
Automatic Rate and Rate-Integrating Mode-Switchable Axisymmetric Gyroscope


Abstract
:1. Introduction
2. Theory
2.1. Dynamic Equation
2.2. Control Algorithm
2.3. Angular Rate Output in RIG Mode
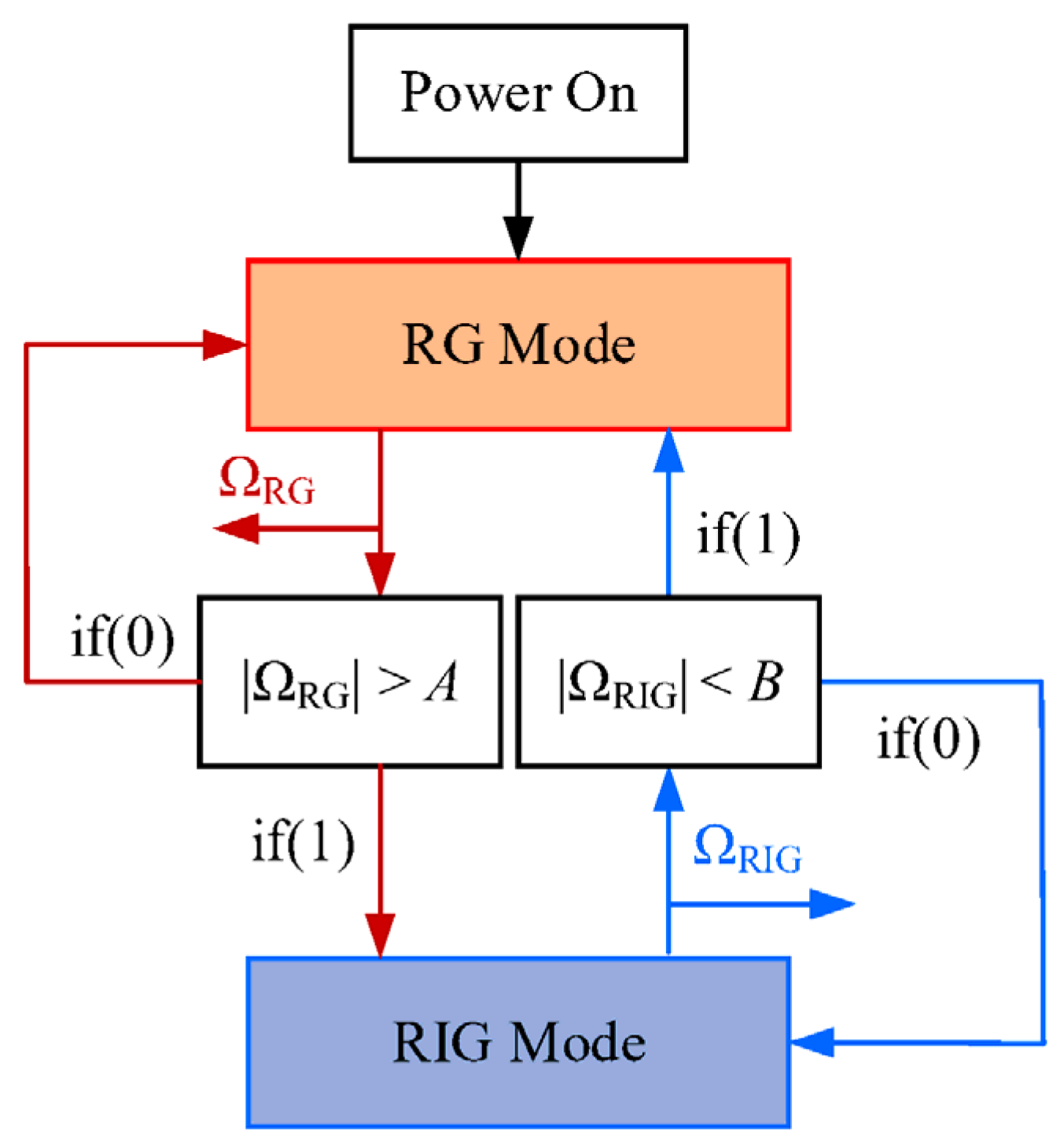
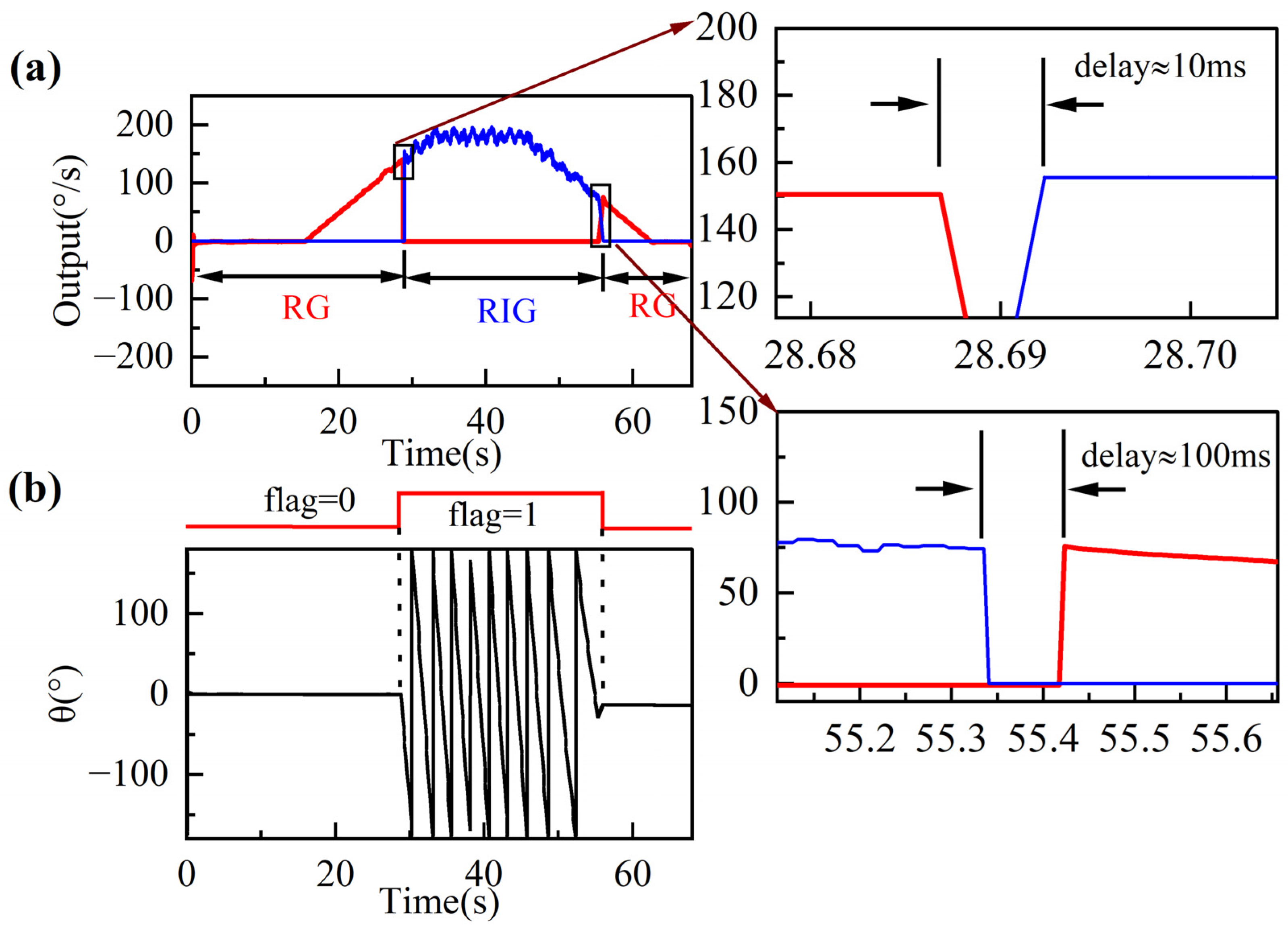
2.4. Switching Control
3. Experimental Results and Discussion
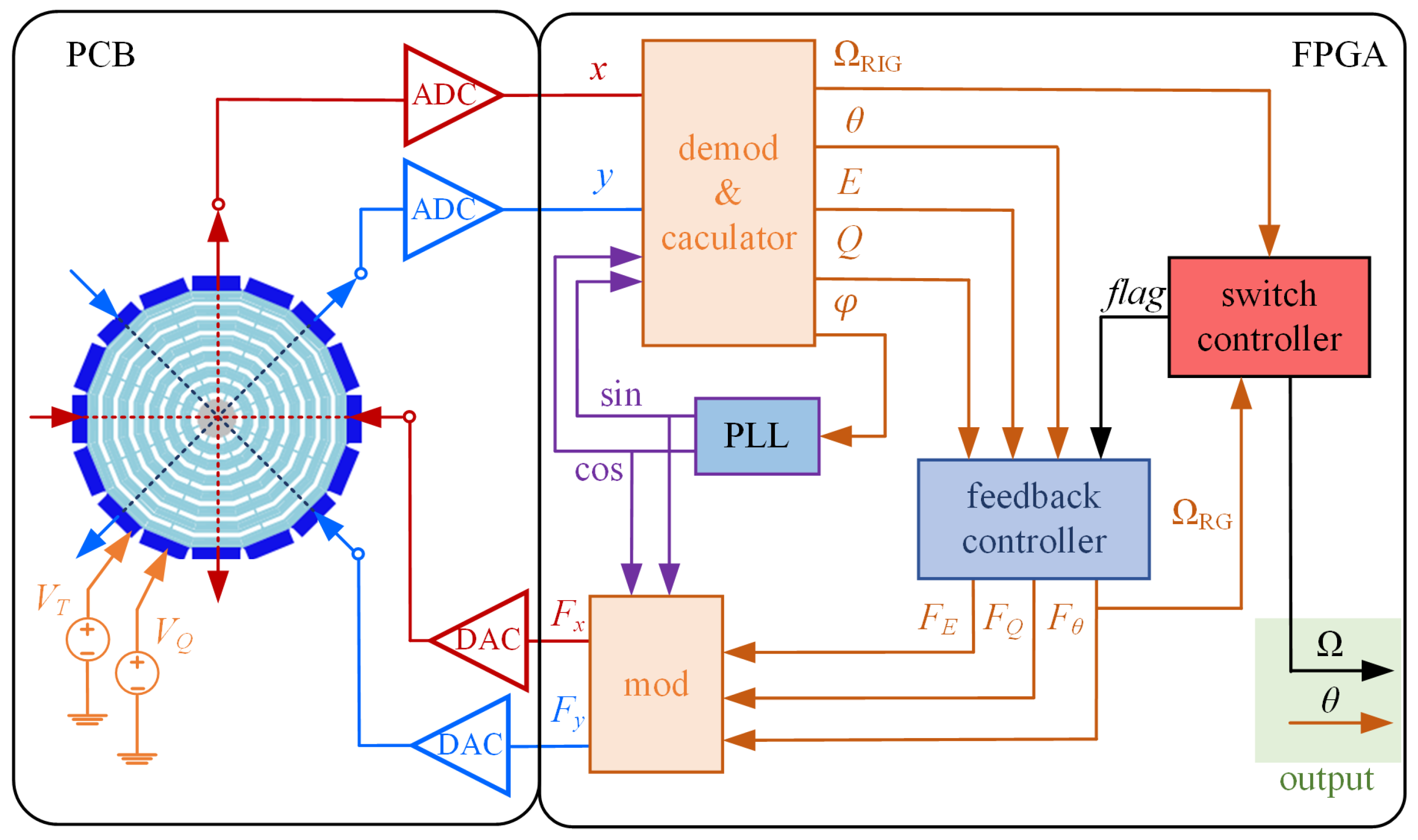
3.1. Device and Test Platform
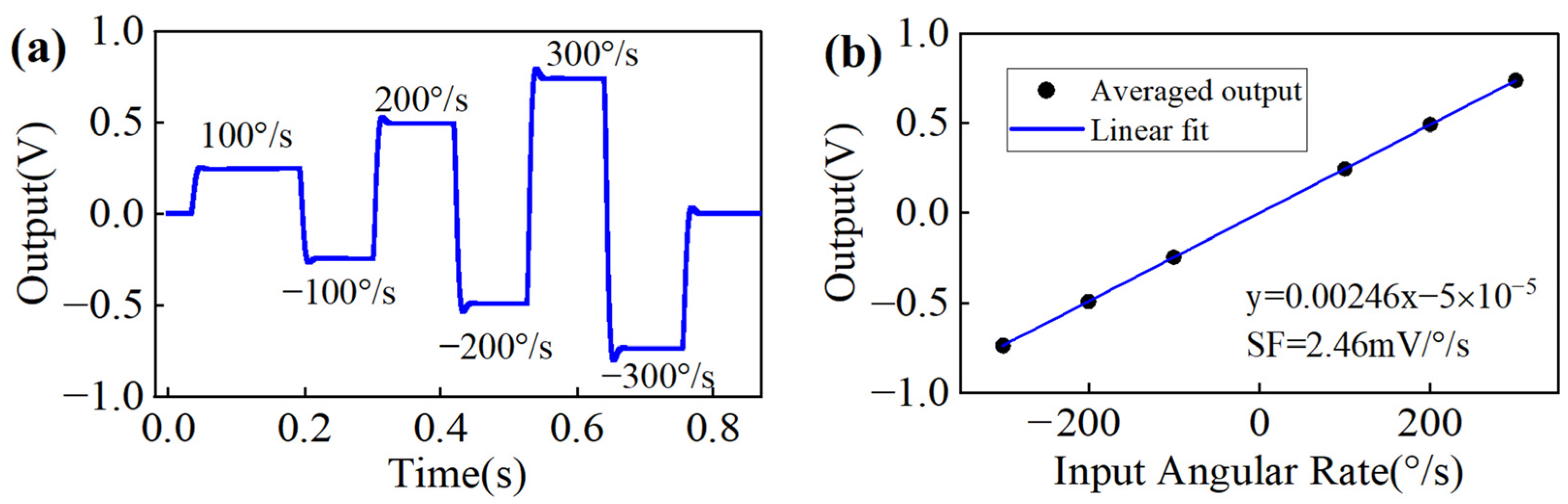
3.2. Scale Factor
3.3. Zero-Rate Output Performance in RG Mode
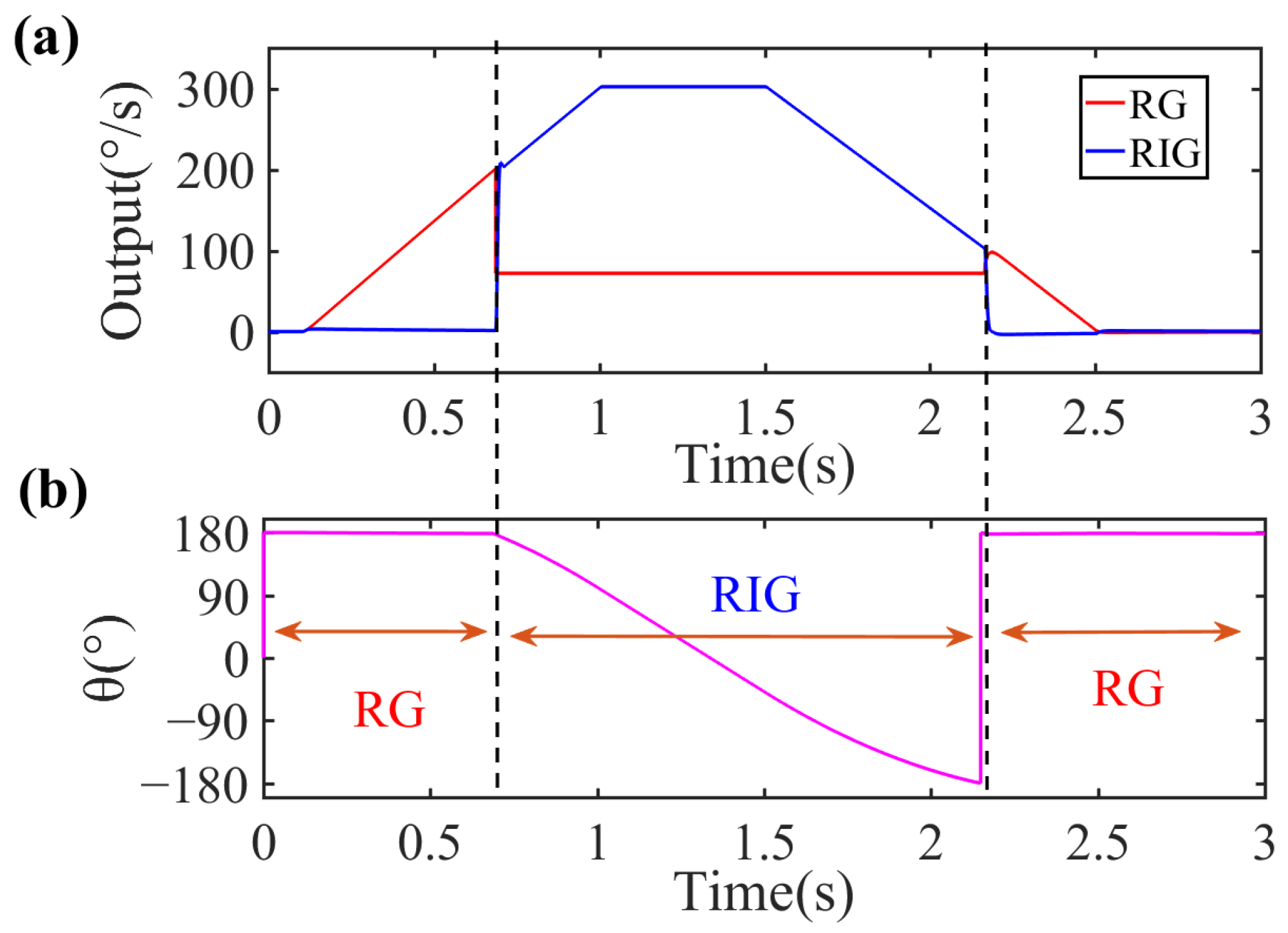
3.4. Mode Switching
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Shkel, A.M. Type I and Type II Micromachined Vibratory Gyroscopes. In Proceedings of the 2006 IEEE/ION Position, Location, and Navigation Symposium, PLANS 2006, San Diego, CA, USA, 25–27 April 2006; pp. 586–593. [Google Scholar] [CrossRef]
- Trusov, A.A.; Prikhodko, I.P.; Zotov, S.A.; Schofield, A.R.; Shkel, A.M. Ultra-high Q silicon gyroscopes with interchangeable rate and whole angle modes of operation. In Proceedings of the SENSORS, 2010 IEEE, Kona, HI, USA, 1–4 November 2010; pp. 864–867. [Google Scholar] [CrossRef]
- Taheri-Tehrani, P.; Izyumin, O.; Izyumin, I.; Ahn, C.H.; Horsley, D.A. Disk Resonator Gyroscope with Whole-Angle Mode Operation. In Proceedings of the IEEE International Symposium on Inertial Sensors and Systems, ISISS 2015, Hapuna Beach, HI, USA, 23–36 March 2015; pp. 1–4. [Google Scholar] [CrossRef]
- Cho, J.; Gregory, J.A.; Najafi, K. High-Q, 3kHz single-crystal-silicon cylindrical rate-integrating gyro (CING). In Proceedings of the 2012 25th IEEE International Conference on Micro Electro Mechanical Systems, MEMS 2012, Paris, France, 29 January–2 February 2012; pp. 172–175. [Google Scholar] [CrossRef]
- Senkal, D.; Ng, E.J.; Hong, V.; Yang, Y.; Ahn, C.H.; Kenny, T.W.; Shkel, A.M. Parametric drive of a toroidal MEMS rate integrating gyroscope demonstrating 20 PPM scale factor stability. In Proceedings of the 2015 28th IEEE International Conference on Micro Electro Mechanical Systems, MEMS 2015, Estoril, Portugal, 18–22 January 2015; pp. 29–32. [Google Scholar] [CrossRef]
- Askari, S.; Asadian, M.H.; Shkel, A.M. High quality factor MEMS gyroscope with whole angle mode of operation. In Proceedings of the IEEE International Symposium on Inertial Sensors and Systems, INERTIAL 2018, Lake Como, Italy, 26–29 March 2018; pp. 1–4. [Google Scholar] [CrossRef]
- Jong-Kwan, W.; Jae, Y.C.; Boyd, C.; Najafi, K. Whole-angle-mode micromachined fused-silica birdbath resonator gyroscope (WA-BRG). In Proceedings of the 2014 27th IEEE International Conference on Micro Electro Mechanical Systems, MEMS 2014, San Francisco, CA, USA, 26–30 January 2014. [Google Scholar] [CrossRef]
- Painter, C.C.; Shkel, A.M. Active structural error suppression in MEMS vibratory rate integrating gyroscopes. IEEE Sens. J. 2003, 3, 595–606. [Google Scholar] [CrossRef] [Green Version]
- Yazdi, N.; Ayazi, F.; Najafi, K. Micromachined inertial sensors. Proc. IEEE 1998, 86, 1640–1659. [Google Scholar] [CrossRef] [Green Version]
- Painter, C.C.; Shkel, A.M. Structural and thermal modeling of a z-axis rate integrating gyroscope. J. Micromech. Microeng. 2003, 13, 229. [Google Scholar] [CrossRef] [Green Version]
- Prikhodko, I.P.; Gregory, J.A.; Bugrov, D.I.; Judy, M.W. Overcoming Limitations for Rate Integrating Gyroscopes by Virtual Rotation. In Proceedings of the IEEE International Symposium on Inertial Sensors and Systems, ISISS 2016, Laguna Beach, CA, USA, 22–25 February 2016. [Google Scholar] [CrossRef]
- Prikhodko, I.P.; Gregory, J.A.; Judy, M.W. Virtually rotated MEMS gyroscope with angle output. In Proceedings of the 2017 30th IEEE International Conference on Micro Electro Mechanical Systems, MEMS 2017, Las Vegas, NV, USA, 22–26 January 2017. [Google Scholar] [CrossRef]
- Vercier, N.; Chaumet, B.; Leverrier, B.; Bouyat, S. A New Silicon Axisymmetric Gyroscope for Aerospace Applications. In Proceedings of the DGON Inertial Sensors and Systems, ISS 2020, Braunschweig, Germany, 15–16 September 2020. [Google Scholar] [CrossRef]
- Xu, Y.; Li, Q.; Wang, P.; Zhang, Y.; Zhou, X.; Yu, L.; Wu, X.; Xiao, D. 0.015 Degree-Per-Hour Honeycomb Disk Resonator Gyroscope. IEEE Sens. J. 2021, 21, 7326–7338. [Google Scholar] [CrossRef]
- Cho, J.Y.; Woo, J.-K.; Yan, J.; Peterson, R.L.; Najafi, K. Fused-silica micro birdbath resonator gyroscope (μ-BRG). J. Microelectromech. Syst. 2014, 23, 66–77. [Google Scholar] [CrossRef]
- Gregory, J.A.; Cho, J.; Najafi, K. Novel mismatch compensation methods for rate-integrating gyroscopes. In Proceedings of the 2012 IEEE/ION Position, Location and Navigation Symposium, PLANS 2012, Myrtle Beach, SC, USA, 23–26 April 2012. [Google Scholar] [CrossRef]
- Tsukamoto, T.; Tanaka, S. Virtually rotated MEMS whole angle gyroscope using independently controlled CW/CCW oscillations. In Proceedings of the IEEE International Symposium on Inertial Sensors and Systems, INERTIAL 2018, Lake Como, Italy, 26–29 March 2018. [Google Scholar] [CrossRef]
- Taheri-Tehrani, P.; Challoner, A.D.; Horsley, D.A. Micromechanical Rate Integrating Gyroscope With Angle-Dependent Bias Compensation Using a Self-Precession Method. IEEE Sens. J. 2018, 18, 3533–3543. [Google Scholar] [CrossRef]
- Liu, J.; Yang, Y.; Guo, S.; Fan, B.; Xuan, L.; Bu, F.; Xu, D. A Novel Compensation Method for Eliminating Precession Angular-Rate Bias in MEMS Rate-Integrating Gyroscopes. IEEE Access 2020, 8, 145611–145619. [Google Scholar] [CrossRef]
- Gregory, J.A.; Cho, J.; Najafi, K. MEMS rate and rate-integrating gyroscope control with commercial software defined radio hardware. In Proceedings of the 16th International Solid-State Sensors, Actuators and Microsystems Conference, Beijing, China, 5–9 June 2011. [Google Scholar] [CrossRef]
- Trusov, A.A.; Atikyan, G.; Rozelle, D.M.; Meyer, A.D.; Zotov, S.A.; Simon, B.R.; Shkel, A.M. Flat is not dead: Current and future performance of Si-MEMS Quad Mass Gyro (QMG) system. In Proceedings of the IEEE/ION Position, Location and Navigation Symposium, PLANS 2014, Monterey, CA, USA, 5–8 May 2014. [Google Scholar] [CrossRef]
- Challoner, A.D.; Ge, H.H.; Liu, J.Y. Boeing Disc Resonator Gyroscope. In Proceedings of the IEEE/ION Position, Location and Navigation Symposium, PLANS 2014, Monterey, CA, USA, 5–8 May 2014. [Google Scholar] [CrossRef]
- Lynch, D.D. CVGs utilizing non-axisymmetric structures operating in whole-angle mode. In Proceedings of the International Symposium on Inertial Sensors and Systems, ISISS 2014, Laguna Beach, CA, USA, 25–26 February 2014. [Google Scholar] [CrossRef]
- Friedland, B.; Hutton, M. Theory and error analysis of vibrating-member gyroscope. IEEE Trans. Autom. Control 1978, 23, 545–556. [Google Scholar] [CrossRef]
- Lynch, D.D. Vibratory Gyro Analysis by the Method of Averaging. In Proceedings of the 2nd Saint Petersburg International Conference on Gyroscopic Technology and Navigation, St. Petersburg, Russia, 26–34 May 1995. [Google Scholar]
- Jeanroy, A.; Bouvet, A.; Remillieux, G. HRG and Marine applications. Gyroscopy Navig. 2014, 5, 67–74. [Google Scholar] [CrossRef]
- Ragot, V.; Remillieux, G. A new control mode greatly improving performance of axisymmetrical vibrating gyroscopes. Gyroscopy Navig. 2011, 2, 229–238. [Google Scholar] [CrossRef]
- Fan, B.; Guo, S.; Yu, L.; Cheng, M.; Zhou, M.; Hu, W.; Zheng, F.; Xu, D. A Novel Sixteen-Sided Cobweb-Like Disk Resonator Gyroscope with Low As-Fabricated Frequency Split between Drive and Sense Modes. In Proceedings of the 2018 IEEE SENSORS, New Delhi, India, 28–31 October 2018. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Value | Units |
|---|---|---|
| fc 1 | 5045 | Hz |
| k | 1 | \ |
| Δf | 0 | Hz |
| Δ(1/τ) | 0 | rad |
| √E | 0.2 | μm |
| θω | 0 | ° |
| θτ | 0 | ° |
| Parameters | Value | Units |
|---|---|---|
| fc | 5045.93 | Hz |
| Δf | 1.66 | Hz |
| Qx | 136,252 | \ |
| Qy | 135,606 | \ |
| Δ(1/τ) | 5.35 × 10−4 | rad |
| k | 0.77 | \ |
| M | 4.5 × 10−7 | kg |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xuan, L.; Lu, M.; Liu, J.; Guo, S.; Xu, D. Automatic Rate and Rate-Integrating Mode-Switchable Axisymmetric Gyroscope. Sensors 2022, 22, 4334. https://doi.org/10.3390/s22124334
Xuan L, Lu M, Liu J, Guo S, Xu D. Automatic Rate and Rate-Integrating Mode-Switchable Axisymmetric Gyroscope. Sensors. 2022; 22(12):4334. https://doi.org/10.3390/s22124334
Chicago/Turabian StyleXuan, Lin, Mingyang Lu, Jing Liu, Shuwen Guo, and Dacheng Xu. 2022. "Automatic Rate and Rate-Integrating Mode-Switchable Axisymmetric Gyroscope" Sensors 22, no. 12: 4334. https://doi.org/10.3390/s22124334
APA StyleXuan, L., Lu, M., Liu, J., Guo, S., & Xu, D. (2022). Automatic Rate and Rate-Integrating Mode-Switchable Axisymmetric Gyroscope. Sensors, 22(12), 4334. https://doi.org/10.3390/s22124334