. [Google Scholar]
- Izydorczyk, T.; Berardinelli, G.; Mogensen, P.; Ginard, M.M.; Wigard, J.; Kovacs, I.Z. Achieving high UAV uplink throughput by using beamforming on board. IEEE Access 2020, 8, 82528–82538. [Google Scholar] [CrossRef]
- Garcia-Rodriguez, A.; Geraci, G.; López-Pérez, D.; Giordano, L.G.; Ding, M.; Bjornson, E. The essential guide to realizing 5G-connected UAVs with massive MIMO. IEEE Commun. Mag. 2019, 57, 84–90. [Google Scholar] [CrossRef]
- Huang, Y.; Wu, Q.; Wang, T.; Zhou, G.; Zhang, R. 3D beam tracking for cellular-connected UAV. IEEE Wirel. Commun. Lett. 2020, 9, 736–740. [Google Scholar] [CrossRef]
- Chen, Y.; Lin, X.; Khan, T.A.; Mozaffari, M. A Deep Reinforcement Learning Approach to Efficient Drone Mobility Support. arXiv 2020, arXiv:2005.05229. [Google Scholar]
- Mangina, E.; O’Keeffe, E.; Eyerman, J.; Goodman, L. Drones for live streaming of visuals for people with limited mobility. In Proceedings of the 2016 22nd International Conference on Virtual System & Multimedia (VSMM), Kuala Lumpur, Malaysia, 17–21 October 2016; pp. 1–6. [Google Scholar]
- Bae, I.-h. Avatar drone: Drone as telepresence platform with 3d mobility. In Proceedings of the 2016 13th International Conference on Ubiquitous Robots and Ambient Intelligence (URAI), Xi’an, China, 19–22 August 2016; pp. 452–453. [Google Scholar]
- Orsino, A.; Ometov, A.; Fodor, G.; Moltchanov, D.; Militano, L.; Andreev, S.; Yilmaz, O.N.; Tirronen, T.; Torsner, J.; Araniti, G. Effects of heterogeneous mobility on D2D-and drone-assisted mission-critical MTC in 5G. IEEE Commun. Mag. 2017, 55, 79–87. [Google Scholar] [CrossRef]
- Sharma, N.; Magarini, M.; Jayakody, D.N.K.; Sharma, V.; Li, J. On-demand ultra-dense cloud drone networks: Opportunities, challenges and benefits. IEEE Commun. Mag. 2018, 56, 85–91. [Google Scholar] [CrossRef]
- Hu, B.; Yang, H.; Wang, L.; Chen, S. A trajectory prediction based intelligent handover control method in UAV cellular networks. China Commun. 2019, 16, 1–14. [Google Scholar]
- Nithin, P.; Shibu, N.S.; Lakshmi, S.S.; Ponnekanti, S. Location Module for 5G Base Station to Support Mobility Management of Drones. In Proceedings of the 2019 International Conference on Communication and Electronics Systems (ICCES), Coimbatore, India, 17–19 July 2019; pp. 1336–1340. [Google Scholar]
- Guan, Z.; Kulkarni, T. On the effects of mobility uncertainties on wireless communications between flying drones in the mmWave/THz bands. In Proceedings of the IEEE INFOCOM 2019-IEEE Conference on Computer Communications Workshops (INFOCOM WKSHPS), Paris, France, 9 April 2019–2 May 2019; pp. 768–773. [Google Scholar]
- Banagar, M.; Dhillon, H.S. 3GPP-inspired stochastic geometry-based mobility model for a drone cellular network. In Proceedings of the 2019 IEEE Global Communications Conference (GLOBECOM), Waikoloa, HI, USA, 9–13 December 2019; pp. 1–6. [Google Scholar]
- Bai, J.; Yeh, S.-p.; Xue, F.; Talwar, S. Route-Aware Handover Enhancement for Drones in Cellular Networks. In Proceedings of the 2019 IEEE Global Communications Conference (GLOBECOM), Waikoloa, HI, USA, 9–13 December 2019; pp. 1–6. [Google Scholar]
- Amer, R.; Saad, W.; Marchetti, N. Mobility in the sky: Performance and mobility analysis for cellular-connected UAVs. IEEE Trans. Commun. 2020, 36, 2128–2138. [Google Scholar] [CrossRef]
- Li, M.; Hong, Y.; Zeng, C.; Song, Y.; Zhang, X. Investigation on the UAV-to-satellite optical communication systems. IEEE J. Sel. Areas Commun. 2018, 36, 2128–2138. [Google Scholar] [CrossRef]
- Alibakhshikenari, M.; Virdee, B.S.; Shukla, P.; See, C.H.; Abd-Alhameed, R.A.; Falcone, F.; Quazzane, K.; Limiti, E. Isolation enhancement of densely packed array antennas with periodic MTM-photonic bandgap for SAR and MIMO systems. IET Microw. Antennas Propag. 2020, 14, 183–188. [Google Scholar] [CrossRef]
- Alibakhshikenari, M.; Khalily, M.; Virdee, B.S.; See, C.H.; Abd-Alhameed, R.A.; Limiti, E. Mutual-coupling isolation using embedded metamaterial EM bandgap decoupling slab for densely packed array antennas. IEEE Access 2019, 7, 51827–51840. [Google Scholar] [CrossRef]
- Alibakhshikenari, M.; Khalily, M.; Virdee, B.S.; See, C.H.; Abd-Alhameed, R.A.; Limiti, E. Mutual coupling suppression between two closely placed microstrip patches using EM-bandgap metamaterial fractal loading. IEEE Access 2019, 7, 23606–23614. [Google Scholar] [CrossRef]
- Alibakhshikenari, M.; Virdee, B.S.; Shukla, P.; See, C.H.; Abd-Alhameed, R.; Khalily, M.; Falcone, F.; Limiti, E. Interaction between closely packed array antenna elements using meta-surface for applications such as MIMO systems and synthetic aperture radars. Radio Sci. 2018, 53, 1368–1381. [Google Scholar] [CrossRef]
- Alibakhshikenari, M.; Virdee, B.S.; Shukla, P.; See, C.H.; Abd-Alhameed, R.; Khalily, M.; Falcone, F.; Limiti, E. Antenna mutual coupling suppression over wideband using embedded periphery slot for antenna arrays. Electronics 2018, 7, 198. [Google Scholar] [CrossRef]
- Hu, T.; Wang, Y.; Ma, B.; Zhang, J. Orbit angular momentum MIMO with mode selection for UAV-assisted A2G networks. Sensors 2020, 20, 2289. [Google Scholar] [CrossRef]
- Arpaio, M.J.; Paolini, G.; Fuschini, F.; Costanzo, A.; Masotti, D. An All-in-One Dual Band Blade Antenna for ADS-B and 5G Communications in UAV Assisted Wireless Networks. Sensors 2021, 21, 5734. [Google Scholar] [CrossRef] [PubMed]
- Yi, W.; Wang, S.; Jin, Y.; Cao, J. Integrated computer vision algorithms and drone scheduling. Commun. Transp. Res. 2021, 1, 100002. [Google Scholar] [CrossRef]
- Samir, M.; Sharafeddine, S.; Assi, C.M.; Nguyen, T.M.; Ghrayeb, A. UAV trajectory planning for data collection from time-constrained IoT devices. IEEE Trans. Wirel. Commun. 2019, 19, 34–46. [Google Scholar] [CrossRef]
- An, Q.; Pan, Y.; Han, H.; Hu, H. Secrecy Capacity Maximization of UAV-Enabled Relaying Systems with 3D Trajectory Design and Resource Allocation. Sensors 2022, 22, 4519. [Google Scholar] [CrossRef] [PubMed]
- Khan, M.A.; Safi, A.; Qureshi, I.M.; Khan, I.U. Flying ad-hoc networks (FANETs): A review of communication architectures, and routing protocols. In Proceedings of the 2017 First International Conference on Latest trends in Electrical Engineering and Computing Technologies (INTELLECT), Karachi, Pakistan, 15–16 November 2017; pp. 1–9. [Google Scholar]

| HO Procedure | Description |
|---|---|
| Source—inter evolved Node BS (eNB) HO | This occurs when the user leaves the coverage area of eNB and enters another area covered by another eNB (within E–UTRAN). |
| User—inter eNB HO | This occurs when the user enters a coverage area managed by eNB to one that is managed by another eNB (within E–UTRAN). |
| Source—Inter RAT HO | This occurs when the user leaves the E–UTRN cell. |
| User—Inter RAT HO | This occurs when the user enters the E–UTRN cell. |
| Source—intra eNB HO | This occurs from one sector to another when the user leaves the sector. |
| User—intra eNB HO | This occurs from one sector to another when the user enters the sector. |
| No | Challenge Group | Summary of Challenges |
|---|---|---|
| 1 | General and main challenges of connected UAVs | Connected UAV technology is used to place unmanned airships in situations where a human pilot cannot be placed due to risks. Maintenance personnel can employ UAS to conduct an initial inspection from the ground, avoiding perilous climbs and reducing casualties. The key concerns here are the risks connected with monitoring airborne applications. Pilot preparation, flight length, weather conditions, and risk constraints are all significant factors to consider. |
| 2 | UAV operations in LTE | LTE technology is well suited to serve air vehicles, particularly at low altitudes, and this provides great potential for the rapid growth in the number of UAVs in use. This, in turn, creates numerous commercial opportunities for modern communications, which consequently requires improvements to LTE networks in the future to readily serve the anticipated rapid growth of aircraft. |
| 3 | Mobility in 3D | Aerial and ground UEs are based on different assumptions. UAVs for network services are different from traditional networks in that they use a 3D model rather than a 2D model. UAVs are incredibly mobile, making control and decision–making difficult. As a result, advanced mobility solutions will be required. |
| 4 | UAV–ground channels | One of the most complex design difficulties in producing cellular–connected UAVs is creating coexisting mechanisms between terrestrial and airborne users. UAV–ground interference management must be installed to achieve this coexistence. The communication channel between the ground BS and UAVs has extremely distinct interruption patterns. The elevation or angle of the UAV influences channel parameters such as shadowing and path loss exponents. These can be used in residential or sub–residential environments, depending on deployment. |
| 5 | Transmission protocols | UAVs can scan and capture data while dropping data packets, according to several patent applications. Transmission Control Protocol/Internet Protocol (TCP/IP) will be insufficient for UAVs. As a result, new methods based on UAV mobility must be devised. |
| 6 | Dominance of LoS | When aerial and terrestrial users work together, UAVs cause considerable BS disturbance. Existing UAV HO experiments have shown to possess several shortcomings. Due to their high mobility, UAVs are frequently susceptible to HOs and the ping–pong effect. |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Alshaibani, W.T.; Shayea, I.; Caglar, R.; Din, J.; Daradkeh, Y.I. Mobility Management of Unmanned Aerial Vehicles in Ultra–Dense Heterogeneous Networks. Sensors 2022, 22, 6013. https://doi.org/10.3390/s22166013
Alshaibani WT, Shayea I, Caglar R, Din J, Daradkeh YI. Mobility Management of Unmanned Aerial Vehicles in Ultra–Dense Heterogeneous Networks. Sensors. 2022; 22(16):6013. https://doi.org/10.3390/s22166013
Chicago/Turabian StyleAlshaibani, W. T., Ibraheem Shayea, Ramazan Caglar, Jafri Din, and Yousef Ibrahim Daradkeh. 2022. "Mobility Management of Unmanned Aerial Vehicles in Ultra–Dense Heterogeneous Networks" Sensors 22, no. 16: 6013. https://doi.org/10.3390/s22166013
APA StyleAlshaibani, W. T., Shayea, I., Caglar, R., Din, J., & Daradkeh, Y. I. (2022). Mobility Management of Unmanned Aerial Vehicles in Ultra–Dense Heterogeneous Networks. Sensors, 22(16), 6013. https://doi.org/10.3390/s22166013