1. Introduction
With the impact of the global new crown epidemic, shopping without leaving home is encouraged by the state to reduce the spread of the epidemic brought about by the gathering of people. Online shopping for small items usually does not require consideration of size, and returns and exchanges are easier to carry, but online shopping for medium to large furniture products can have certain drawbacks. Traditional furniture procurement is mainly based on subjective feelings to infer the placement of furniture in the room and placement effect; this approach will cause the purchase of furniture back in the actual placement effect and the size of the house and furniture color with the incongruity. The return of furniture products is quite time consuming and laborious, so the current furniture procurement model is mostly offline procurement. Offline furniture city furniture format is relatively fixed and cannot provide users in the shopping site favorite personalized furniture products, according to the website furniture picture to get the same model for real-time home experience product suitability of the new way to call out.
Augmented Reality (AR) technology, as an important technical support for the underlying technology of “metaverse”, displays virtual models or information in the real world for interaction, which can usually assist users to display and work in reality [
1]. With the increase in the computing power of electronic products, AR technology is used in all aspects of people’s lives. Viewing a single image of furniture on a shopping website and creating a 3D model that can be used for AR in real time has become a new way of shopping [
2]. Although many scholars have investigated how to reconstruct 3D models from single images, the premise is based on clean, background-free example objects. Since furniture images on websites usually contain complex backgrounds, three problems need to be addressed: first, the need to extract clean furniture images from complex backgrounds; second, 3D reconstruction based on individual furniture images; and third, accurate registration of the reconstructed 3D models into the real environment.
This paper aims to combine 3D reconstruction technology and augmented reality related technology to develop an AR home environment system capable of real-time 3D reconstruction based on furniture pictures, as well as AR browsing and furniture placement based on users’ online shopping furniture product scenes. The system can basically satisfy the user to reconstruct the furniture pictures with complex backgrounds when browsing the shopping website and pre-process the pictures to remove the backgrounds to get a clean furniture example picture, reconstruct the 2D furniture pictures in 3D to get a 3D model of furniture, and then use AR technology to apply the furniture model to arrange the home environment to realize the virtual shopping function. The main contributions of this paper are the following.
This paper proposes a Bayesian image background segmentation (Bayesian Classifier and GrabCut, BCGC) algorithm, which can segment the furniture instance map more accurately by combining a Bayesian classifier with the GrabCut algorithm;
Based on the advanced 3D reconstruction network ONet network, a precise occupancy network (PONet) is proposed. PONet adds camera information, combines local features as well as global feature information, adds a two-branch probability estimation, and finally outputs the occupancy probability of each of its points to achieve the effect of 3D mesh reconstruction model;
Based on the markerless tracking registration method, the AKAZE algorithm is improved, and a Multiple Filtering-AKAZE (MF-AKAZE) algorithm is proposed to achieve real-time tracking and localization of the model.
2. Related Work
The reconstruction of 3D models from single images has become a hot topic in recent years with the widespread use of deep learning, and research on 3D reconstruction by deep learning has been accelerated by the proposal of large 3D model datasets and end-to-end learning frameworks [
3]. Inspired by the ability to achieve reconstruction using a priori information, Choy [
4] proposed a 3D recurrent neural network 3D-R2N2 (3D Recurrent Reconstruction Neural Network), which learns 2D images from an image dataset, establishes a mapping relationship between the 3D model and the image, and infers a voxelized model based on multiple images of the same object.
Although the voxel representation method can reconstruct a 3D model of an object based on a single image, the reconstructed model is mostly a 3D model with low resolution due to ignoring the natural invariance of the 3D shape and therefore has certain drawbacks. The point cloud-based representation method scans the set of points on the outer surface of the object by the device, which can effectively overcome the drawback of the natural invariance of the object under geometric transformation using the voxel method. Hao [
5] proposed a point set generation network (PSGN) based on point sets, and the network designed a bar shape sampler to predict multiple point clouds based on a single picture. The network is designed with a bar shape sampler to predict multiple point cloud forms based on a single image, solving the problem of a large number of unsuitable models. A hourglass convolutional network is introduced in the network structure to iteratively encode and decode it to produce better aggregation capability [
6].
It is difficult to reconstruct a 3D model with a continuous surface to be applied to a real scene because the point cloud method loses information on the model surface. To solve the above problems, Kato [
7] proposed a rasterized approximate gradient that integrates the rendering of the model into a neural network and performs single-image 3D reconstruction using contour image supervision. After the experiments, it was shown that this approach is more intuitive and better reconstruction compared to the point cloud-based representation. Kong [
8] estimated dense 3D models from single images using a low-dimensional embedding space, which preserves the geometric features of the models.
In recent years, an implicit surface representation-based 3D reconstruction of objects has gradually been developed. Li et al. [
9] proposed a Field Probing Neural Network (FPNN) to utilize 3D fields as the basic representation of 3D shapes. The algorithm is inspired by the inefficient voxel approach, and instead of 3D convolution computation uses multiple detection filters to sample the 3D fields. Park et al. [
10] proposed a network structure called DeepSDF for learning the symbolic distance function of the shape representation. This learning framework represents the shape as a continuous 3D field, encodes the boundary of the shape as a zero level set of the learning function, and encodes the whole space with positive and negative symbolic distance lengths Distinguish whether the feature points belong to the exterior or interior. The advantage of this model is that it can represent not only the SDF of a single shape but also a class of shapes. Meschder et al. [
11] proposed an Occupancy Network (ONet) architecture capable of reconstructing the space of 3D shape functions from different input patterns. The network framework formulates the reconstruction task as a binary classification problem, and the surface of the model represents the decision boundary of the classifier. The basic idea of the algorithm is to pre-train a ResNet image encoder and send a 2D image as input to the encoder to generate an embedding representation of the input. Peng et al. [
12] proposed a convolutional occupancy network that combines a convolutional encoder with an implicit occupancy decoder for structured reasoning in 3D space, which can intern fine-grained implicit 3D reconstruction of a single object.
AR technology is characterized by a combination of virtual reality, real-time interaction, and three-dimensional (3D) alignment [
13]. Among them, 3D alignment is the core of the AR system and a key metric to evaluate the performance of the AR system, which is to solve the real-time mapping between 3D target objects in the real world and two-dimensional (2D) screens [
14]. However, the natural feature-based 3D alignment method takes some time to extract feature points and is prone to feature point mismatches, requiring a computational process to remove redundant points. This is a challenge to the real-time performance of the system, which cannot completely eliminate the mismatch [
15]. Feature extraction and matching are key issues for natural feature-based alignment.
Currently, the more commonly used feature-based matching algorithms are Scale Invariant Feature Transformation (SIFT) [
16], Accelerated Robust Feature (SURF) [
17], and Oriented Rapid Rotation Sketch (ORB) [
18]. Dai et al. [
19] improved the real-time performance of tracking by combining SURF with ORB based on the dichotomous segmentation of images, but the robustness of the algorithm was degraded. A scale-invariant image matching method to address very large changes in the view was proposed by Zhou et al. [
20]. However, the application in the built environment is vulnerable to factors such as illumination, scale, and angle, which leads to poor matching. Huang et al. [
21] proposed a novel image matching method based on SIFT and LPP. Zhou et al. [
22] proposed SIFT in GMS selected regions (SIGMA), an effective mismatch elimination based on SIFT and GMS point-based method. The above studies are all based on Gaussian kernel functions to construct a scale space. This will lead to the loss of image edge information, which will seriously affect the stability of feature points and descriptors [
23]. For this reason, some scholars have started to study the nonlinear filtering function for constructing the scale space. This method can better preserve image details and has a stronger adaptability to scale changes. Currently, KAZE [
24] and AKAZE [
25] are mainstream algorithms. Experiments show that the above algorithms have stronger robustness than orb and SIFT.
3. Methods
3.1. System Architecture
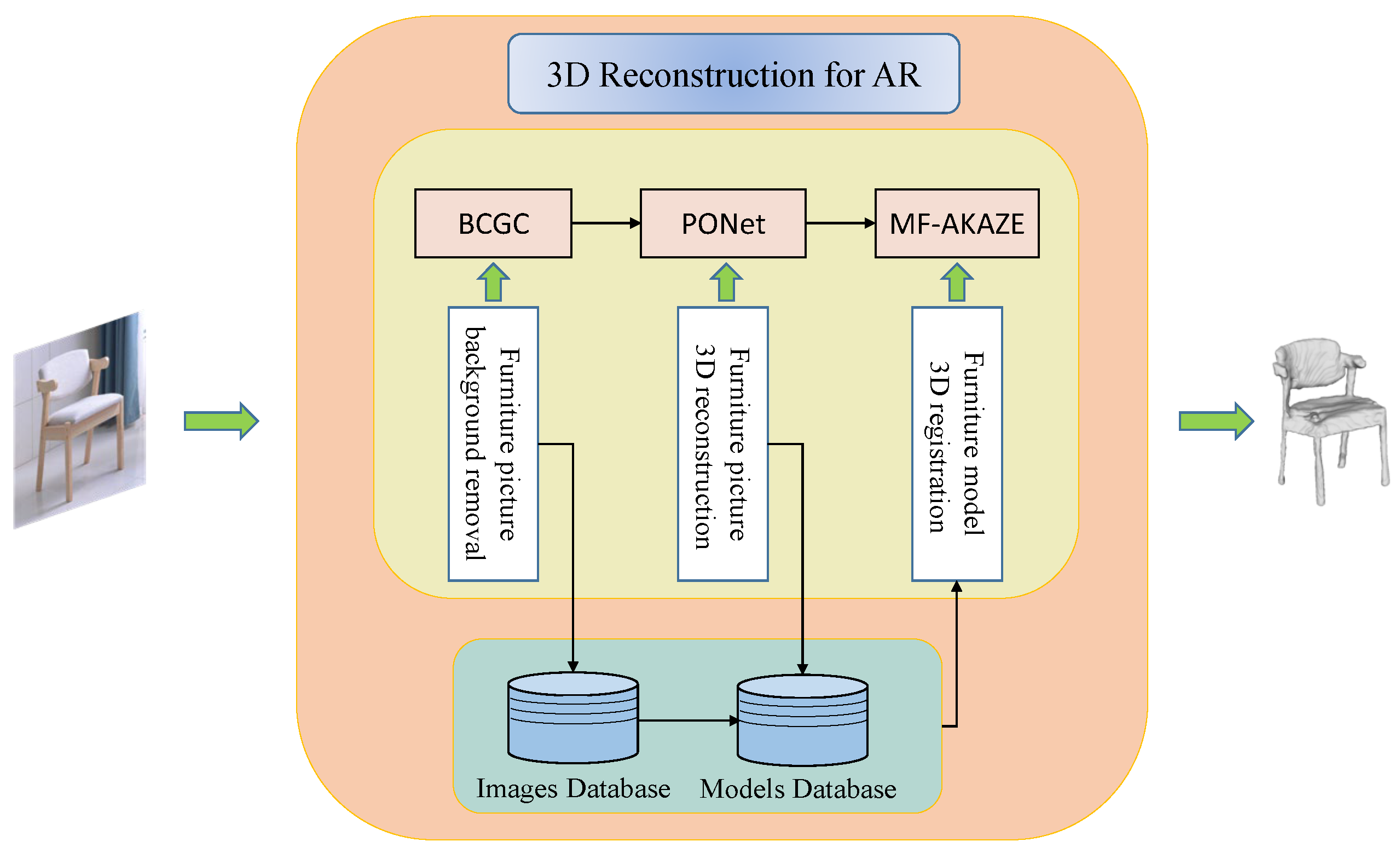
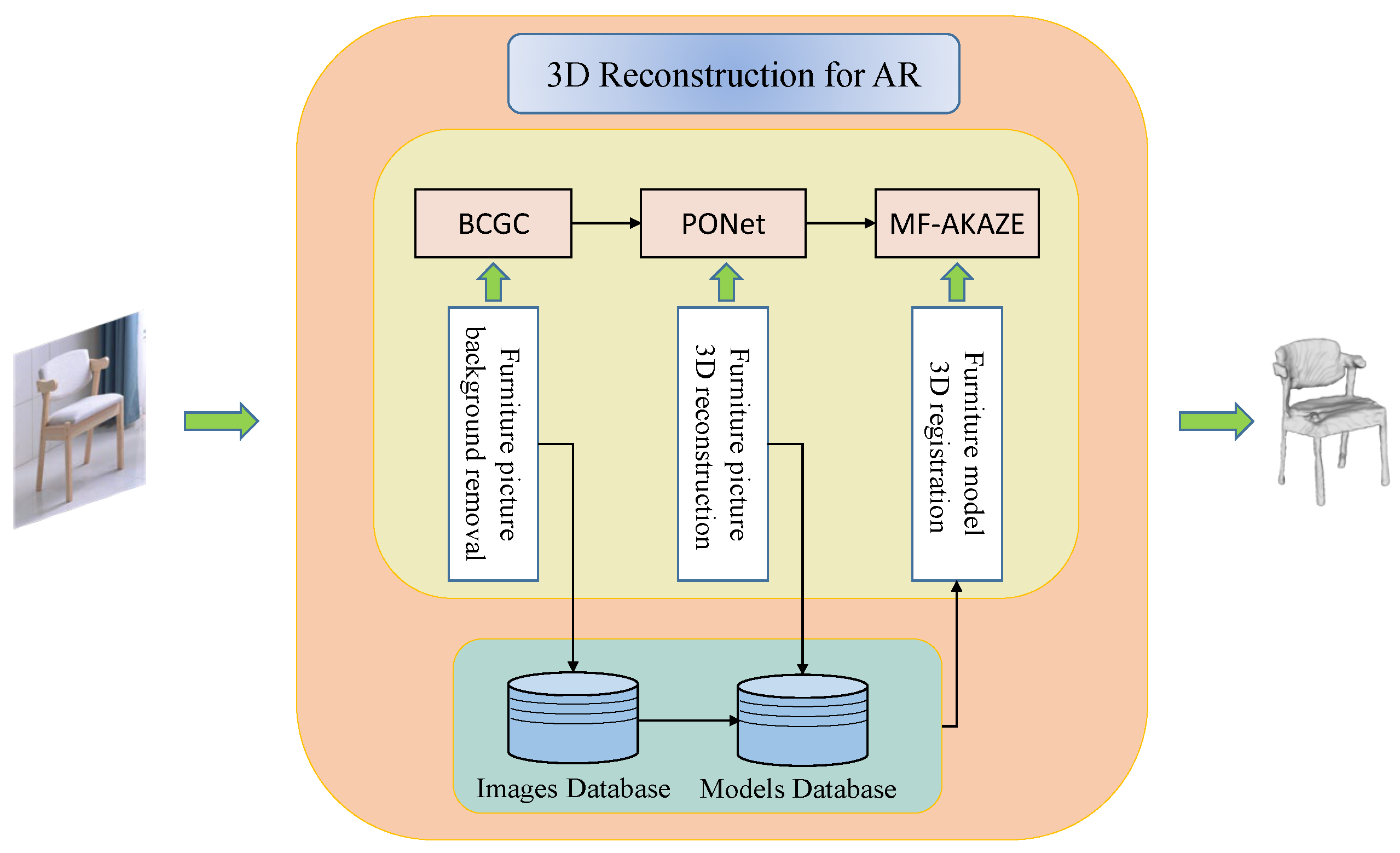
The main function of this system is to realize 3D reconstruction and AR 3D registration of furniture pictures containing complex backgrounds, so it mainly includes three steps: the first part is to extract and segment clean furniture pictures from complex backgrounds; the second part is to get 3D models of furniture by 3D reconstruction of furniture pictures without complex backgrounds; and the third part is to make improvements to feature matching in 3D registration of models to achieve AR viewing and interaction. The main framework of the system is shown in
Figure 1.
In order to realize the system to remove the background of furniture pictures containing complex backgrounds, this experiment proposes a BCGC algorithm in which the user draws a bounding rectangle to get the position of furniture instances in the image and extract them. In the reconstruction experiment, a PONet network is proposed to complete the probability calculation to realize 3D reconstruction based on pictures. In the 3D registration experiments, the traditional AKAZE feature detection algorithm is improved, and the MF-AKAZE algorithm is proposed for more accurate feature detection and matching to ensure that the 3D model of furniture can be registered to the real environment in a stable and accurate way to achieve AR interaction function.
3.2. BCGC Instance Segmentation
The Bayesian classifier (BC), as one of the most basic statistical classification methods, has an image segmentation extraction function. Image thresholding is a widely used segmentation technique that takes advantage of the difference in grayscale characteristics between the target region to be extracted from an image and its background, treats the image as a combination of two types of regions (target region and background region) with different grayscale levels, and selects a more reasonable threshold value to determine whether each pixel point in the image should belong to the target region or the background region to produce the corresponding binary image. The BC algorithm is able to segment the foreground and background where the instance is located, but the part of the hole contained inside the instance is not completely segmented, and further refinement of the segmentation is needed. GrabCut considers the global color distribution of background and foreground pixels (with local pixel similarity) for segmentation, so it has the ability to remove the internal pixels that do not belong to the object, and therefore uses the GrabCut algorithm once again segments the internal non-essential parts of the foreground with the foreground. The algorithm steps are shown in Algorithm 1.
| Algorithm 1 Step of BCGC |
Input: Image , Bounding box, N: maximum number of iterations, Pixel Threshold T.
Output: Image .
Procedure:
Step 1. Train an initial BC.
Step 2. BC algorithm distinguishes the foreground background according to GMM to get image .
Step 3. For each pixel , the background similarity is calculated by GMM.
Step 4. The image result is further obtained by refining the segmentation with GC algorithm.
Step 5. if else .
Step 6. If the segmentation result is unchanged or the current iteration times is larger than N, the algorithm is over.
Step 7. Or else re-train BC based on the segmentation result, then go to Step 2. |
The first step of the algorithm is to initialize the BC network. The posterior probability density function can be expressed as Equation (1).
where
denotes the feature vector of a pixel in the input image,
denotes the background,
denotes the foreground,
denotes the probability density function, and
denotes the posterior probability density function.
Therefore, the Bayesian classifier used to distinguish the target image will involve the determination of the prior probability function, as well as the probability density function, for distinguishing whether the pixel belongs to the foreground or background pixel. Since most of the pixels in the rectangular region should belong to the object being segmented in the determination of the initial value of the prior probability, it is sufficient to ensure that the value of
is greater than the value of
. In the determination of the probability density function, assuming that they are Gaussian mixture models (GMM), the following equations are available:
where
is the number of Gaussian components in the GMM,
represents the weight,
represents the mean, and
represents the Kth Gaussian component in the covariance matrix.
The above formula can be used to distinguish whether a pixel belongs inside or outside rectangular box boundaries. In our method, when segmenting objects with GrabCut, the initial training data for the background GMM is the bounding pixel because the bounding box must be outside the object, so the bounding pixel must belong to the background pixel, and the object occupies most of the area in the foreground box, so the median pixel in the foreground box is used as the foreground pixel to train the data. However, in order to also have the case that the median pixel does not belong to the foreground, so to reduce the error, the range pixel method is used: the middle pixel is the center of the circle, and the average pixel within the circle area of five pixel distances around the middle pixel is used as the foreground pixel. Finally, the expectation-maximizing EM algorithm is used to learn the initial parameters of the two GMMs.
For the resultant image segmented by the BC algorithm, the similarity of each pixel to the background is denoted as . From the previous section, we know that BC uses the GMM constructed for foreground and background to assign likelihood values to each pixel in the image, so the GMM of the background is used to estimate , which is finally normalized to a probability between 0 and 1. The GMM of the foreground in the GC refinement part is calculated as in the BC step, setting the threshold , if , then it is removed as a background pixel, and vice versa as a foreground instance pixel.
3.3. PONet 3D Shape Reconstruction
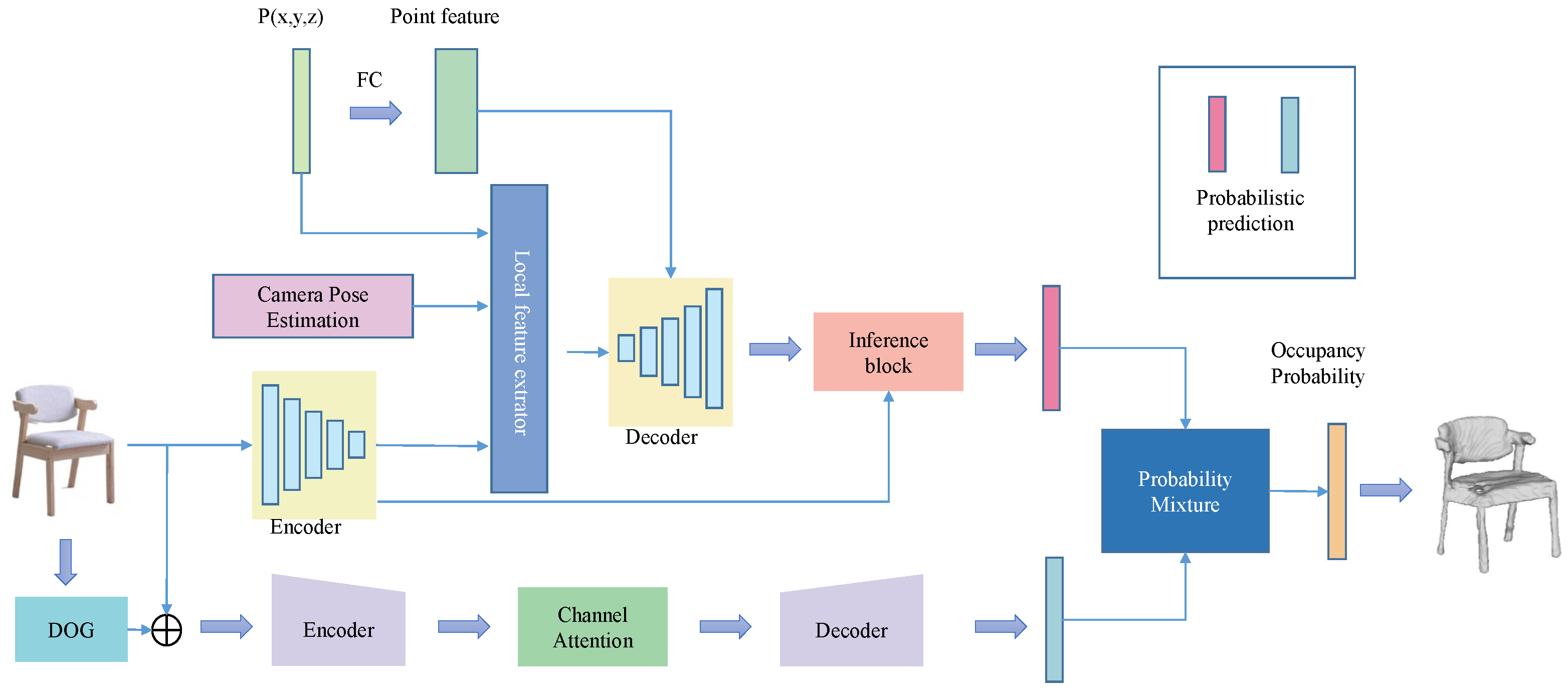
After extracting the furniture from the complex background segmentation, the goal is to reconstruct a 3D model of the given object. The inputs to the occupancy network ONet are images and 3D coordinates, and finally the probability of occupancy of the input points inside the object is output. Finally, the mesh model is generated based on the probability. In this study, the occupancy prediction network of PONet is proposed for the case of known camera information of input image acquisition, adding camera information to the original network, combining both local feature information and global feature information, adding detail reconstruction, and probability mixing using probability estimation of double branching, and finally outputting whether the position of the point is occupied or not to complete the reconstruction work. The reconstructed network structure is shown in
Figure 2.
The occupancy prediction network proposed in this study is based on camera information known to be used for the input image capture. That is, the input to the network is the image, the camera information, and the three-dimensional coordinates (points), and the output is whether the location of the point is occupied (probability). A function
with observation
as input, position P mapped to a real number as output, and camera information as
, the expression of the function of PONet is shown in Equation (4).
3.3.1. Encoder
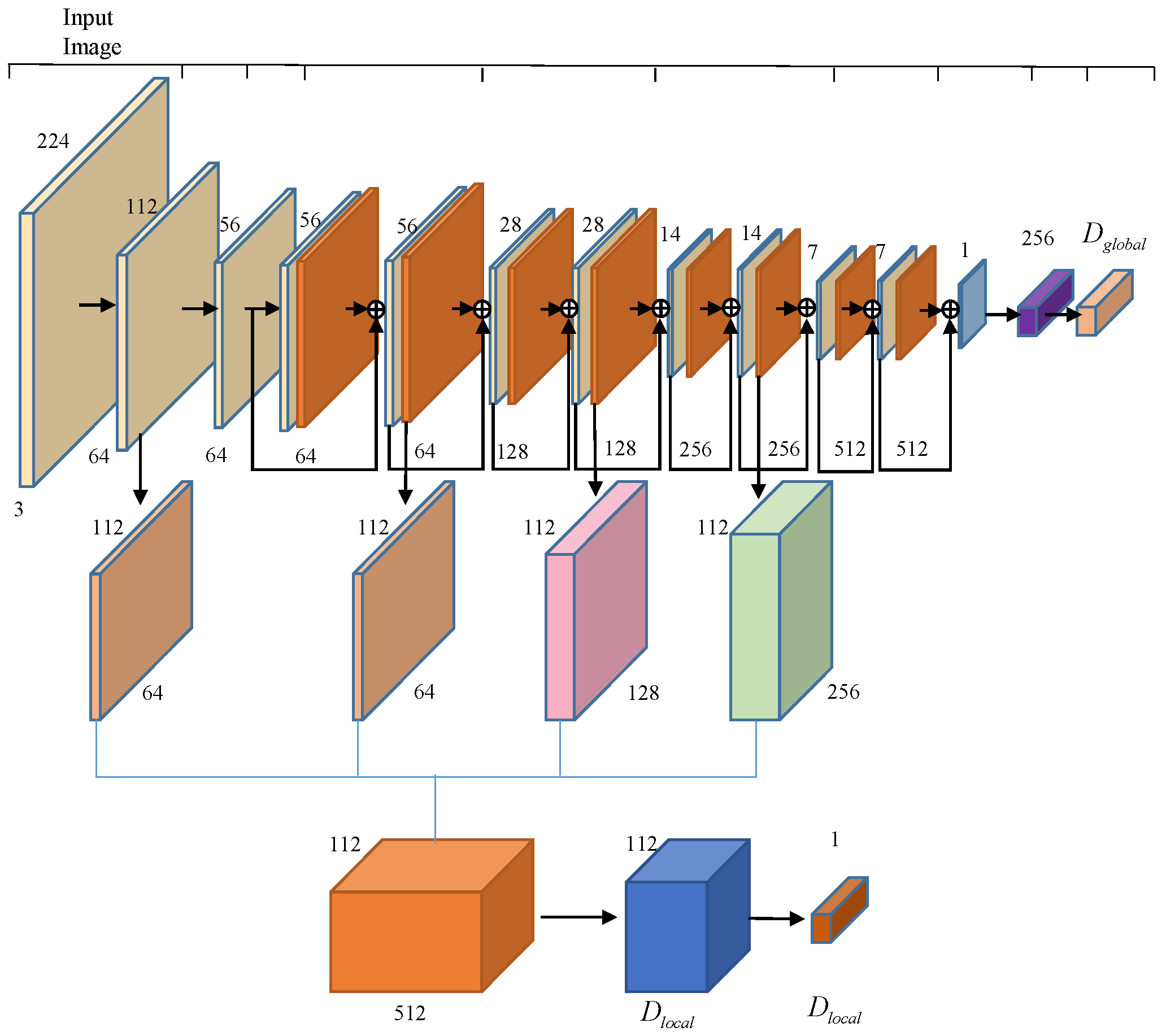
The encoder of the main branch uses a RestNet-fasion CNN network [
26], which completes the extraction of the global feature vector and local feature mapping from the input image. The encoder uses the RestNet-18 architecture and has an additional upsampling step to generate feature mapping, which is obtained from the fully connected layer. The outputs of the second, fourth, and sixth ResNet blocks are upsampled to 112 × 112 using bilinear differences and connected to the 112 × 112 feature map from the “Conv64” layer to form a 512-dimensional feature map, resulting in a 256-dimensional local feature region. The network structure is shown in
Figure 3.
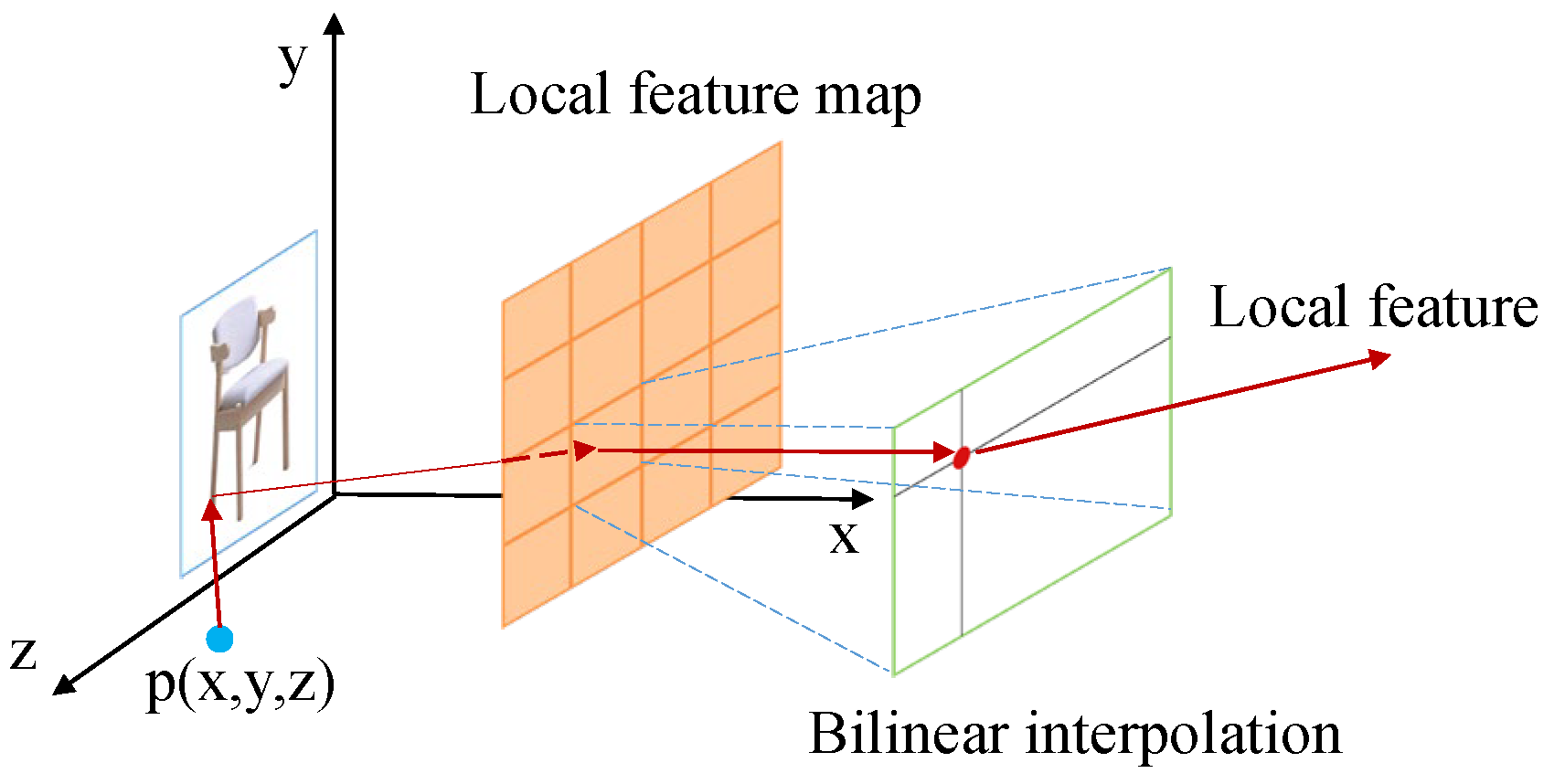
3.3.2. Local Feature Extractor
The local feature mapping obtained by the encoder can only roughly get the object detail information. If we want to get the fine object surface, then we also need to extract the regional feature mapping corresponding to the point position from the regional feature mapping. This paper adopts the PFP (Perceptual Feature Pooling) method proposed by Wang et al. [
27]: the input obtained camera information to project the 3D points onto the 2D image plane to obtain the corresponding positions of the points on the image, then shrink the fitted area, the feature values of the points on the feature mapping by bilinear interpolation, and finally complete the work of extracting point features. The local feature extractor process diagram is shown in
Figure 4.
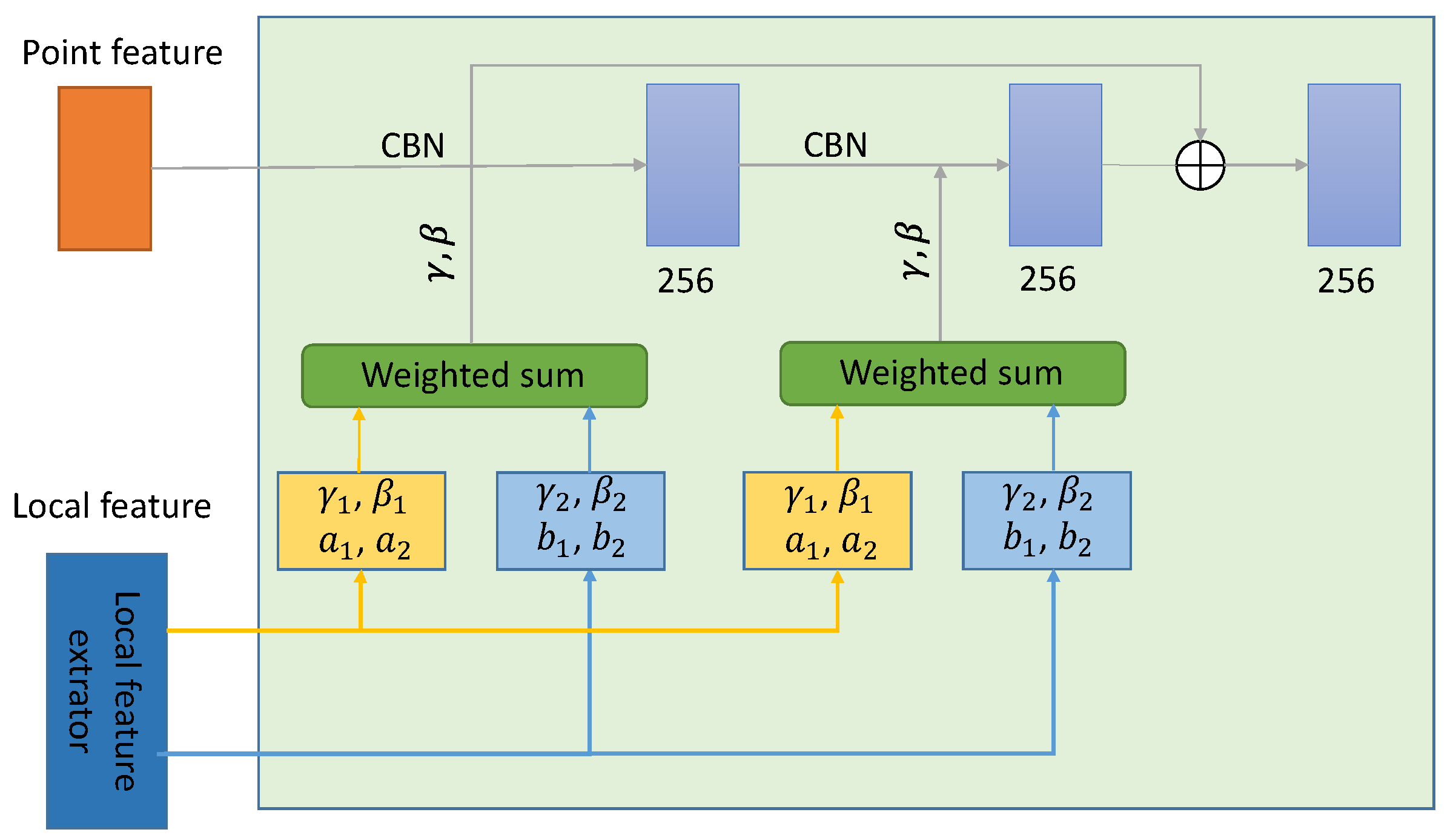
3.3.3. Decoder
The input of the decoder contains region features and point features. Firstly, the 3D points need to be scaled to 256 dimensions through the fully connected layer to obtain the point features, while the region features are obtained by feature extraction through the encoder. The decoder part receives the point feature information, and after the conditional configuration regularization (CBN), it is processed by the ReLu activation layer and the convolution layer to generate the final output of the decoder. The internal structure of the decoder is shown in
Figure 5.
In the original Onet paper, conditional batch normalization using parameters
γ and
β was able to restore the overall shape of the object, but it lacked certain details. To overcome this difficulty, multiple local features are used to infer the conditional normalization parameters when extracting local features. (
,
) and (
,
) in the above figure are inferred from multiple region features, and then the two inference results are weighted and summed to determine the final parameters
γ and
β. The weights
a1,
a2,
b1,
b2 are inferred using the wider receiving regions in the two regions of the region features to be inferred. The output of the decoder is the point features, and the input of the inference block is the global feature vector obtained at the encoder stage and the point features at the output of the decoder. The weight parameters in the decoder are satisfied.
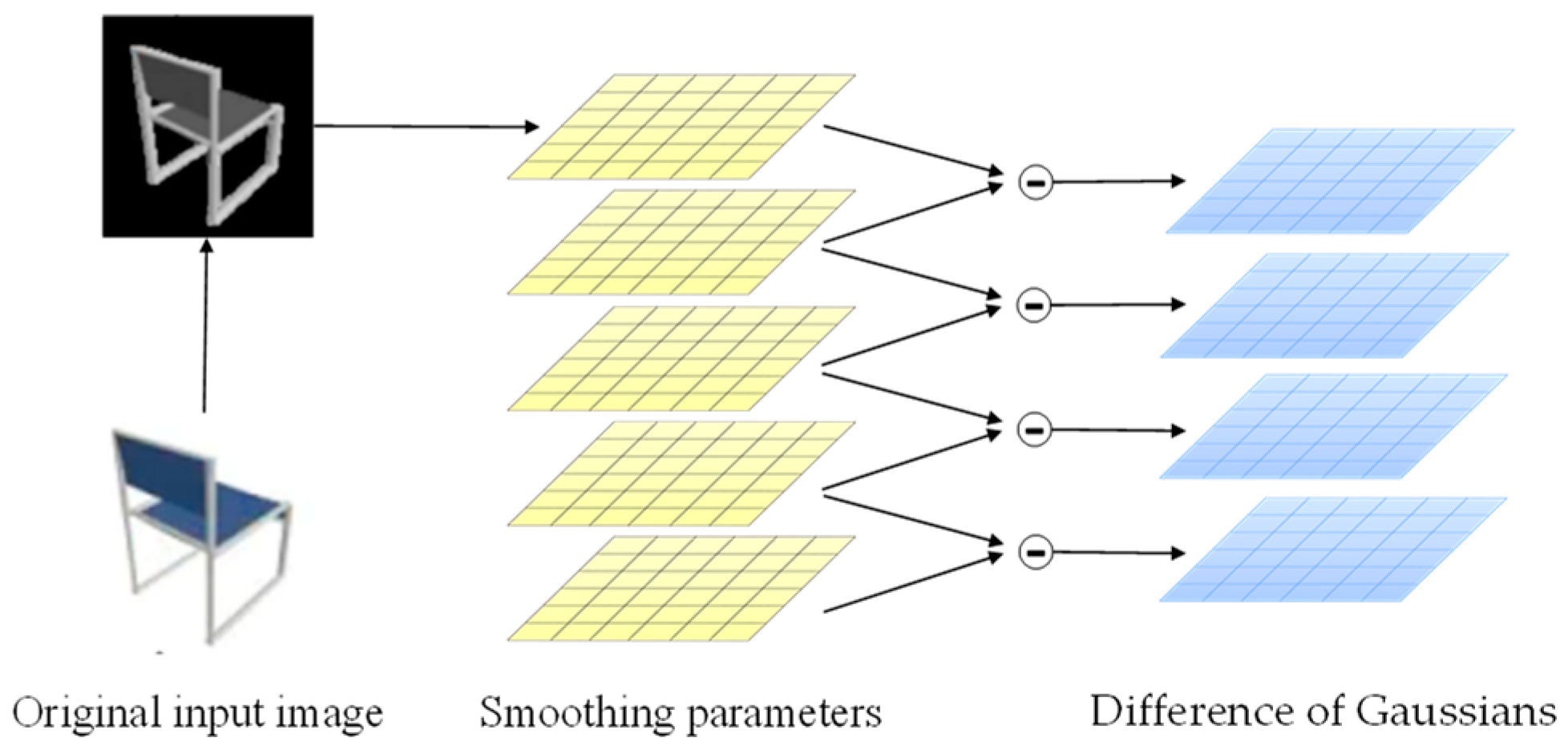
3.3.4. Side Branch
From Onet’s experimental results, it is clear that the ability of a single branch to learn shapes is limited and has some limitations. To better recover the 3D model of furniture based on the pictures and improve the generalization ability of the model, a side branch structure is added with reference to some advanced methods. First, Difference of Gaussians (DOG) [
28] is used to process the original input image to obtain the Gaussian difference map. This process can remove the high frequency noise components in the image, and can capture more corner point information features, so as to better learn the detail information and topology of the target object. The principle of DOG is shown in
Figure 6.
The original image is first converted to grayscale, and then three different Gaussian kernels are used to convolve the grayscale image to obtain blurred images with different Gaussian scales. The processed image is sent to the encoder again for extraction to obtain the side branch prediction probabilities. Convolution of the grayscale image is performed using the formula.
where
denotes the standard deviation of the
ith Gaussian kernel, d denotes the dimensionality of the output, and
f(
x,
y) denotes the input grayscale map, and the Gaussian filter results under two different parameters are subtracted to obtain the final DOG map.
The images after DoG processing retain the spatial information contained in the band between the two images, where A denotes the blur radius. The encoder in the side branch is directly used in the ResNet 18 structure, and the decoder part uses a fully connected neural network with 5 ResNet blocks.
3.3.5. Probability Mixer
The prediction probabilities of the two pairs of points are calculated by the main branch and the side branch, so the final prediction probabilities are obtained by fusing the prediction results based on the contributions of the main branch and the side branch. Therefore, all probabilities are integrated using a probabilistic mixer to obtain.
where
denotes the weight of that branch in the current target prediction,
denotes the prediction probability of the main branch,
denotes the prediction probability of the side branch, and
is the learned mapping function.
3.3.6. Loss Function
To learn the network parameters from the neural network
, by sampling random points in the 3D boundary volume of the object, i.e., for the
-th sample in the training batch, sampling
K points
, and then evaluating the small-batch loss function at these point locations.
where
B denotes the number of small batches,
denotes the main branch cross-entropy classification loss,
denotes the side branch cross-entropy classification loss,
denotes the main branch network parameters, while
denotes the side branch network parameters, and
denotes the ground truth.
3.4. MF-AKAZE Feature-Point Alignment
The traditional akaze algorithm detects the feature points after establishing the nonlinear scale space, uses the modified local difference binary descriptor M-LDB (modified local difference binary) to describe the feature points, and finally uses the violent matching algorithm to match the feature points. In this paper, the AKAZE algorithm is improved to obtain the MF-AKAZE algorithm. In the feature description stage, the algorithm uses FREAK (fast retina keypoint) to effectively describe the feature points, uses FLANN (fast library for approving nearest neighbors) to obtain the feature points for pre matching, and finally uses the improved RANSAC (random sample consensus) to further filter the matching results.
3.4.1. Feature Detection
In the detection of feature points, the AKAZE algorithm is used to find the Hessian local maxima method, which defines the comparison space as a cube with the center of 3 pixels, compares the square with the center of 3 pixels with the nearby pixels, and compares the 9 pixels at the same position in the previous scale when the maxima are the center points, and if they are still maxima at that time, then compares them with the 9 pixels inside the next scale. If the current point is the center point, then it is compared with 9 pixels in the next scale. If the current point is still an extreme point compared to the surrounding 27 pixels, then this pixel is defined as a feature point.
3.4.2. Feature Description
The traditional AKAZE algorithm to describe image features uses the M-LDB descriptor, which is a corresponding rotational transformation on the divided network cells, and the algorithm itself is computationally complex and poor in real time. In this paper, a binary FREAK descriptor with local invariant features is used to describe the detected feature points, and the structure of FREAK is referenced to the function of acquiring image perceptual domains in the human retina, and the image information is acquired by distributing regions. FREAK is used to describe a feature point denoted by F.
In the above equation, denotes the sensory domain pair, i.e., the location of the current sampling point; N is the dimension of the feature vector.
3.4.3. Feature Matching
To improve the matching efficiency in the feature point matching phase, the high-dimensional nearest neighbor FLANN algorithm is used in this paper instead of the AKAZE algorithm for BF violence matching.
The FLANN algorithm efficiently and quickly obtains the search type within a known data set according to the distribution characteristics and the required space resource consumption, and to find the nearest distance points in the feature point neighborhood based on the computed Euclidean distance, which is given by the following equation.
The D value is inversely proportional to the matching degree of feature points, where lower D means the closer the distance between the feature point pairs, i.e., the feature point pairs have higher matching.
3.4.4. Matching Filter
RANSAC has been widely used for matching screening work, but the algorithm can only reject a few wrong matching points, and it is difficult to screen and reject for more one-to-many matching cases. In order to improve the shortcomings of RANSAC, this paper proposes an improved RANSAC algorithm for multiple false feature point matching.
If the two feature points in the image can be matched accurately, then the single-response matrix can be expressed as:
The two corresponding feature points in the image are denoted by and , denotes the proportional relationship between the feature points. The ratio between multiple matching pairs should be consistent, and if there is an incorrect matching point pair, then the single-response matrix corresponding to the wrong matching point is not consistent with the single-response matrix corresponding to the correct matching. In this paper, three matching point pairs are selected to verify the single-response matrix correspondence according to this relationship, i.e., if the feature points in all selected matching points can correspond correctly, then the triangles formed by these three points have similarity and their single-response matrices remain consistent, so the three point pairs with similar triangles can be searched for among all matching point pairs for proportional verification.
The specific steps are: firstly, the feature points are obtained by the AKAZE feature detection algorithm, and then the image is characterized by the FREAK algorithm; secondly, the matching points with multiple matching points in a special rule pair are eliminated; then one of the matching points is arbitrarily selected from the eliminated matching points as L and R, and the feature points of the domain are found by using the k-d tree as
,
,and
,
, and these three points are connected to form a triangle and compared. These three points are connected to form a triangle and compared to determine whether any two interior angles are then within a certain threshold range, and satisfying a certain range proves that the two triangles are similar, and this threshold range is specified as
d; then we have:
where
and
is any two interior angles of the triangle, and the value of d is taken as 0.06. By this method, all the filtering points are detected in a continuous cycle, and finally, the matching pairs with similar triangle features are saved. The at least 3 pairs of correctly matched feature points can be calculated by Equation (13) to the single-response matrix
H. Filtering is performed by the ratio of the single-response matrix. The matching points less than the threshold
are saved by calculating the Euclidean distance, and the distance function
is calculated as:
where ‖
‖ is the Euclidean distance between two matching feature points, and the two corresponding feature points in the image are used as
x and
x’. If one of the matching points
and
, has a relationship of
, then they are considered as a correct matching pair; otherwise, they are rejected, where
takes the value of 1.6.












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}



































