
Calculation of an Average Vehicle’s Sideways Acceleration on Small Roundabouts



Abstract
:1. Introduction
2. Literature Review
3. Materials and Methods
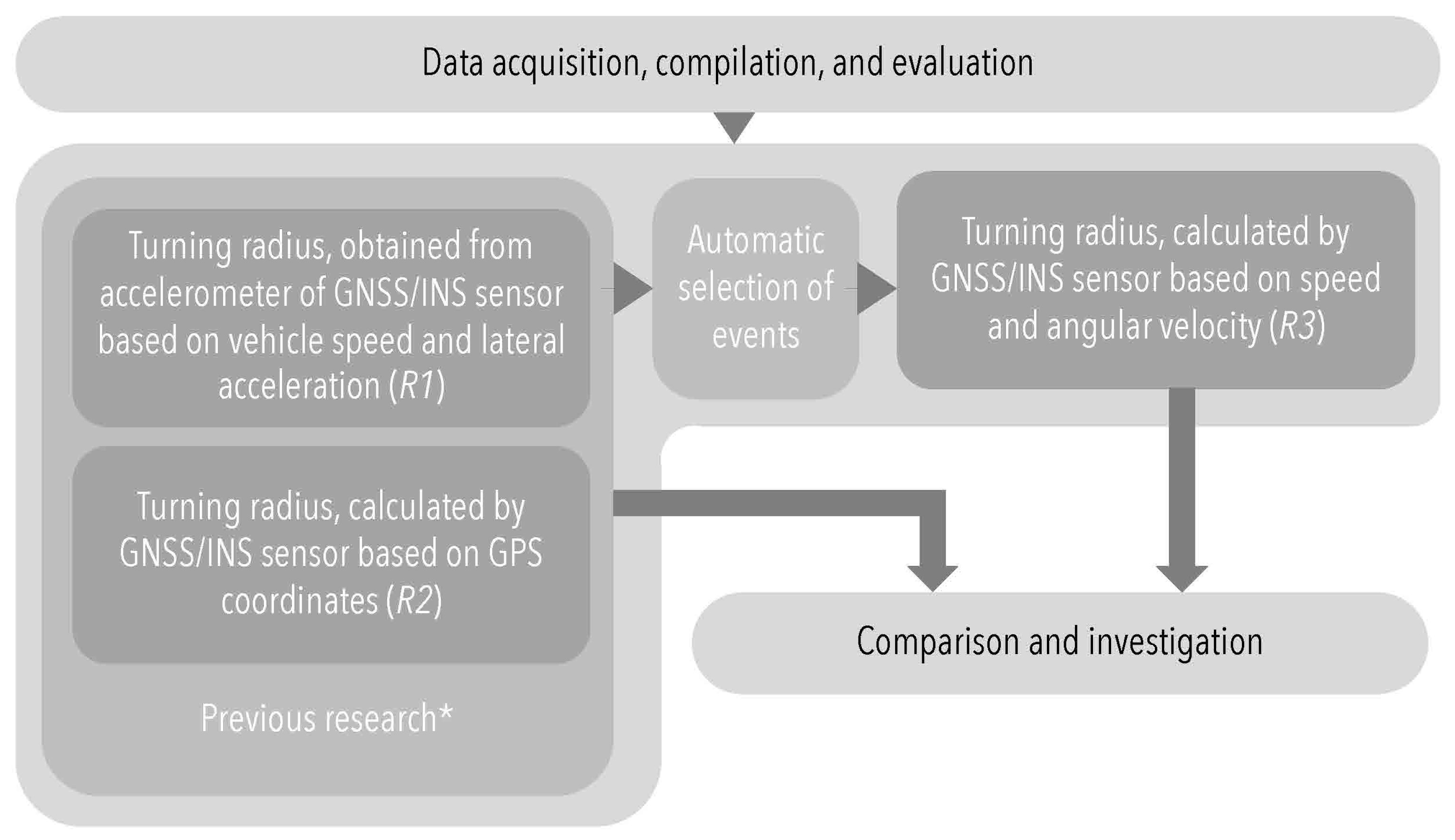
3.1. Data Evaluation
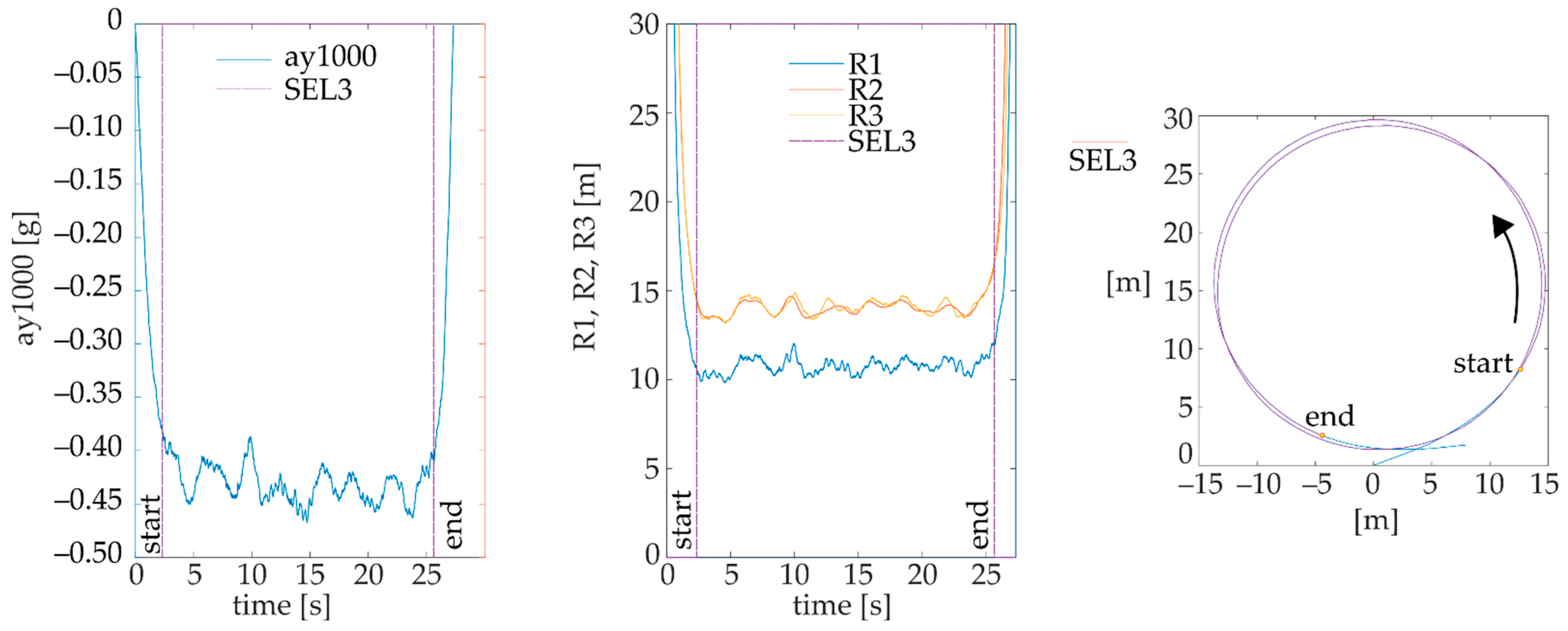
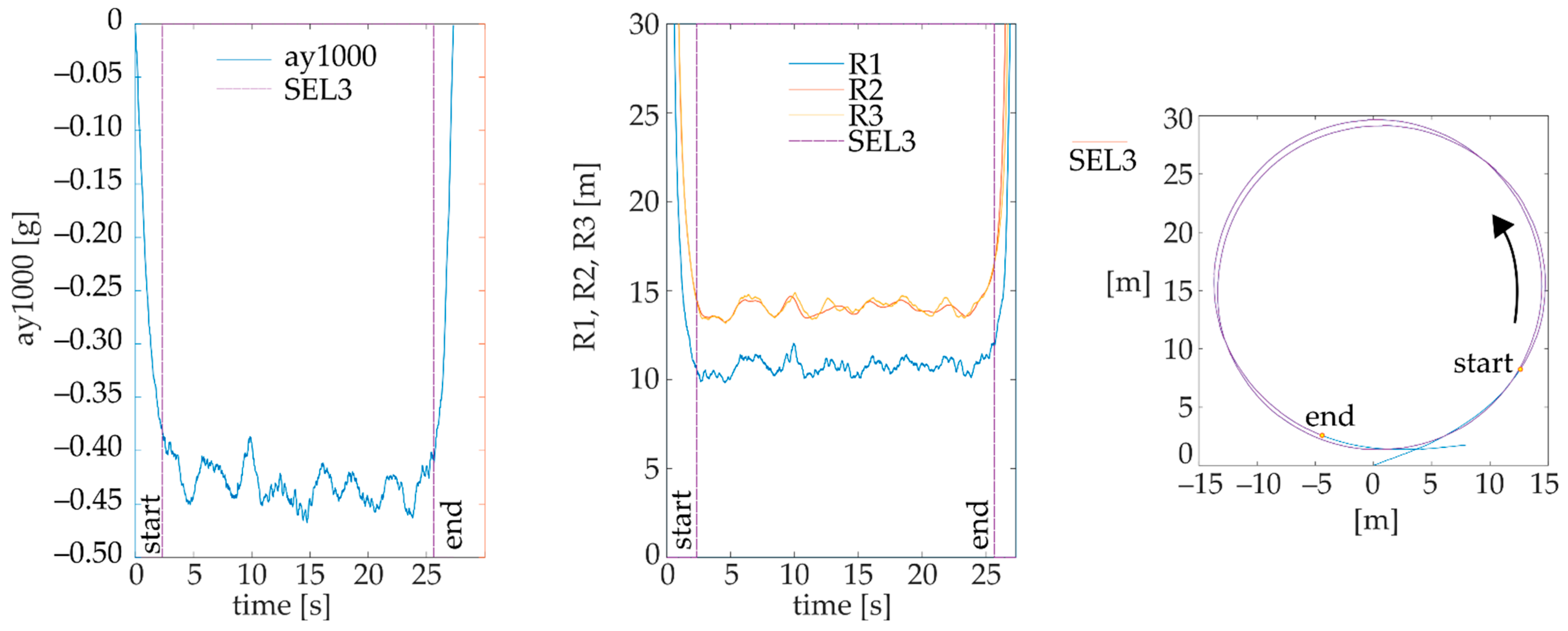
3.2. Automatic Selection of Events Based on Coefficient of Variation of (SEL3)
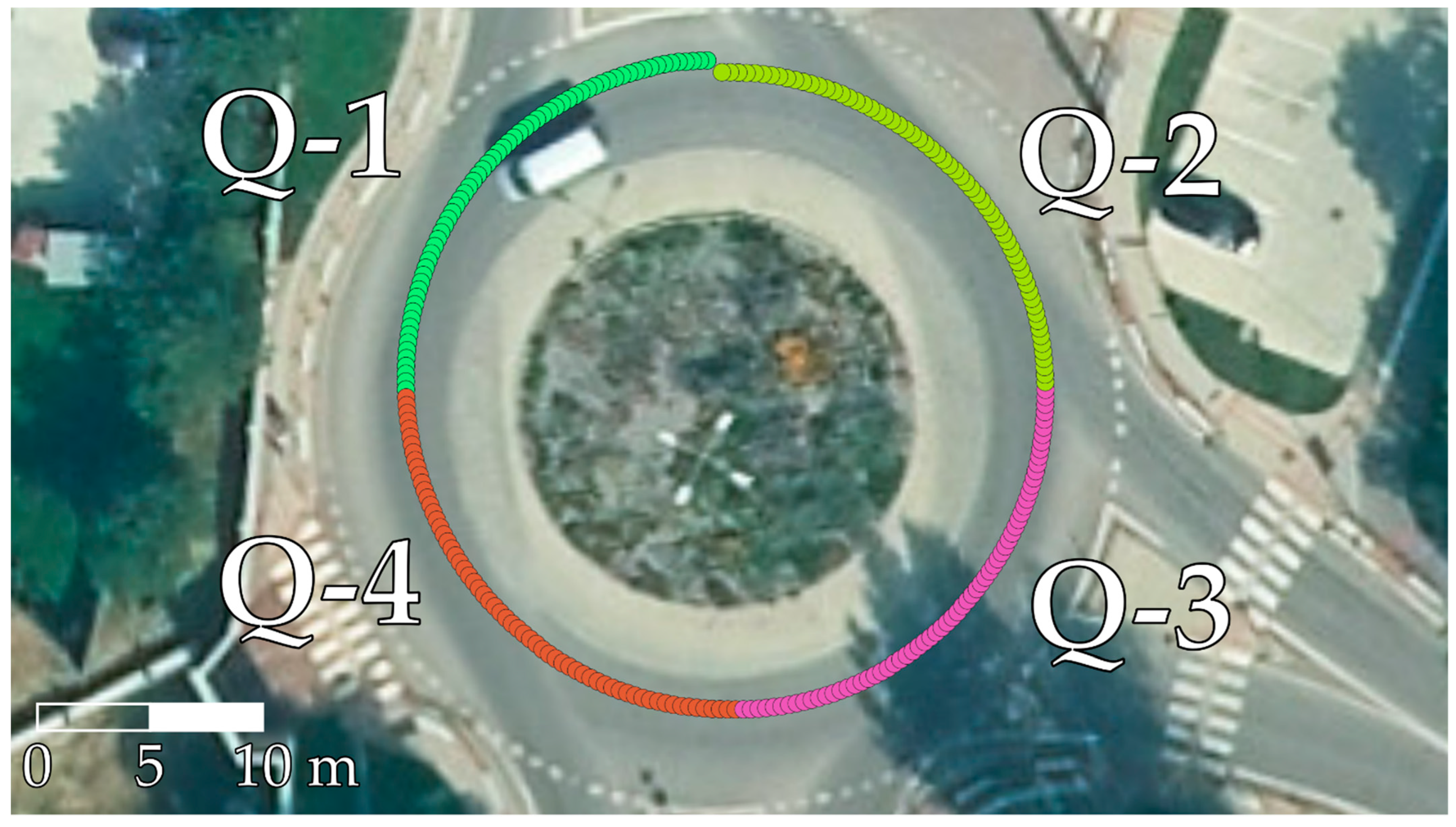
3.3. Automatic Identification of Roundabout Quadrants Based on Yaw
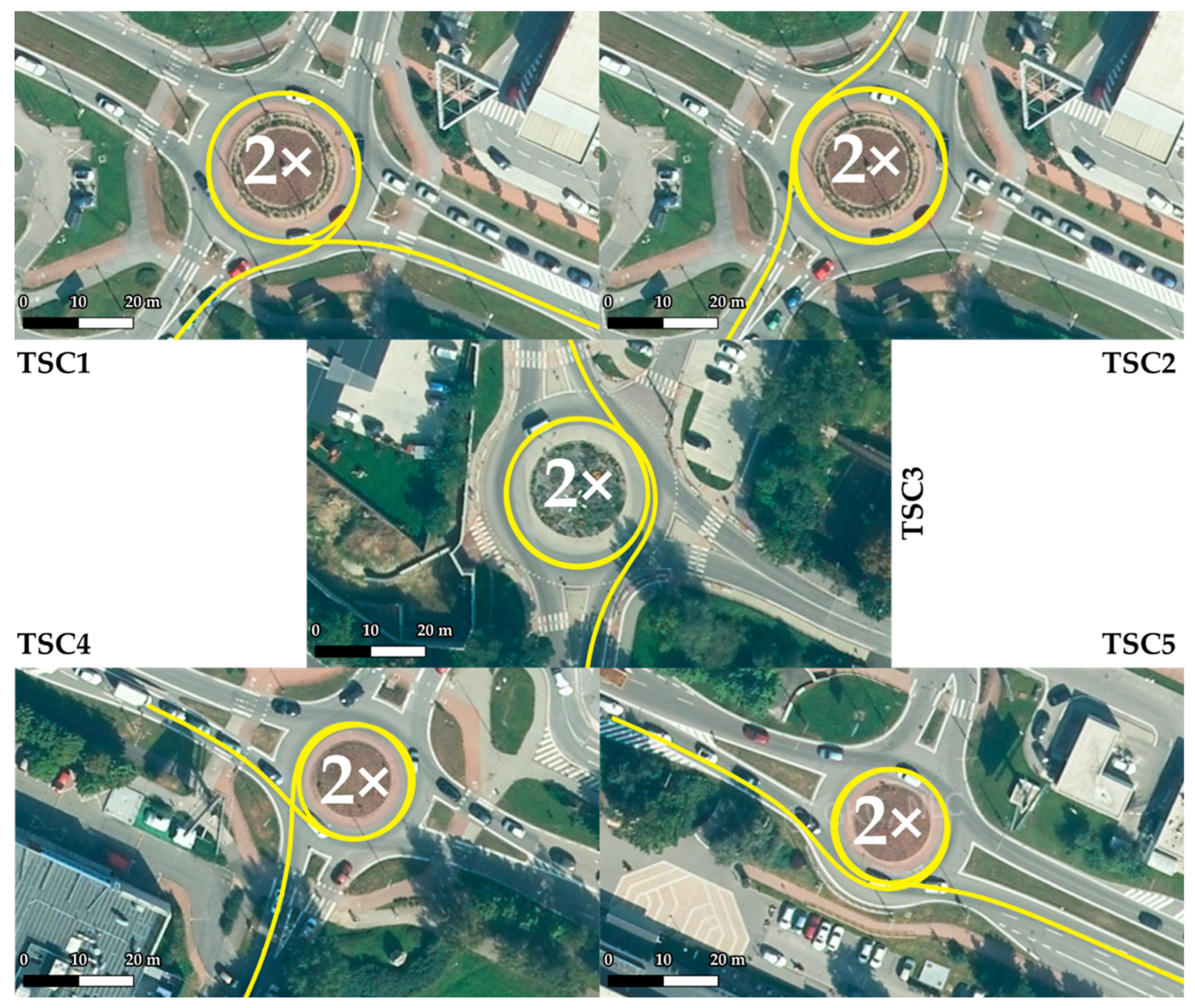
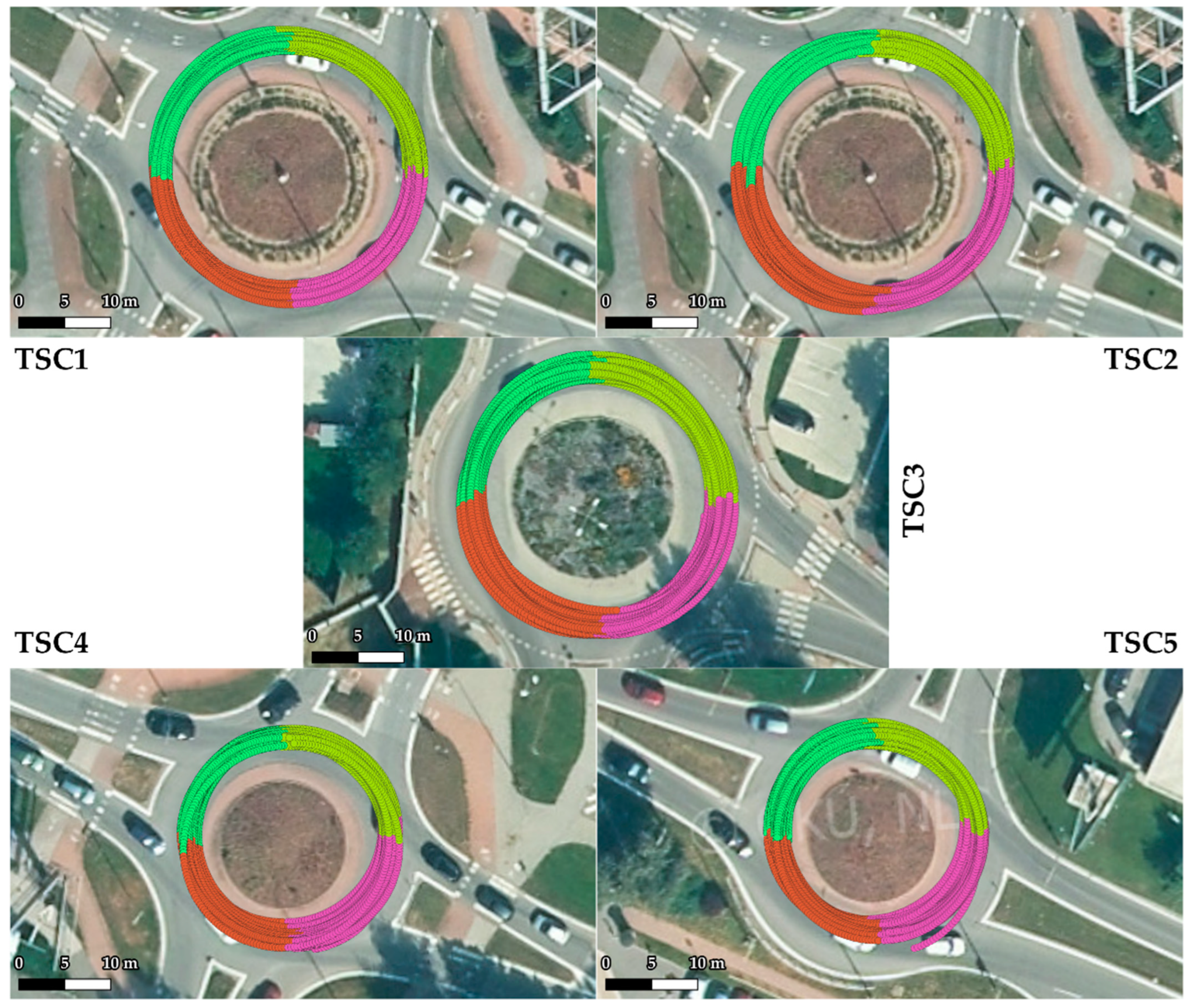
3.4. Roundabout Testing Scenarios
3.5. Statistical Investigation of Data
- A1: There is a statistical difference between vehicle types within each data cluster.
- A2: If we test individual roundabout quadrants instead of the entire roundabout, we will obtain different results compared to A1.
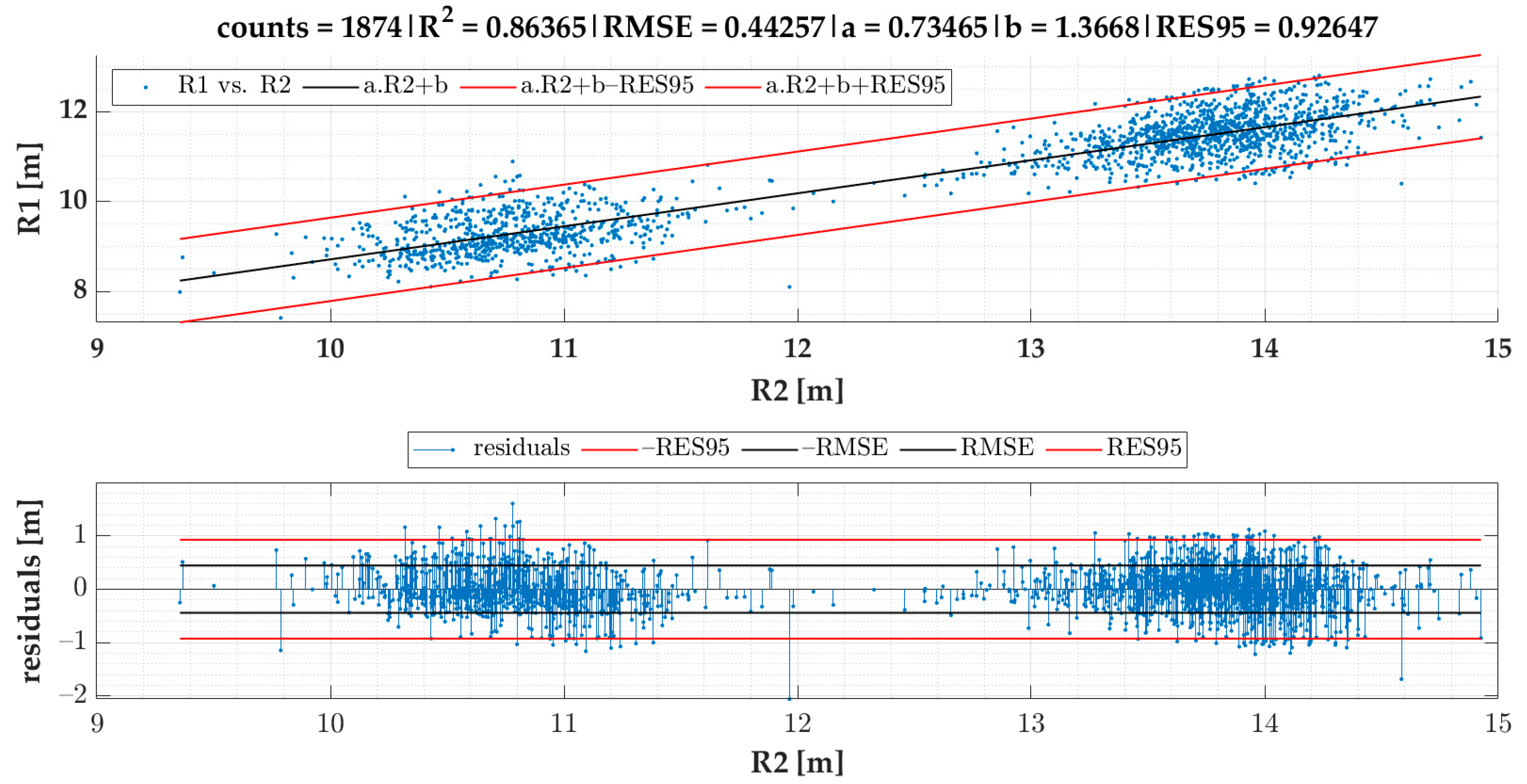
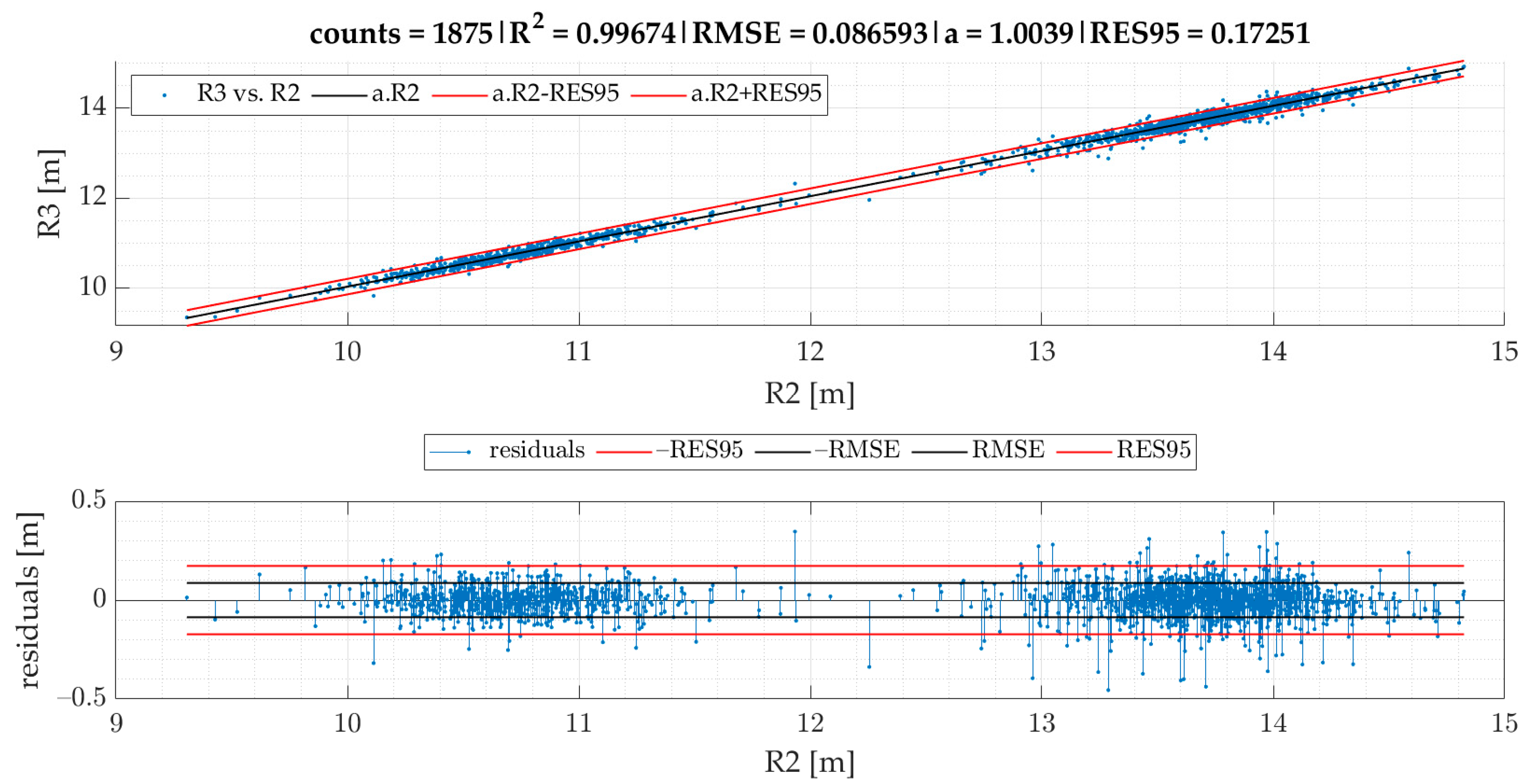
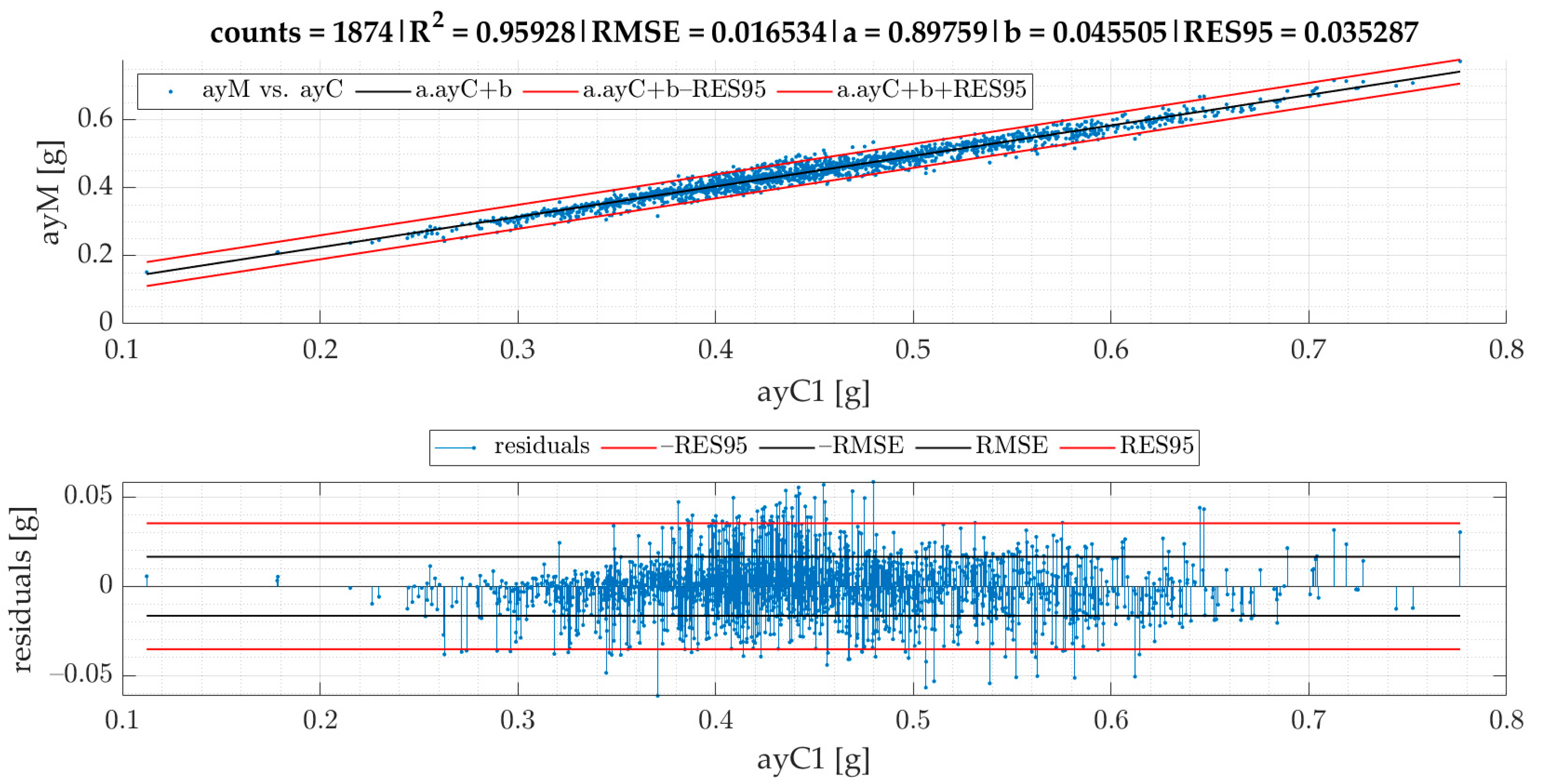
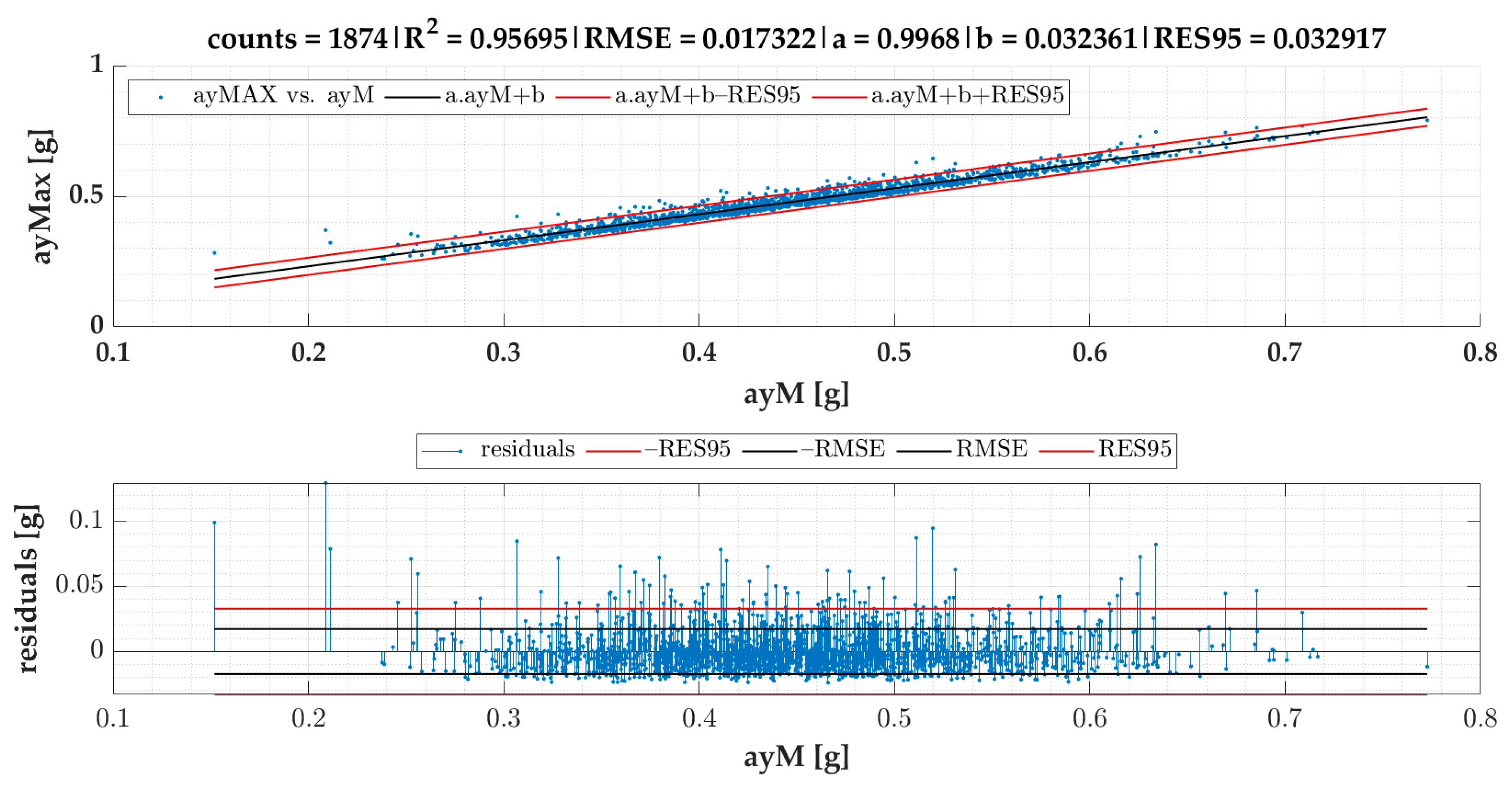
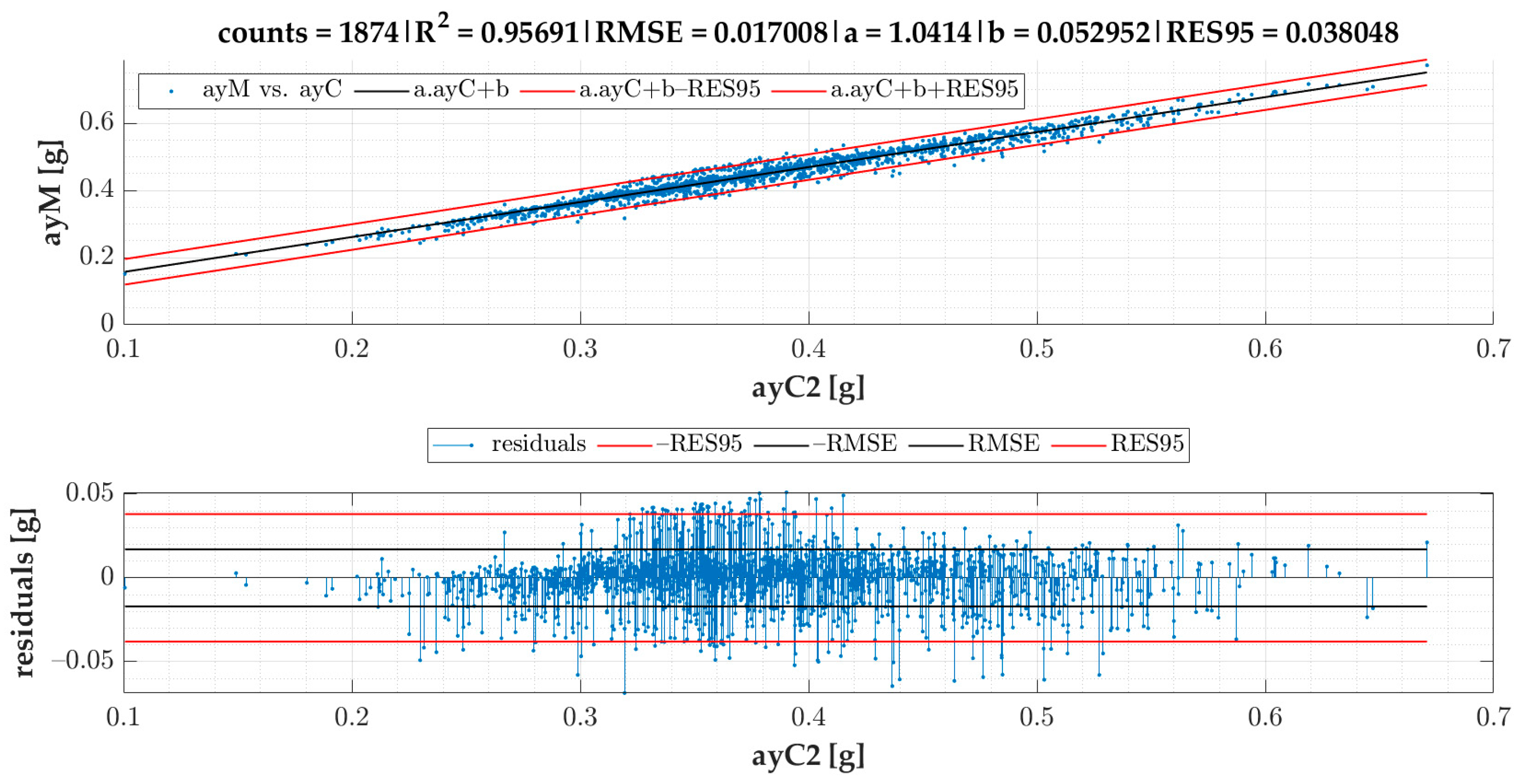
- Mean squared error (MSE): measures the quality of the prediction model based on Euclidean distance. The square root of MSE (RMSE) has the same units as an estimated variable [35].
- R2: the coefficient of determination. It measures the goodness of fit of a prediction model.
- RES95: corresponds to the 95th percentile of the absolute value of residuals (errors).
4. Results
5. Discussion
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Conflicts of Interest
References
- Jagelčák, J.; Gnap, J.; Kuba, O.; Frnda, J.; Kostrzewski, M. Determination of Turning Radius and Lateral Acceleration of Vehicle by GNSS/INS Sensor. Sensors 2022, 22, 2298. [Google Scholar] [CrossRef] [PubMed]
- Šurdonja, S.; Dragčević, V.; Deluka-Tiblja, A. Analyses of maximum-speed path definition at single-lane roundabouts. J. Traffic Transp. Eng. 2018, 5, 83–95. [Google Scholar] [CrossRef]
- Elvik, R. Effects on road safety of converting intersections to roundabouts: A review of evidence from non U.S. studies. Transp. Res. Rec. 2003, 1847, 1–10. [Google Scholar] [CrossRef]
- Jensen, S.U. Safety effects of converting intersections to roundabouts. Transp. Res. Rec. 2013, 2389, 22–29. [Google Scholar] [CrossRef] [Green Version]
- Retting, R.A.; Persaud, B.N.; Garder, P.; Lord, D. Crash and injury reduction following installation of roundabouts in the United States. Am. J. Public Health 2001, 91, 628–631. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Kennedy, J.V.; Peirce, J.; Summergrill, I. International comparison of roundabout design guidelines. In Proceedings of the 3rd International Symposium on Highway Geometric Design, Chicago, IL, USA, 29 June–1 July 2005; Transportation Research Board: Washington, DC, USA. [Google Scholar]
- Sun, Q.C.; Xia, J.C.; Foster, J.; Falkmer, T.; Lee, H. Pursuing Precise Vehicle Movement Trajectory in Urban Residential Area Using Multi-GNSS RTK Tracking. Transp. Res. Procedia 2017, 25, 2356–2372. [Google Scholar] [CrossRef]
- Pilko, H.; Brčić, D.; Šubić, N. Study of vehicle speed design of roundabouts. Građevinar 2014, 66, 407–416. [Google Scholar] [CrossRef] [Green Version]
- García Cuenca, L.; Guindel, C.; Aliane, N.; Armingol, J.M.; Fernández Andrés, J. Dataset Construction from Naturalistic Driving in Roundabouts. Sensors 2020, 20, 7151. [Google Scholar] [CrossRef]
- El Fatimi, A.; Addaim, A.; Guennoun, Z. A low-cost IMU/GPS position accuracy experimental study using extended kalman filter data fusion in real environments. E3S Web Conf. 2021, 297, 01040. [Google Scholar] [CrossRef]
- Quddus, M.A.; Noland, R.B.; Ochieng, W.Y. A High Accuracy Fuzzy Logic Based Map Matching Algorithm for Road Transport. J. Intell. Transp. Syst. 2006, 10, 103–115. [Google Scholar] [CrossRef] [Green Version]
- Małecki, K.; Wątróbski, J. Cellular Automaton to Study the Impact of Changes in Traffic Rules in a Roundabout: A Preliminary Approach. Appl. Sci. 2017, 7, 742. [Google Scholar] [CrossRef] [Green Version]
- Kalašová, A.; Skřivánek Kubíková, S.; Čulík, K.; Palúch, J. Comparison of traffic flow characteristics of signal controlled intersection and turbo roundabout. Arch. Automot. Eng. Arch. Motoryz. 2020, 88, 19–36. [Google Scholar]
- Bassani, M.; Mussone, L. Experimental analysis of operational data for roundabouts through advanced image processing. J. Traffic Transp. Eng. 2020, 7, 482–497. [Google Scholar] [CrossRef]
- Vlkovský, M.; Neubauer, J.; Malíšek, J.; Michálek, J. Improvement of Road Safety through Appropriate Cargo Securing Using Outliers. Sustainability 2021, 13, 2688. [Google Scholar] [CrossRef]
- Deveaux, D.; Higuchi, T.; Uçar, S.; Wang, C.-H.; Härri, J.; Altintas, O. Extraction of Risk Knowledge from Time To Collision Variation in Roundabouts. In Proceedings of the 2021 IEEE International Intelligent Transportation Systems Conference (ITSC), Indianapolis, IN, USA, 19–22 September 2021; pp. 3665–3672. [Google Scholar] [CrossRef]
- García Cuenca, L.; Sanchez-Soriano, J.; Puertas, E.; Fernandez Andrés, J.; Aliane, N. Machine Learning Techniques for Undertaking Roundabouts in Autonomous Driving. Sensors 2019, 19, 2386. [Google Scholar] [CrossRef] [Green Version]
- Capasso, A.; Bacchiani, G.; Molinari, D. Intelligent Roundabout Insertion using Deep Reinforcement Learning. In Proceedings of the 12th International Conference on Agents and Artificial Intelligence ICAART, Valletta, Malta, 22–24 February 2020; Volume 2, pp. 378–385. [Google Scholar] [CrossRef]
- Wang, W.; Jiang, L.; Lin, S.l.; Fang, H.; Meng, Q. Imitation learning based decision-making for autonomous vehicle control at traffic roundabouts. Multimed. Tools. Appl. 2022, 1–17. [Google Scholar] [CrossRef]
- Ali, M.A.H.; Mailah, M.; Jabbar, W.A.; Moiduddin, K.; Ameen, W.; Alkhalefah, H. Autonomous Road Roundabout Detection and Navigation System for Smart Vehicles and Cities Using Laser Simulator–Fuzzy Logic Algorithms and Sensor Fusion. Sensors 2020, 20, 3694. [Google Scholar] [CrossRef]
- Deluka Tibljaš, A.; Giuffrè, T.; Surdonja, S.; Trubia, S. Introduction of Autonomous Vehicles: Roundabouts Design and Safety Performance Evaluation. Sustainability 2018, 10, 1060. [Google Scholar] [CrossRef] [Green Version]
- Muhammad, N.; Åstrand, B. Intention Estimation Using Set of Reference Trajectories as Behaviour Model. Sensors 2018, 18, 4423. [Google Scholar] [CrossRef] [Green Version]
- Meng, X.; Wang, H.; Liu, B. A Robust Vehicle Localization Approach Based on GNSS/IMU/DMI/LiDAR Sensor Fusion for Autonomous Vehicles. Sensors 2017, 17, 2140. [Google Scholar] [CrossRef]
- Pauca, O.; Maxim, A.; Caruntu, C.-F. Multivariable Optimisation for Waiting-Time Minimisation at Roundabout Intersections in a Cyber-Physical Framework. Sensors 2021, 21, 3968. [Google Scholar] [CrossRef] [PubMed]
- Mischinger, M.; Rudigier, M.; Wimmer, P.; Kerschbaumer, A. Towards comfort-optimal trajectory planning and control. Veh. Syst. Dyn. 2018, 57, 1108–1125. [Google Scholar] [CrossRef]
- Pratelli, A.; Lupi, M.; Pratelli, C.; Farina, A. Mini-roundabouts for Improving Urban Accessibility. In Modelling of the Interaction of the Different Vehicles and Various Transport Modes; Sładkowski, A., Ed.; Lecture Notes in Intelligent Transportation and Infrastructure; Springer: Cham, Switzerland, 2020; pp. 333–382. [Google Scholar] [CrossRef]
- EN 12195-1:2010 Load Restraining on Road Vehicles. Safety. Part 1: Calculation of Securing Forces. Available online: https://standards.iteh.ai/catalog/standards/cen/72067d57-b90c-4ca5-8bd0-f876e25e6a6e/en-12195-1-2010 (accessed on 7 February 2022).
- IMO/ILO/UNECE Code of Practice for Packing of Cargo Transport Units (CTU Code). 2014. Available online: https://unece.org/fileadmin/DAM/trans/doc/2014/wp24/CTU_Code_January_2014.pdf (accessed on 7 February 2022).
- VDI 2700 Blatt 16 Ladungssicherung auf Straßenfahrzeugen—Ladungssicherung bei Transportern bis 7.5 t zGM. Available online: https://www.vdi.de/richtlinien/details/vdi-2700-blatt-16-ladungssicherung-auf-strassenfahrzeugen-ladungssicherung-bei-transportern-bis-75-t-zgm (accessed on 7 February 2022).
- Regulation (EU) 2018/858 of the European parliament and of the council of 30 May 2018 on the Approval and Market Sur-veillance of Motor Vehicles and Their Trailers, and of Systems, Components and Separate Technical Units Intended for Such Vehicles, Amending Regulations (EC) No 715/2007 and (EC) No 595/2009 and Repealing Directive 2007/46/EC. Available online: https://eur-lex.europa.eu/legal-content/EN/TXT/?uri=CELEX:02018R0858-20210926 (accessed on 8 February 2022).
- EN 12642:2016 Securing of Road on Road Vehicles—Body Structure of Commercial Vehicles—Minimum Requirements. Available online: https://standards.iteh.ai/catalog/standards/cen/cfb5d8a8-67c0-46fc-8b51-be9163596d6c/en-12642-2016 (accessed on 7 February 2022).
- EN 17321:2020 Intermodal Loading Units and Commercial Vehicles—Transport Stability of Packages—Minimum Require-ments and Tests. Available online: https://standards.iteh.ai/catalog/standards/sist/545c1b9f-c7d0-4196-aec8-eb1cbe8f0f81/ksist-fpren-17321-2020 (accessed on 7 February 2022).
- Balkwill, J. Performance Vehicle Dynamics; Butterworth-Heinemann: Oxford, UK, 2018; ISBN 978-0-12-812693-6. [Google Scholar]
- Friedman, M. The Use of Ranks to Avoid the Assumption of Normality Implicit in the Analysis of Variance. J. Am. Stat. Assoc. 1937, 32, 675–701. [Google Scholar] [CrossRef]
- Sammut, C.; Webb, G.I. (Eds.) Mean Squared Error. In Encyclopedia of Machine Learning; Springer: Boston, MA, USA, 2011. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
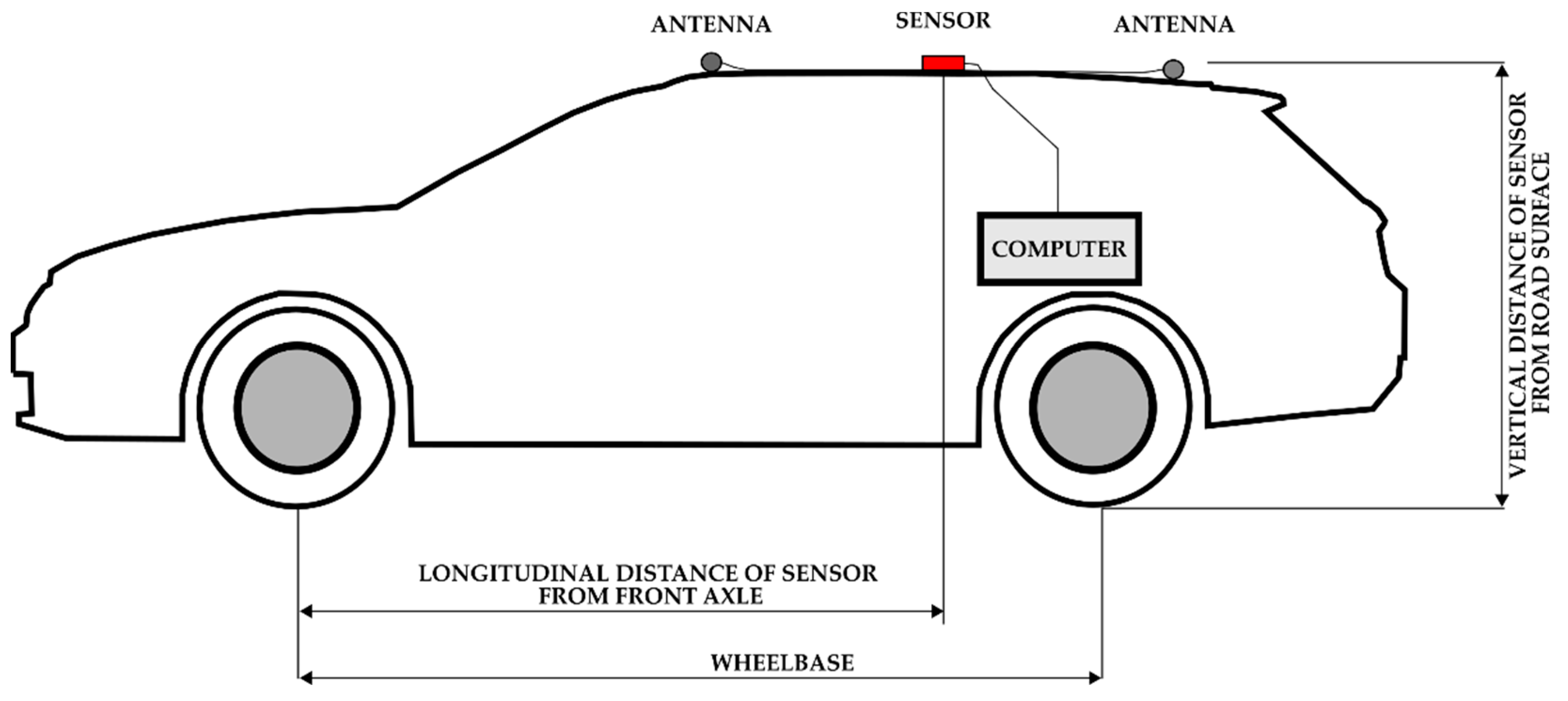
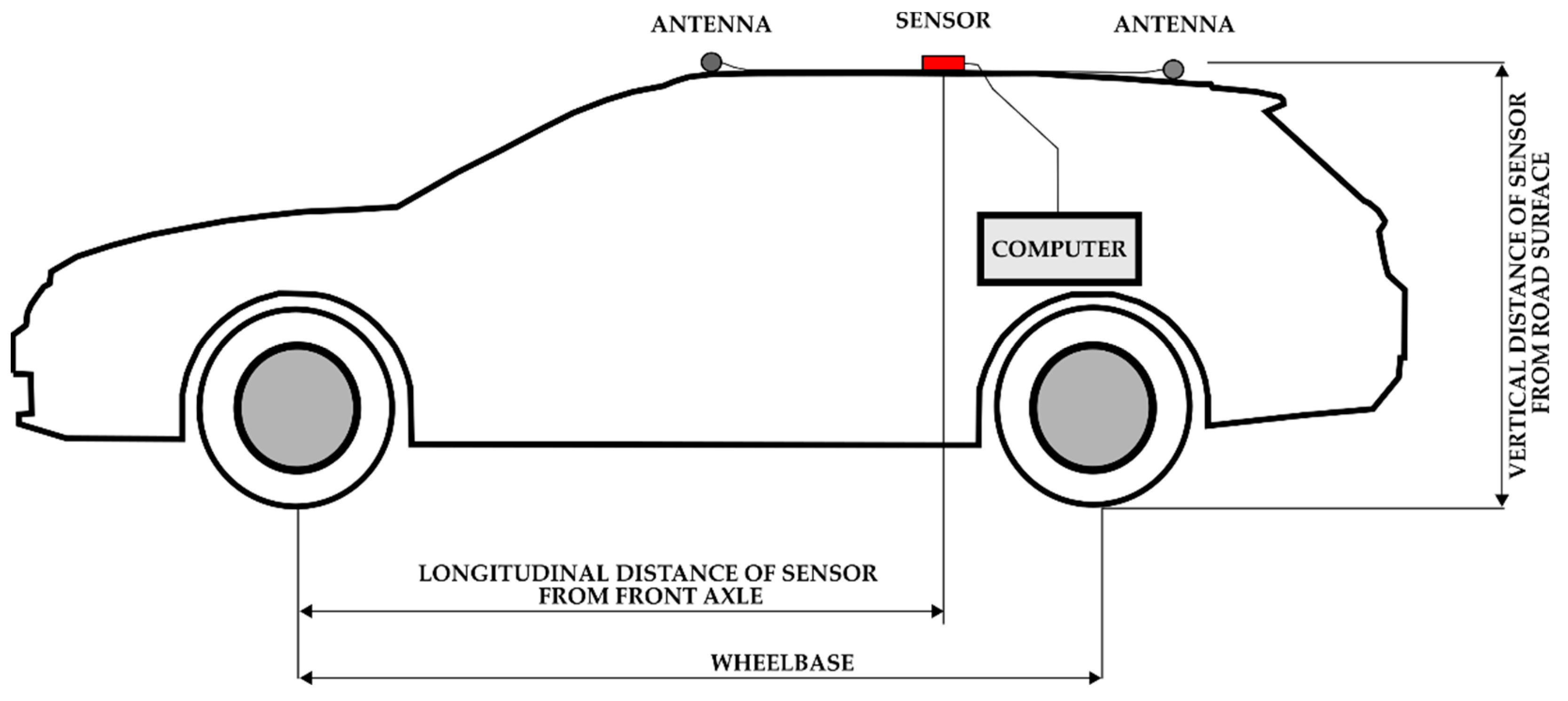
| ID | Vehicle Name | Manufacturing Year | Vehicle Category according to [30] | Vehicle Mass [kg] | Wheelbase [mm] | Longitudinal Distance of Sensor from Front Axle [mm] | Ratio of Position of the Sensor and Wheelbase [mm] | Vertical Distance of Sensor from Road Surface [mm] |
|---|---|---|---|---|---|---|---|---|
| V1 | VW Golf | 2001 | M1 | 1265 | 2504 | 1805 | 0.72 | 1480 |
| V2 | VW Polo | 2006 | M1 | 1138 | 2441 | 1692 | 0.69 | 1480 |
| V3 | VW Polo | 2004 | M1 | 1033 | 2465 | 1721 | 0.7 | 1500 |
| V4 | VW Touareg | 2003 | M1G | 2420 | 2865 | 1870 | 0.65 | 1713 |
| V5 | Opel Antara | 2014 | M1 | 1941 | 2710 | 1815 | 0.67 | 1705 |
| V6 | Škoda Fabia | 2014 | M1 | 1116 | 2460 | 1780 | 0.72 | 1550 |
| V7 | Honda Accord Combi | 2008 | M1 | 1766 | 2690 | 1850 | 0.69 | 1445 |
| V8 | VW Touareg; trailer | 2003; 2005 | M1G; O1 | 2850 | 2865; 2818 | 1870 | 0.65 | 1713 |
| V9 | Mitsubishi Pajero; trailer | 1986; 1989 | M1G; O1 | 2480 | 2690; 3350 | 1901 | 0.71 | 1890 |
| V10 | Renault Master | 2019 | N1 | 3350 | 4325 | 3020 | 0.7 | 2320 |
| V11 | Renault Master | 2019 | N1 | 2350 | 4325 | 3020 | 0.7 | 2320 |
| V12 | Renault Master | 2014 | N1 | 3330 | 4360 | 2920 | 0.67 | 2355 |
| V13 | Renault Master | 2014 | N1 | 2330 | 4360 | 2920 | 0.67 | 2355 |
| TSC | Minimum Radius of Roundabout [m] | Maximum Radius of Roundabout [m] | Minimum Radius R2 of Quadrant of SEL3 [m] | Maximum Radius R2 of Quadrant of SEL3 [m] | Number of Exits | Average Number of Turns from SEL3 | Number of Quadrants |
|---|---|---|---|---|---|---|---|
| 1 | 10.22 | 17.85 | 12.66 | 14.80 | 4 | 1.78 | 6 |
| 2 | 10.22 | 17.85 | 12.96 | 14.82 | 4 | 1.94 | 7 |
| 3 | 9.11 | 17.71 | 11.87 | 14.79 | 4 | 2.01 | 8 |
| 4 | 7.37 | 14.91 | 9.98 | 12.09 | 4 | 1.66 | 6 |
| 5 | 7.21 | 14.98 | 10.11 | 12.25 | 3 | 1.90 | 7 |
| TSC1 | TSC2 | TSC3 | TSC4 | TSC5 | Total Average | Rank | ||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| v | ay1000 | v | ay1000 | v | ay1000 | v | ay1000 | v | ay1000 | v | ay1000 | v | ay1000 | |
| V1 | 26.50 | −0.485 | 27.43 | −0.510 | 26.28 | −0.478 | 23.75 | −0.485 | 25.73 | −0.558 | 25.93 | −0.503 | 3 | 3 |
| V2 | 24.40 | −0.382 | 25.67 | −0.422 | 26.76 | −0.461 | 24.53 | −0.488 | 24.52 | −0.475 | 25.16 | −0.446 | 5 | 7 |
| V3 | 23.96 | −0.403 | 23.51 | −0.389 | 23.86 | −0.393 | 22.74 | −0.461 | 20.73 | −0.377 | 22.96 | −0.403 | 11 | 11 |
| V4 | 23.42 | −0.391 | 24.33 | −0.409 | 26.23 | −0.480 | 23.13 | −0.469 | 24.74 | −0.538 | 24.43 | −0.459 | 6 | 5 |
| V5 | 24.44 | −0.413 | 24.70 | −0.413 | 24.83 | −0.425 | 23.78 | −0.477 | 22.38 | −0.419 | 24.09 | −0.429 | 8 | 9 |
| V6 | 27.33 | −0.504 | 28.83 | −0.554 | 28.45 | −0.545 | 25.78 | −0.564 | 26.81 | −0.606 | 27.52 | −0.555 | 1 | 1 |
| V7 | 21.04 | −0.312 | 21.66 | −0.336 | 22.68 | −0.354 | 21.39 | −0.392 | 20.92 | −0.359 | 21.59 | −0.350 | 13 | 13 |
| V8 | 22.84 | −0.369 | 23.75 | −0.390 | 23.57 | −0.397 | 21.76 | −0.417 | 21.99 | −0.417 | 22.83 | −0.398 | 12 | 12 |
| V9 | 24.80 | −0.445 | 24.68 | −0.448 | 24.99 | −0.457 | 22.54 | −0.467 | 22.85 | −0.468 | 24.01 | −0.457 | 9 | 6 |
| V10 | 24.36 | −0.419 | 25.60 | −0.451 | 25.66 | −0.449 | 22.10 | −0.439 | 22.46 | −0.435 | 24.12 | −0.439 | 7 | 8 |
| V11 | 26.02 | −0.468 | 27.19 | −0.497 | 27.41 | −0.500 | 24.58 | −0.522 | 24.98 | −0.522 | 26.09 | −0.503 | 2 | 2 |
| V12 | 23.14 | −0.374 | 24.04 | −0.400 | 25.29 | −0.437 | 22.23 | −0.421 | 22.20 | −0.420 | 23.45 | −0.411 | 10 | 10 |
| V13 | 24.73 | −0.418 | 27.33 | −0.499 | 28.41 | −0.534 | 22.45 | −0.435 | 24.41 | −0.486 | 25.64 | −0.479 | 4 | 4 |
| Total average | 24.37 | −0.414 | 25.25 | −0.438 | 25.67 | −0.453 | 23.19 | −0.466 | 23.41 | −0.466 | 24.44 | −0.448 | ||
| Rank | 3 | 5 | 2 | 4 | 1 | 3 | 5 | 2 | 4 | 1 | ||||
| V1 | V2 | V3 | V4 | V5 | V6 | V7 | V8 | V9 | V10 | V11 | V12 | V13 | Total Average | Rank | |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| TSC1 | −0.485 | −0.382 | −0.403 | −0.391 | −0.413 | −0.504 | −0.312 | −0.369 | −0.445 | −0.419 | −0.468 | −0.374 | −0.418 | −0.414 | |
| Q-1 | −0.465 | −0.364 | −0.388 | −0.392 | −0.398 | −0.494 | −0.304 | −0.374 | −0.441 | −0.412 | −0.459 | −0.382 | −0.422 | −0.407 | 4 |
| Q-2 | −0.474 | −0.380 | −0.389 | −0.392 | −0.409 | −0.511 | −0.313 | −0.355 | −0.444 | −0.413 | −0.456 | −0.364 | −0.401 | −0.408 | 3 |
| Q-3 | −0.518 | −0.427 | −0.437 | −0.412 | −0.447 | −0.554 | −0.324 | −0.384 | −0.452 | −0.447 | −0.507 | −0.378 | −0.419 | −0.439 | 1 |
| Q-4 | −0.513 | −0.376 | −0.430 | −0.374 | −0.416 | −0.458 | −0.312 | −0.371 | −0.452 | −0.416 | −0.470 | −0.375 | −0.444 | −0.413 | 2 |
| TSC2 | −0.510 | −0.422 | −0.389 | −0.409 | −0.413 | −0.554 | −0.336 | −0.390 | −0.448 | −0.451 | −0.497 | −0.400 | −0.499 | −0.438 | |
| Q-1 | −0.510 | −0.478 | −0.385 | −0.425 | −0.438 | −0.595 | −0.318 | −0.400 | −0.447 | −0.465 | −0.518 | −0.413 | −0.534 | −0.455 | 1 |
| Q-2 | −0.519 | −0.442 | −0.399 | −0.422 | −0.419 | −0.577 | −0.349 | −0.404 | −0.460 | −0.472 | −0.517 | −0.394 | −0.485 | −0.449 | 2 |
| Q-3 | −0.510 | −0.405 | −0.386 | −0.409 | −0.407 | −0.529 | −0.338 | −0.391 | −0.455 | −0.445 | −0.495 | −0.404 | −0.493 | −0.434 | 3 |
| Q-4 | −0.500 | −0.392 | −0.383 | −0.388 | −0.400 | −0.536 | −0.330 | −0.370 | −0.430 | −0.430 | −0.468 | −0.397 | −0.500 | −0.424 | 4 |
| TSC3 | −0.478 | −0.461 | −0.393 | −0.480 | −0.425 | −0.545 | −0.354 | −0.397 | −0.457 | −0.449 | −0.500 | −0.437 | −0.534 | −0.453 | |
| Q-1 | −0.459 | −0.421 | −0.385 | −0.471 | −0.405 | −0.534 | −0.360 | −0.386 | −0.448 | −0.432 | −0.483 | −0.432 | −0.518 | −0.440 | 3 |
| Q-2 | −0.465 | −0.427 | −0.366 | −0.435 | −0.410 | −0.510 | −0.353 | −0.366 | −0.435 | −0.431 | −0.467 | −0.424 | −0.508 | −0.429 | 4 |
| Q-3 | −0.492 | −0.496 | −0.395 | −0.494 | −0.443 | −0.575 | −0.340 | −0.412 | −0.450 | −0.444 | −0.509 | −0.432 | −0.535 | −0.462 | 2 |
| Q-4 | −0.496 | −0.494 | −0.426 | −0.514 | −0.444 | −0.560 | −0.363 | −0.421 | −0.491 | −0.485 | −0.539 | −0.456 | −0.573 | −0.480 | 1 |
| TSC4 | −0.485 | −0.488 | −0.461 | −0.469 | −0.477 | −0.564 | −0.392 | −0.417 | −0.467 | −0.439 | −0.522 | −0.421 | −0.435 | −0.466 | |
| Q-1 | −0.480 | −0.481 | −0.457 | −0.481 | −0.477 | −0.530 | −0.388 | −0.418 | −0.468 | −0.418 | −0.510 | −0.426 | −0.438 | −0.462 | 3 |
| Q-22 | −0.512 | −0.494 | −0.474 | −0.489 | −0.481 | −0.563 | −0.398 | −0.430 | −0.488 | −0.456 | −0.550 | −0.426 | −0.440 | −0.478 | 2 |
| Q-3 | −0.462 | −0.458 | −0.435 | −0.444 | −0.461 | −0.571 | −0.378 | −0.400 | −0.450 | −0.434 | −0.501 | −0.405 | −0.420 | −0.449 | 4 |
| Q-4 | −0.482 | −0.542 | −0.490 | −0.465 | −0.503 | −0.585 | −0.412 | −0.426 | −0.462 | −0.433 | −0.523 | −0.436 | −0.453 | −0.480 | 1 |
| TSC5 | −0.558 | −0.475 | −0.377 | −0.538 | −0.419 | −0.606 | −0.359 | −0.417 | −0.468 | −0.435 | −0.522 | −0.420 | −0.486 | −0.466 | |
| Q-1 | −0.551 | −0.467 | −0.352 | −0.528 | −0.399 | −0.596 | −0.326 | −0.397 | −0.452 | −0.412 | −0.509 | −0.394 | −0.461 | −0.448 | 4 |
| Q-2 | −0.573 | −0.476 | −0.361 | −0.538 | −0.415 | −0.583 | −0.376 | −0.429 | −0.470 | −0.445 | −0.529 | −0.440 | −0.502 | −0.471 | 2 |
| Q-3 | −0.543 | −0.465 | −0.403 | −0.525 | −0.420 | −0.623 | −0.380 | −0.417 | −0.478 | −0.441 | −0.510 | −0.413 | −0.477 | −0.467 | 3 |
| Q-4 | −0.573 | −0.512 | −0.406 | −0.585 | −0.465 | −0.638 | −0.351 | −0.435 | −0.478 | −0.446 | −0.549 | −0.443 | −0.526 | −0.493 | 1 |
| Total average | −0.503 | −0.446 | −0.403 | −0.459 | −0.429 | −0.555 | −0.350 | −0.398 | −0.457 | −0.439 | −0.503 | −0.411 | −0.479 | −0.448 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Jagelčák, J.; Gnap, J.; Kostrzewski, M.; Kuba, O.; Frnda, J. Calculation of an Average Vehicle’s Sideways Acceleration on Small Roundabouts. Sensors 2022, 22, 4978. https://doi.org/10.3390/s22134978
Jagelčák J, Gnap J, Kostrzewski M, Kuba O, Frnda J. Calculation of an Average Vehicle’s Sideways Acceleration on Small Roundabouts. Sensors. 2022; 22(13):4978. https://doi.org/10.3390/s22134978
Chicago/Turabian StyleJagelčák, Juraj, Jozef Gnap, Mariusz Kostrzewski, Ondrej Kuba, and Jaroslav Frnda. 2022. "Calculation of an Average Vehicle’s Sideways Acceleration on Small Roundabouts" Sensors 22, no. 13: 4978. https://doi.org/10.3390/s22134978
APA StyleJagelčák, J., Gnap, J., Kostrzewski, M., Kuba, O., & Frnda, J. (2022). Calculation of an Average Vehicle’s Sideways Acceleration on Small Roundabouts. Sensors, 22(13), 4978. https://doi.org/10.3390/s22134978