
A Centrifugal Pump Fault Diagnosis Framework Based on Supervised Contrastive Learning




Abstract
:1. Introduction
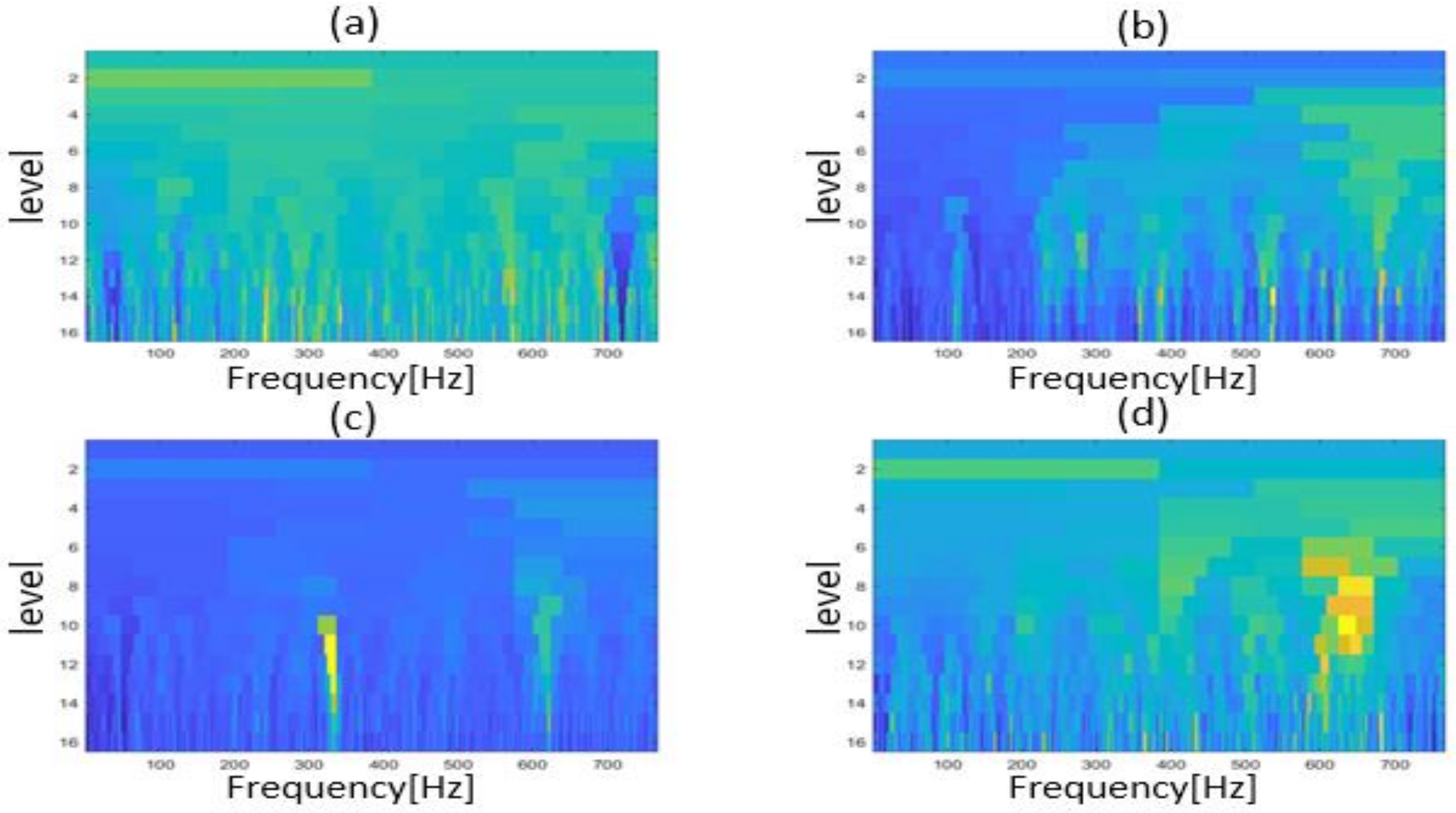
- In order to find the impactful and discriminant parts in vibration signals, we computed fast kurtograms of the time series vibration signals. The kurtograms displayed the fault-related transients in collected signals well.
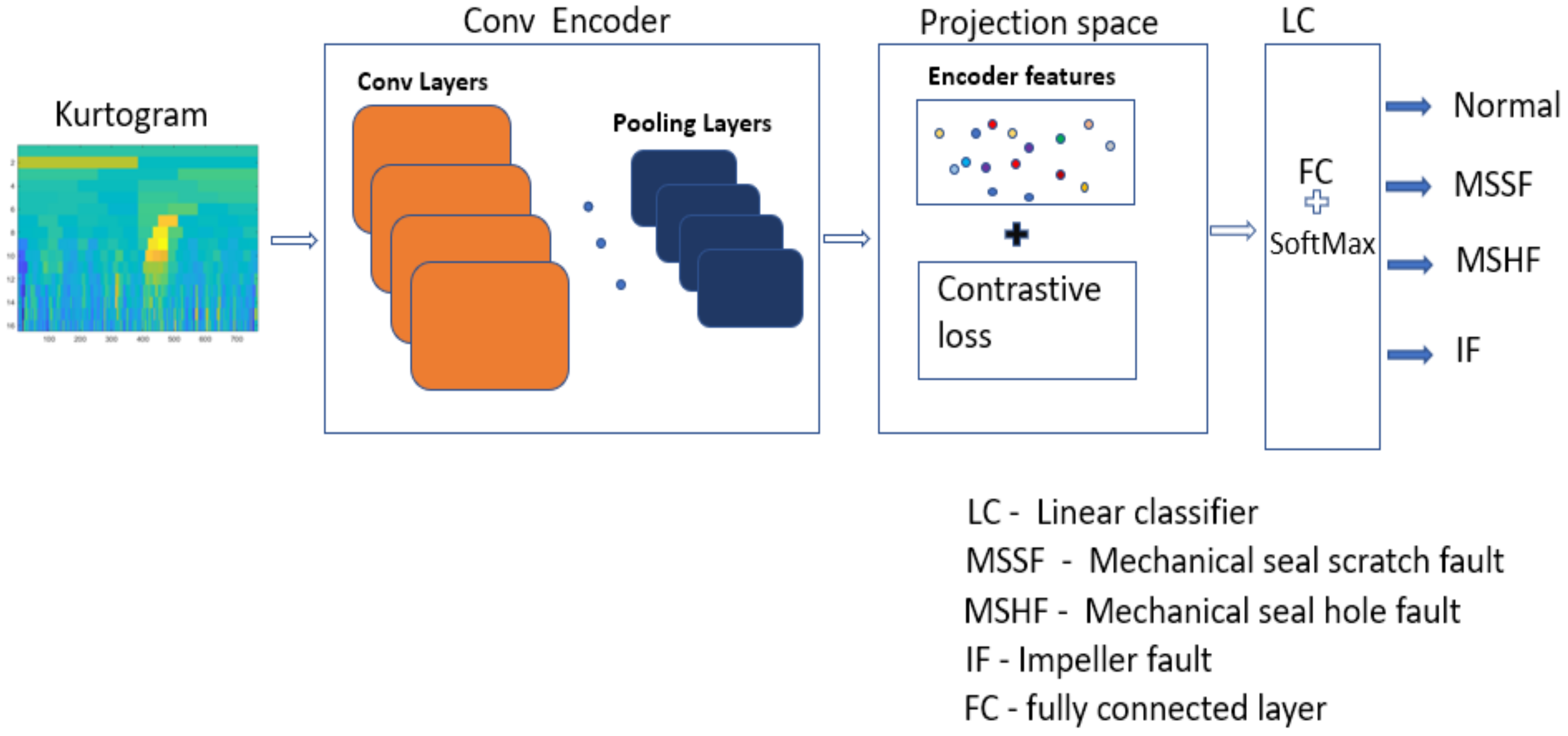
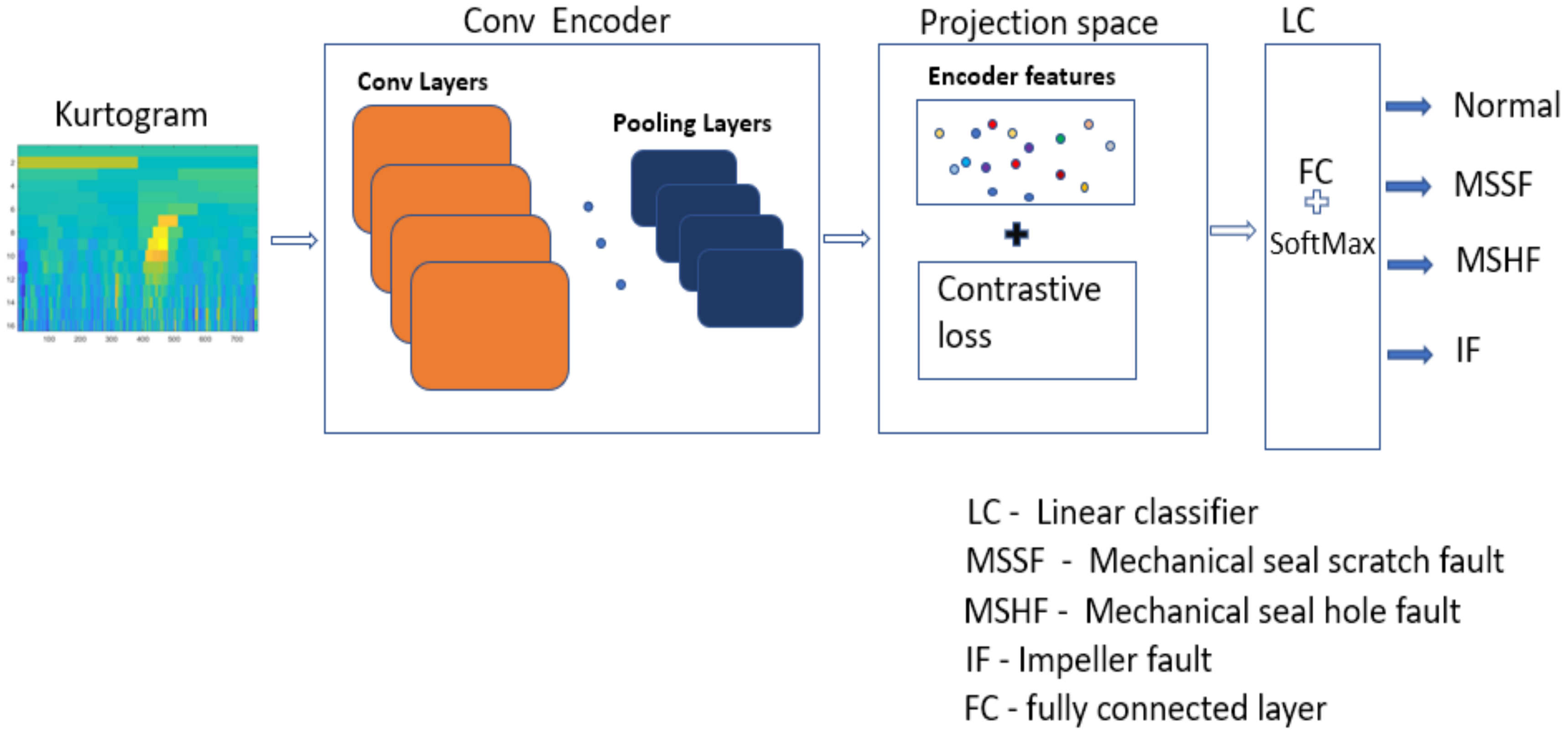
- To address the issues of conventional feature extraction methods, a convolutional encoder was introduced to produce a latent space with the help of its compressing power.
- To make the deep learning models more accurate and robust, a supervised contrastive loss function was employed, which clearly outperformed the conventional loss functions. Based on the data contrast, the classifier carried out the classification task, completing the process of faults diagnosis.
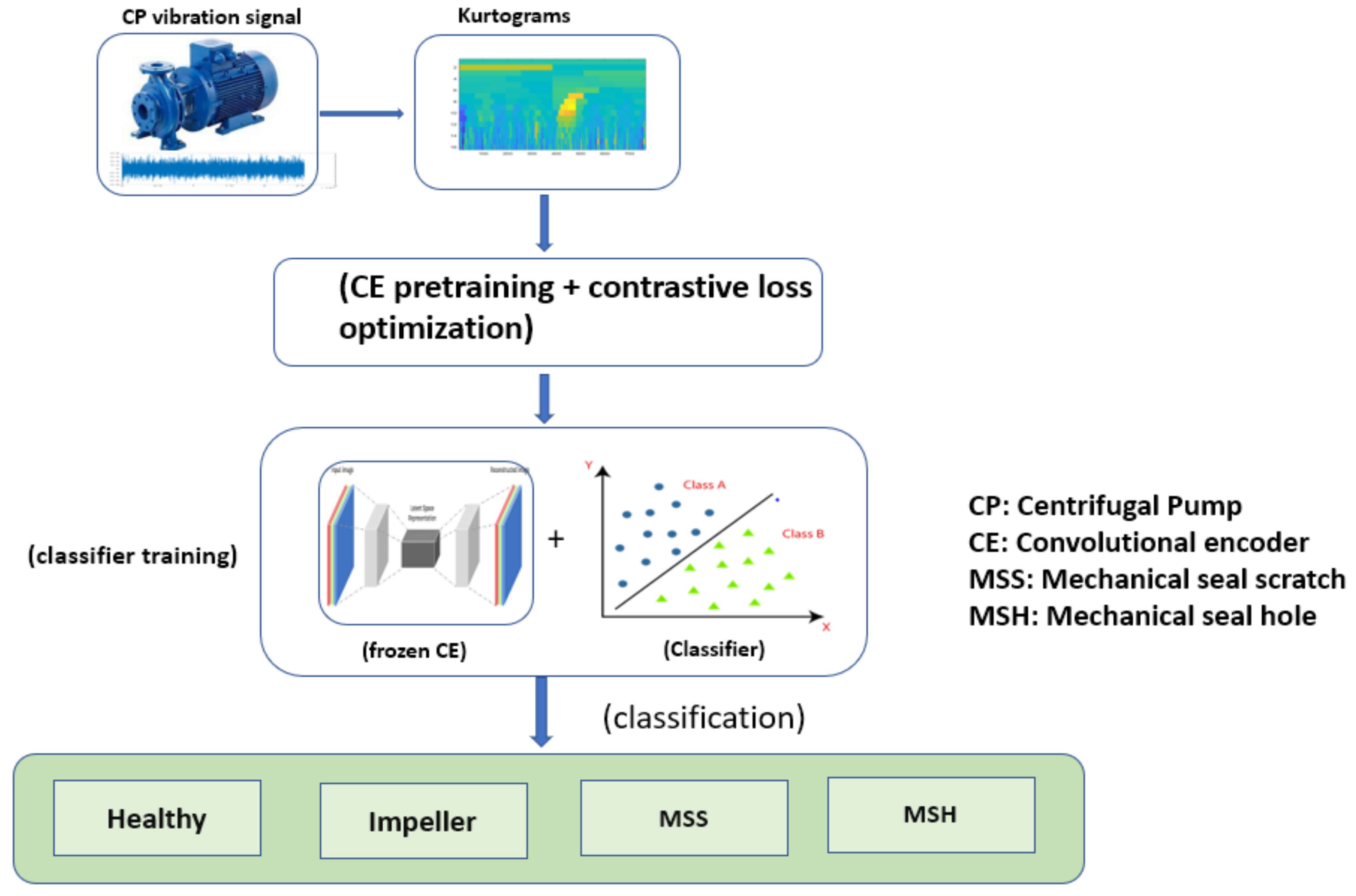
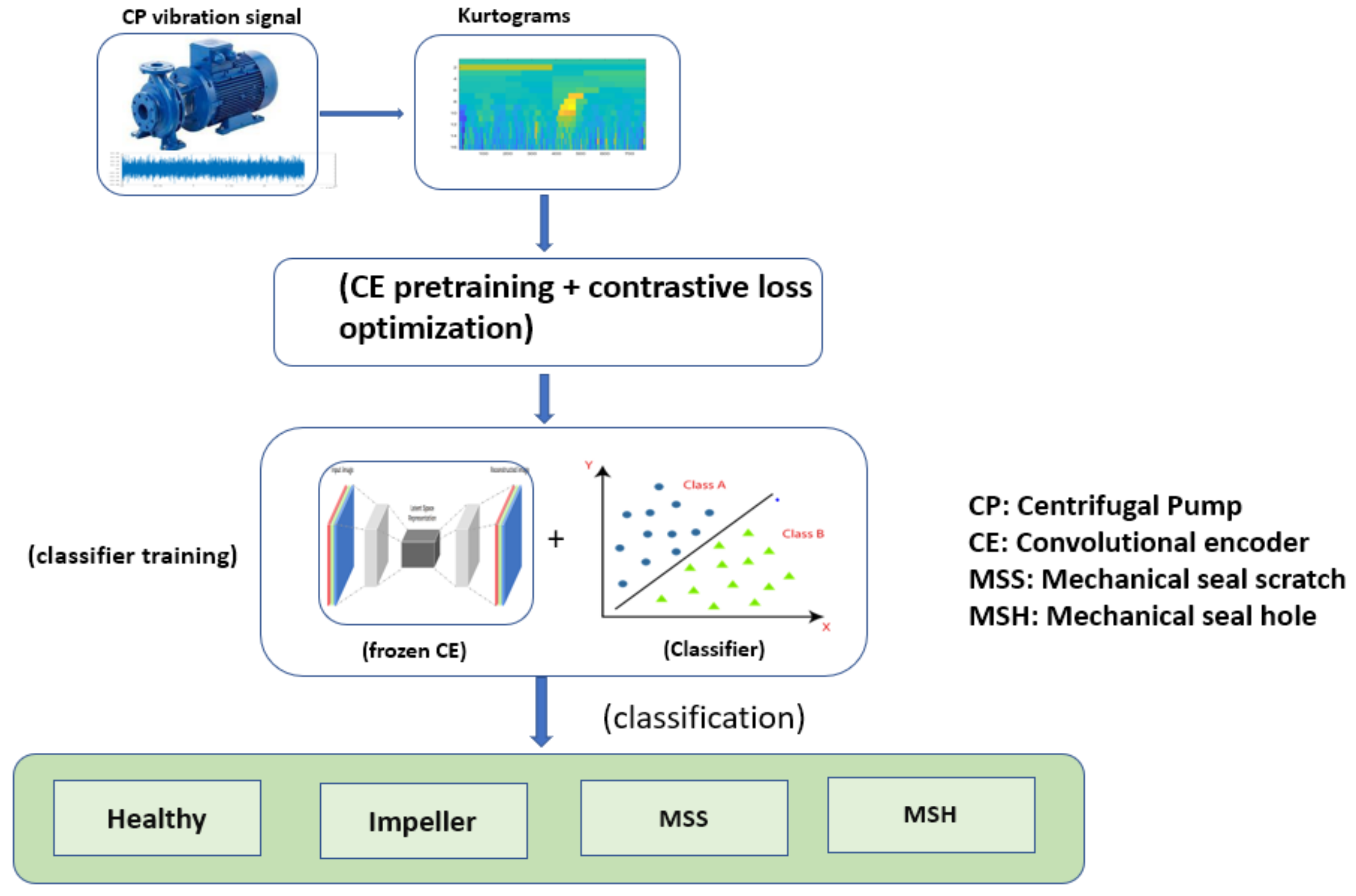
2. Proposed Method
- I
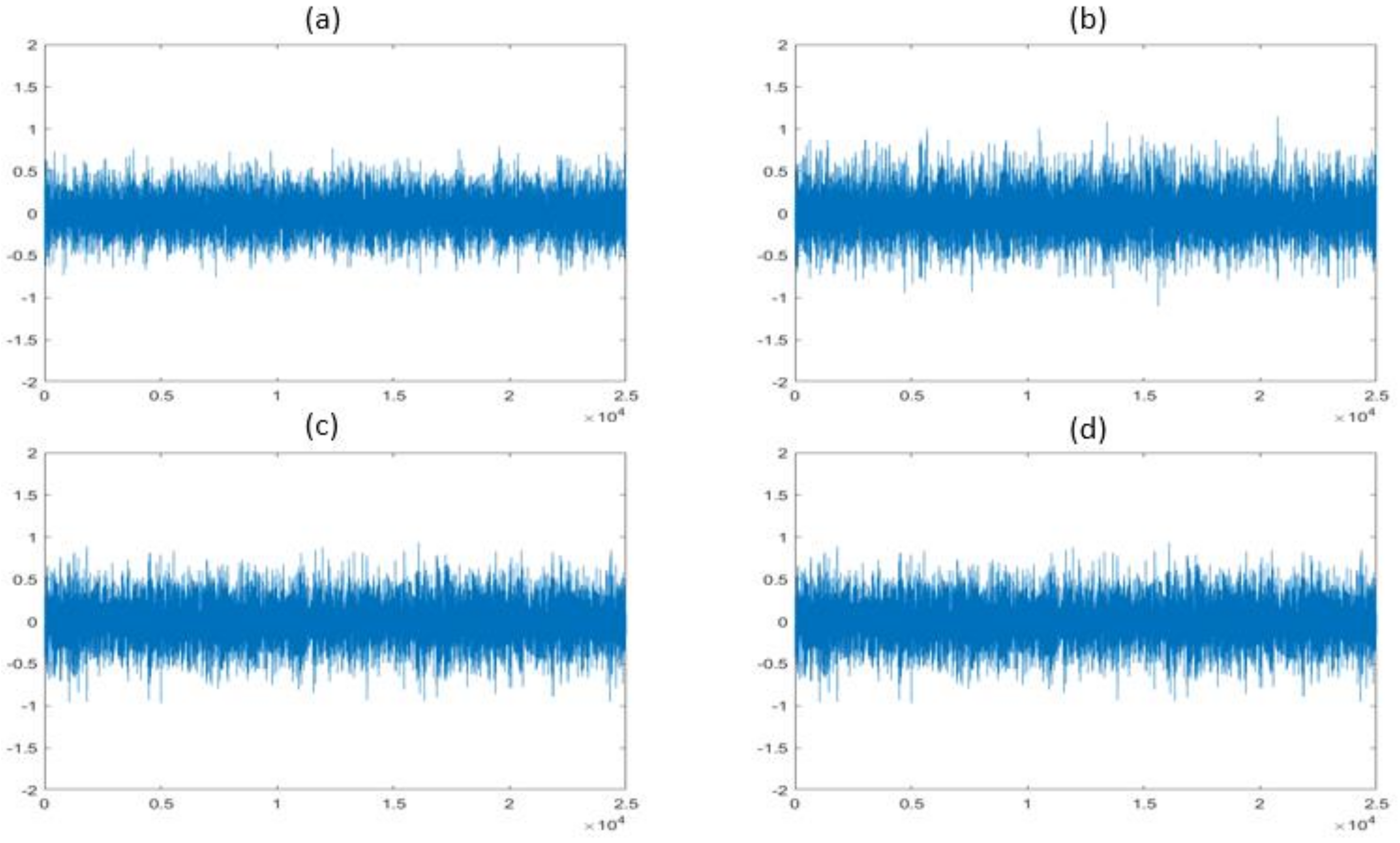
- The vibration signals under different CP conditions were collected using a data acquisition system.
- II
- The kurtograms were computed from the collected vibration signals and displayed the frequency changes in different sub-bands of the signals in the form of an image pattern used for fault diagnosis.
- III
- Next, the kurtograms images were fed to the CE with a supervised contrastive loss function. This CE was pretrained for supervised contrastive loss optimization that segregated the data of a corresponding label using data contrast.
- IV
- After the CE learnt the contrastive features of a corresponding label, the CE was kept frozen; meanwhile, a linear classifier was trained, and the classifier accomplished the task of classification.
3. Experimental Setup and Data Acquisition
3.1. Mechanical Seal Scratch Fault
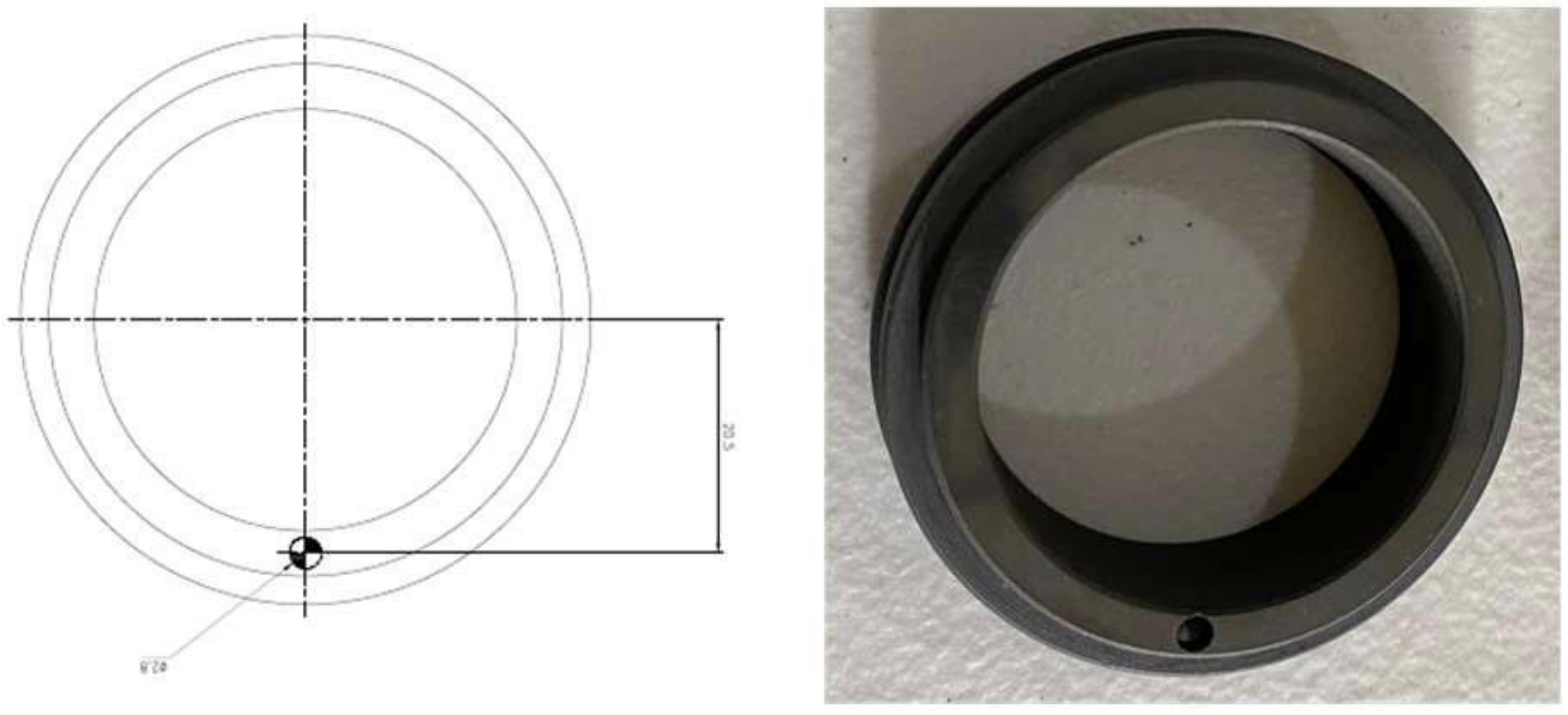
3.2. Mechanical Seal Hole Fault
3.3. Impeller Fault
4. Technical Background
4.1. Vibration Signals Representation Using Kurtograms
4.2. Convolutional Encoder with Contrastive Learning
4.3. Fault Identification Using a Linear Classifier
5. Results and Discussion
Performance and Comparison
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Alabied, S.; Hamomd, O.; Daraz, A.; Gu, F.; Ball, A.D. Fault diagnosis of centrifugal pumps based on the intrinsic time-scale decomposition of motor current signals. In Proceedings of the ICAC 2017–2017 23rd IEEE International Conference on Automation and Computing: Addressing Global Challenges through Automation and Computing, Huddersfield, UK, 7–8 September 2017; pp. 7–8. [Google Scholar] [CrossRef]
- Ahmad, Z.; Prosvirin, A.E.; Kim, J.; Kim, J.M. Multistage Centrifugal Pump Fault Diagnosis by Selecting Fault Characteristic Modes of Vibration and Using Pearson Linear Discriminant Analysis. IEEE Access 2020, 8, 223030–223040. [Google Scholar] [CrossRef]
- Prosvirin, A.E.; Ahmad, Z.; Kim, J.M. Global and Local Feature Extraction Using a Convolutional Autoencoder and Neural Networks for Diagnosing Centrifugal Pump Mechanical Faults. IEEE Access 2021, 9, 65838–65854. [Google Scholar] [CrossRef]
- Lei, Y. Intelligent Fault Diagnosis and Remaining Useful Life Prediction of Rotating Machinery; Butterworth-Heinemann: Amsterdam, The Netherlands, 2016; pp. 12–86. [Google Scholar] [CrossRef]
- Rapur, J.S.; Tiwari, R. Experimental fault diagnosis for known and unseen operating conditions of centrifugal pumps using MSVM and WPT based analyses. Meas. J. Int. Meas. Confed. 2019, 147, 106809. [Google Scholar] [CrossRef]
- Panda, A.K.; Rapur, J.S.; Tiwari, R. Prediction of flow blockages and impending cavitation in centrifugal pumps using Support Vector Machine (SVM) algorithms based on vibration measurements. Meas. J. Int. Meas. Confed. 2018, 130, 44–56. [Google Scholar] [CrossRef]
- Jia, F.; Lei, Y.; Shan, H.; Lin, J. Early fault diagnosis of bearings using an improved spectral kurtosis by maximum correlated kurtosis deconvolution. Sensors 2015, 15, 29363–29377. [Google Scholar] [CrossRef] [PubMed]
- Zhou, P.; Peng, Z.; Chen, S.; Yang, Y.; Zhang, W. Non-stationary signal analysis based on general parameterized time–frequency transform and its application in the feature extraction of a rotary machine. Front. Mech. Eng. 2018, 13, 292–300. [Google Scholar] [CrossRef]
- Kang, M.; Kim, J.; Wills, L.M.; Kim, J.M. Time-varying and multiresolution envelope analysis and discriminative feature analysis for bearing fault diagnosis. IEEE Trans. Ind. Electron. 2015, 62, 7749–7761. [Google Scholar] [CrossRef]
- Prosvirin, A.E.; Islam, M.; Kim, J.; Kim, J.M. Rub-impact fault diagnosis using an effective imf selection technique in ensemble empirical mode decomposition and hybrid feature models. Sensors 2018, 18, 2040. [Google Scholar] [CrossRef] [Green Version]
- Piltan, F.; Prosvirin, A.E.; Sohaib, M.; Saldivar, B.; Kim, J.M. An SVM-based neural adaptive variable structure observer for fault diagnosis and fault-tolerant control of a robot manipulator. Appl. Sci. 2020, 10, 1344. [Google Scholar] [CrossRef]
- Ahmad, Z.; Rai, A.; Hasan, M.J.; Kim, C.H.; Kim, J.M. A Novel Framework for Centrifugal Pump Fault Diagnosis by Selecting Fault Characteristic Coefficients of Walsh Transform and Cosine Linear Discriminant Analysis. IEEE Access 2021, 9, 150128–150141. [Google Scholar] [CrossRef]
- Ahmad, Z.; Nguyen, T.K.; Ahmad, S.; Nguyen, C.D.; Kim, J.M. Multistage centrifugal pump fault diagnosis using informative ratio principal component analysis. Sensors 2022, 22, 179. [Google Scholar] [CrossRef] [PubMed]
- Djeziri, M.A.; Djedidi, O.; Morati, N.; Seguin, J.L.; Bendahan, M.; Contaret, T. A temporal-based SVM approach for the detection and identification of pollutant gases in a gas mixture. Appl. Intell. 2022, 52, 6065–6078. [Google Scholar] [CrossRef]
- Liu, Y.; Ding, W.; Feng, Y.; Guo, Y. Ensembled mechanical fault recognition system based on deep learning algorithm. J. Vibroengineering 2021, 23, 1318–1331. [Google Scholar] [CrossRef]
- Chen, H.; Huang, W.; Huang, J.; Cao, C.; Yang, L.; He, Y.; Zeng, L. Multi-fault Condition Monitoring of Slurry Pump with Principle Component Analysis and Sequential Hypothesis Test. Int. J. Pattern Recognit. Artif. Intell. 2020, 34, 2059019. [Google Scholar] [CrossRef]
- Wilhelm, Y.; Reimann, P.; Gauchel, W.; Mitschang, B. Overview on Hybrid Approaches to Fault Detection and Diagnosis: Combining Data-driven, Physics-based and Knowledge-based Models. Procedia CIRP 2020, 99, 278–283. [Google Scholar] [CrossRef]
- Qu, X.Y.; Zeng, P.; Xu, C.C.; Fu, D.D. DropOut denoising autoencoder-based fault diagnosis for grinding system. Kongzhi Yu Juece/Control. Decis. 2018, 33, 1662–1666. [Google Scholar] [CrossRef]
- Jiang, G.; He, H.; Yan, J.; Xie, P. Multiscale Convolutional Neural Networks for Fault Diagnosis of Wind Turbine Gearbox. IEEE Trans. Ind. Electron. 2019, 66, 3196–3207. [Google Scholar] [CrossRef]
- Guo, C.; Li, L.; Hu, Y.; Yan, J. A Deep Learning Based Fault Diagnosis Method with Hyperparameter Optimization by Using Parallel Computing. IEEE Access 2020, 8, 131248–131256. [Google Scholar] [CrossRef]
- Khosla, P.; Teterwak, P.; Wang, C.; Sarna, A.; Tian, Y.; Isola, P.; Maschinot, A.; Liu, C.; Krishnan, D. Supervised contrastive learning. In Proceedings of the 34rd International Conference on Neural Information Processing Systems, Online, 6–12 December 2019; pp. 1–13. [Google Scholar]
- Antoni, J. Fast computation of the kurtogram for the detection of transient faults. Mech. Syst. Signal Processing 2007, 21, 108–124. [Google Scholar] [CrossRef]
- Antoni, J.; Randall, R.B. The spectral kurtosis: Application to the vibratory surveillance and diagnostics of rotating machines. Mech. Syst. Signal Processing 2006, 20, 308–331. [Google Scholar] [CrossRef]
- Geng, Y.; Wang, Z.; Jia, L.; Qin, Y.; Chen, X. Bogie fault diagnosis under variable operating conditions based on fast kurtogram and deep residual learning towards imbalanced data. Meas. J. Int. Meas. Confed. 2020, 166, 108191. [Google Scholar] [CrossRef]
- Dwyer, R. Detection of non-Gaussian signals by frequency domain Kurtosis estimation. In Proceedings of the ICASSP ’83. IEEE International Conference on Acoustics, Speech, and Signal Processing, Boston, MA, USA, 14–16 April 1983; Volume 8, pp. 607–610. [Google Scholar] [CrossRef]
- Jaiswal, A.; Babu, A.R.; Zadeh, M.Z.; Banerjee, D.; Makedon, F. A Survey on Contrastive Self-Supervised Learning. Technologies 2020, 9, 2. [Google Scholar] [CrossRef]
- Hadsell, R.; Chopra, S.; LeCun, Y. Dimensionality reduction by learning an invariant mapping. In Proceedings of the IEEE Computer Society Conference on Computer Vision and Pattern Recognition, New York, NY, USA, 17–22 June 2006; Volume 2, pp. 1735–1742. [Google Scholar] [CrossRef]
- Gomez, R.; Gomez, L.; Gibert, J.; Karatzas, D. Learning to learn from web data through deep semantic embeddings. In Proceedings of the European Conference on Computer Vision (ECCV) Workshops, Munich, Germany, 8–14 September 2018; Lecture Notes in Computer Science. Springer: Cham, Switzerland, 2019; Volume 11134, pp. 514–529. [Google Scholar] [CrossRef]
- Bachman, P.; Hjelm, R.D.; Buchwalter, W. Learning representations by maximizing mutual information across views. In Proceedings of the 33rd International Conference on Neural Information Processing Systems, Vancouver, BC, Canada, 8–14 December 2019; Volume 32. [Google Scholar]
- Dosovitskiy, A.; Springenberg, J.T.; Riedmiller, M.; Brox, T. Discriminative unsupervised feature learning with convolutional neural networks. Adv. Neural Inf. Processing Syst. 2014, 1, 766–774. [Google Scholar] [CrossRef] [PubMed]
- Franceschi, J.Y.; Dieuleveut, A.; Jaggi, M. Unsupervised scalable representation learning for multivariate time series. In Proceedings of the 33rd International Conference on Neural Information Processing Systems, Vancouver, BC, Canada, 8–14 December 2019; Volume 32. [Google Scholar]
- Shao, H.; Jiang, H.; Zhao, H.; Wang, F. A novel deep autoencoder feature learning method for rotating machinery fault diagnosis. Mech. Syst. Signal Processing 2017, 95, 187–204. [Google Scholar] [CrossRef]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Tool | Specification |
|---|---|
| Accelerometer (622b01) | 0.42–10 kHz frequency range 100 mV/g (10, 2 mV/(m/s2)) ± 5% of sensitivity |
| DAQ system (NI 9234) | 0–13.1 MHz range of frequency generator having four input analogue channels with a 24-bit resolution power |
| Layer Number | Filters Number | Kernel | Output | Activation ftn |
|---|---|---|---|---|
| 1, Conv. | 8 Filters | 3 × 3 | 128 × 128 × 8 | ReLU |
| 2, Maxpool | 8 Filters | 2 × 2 | 64 × 64 × 8 | - |
| 3, Conv. | 8 Filters | 3 × 3 | 64 × 64 × 8 | ReLU |
| 4, Maxpool | 8 Filters | 2 × 2 | 32 × 32 × 8 | - |
| 5, Conv. | 8 Filters | 3 × 3 | 32 × 32 × 8 | ReLU |
| 6, Maxpool | 8 Filters | 2 × 2 | 16 × 16 × 8 | - |
| 7, Conv. | 8 Filters | 3 × 3 | 16 × 16 × 8 | ReLU |
| 8, Maxpool | 8 Filters | 2 × 2 | 8 × 8 × 8 | - |
| 9, Flatten | 512 Nodes | - | 512 | |
| 10, Reshape | - | - |
| Metric | Proposed | SAE Based Fault Detection Scheme | DAE Feature Learning Method |
|---|---|---|---|
| Accuracy | 99.1% | 92.75% | 90.4% |
| Recall | 98.95% | 91.4% | 89.5% |
| Precision | 99% | 90.2% | 91% |
| F1 score | 98.75% | 90.8% | 90.5% |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ahmad, S.; Ahmad, Z.; Kim, J.-M. A Centrifugal Pump Fault Diagnosis Framework Based on Supervised Contrastive Learning. Sensors 2022, 22, 6448. https://doi.org/10.3390/s22176448
Ahmad S, Ahmad Z, Kim J-M. A Centrifugal Pump Fault Diagnosis Framework Based on Supervised Contrastive Learning. Sensors. 2022; 22(17):6448. https://doi.org/10.3390/s22176448
Chicago/Turabian StyleAhmad, Sajjad, Zahoor Ahmad, and Jong-Myon Kim. 2022. "A Centrifugal Pump Fault Diagnosis Framework Based on Supervised Contrastive Learning" Sensors 22, no. 17: 6448. https://doi.org/10.3390/s22176448
APA StyleAhmad, S., Ahmad, Z., & Kim, J.-M. (2022). A Centrifugal Pump Fault Diagnosis Framework Based on Supervised Contrastive Learning. Sensors, 22(17), 6448. https://doi.org/10.3390/s22176448