
A Displacement Sensing Method Based on Permanent Magnet and Magnetic Flux Measurement

 and
and 
Abstract
:1. Introduction
2. Sensing Principles
2.1. PM-MFM Method
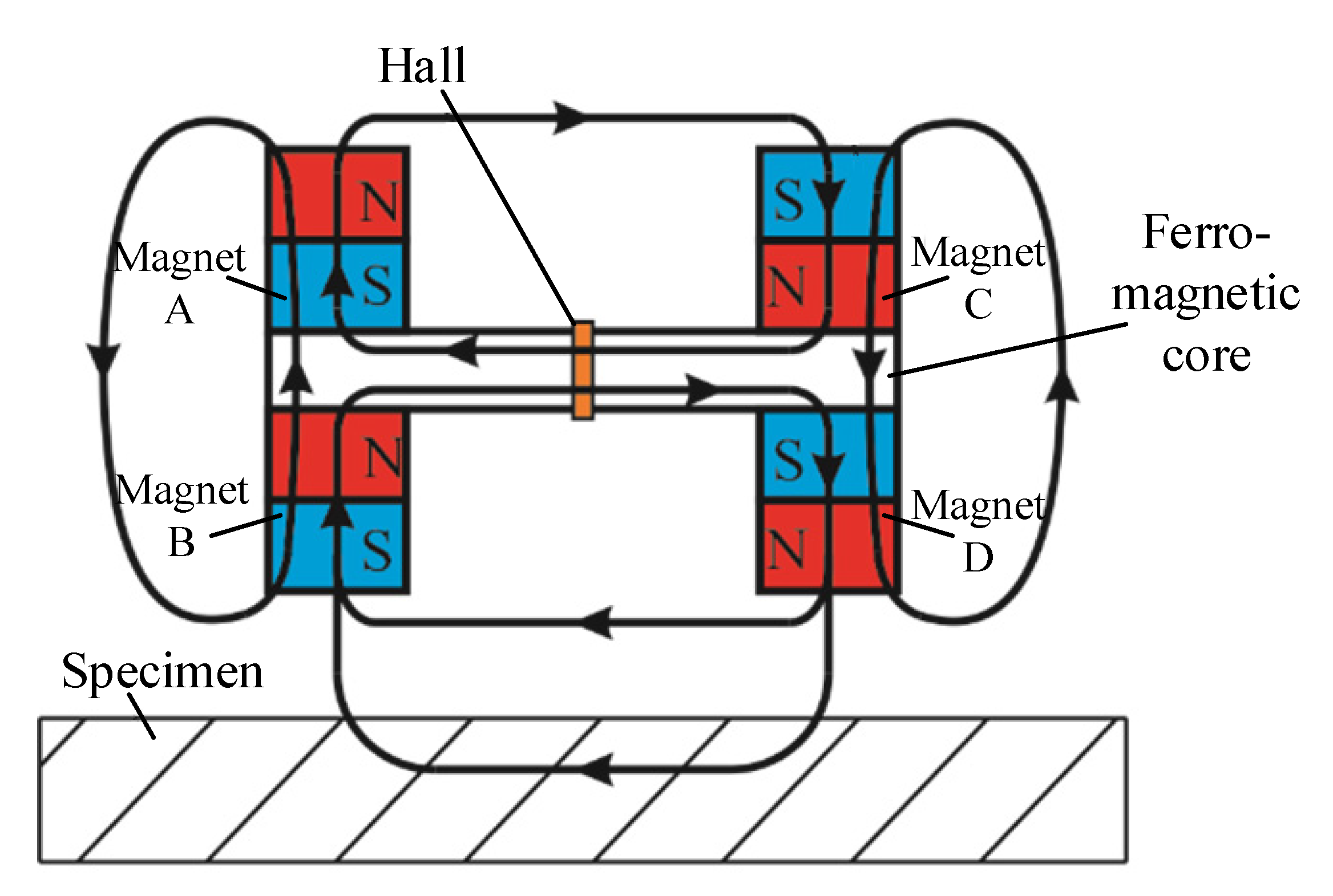
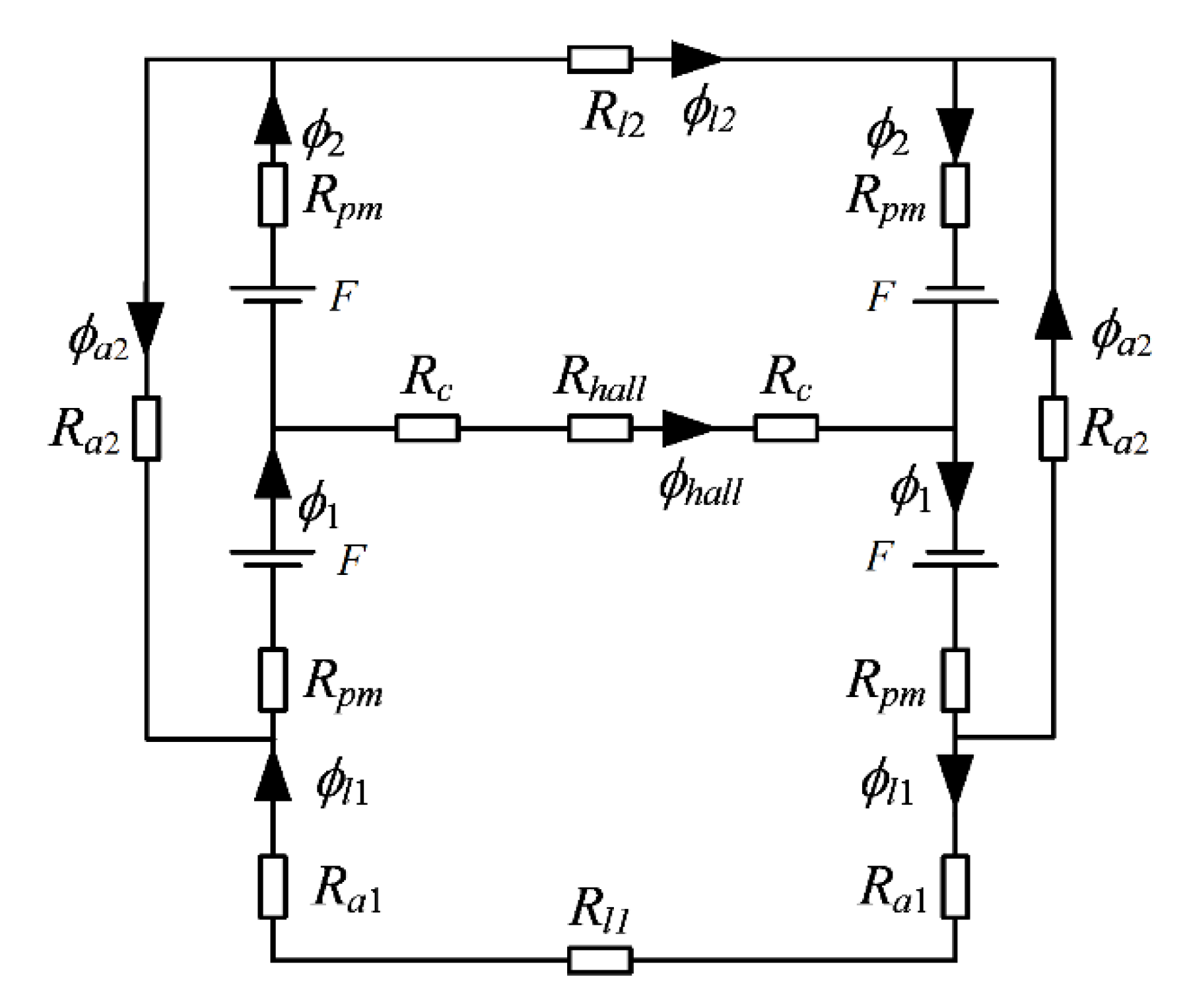
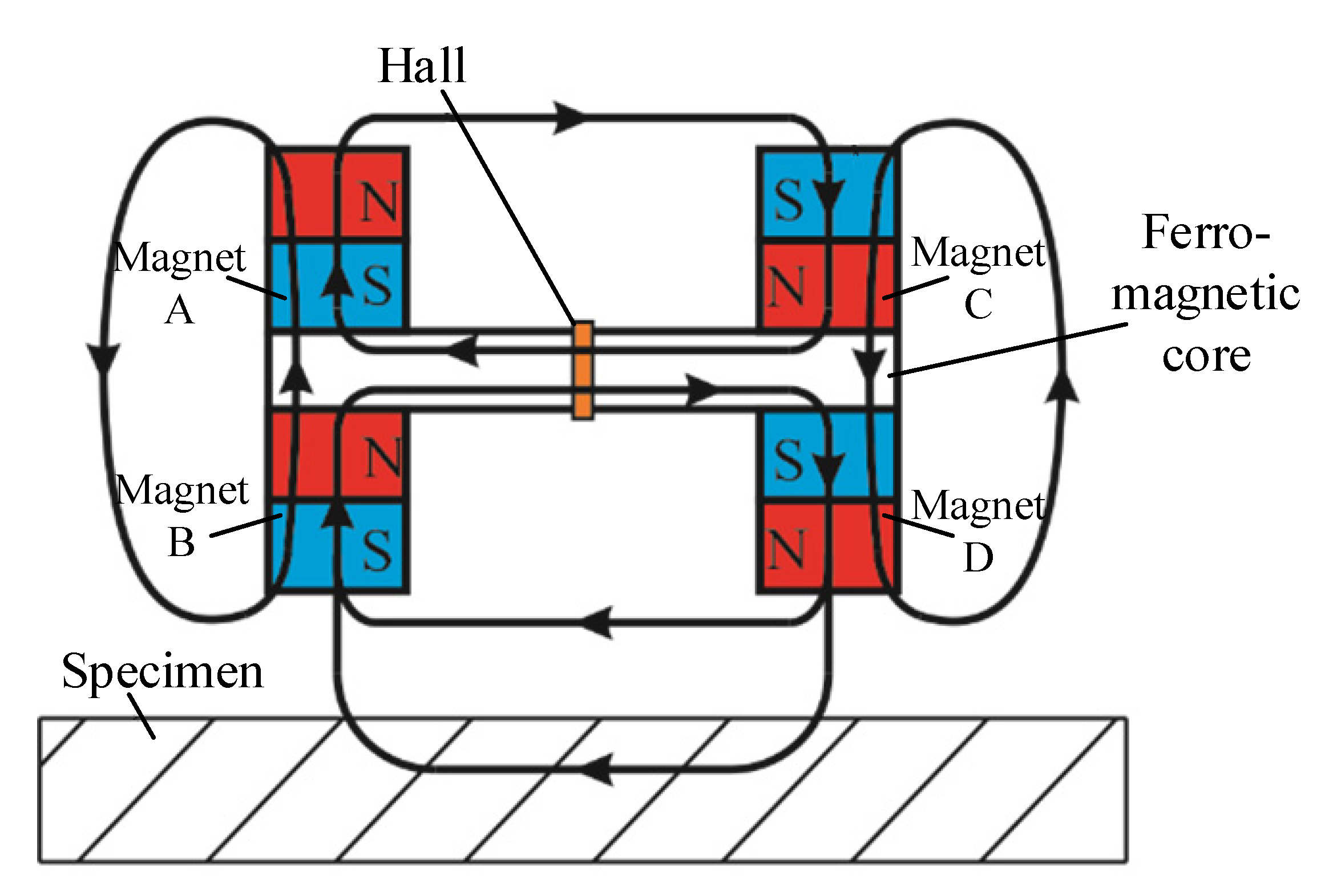
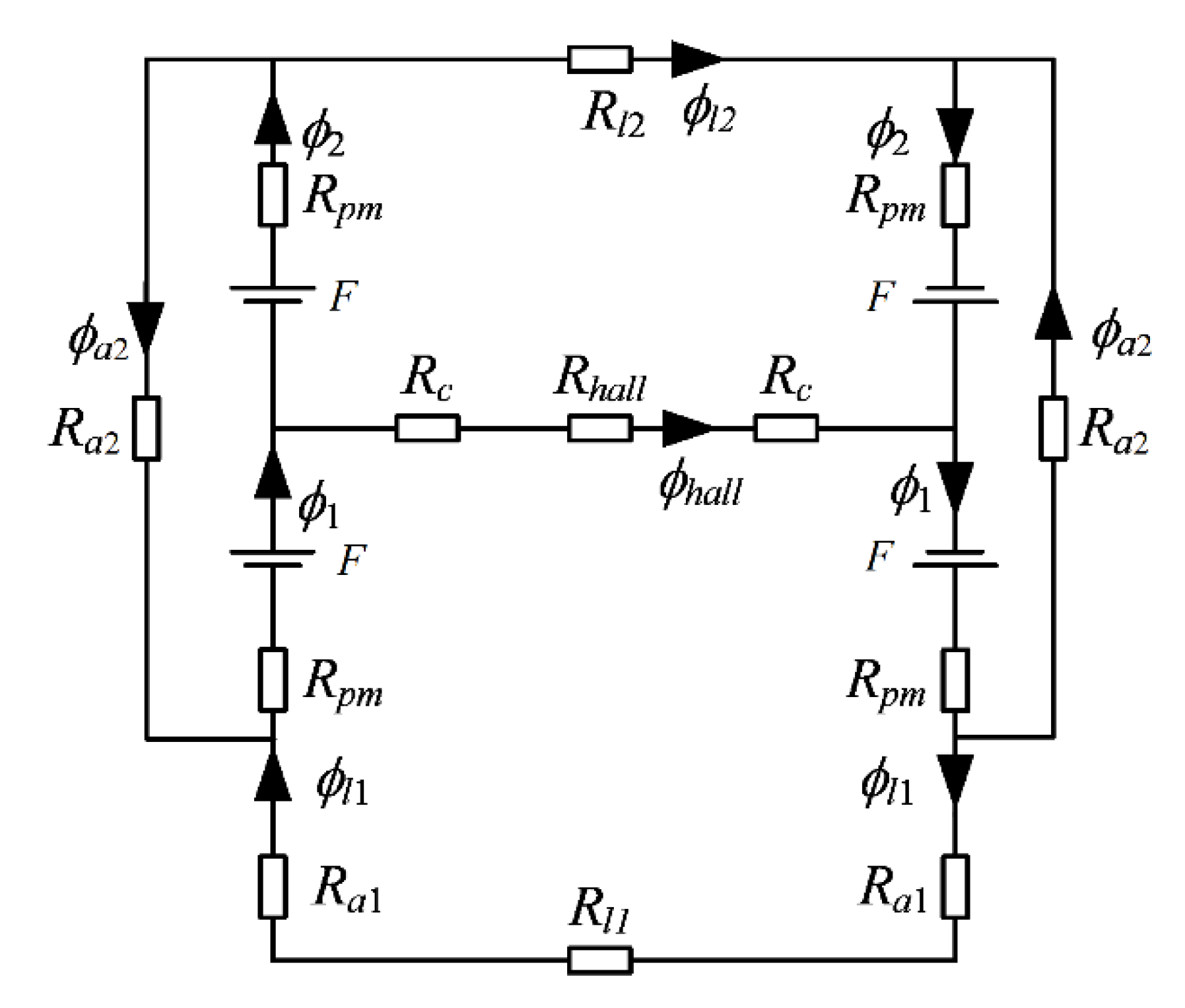
2.2. Bridge-Structured PM-MFM Sensor
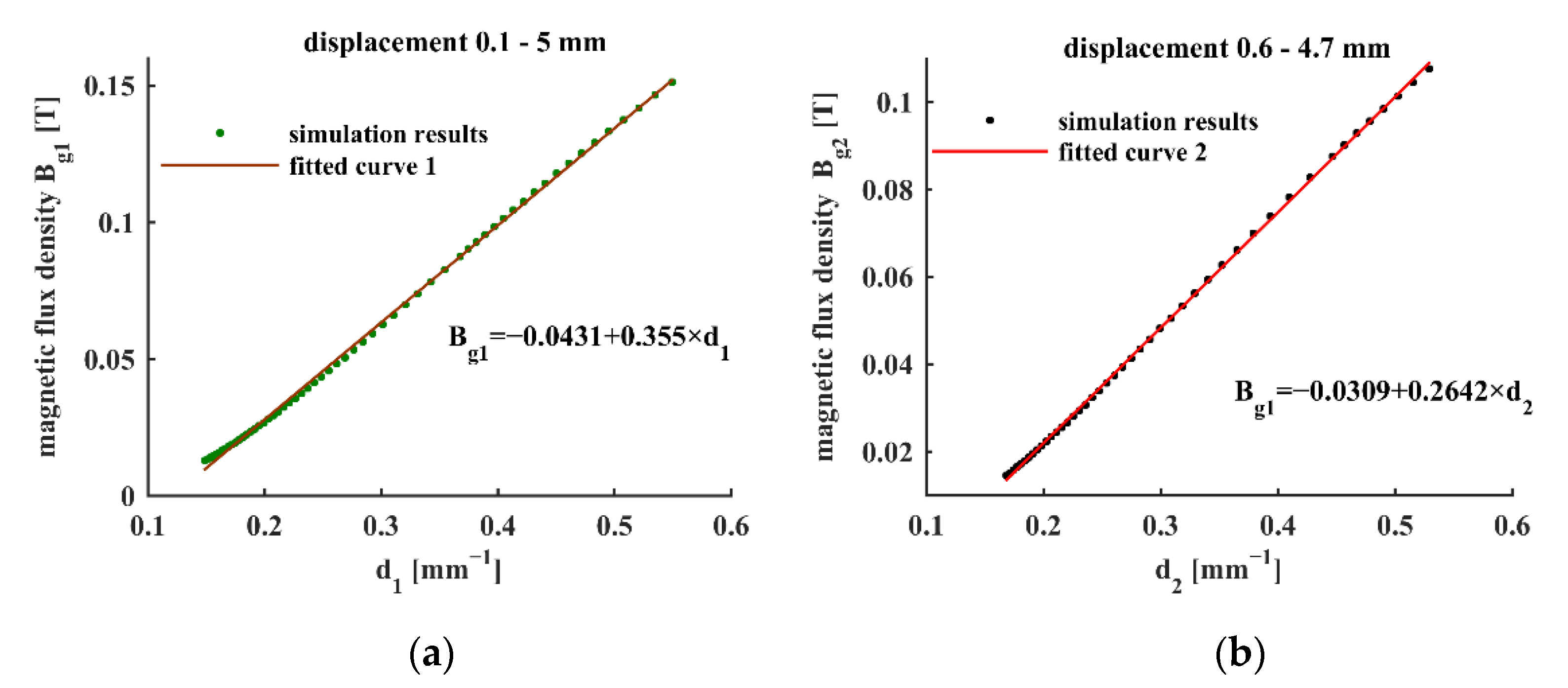
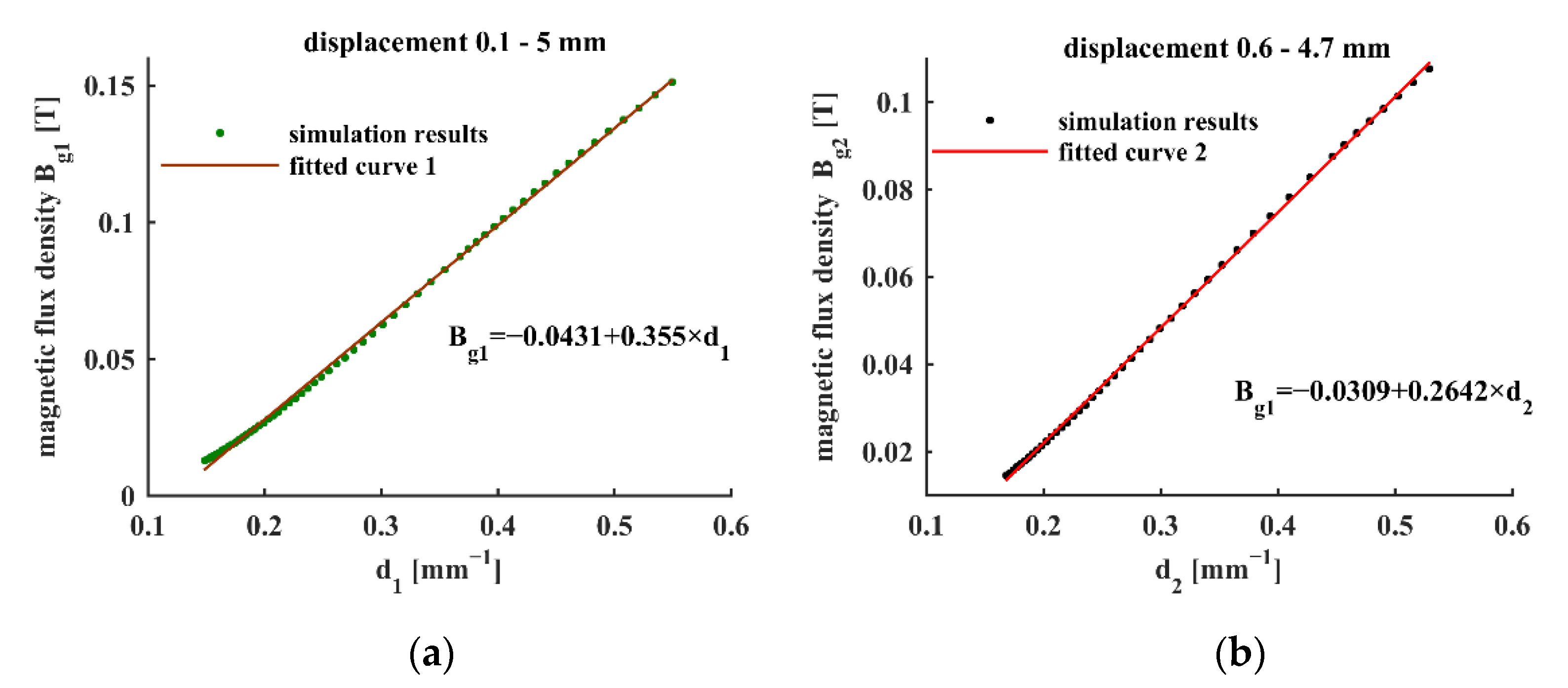
3. Simulation
4. Experiments
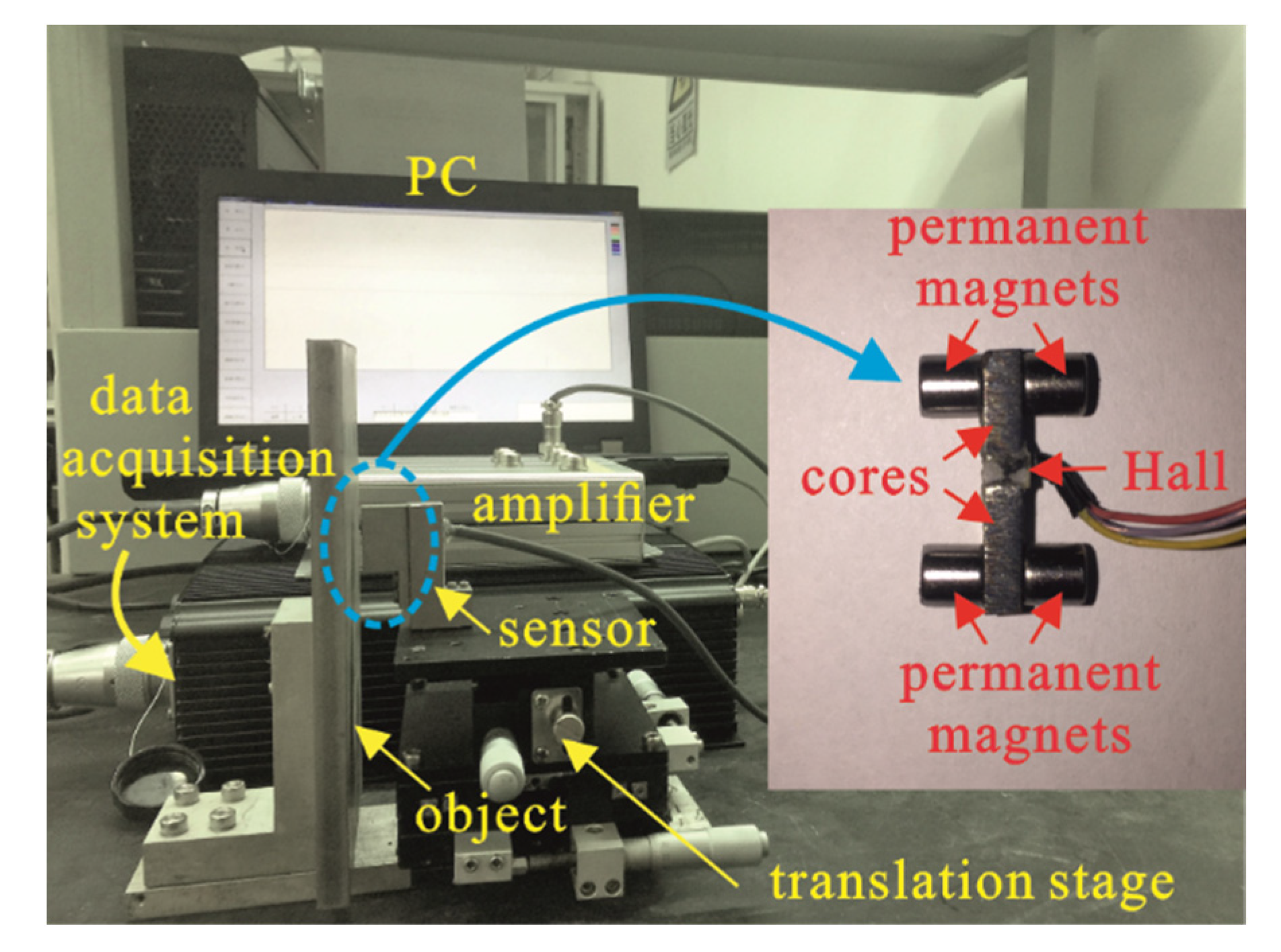
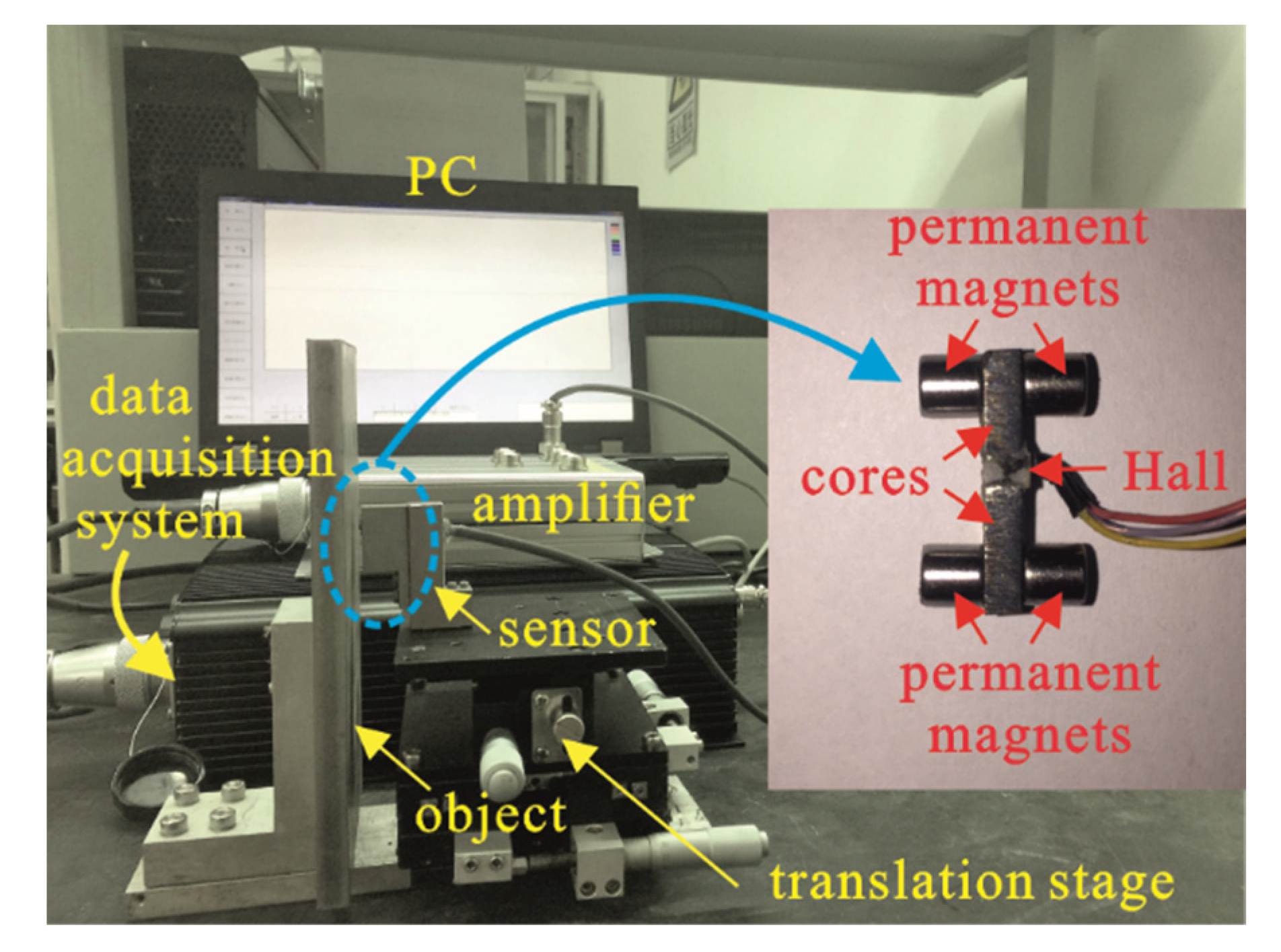
4.1. Experimental Setup
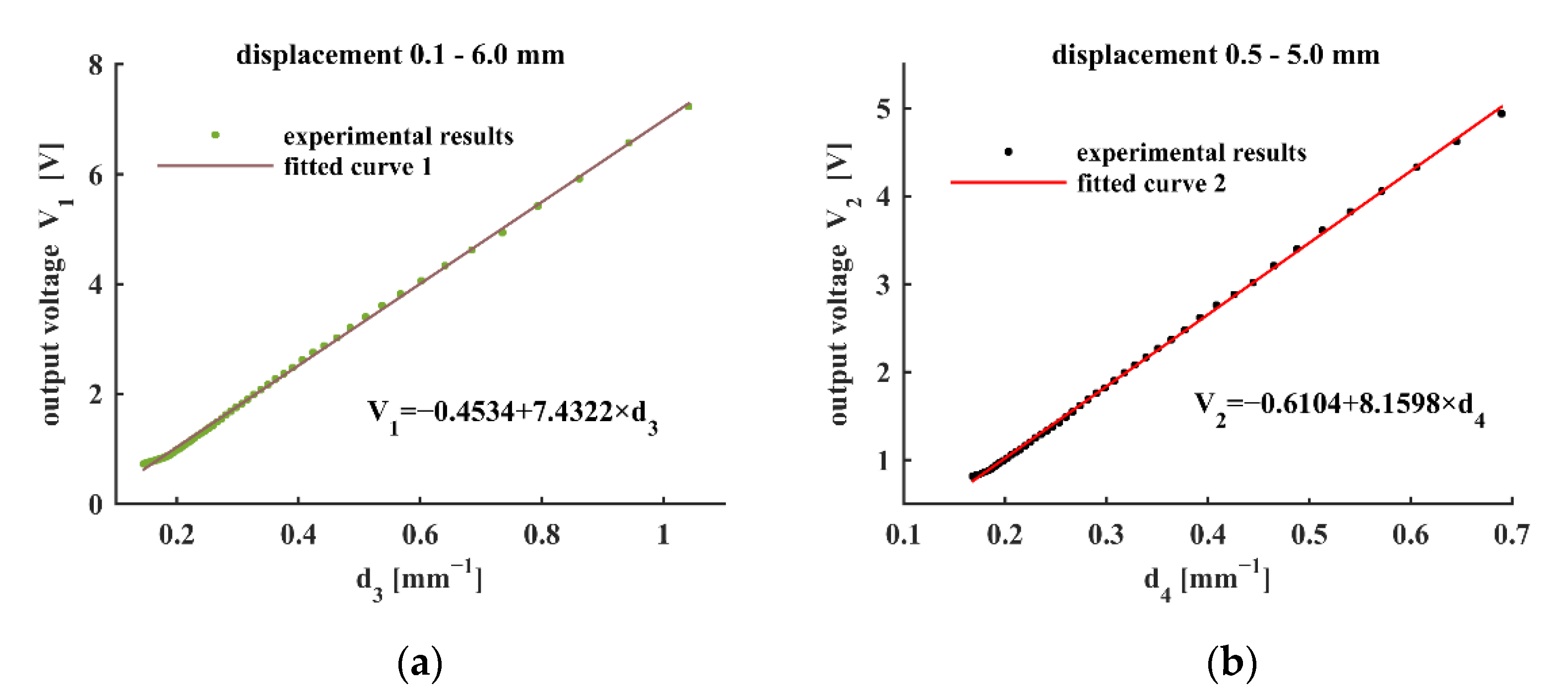
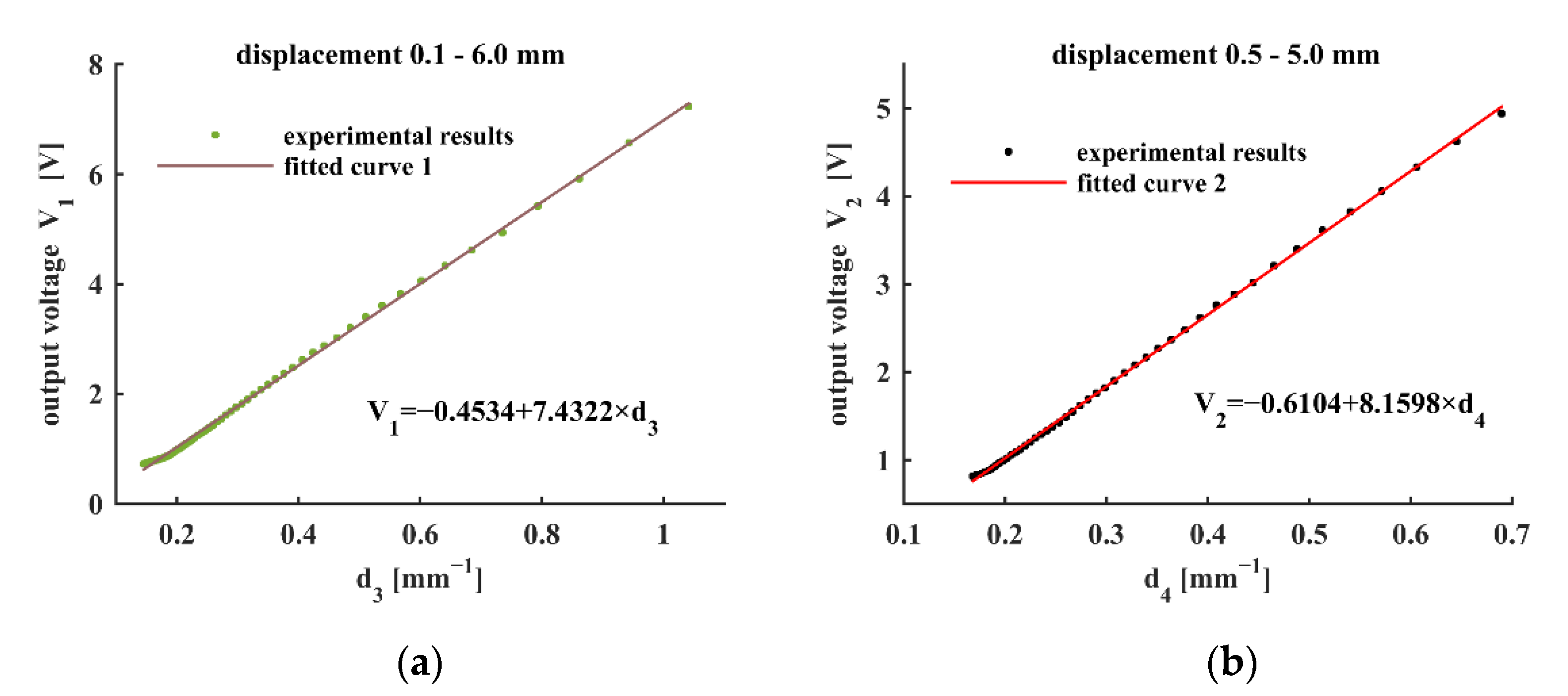
4.2. Experimental Results
4.3. Influence of Specimen Property on the Measurement Result
4.4. Discussion
5. Comparisons between PM-MFM Sensor and AC-MFM Sensor
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- George, B.; Tan, Z.; Nihtianov, S. Advances in Capacitive, Eddy Current, and Magnetic Displacement Sensors and Corresponding Interfaces. IEEE Trans. Ind. Electron. 2017, 12, 9595–9607. [Google Scholar] [CrossRef]
- Kim, M.; Moon, W. A new linear encoder-like capacitive displacement sensor. Measurement 2006, 39, 481–489. [Google Scholar] [CrossRef]
- Liu, X.; Peng, K.; Chen, Z.; Pu, H.; Yu, Z. A New Capacitive Displacement Sensor with Nanometer Accuracy and Long Range. IEEE Sens. J. 2016, 8, 2306–2316. [Google Scholar] [CrossRef]
- Kim, M.; Moon, W.; Yoon, E.; Lee, K. A new capacitive displacement sensor with high accuracy and long-range. Sens. Actuators A Phys. 2006, 130, 135–141. [Google Scholar] [CrossRef]
- Pu, H.; Liu, H.; Liu, X.; Peng, K.; Yu, Z. A novel capacitive absolute positioning sensor based on time grating with nanometer resolution. Mech. Syst. Signal Process. 2018, 104, 705–715. [Google Scholar] [CrossRef]
- Babu, A.; George, B. Design and Development of a New Non-Contact Inductive Displacement Sensor. IEEE Sens. J. 2018, 3, 976–984. [Google Scholar] [CrossRef]
- Biddle, C.C. Theory of Eddy Currents for Nondestructive Testing. Master’s Thesis, University of Central Florida, Orlando, FL, USA, 1976. [Google Scholar]
- Yamaguchi, T.; Iwai, Y.; Inagaki, S.; Ueda, M. A method for detecting bearing wear in a an eddy-current displacement drain pump utilizing sensor. Measurement 2003, 33, 205–211. [Google Scholar] [CrossRef]
- Kim, J.; Yang, G.; Udpa, L.; Udpa, S. Classification of pulsed eddy current GMR data on aircraft structures. NDT E Int. 2010, 43, 141–144. [Google Scholar] [CrossRef]
- Roy, D.; Kaushik, B.K.; Chakraborty, R. A novel E-shaped coil for eddy current testing. Sens. Rev. 2013, 4, 363–370. [Google Scholar] [CrossRef]
- Wang, P.; Fu, Z.; Ding, T. A frameless eddy current sensor for cryogenic displacement measurement. Sens. Actuators A Phys. 2010, 159, 7–11. [Google Scholar] [CrossRef]
- Wang, H.; Liu, Y.; Li, W.; Feng, Z. Design of ultrastable and high resolution eddy-current displacement sensor system. In Proceedings of the IECON 2014—40th Annual Conference of the IEEE Industrial Electronics Society, Dallas, TX, USA, 29 October–1 November 2014; pp. 2333–2339. [Google Scholar]
- Chaturvedi, V.; Nabavi, M.R.; Vogel, J.G.; Nihtianov, S. Demodulation Techniques for Self-Oscillating Eddy-Current Displacement Sensor Interfaces: A Review. IEEE Sens. J. 2017, 9, 2617–2624. [Google Scholar] [CrossRef]
- Nabavi, M.R.; Nihtianov, S.N. Design Strategies for Eddy-Current Displacement Sensor Systems: Review and Recommendations. IEEE Sens. J. 2012, 12, 3346–3355. [Google Scholar] [CrossRef]
- Nabavi, M.R.; Pertijs, M.A.P.; Nihtianov, S. An Interface for Eddy-Current Displacement Sensors With 15-bit Resolution and 20 MHz Excitation. IEEE J. Solid-State Circuits 2013, 11, 2868–2881. [Google Scholar] [CrossRef]
- Zhu, C.; Chen, Y.; Du, Y.; Zhuang, Y.; Liu, F.; Gerald, R.E.; Huang, J. A Displacement Sensor with Centimeter Dynamic Range and Submicrometer Resolution Based on an Optical Interferometer. IEEE Sens. J. 2017, 17, 5523–5528. [Google Scholar] [CrossRef]
- Azcona, F.J.; Atashkhooei, R.; Royo, S.; Astudillo, J.M.; Jha, A. A Nanometric Displacement Measurement System Using Differential Optical Feedback Interferometry. IEEE Photon. Technol. Lett. 2013, 21, 2074–2077. [Google Scholar] [CrossRef]
- Campos-Puebla, J.J.; Sánchez-Pérez, C.; Argueta-Díaz, V. Optical Submicrometer Displacement Sensor Based on the Herriot Cell. IEEE Sens. J. 2017, 6, 1715–1720. [Google Scholar] [CrossRef]
- Guo, Y.; Wang, Y.; Jin, M. Improvement of measurement range of optical fiber displacement sensor based on neutral network. Optik 2014, 125, 126–129. [Google Scholar] [CrossRef]
- Lin, F.; Smith, S.T.; Hussain, G. Optical fiber displacement sensor and its application to tuning fork response measurement. Precis. Eng. 2012, 4, 620–628. [Google Scholar] [CrossRef]
- Ortner, M.; Seger, M.; Ribeiro, M.; Satz, A. Signal analysis in back bias speed sensor systems. In Proceedings of the 2013 European Modelling Symposium, Manchester, UK, 20–22 November 2013. [Google Scholar]
- Marcsaa, D.; Veressb, Á.; Szegletesa, J.; Oroszvary, L.; Molnar, L. Performance analysis of passive wheel speed sensor by 3D finite element method. Int. J. Appl. Electromagn. Mech. 2019, 61, 509–517. [Google Scholar] [CrossRef]
- Anastasiadis, I.; Werth, T.; Preis, K. Evaluation and Optimization of Back-Bias Magnets for Automotive Applications Using Finite-Element Methods. IEEE Trans. Magn. 2009, 45, 1332–1335. [Google Scholar] [CrossRef]
- Wang, S.; Wu, Z.; Peng, D.; Li, W.; Chen, S.; Liu, S. An angle displacement sensor using a simple gear. Sens. Actuators A 2018, 270, 245–251. [Google Scholar] [CrossRef]
- Treutler, C.P.O. Magnetic sensors for automotive applications. Sens. Actuators A 2001, 91, 2–6. [Google Scholar] [CrossRef]
- Sreevidya, P.V.; Borole, U.P.; Kadam, R.; Khan, J.; Barshilia, H.C.; Chowdhury, P. A novel AMR based angle sensor with reduced harmonic errors for automotive applications. Sens. Actuators A 2021, 324, 112573. [Google Scholar]
- Ortner, M.; Ribeiro, M.; Spitzer, D. Absolute Long-Range Linear Position System with a Single 3-D Magnetic Field Sensor. IEEE Trans. Magn. 2019, 55, 4000104. [Google Scholar] [CrossRef]
- Malagò, P.; Slanovc, F.; Herzog, S.; Lumetti, S.; Schaden, T.; Pellegrinetti, A.; Moridi, M.; Abert, C.; Suess, D.; Ortner, M. Magnetic Position System Design Method Applied to Three-Axis Joystick Motion Tracking. Sensors 2020, 20, 6873. [Google Scholar] [CrossRef] [PubMed]
- Sakon, T.; Matsumoto, T.; Komori, T. Rotation angle sensing system using magnetostrictive alloy Terfenol-D and permanent magnet. Sens. Actuators A 2021, 321, 112588. [Google Scholar] [CrossRef]
- Venkataraman, K.; Abu, S.; Tomas, T.; Pantazi, A.; Pozidis, H.; Sahoo, D.R. High-bandwidth nanopositioner with magnetoresistance based position sensing. Mechatronics 2012, 22, 295–301. [Google Scholar]
- Evangelos, E. Nanopositioning for storage applications. Annu. Rev. Control. 2012, 36, 244–254. [Google Scholar]
- Zhang, J.; Wang, R.; Deng, Z.; Kang, Y. A displacement sensing method based on alternating current magnetic flux measurement. Meas. Sci. Technol. 2018, 29, 085010. [Google Scholar] [CrossRef]
- Jonidecha, C.; Prateepasen, A. Design of modified electromagnetic main-flux for steel wire rope inspection. NDT E Int. 2009, 42, 77–83. [Google Scholar] [CrossRef]
- Christen, R.; Bergamini, A.; Motavalli, M. Influence of steel wrapping on magneto-inductive testing of the main cables of suspension bridges. NDT E Int. 2009, 42, 22–27. [Google Scholar]
- Christen, R.; Bergamini, A.; Motavalli, M. Three-dimensional localization of defects in stay cables using magnetic flux leakage methods. J. Nondestruct. Eval. 2003, 3, 93–101. [Google Scholar] [CrossRef]
- Hoeijmakers, M.J. A fundamental approach of the derivation of AC-machine equations by means of space vectors. In Proceedings of the IEEE Africon, Stellenbosch, South Africa, 27 September 1996; Volume 1, pp. 178–183. [Google Scholar]
- Fuchs, E.F.; Erdelyi, E.A. Nonlinear Theory of Turboalternators Part I: Magnetic Fields at No-Load and Balanced Loads. IEEE Trans. Power App. Syst. 1973, 2, 583–591. [Google Scholar] [CrossRef]
- Gieras, J.F. Permanent Magnet Motor Technology: Design and Applications; CRC Press: Boca Raton, FL, USA, 2009; pp. 43–49. [Google Scholar]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Size (mm) | Material | |
|---|---|---|
| Permanent magnet | 2.5 (radius) × 3 (height) | NdFeB |
| Ferromagnetic core | 6.75 (length) × 5 (width) × 2 (height) | 45# steel |
| Steel plate | 20 (length) × 10 (width) × 3 (height) | 45# steel |
| 0.1–5.0 mm | 0.6–4.7 mm | ||||
|---|---|---|---|---|---|
| D3 (mm) | R2 | ε (%) | D3 (mm) | R2 | ε (%) |
| 1.43 | 0.9990 | 38.83 | 1.04 | 0.9990 | 6.04 |
| 1.45 | 0.9991 | 36.60 | 1.09 | 0.9993 | 5.34 |
| 1.48 | 0.9992 | 34.37 | 1.14 | 0.9994 | 4.64 |
| 1.52 | 0.9993 | 28.78 | 1.19 | 0.9996 | 3.94 |
| 1.57 | 0.9993 | 23.18 | 1.24 | 0.9996 | 3.25 |
| 1.60 | 0.9993 | 19.82 | 1.27 | 0.9997 | 2.83 |
| 1.65 | 0.9992 | 14.21 | 1.34 | 0.9996 | 3.49 |
| 1.72 | 0.9991 | 7.50 | 1.39 | 0.9996 | 3.93 |
| 1.75 | 0.9990 | 7.82 | 1.50 | 0.9993 | 4.71 |
| 1.80 | 0.9988 | 8.32 | 1.60 | 0.9990 | 5.47 |
| Size (mm) | Material | |
|---|---|---|
| Permanent magnet | 5 (radius) × 5 (height) | NdFeB |
| Ferromagnetic core | 10 (length) × 6 (width) × 3 (height) | 45# steel |
| 0.1–5.0 mm | 0.6–4.7 mm | ||||
|---|---|---|---|---|---|
| D3 (mm) | R2 | ε (%) | D3 (mm) | R2 | ε (%) |
| 0.76 | 0.9981 | 26.43 | 0.83 | 0.9989 | 7.11 |
| 0.78 | 0.9984 | 22.69 | 0.86 | 0.9991 | 6.34 |
| 0.80 | 0.9987 | 18.91 | 0.89 | 0.9993 | 5.57 |
| 0.82 | 0.9989 | 15.09 | 0.92 | 0.9995 | 4.80 |
| 0.84 | 0.9991 | 11.22 | 0.95 | 0.9996 | 4.35 |
| 0.86 | 0.9992 | 9.75 | 0.98 | 0.9996 | 4.77 |
| 0.88 | 0.9992 | 10.33 | 1.01 | 0.9996 | 5.17 |
| 0.90 | 0.9992 | 10.88 | 1.04 | 0.9996 | 5.55 |
| 0.92 | 0.9991 | 11.40 | 1.07 | 0.9993 | 5.91 |
| 0.94 | 0.9990 | 11.89 | 1.10 | 0.9990 | 6.24 |
| Real Displacement | Measured Displacement | Average Value | Maximum Error (%) | ||||
|---|---|---|---|---|---|---|---|
| 45# | 20# | Q345 | 38Cr | 40CrNi | |||
| 0.5 | 0.520 | 0.517 | 0.519 | 0.523 | 0.522 | 0.520 | 4.60 |
| 0.8 | 0.797 | 0.782 | 0.790 | 0.805 | 0.797 | 0.794 | 2.25 |
| 1.1 | 1.085 | 1.071 | 1.078 | 1.092 | 1.086 | 1.080 | 2.64 |
| 1.4 | 1.388 | 1.390 | 1.389 | 1.395 | 1.404 | 1.393 | 0.86 |
| 1.7 | 1.690 | 1.673 | 1.676 | 1.696 | 1.681 | 1.683 | 1.59 |
| 2.0 | 1.985 | 1.975 | 1.972 | 1.987 | 1.996 | 1.983 | 1.40 |
| 2.3 | 2.300 | 2.317 | 2.286 | 2.345 | 2.337 | 2.317 | 1.96 |
| 2.6 | 2.597 | 2.613 | 2.588 | 2.624 | 2.610 | 2.606 | 0.92 |
| 2.9 | 2.935 | 2.926 | 2.918 | 2.952 | 2.957 | 2.938 | 1.97 |
| 3.2 | 3.255 | 3.242 | 3.270 | 3.255 | 3.260 | 3.256 | 2.19 |
| 3.5 | 3.557 | 3.567 | 3.528 | 3.550 | 3.537 | 3.548 | 1.91 |
| 3.8 | 3.849 | 3.793 | 3.821 | 3.871 | 3.889 | 3.845 | 2.34 |
| 4.1 | 4.149 | 4.117 | 4.024 | 4.181 | 4.158 | 4.126 | 1.98 |
| 4.4 | 4.435 | 4.417 | 4.410 | 4.460 | 4.449 | 4.434 | 1.36 |
| 4.7 | 4.645 | 4.664 | 4.633 | 4.657 | 4.649 | 4.650 | 1.43 |
| 5.0 | 4.783 | 4.835 | 4.795 | 4.848 | 4.823 | 4.817 | 4.34 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, J.; Shi, Y.; Huang, Y.; Liang, C.; Dong, Y.; Kang, Y.; Feng, B. A Displacement Sensing Method Based on Permanent Magnet and Magnetic Flux Measurement. Sensors 2022, 22, 4326. https://doi.org/10.3390/s22124326
Zhang J, Shi Y, Huang Y, Liang C, Dong Y, Kang Y, Feng B. A Displacement Sensing Method Based on Permanent Magnet and Magnetic Flux Measurement. Sensors. 2022; 22(12):4326. https://doi.org/10.3390/s22124326
Chicago/Turabian StyleZhang, Jikai, Yicheng Shi, Yuewen Huang, Cheng Liang, Yantong Dong, Yihua Kang, and Bo Feng. 2022. "A Displacement Sensing Method Based on Permanent Magnet and Magnetic Flux Measurement" Sensors 22, no. 12: 4326. https://doi.org/10.3390/s22124326
APA StyleZhang, J., Shi, Y., Huang, Y., Liang, C., Dong, Y., Kang, Y., & Feng, B. (2022). A Displacement Sensing Method Based on Permanent Magnet and Magnetic Flux Measurement. Sensors, 22(12), 4326. https://doi.org/10.3390/s22124326