
A Bearing Fault Classification Framework Based on Image Encoding Techniques and a Convolutional Neural Network under Different Operating Conditions


 ,
, 

Abstract
:1. Introduction
2. Theoretical Background
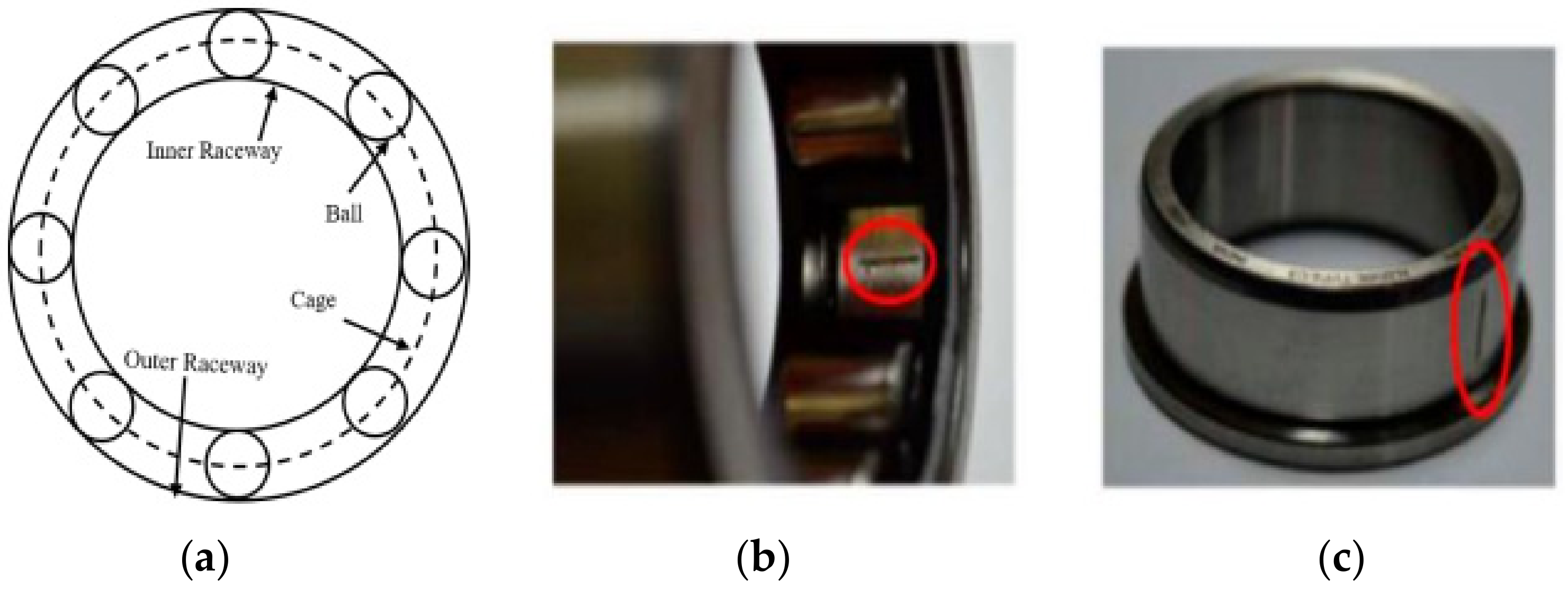
2.1. Bearing Fault Frequencies
2.2. Transformation of Time-Series Data into Images
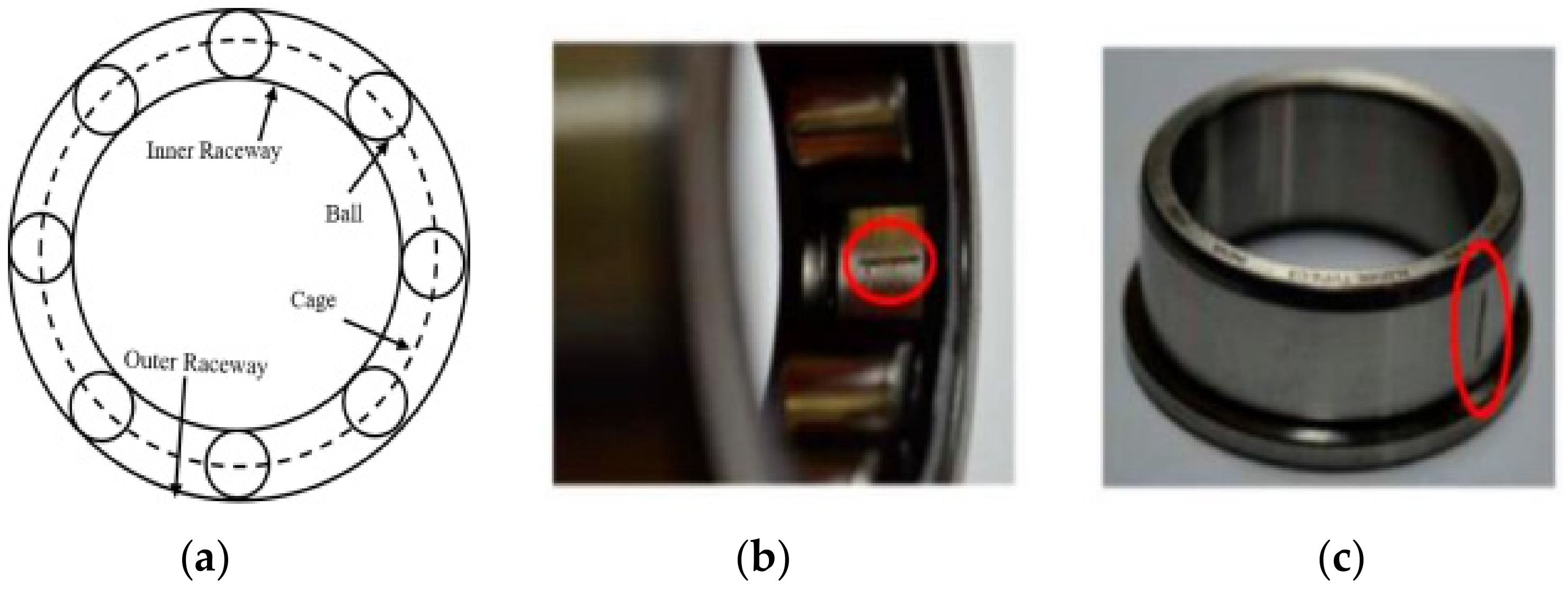
2.2.1. Data Segmentation
2.2.2. Gramian Angular Field (GAF)
- (i)
- Normalization of the time-series data
- (ii)
- Transforming normalized data to polar coordinates
- (iii)
- Calculating GASF and GADF
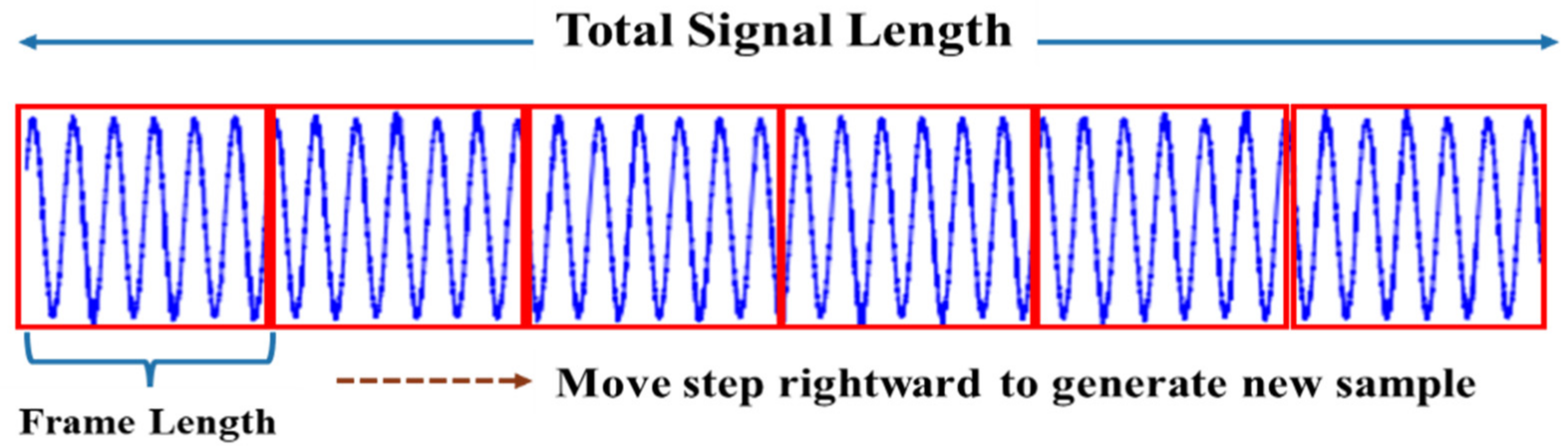
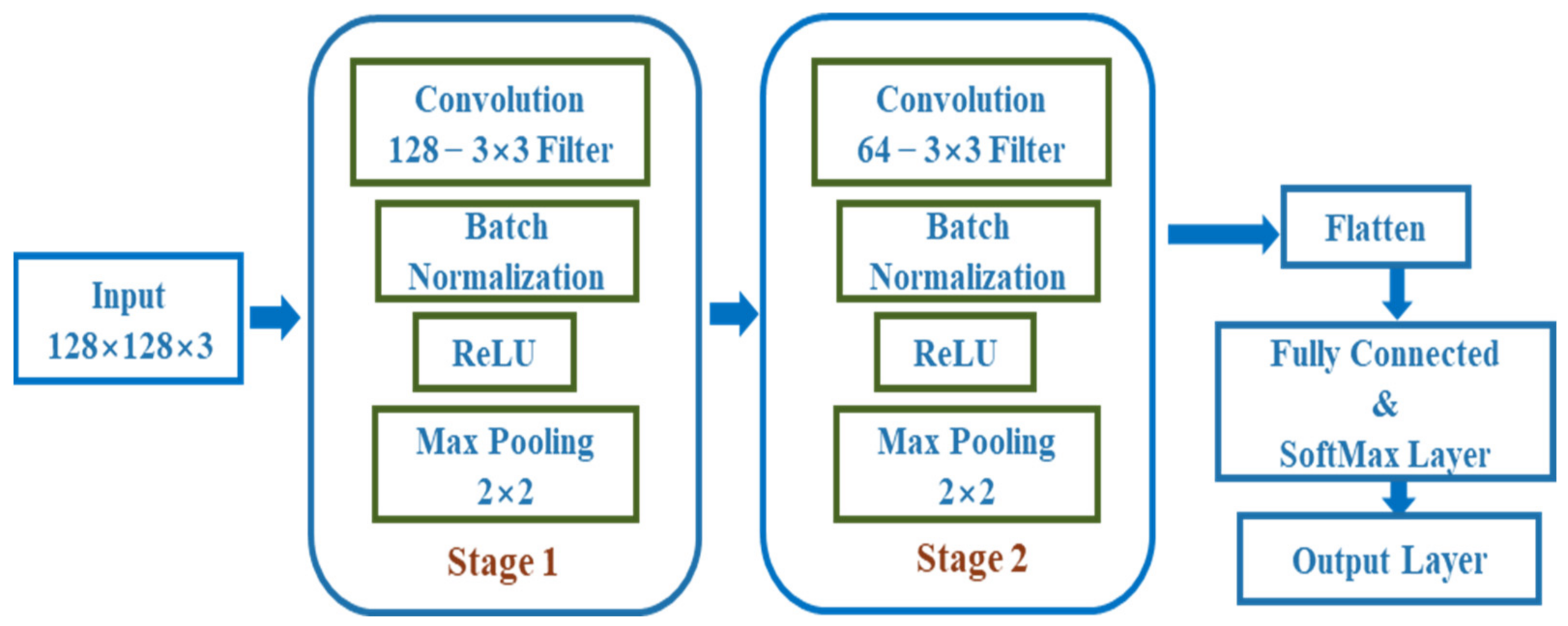
2.3. CNN Model
2.3.1. Convolution Layer
2.3.2. Pooling Layer
2.3.3. Fully Connected Layer
3. Methodology
3.1. Experimental Testbed
3.2. Proposed Method
- (i)
- Split data based on operating conditions
- (ii)
- Data segmentation
- (iii)
- Transforming to 2-D images
- (iv)
- Classification using a CNN
3.3. Performance Evaluation Parameters
4. Experimental Results
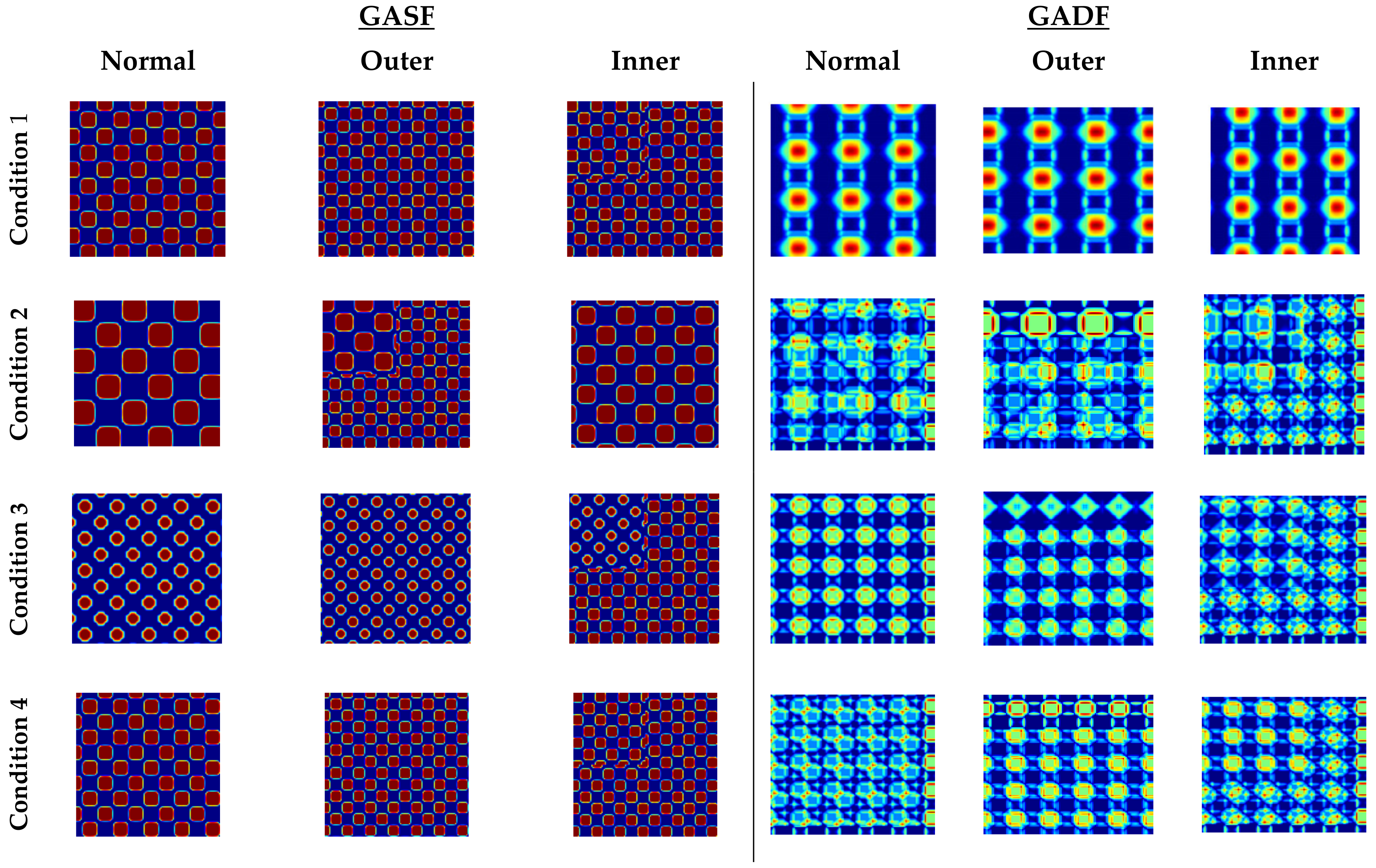
4.1. Analysis of Current Signal Imaging with GASF and GADF
4.2. Diagnosis Performance of the Proposed Method
4.3. Comparison with Some State-of-the-Art Methods
4.4. Comparison with Existing Works
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Waide, P.; Brunner, C.U. Energy-Efficiency Policy Opportunities for Electric Motor-Driven Systems. Int. Energy Agency 2011, 7, 1–132. [Google Scholar] [CrossRef]
- Ayhan, B.; Chow, M.Y.; Song, M.H. Multiple signature processing-based fault detection schemes for broken rotor bar in induction motors. IEEE Trans. Energy Convers. 2005, 20, 336–343. [Google Scholar] [CrossRef] [Green Version]
- Hasan, M.J.; Sohaib, M.; Kim, J.M. A multitask-aided transfer learning-based diagnostic framework for bearings under inconsistent working conditions. Sensors 2020, 20, 7205. [Google Scholar] [CrossRef] [PubMed]
- Singh, G.; Naikan, V.N.A. Detection of half broken rotor bar fault in VFD driven induction motor drive using motor square current MUSIC analysis. Mech. Syst. Signal Process. 2018, 110, 333–348. [Google Scholar] [CrossRef]
- Thomson, W.T.; Fenger, M. Current signature analysis to detect induction motor faults. IEEE Ind. Appl. Mag. 2001, 7, 26–34. [Google Scholar] [CrossRef]
- Mboo, C.P.; Hameyer, K. Fault diagnosis of bearing damage by means of the linear discriminant analysis of stator current features from the frequency selection. IEEE Trans. Ind. Appl. 2016, 52, 3861–3868. [Google Scholar] [CrossRef]
- Wang, J.; Wang, D.; Wang, S.; Li, W.; Song, K. Fault Diagnosis of Bearings Based on Multi-Sensor Information Fusion and 2D Convolutional Neural Network. IEEE Access 2021, 9, 23717–23725. [Google Scholar] [CrossRef]
- Kumar, A.; Vashishtha, G.; Gandhi, C.P.; Zhou, Y.; Glowacz, A.; Xiang, J. Novel convolutional neural network (NCNN) for the diagnosis of bearing defects in rotary machinery. IEEE Trans. Instrum. Meas. 2021, 70, 1–10. [Google Scholar] [CrossRef]
- Benbouzid, M.E.H.; Vieira, M.; Theys, C. Induction motors’ faults detection and localization using stator current advanced signal processing techniques. IEEE Trans. Power Electron. 1999, 14, 14–22. [Google Scholar] [CrossRef]
- Toma, R.N.; Kim, J.M. Article bearing fault classification of induction motors using discrete wavelet transform and ensemble machine learning algorithms. Appl. Sci. 2020, 10, 5251. [Google Scholar] [CrossRef]
- Corley, B.; Koukoura, S.; Carroll, J.; McDonald, A. Combination of Thermal Modelling and Machine Learning Approaches for Fault Detection in Wind Turbine Gearboxes. Energies 2021, 14, 1375. [Google Scholar] [CrossRef]
- Pham, M.T.; Kim, J.M.; Kim, C.H. Intelligent fault diagnosis method using acoustic emission signals for bearings under complex working conditions. Appl. Sci. 2020, 10, 7068. [Google Scholar] [CrossRef]
- Skowron, M.; Wolkiewicz, M.; Orlowska-Kowalska, T.; Kowalski, C.T. Effectiveness of selected neural network structures based on axial flux analysis in stator and rotor winding incipient fault detection of inverter-fed induction motors. Energies 2019, 12, 2392. [Google Scholar] [CrossRef] [Green Version]
- Sohaib, M.; Kim, C.H.; Kim, J.M. A hybrid feature model and deep-learning-based bearing fault diagnosis. Sensors 2017, 17, 2876. [Google Scholar] [CrossRef] [Green Version]
- Elbouchikhi, E.; Choqueuse, V.; Auger, F.; Benbouzid, M.E.H. Motor Current Signal Analysis based on a Matched Subspace Detector. IEEE Trans. Instrum. Meas. 2017, 66, 3260–3270. [Google Scholar] [CrossRef] [Green Version]
- Liu, M.K.; Tran, M.Q.; Weng, P.Y. Fusion of vibration and current signatures for the fault diagnosis of induction machines. Shock Vib. 2019, 2019, 7176482. [Google Scholar] [CrossRef]
- Tian, J.; Morillo, C.; Azarian, M.H.; Pecht, M. Motor Bearing Fault Detection Using Spectral Kurtosis-Based Feature Extraction Coupled with K-Nearest Neighbor Distance Analysis. IEEE Trans. Ind. Electron. 2016, 63, 1793–1803. [Google Scholar] [CrossRef]
- Prieto, M.D.; Cirrincione, G.; Espinosa, A.G.; Ortega, J.A.; Henao, H. Bearing fault detection by a novel condition-monitoring scheme based on statistical-time features and neural networks. IEEE Trans. Ind. Electron. 2013, 60, 3398–3407. [Google Scholar] [CrossRef]
- Soualhi, A.; Medjaher, K.; Zerhouni, N. Bearing health monitoring based on hilbert-huang transform, support vector machine, and regression. IEEE Trans. Instrum. Meas. 2015, 64, 52–62. [Google Scholar] [CrossRef] [Green Version]
- Toma, R.N.; Prosvirin, A.E.; Kim, J.M. Bearing fault diagnosis of induction motors using a genetic algorithm and machine learning classifiers. Sensors 2020, 20, 1884. [Google Scholar] [CrossRef] [Green Version]
- Toma, R.N.; Kim, C.H.; Kim, J.M. Bearing fault classification using ensemble empirical mode decomposition and convolutional neural network. Electronics 2021, 10, 1248. [Google Scholar] [CrossRef]
- Liu, R.; Yang, B.; Zhang, X.; Wang, S.; Chen, X. Time-frequency atoms-driven support vector machine method for bearings incipient fault diagnosis. Mech. Syst. Signal Process. 2016, 75, 345–370. [Google Scholar] [CrossRef]
- Yan, X.; Jia, M. A novel optimized SVM classification algorithm with multi-domain feature and its application to fault diagnosis of rolling bearing. Neurocomputing 2018, 313, 47–64. [Google Scholar] [CrossRef]
- Toma, R.N.; Hasan, M.N.; Nahid, A.A.; Li, B. Electricity Theft Detection to Reduce Non-Technical Loss using Support Vector Machine in Smart Grid. In Proceedings of the 1st International Conference on Advances in Science, Engineering and Robotics Technology 2019, ICASERT 2019, Dhaka, Bangladesh, 3–5 May 2019; Volume 2019. [Google Scholar]
- Pandhare, V.; Singh, J.; Lee, J. Convolutional Neural Network Based Rolling-Element Bearing Fault Diagnosis for Naturally Occurring and Progressing Defects Using Time-Frequency Domain Features. In Proceedings of the 2019 Prognostics and System Health Management Conference, PHM-Paris 2019, Paris, France, 2–5 May 2019; pp. 320–326. [Google Scholar]
- Moosavian, A.; Jafari, S.M.; Khazaee, M.; Ahmadi, H. A comparison between ANN, SVM and least squares SVM: Application in multi-fault diagnosis of rolling element bearing. Int. J. Acoust. Vib. 2018, 23, 432–440. [Google Scholar] [CrossRef]
- Hsueh, Y.M.; Ittangihal, V.R.; Wu, W.B.; Chang, H.C.; Kuo, C.C. Fault diagnosis system for induction motors by CNN using empirical wavelet transform. Symmetry 2019, 11, 1212. [Google Scholar] [CrossRef] [Green Version]
- Xia, M.; Li, T.; Xu, L.; Liu, L.; De Silva, C.W. Fault Diagnosis for Rotating Machinery Using Multiple Sensors and Convolutional Neural Networks. IEEE/ASME Trans. Mechatron. 2018, 23, 101–110. [Google Scholar] [CrossRef]
- Tran, M.Q.; Elsisi, M.; Mahmoud, K.; Liu, M.K.; Lehtonen, M.; Darwish, M.M.F. Experimental Setup for Online Fault Diagnosis of Induction Machines via Promising IoT and Machine Learning: Towards Industry 4.0 Empowerment. IEEE Access 2021, 9, 115429–115441. [Google Scholar] [CrossRef]
- Chen, Z.; Gao, R.X.; Mao, K.; Wang, P.; Yan, R.; Zhao, R. Deep learning and its applications to machine health monitoring. Mech. Syst. Signal Process. 2019, 115, 213–237. [Google Scholar]
- Hoang, D.T.; Kang, H.J. A survey on Deep Learning based bearing fault diagnosis. Neurocomputing 2019, 335, 327–335. [Google Scholar] [CrossRef]
- Qi, Y.; Shen, C.; Wang, D.; Shi, J.; Jiang, X.; Zhu, Z. Stacked Sparse Autoencoder-Based Deep Network for Fault Diagnosis of Rotating Machinery. IEEE Access 2017, 5, 15066–15079. [Google Scholar] [CrossRef]
- Toma, R.N.; Piltan, F.; Kim, J.M. A deep autoencoder-based convolution neural network framework for bearing fault classification in induction motors. Sensors 2021, 21, 8453. [Google Scholar] [CrossRef] [PubMed]
- Shao, H.; Jiang, H.; Zhang, X.; Niu, M. Rolling bearing fault diagnosis using an optimization deep belief network. Meas. Sci. Technol. 2015, 26, 115002. [Google Scholar] [CrossRef]
- Deng, S.; Cheng, Z.; Li, C.; Yao, X.; Chen, Z.; Sanchez, R.V. Rolling bearing fault diagnosis based on deep boltzmann machines. In Proceedings of the 2016 Prognostics and System Health Management Conference, Chengdu, China, 19–21 October 2016. [Google Scholar] [CrossRef]
- Chen, Z.; Li, W. Multisensor feature fusion for bearing fault diagnosis using sparse autoencoder and deep belief network. IEEE Trans. Instrum. Meas. 2017, 66, 1693–1702. [Google Scholar] [CrossRef]
- Yu, K.; Lin, T.R.; Tan, J. A bearing fault and severity diagnostic technique using adaptive deep belief networks and Dempster–Shafer theory. Struct. Health Monit. 2020, 19, 240–261. [Google Scholar] [CrossRef]
- Xiong, S.; Zhou, H.; He, S.; Zhang, L.; Xia, Q.; Xuan, J.; Shi, T. A novel end-to-end fault diagnosis approach for rolling bearings by integrating wavelet packet transform into convolutional neural network structures. Sensors 2020, 20, 4965. [Google Scholar] [CrossRef]
- Ince, T.; Kiranyaz, S.; Eren, L.; Askar, M.; Gabbouj, M. Real-Time Motor Fault Detection by 1-D Convolutional Neural Networks. IEEE Trans. Ind. Electron. 2016, 63, 7067–7075. [Google Scholar] [CrossRef]
- Janssens, O.; Slavkovikj, V.; Vervisch, B.; Stockman, K.; Loccufier, M.; Verstockt, S.; Van de Walle, R.; Van Hoecke, S. Convolutional Neural Network Based Fault Detection for Rotating Machinery. J. Sound Vib. 2016, 377, 331–345. [Google Scholar] [CrossRef]
- Guo, X.; Chen, L.; Shen, C. Hierarchical adaptive deep convolution neural network and its application to bearing fault diagnosis. Meas. J. Int. Meas. Confed. 2016, 93, 490–502. [Google Scholar] [CrossRef]
- Peng, D.; Liu, Z.; Wang, H.; Qin, Y.; Jia, L. A novel deeper one-dimensional CNN with residual learning for fault diagnosis of wheelset bearings in high-speed trains. IEEE Access 2019, 7, 10278–12093. [Google Scholar] [CrossRef]
- Li, G.; Deng, C.; Wu, J.; Chen, Z.; Xu, X. Rolling bearing fault diagnosis based on wavelet packet transform and convolutional neural network. Appl. Sci. 2020, 10, 770. [Google Scholar] [CrossRef] [Green Version]
- Pham, M.T.; Kim, J.M.; Kim, C.H. Accurate bearing fault diagnosis under variable shaft speed using convolutional neural networks and vibration spectrogram. Appl. Sci. 2020, 10, 6385. [Google Scholar] [CrossRef]
- He, K.; Zhang, X.; Ren, S.; Sun, J. Deep residual learning for image recognition. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Las Vegas, NV, USA, 30 June 2016; pp. 770–778. [Google Scholar]
- Simonyan, K.; Zisserman, A. Very deep convolutional networks for large-scale image recognition. In Proceedings of the 3rd International Conference on Learning Representations, ICLR 2015, San Diego, CA, USA, 7–9 May 2015. [Google Scholar]
- Wu, J. Sensor data-driven bearing fault diagnosis based on deep convolutional neural networks and s-transform. Sensors 2019, 19, 2750. [Google Scholar] [CrossRef] [Green Version]
- Duong, B.P.; Kim, J.Y.; Jeong, I.; Im, K.; Kim, C.H.; Kim, J.M. A Deep-Learning-Based Bearing Fault Diagnosis Using Defect Signature Wavelet Image Visualization. Appl. Sci. 2020, 10, 8800. [Google Scholar] [CrossRef]
- Wang, J.; Mo, Z.; Zhang, H.; Miao, Q. A deep learning method for bearing fault diagnosis based on time-frequency image. IEEE Access 2019, 7, 42373–42383. [Google Scholar] [CrossRef]
- Tran, M.Q.; Liu, M.K.; Tran, Q.V.; Nguyen, T.K. Effective Fault Diagnosis Based on Wavelet and Convolutional Attention Neural Network for Induction Motors. IEEE Trans. Instrum. Meas. 2022, 71, 3501613. [Google Scholar] [CrossRef]
- Tran, M.Q.; Liu, M.K.; Tran, Q.V. Milling chatter detection using scalogram and deep convolutional neural network. Int. J. Adv. Manuf. Technol. 2020, 107, 1505–1516. [Google Scholar] [CrossRef]
- Lu, C.; Wang, Y.; Ragulskis, M.; Cheng, Y. Fault diagnosis for rotating machinery: A method based on image processing. PLoS ONE 2016, 11, e0164111. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Wen, L.; Li, X.; Gao, L.; Zhang, Y. A New Convolutional Neural Network-Based Data-Driven Fault Diagnosis Method. IEEE Trans. Ind. Electron. 2018, 65, 5990–5998. [Google Scholar] [CrossRef]
- Zhang, D.; Zhou, T. Deep Convolutional Neural Network Using Transfer Learning for Fault Diagnosis. IEEE Access 2021, 9, 43889–43897. [Google Scholar] [CrossRef]
- Han, B.; Zhang, H.; Sun, M.; Wu, F. A new bearing fault diagnosis method based on capsule network and markov transition field/gramian angular field. Sensors 2021, 21, 7762. [Google Scholar] [CrossRef]
- Kiangala, K.S.; Wang, Z. An Effective Predictive Maintenance Framework for Conveyor Motors Using Dual Time-Series Imaging and Convolutional Neural Network in an Industry 4.0 Environment. IEEE Access 2020, 8, 121033–121049. [Google Scholar] [CrossRef]
- Maliuk, A.S.; Prosvirin, A.E.; Ahmad, Z.; Kim, C.H.; Kim, J.M. Novel bearing fault diagnosis using gaussian mixture model-based fault band selection. Sensors 2021, 21, 6579. [Google Scholar] [CrossRef] [PubMed]
- Zhang, R.; Tao, H.; Wu, L.; Guan, Y. Transfer Learning with Neural Networks for Bearing Fault Diagnosis in Changing Working Conditions. IEEE Access 2017, 5, 14347–14357. [Google Scholar] [CrossRef]
- Chen, J.H.; Tsai, Y.C. Encoding candlesticks as images for pattern classification using convolutional neural networks. Financ. Innov. 2020, 6, 26. [Google Scholar] [CrossRef]
- LeCun, Y.; Guyon, I.; Jackel, L.D.; Henderson, D.; Boser, B.; Howard, R.E.; Denker, J.S.; Hubbard, W.; Graf, H.P. Handwritten Digit Recognition: Applications of Neural Network Chips and Automatic Learning. IEEE Commun. Mag. 1989, 27, 41–46. [Google Scholar] [CrossRef]
- Hoang, D.T.; Kang, H.J. A Motor Current Signal-Based Bearing Fault Diagnosis Using Deep Learning and Information Fusion. IEEE Trans. Instrum. Meas. 2020, 69, 3325–3333. [Google Scholar] [CrossRef]
- LeCun, Y.; Bengio, Y.; Hinton, G. Deep learning. Nature 2015, 521, 436–444. [Google Scholar] [CrossRef]
- Lessmeier, C.; Kimotho, J.K.; Zimmer, D.; Sextro, W. Condition monitoring of bearing damage in electromechanical drive systems by using motor current signals of electric motors: A benchmark data set for data-driven classification. In Proceedings of the Third European Conference of the Prognostics and Health Management Society 2016, Bilbao, Spain, 5–8 July 2016; pp. 152–156. [Google Scholar]
- Chen, C.C.; Liu, Z.; Yang, G.; Wu, C.C.; Ye, Q. An improved fault diagnosis using 1d-convolutional neural network model. Electronics 2021, 10, 59. [Google Scholar] [CrossRef]
- Kim, B.; Lee, J. Fault Diagnosis and Noise Robustness Comparison of Rotating Machinery using CWT and CNN. Adv. Sci. Technol. Eng. Syst. J. 2021, 6, 1279–1285. [Google Scholar] [CrossRef]
- Cui, J.; Zhong, Q.; Zheng, S.; Peng, L.; Wen, J. A Lightweight Model for Bearing Fault Diagnosis Based on Gramian Angular Field and Coordinate Attention. Machines 2022, 10, 282. [Google Scholar] [CrossRef]
- Wang, Z.; Oates, T. Imaging time-series to improve classification and imputation. In Proceedings of the Twenty-Fourth International Joint Conference on Artificial Intelligence, Buenos Aires, Argentina, 25–31 July 2015; pp. 3939–3945. [Google Scholar]
- Yang, C.L.; Chen, Z.X.; Yang, C.Y. Sensor classification using convolutional neural network by encoding multivariate time series as two-dimensional colored images. Sensors 2020, 20, 168. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Xu, H.; Li, J.; Yuan, H.; Liu, Q.; Fan, S.; Li, T.; Sun, X. Human activity recognition based on gramian angular field and deep convolutional neural network. IEEE Access 2020, 8, 199393–199405. [Google Scholar] [CrossRef]
- Shi, J.; Ren, Y.; Yi, J.; Sun, W.; Tang, H.; Xiang, J. A New Multisensor Information Fusion Technique Using Processed Images: Algorithms and Application on Hydraulic Components. IEEE Trans. Instrum. Meas. 2022, 71, 3512712. [Google Scholar] [CrossRef]
- Chen, Y.; Zhang, D.; Deng, C.; Song, Y. Integrated Learning Method of Gramian Angular Field and Optimal Feature Channel Adaptive Selection for Bearing Fault Diagnosis. In Proceedings of the 2022 8th International Conference on Control, Automation and Robotics (ICCAR), Xiamen, China, 8–10 April 2022; pp. 209–217. [Google Scholar]
- Bai, Y.; Yang, J.; Wang, J.; Li, Q. Intelligent Diagnosis for Railway Wheel Flat Using Frequency-Domain Gramian Angular Field and Transfer Learning Network. IEEE Access 2020, 8, 105118–105126. [Google Scholar] [CrossRef]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Layer (Type) | Activations | Number of Parameters |
|---|---|---|
| conv1d_1 (Conv1D) | 128 × 128 × 16 | 448 |
| Batch_Norm1 (Batch Normalization 1) | 128 × 128 × 16 | 32 |
| ReLU_1 | 128 × 128 × 16 | 0 |
| max_pooling1d_1 (MaxPooling) | 64 × 64 × 16 | 0 |
| conv1d_2 (Conv1D) | 64 × 64 × 32 | 4640 |
| Batch_Norm2 (Batch Normalization 1) | 64 × 64 × 32 | 64 |
| ReLU_2 | 64 × 64 × 32 | 0 |
| max_pooling1d_2 (MaxPooling) | 32 × 33 × 32 | 0 |
| FC (Fully Connected) | 1 × 1 × 3 | 101,379 |
| SoftMax | 1 × 1 × 3 | 0 |
| Output Class | - | 0 |
| Total params: 106,563 | ||
| Trainable params: 106,563 | ||
| Non-trainable params: 0 | ||
| Type of Bearing | Bearing Code | Damage Extent | Damage Method | Label | |
|---|---|---|---|---|---|
| Healthy bearing (H) | K001 | - | - | 0 | |
| K002 | - | - | |||
| K003 | - | - | |||
| K004 | - | - | |||
| K005 | - | - | |||
| K006 | - | - | |||
| Naturally damaged Bearing | Outer ring damage (ORD) | KA04 | 1 | F | 1 |
| KA15 | 1 | P | |||
| KA16 | 2 | F | |||
| KA22 | 1 | F | |||
| KA30 | 1 | P | |||
| Inner ring damage (IRD) | KI04 | 1 | F | 2 | |
| KI14 | 1 | F | |||
| KI16 | 3 | F | |||
| KI17 | 1 | F | |||
| KI18 | 2 | F | |||
| KI21 | 1 | F | |||
| F = fatigue: pitting; P = Plastic deform: indentations. | |||||
| Operating Conditions | Rotational Speed (S) [rpm] | Load Torque (M) [Nm] | Radial Force (F) [N] | Bearing Heath Type |
|---|---|---|---|---|
| Condition 1 | 1500 | 0.7 | 1000 | H/ORD/IRD |
| Condition 2 | 900 | 0.7 | 1000 | H/ORD/IRD |
| Condition 3 | 1500 | 0.1 | 1000 | H/ORD/IRD |
| Condition 4 | 1500 | 0.7 | 400 | H/ORD/IRD |
| Training (80%) | Testing (20%) | Sample Count | Sample/ Condition | ||
|---|---|---|---|---|---|
| Dataset | Training (80%) | Validation (20%) | |||
| Condition 1 | 576 | 144 | 180 | 900 | 300 |
| Condition 2 | 576 | 144 | 180 | 900 | 300 |
| Condition 3 | 576 | 144 | 180 | 900 | 300 |
| Condition 4 | 576 | 144 | 180 | 900 | 300 |
| 2304 | 576 | 720 | |||
| Datasets | Accuracy (%) | Precision (P) | Recall (R) | f1_Score (f1) |
|---|---|---|---|---|
| GADF_1 | 99.44 | 0.99 | 0.99 | 0.99 |
| GADF_2 | 100 | 1.0 | 1.0 | 1.0 |
| GADF_3 | 100 | 1.0 | 1.0 | 1.0 |
| GADF_4 | 98.89 | 0.98 | 0.98 | 0.98 |
| GASF_1 | 100 | 1.0 | 1.0 | 1.0 |
| GASF_2 | 100 | 1.0 | 1.0 | 1.0 |
| GASF_3 | 100 | 1.0 | 1.0 | 1.0 |
| GASF_4 | 100 | 1.0 | 1.0 | 1.0 |
| Average | 99.79 | 0.996 | 0.996 | 0.996 |
| Train-Test Ratio | Accuracy (%) |
|---|---|
| 80:20 | 99.58 |
| 70:30 | 99.91 |
| 60:40 | 100 |
| 50:50 | 99.94 |
| 40:60 | 99.95 |
| 30:70 | 99.96 |
| 20:80 | 99.69 |
| Techniques | Evaluation Parameters | |||
|---|---|---|---|---|
| Precision | Recall | f1_Score | Accuracy (%) | |
| Original + 1-D CNN | 0.61 | 0.59 | 0.61 | 61.67 |
| CWT+2-D CNN | 0.61 | 0.61 | 0.61 | 64.58 |
| GAF+2-D CNN (Proposed) | 0.99 | 0.99 | 0.99 | 99.44 |
| Applied Models | Classification Accuracy (%) |
|---|---|
| WPD + SVM-PSO [63] | 86.03 |
| Information fusion + MLP [61] | 98.0 |
| Information fusion + SVM [61] | 98.3 |
| Information fusion + kNN [61] | 97.7 |
| EWT+CNN [27] | 97.3 |
| GAF+2-D CNN (proposed) | 99.58 |
| Serial No. | Ref | Aim of the Research | Methods Applied | Result | Dataset |
|---|---|---|---|---|---|
| 1 | [66] | Fault classification with vibration data | A lightweight CNN bearing fault intelligent diagnosis model combining GAF and coordinated attention (CA) (GAF-CA-CNN) | Accuracy: 99.62% Standard deviation: 0.154 | Case Western Reserve University (CWRU) bearing vibration dataset |
| 2 | [67] | Classify time-series data | Time-series data to 2D images with GAF/MTF + Tiled CNN | Mean square error (MSE): 0.00889 with GASF images | ECG, CBF, Gunpoint, SwedishLeaf, and 7 Misc |
| 3 | [55] | Fault diagnosis and classification with vibration data | GAF and MTF techniques with capsule networks (GAFMTF-CapsNet) | Accuracy: 99.81% | CWRU bearing dataset |
| 4 | [56] | Predictive maintenance framework of conveyor motors | Principal component analysis (PCA) + GAF + CNN (used PReLU activation function) | Accuracy: 100% | |
| 5 | [68] | Sensor classification | Piecewise aggregate approximation (PAA) + GDF/MTF + ConvNet | Error rate: 0.4 (Wafer dataset) 5.35 (ECG dataset) | The Wafer and ECG databases |
| 6 | [69] | Human activity recognition classification | GAF + multi-dilated kernel residual network (Fusion Mdk-ResNet) | Accuracy: 97.27% | WISDM dataset, UCI HAR dataset, and Opportunity Dataset |
| 7 | [70] | Classification of the conventional faults in hydraulic component | An improved data-enhanced Gramian angular sum field (DE-GASF) + multichannel dual attention convolutional neural network (MC-DA-CNN) | Accuracy: 96.48% (axial piston pump fault) and 98.08% (hydraulic reversing valve fault) | |
| 8 | [71] | Bearing fault diagnosis with time-series vibration data | Piecewise aggregation approximation (PAA) with GAF + convolutional channel attention residual network (CCARN) | Accuracy: 100% | |
| 9 | [72] | An FDGAF-based intelligent wheel flat diagnosis technique | Frequency-domain Gramian angular field (FDGAF) + transfer learning network | Disparities between intra-class and inter-class distance for FDGAF under all four considered velocities | |
| 10 | This work | Bearing fault classification with motor-current signal | Image segmentation+ GAF + 2-D CNN | Accuracy: 99.58% | KAT bearing dataset (current signal) |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Toma, R.N.; Piltan, F.; Im, K.; Shon, D.; Yoon, T.H.; Yoo, D.-S.; Kim, J.-M. A Bearing Fault Classification Framework Based on Image Encoding Techniques and a Convolutional Neural Network under Different Operating Conditions. Sensors 2022, 22, 4881. https://doi.org/10.3390/s22134881
Toma RN, Piltan F, Im K, Shon D, Yoon TH, Yoo D-S, Kim J-M. A Bearing Fault Classification Framework Based on Image Encoding Techniques and a Convolutional Neural Network under Different Operating Conditions. Sensors. 2022; 22(13):4881. https://doi.org/10.3390/s22134881
Chicago/Turabian StyleToma, Rafia Nishat, Farzin Piltan, Kichang Im, Dongkoo Shon, Tae Hyun Yoon, Dae-Seung Yoo, and Jong-Myon Kim. 2022. "A Bearing Fault Classification Framework Based on Image Encoding Techniques and a Convolutional Neural Network under Different Operating Conditions" Sensors 22, no. 13: 4881. https://doi.org/10.3390/s22134881
APA StyleToma, R. N., Piltan, F., Im, K., Shon, D., Yoon, T. H., Yoo, D.-S., & Kim, J.-M. (2022). A Bearing Fault Classification Framework Based on Image Encoding Techniques and a Convolutional Neural Network under Different Operating Conditions. Sensors, 22(13), 4881. https://doi.org/10.3390/s22134881