1. Introduction
With the development of high maneuvering targets, such as hypersonic aircrafts and missiles, maneuvering target tracking has recently drawn a lot of attention [
1,
2]. During the past few decades, lots of tracking methods have been developed and investigated for maneuvering targets [
3,
4,
5]. Among the existing target tracking approaches, designing an appropriate model for the target maneuvering motion is regarded as an important part of decreasing the tracking errors caused by the model mismatch. Therefore, many maneuver models were proposed, such as constant acceleration (CA) [
6], Singer model [
7], current statistical model (CS) [
8]. In contrast to single model methods, the interactive multiple model (IMM) algorithm [
9,
10] has been widely applied because of its adaptive capability for maneuvering target tracking problems. By mapping the motion mode to a model set, IMM performs the parallel filter for each model. Furthermore, based on the residual information and a priori information, the state estimation results of each model are weighted and synthesized to accurately achieve the maneuvering target tracking. Considering the limited performance of IMM based on the single platform, Wang et al. [
11] proposed a multi-platform maneuvering target tracking algorithm based on IMM and the best linear unbiased estimate filter. Moreover, an adaptive interacting multiple model algorithm based on information-weighted consensus was proposed [
12], which presented better adaptability and accuracy than the classical IMM. To cope with the miss detections and false alarms in a low-observable environment, a state-dependent IMM based on the particle filter was presented [
13]. However, the above IMM algorithms usually use a fixed set of models, so a large number of model sets is required when solving the problem of maneuvering target tracking. To alleviate this problem, the variable structure multiple model (VSMM) method has been proposed [
14]. Furthermore, a VSMM version of the consensus filter was presented [
15], where the expected mode augmentation was introduced to guarantee the model set adaption. In addition, the particle swarm optimization technique was utilized to improve VSMM [
16]. However, for maneuvering target tracking in practice, multiple models cannot fully cover the modes of the target’s motion, which may degrade the tracking performance. Additionally, excessive numbers of models also generate large calculations in many practical applications.
On the other hand, the filtering algorithm is regarded as an important issue to cope with maneuvering target tracking problems. Practically, extended Kalman filter (EKF) [
17] has been widely applied for many nonlinear systems during the past few years. EKF is developed based on the Kalman filter and introduces the first-order Taylor expansion to approximate the nonlinear function. However, the first-order Taylor expansion of EKF cannot, at times, satisfy the tracking accuracy. To this end, other nonlinear filter algorithms including unscented Kalman filter (UKF) [
18,
19] and cubature Kalman filter (CKF) [
20] were proposed. By adopting the unscented transformation and spherical-radial principle, UKF and CKF can achieve second-order accuracy without calculating the Jacobian matrix. In order to further improve the robustness of the conventional filters, the strong tracking filter (STF) was proposed by Zhou et al. [
21,
22]. This algorithm introduces the orthogonal principle of residual sequences into the classical EKF to modify the prediction of the covariance matrix with a time-varying fading factor. When the state estimation of EKF deviates from the actual state, the effect of the old observations on the current filter estimation is reduced using the time-variant fading factor whereas the effect of the new observation is increased [
23]. Accordingly, the robustness and accuracy of the classical EKF were improved. In order to improve the performance of STF, UKF and CKF were introduced to replace EKF [
24,
25]. An adaptive strong tracking particle filter algorithm was established by combing STF and the particle filter (PF), which demonstrated that the proposed method could provide better tracking precision than the classical methods [
26]. Since the traditional strong tracking filter only considers the first-order Taylor expansion, a fast-strong tracking CKF was proposed [
27], which expanded the number of fading factors from one to two. Sequentially, it extracted the third-order term information and achieved second-order accuracy. To implement higher tracking accuracy for the maneuvering target tracking, many improved strong tracking cubature Kalman filter (STCKF), such as strong tracking spherical simplex-radial CKF [
28], fifth-degree STCKF [
29], Bayesian-based strong tracking interpolatory CKF [
30], model-based strong tracking square-root CKF [
31], have recently been proposed. In addition, Ma et al. [
32] added STF into the sub-filter of IMM to overcome the low tracking accuracy when dealing with maneuvering situations. However, in practical applications, it is found that the detection and tracking ability of the STF method will be reduced when the maneuver of the target is small. As is known, the residuals of range measurements are usually much bigger than the residuals of azimuth angle and elevation angle measurements, which leads STF to different sensitivities of different residual components. To this end, Jiang et al. [
33] proposed a residual-normalized strong tracking filter (RNSTF) by designing the weight of the residual components. However, the process noise is not considered.
The aforementioned algorithms adopt the innovation, also known as the predictive residual, to realize maneuver detection and compensation, because the innovation will increase significantly when the model mismatch is caused by the unknown maneuver. However, the sensor signal may be disturbed or blocked due to the influence of a harsh environment, making the statistical characteristics of measurement noise uncertain and time varying. Inaccurate a priori measurement noise covariance can also lead to increased innovation. In that case, the aforementioned algorithms are too sensitive to inaccurate measurements, leading to filter divergence. To solve the problem of inaccurate a priori knowledge, several adaptive Kalman filters (AKF) with noise sensing capability were established [
34,
35]. Unfortunately, the existing methods only can achieve the second-order estimation accuracy [
36,
37], and the adaptive KF cannot distinguish between model mismatch and inaccurate a priori measurement noise. In addition, adaptive KFs use the innovation to adjust the process noise and measurement noise simultaneously, which leads to poor stability.
Inspired by the strong representation capability of neural networks [
38,
39], several filters based on reinforcement learning have been studied. Hu et al. [
40] designed an attitude estimator by combining Lyapunov’s method and the deep reinforcement learning algorithm. Tang et al. [
41] combined the classic EKF with the deep reinforcement learning algorithm to realize the attitude estimation of the navigation system, which introduced a gain matrix of the residual and took it as the action to learn. Gao et al. [
42] proposed an adaptive Kalman filter based on the deep deterministic policy gradient (DDPG) algorithm for ground vehicles, which took the integrated navigation system as the environment to obtain the process noise covariance matrix estimation. However, this adaptive filter takes the change in noise vector as the action to learn, resulting in poor filter stability. Additionally, the process noise covariance matrix of Inertial Navigation System (INS) error model will not experience a great change because it represents the inherent performance of the inertial sensor [
42], which is different from the target tracking problem.
Motivated by the above investigation, a noise-adaption EKF is proposed in this paper to address the problem of maneuvering target tracking. Based on multiple synchronous sensors, the maneuver detection is constructed by utilizing Dempster-Shafer (D-S) evidence theory [
43] to achieve the fused detection of multiple sensors. A Markovian decision process with a proper reward function is modeled for the adaptive estimation of the process noise covariance, and DDPG is designed to learn the compensation factor and feed it into EKF so that the improved filter can adaptively cope with the unknown maneuver. If the detection declares the occurrence of inaccurate measurement noise, the recursive measurement noise estimation is applied to the corresponding sensor. Finally, the local estimations are fused to obtain the target’s global estimation. When the unknown maneuver and mismatched measurement noise emerge, the proposed filter can correct noise covariance adaptively. Distinct from the aforementioned algorithms, the proposed filter avoids the simultaneous adjustment of process model and measurement model without distinction, which effectively improves the robustness of the filter. Moreover, the application the deep deterministic policy gradient method in solving maneuver target tracking problems is explored in this paper.
The remainder of this paper is organized as follows:
Section 2 introduces mathematical models and the formula of EKF.
Section 3 provides the maneuver detection based on D-S evidence theory in detail, and the framework of the noise-adaption EKF is presented. In
Section 4, the process noise adaption based on DDPG is designed. Moreover, the recursive measurement noise estimation and the fusion algorithm are completed. Finally, simulation results and conclusions are shown in
Section 5 and
Section 6, respectively.
2. Problem Formulation
The process model of the target is given by
where
denotes the index of discrete-time.
represents the state vector, and
is the state transition function. The process noise
is assumed to be zero-mean Gaussian white noise with the covariance matrix
.
The measurement model of sensors can be represented as
where
is the measurement vector, and
is the measurement mapping function.
is the measurement noise, whose covariance matrix is
.
Since EKF has the advantages of simple algorithm and fast convergence, it has been widely applied in nonlinear systems [
17]. Specifically, EKF can be divided into two stages. The first stage is the one-step prediction based on the process model
where
is the state estimation and
is the covariance matrix,
and
are the corresponding predictions. The state transition matrix
is defined as the first-order Taylor expansion of the state transition function.
The second stage is the one-step update based on the measurement. The state vector and its covariance matrix are updated as
where
is the gain matrix, and
is defined as
As the main prior information of the system, the process noise and the measurement noise are of great significance to the estimation performance and stability of the filter. and represent the confidence degree in models and measurements, respectively. If and are smaller than the true noise distribution, the uncertainty range of the true state is too narrow, resulting in estimation bias. Conversely, if and are larger than the true noise distribution, it may lead to filter divergence. Additionally, inaccurate and can impair the estimation accuracy.
3. Maneuver Detection and the Framework
3.1. Maneuver Detection Based on D-S Evidence Theory
The key to maneuver detection is to design an appropriate detection strategy to detect the target’s maneuver precisely and timely. As stated in the introduction, the detection depending on the innovation from single-source information is not reliable. To improve the accuracy of the maneuver detection, the maneuver detection with a sliding-window structure based on D-S evidence theory is proposed in this section by introducing multiple synchronous sensors’ information.
D-S evidence theory is a fusion rule established on a nonempty finite space, which includes a limited number of subsets [
43]. Through independent observations by sensors, it can fuse observation results and give a joint judgment to improve the confidence and accuracy of events. D-S evidence theory can combine the evidence more intuitively and easily, and it has the expression ability of unknown and uncertain situations by calculating the probability of the set of multiple events.
Consider all the subsets of the finite space
as
, including
and an empty set
, and define the map
:
, for
, it satisfies
where the map
is called the basic probability assignment function.
is called the mass function of
, which indicates the degree of confidence for
according to the current observation.
For the problem of maneuvering target tracking, the target has two movement modes: maneuver or not, so there are two events in the maneuver detection problem: “Maneuver” and “Normal”, denoted as
,
, respectively. However, when the degree of confidence tends to zero, unreasonable fusion results will be obtained, which is always called as Zadeh paradox [
43]. To avoid the Zadeh paradox, one more event “uncertainty” is added, denoted as
, and its confidence degree is set to 0.01.
Suppose there are
sensors applied in the target’s measurement mission, denoted as
, and the measurement of
at time
is
. The innovation is defined as the difference between actual measurement value and predictive measurement value.
where
is the predictive measurement. The innovation satisfies
Following this, the detection variable is constructed based on the innovation.
Since the innovation is subject to Gaussian distribution, the detection variable is supposed to be subject to
distribution with
degree of freedom, where
is the dimension of the innovation vector. Therefore, the maneuver probability is defined as
It can be seen from Equation (16) that, the innovation is considered to be entirely caused by the unknown maneuver, hypothetically. The increase in the innovation indicates bigger maneuver probability.
Based on the definition of the maneuver probability, the mass function of
is given as
As mentioned above, the mismatch between the real measurement noise and a priori measurement noise can also lead to the innovation’s increase. As a result, the maneuver probability determined by the innovation is unreliable. A joint detection mechanism is developed by fusing maneuver detection results of multiple synchronous sensors to improve the accuracy and reliability of the maneuver detection. For
independent pieces of evidence with
events, the fused mass function of
can be merged by D-S evidence theory as follows
where
in this paper.
Similarly, the fused mass function of and can be acquired, denoted as and , respectively. If , it means that the target is detected to be maneuvering according to the fusion of multiple sensors at time . Conversely, the target is not maneuvering when , and the mismatch of the a priori measurement noise is the main reason for the increased innovation.
However, the maneuver detection based on the current time is unstable. Furthermore, the sliding window structure is introduced into the maneuver detection to improve the stability of detection, where the detection depends not only on the current state but also on the neighboring states.
The size of the sliding window is set as , and the final mass function can be calculated by
Similarly, the final mass function and can be obtained. According to the fused detection result, there are three conditions of the tracking problem. (a) When , the target is detected to be maneuvering, and the adaptive process noise estimation needs to be introduced to deal with unknown maneuvers. (b) If and , the target is not maneuvering, and the mismatch of measurement noise emerges, so the measurement noise adaption of is necessary. (c) There are no above two conditions when and , so EKF can cope with the target tracking task.
3.2. The Framework of the Noise-Adaption EKF
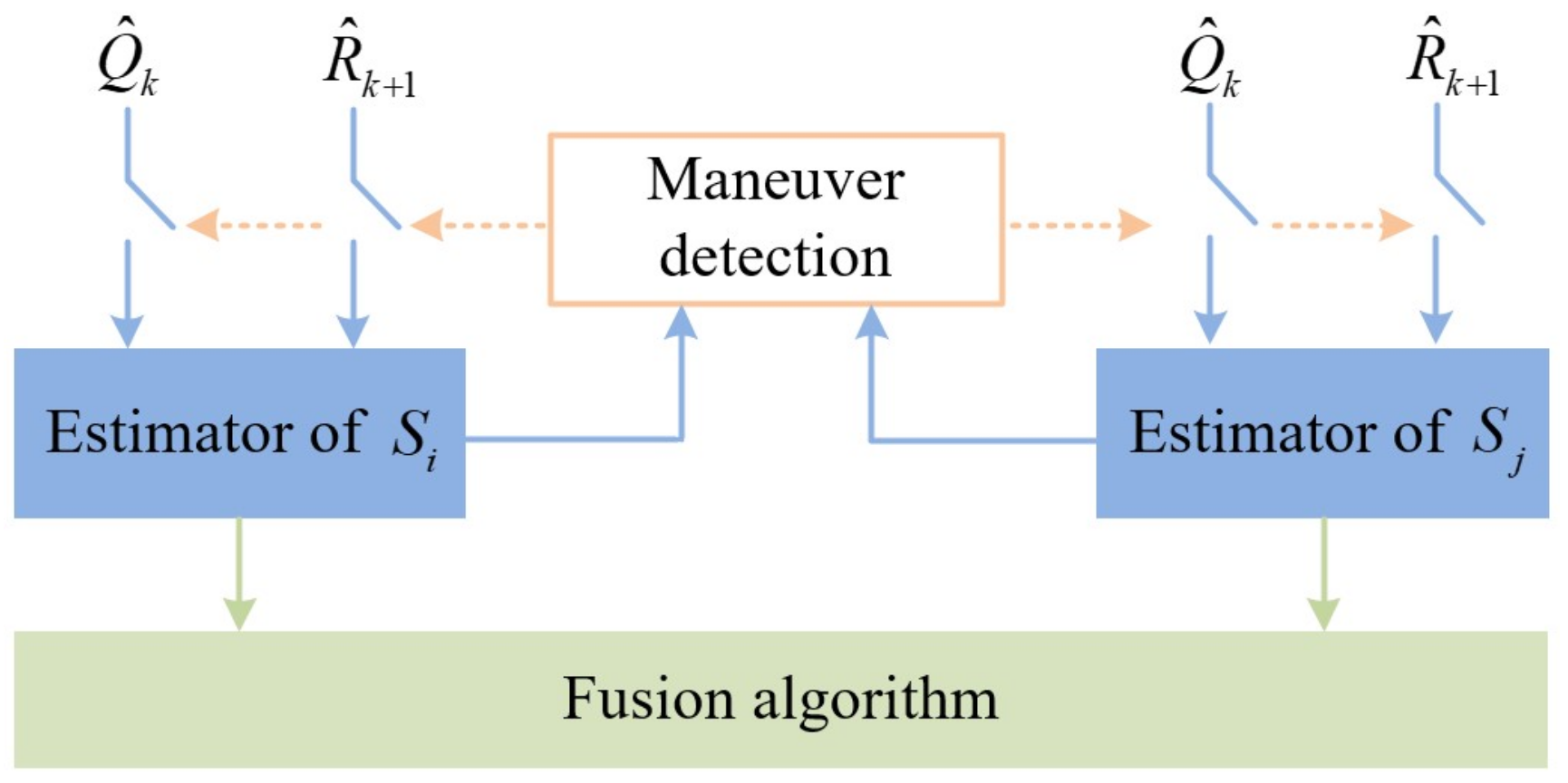
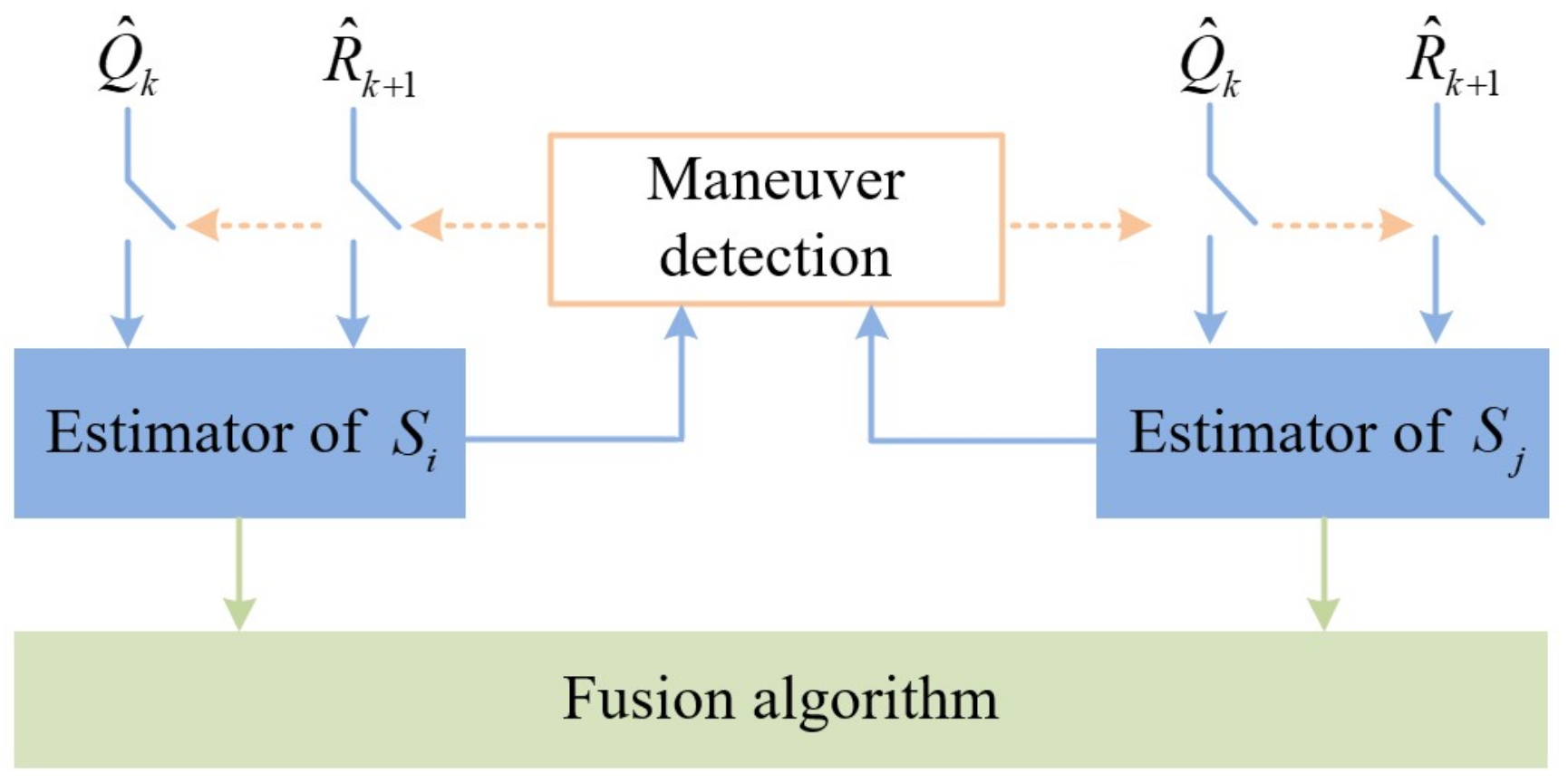
Based on the above maneuver detection, a noise-adaption EKF is proposed to adaptively cope with the unknown maneuver and inaccurate measurement noise. The framework of the proposed filter is shown in
Figure 1.
To achieve the accurate compensation for unknown maneuvers and the inaccurate measurement noise covariance, multi-sensor information undergoes the maneuver detection. Whether or not the process noise adaption or the measurement noise adaption proceeds is determined by the maneuver detection. If the target is detected to be maneuvering, the adaptive process noise is calculated by DDPG and introduced into the filter to cope with the model mismatch caused by the unknown maneuver. If the inaccurate measurement noise covariance is detected to be the main reason for the innovation’s increase, the recursive measurement noise estimation is applied to the corresponding sensor. Sequentially, the local estimations are fused to obtain the global estimation of the target. When the unknown maneuver or mismatched measurement noise emerge, the proposed filter can estimate the maneuvering target’s state with high performance.
4. Noise-Adaption EKF for Maneuvering Targets
4.1. Process Noise Adaption Based on DDPG
For the problem of maneuvering target tracking, the main task is to find a tracking strategy to estimate the target’s station rapidly and accurately. However, the accurate mathematical models of non-cooperative targets cannot be obtained. When the target is maneuvering, the estimation error increases due to the model mismatch. To cope with the unknown maneuver, an effective method is to adaptively estimate the process noise covariance online. To this end, a process noise adaption method based on DDPG is proposed in this section. Through its self-learning and optimization capabilities, DDPG algorithm can adaptively cope with the unknown maneuver.
DDPG is known as one of the reinforcement learning algorithms for the continuous action strategy. The interactive learning process of DDPG is formalized as the Markov decision process (MDP), which can be defined by four elements: the state
, the action
, the reward
, and the state transition probability
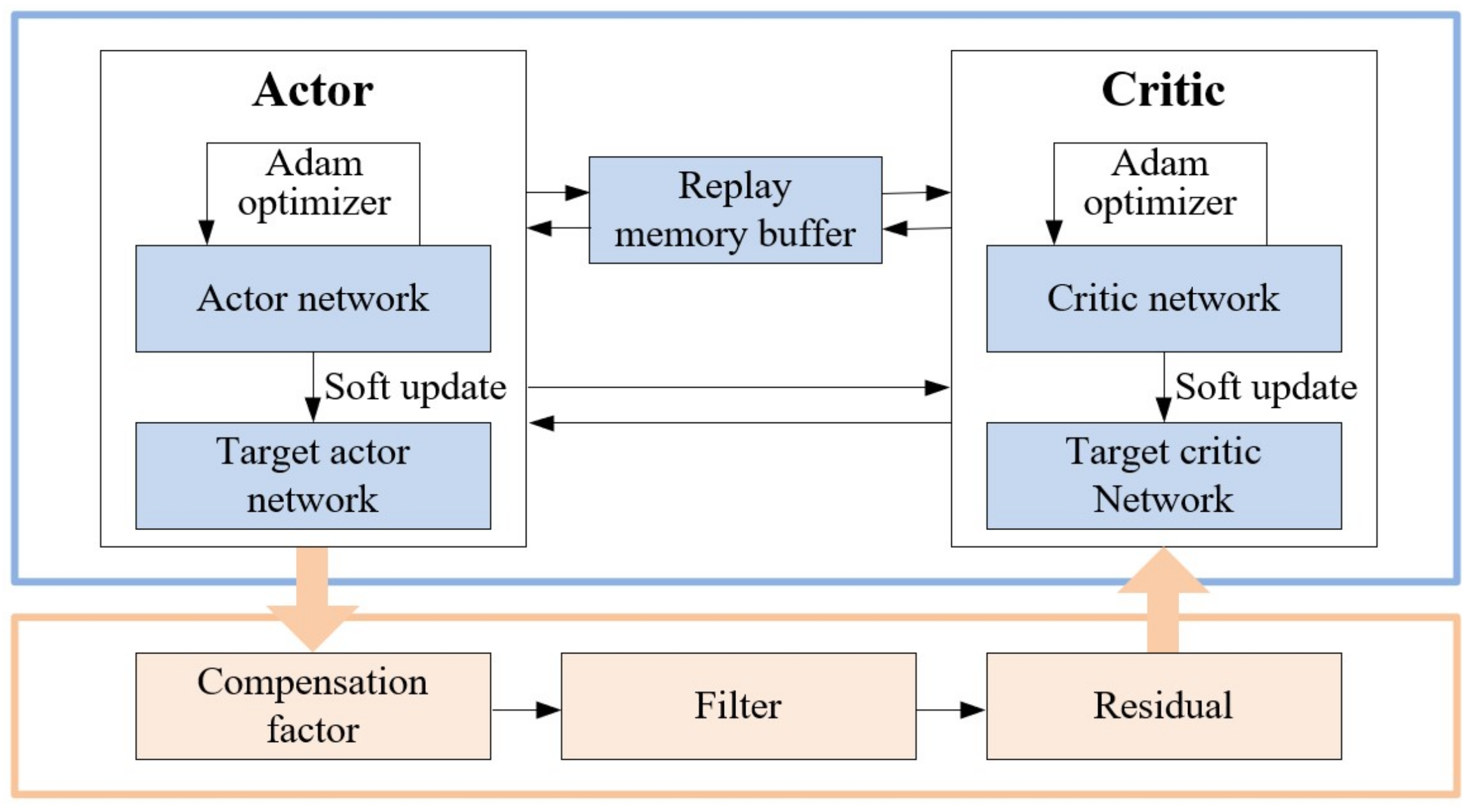
. The framework of DDPG is shown in
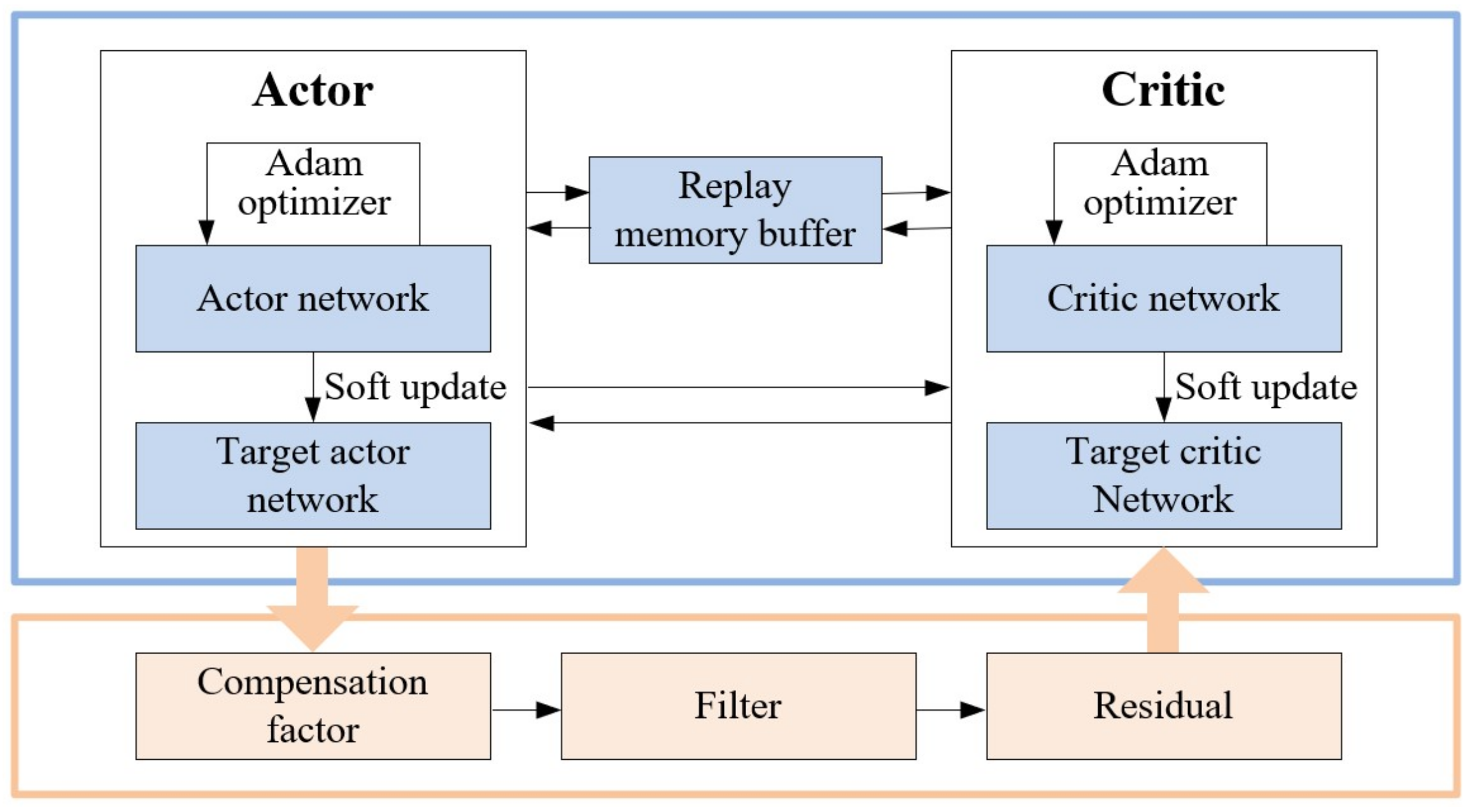
Figure 2. The agent generates an action to interact with the environment at first, and then under the joint effects of action and environment, a new state is generated, and the environment gives a reward to the critic. Afterwards, the critic calculates the action-value function to evaluate the given policy, then the action policy is further optimized according to the evaluation results.
The adaptive estimation of the process noise covariance is defined as
where
is the adaptive process noise covariance, and its initial value is the a priori process noise covariance matrix.
is the compensation factor. This adaptive estimation form is more robust due to fewer parameters.
Correspondingly, the prediction of the covariance matrix in Equation (4) is updated as
Following by this, the problem of designing the maneuvering tracking strategy is transformed into the determination of the compensation factor, which can be described as an MDP. DPPG algorithm is designed to learn the compensation factor, so the action is defined as
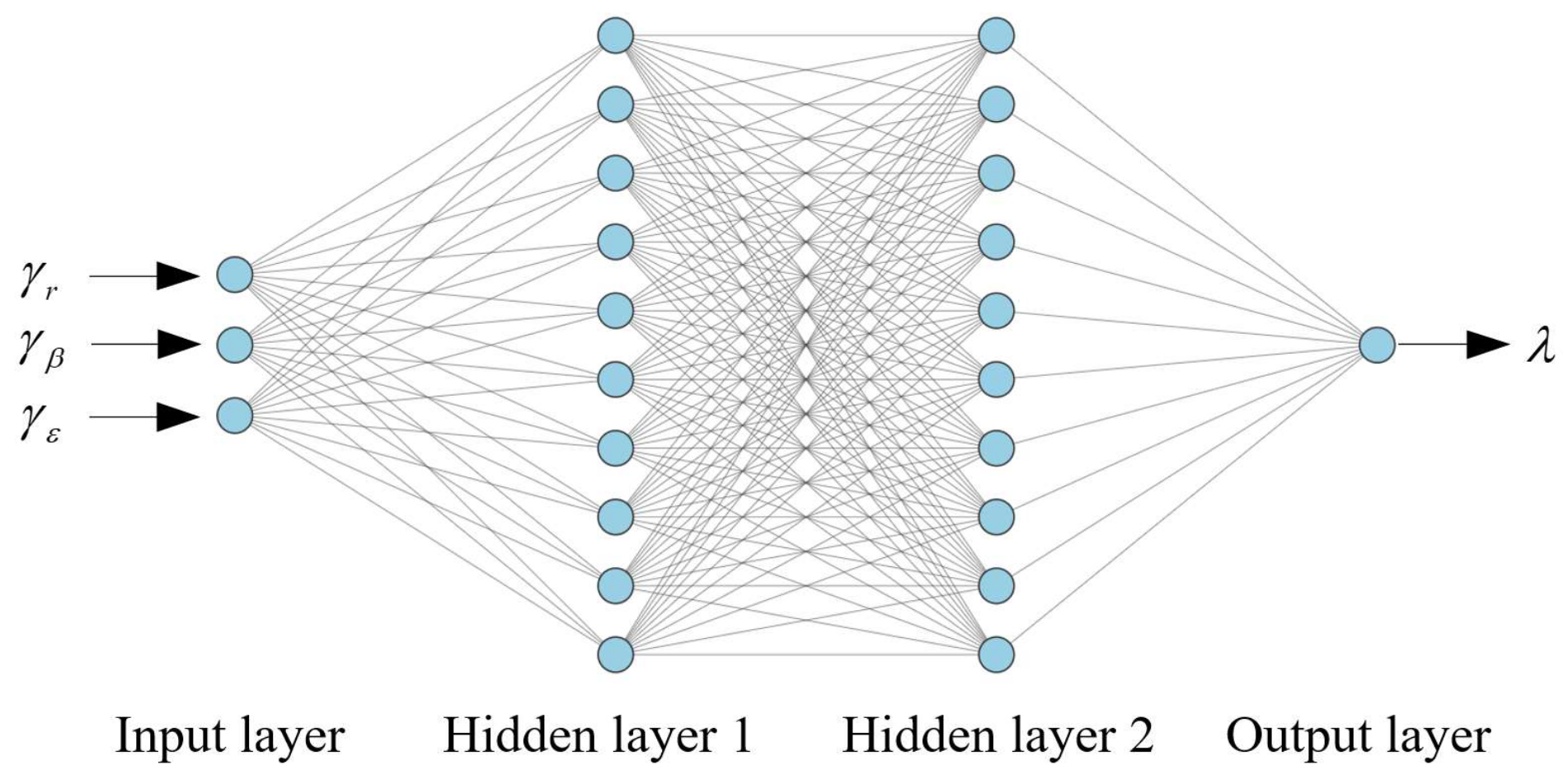
The innovation reflects the degree of model mismatch. The larger the innovation, the larger the model error, and the compensation factor needs to be increased accordingly. Therefore, the agent state is defined as the filter’s innovation in Equation (12), which contains three-dimensional innovation: range, azimuth angle and elevation angle, i.e.,
When the environment, i.e., the filter, receives an action, a sufficient reward mechanism is required to evaluate the filter performance under the current action. Therefore, the filter residual is taken as the evaluation index, which is expressed as
In practice, the residuals of range measurements are usually much bigger than the residuals of azimuth angle and elevation angle measurements in practice, which leads to different sensitivity to different residual components. To make the filter equally sensitive to residual elements, a weighting matrix
is introduced for normalizing the residuals.
where
,
, and
represents the measurement errors’ standard deviation of range, azimuth angle, and elevation angle, respectively.
Therefore, the reward function is established as follows
where
is the trace operation.
In DDPG algorithm, two neural networks including the actor network and the critic network, are utilized to approximate the action function and the action-value function. Denote as the action function, which is parameterized by . It maps from state to action, i.e., . Moreover, the action-value function is denoted as , which is parameterized by . Additionally, to enhance the convergence of training, one target actor network and one target critic network are introduced into DDPG, denoted as and , respectively.
The optimal action policy is realized by maximizing the expected total reward
The expected total reward is defined as
Therefore, the actor function is optimized toward the gradient of the expected total reward
Similarly, the action-value function is optimized by minimizing the loss function
The temporal difference error
is utilized to establish the loss function
where
is the reward, and
is the discounting factor.
The actor-value function is optimized toward the gradient of the loss function
To improve the stability in the DDPG training process, there is a replay memory buffer to store the training samples. At every training step, training samples with a size are utilized to train the actor and critic networks. The current transition experience will be added into the buffer to replace the oldest one.
The actor network is updated by the Adam optimizer
Similarly, the critic network is updated using the negative gradient of the loss function
At the end of each sample training, the two target networks are soft updated as
where
is the updating rate.
The implementation framework of the adaptive estimation of process noise based on DDPG is shown in
Figure 3.
The process noise adaption based on DDPG is summarized in Algorithm 1.
| Algorithm 1 The process noise adaption based on DDPG |
| 1 Initialize the parameters of the actor network and critic network |
| 2 Initialize target networks by copying the actor and critic network |
| 3 Initialize the replay memory buffer |
| For each episode, perform the following steps |
| 4 Initialize the estimation state and its covariance matrix |
|
For each timestep, perform the following steps |
| 5 Generate an action based on the actor network and the current state , where the random noise is generated by Ornstein-Uhlenbeck process |
| 6 Execute the action, i.e., the compensation factor in the filter to obtain a new state and a new reward |
| 7 Store the sample in the buffer |
| 8 Randomly select samples from the buffer |
| 9 Calculate the temporal difference error of each sample |
|
|
| 10 Calculate the policy gradient |
|
|
| 11 Update the actor network by Adam optimizer: |
|
|
| 12 Update the critic network |
|
|
|
|
| 13 Update the two target networks by soft update |
|
|
|
|
|
End timestep |
| End episode |
4.2. Recursive Measurement Noise Estimation
When the sensor’s maneuver detection result is inconsistent with the fused maneuver detection result, the corresponding sensor’s measurement model is considered not to match a priori knowledge. In this case, the adaptive estimation method based on DDPG is no longer applicable to deal with it. Since the target is non-cooperative, the deviation between the process model and the actual model exists, so it is difficult to realize the optimal estimation of measurement noise in a similar way to the adaptive estimation of process noise. To modify the measurement noise adaptively, the recursive estimation of measurement noise is introduced [
34].
The estimation of
can be obtained by maximizing the a posteriori density function, which is given by
The residual can be represented as
Substitute Equation (42) into Equation (41), yields
The expectation of the measurement noise can be expressed as (the detailed derivation can be found in the appendix of [
34].)
The statistical residual covariance is calculated as the variance of historical residual sequence
Accordingly, to approximate the real measurement covariance, the modified measurement covariance is updated as the following recursive form
where
is the weighting factor, and
is a fading factor. The initial value of
is the a priori measurement noise covariance matrix.
Therefore, the gain matrix in Equation (6) is replaced as
By modifying the measurement covariance, the gain matrix is adjusted, then the impact of inaccurate a priori measurement noise is reduced.
4.3. Fusion Algorithm
The local estimations from multiple sensors are fused in this section. Since the cross-covariance matrixes of different sensors are unknown, the fault-tolerant generalized convex combination algorithm (FGCC) [
44] based on information theory is introduced in this section.
For two local estimations
and
, the fusion rule of FGCC is
where
and
are corresponding covariance matrices,
and
are the weighting parameters, and the
is an adaptive parameter constructed as
In the above equation,
is the Shannon entropy, and
is the symmetrized Kullback-Leibler distance between two distributions known as J-divergence.
where
is the number of state vector dimensions, and
is the Kullback-Leibler divergence.
where
,and
.
The weights can be determined by the following equation
Obviously, the above algorithm can only be applied to the fusion of two local estimations. In order to improve the applicability of the fusion algorithm, an extended fault-tolerant generalized convex combination algorithm (EFGCC) is developed, which provides the general fusion rule for .
Suppose there are
local estimations
and corresponding covariance matrices
. The fusion form of EFGCC is given as
where the adaptive parameter
is updated as
The definitions of the Shannon entropy and the symmetrized Kullback-Leibler distance are the same as above. The weighting parameter
can be determined by the following equation
where
By the fusion rule of Equation (57), the global estimation for maneuvering targets is realized.









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}