
A New Approach for Including Social Conventions into Social Robots Navigation by Using Polygonal Triangulation and Group Asymmetric Gaussian Functions

 ,
,  ,
,  ,
, 
Abstract
:1. Introduction
2. Related Work
3. Materials and Methods
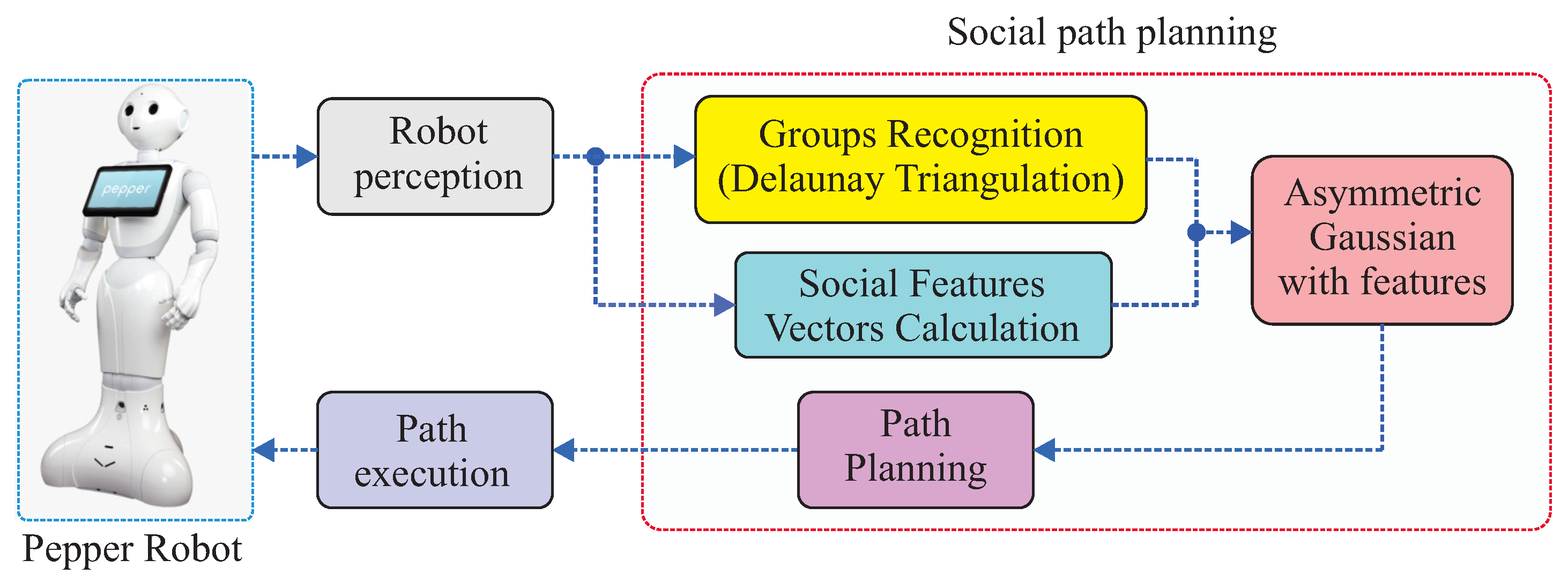
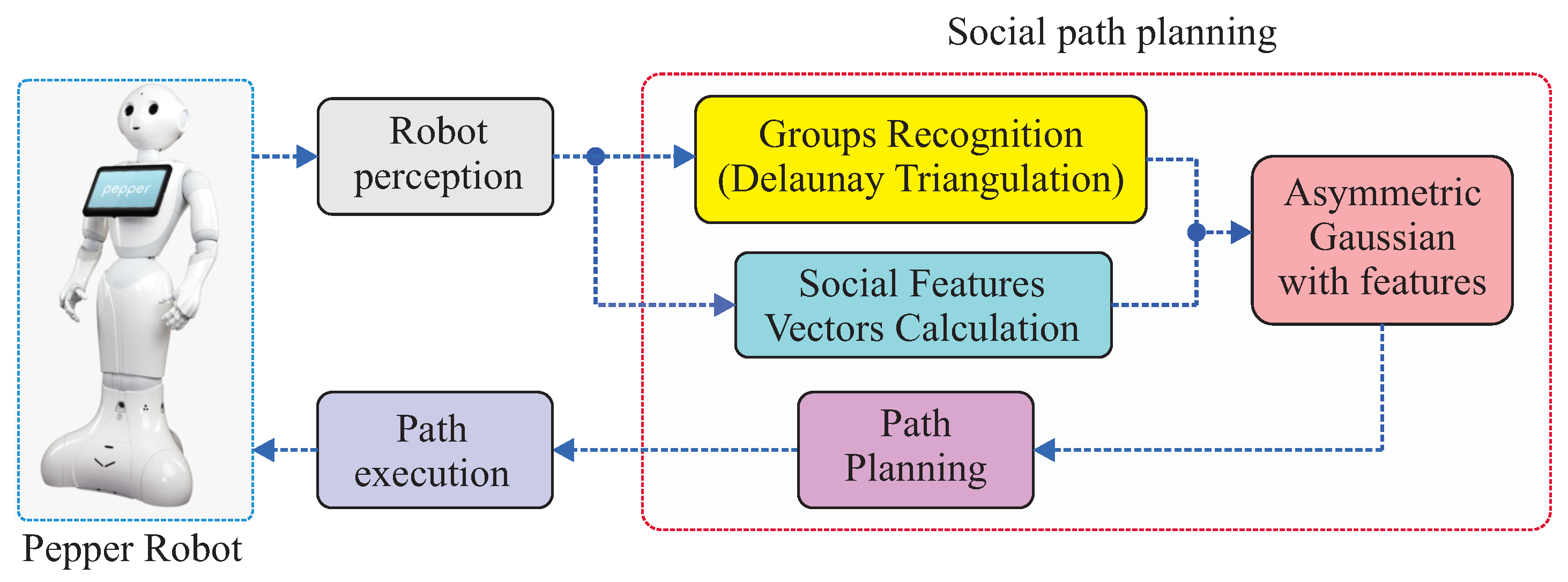
3.1. Social Awareness Path Planning Approach
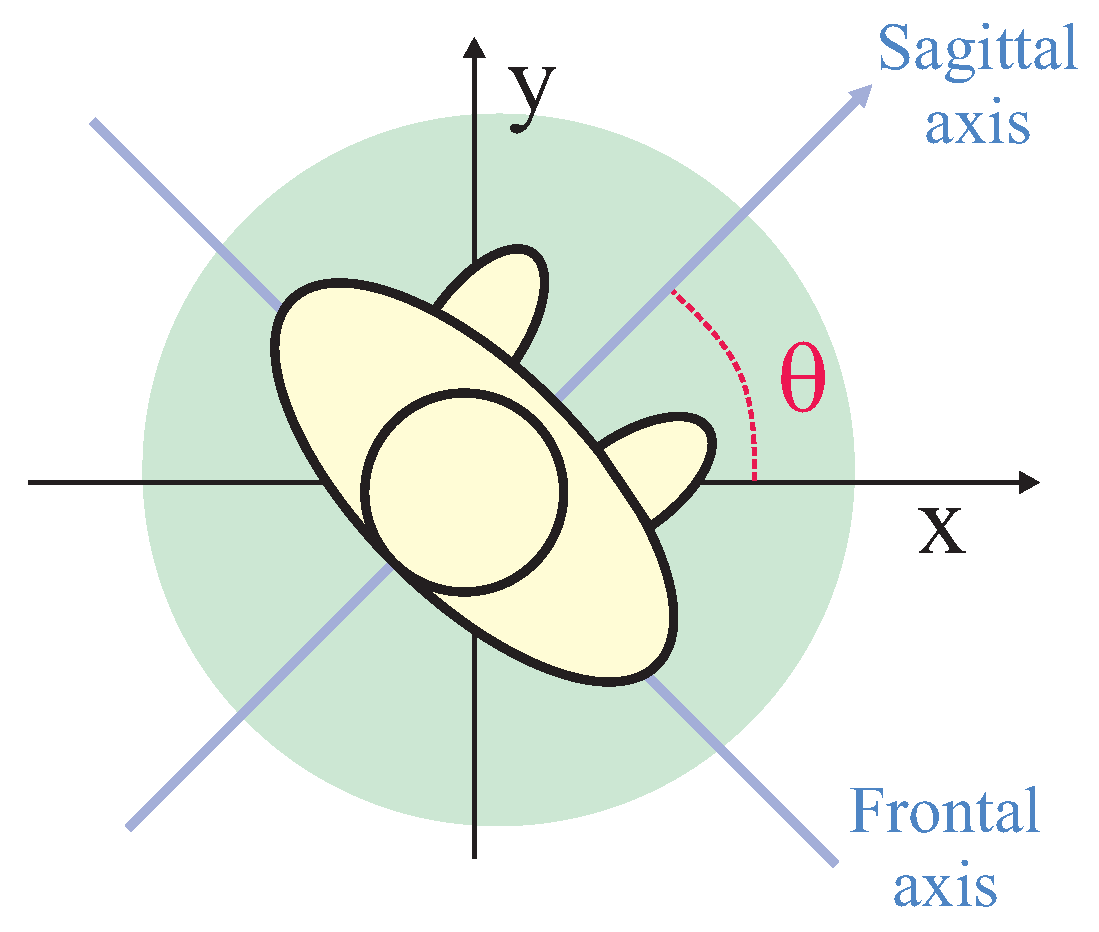
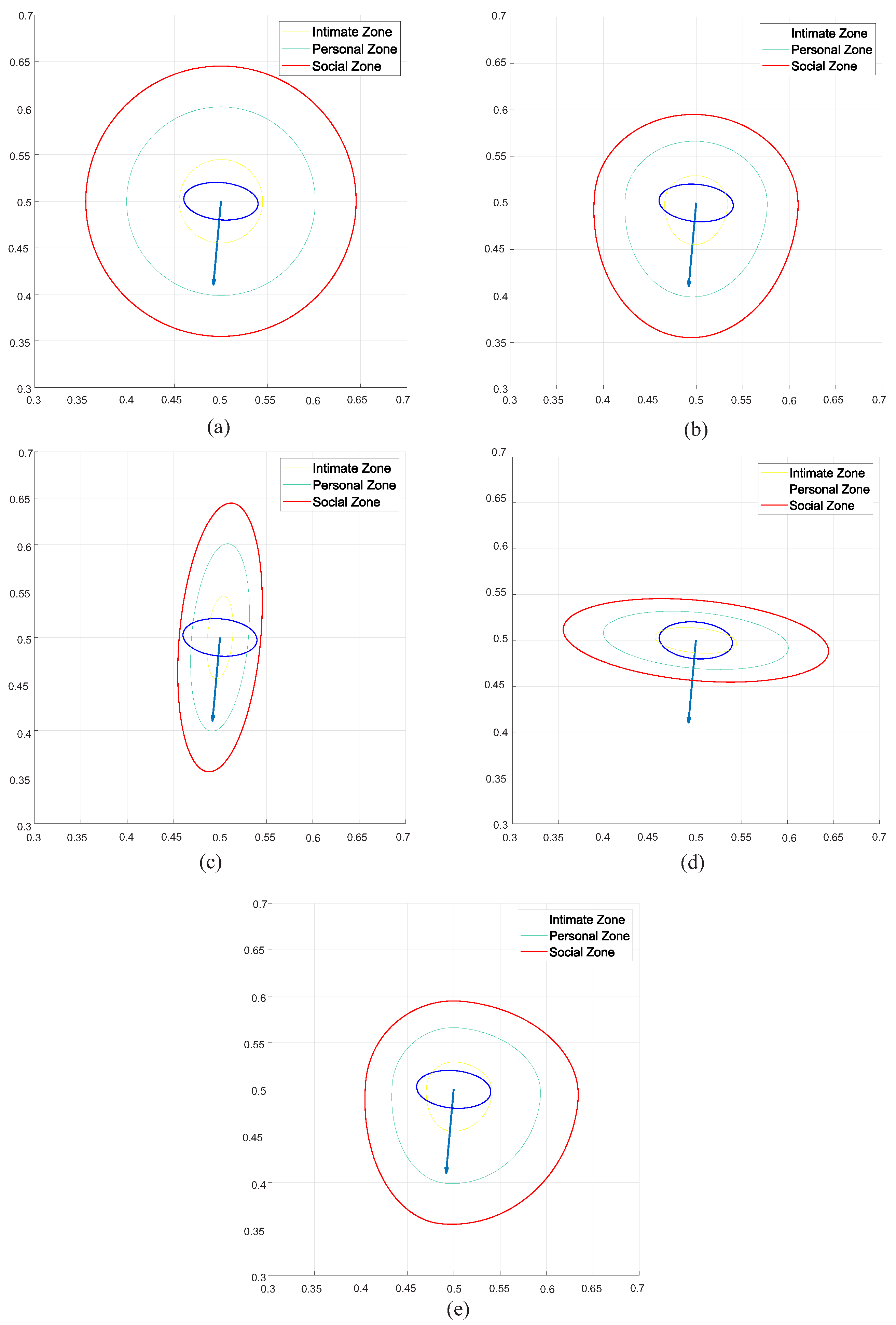
- Asymmetric Gaussian functions can be modified dynamically by using socialization features to change the variance value on each side of the sagittal and frontal axis, as explained in Section 3.3.3.
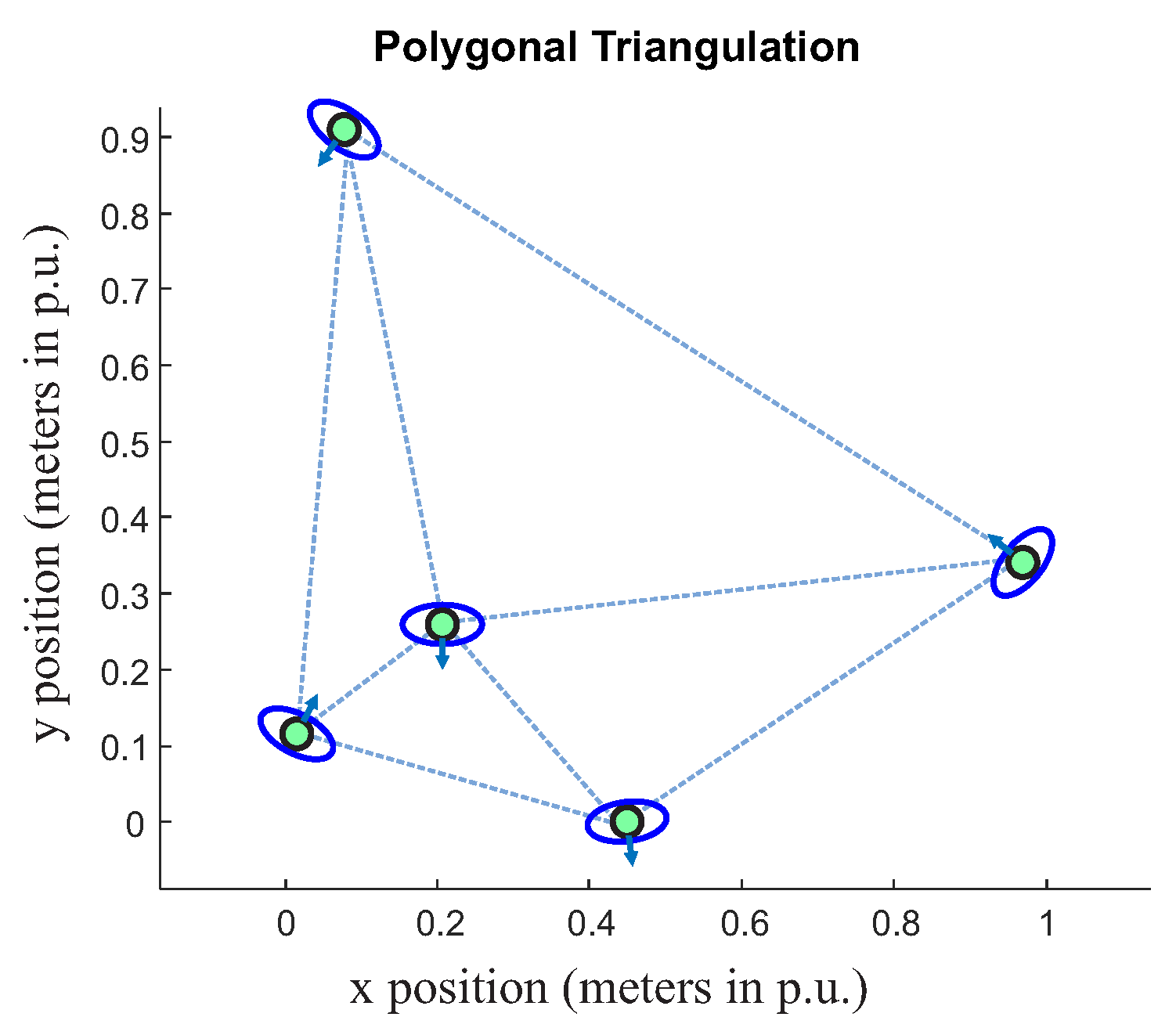
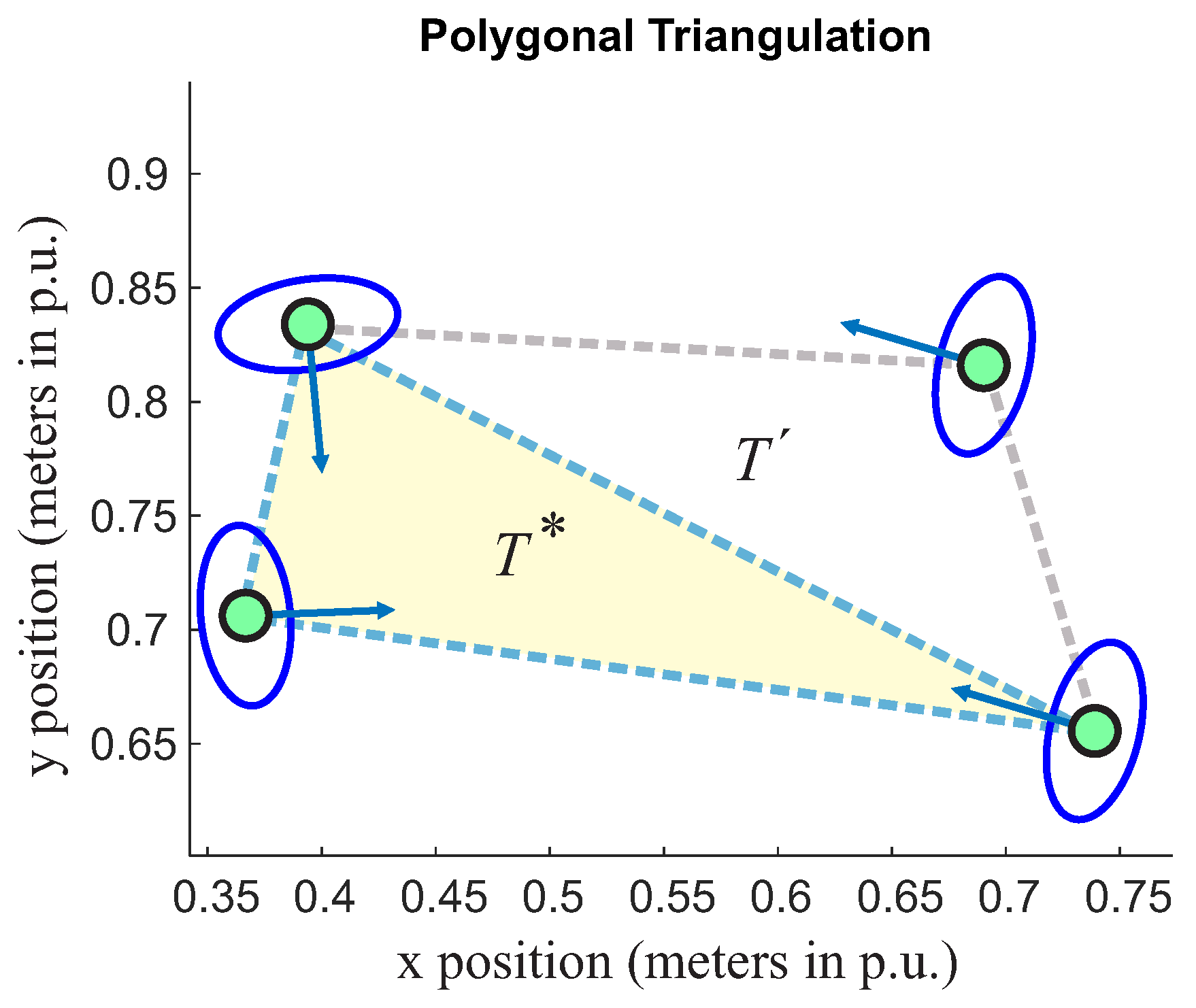
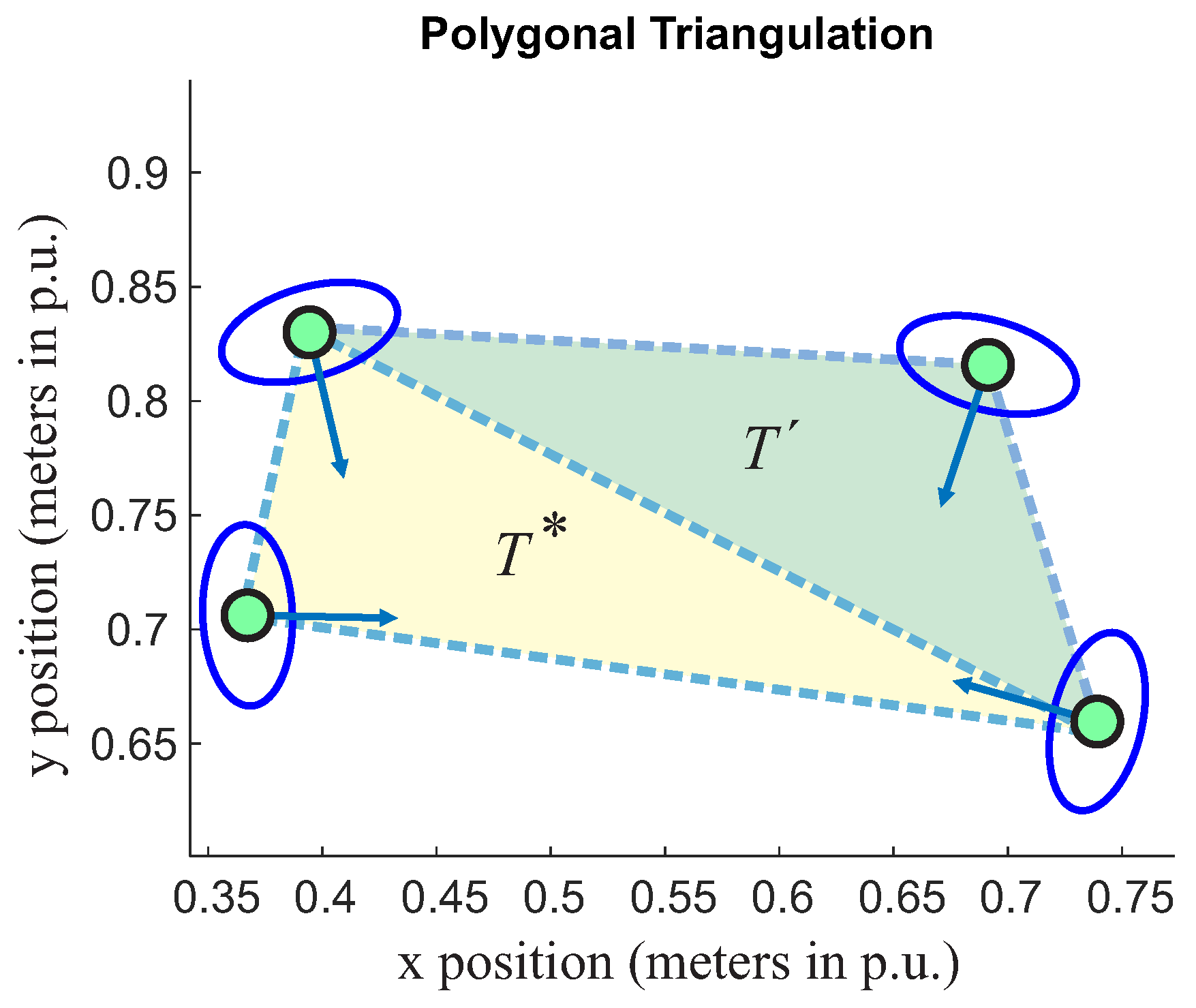
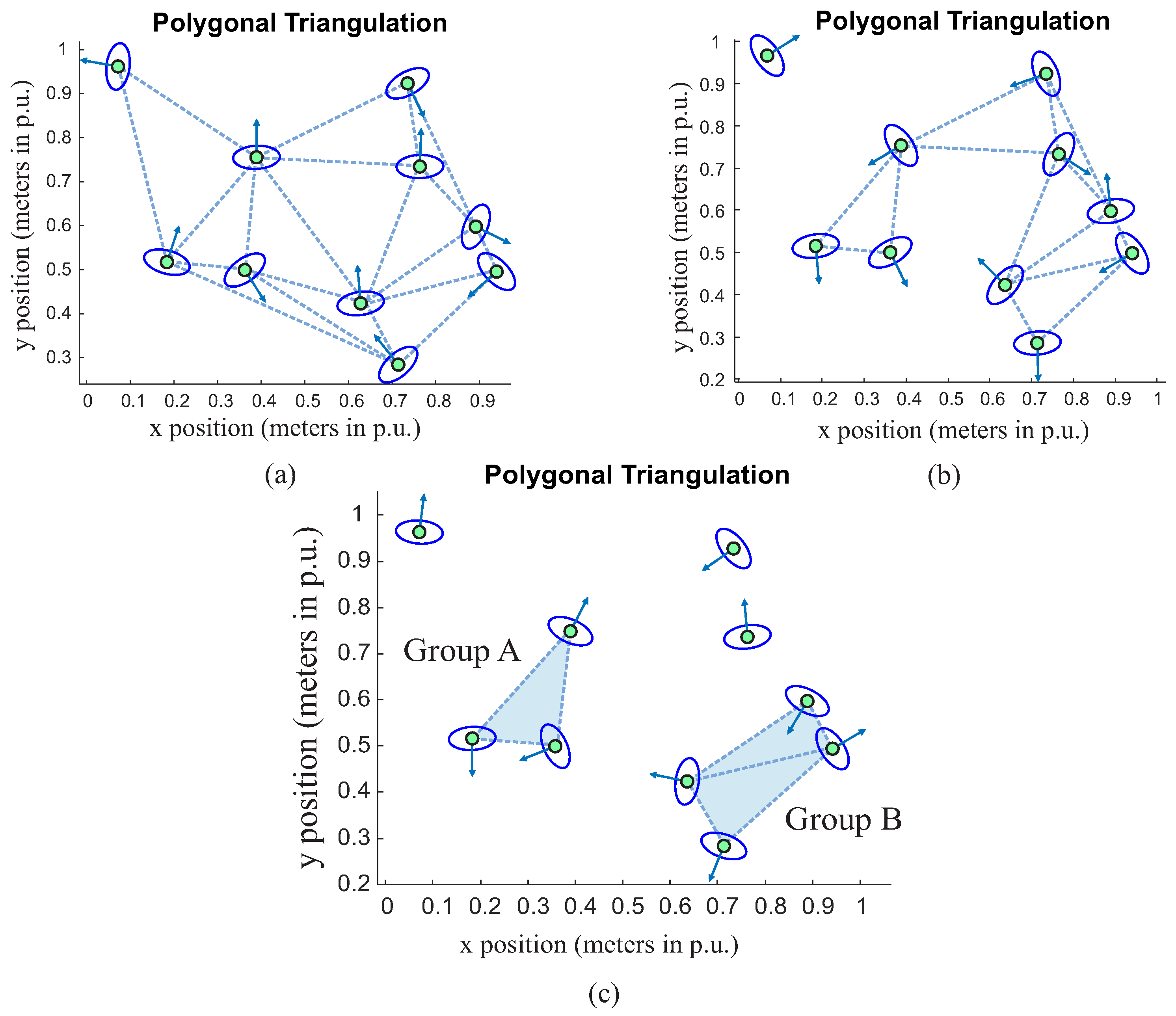
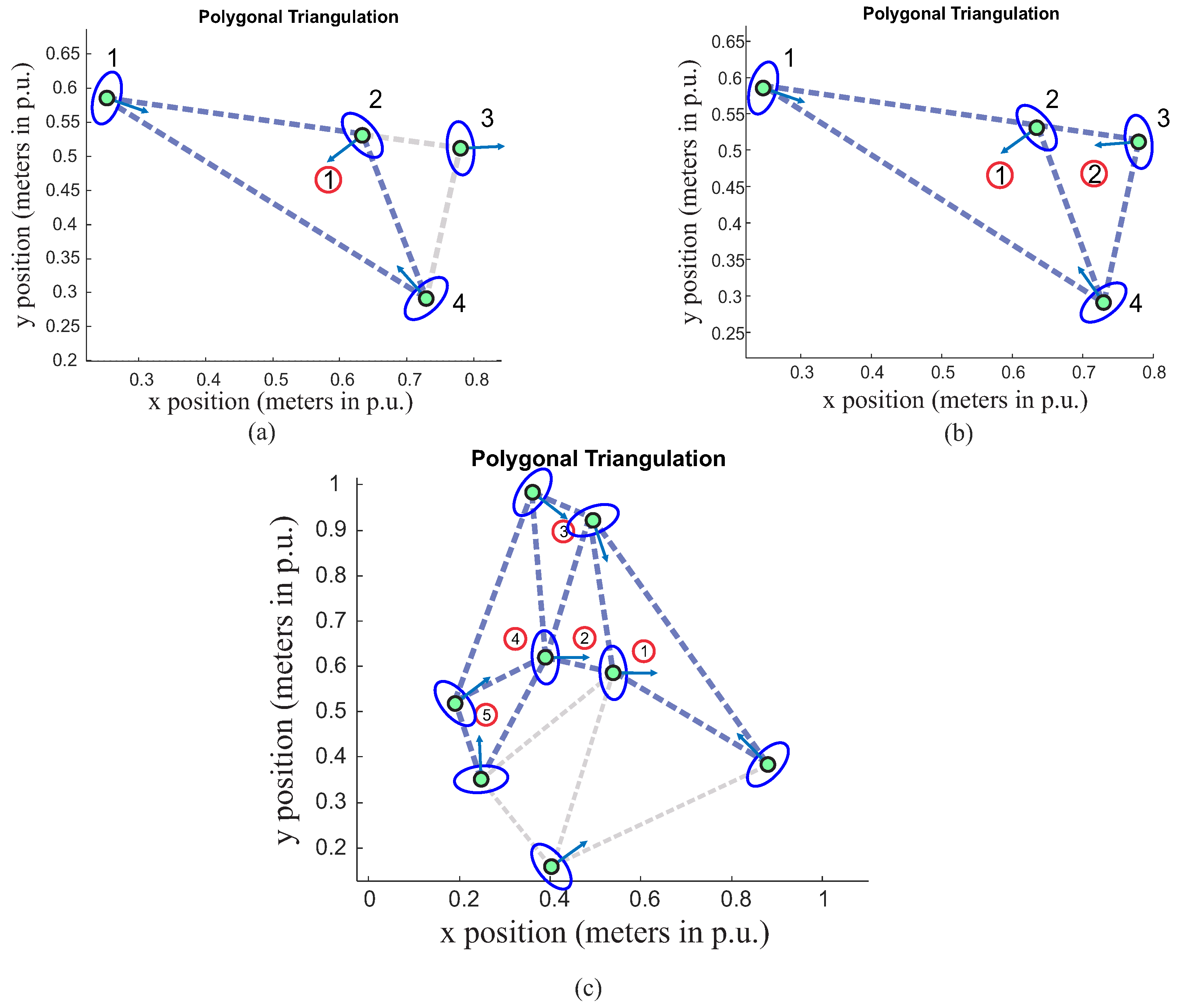
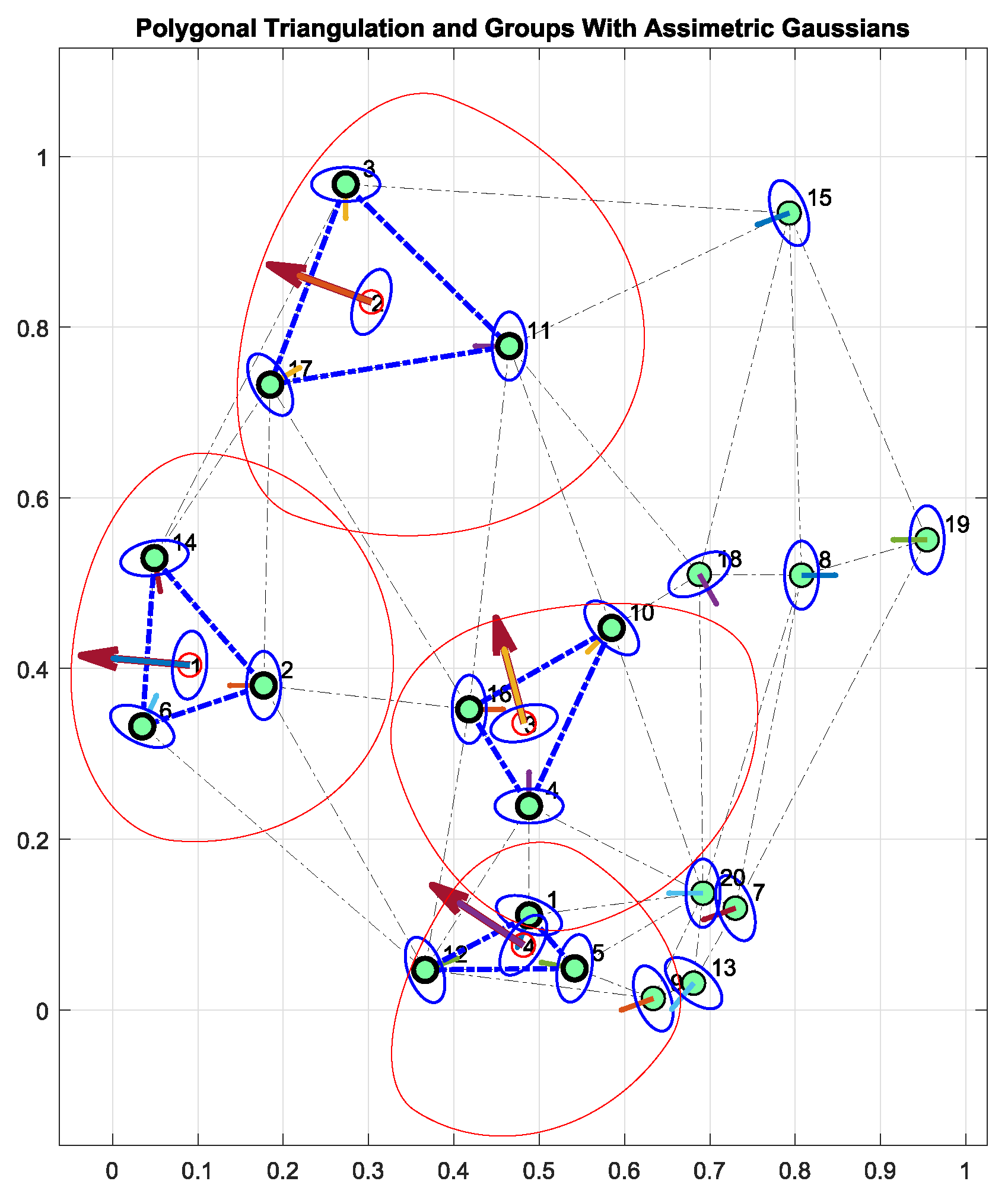
- Groups of people are recognized by using polygonal triangulation, which includes proxemic rules and people-orientation to determine what a group is constituted of, as explained in Section 3.2.
- Each group (recognized using polygonal triangulation) or person alone has its own asymmetric Gaussian functions; individual Gaussian functions are not merged, so a group is considered as an individual with its own proxemics rules. In addition, social features are inherited from humans who are part of each group) to groups.
- Any amount of socialization features with different types of influence on each side of the Gaussian function could be considered, so any form of modeling the personal space, and also any type of approach for modifying a Gaussian function based on cultural, social, personal, etc., characteristics could be applied.
3.2. Groups Recognition
3.3. Features for Social Awareness
3.3.1. Socialization Features
3.3.2. Asymmetric Gaussian Function
3.3.3. Adaptive Gaussian Using Features
3.3.4. Adaptive Gaussians in Groups of People
- Position of the group is the midpoint of all the positions of persons included in the group.
- Orientation of the group is the mean of orientations of all the individuals who compose the group.
- The group shape is defined as an irregular quadrilateral, where the four vertices are calculated considering the position and orientation of the group. From the orientation, four quadrants are defined, and on each quadrant, the position of the farthest person from the center of the group is calculated. Each of the four founded positions is labeled as left, right, rear, and front points, depending on the quadrant.
- The group has one unique feature value, which can be calculated in the perception module of the robot by combining the feature values of individuals by averaging, finding the statistical mode, and so on.
4. Results
- The proposed groups classification method based on Delaunay triangulation;
- Inclusion of people orientation in the proposed group classification method;
- Asymmetric Gaussian application with socialization features to define personal and group zones;
- The proposed navigation strategy.
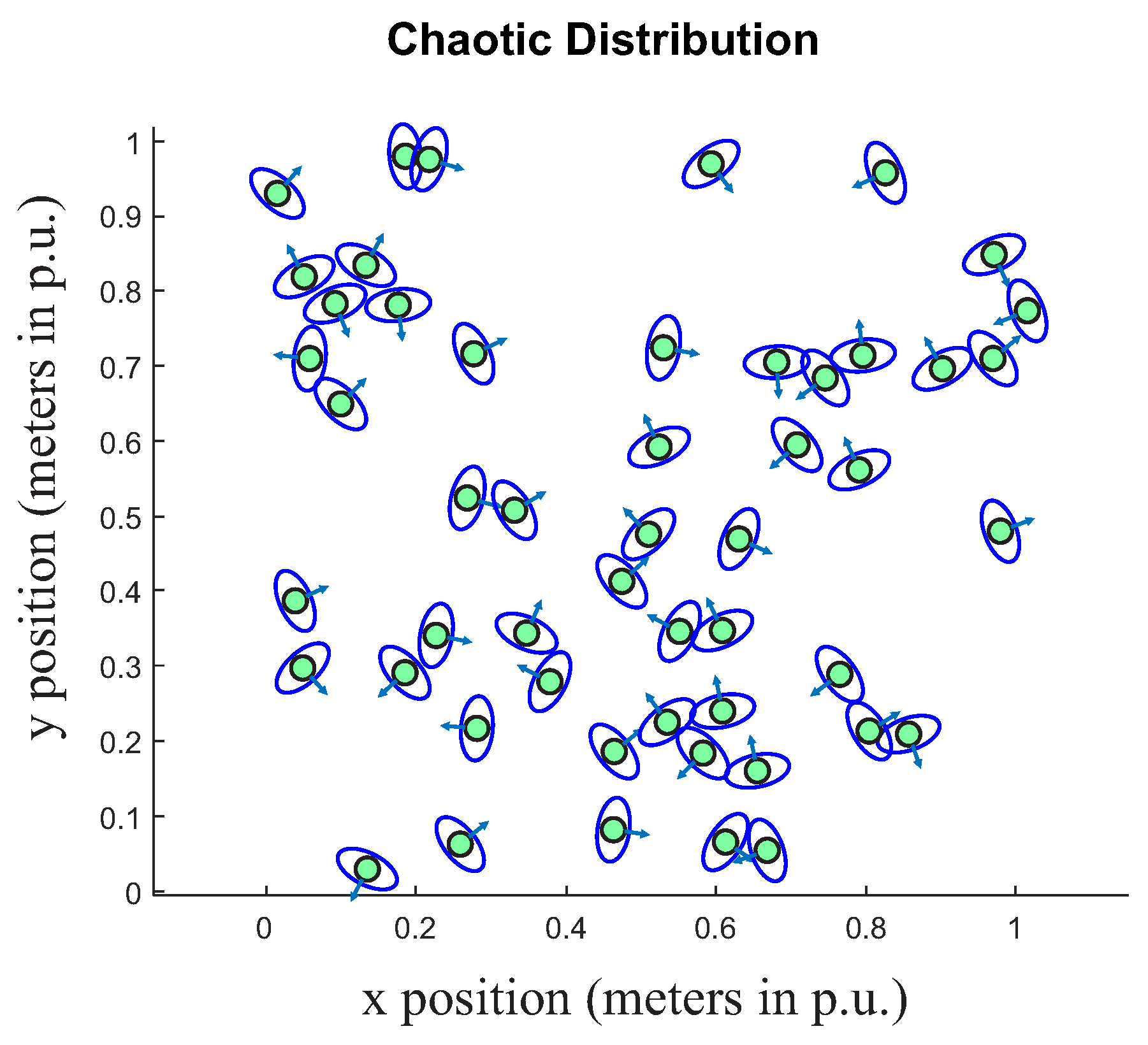
4.1. Groups Classification
4.2. Including Orientation
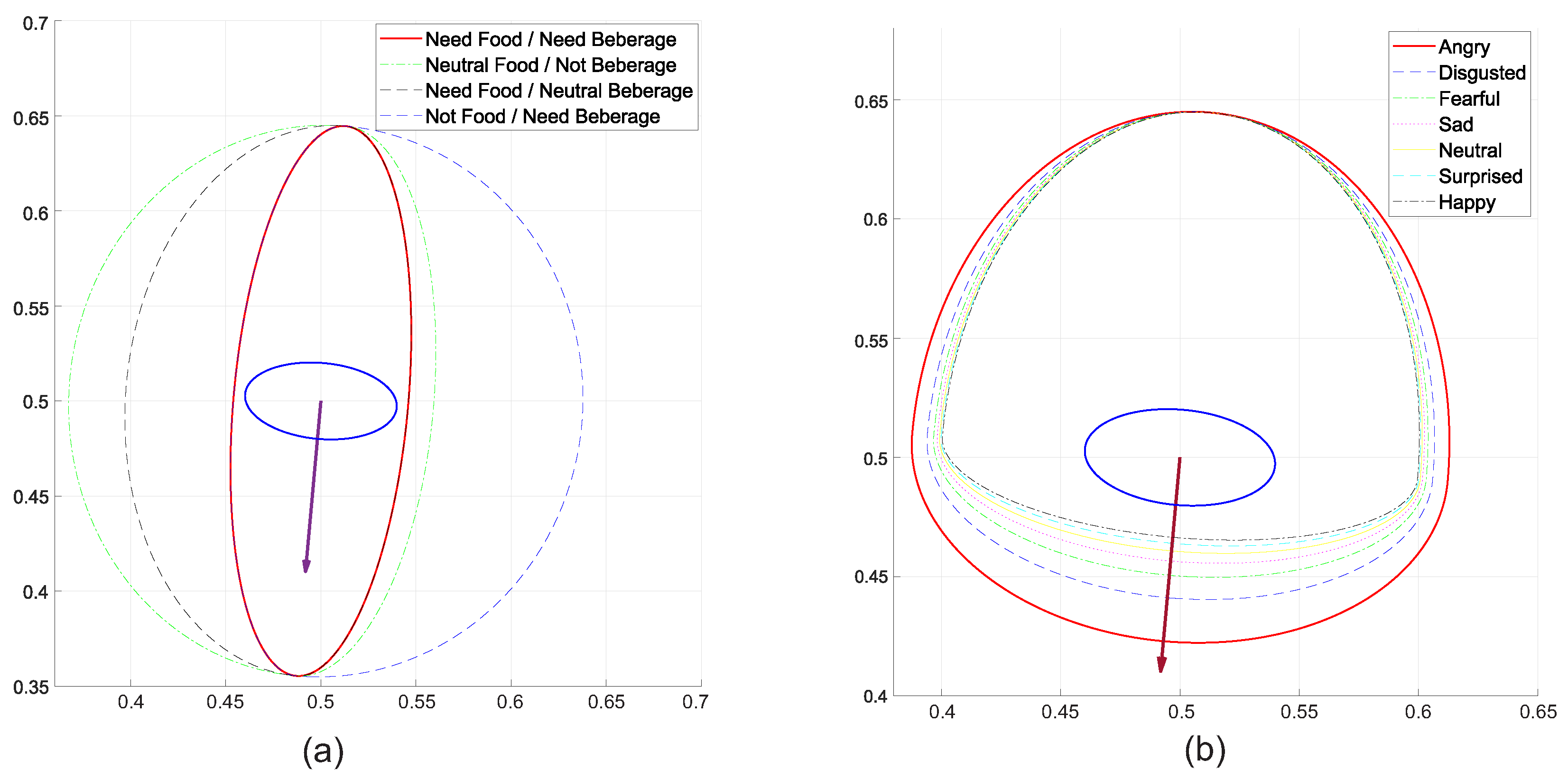
4.3. Modified Asymmetric Gaussian with Socialization Features
4.4. Asymmetric Gaussian in Groups of People
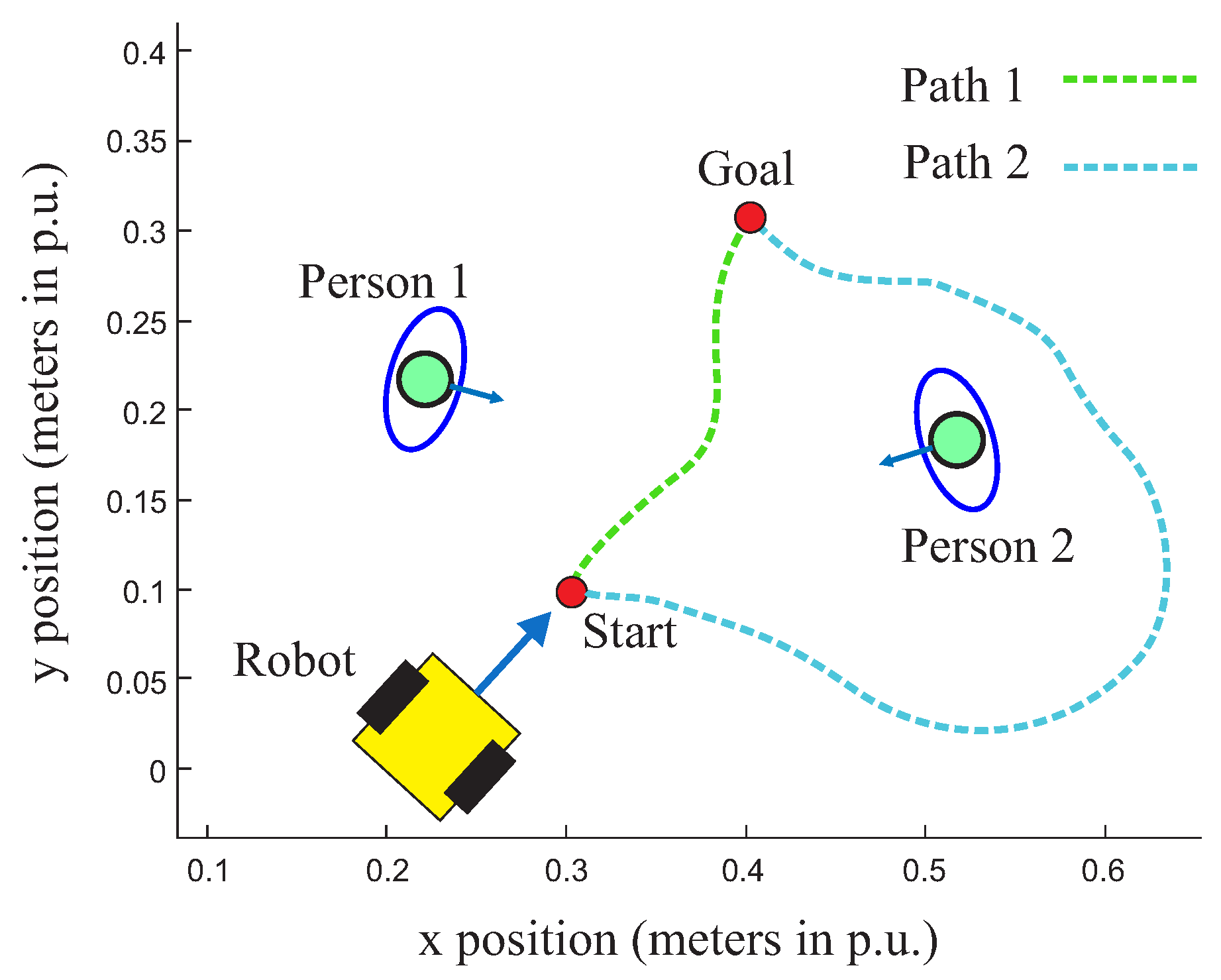
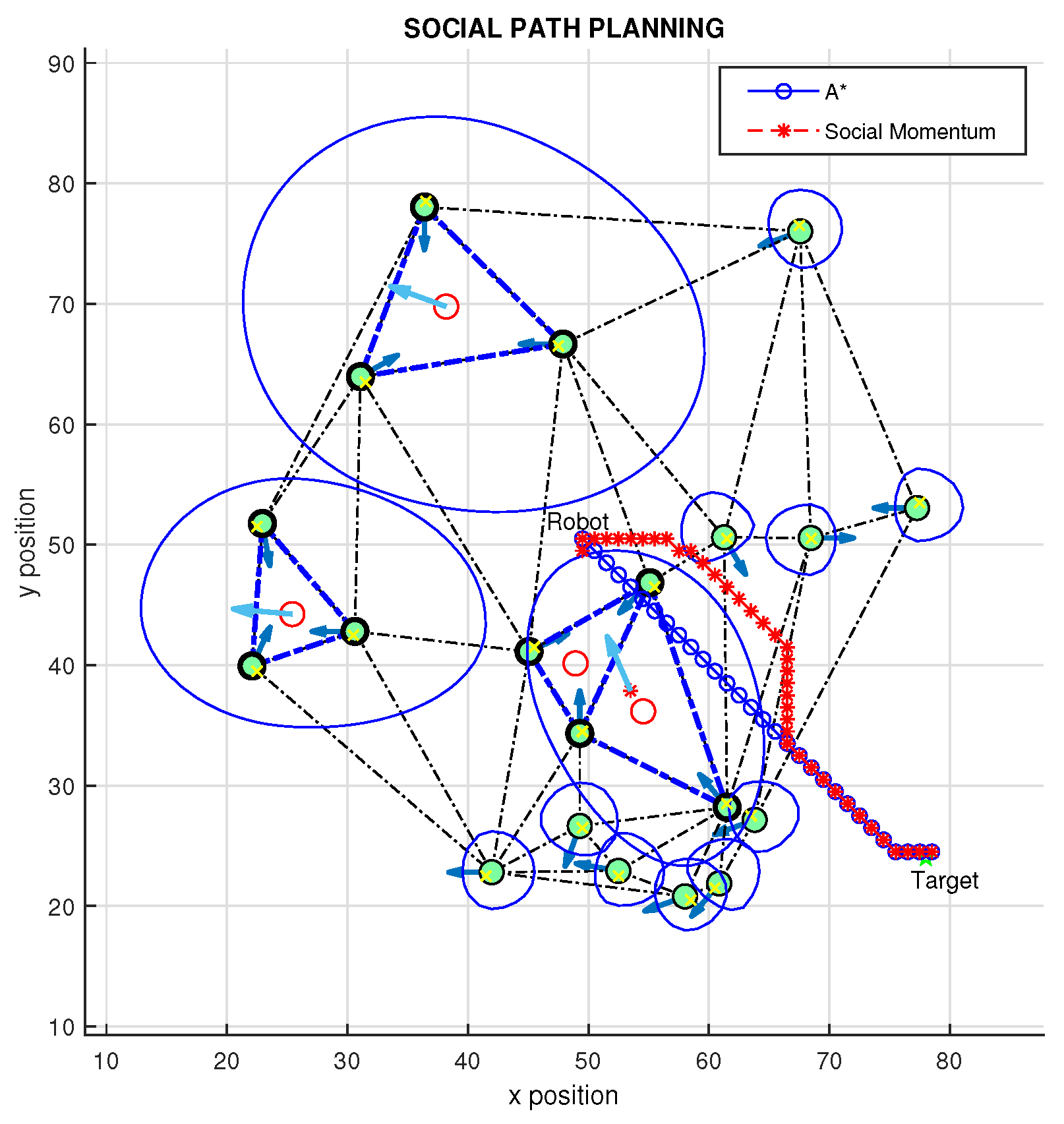
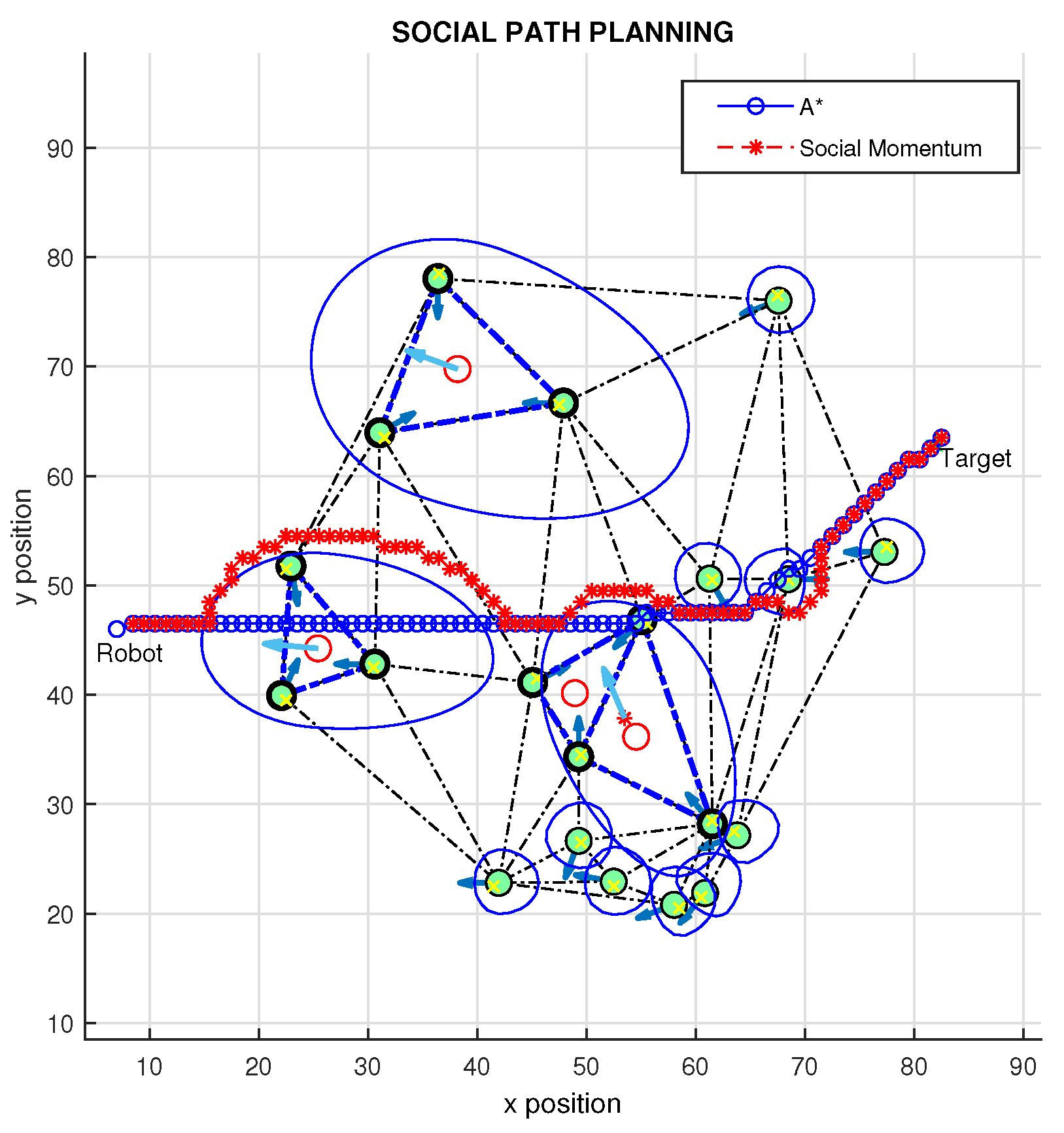
4.5. Path Planning and Navigation Using the Proposed Method
5. Discussion
5.1. Representation of Socialization Features in ROBOTS
5.2. Representation of Socialization Features in a Group of People
5.3. Benefits of Social Perceptions
5.4. Other Possible Applications for Group Gaussian
5.5. Accuracy of Weights/Influences of Socialization Features in Robots
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Gonzalez-Aguirre, J.A.; Osorio-Oliveros, R.; Rodríguez-Hernández, K.L.; Lizárraga-Iturralde, J.; Morales Menendez, R.; Ramírez-Mendoza, R.A.; Ramírez-Moreno, M.A.; Lozoya-Santos, J.D.J. Service Robots: Trends and Technology. Appl. Sci. 2021, 11, 10702. [Google Scholar] [CrossRef]
- Kocsis, M.; Zöllner, R.; Mogan, G. Interactive System for Package Delivery in Pedestrian Areas Using a Self-Developed Fleet of Autonomous Vehicles. Electronics 2022, 11, 748. [Google Scholar] [CrossRef]
- Garcia-Haro, J.M.; Oña, E.D.; Hernandez-Vicen, J.; Martinez, S.; Balaguer, C. Service Robots in Catering Applications: A Review and Future Challenges. Electronics 2021, 10, 47. [Google Scholar] [CrossRef]
- Fragapane, G.; de Koster, R.; Sgarbossa, F.; Strandhagen, J.O. Planning and control of autonomous mobile robots for intralogistics: Literature review and research agenda. Eur. J. Oper. Res. 2021, 294, 405–426. [Google Scholar] [CrossRef]
- Loukatos, D.; Petrongonas, E.; Manes, K.; Kyrtopoulos, I.V.; Dimou, V.; Arvanitis, K.G. A Synergy of Innovative Technologies towards Implementing an Autonomous DIY Electric Vehicle for Harvester-Assisting Purposes. Machines 2021, 9, 82. [Google Scholar] [CrossRef]
- Wirtz, J.; Patterson, P.; Kunz, W.; Gruber, T.; Lu, V.; Paluch, S.; Martins, A. Brave New World: Service Robots in the Frontline. J. Serv. Manag. 2018, 29, 907–931. [Google Scholar] [CrossRef] [Green Version]
- Duffy, B.R.; Rooney, C.; O’Hare, G.M.; O’Donoghue, R. What is a social robot? In Proceedings of the 10th Irish Conference on Artificial Intelligence & Cognitive Science, Cork, Ireland, 1–3 September 1999. [Google Scholar]
- International Federation of Robotics (IFR). Automation Strategies Drive 12% Increase in Number of Robots at Work Globally; International Federation of Robotics (IFR): Frankfurt, Germany, 2020. [Google Scholar]
- Abubakar, S.; Das, S.K.; Robinson, C.; Saadatzi, M.N.; Logsdon, M.C.; Mitchell, H.; Chlebowy, D.; Popa, D.O. ARNA, a Service robot for Nursing Assistance: System Overview and User Acceptability. In Proceedings of the 2020 IEEE 16th International Conference on Automation Science and Engineering (CASE), Hong Kong, China, 20–21 August 2020; pp. 1408–1414. [Google Scholar]
- Karar, A.; Said, S.; Beyrouthy, T. Pepper Humanoid Robot as a Service Robot: A Customer Approach. In Proceedings of the 2019 3rd International Conference on Bio-Engineering for Smart Technologies (BioSMART), Paris, France, 24–26 April 2019; pp. 1–4. [Google Scholar]
- Breazeal, C.L. Sociable Machines: Expressive Social Exchange. Ph.D. Thesis, Massachusetts Institute of Technology, Department of Electrical Engineering and Computer Science, Cambridge, MA, USA, 2000. [Google Scholar]
- Ewick, P.; Silbey, S.S. The Common Place of Law: Stories from Everyday Life; University of Chicago Press: Chicago, IL, USA, 1998. [Google Scholar]
- Cavallo, F.; Semeraro, F.; Fiorini, L.; Magyar, G.; Sinčák, P.; Dario, P. Emotion modelling for social robotics applications: A review. J. Bionic Eng. 2018, 15, 185–203. [Google Scholar] [CrossRef]
- Sauer, J.; Schmutz, S.; Sonderegger, A.; Messerli, N. Social stress and performance in human-machine interaction: A neglected research field. Ergonomics 2019, 62, 1377–1391. [Google Scholar] [CrossRef]
- Cavallo, F.; Limosani, R.; Manzi, A.; Bonaccorsi, M.; Esposito, R.; Di Rocco, M.; Pecora, F.; Teti, G.; Saffiotti, A.; Dario, P. Development of a socially believable multi-robot solution from town to home. Cogn. Comput. 2014, 6, 954–967. [Google Scholar] [CrossRef] [Green Version]
- Li, D.; Rau, P.P.; Li, Y. A cross-cultural study: Effect of robot appearance and task. Int. J. Soc. Robot. 2010, 2, 175–186. [Google Scholar] [CrossRef]
- Sehestedt, S.; Kodagoda, S.; Dissanayake, G. Robot path planning in a social context. In Proceedings of the IEEE International Conference on Robotics Automation and Mechatronics (RAM), Singapore, 28–30 June 2010. [Google Scholar]
- Garrell, A.; Sanfeliu, A. Cooperative social robots to accompany groups of people. Int. J. Robot. Res. 2012, 31, 1675–1701. [Google Scholar] [CrossRef] [Green Version]
- Gómez, J.V.; Mavridis, N.; Garrido, S. Social Path Planning: Generic Human-Robot Interaction Framework for Robotic Navigation Tasks. In Proceedings of the Cognitive Robotics Systems: Replicating Human Actions and Activities, Workshop of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS’13), Tokyo, Japan, 3 November 2013. [Google Scholar]
- Liu, P.; Glas, D.F.; Kanda, T.; Ishiguro, H. Data-driven HRI: Learning social behaviors by example from human–human interaction. IEEE Trans. Robot. 2016, 32, 988–1008. [Google Scholar] [CrossRef]
- Chen, W.; Zhang, T.; Zou, Y. Mobile robot path planning based on social interaction space in social environment. Int. J. Adv. Robot. Syst. 2018, 15, 1–10. [Google Scholar] [CrossRef] [Green Version]
- Daza, M.; Barrios-Aranibar, D.; Diaz-Amado, J.; Cardinale, Y.; Vilasboas, J. An Approach of Social Navigation Based on Proxemics for Crowded Environments of Humans and Robots. Micromachines 2021, 12, 193. [Google Scholar] [CrossRef]
- Vilasboas, J.P.; Sampaio, M.S.C.; Moreira, G.F.; Souza, A.B.; Diaz-Amado, J.; Barrios-Aranibar, D.; Cardinale, Y.; Soares, J.E. Application of social constraints for dynamic navigation considering semantic annotations on geo-referenced maps. In Proceedings of the IECON 2021—47th Annual Conference of the IEEE Industrial Electronics Society, Toronto, ON, Canada, 13–16 October 2021; pp. 1–7. [Google Scholar] [CrossRef]
- Glas, D.F.; Satake, S.; Ferreri, F.; Kanda, T.; Hagita, N.; Ishiguro, H. The network robot system: Enabling social human-robot interaction in public spaces. J. Hum. Robot. Interact. 2012, 1, 5–32. [Google Scholar] [CrossRef] [Green Version]
- Kanda, T.; Shiomi, M.; Miyashita, Z.; Ishiguro, H.; Hagita, N. An affective guide robot in a shopping mall. In Proceedings of the 4th ACM/IEEE International Conference on Human Robot Interaction, La Jolla, CA, USA, 9–13 March 2009; pp. 173–180. [Google Scholar]
- Tolunbüke, C.; Metin, T. Personal Space Calculation and Path Planning for Mobile Robots Based on the Turkish Social and Cultural Structure and the Gender. In Proceedings of the 2018 6th International Conference on Control Engineering & Information Technology (CEIT), Istanbul, Turkey, 25–27 November 2018; pp. 1–6. [Google Scholar]
- Zaraki, A.; Pieroni, M.; De Rossi, D.; Mazzei, D.; Garofalo, R.; Cominelli, L.; Dehkordi, M.B. Design and evaluation of a unique social perception system for human—Robot interaction. In IEEE Transactions on Cognitive and Developmental Systems; IEEE: New York, NY, USA, 2016; Volume 9, pp. 341–355. [Google Scholar]
- Vega-Magro, A.; Calderita, L.V.; Bustos, P.; Núñez, P. Human-aware Robot Navigation based on Time-dependent Social Interaction Spaces: A use case for assistive robotics. In Proceedings of the 2020 IEEE International Conference on Autonomous Robot Systems and Competitions (ICARSC), Ponta Delgada, Portugal, 15–17 April 2020; pp. 140–145. [Google Scholar]
- Pandey, A.K.; Alami, R. A framework towards a socially aware mobile robot motion in human-centered dynamic environment. In Proceedings of the 2010 IEEE/RSJ International Conference on Intelligent Robots and Systems, Taipei, Taiwan, 18–22 November 2010; pp. 5855–5860. [Google Scholar]
- Truong, X.T.; Ngo, T.D. Dynamic social zone based mobile robot navigation for human comfortable safety in social environments. Int. J. Soc. Robot. 2016, 8, 663–684. [Google Scholar] [CrossRef]
- Stentz, A. The focussed D^* Algorithm for Real-Time Replanning. In Proceedings of the Fourteenth International Joint Conference on Artificial Intelligence, IJCAI 95, Montreal, QC, Canada, 20–25 August 1995; Volume 95, pp. 1652–1659. [Google Scholar]
- Ferguson, D.; Stentz, A. Using interpolation to improve path planning: The Field D* algorithm. J. Field Robot. 2006, 23, 79–101. [Google Scholar] [CrossRef] [Green Version]
- Truong, X.T.; Ngo, T.D. “To approach humans?”: A unified framework for approaching pose prediction and socially aware robot navigation. IEEE Trans. Cogn. Dev. Syst. 2017, 10, 557–572. [Google Scholar] [CrossRef]
- Hart, P.E.; Nilsson, N.J.; Raphael, B. A formal basis for the heuristic determination of minimum cost paths. IEEE Trans. Syst. Sci. Cybern. 1968, 4, 100–107. [Google Scholar] [CrossRef]
- Cui, S.G.; Wang, H.; Yang, L. A simulation study of A-star algorithm for robot path planning. In Proceedings of the 16th International Conference on Mechatronics Technology, Sichuan, China, 5–8 August 2012; pp. 506–510. [Google Scholar]
- Truong, X.T.; Ngo, T.D. Toward socially aware robot navigation in dynamic and crowded environments: A proactive social motion model. IEEE Trans. Autom. Sci. Eng. 2017, 14, 1743–1760. [Google Scholar] [CrossRef]
- Patompak, P.; Jeong, S.; Nilkhamhang, I.; Chong, N.Y. Learning Proxemics for Personalized Human–Robot Social Interaction. Int. J. Soc. Robot. 2019, 12, 267–280. [Google Scholar] [CrossRef]
- Ginés, J.; Martín, F.; Vargas, D.; Rodríguez, F.J.; Matellán, V. Social navigation in a cognitive architecture using dynamic proxemic zones. Sensors 2019, 19, 5189. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Kendon, A. Spacing and orientation in co-present interaction. In Development of Multimodal Interfaces: Active Listening and Synchrony; Springer: Berlin/Heidelberg, Germany, 2010; pp. 1–15. [Google Scholar]
- Fong, T.; Nourbakhsh, I.; Dautenhahn, K. A survey of socially interactive robots. Robot. Auton. Syst. 2003, 42, 143–166. [Google Scholar] [CrossRef] [Green Version]
- Heerink, M.; Krose, B.; Evers, V.; Wielinga, B. Measuring acceptance of an assistive social robot: A suggested toolkit. In Proceedings of the RO-MAN 2009-The 18th IEEE International Symposium on Robot and Human Interactive Communication, Toyama, Japan, 27 September–2 November 2009; pp. 528–533. [Google Scholar]
- Naneva, S.; Sarda Gou, M.; Webb, T.L.; Prescott, T.J. A systematic review of attitudes, anxiety, acceptance, and trust towards social robots. Int. J. Soc. Robot. 2020, 12, 1179–1201. [Google Scholar] [CrossRef]
- Shin, D.H.; Choo, H. Modeling the acceptance of socially interactive robotics: Social presence in human–robot interaction. Interact. Stud. 2011, 12, 430–460. [Google Scholar] [CrossRef]
- Webb, N.; Ruiz-Garcia, A.; Elshaw, M.; Palade, V. Emotion Recognition from Face Images in an Unconstrained Environment for usage on Social Robots. In Proceedings of the 2020 International Joint Conference on Neural Networks (IJCNN), Glasgow, UK, 19–24 July 2020; pp. 1–8. [Google Scholar]
- Chen, L.; Su, W.; Feng, Y.; Wu, M.; She, J.; Hirota, K. Two-layer fuzzy multiple random forest for speech emotion recognition in human-robot interaction. Inf. Sci. 2020, 509, 150–163. [Google Scholar] [CrossRef]
- Rios-Martinez, J.; Spalanzani, A.; Laugier, C. From proxemics theory to socially-aware navigation: A survey. Int. J. Soc. Robot. 2015, 7, 137–153. [Google Scholar] [CrossRef]
- Kirby, R. Social Robot Navigation. Ph.D. Thesis, The Robotics Institute Carnegie Mellon University, Pittsburgh, PA, USA, 2010; p. 15213. [Google Scholar]
- Vega, A.; Cintas, R.; Manso, L.J.; Bustos, P.; Núñez, P. Socially-Accepted Path Planning for Robot Navigation Based on Social Interaction Spaces. In Proceedings of the Iberian Robotics Conference, Porto, Portugal, 20–22 November 2019; Springer: Berlin/Heidelberg, Germany, 2019; pp. 644–655. [Google Scholar]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Emotional State | Feature Value |
|---|---|
| Angry | 0.14 |
| Disgusted | 0.28 |
| Fearful | 0.42 |
| Sad | 0.56 |
| Neutral | 0.70 |
| Surprised | 0.84 |
| Happy | 0.98 |
| Food Need | Value | Beverage Need | Value |
|---|---|---|---|
| Not Need | 0.1 | Not Need | 0.1 |
| Neutral | 0.5 | Neutral | 0.5 |
| Need | 0.9 | Need | 0.9 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sousa, R.M.d.; Barrios-Aranibar, D.; Diaz-Amado, J.; Patiño-Escarcina, R.E.; Trindade, R.M.P. A New Approach for Including Social Conventions into Social Robots Navigation by Using Polygonal Triangulation and Group Asymmetric Gaussian Functions. Sensors 2022, 22, 4602. https://doi.org/10.3390/s22124602
Sousa RMd, Barrios-Aranibar D, Diaz-Amado J, Patiño-Escarcina RE, Trindade RMP. A New Approach for Including Social Conventions into Social Robots Navigation by Using Polygonal Triangulation and Group Asymmetric Gaussian Functions. Sensors. 2022; 22(12):4602. https://doi.org/10.3390/s22124602
Chicago/Turabian StyleSousa, Raphaell Maciel de, Dennis Barrios-Aranibar, Jose Diaz-Amado, Raquel E. Patiño-Escarcina, and Roque Mendes Prado Trindade. 2022. "A New Approach for Including Social Conventions into Social Robots Navigation by Using Polygonal Triangulation and Group Asymmetric Gaussian Functions" Sensors 22, no. 12: 4602. https://doi.org/10.3390/s22124602
APA StyleSousa, R. M. d., Barrios-Aranibar, D., Diaz-Amado, J., Patiño-Escarcina, R. E., & Trindade, R. M. P. (2022). A New Approach for Including Social Conventions into Social Robots Navigation by Using Polygonal Triangulation and Group Asymmetric Gaussian Functions. Sensors, 22(12), 4602. https://doi.org/10.3390/s22124602