
Interturn Short Fault Diagnosis Using Magnitude and Phase of Currents in Permanent Magnet Synchronous Machines

Abstract
:1. Introduction
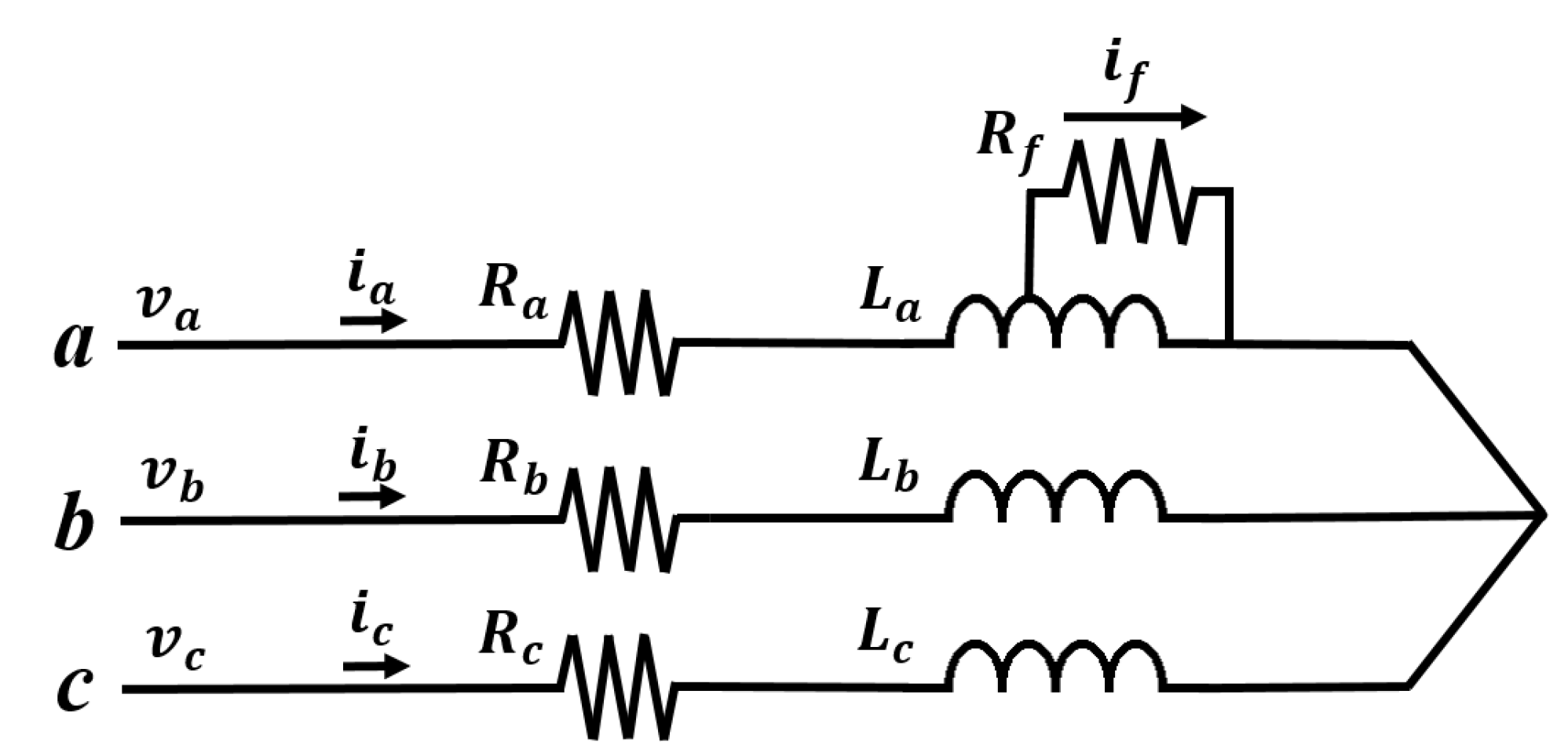
2. PMSM Dynamics with ITSFs
3. A Strategy for ITSF Diagnosis
3.1. Faulty Parts of the Three-Phase Currents
3.2. Analysis of PSC and NSC with ITSF
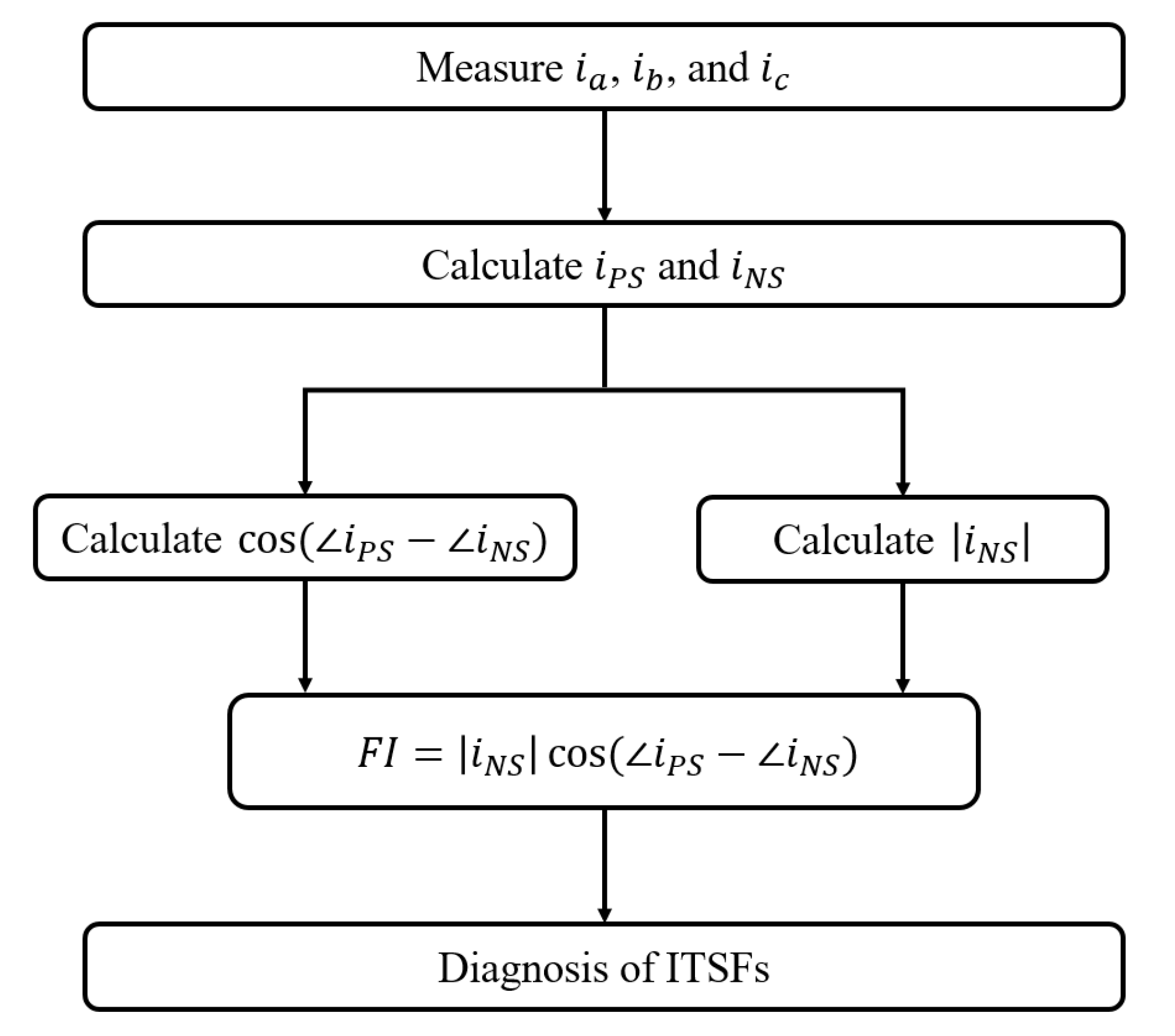
3.3. Proposed Fault Indicator
4. Experimental Setup and Data Collection
5. Experimental Results and Discussion
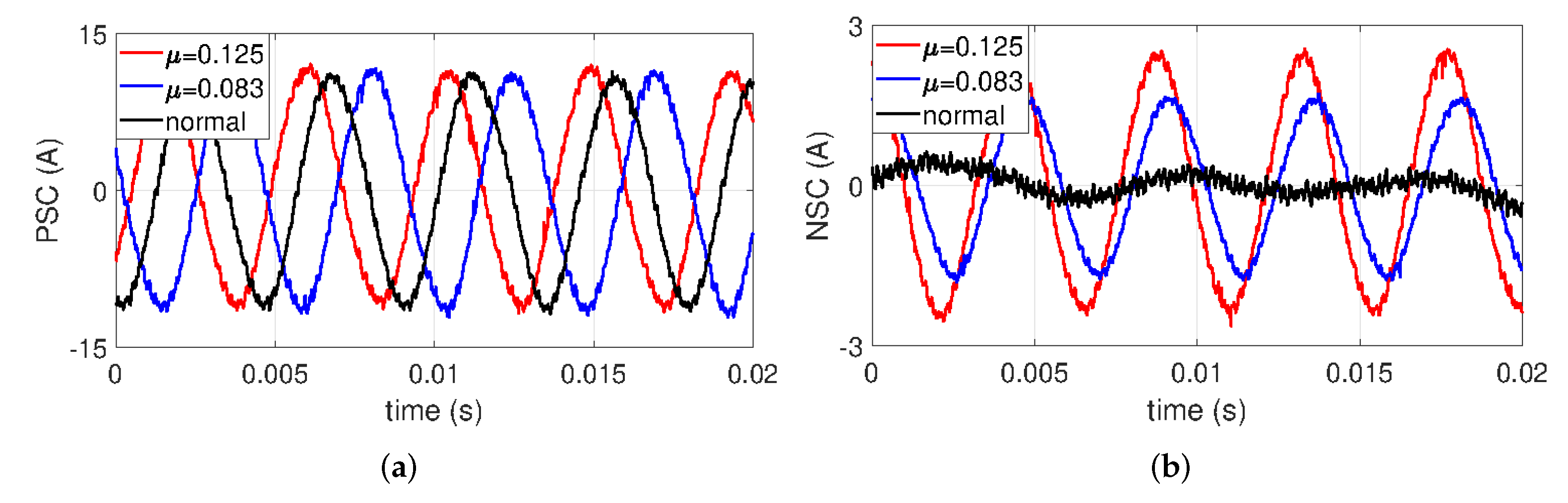
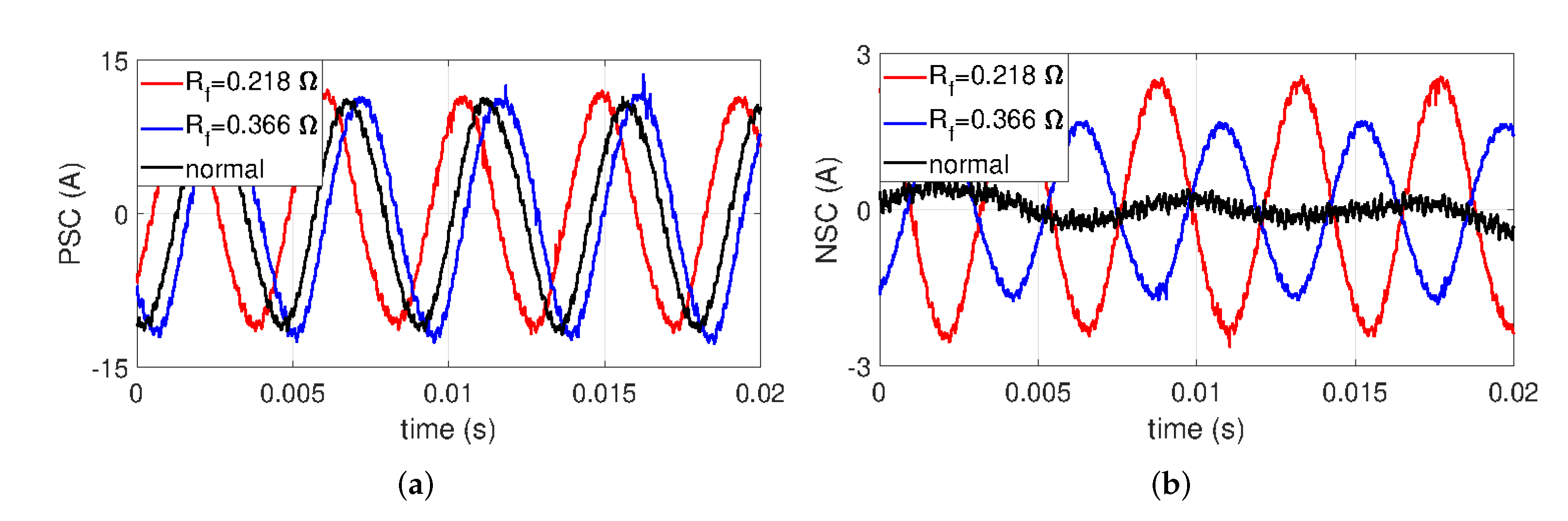
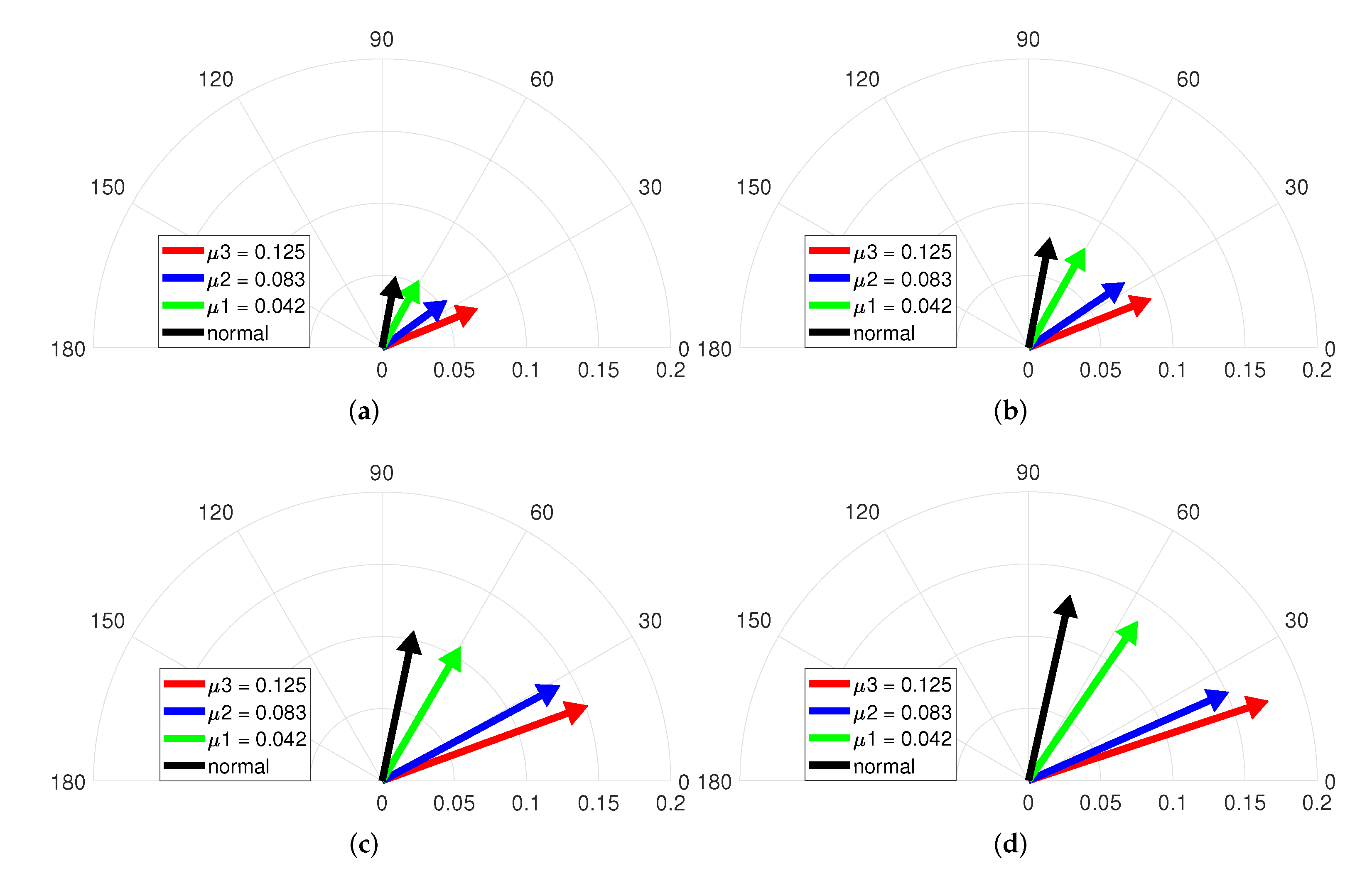
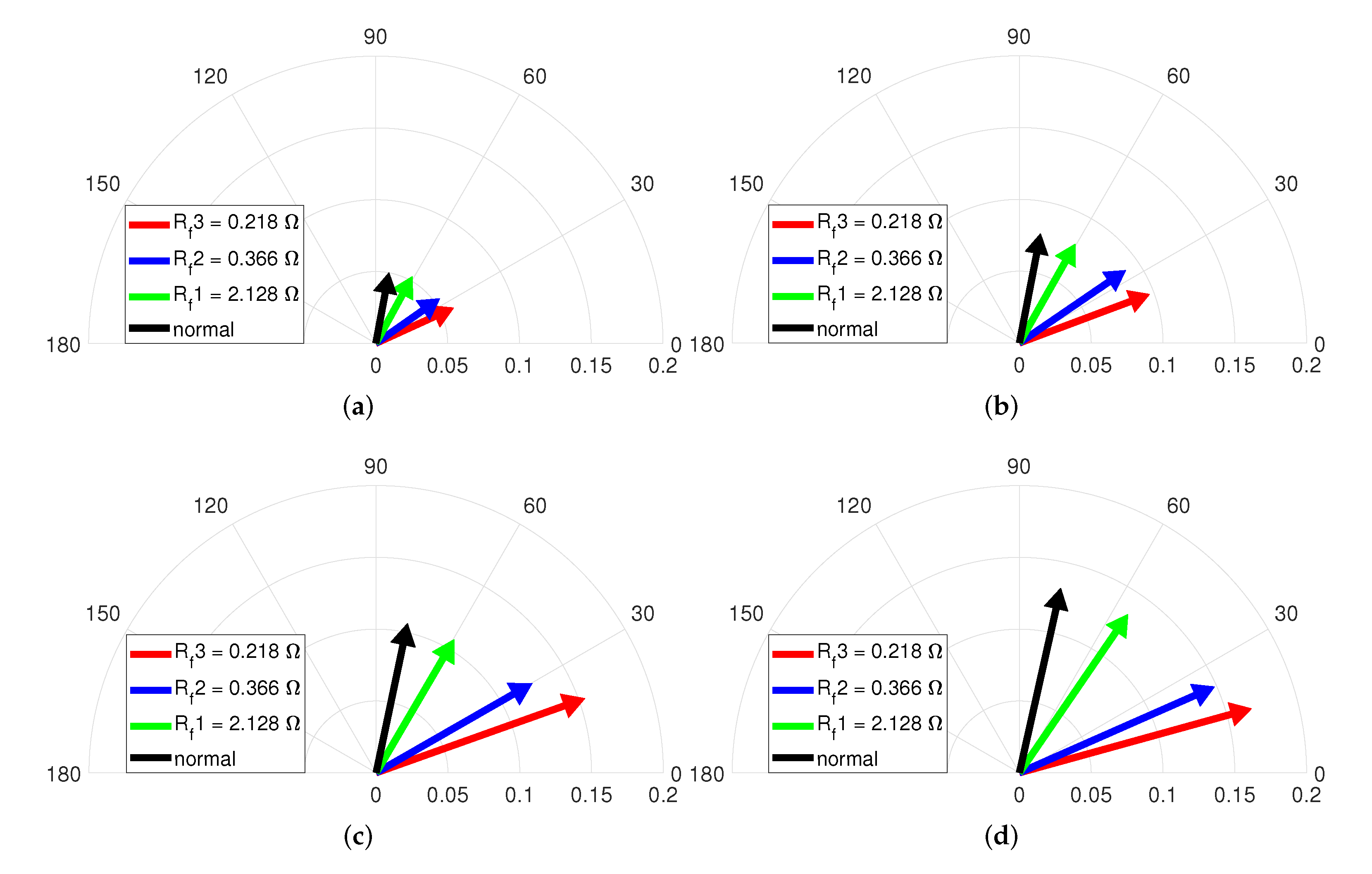
5.1. PSC and NSC
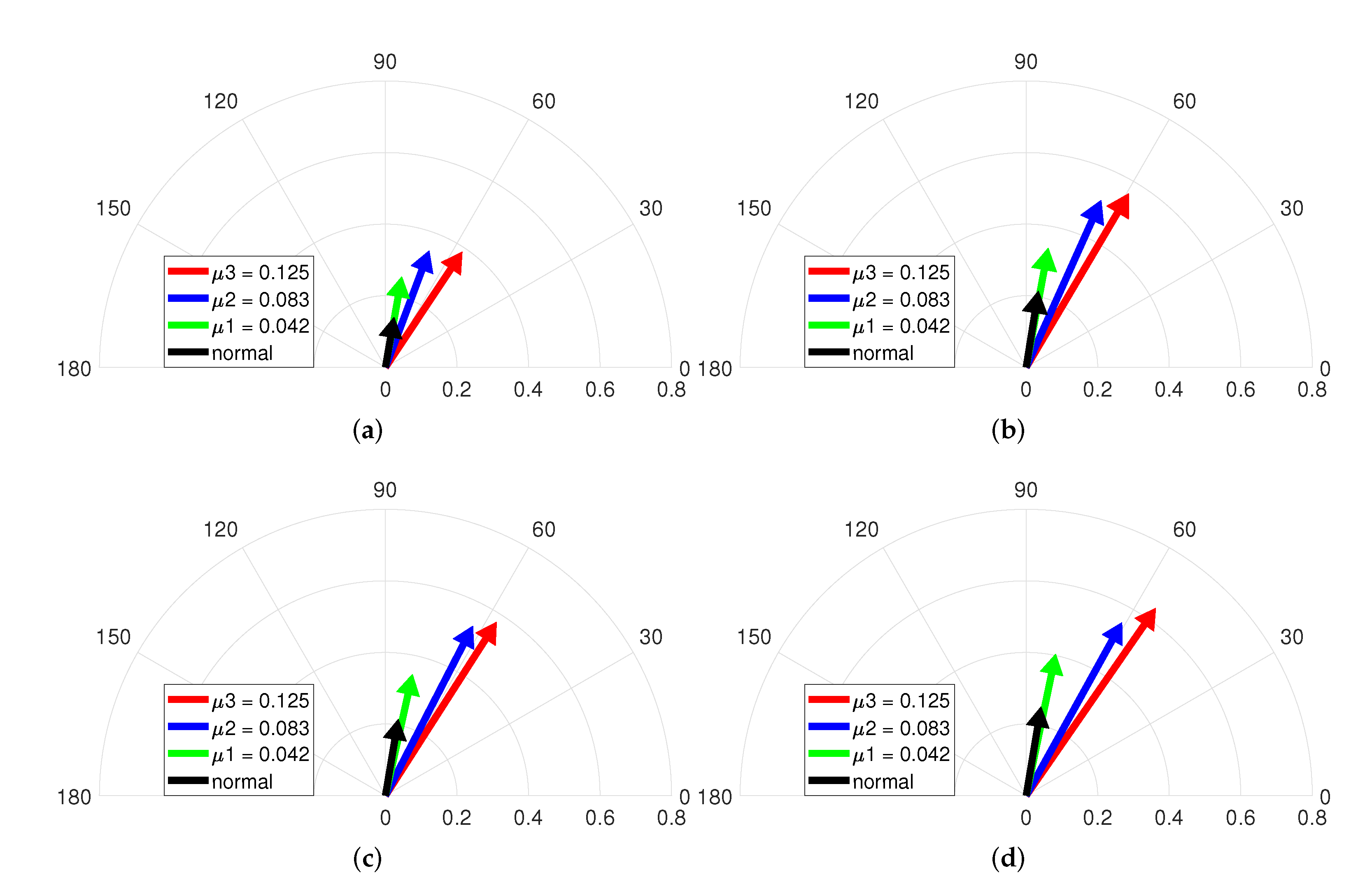
5.2. Vector Diagrams for Magnitude and Phase Indicators
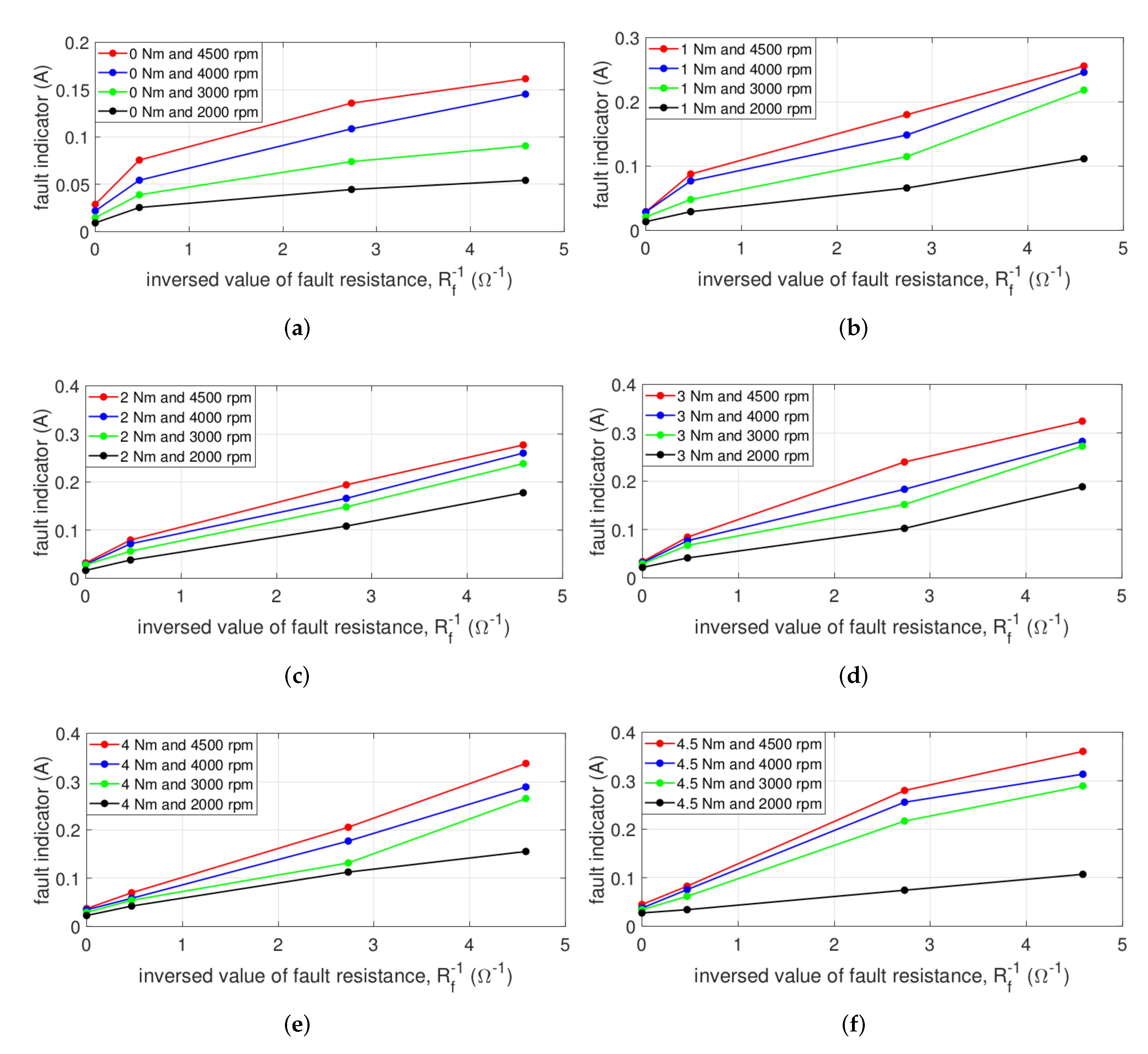
5.3. Fault Indicator under Various Conditions
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| PMSM | Permanent magnet synchronous machine |
| ITSF | Interturn short fault |
| PSC | Positive-sequence current |
| NSC | Negative-sequence current |
References
- Attestog, S.; Senanayaka, J.S.L.; Van Khang, H.; Robbersmyr, K.G. Mixed Fault Classification of Sensorless PMSM Drive in Dynamic Operations Based on External Stray Flux Sensors. Sensors 2022, 22, 1216. [Google Scholar] [CrossRef] [PubMed]
- Jankowska, K.; Dybkowski, M. Design and Analysis of Current Sensor Fault Detection Mechanisms for PMSM Drives Based on Neural Networks. Designs 2022, 6, 18. [Google Scholar] [CrossRef]
- Villani, M.; Tursini, M.; Fabri, G.; Castellini, L. High reliability permanent magnet brushless motor drive for aircraft application. IEEE Trans. Ind. Electron. 2011, 59, 2073–2081. [Google Scholar] [CrossRef]
- Jeong, I.; Hyon, B.J.; Nam, K. Dynamic modeling and control for SPMSMs with internal turn short fault. IEEE Trans. Power Electron. 2012, 28, 3495–3508. [Google Scholar] [CrossRef]
- Ebrahimi, B.M.; Faiz, J.; Roshtkhari, M.J. Static-, dynamic-, and mixed-eccentricity fault diagnoses in permanent-magnet synchronous motors. IEEE Trans. Ind. Electron. 2009, 56, 4727–4739. [Google Scholar] [CrossRef]
- Zhao, J.; Guan, X.; Li, C.; Mou, Q.; Chen, Z. Comprehensive evaluation of inter-turn short circuit faults in pmsm used for electric vehicles. IEEE Trans. Intell. Transp. Syst. 2020, 22, 611–621. [Google Scholar] [CrossRef]
- Allouche, A.; Etien, E.; Rambault, L.; Doget, T.; Cauet, S.; Sakout, A. Mechanical fault diagnostic in PMSM from only one current measurement: A tacholess order tracking approach. Sensors 2020, 20, 5011. [Google Scholar] [CrossRef]
- Grubic, S.; Aller, J.M.; Lu, B.; Habetler, T.G. A survey on testing and monitoring methods for stator insulation systems of low-voltage induction machines focusing on turn insulation problems. IEEE Trans. Ind. Electron. 2008, 55, 4127–4136. [Google Scholar] [CrossRef] [Green Version]
- Henao, H.; Capolino, G.A.; Fernandez-Cabanas, M.; Filippetti, F.; Bruzzese, C.; Strangas, E.; Pusca, R.; Estima, J.; Riera-Guasp, M.; Hedayati-Kia, S. Trends in fault diagnosis for electrical machines: A review of diagnostic techniques. IEEE Ind. Electron. Mag. 2014, 8, 31–42. [Google Scholar] [CrossRef]
- Rosero, J.A.; Romeral, L.; Ortega, J.A.; Rosero, E. Short-circuit detection by means of empirical mode decomposition and Wigner–Ville distribution for PMSM running under dynamic condition. IEEE Trans. Ind. Electron. 2009, 56, 4534–4547. [Google Scholar] [CrossRef]
- Cruz, S.M.; Cardoso, A.M. Stator winding fault diagnosis in three-phase synchronous and asynchronous motors, by the extended Park’s vector approach. IEEE Trans. Ind. Appl. 2001, 37, 1227–1233. [Google Scholar] [CrossRef]
- Kim, K.H. Simple online fault detecting scheme for short-circuited turn in a PMSM through current harmonic monitoring. IEEE Trans. Ind. Electron. 2010, 58, 2565–2568. [Google Scholar] [CrossRef]
- Jafari, A.; Faiz, J.; Jarrahi, M.A. A simple and efficient current-based method for interturn fault detection in bldc motors. IEEE Trans. Ind. Inform. 2020, 17, 2707–2715. [Google Scholar] [CrossRef]
- Moosavi, S.S.; Djerdir, A.; Ait-Amirat, Y.; Khaburi, D.A. ANN based fault diagnosis of permanent magnet synchronous motor under stator winding shorted turn. Electr. Power Syst. Res. 2015, 125, 67–82. [Google Scholar] [CrossRef]
- Kao, I.H.; Wang, W.J.; Lai, Y.H.; Perng, J.W. Analysis of permanent magnet synchronous motor fault diagnosis based on learning. IEEE Trans. Instrum. Meas. 2018, 68, 310–324. [Google Scholar] [CrossRef]
- Maraaba, L.S.; Milhem, A.S.; Nemer, I.A.; Al-Duwaish, H.; Abido, M.A. Convolutional neural network-based inter-turn fault diagnosis in LSPMSMs. IEEE Access 2020, 8, 81960–81970. [Google Scholar] [CrossRef]
- Lee, H.; Jeong, H.; Koo, G.; Ban, J.; Kim, S.W. Attention recurrent neural network-based severity estimation method for interturn short-circuit fault in permanent magnet synchronous machines. IEEE Trans. Ind. Electron. 2020, 68, 3445–3453. [Google Scholar] [CrossRef]
- Hang, J.; Zhang, J.; Cheng, M.; Huang, J. Online interturn fault diagnosis of permanent magnet synchronous machine using zero-sequence components. IEEE Trans. Power Electron. 2015, 30, 6731–6741. [Google Scholar] [CrossRef]
- Aubert, B.; Regnier, J.; Caux, S.; Alejo, D. Kalman-filter-based indicator for online interturn short circuits detection in permanent-magnet synchronous generators. IEEE Trans. Ind. Electron. 2014, 62, 1921–1930. [Google Scholar] [CrossRef]
- Mazzoletti, M.A.; Bossio, G.R.; De Angelo, C.H.; Espinoza-Trejo, D.R. A model-based strategy for interturn short-circuit fault diagnosis in PMSM. IEEE Trans. Ind. Electron. 2017, 64, 7218–7228. [Google Scholar] [CrossRef]
- Qi, Y.; Bostanci, E.; Zafarani, M.; Akin, B. Severity estimation of interturn short circuit fault for PMSM. IEEE Trans. Ind. Electron. 2018, 66, 7260–7269. [Google Scholar] [CrossRef]
- Du, B.; Wu, S.; Han, S.; Cui, S. Interturn fault diagnosis strategy for interior permanent-magnet synchronous motor of electric vehicles based on digital signal processor. IEEE Trans. Ind. Electron. 2015, 63, 1694–1706. [Google Scholar] [CrossRef]
- Zhang, Y.; Liu, G.; Zhao, W.; Zhou, H.; Chen, Q.; Wei, M. Online diagnosis of slight interturn short-circuit fault for a low-speed permanent magnet synchronous motor. IEEE Trans. Transp. Electrif. 2020, 7, 104–113. [Google Scholar] [CrossRef]
- Skowron, M.; Orlowska-Kowalska, T.; Kowalski, C.T. Detection of permanent magnet damage of PMSM drive based on direct analysis of the stator phase currents using convolutional neural network. IEEE Trans. Ind. Electron. 2022. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Values | Units |
|---|---|---|
| Rated output | 2.2 | kW |
| Rated speed | 4500 | rpm |
| Rated torque | 4.5 | Nm |
| Rated current | 10.2 | A |
| Input voltage | 220 | V |
| Number of pole pairs | 3 | - |
| Self inductance, | 2.42 | mH |
| Leakage inductance, | 0.67 | mH |
| Stator resistance, | 0.42 |
| 0.042 | 0.083 | 0.125 |
| 2.138 | 0.366 | 0.218 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Jeong, H.; Lee, H.; Kim, S.; Kim, S.W. Interturn Short Fault Diagnosis Using Magnitude and Phase of Currents in Permanent Magnet Synchronous Machines. Sensors 2022, 22, 4597. https://doi.org/10.3390/s22124597
Jeong H, Lee H, Kim S, Kim SW. Interturn Short Fault Diagnosis Using Magnitude and Phase of Currents in Permanent Magnet Synchronous Machines. Sensors. 2022; 22(12):4597. https://doi.org/10.3390/s22124597
Chicago/Turabian StyleJeong, Hyeyun, Hojin Lee, Seongyun Kim, and Sang Woo Kim. 2022. "Interturn Short Fault Diagnosis Using Magnitude and Phase of Currents in Permanent Magnet Synchronous Machines" Sensors 22, no. 12: 4597. https://doi.org/10.3390/s22124597
APA StyleJeong, H., Lee, H., Kim, S., & Kim, S. W. (2022). Interturn Short Fault Diagnosis Using Magnitude and Phase of Currents in Permanent Magnet Synchronous Machines. Sensors, 22(12), 4597. https://doi.org/10.3390/s22124597