
Dissecting Latency in 360° Video Camera Sensing Systems †

Abstract
:1. Introduction
- We identify the relationship between the three delay metrics and the time consumption breakdown across the system computing tasks (Section 3.2).
- We launch an open research prototype Zeus (https://github.com/junyiwo/Zeus (accessed on 27 June 2022)). The methodology for building Zeus can be reused in future 360° video research (Section 3.3).
2. Related Work
2.1. 2D Video-on-Demand Streaming Systems
2.2. 360° VoD Streaming Systems
2.3. 2D Video Camera Sensing Systems
2.4. 360° Video Camera Sensing Systems
3. Measurement Design
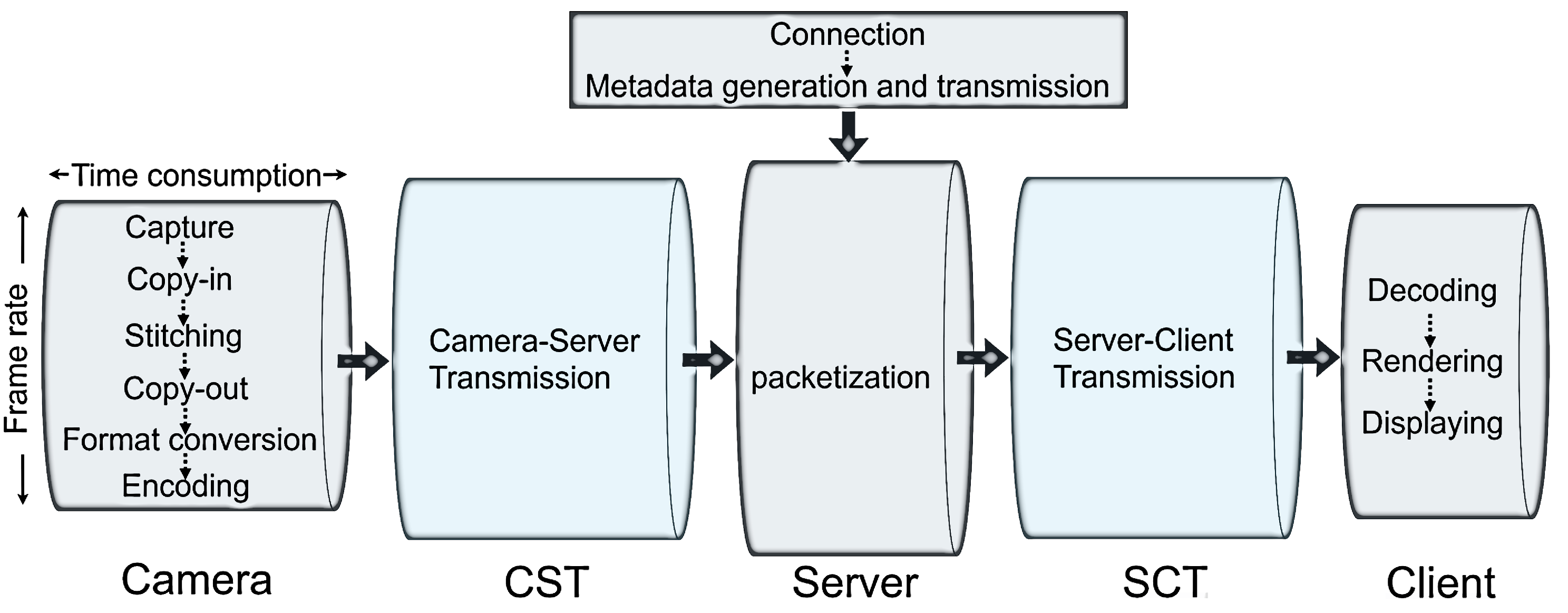
3.1. Identifying Canonical System Architecture
3.2. Analyzing Delay Metrics
3.2.1. Start-Up Delay
3.2.2. Event-to-Eye Delay
3.2.3. Frame Rate
3.2.4. Delay Dissection at the Task Level
3.3. Implementing Zeus Prototype
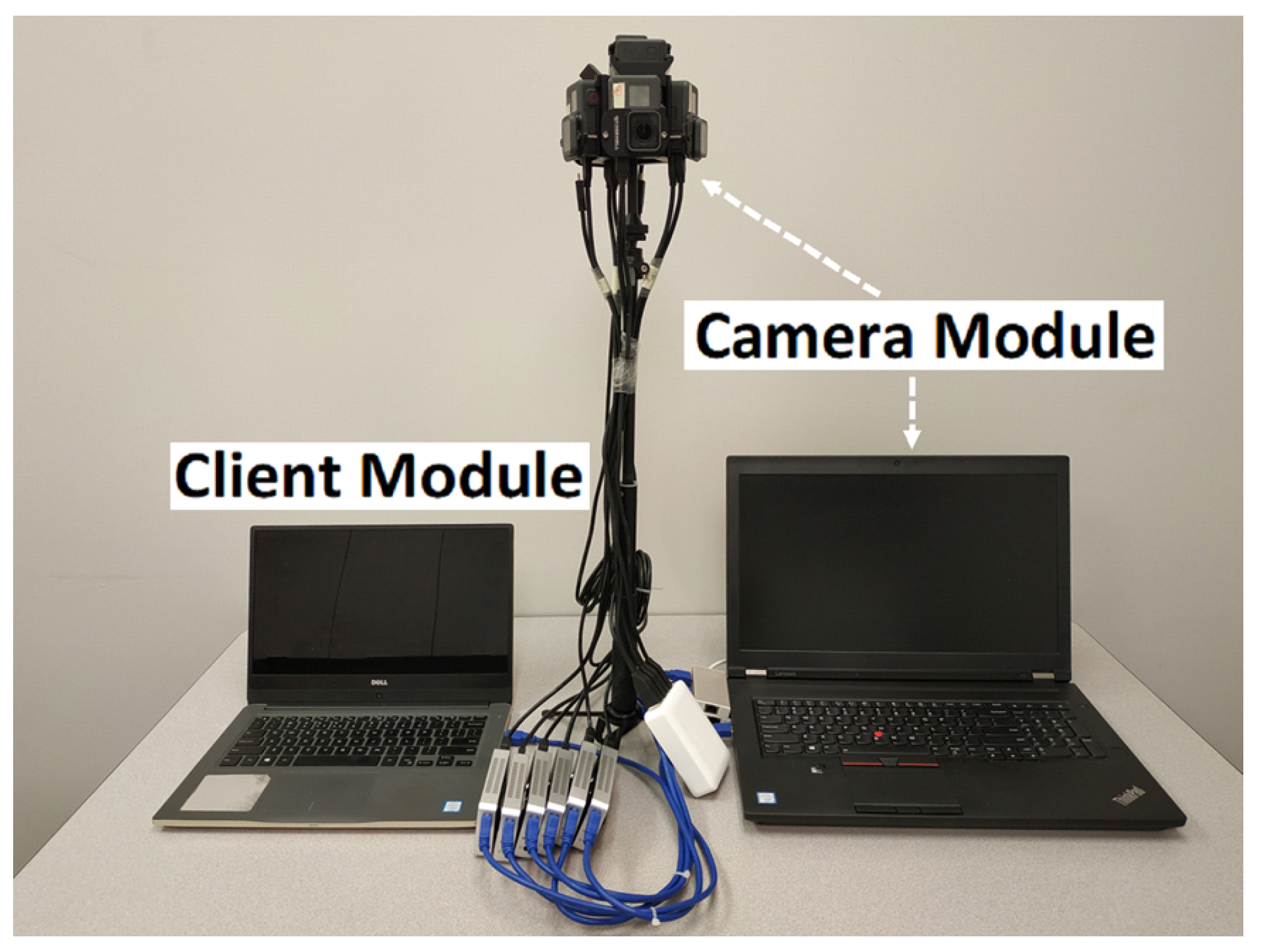
3.3.1. Hardware Design
3.3.2. Software Design
3.3.3. Measurement Methodology
4. Results
4.1. Default Experiment Scenario
4.2. 360° camera
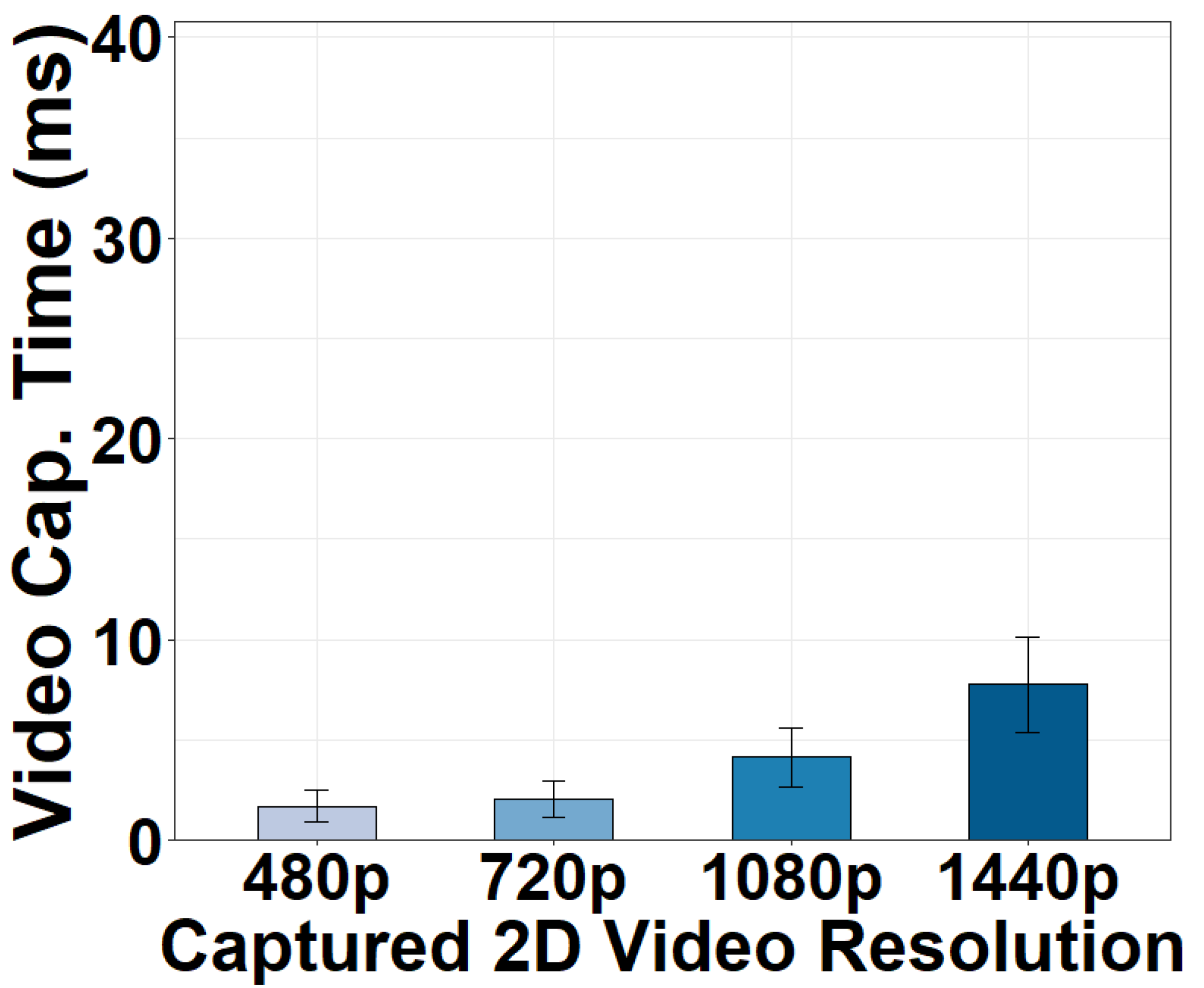
4.2.1. Video Capture Task
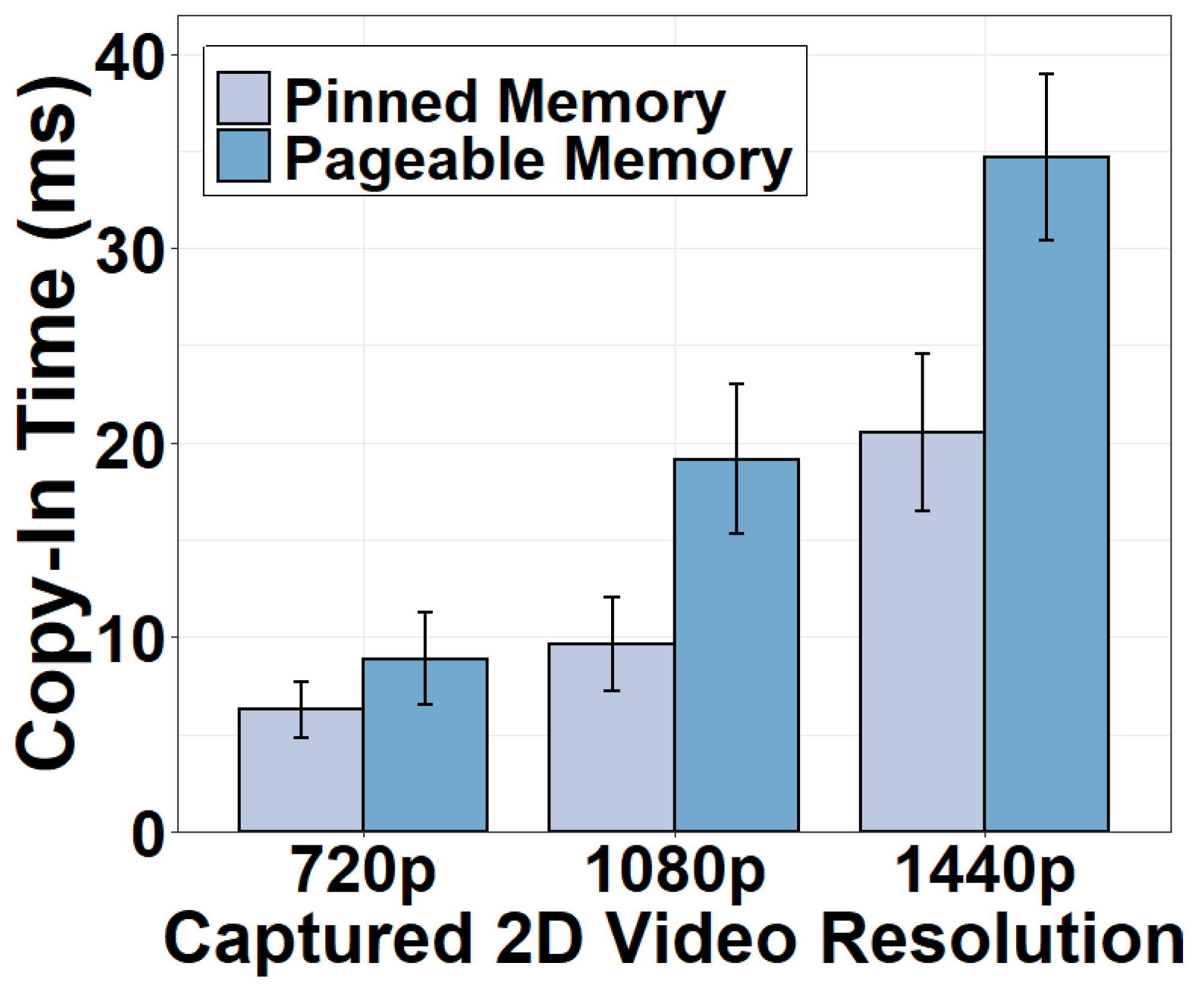
4.2.2. Copy-In and Copy-Out Tasks
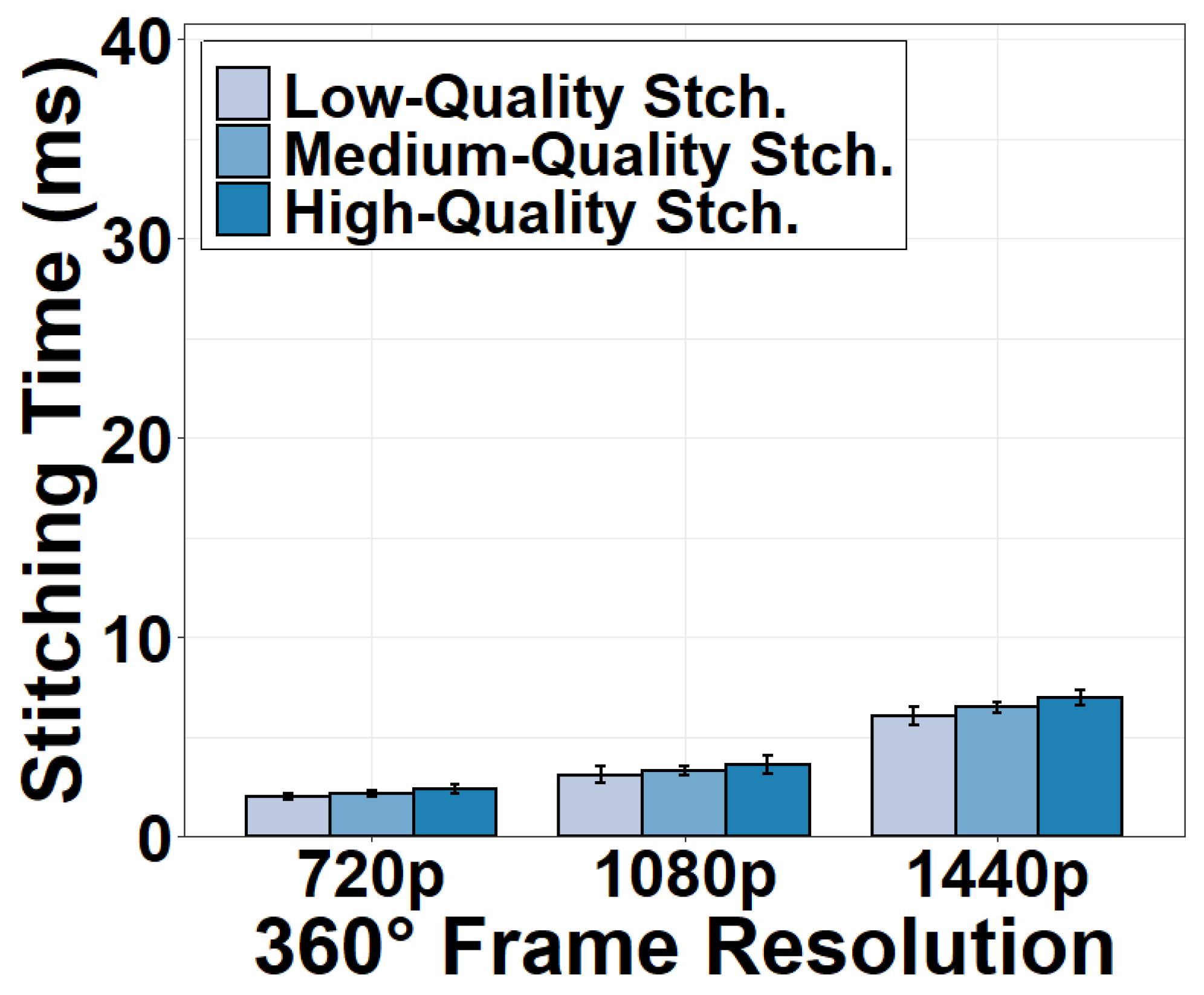
4.2.3. Stitching Task
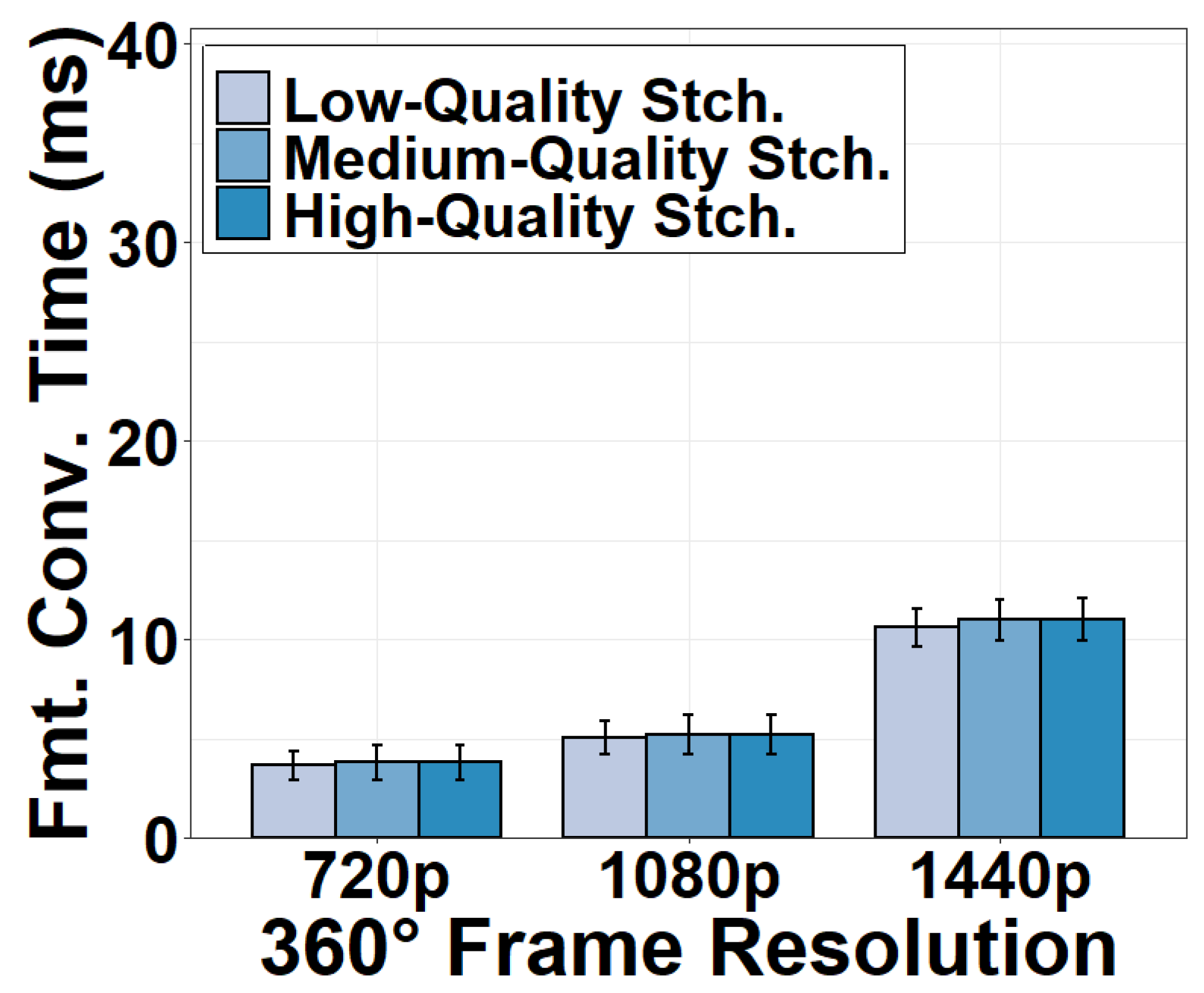
4.2.4. Format Conversion Task
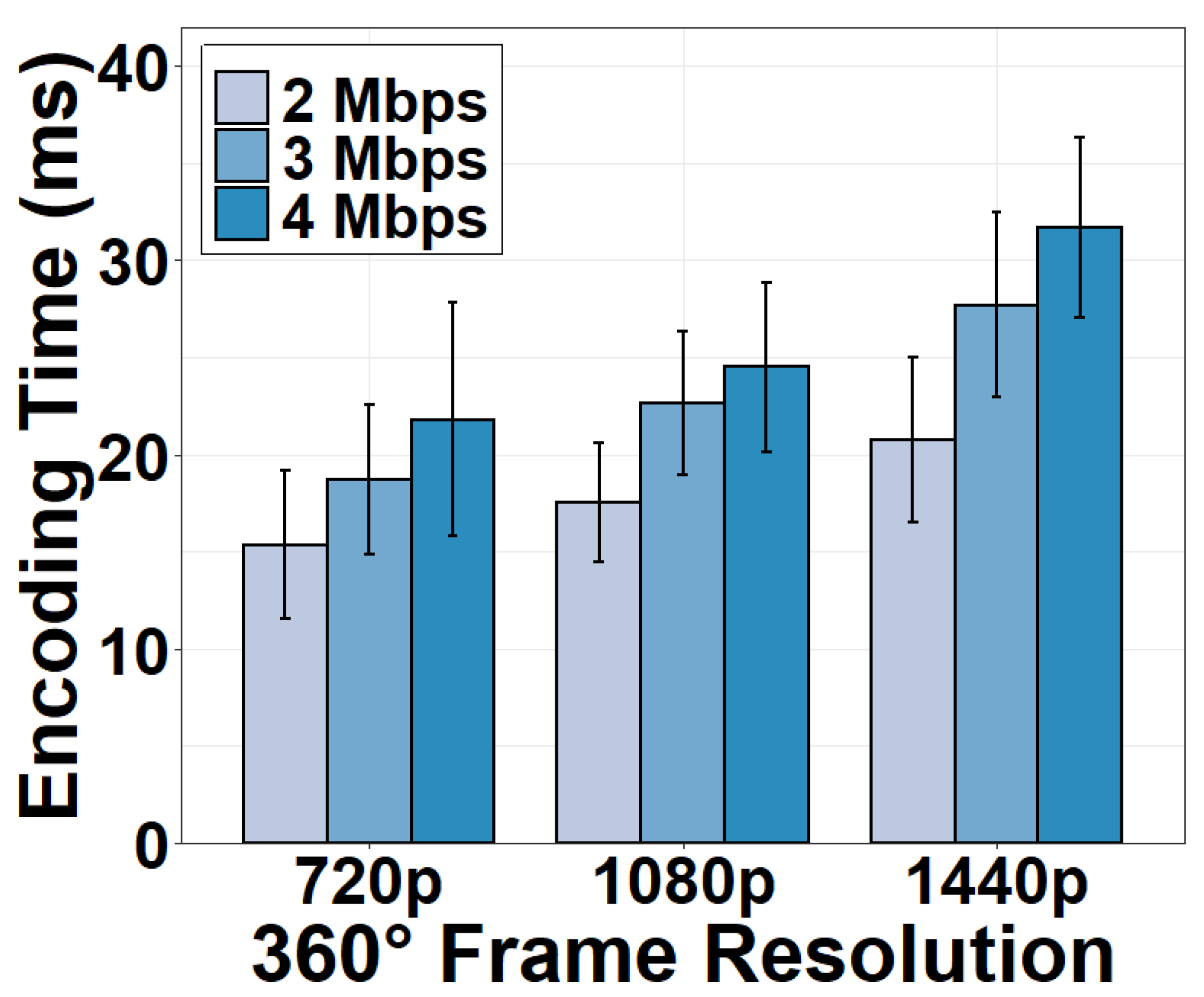
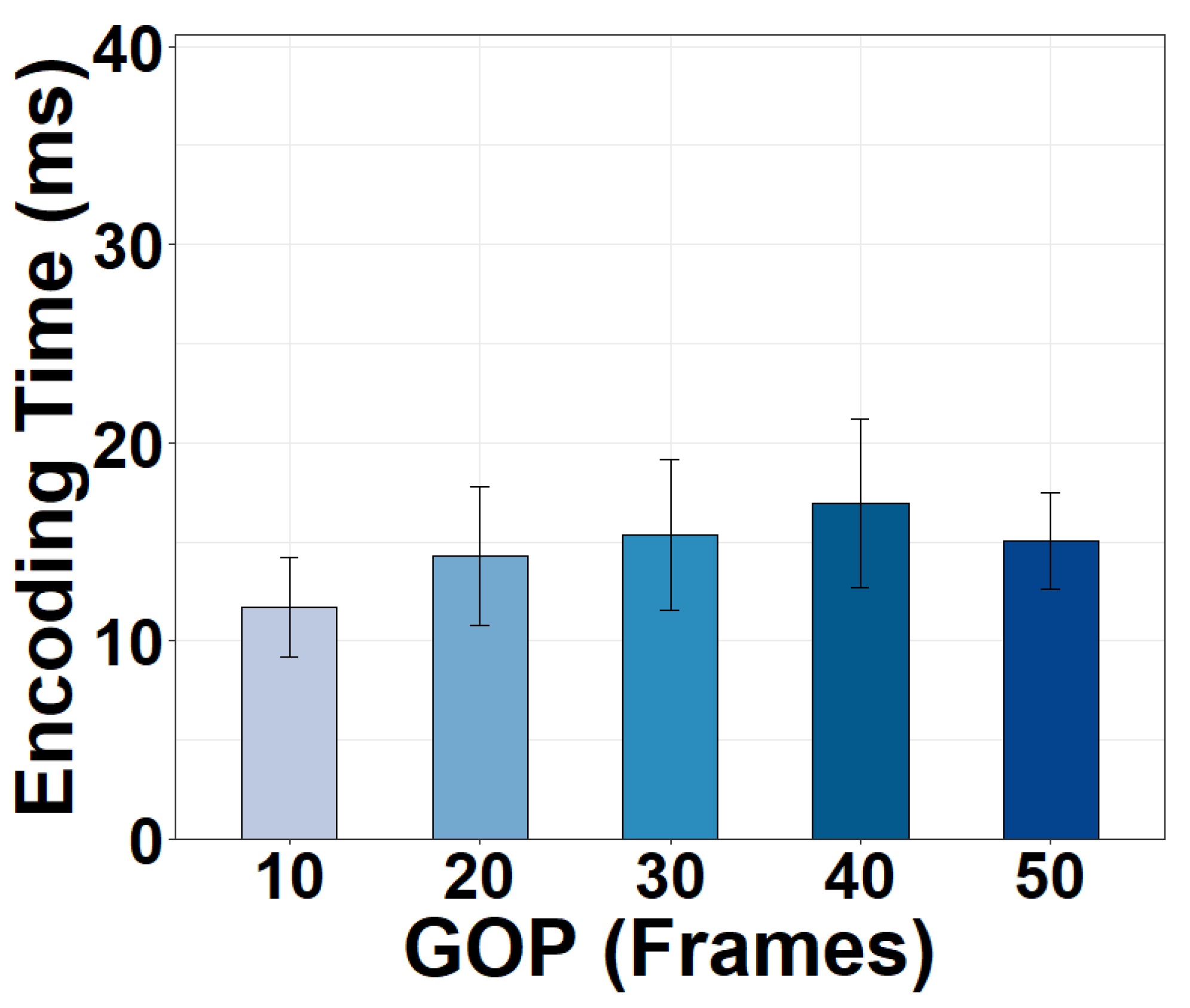
4.2.5. Encoding Task
4.2.6. Impact on Delay Metrics
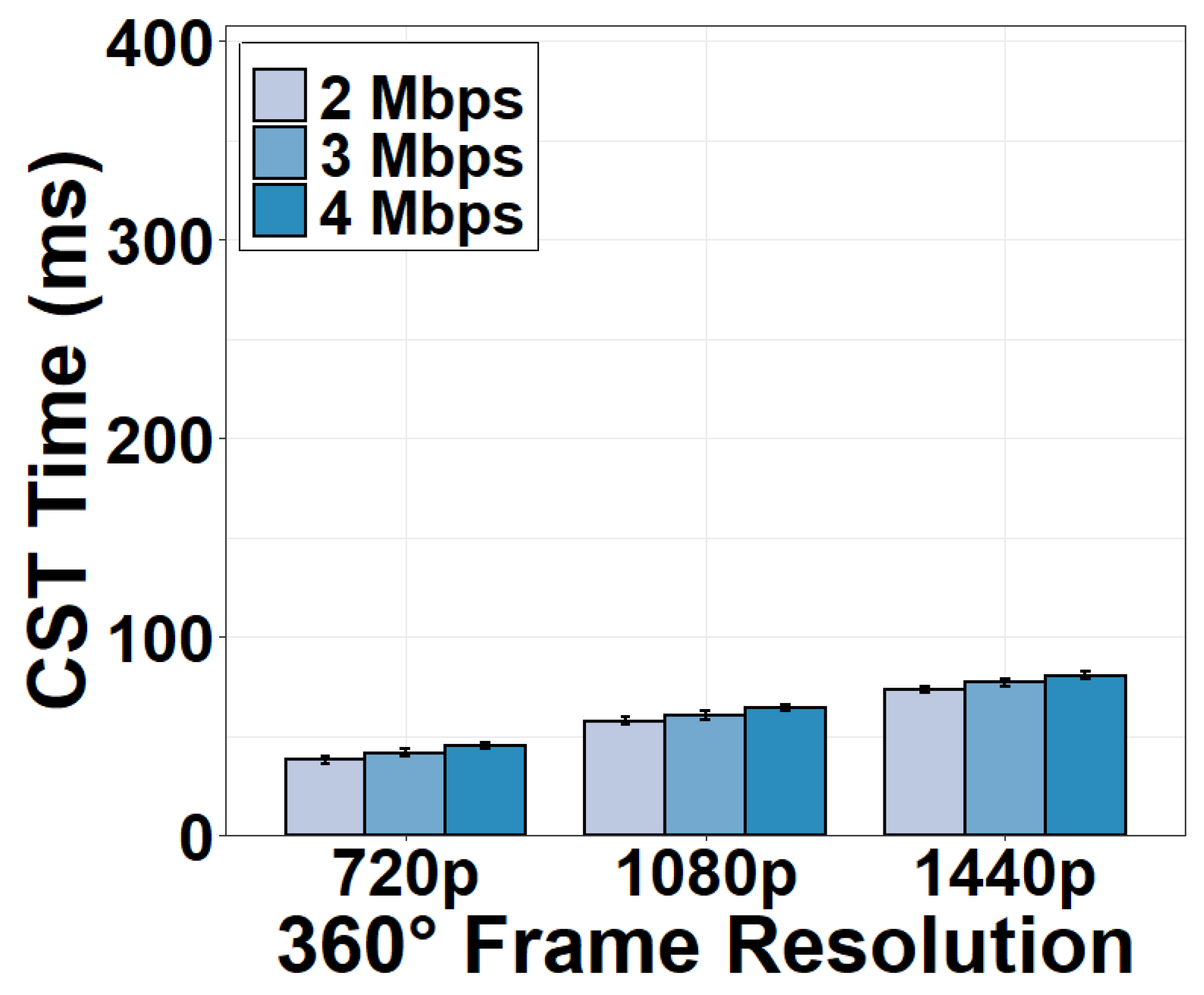
4.3. Camera-Server Transmission
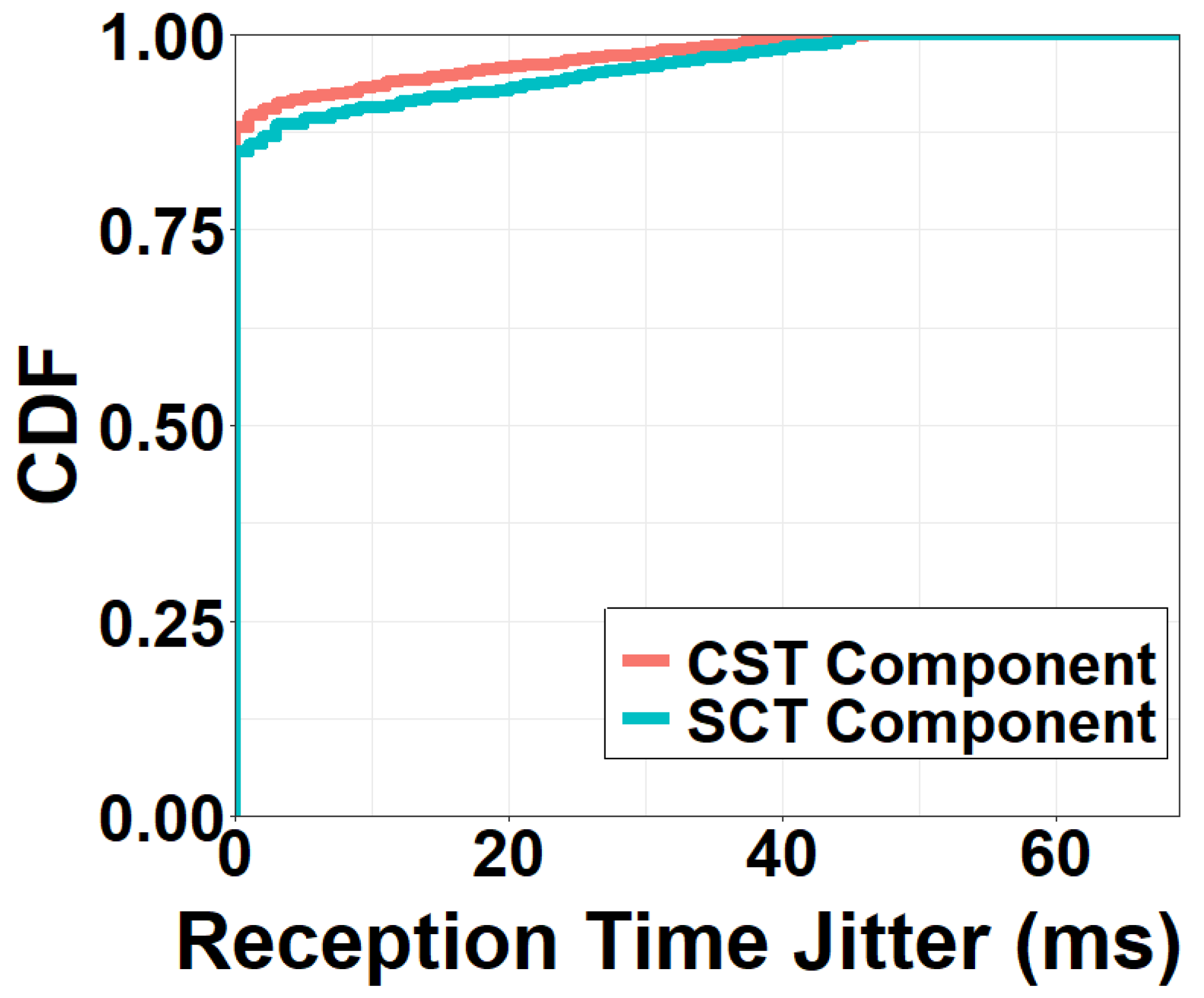
Impacts on Delay Metrics
4.4. Video Server
4.4.1. Connection Task
4.4.2. Metadata Generation and Transmission Task
4.4.3. Packetization Task
4.4.4. Impacts on Delay Metrics
4.5. Server-Client Transmission
Impacts on Delay Metrics
4.6. 360° Video Client
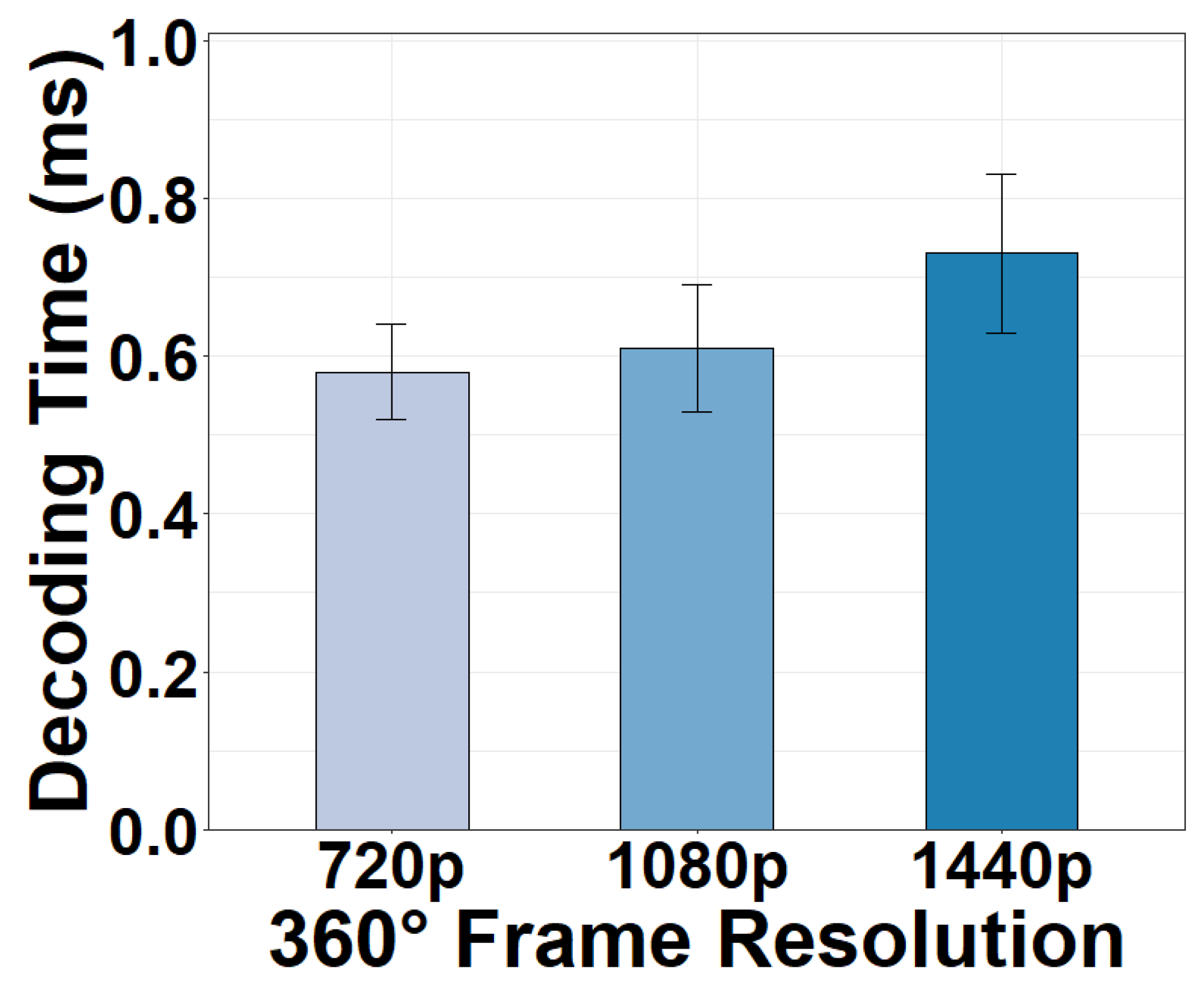
4.6.1. Decoding Task
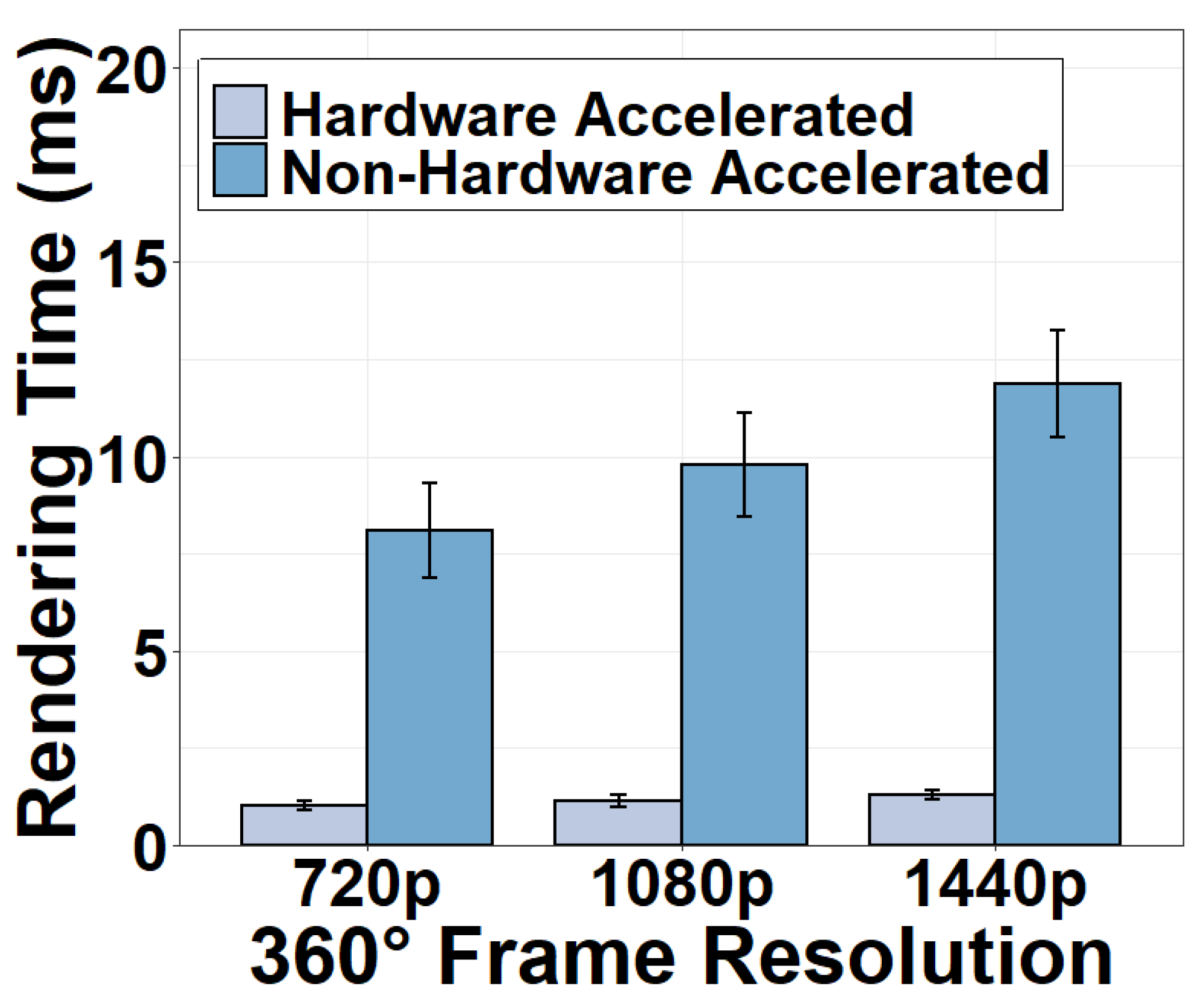
4.6.2. Rendering Task
4.6.3. Display Task
4.6.4. Impact on Delay Metrics
4.7. More Usage Scenarios
- Simple: The experiment configuration of this scenario is based on the Default scenario. The only difference is that all the lights in the lab are turned off. The captured content is almost dark except for a laptop screen showing a timer that is used to remind us of the experiment time.
- Lab Moving: Building on top of the Default scenario, the Lab Moving scenario involves a moving camera. A person holds the camera rig and walks around the lab while the camera captures content.
- Street Still: Instead of fixating the camera in the lab in the Default scenario, Street Still places the camera in a fixed position on the sidewalk of a street in a city center. Other settings remain the same as in the Default scenario.
- Street Moving: Based on the Street Still, we configure the Street Moving scenario by having a person holding the camera rig while walking on the street sidewalk.
5. Cross Validation
5.1. Experiment Setup
5.2. Cross-Validation Results
6. Conclusions and Future Work
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Fourie, C.M.; Myburgh, H.C. An Intra-Vehicular Wireless Multimedia Sensor Network for Smartphone-Based Low-Cost Advanced Driver-Assistance Systems. Sensors 2022, 22, 3026. [Google Scholar] [CrossRef] [PubMed]
- Appiah, S.A.; Li, J.; Lan, Y.; Darko, R.O.; Alordzinu, K.E.; Al Aasmi, A.; Asenso, E.; Issaka, F.; Afful, E.A.; Wang, H.; et al. Real-Time Assessment of Mandarin Crop Water Stress Index. Sensors 2022, 22, 4018. [Google Scholar] [CrossRef] [PubMed]
- Ranyal, E.; Sadhu, A.; Jain, K. Road condition monitoring using smart sensing and artificial intelligence: A review. Sensors 2022, 22, 3044. [Google Scholar] [CrossRef] [PubMed]
- Chen, B.; Yan, Z.; Nahrstedt, K. Context-aware Image Compression Optimization for Visual Analytics Offloading. In Proceedings of the ACM Multimedia Systems Conference (MMSys’22), Athlone, Ireland, 14–17 June 2022; ACM: New York, NY, USA, 2022. [Google Scholar]
- Wang, B.; Zhang, X.; Wang, G.; Zheng, H.; Zhao, B.Y. Anatomy of a personalized livestreaming system. In Proceedings of the 2016 Internet Measurement Conference, Santa Monica, CA, USA, 14–16 November 2016; pp. 485–498. [Google Scholar]
- Siekkinen, M.; Kämäräinen, T.; Favario, L.; Masala, E. Can you see what I see? Quality-of-experience measurements of mobile live video broadcasting. ACM Trans. Multimed. Comput. Commun. Appl. (TOMM) 2018, 14, 1–23. [Google Scholar] [CrossRef]
- Tang, J.C.; Venolia, G.; Inkpen, K.M. Meerkat and periscope: I stream, you stream, apps stream for live streams. In Proceedings of the 2016 CHI Conference on Human Factors in Computing Systems, San Jose, CA, USA, 7–12 May 2016; ACM: New York, NY, USA, 2016; pp. 4770–4780. [Google Scholar]
- Corbillon, X.; Devlic, A.; Simon, G.; Chakareski, J. Optimal set of 360-degree videos for viewport-adaptive streaming. In Proceedings of the 25th ACM international Conference on Multimedia, Mountain View, CA, USA, 23–27 October 2017; ACM: New York, NY, USA, 2017; pp. 943–951. [Google Scholar]
- Corbillon, X.; De Simone, F.; Simon, G.; Frossard, P. Dynamic adaptive streaming for multi-viewpoint omnidirectional videos. In Proceedings of the 9th ACM Multimedia Systems Conference, Amsterdam, The Netherlands, 12–15 June 2018; ACM: New York, NY, USA, 2018; pp. 237–249. [Google Scholar]
- Nguyen, A.; Yan, Z.; Nahrstedt, K. Your attention is unique: Detecting 360-degree video saliency in head-mounted display for head movement prediction. In Proceedings of the 2018 ACM Multimedia Conference on Multimedia Conference, Seoul, Korea, 22–26 October 2018; ACM: New York, NY, USA, 2018; pp. 1190–1198. [Google Scholar]
- Chen, B.; Yan, Z.; Jin, H.; Nahrstedt, K. Event-driven stitching for tile-based live 360 video streaming. In Proceedings of the 10th ACM Multimedia Systems Conference, Amherst, MA, USA, 18–21 June 2019; pp. 1–12. [Google Scholar]
- Corbillon, X.; Simon, G.; Devlic, A.; Chakareski, J. Viewport-adaptive navigable 360-degree video delivery. In Proceedings of the 2017 IEEE international conference on communications (ICC), Paris, France, 21–25 May 2017; pp. 1–7. [Google Scholar]
- Nasrabadi, A.T.; Mahzari, A.; Beshay, J.D.; Prakash, R. Adaptive 360-degree video streaming using scalable video coding. In Proceedings of the 25th ACM international conference on Multimedia, Mountain View, CA, USA, 23–27 October 2017; ACM: New York, NY, USA, 2017; pp. 1689–1697. [Google Scholar]
- Zhou, C.; Li, Z.; Liu, Y. A measurement study of oculus 360 degree video streaming. In Proceedings of the 8th ACM on Multimedia Systems Conference, Taipei, Taiwan, 20–23 June 2017; ACM: New York, NY, USA, 2017; pp. 27–37. [Google Scholar]
- Yi, J.; Luo, S.; Yan, Z. A measurement study of YouTube 360° live video streaming. In Proceedings of the 29th ACM Workshop on Network and Operating Systems Support for Digital Audio and Video, Amherst, MA, USA, 21 June 2019; ACM: New York, NY, USA, 2019; pp. 49–54. [Google Scholar]
- Liu, X.; Han, B.; Qian, F.; Varvello, M. LIME: Understanding commercial 360° live video streaming services. In Proceedings of the 10th ACM Multimedia Systems Conference, Amherst, MA, USA, 18–21 June 2019; pp. 154–164. [Google Scholar]
- Juluri, P.; Tamarapalli, V.; Medhi, D. Measurement of quality of experience of video-on-demand services: A survey. IEEE Commun. Surv. Tutor. 2015, 18, 401–418. [Google Scholar] [CrossRef]
- Bajpai, V.; Ahsan, S.; Schönwälder, J.; Ott, J. Measuring YouTube content delivery over IPv6. ACM SIGCOMM Comput. Commun. Rev. 2017, 47, 2–11. [Google Scholar] [CrossRef]
- Yarnagula, H.K.; Vooda, R.K.; Tamarapalli, V. A measurement study of energy consumption anc QoE trade-offs for DASH in mobile devices. In Proceedings of the 2016 IEEE International Conference on Advanced Networks and Telecommunications Systems (ANTS), Bangalore, India, 6–9 November 2016; pp. 1–3. [Google Scholar]
- Xu, S.; Sen, S.; Mao, Z.M.; Jia, Y. Dissecting VOD services for cellular: Performance, root causes and best practices. In Proceedings of the 2017 Internet Measurement Conference, London, UK, 1–3 November 2017; pp. 220–234. [Google Scholar]
- Guo, J.; Gong, X.; Wang, W.; Que, X.; Liu, J. Sasrt: Semantic-aware super-resolution transmission for adaptive video streaming over wireless multimedia sensor networks. Sensors 2019, 19, 3121. [Google Scholar] [CrossRef]
- Kim, M.; Chung, K. Reinforcement Learning-Based Adaptive Streaming Scheme with Edge Computing Assistance. Sensors 2022, 22, 2171. [Google Scholar] [CrossRef]
- Afzal, S.; Chen, J.; Ramakrishnan, K. Characterization of 360-degree videos. In Proceedings of the Workshop on Virtual Reality and Augmented Reality Network, Los Angeles, CA, USA, 25 August 2017; pp. 1–6. [Google Scholar]
- De la Fuente, Y.S.; Bhullar, G.S.; Skupin, R.; Hellge, C.; Schierl, T. Delay impact on MPEG OMAF’s tile-based viewport-dependent 360° video streaming. IEEE J. Emerg. Sel. Top. Circuits Syst. 2019, 9, 18–28. [Google Scholar] [CrossRef]
- Grzelka, A.; Dziembowski, A.; Mieloch, D.; Stankiewicz, O.; Stankowski, J.; Domański, M. Impact of Video Streaming Delay on User Experience with Head-Mounted Displays. In Proceedings of the 2019 Picture Coding Symposium (PCS), Ningbo, China, 12–15 November 2019; pp. 1–5. [Google Scholar]
- Jeong, J.; Jang, D.; Son, J.; Ryu, E.S. 3DoF+ 360 video location-based asymmetric down-sampling for view synthesis to immersive VR video streaming. Sensors 2018, 18, 3148. [Google Scholar] [CrossRef] [PubMed]
- Aggarwal, S.; Paul, S.; Dash, P.; Illa, N.S.; Hu, Y.C.; Koutsonikolas, D.; Yan, Z. How to evaluate mobile 360° video streaming systems? In Proceedings of the 21st International Workshop on Mobile Computing Systems and Applications, Austin, TX, USA, 3 March 2020; pp. 68–73. [Google Scholar]
- Nguyen, D.V.; Le, T.T.; Lee, S.; Ryu, E.S. SHVC tile-based 360-degree video streaming for mobile VR: PC offloading over mmWave. Sensors 2018, 18, 3728. [Google Scholar] [CrossRef] [PubMed]
- Nihei, K.; Yoshida, H.; Kai, N.; Satoda, K.; Chono, K. Adaptive bitrate control of scalable video for live video streaming on best-effort network. In Proceedings of the 2018 IEEE Global Communications Conference (GLOBECOM), Abu Dhabi, United Arab Emirates, 9–13 December 2018; pp. 1–7. [Google Scholar]
- Sun, K.; Zhang, H.; Gao, Y.; Wu, D. Delay-aware fountain codes for video streaming with optimal sampling strategy. J. Commun. Netw. 2019, 21, 339–352. [Google Scholar] [CrossRef]
- Yi, J.; Islam, M.R.; Aggarwal, S.; Koutsonikolas, D.; Hu, Y.C.; Yan, Z. An analysis of delay in live 360° video streaming systems. In Proceedings of the 28th ACM International Conference on Multimedia, Seattle, WA, USA, 12–16 October 2020; pp. 982–990. [Google Scholar]
- The Video Problem: 3 Reasons Why Users Leave a Website with Badly Implemented Video. 2020. Available online: https://bitmovin.com/video-problem-3-reasons-users-leave-website-badly-implemented-video/ (accessed on 27 June 2022).
- Kaknjo, A.; Rao, M.; Omerdic, E.; Newe, T.; Toal, D. Real-Time Secure/Unsecure Video Latency Measurement/Analysis with FPGA-Based Bump-in-the-Wire Security. Sensors 2019, 19, 2984. [Google Scholar] [CrossRef] [PubMed]
- GoPro Hero6. 2020. Available online: https://www.aircraftspruce.com/catalog/avpages/goprohero6.php?utm_source=google&utm_medium=organic&utm_campaign=shopping&utm_term=11-15473 (accessed on 27 June 2022).
- VRWorks—360 Video. 2019. Available online: https://developer.nvidia.com/vrworks/vrworks-360video (accessed on 27 June 2022).
- Zhang, Z. A flexible new technique for camera calibration. IEEE Trans. Pattern Anal. Mach. Intell. 2000, 22, 1330–1334. [Google Scholar] [CrossRef]
- Second-Order Intercept Point. 2013. Available online: https://en.wikipedia.org/wiki/Second-order_intercept_point (accessed on 27 June 2022).
- Nginx-Http-Flv-Module. 2018. Available online: https://github.com/winshining/nginx-http-flv-module (accessed on 27 June 2022).
- YouTube. 2020. Available online: https://www.youtube.com/ (accessed on 27 June 2022).
- Facebook 360 Video. 2020. Available online: https://facebook360.fb.com/live360/ (accessed on 27 June 2022).
- Lee, W.T.; Chen, H.I.; Chen, M.S.; Shen, I.C.; Chen, B.Y. High-resolution 360 Video Foveated Stitching for Real-time VR. In Proceedings of the Computer Graphics Forum; Wiley Online Library: Hoboken, NJ, USA, 2017; Volume 36, pp. 115–123. [Google Scholar]
- Silva, R.M.; Feijó, B.; Gomes, P.B.; Frensh, T.; Monteiro, D. Real time 360 video stitching and streaming. In Proceedings of the ACM SIGGRAPH 2016 Posters, Anaheim, CA, USA, 24–28 July 2016; ACM: New York, NY, USA, 2016; pp. 1–2. [Google Scholar]
- Ricoh Theta S. 2020. Available online: https://theta360.com/en/about/theta/s.html (accessed on 27 June 2022).
- Szigeti, T.; Hattingh, C. Quality of Service Design Overview; Cisco Systems: San Jose, CA, USA, 2004; pp. 1–34. [Google Scholar]
- Xiao, X. Technical, Commercial and Regulatory Challenges of QoS: An Internet Service Model Perspective; Morgan Kaufmann: Burlington, MA, USA, 2008. [Google Scholar]
- Wireless Live Streaming. 2019. Available online: https://pluginstore.theta360.com/ (accessed on 27 June 2022).
- Pearson Correlation Coefficient. 2020. Available online: https://en.wikipedia.org/wiki/Pearson_correlation_coefficient (accessed on 27 June 2022).
- Distance Correlation. 2020. Available online: https://en.wikipedia.org/wiki/Distance_correlation (accessed on 27 June 2022).
- Cosine Similarity. 2020. Available online: https://en.wikipedia.org/wiki/Cosine_similarity (accessed on 27 June 2022).
- Xu, J.; Zhou, W.; Chen, Z. Blind omnidirectional image quality assessment with viewport oriented graph convolutional networks. IEEE Trans. Circuits Syst. Video Technol. 2020, 31, 1724–1737. [Google Scholar] [CrossRef]
- Zhou, W.; Xu, J.; Jiang, Q.; Chen, Z. No-reference quality assessment for 360-degree images by analysis of multifrequency information and local-global naturalness. IEEE Trans. Circuits Syst. Video Technol. 2021, 32, 1778–1791. [Google Scholar] [CrossRef]
- Li, C.; Xu, M.; Jiang, L.; Zhang, S.; Tao, X. Viewport proposal CNN for 360 video quality assessment. In Proceedings of the 2019 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), Long Beach, CA, USA, 15–20 June 2019; pp. 10169–10178. [Google Scholar]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Component | Computing Task | Task Definition |
|---|---|---|
| Camera | Video capture | Obtain a video frame from each 2D camera lens of the 360° camera and put them in memory |
| Copy-in | Transfer the stored 2D video frames from the memory to the GPU | |
| Stitching | Utilize the GPU to stitch multiple 2D video frames into an equirectangular 360° video frame | |
| Copy-out | Transfer the 360° video frame from the GPU to the memory | |
| Format conversion | Use the CPU to convert the stitched RGB frame to the YUV format | |
| Encoding | Compresses the YUV equirectangular 360° video frame using an H.264 encoder | |
| CST | CST | Deliver data packets of the 360° video frame from the camera to the server |
| Server | Connection | Establish a connection with the client after a user clicks the live streaming URL |
| Metadata Generation | Create a metadata file for the live 360° video and send it to the client | |
| Packetization | Packetize the received camera data for streaming | |
| SCT | SCT | Transmit data packets of the 360° video frame from the server to the client |
| Client | Decoding | Convert the received packets to 360° video frames |
| Rendering | Project the decoded equirectangula frame into a spherical frame and render the pixels of the | |
| selected viewport on the spherical frame | ||
| Display | Send viewport data to the display buffer and show the buffered data when screen refreshes |
| Motion | Resolution | PCC | DC | CS |
|---|---|---|---|---|
| Static | 720p | 0.989045 | 0.993842 | 0.990239 |
| 1080p | 0.987980 | 0.994173 | 0.990135 | |
| 1440p | 0.987269 | 0.994539 | 0.990206 | |
| Moving | 720p | 0.990334 | 0.994896 | 0.992691 |
| 1080p | 0.990994 | 0.995165 | 0.992799 | |
| 1440p | 0.992019 | 0.995811 | 0.993636 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yan, Z.; Yi, J. Dissecting Latency in 360° Video Camera Sensing Systems. Sensors 2022, 22, 6001. https://doi.org/10.3390/s22166001
Yan Z, Yi J. Dissecting Latency in 360° Video Camera Sensing Systems. Sensors. 2022; 22(16):6001. https://doi.org/10.3390/s22166001
Chicago/Turabian StyleYan, Zhisheng, and Jun Yi. 2022. "Dissecting Latency in 360° Video Camera Sensing Systems" Sensors 22, no. 16: 6001. https://doi.org/10.3390/s22166001
APA StyleYan, Z., & Yi, J. (2022). Dissecting Latency in 360° Video Camera Sensing Systems. Sensors, 22(16), 6001. https://doi.org/10.3390/s22166001