
TIMo—A Dataset for Indoor Building Monitoring with a Time-of-Flight Camera

 , ,
, ,  ,
, 
Abstract
:1. Introduction
2. Related Work
2.1. Datasets
2.2. Anomaly Detection
2.3. Person Detection

{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Dataset | Year | # Sequences (# Frames) | Data Modalities | Camera Hardware | Annotations | Environment |
|---|---|---|---|---|---|---|
| TIMo Anomaly Detection (ours) | 2021 | 1588 (612 K) | IR, Depth | MS Kinect Azure | Anomaly Frames | Indoor |
| TIMo Person Detection (ours) | 2021 | 243 (23.6 K) | IR, Depth | MS Kinect Azure | 2D/3D Object BBox, 2D Segm. Masks | Indoor |
| ShanghaiTech Campus [19] | 2018 | 437 (317 K) | RGB | RGB Camera | Anomaly Frames, Anomaly Masks | Outdoor |
| UTD-MHAD [16] | 2015 | 861 (45 K) | RGB, Depth, 3D Joints, ID | MS Kinect v1 | Action Classes | Indoor |
| NTU-RGB+D 120 [18] | 2019 | 114 K (4 M) | RGB, Depth, 3D Joints, Inertia | MS Kinect v2 | Action Classes | Indoor |
| UCF-Crime [20] | 2018 | 1900 (13.8 M) | RGB | RGB Camera | Anomaly Frames | Indoor + Outdoor |
| TiCAM (Real) [12] | 2021 | 533 (6.7 K/118 K) | RGB, IR, Depth | MS Kinect Azure | 2D/3D Object BBox, 2D Segm. Masks Action Classes | Car Cabin |
| DAD [28] | 2020 | 386 (2.1 M) | IR, Depth | CamBoard pico flexx | Anomaly Frames | Car Cabin |
| CUHK Avenue [37] | 2013 | 37 (31 K) | RGB | RGB Camera | Anomaly Frames, Anomaly BBoxes | Outdoor |
| UCSD Ped 1 + 2 [38] | 2010 | 70 + 28 (14 K + 4.6 K) | Grayscale | Grayscale Camera | Anomaly Frames, partly Anomaly Masks | Outdoor |
| Subway Exit + Entrance [23] | 2008 | 1 + 1 (137 K + 72 K) | Grayscale | Grayscale Camera | Anomaly Frames, rough Anomaly Locations | Subway Station |
| IITB-Corridor [39] | 2020 | 368 (484 K) | RGB | RGB Camera | Anomaly Frames | Outdoor (Corridor) |
3. TIMo Dataset
3.1. Data Modalities
3.2. Setup
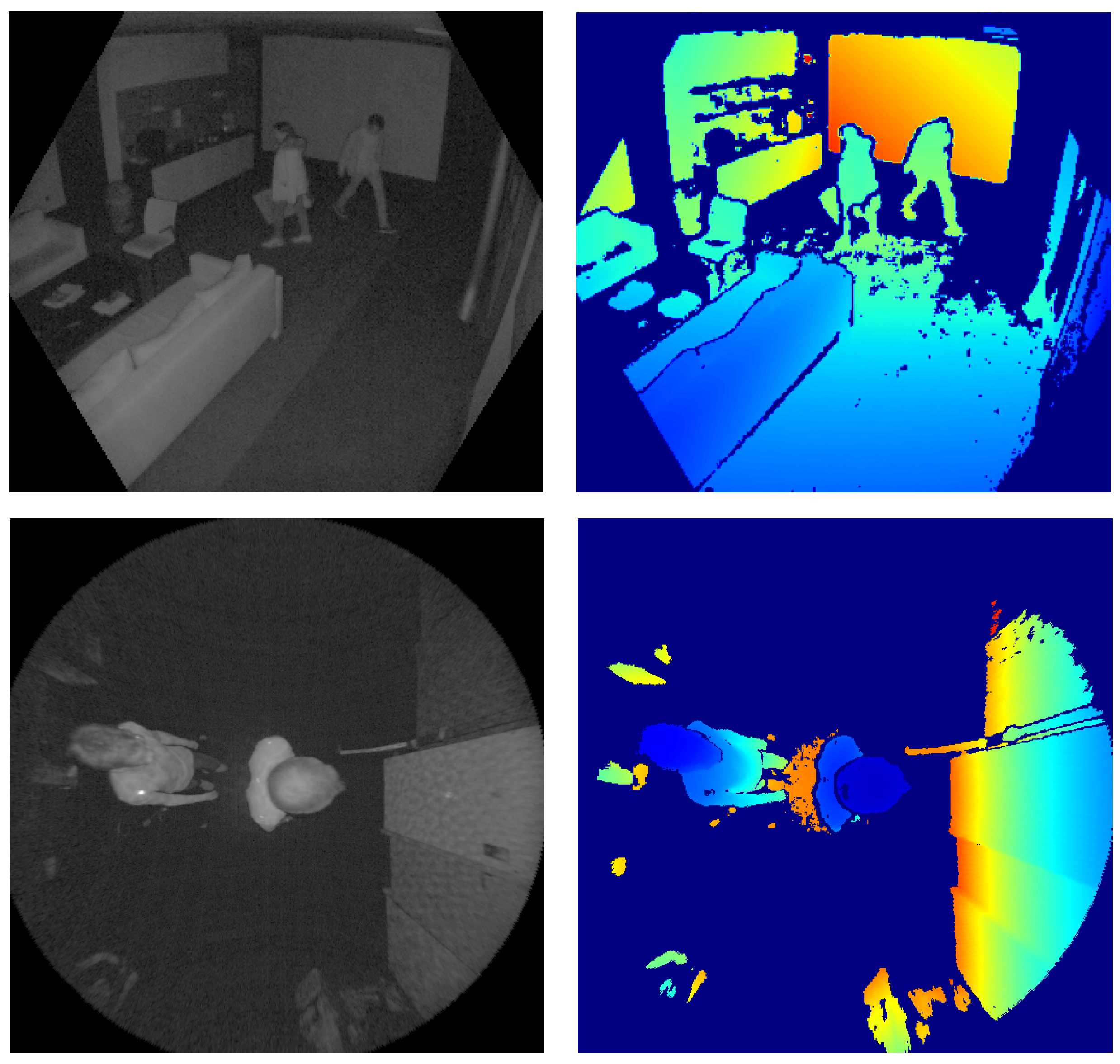
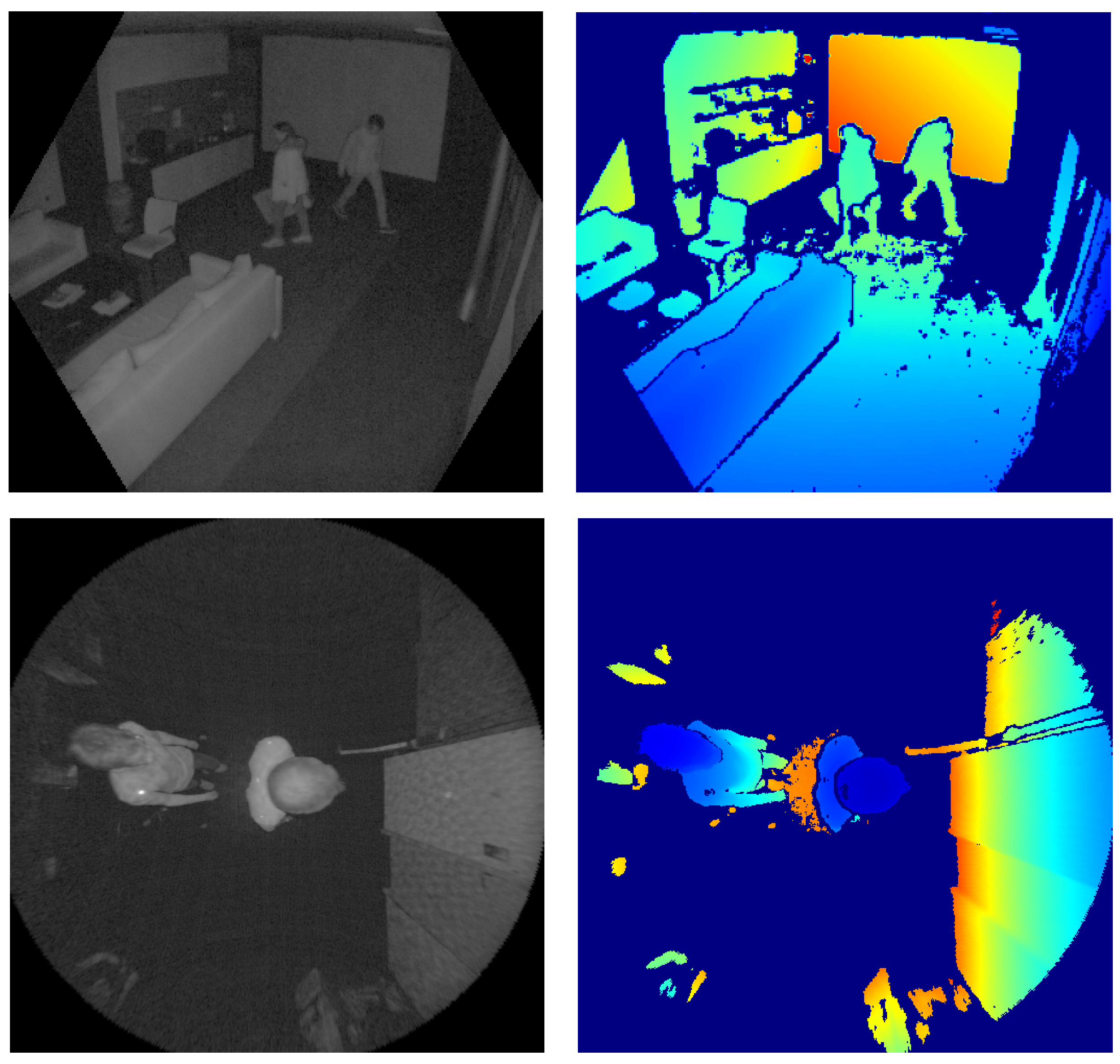
3.2.1. Top-Down View
3.2.2. Tilted-View
3.3. Acquisition
3.4. Post-Processing
3.5. Data Format
3.6. Annotations
3.6.1. Anomaly Annotations
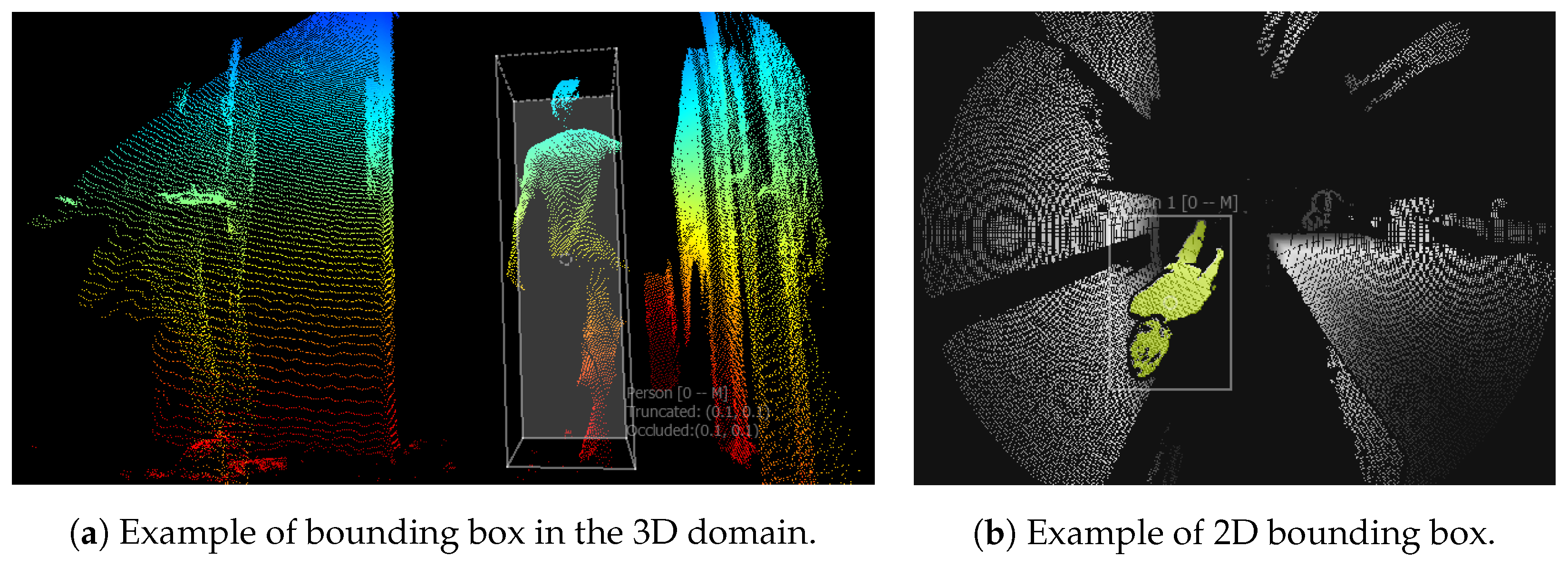
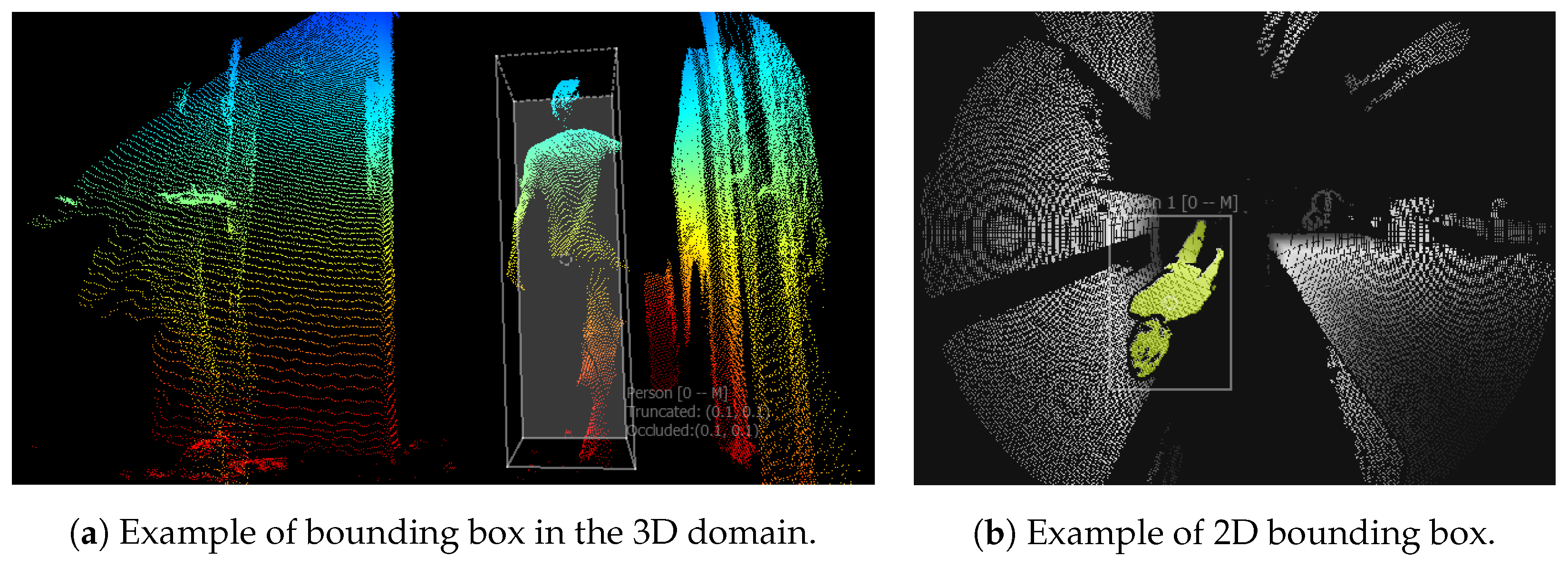
3.6.2. Person and Object Annotations
- Two-dimensional (2D) segmentation masks per frame, saved as 8-bit PNG images. Pixel values correspond to class and instance IDs respectively;
- Two dimensional (2D) bounding boxes per annotation, described as pixel coordinates of rectangular around the annotated object. This data is presented in corresponding CSV in a form of , where and are the coordinates of upper left and lower right corner of the bounding box;
- Three-dimensional (3D) bounding boxes per annotation, presented in corresponding CSV as a box center and its dimensions in the world coordinate system.
3.7. Data Statistics
4. Baseline Results
4.1. Anomaly Detection Baseline
4.2. Person Detection Baseline
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Smart Buildings. Available online: https://iee-sensing.com/en/building-management-security.html (accessed on 21 January 2022).
- Tölgyessy, M.; Dekan, M.; Chovanec, L.; Hubinskỳ, P. Evaluation of the Azure Kinect and its comparison to Kinect v1 and Kinect v2. Sensors 2021, 21, 413. [Google Scholar] [CrossRef] [PubMed]
- Tubert, C.; Mellot, P.; Desprez, Y.; Mas, C.; Authié, A.; Simony, L.; Bochet, G.; Drouard, S.; Teyssier, J.; Miclo, D.; et al. 4.6 μm Low Power Indirect Time-of-Flight Pixel Achieving 88.5% Demodulation Contrast at 200 MHz for 0.54 MPix Depth Camera. In Proceedings of the 47th ESSCIRC 2021—European Solid State Circuits Conference, ESSCIR 2021, Grenoble, France, 13–22 September 2021; pp. 135–138. [Google Scholar] [CrossRef]
- Analog Devices 3D Time of Flight (ToF). Available online: https://www.analog.com/en/applications/technology/3d-time-of-flight.html (accessed on 21 January 2022).
- Sony’s Latest Image Sensors. Available online: https://www.sony.com/en/SonyInfo/technology/stories/imagesensor7tech/ (accessed on 21 January 2022).
- Zhang, Z. Microsoft Kinect Sensor and Its Effect. IEEE Multim. 2012, 19, 4–10. [Google Scholar] [CrossRef] [Green Version]
- Keselman, L.; Woodfill, J.I.; Grunnet-Jepsen, A.; Bhowmik, A. Intel(R) RealSense(TM) Stereoscopic Depth Cameras. In Proceedings of the 2017 IEEE Conference on Computer Vision and Pattern Recognition Workshops, CVPR Workshops 2017, Honolulu, HI, USA, 21–26 July 2017; pp. 1267–1276. [Google Scholar] [CrossRef]
- Gonzalez-Jorge, H.; Riveiro, B.; Vazquez-Fernandez, E.; Martínez-Sánchez, J.; Arias, P. Metrological evaluation of Microsoft Kinect and Asus Xtion sensors. Measurement 2013, 46, 1800–1806. [Google Scholar] [CrossRef]
- Wang, P.; Li, W.; Ogunbona, P.; Wan, J.; Escalera, S. RGB-D-based human motion recognition with deep learning: A survey. Comput. Vis. Image Underst. 2018, 171, 118–139. [Google Scholar] [CrossRef] [Green Version]
- Wang, P.; Li, W.; Liu, S.; Gao, Z.; Tang, C.; Ogunbona, P. Large-scale isolated gesture recognition using convolutional neural networks. In Proceedings of the 2016 23rd International Conference on Pattern Recognition (ICPR), Cancun, Mexico, 4–8 December 2016; pp. 7–12. [Google Scholar]
- Wasenmüller, O.; Stricker, D. Comparison of Kinect v1 and v2 Depth Images in Terms of Accuracy and Precision. In Proceedings of the Computer Vision—ACCV 2016 Workshops—ACCV 2016 International Workshops, Taipei, Taiwan, 20–24 November 2016; Revised Selected Papers, Part II. pp. 34–45. [Google Scholar] [CrossRef]
- Katrolia, J.S.; Mirbach, B.; El-Sherif, A.; Feld, H.; Rambach, J.; Stricker, D. TICaM: A Time-of-flight In-car Cabin Monitoring Dataset. arXiv 2021, arXiv:2103.11719. [Google Scholar]
- Firman, M. RGBD Datasets: Past, Present and Future. In Proceedings of the 2016 IEEE Conference on Computer Vision and Pattern Recognition Workshops, CVPR Workshops 2016, Las Vegas, NV, USA, 26 June–1 July 2016; pp. 661–673. [Google Scholar] [CrossRef] [Green Version]
- Armeni, I.; Sax, A.; Zamir, A.R.; Savarese, S. Joint 2D-3D-Semantic Data for Indoor Scene Understanding. arXiv 2017, arXiv:cs.CV/1702.01105. [Google Scholar]
- Dai, A.; Chang, A.X.; Savva, M.; Halber, M.; Funkhouser, T.A.; Nießner, M. ScanNet: Richly-Annotated 3D Reconstructions of Indoor Scenes. In Proceedings of the 2017 IEEE Conference on Computer Vision and Pattern Recognition, CVPR 2017, Honolulu, HI, USA, 21–26 July 2017; pp. 2432–2443. [Google Scholar] [CrossRef] [Green Version]
- Chen, C.; Jafari, R.; Kehtarnavaz, N. UTD-MHAD: A multimodal dataset for human action recognition utilizing a depth camera and a wearable inertial sensor. In Proceedings of the 2015 IEEE International Conference on Image Processing, ICIP 2015, Quebec City, QC, Canada, 27–30 September 2015; pp. 168–172. [Google Scholar] [CrossRef]
- Shahroudy, A.; Liu, J.; Ng, T.; Wang, G. NTU RGB+D: A Large Scale Dataset for 3D Human Activity Analysis. In Proceedings of the 2016 IEEE Conference on Computer Vision and Pattern Recognition, CVPR 2016, Las Vegas, NV, USA, 27–30 June 2016; pp. 1010–1019. [Google Scholar] [CrossRef] [Green Version]
- Liu, J.; Shahroudy, A.; Perez, M.; Wang, G.; Duan, L.; Kot, A.C. NTU RGB+D 120: A Large-Scale Benchmark for 3D Human Activity Understanding. IEEE Trans. Pattern Anal. Mach. Intell. 2020, 42, 2684–2701. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Liu, W.; Luo, W.; Lian, D.; Gao, S. Future Frame Prediction for Anomaly Detection—A New Baseline. In Proceedings of the 2018 IEEE Conference on Computer Vision and Pattern Recognition, CVPR 2018, Salt Lake City, UT, USA, 18–22 June 2018; pp. 6536–6545. [Google Scholar] [CrossRef] [Green Version]
- Sultani, W.; Chen, C.; Shah, M. Real-World Anomaly Detection in Surveillance Videos. In Proceedings of the 2018 IEEE Conference on Computer Vision and Pattern Recognition, CVPR 2018, Salt Lake City, UT, USA, 18–22 June 2018; pp. 6479–6488. [Google Scholar] [CrossRef] [Green Version]
- Aggarwal, C.C. Outlier Analysis; Springer: New York, NY, USA, 2013. [Google Scholar] [CrossRef]
- Oluwatoyin, P.P.; Wang, K. Video-Based Abnormal Human Behavior Recognition—A Review. IEEE Trans. Syst. Man Cybern. Part C 2012, 42, 865–878. [Google Scholar] [CrossRef]
- Adam, A.; Rivlin, E.; Shimshoni, I.; Reinitz, D. Robust Real-Time Unusual Event Detection using Multiple Fixed-Location Monitors. IEEE Trans. Pattern Anal. Mach. Intell. 2008, 30, 555–560. [Google Scholar] [CrossRef] [PubMed]
- Pang, G.; Shen, C.; Cao, L.; van den Hengel, A. Deep Learning for Anomaly Detection: A Review. ACM Comput. Surv. 2021, 54, 1–38. [Google Scholar] [CrossRef]
- Nayak, R.; Pati, U.C.; Das, S.K. A comprehensive review on deep learning-based methods for video anomaly detection. Image Vis. Comput. 2021, 106, 104078. [Google Scholar] [CrossRef]
- Kiran, B.R.; Thomas, D.M.; Parakkal, R. An Overview of Deep Learning Based Methods for Unsupervised and Semi-Supervised Anomaly Detection in Videos. J. Imaging 2018, 4, 36. [Google Scholar] [CrossRef] [Green Version]
- Hasan, M.; Choi, J.; Neumann, J.; Roy-Chowdhury, A.K.; Davis, L.S. Learning Temporal Regularity in Video Sequences. In Proceedings of the 2016 IEEE Conference on Computer Vision and Pattern Recognition, CVPR 2016, Las Vegas, NV, USA, 27–30 June 2016; pp. 733–742. [Google Scholar] [CrossRef] [Green Version]
- Köpüklü, O.; Zheng, J.; Xu, H.; Rigoll, G. Driver Anomaly Detection: A Dataset and Contrastive Learning Approach. In Proceedings of the IEEE Winter Conference on Applications of Computer Vision, WACV 2021, Waikoloa, HI, USA, 3–8 January 2021; pp. 91–100. [Google Scholar] [CrossRef]
- Tan, F.; Xia, Z.; Ma, Y.; Feng, X. 3D Sensor Based Pedestrian Detection by Integrating Improved HHA Encoding and Two-Branch Feature Fusion. Remote. Sens. 2022, 14, 645. [Google Scholar] [CrossRef]
- Gupta, S.; Girshick, R.; Arbeláez, P.; Malik, J. Learning rich features from RGB-D images for object detection and segmentation. In Proceedings of the European conference on computer vision, Zurich, Switzerland, 6–12 September 2014; pp. 345–360. [Google Scholar]
- Mitzel, D.; Leibe, B. Close-range human detection for head-mounted cameras. In Proceedings of the British Machine Vision Conference (BMVC), Surrey, UK, 3–7 September 2012. [Google Scholar]
- Choi, B.; Meriçli, Ç.; Biswas, J.; Veloso, M.M. Fast human detection for indoor mobile robots using depth images. In Proceedings of the 2013 IEEE International Conference on Robotics and Automation, Karlsruhe, Germany, 6–10 May 2013; pp. 1108–1113. [Google Scholar] [CrossRef] [Green Version]
- Xia, L.; Chen, C.C.; Aggarwal, J.K. Human detection using depth information by kinect. In Proceedings of the CVPR 2011 workshops, Colorado Springs, CO, USA, 20–25 June 2011; pp. 15–22. [Google Scholar]
- Canny, J. A computational approach to edge detection. IEEE Trans. Pattern Anal. Mach. Intell. 1986, 8, 679–698. [Google Scholar] [CrossRef] [PubMed]
- Zhou, C.; Ren, D.; Zhang, X.; Yu, C.; Ju, L. Human Position Detection Based on Depth Camera Image Information in Mechanical Safety. Adv. Math. Phys. 2022, 2022, 917064. [Google Scholar] [CrossRef]
- Wetzel, J.; Zeitvogel, S.; Laubenheimer, A.; Heizmann, M. Towards global people detection and tracking using multiple depth sensors. In Proceedings of the 2018 International Symposium on Electronics and Telecommunications (ISETC), Timisoara, Romania, 8–9 November 2018; pp. 1–4. [Google Scholar]
- Lu, C.; Shi, J.; Jia, J. Abnormal Event Detection at 150 FPS in MATLAB. In Proceedings of the IEEE International Conference on Computer Vision, ICCV 2013, Sydney, Australia, 1–8 December 2013; pp. 2720–2727. [Google Scholar] [CrossRef]
- Mahadevan, V.; Li, W.; Bhalodia, V.; Vasconcelos, N. Anomaly detection in crowded scenes. In Proceedings of the The Twenty-Third IEEE Conference on Computer Vision and Pattern Recognition, CVPR 2010, San Francisco, CA, USA, 13–18 June 2010; pp. 1975–1981. [Google Scholar] [CrossRef]
- Rodrigues, R.; Bhargava, N.; Velmurugan, R.; Chaudhuri, S. Multi-timescale Trajectory Prediction for Abnormal Human Activity Detection. In Proceedings of the IEEE Winter Conference on Applications of Computer Vision, WACV 2020, Snowmass Village, CO, USA, 1–5 March 2020; pp. 2615–2623. [Google Scholar] [CrossRef]
- Stumpf, D.; Krauß, S.; Reis, G.; Wasenmüller, O.; Stricker, D. SALT: A Semi-automatic Labeling Tool for RGB-D Video Sequences. In Proceedings of the 16th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications, VISIGRAPP 2021, Volume 4: VISAPP, Online Streaming, 8–10 February 2021; pp. 595–603. [Google Scholar] [CrossRef]
- Shi, X.; Chen, Z.; Wang, H.; Yeung, D.; Wong, W.; Woo, W. Convolutional LSTM Network: A Machine Learning Approach for Precipitation Nowcasting. In Proceedings of the Advances in Neural Information Processing Systems 28: Annual Conference on Neural Information Processing Systems 2015, Montreal, QC, Canada, 7–12 December 2015; pp. 802–810. [Google Scholar]
- He, K.; Gkioxari, G.; Dollár, P.; Girshick, R.B. Mask R-CNN. In Proceedings of the IEEE International Conference on Computer Vision, ICCV 2017, Venice, Italy, 22–29 October 2017; pp. 2980–2988. [Google Scholar] [CrossRef]
- Bolya, D.; Zhou, C.; Xiao, F.; Lee, Y.J. YOLACT: Real-Time Instance Segmentation. In Proceedings of the 2019 IEEE/CVF International Conference on Computer Vision, ICCV 2019, Seoul, Korea, 27 October–2 November 2019; pp. 9156–9165. [Google Scholar] [CrossRef] [Green Version]


| TIMo Anomaly Dataset–Train Split | ||||||||
|---|---|---|---|---|---|---|---|---|
| Configuration | # Sequences | # Frames | Unique Choreographies | |||||
| Normal | Anomalous | Total | Normal | Anomalous | Total | Normal | Anomalous | |
| Tilted View | 285 | 0 | 285 | 185,620 | 0 | 185,620 | 31 | 0 |
| Top-down View | 624 | 0 | 624 | 180,359 | 0 | 180,359 | 19 | 0 |
| Total | 909 | 0 | 909 | 365,979 | 0 | 365,979 | 36 | 0 |
| TIMo Anomaly Dataset–Test Split | ||||||||
| Configuration | # Sequences | # Frames | Unique Choreographies | |||||
| Normal | Anomalous | Total | Normal | Anomalous | Total | Normal | Anomalous | |
| Tilted View | 31 | 151 | 182 | 66,508 | 25,617 | 92,125 | 29 | 20 |
| Top-down View | 79 | 418 | 497 | 104,165 | 49,528 | 153,693 | 18 | 12 |
| Total | 110 | 569 | 679 | 170,673 | 75,145 | 245,818 | 34 | 22 |
| TIMo Person Detection Dataset | |||
|---|---|---|---|
| Data Type | Sequences | Frames | Annotations |
| Training | 125 | 6415 | 8501 |
| Complex Training | 34 | 7675 | 8186 |
| Total | 159 | 14,090 | 16,687 |
| Testing | 72 | 5089 | 6129 |
| Complex Testing | 12 | 3533 | 4971 |
| Total | 84 | 8622 | 11,000 |
| Anomaly Detection Dataset | ||
|---|---|---|
| Dataset Part | CAE | ConvLSTM |
| Tilted View | 66.4% | 62.8% |
| Top-down View | 56.4% | 62.2% |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Schneider, P.; Anisimov, Y.; Islam, R.; Mirbach, B.; Rambach, J.; Stricker, D.; Grandidier, F. TIMo—A Dataset for Indoor Building Monitoring with a Time-of-Flight Camera. Sensors 2022, 22, 3992. https://doi.org/10.3390/s22113992
Schneider P, Anisimov Y, Islam R, Mirbach B, Rambach J, Stricker D, Grandidier F. TIMo—A Dataset for Indoor Building Monitoring with a Time-of-Flight Camera. Sensors. 2022; 22(11):3992. https://doi.org/10.3390/s22113992
Chicago/Turabian StyleSchneider, Pascal, Yuriy Anisimov, Raisul Islam, Bruno Mirbach, Jason Rambach, Didier Stricker, and Frédéric Grandidier. 2022. "TIMo—A Dataset for Indoor Building Monitoring with a Time-of-Flight Camera" Sensors 22, no. 11: 3992. https://doi.org/10.3390/s22113992
APA StyleSchneider, P., Anisimov, Y., Islam, R., Mirbach, B., Rambach, J., Stricker, D., & Grandidier, F. (2022). TIMo—A Dataset for Indoor Building Monitoring with a Time-of-Flight Camera. Sensors, 22(11), 3992. https://doi.org/10.3390/s22113992