
An All-Fiber Optical Sensor Combined with FBG and CFBG-FP for Attitude Estimation

Abstract
:1. Introduction
2. Structural Design and Method for Attitude Estimation
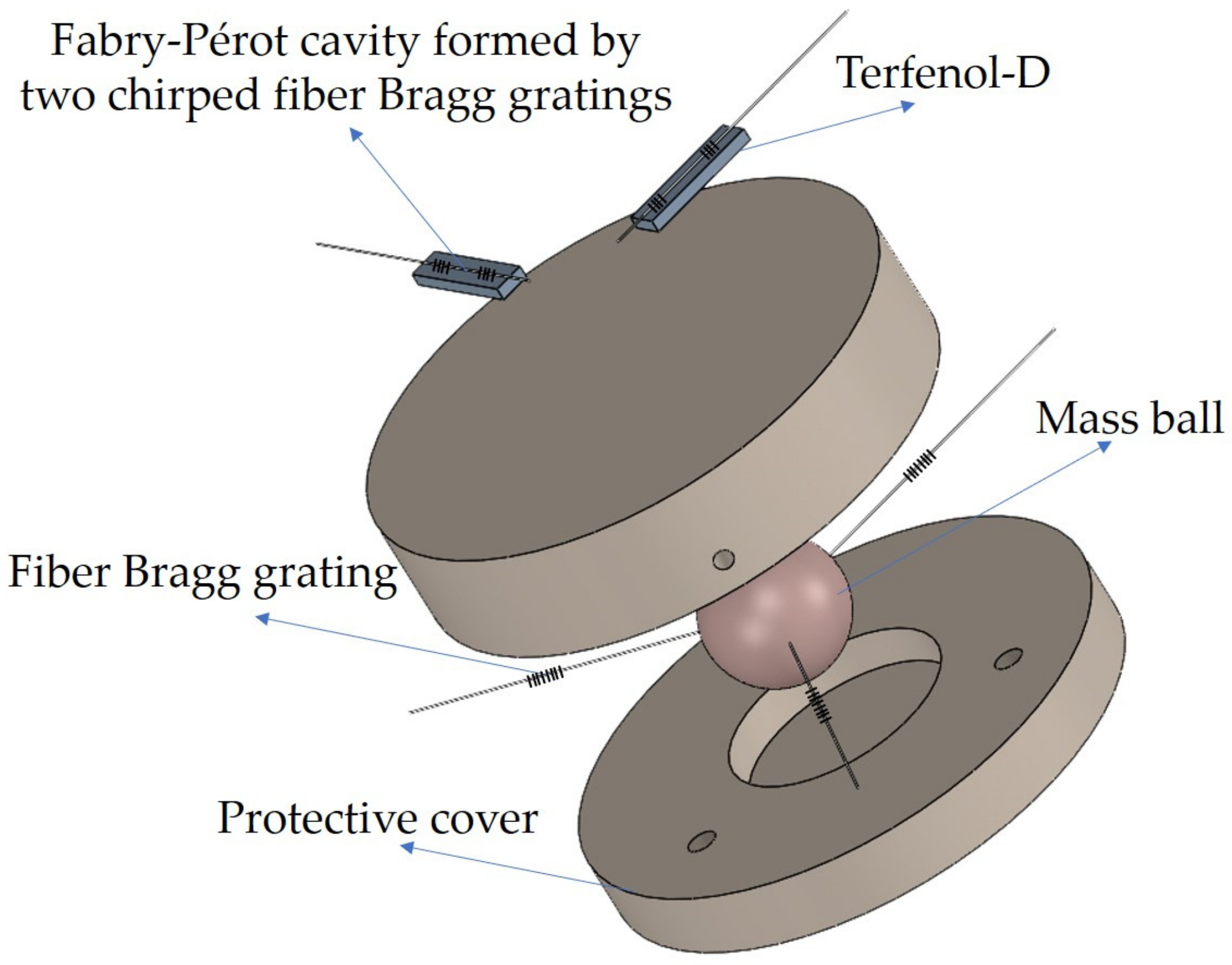
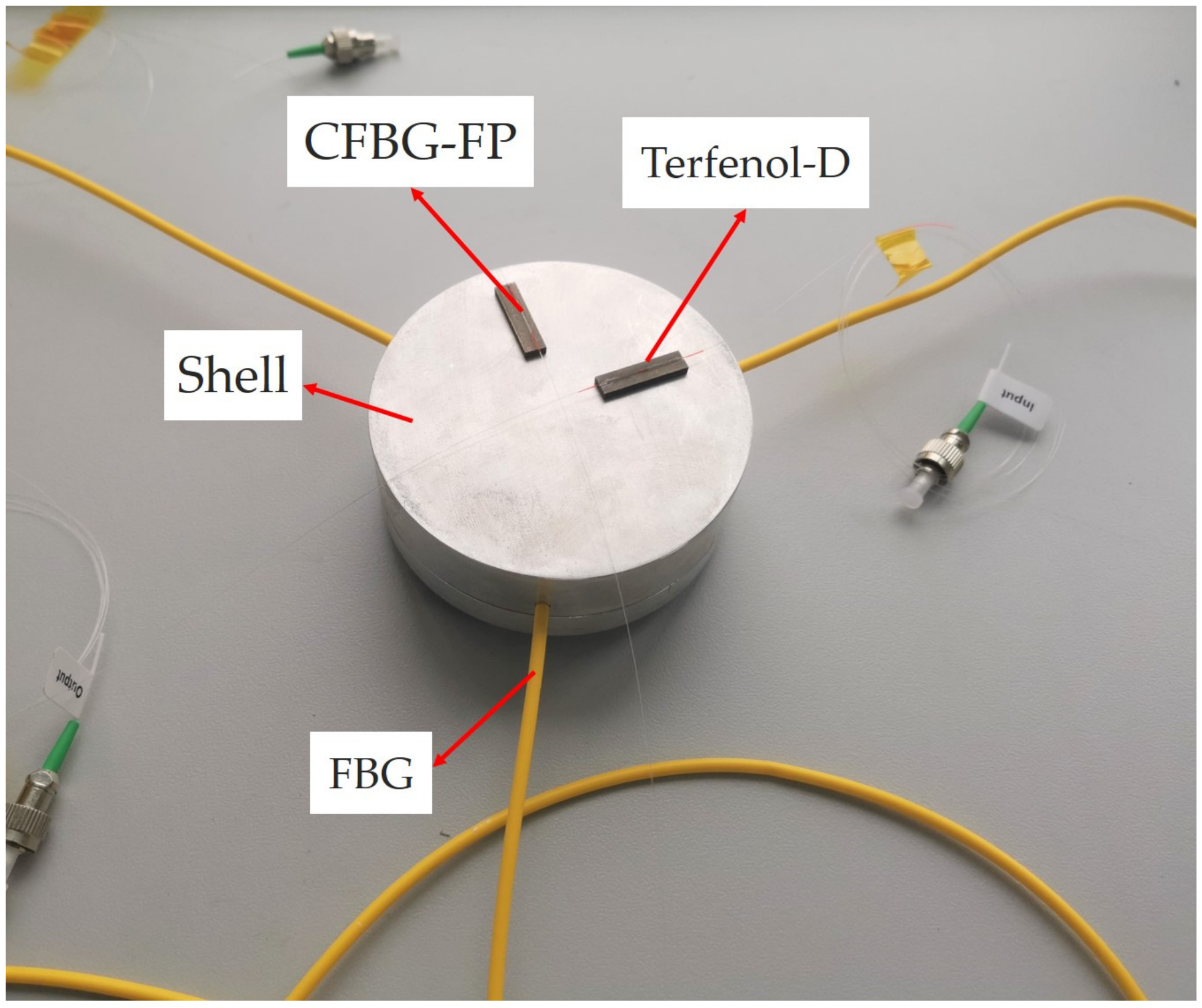
2.1. Design and Fabrication of an Attitude Measurement System
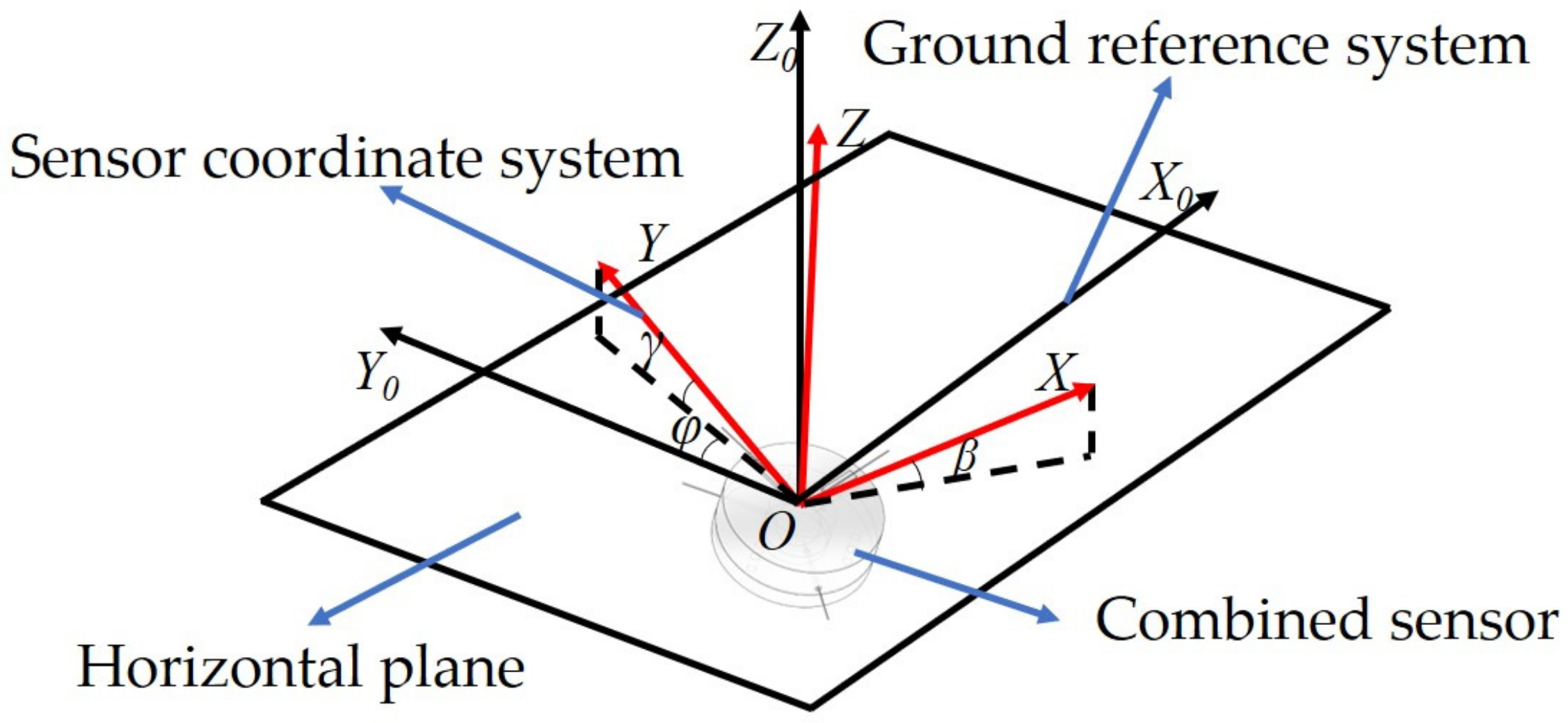
2.2. Sensing Principles of the FBG Sensor for Pitch and Roll Angles Detection
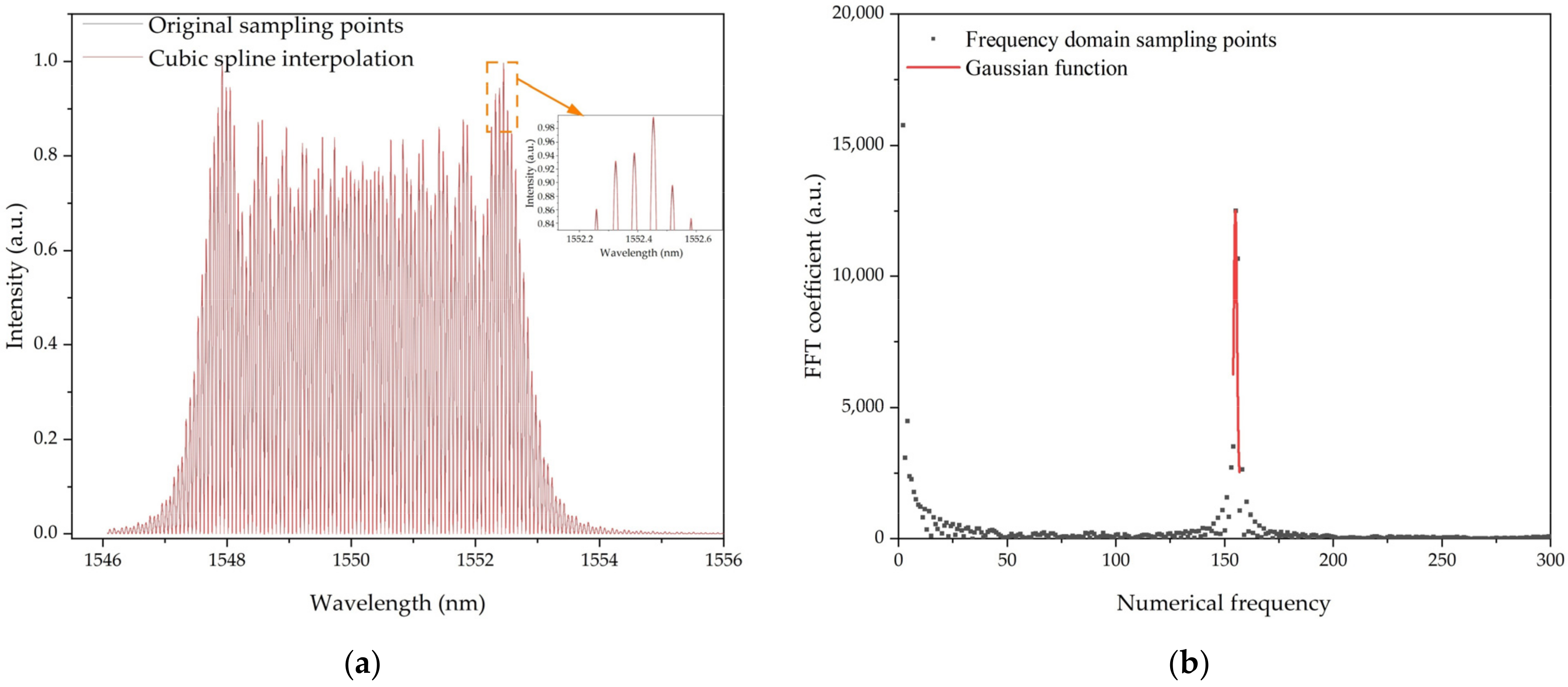
2.3. Sensing Principles of the Fiber CFBG-FP Sensor for Heading Angle Detection
3. Experimental Results
3.1. Experimental System
3.2. Potential Applications of All-Fiber Optical Sensor Combined with FBG and CFBG-FP for Attitude Estimation of Underwater Detection System
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Xia, X.; Xiong, L.; Lu, Y.; Gao, L.; Yu, Z. Vehicle sideslip angle estimation by fusing inertial measurement unit and global navigation satellite system with heading alignment. Mech. Syst. Signal Process. 2021, 150, 107290. [Google Scholar] [CrossRef]
- Maeder, U.; Morari, M. Attitude Estimation for Vehicles with Partial Inertial Measurement. IEEE Trans. Veh. Technol. 2011, 60, 1496–1504. [Google Scholar] [CrossRef]
- Ahn, H.S. Vision-based magnetic heading sensor for mobile robot guidance. Electron. Lett. 2009, 45, 819–821. [Google Scholar] [CrossRef]
- Lloret, J.; Sendra, S.; Ardid, M.; Rodrigues, J.J. Underwater wireless sensor communications in the 2.4 GHz ISM frequency band. Sensors 2012, 12, 4237–4264. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Lorga, J.; Silva, P.F. Attitude Determination Using a Multi-antenna GNSS Receiver Tightly Integrated with a MEMS IMU. In Proceedings of the 20th International Technical Meeting of the Satellite Division of The Institute of Navigation, Fort Worth, TX, USA; 2007. [Google Scholar]
- Cai, X.; Hsu, H.; Chai, H.; Ding, L.; Wang, Y. Multi-antenna GNSS and INS Integrated Position and Attitude Determination without Base Station for Land Vehicles. J. Navig. 2019, 72, 342–358. [Google Scholar] [CrossRef]
- Meibo, L.; Naqvi, N.A.; Li, Y.J. Standalone Multi Antenna GNSS Code Based Attitude Determination of Nanosatellite: Design and Implementation. Appl. Mech. Mater. 2013, 332, 111–118. [Google Scholar] [CrossRef]
- Li, X.; Meng, X.; Dai, M.; Gu, Q. Research on the attitude determination of MEMS based on adaptive filter. Chin. J. Sens. Actuators 2016, 29, 1853–1857. [Google Scholar]
- Yong, L.; Efatmaneshnik, M.; Dempster, A.G. Attitude determination by integration of MEMS inertial sensors and GPS for autonomous agriculture applications. GPS Solut. 2012, 16, 41–52. [Google Scholar]
- Ahmed, H.; Tahir, M. Accurate Attitude Estimation of a Moving Land Vehicle Using Low-Cost MEMS IMU Sensors. IEEE Trans. Intell. Transp. Syst. 2017, 18, 1723–1739. [Google Scholar] [CrossRef]
- Včelák, J.; Kubík, J. Influence of sensor imperfections to electronic compass attitude accuracy. Sens. Actuators A Phys. 2009, 155, 233–240. [Google Scholar] [CrossRef]
- Crowell, J. Low Cost Solid State Attitude Sensor for Marine and General Applications. In Proceedings of the Oceans 2006, Boston, MA, USA, 18–21 September 2006. [Google Scholar]
- Carpenter, R.; Silvia, M.; Cray, B. The design of a broadband ocean acoustic laboratory: Detailed examination of vector sensor performance. In Proceedings of the Unattended Ground, Sea, and Air Sensor Technologies and Applications VIII, Kissimmee, FL, USA, 17-20 April 2006. [Google Scholar]
- Shi, G.; Li, X.; Wang, Z.; Liu, Y. A new measurement for yaw estimation of land vehicles using MARG sensors. Sens. Rev. 2019, 39, 636–644. [Google Scholar] [CrossRef]
- Wu, J. MARG Attitude Estimation Using Gradient-Descent Linear Kalman Filter. IEEE Trans. Autom. Sci. Eng. 2020, 17, 1777–1790. [Google Scholar] [CrossRef]
- Hemerly, E.M.; Maciel, B.; Milhan, A.; Schad, V.R. Attitude and heading reference system with acceleration compensation. Aircr. Eng. Aerosp. Technol. 2012, 84, 87–93. [Google Scholar] [CrossRef]
- Luken, M.; Misgeld, B.J.; Ruschen, D.; Leonhardt, S. Multi-sensor calibration of low-cost magnetic, angular rate and gravity systems. Sensors 2015, 15, 25919–25936. [Google Scholar] [CrossRef] [Green Version]
- Jurman, D.; Jankovec, M.; Kamnik, R.; Topič, M. Calibration and data fusion solution for the miniature attitude and heading reference system. Sens. Actuators A Phys. 2007, 138, 411–420. [Google Scholar] [CrossRef]
- Zhang, H. Characteristic Analysis of Noise Acoustic Field of Fiber-Optic Vector Hydrophone. Master’s Thesis, National University of Defense Technology, Changsha, China, 2008. [Google Scholar]
- Chen, H.J.; Wang, L.; Liu, W.F. Temperature-insensitive fiber Bragg grating tilt sensor. Appl. Opt. 2008, 47, 556–560. [Google Scholar] [CrossRef] [Green Version]
- Au, H.Y.; Khijwania, S.K.; Fu, H.Y.; Chung, W.H.; Tam, H.Y. Temperature-Insensitive Fiber Bragg Grating Based Tilt Sensor with Large Dynamic Range. J. Lightwave Technol. 2011, 29, 1714–1720. [Google Scholar] [CrossRef]
- Zhang, X. Study of Fiber Optic Magnetic Field Sensing for Towed Array Shape Measurement. Ph.D. Thesis, National University of Defense Technology, Changsha, China, 2007. [Google Scholar]
- Teng, D.; Li, Y. Finite Element Solutions for Magnetic Field Problems in Terfenol-D Transducers. Sensors 2020, 20, 2808. [Google Scholar] [CrossRef]
- Xing, X.; Kuang, K.; Qin, H. Novel Fiber Bragg Grating Tilt Sensor with High Sensitivity. Acta Opt. Sin. 2022, 42, 0706004. [Google Scholar]
- Wu, H.; Liang, L.; Wang, H.; Dai, S.; Xu, Q.; Dong, R. Design and Measurement of a Dual FBG High-Precision Shape Sensor for Wing Shape Reconstruction. Sensors 2021, 22, 168. [Google Scholar] [CrossRef]
- Xu, M.G.; Archambault, J.L.; Reekie, L.; Dakin, J.P. Thermally-compensated bending gauge using surface-mounted fibre gratings. Int. J. Optoelectron. 1994, 9, 281–283. [Google Scholar] [CrossRef]
- Livingston, J.D. Magnetomechanical properties of amorphous metals. Phys. Status Solidi 1982, 70, 591–596. [Google Scholar] [CrossRef]
- Peng, Z. Demodulation of the Optical Fiber Fabry-Perot Sensor Based on Fourier Transform. Acta Opt. Sin. 2005, 25, 186–189. [Google Scholar]
- Geib, D. Multiplexing of Extrinsic Fabry-Perot Optical Fiber Sensors for Strain Measurements. Master’s Thesis, Virginia Polytechnic Institute and State University, Montgomery, VA, USA, 2003. [Google Scholar]
- Shinpaugh, K.A.; Simpson, R.L.; Wicks, A.L.; Ha, S.M.; Fleming, J.L. Signal-processing techniques for low signal-to-noise ratio laser Doppler velocimetry signals. Exp. Fluids 1992, 12, 319–328. [Google Scholar] [CrossRef]
- Kersey, A.D.; Davis, M.A. Fiber grating sensors. J. Lightwave Technol. 1997, 15, 1442–1463. [Google Scholar] [CrossRef] [Green Version]
- Cranch, G.A.; Nash, P.J. High multiplexing gain using TDM and WDM in interferometric sensor arrays. In Proceedings of the PHOTONICS EAST ‘99, Fiber Optic Sensor Technology and Application, Boston, MA, USA, 19–22 September 1999; pp. 531–537. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| The Size Specifications and Symbol | Quantity | Value |
|---|---|---|
| λ1 | Center wavelength of the FBG1 | 1549.9987 nm |
| λ2 | Center wavelength of the FBG2 | 1549.9954 nm |
| λ3 | Center wavelength of the FBG3 | 1549.9698 nm |
| Pe | Effective elastic optical coefficient of optical fiber | 0.78 |
| E | Elastic modulus of optical fiber | 70 Gpa |
| m | Weight of mass ball | 85 g |
| d | Diameter of fiber | 125 μm |
| g | Gravitational acceleration | 9.8 m/s2 |
| Reference Angle (Deg) | Roll Angle (Deg) | Pitch Angle (Deg) | Heading Angle (Deg) | Angle Deviation (Deg) | |
|---|---|---|---|---|---|
| Northwest | 45.0 | 4.0 | 0 | 46.2 | 1.2 |
| 35.0 | 6.0 | 0 | 36.3 | 1.3 | |
| 25.0 | 0 | 0 | 24.9 | 0.1 | |
| 15.0 | 0 | 0 | 15.1 | 0.1 | |
| 5.0 | 0 | 0 | 5.4 | 0.4 | |
| Northeast | 5.0 | 8.0 | −1.0 | 7.3 | 2.3 |
| 15.0 | 8.0 | −2.0 | 17.0 | 2.0 | |
| 25.0 | 8.0 | −2.0 | 26.1 | 1.1 | |
| 35.0 | 0 | 0 | 35.1 | 0.1 | |
| 45.0 | 0 | 0 | 44.5 | 0.5 | |
| 55.0 | 0 | 0 | 55.0 | 0 | |
| 65.0 | 5.0 | 5.0 | 64.2 | 0.8 | |
| 75.0 | 8.0 | −2.0 | 76.3 | 1.3 | |
| 85.0 | 1.0 | 8.0 | 81.8 | 3.2 | |
| Southeast | 85.0 | 5.0 | 5.0 | 84.1 | 0.9 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, Y.; Xiong, S.; Xia, J. An All-Fiber Optical Sensor Combined with FBG and CFBG-FP for Attitude Estimation. Sensors 2022, 22, 5562. https://doi.org/10.3390/s22155562
Li Y, Xiong S, Xia J. An All-Fiber Optical Sensor Combined with FBG and CFBG-FP for Attitude Estimation. Sensors. 2022; 22(15):5562. https://doi.org/10.3390/s22155562
Chicago/Turabian StyleLi, Yifan, Shuidong Xiong, and Ji Xia. 2022. "An All-Fiber Optical Sensor Combined with FBG and CFBG-FP for Attitude Estimation" Sensors 22, no. 15: 5562. https://doi.org/10.3390/s22155562
APA StyleLi, Y., Xiong, S., & Xia, J. (2022). An All-Fiber Optical Sensor Combined with FBG and CFBG-FP for Attitude Estimation. Sensors, 22(15), 5562. https://doi.org/10.3390/s22155562