
A Real-Time GNSS-R System for Monitoring Sea Surface Wind Speed and Significant Wave Height

 , , and
, , and
Abstract
:1. Introduction
2. Requirements
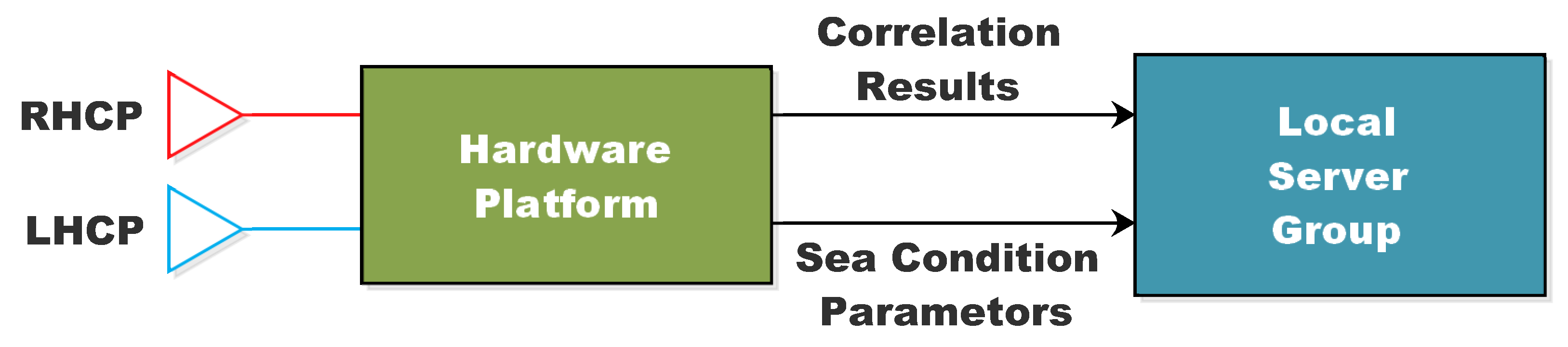
3. Prototype Design
- the hardware platform;
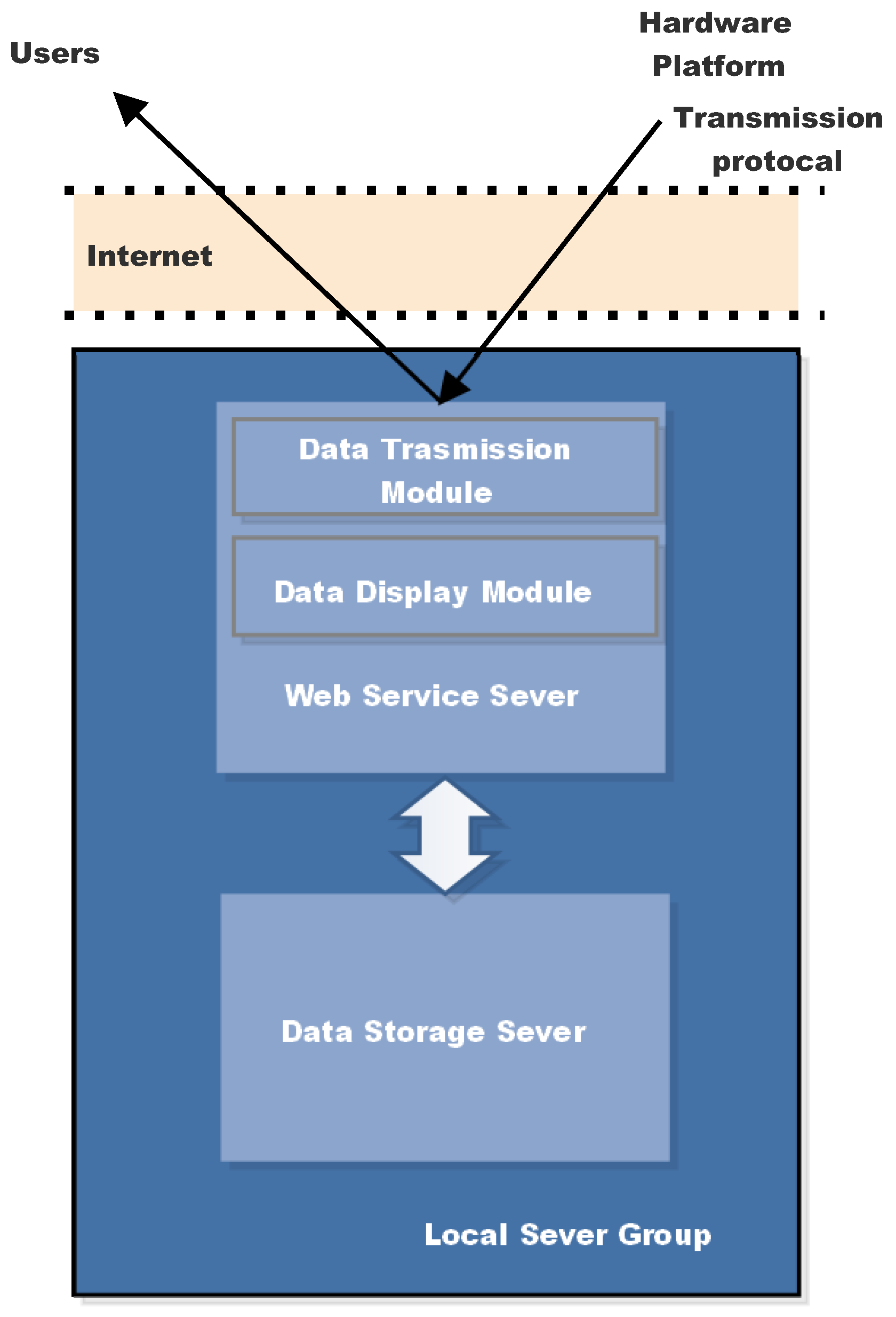
- the local server group.
3.1. Hardware Components
- the GNSS antennas;
- the commercial off-the-shelf (COTS) RF front-ends (FEs);
- the Field Program mable Gate Array (FPGA) stage;
- the digital signal processing (DSP) stage;
- the Raspberry Pi;
- the COTS communication module.
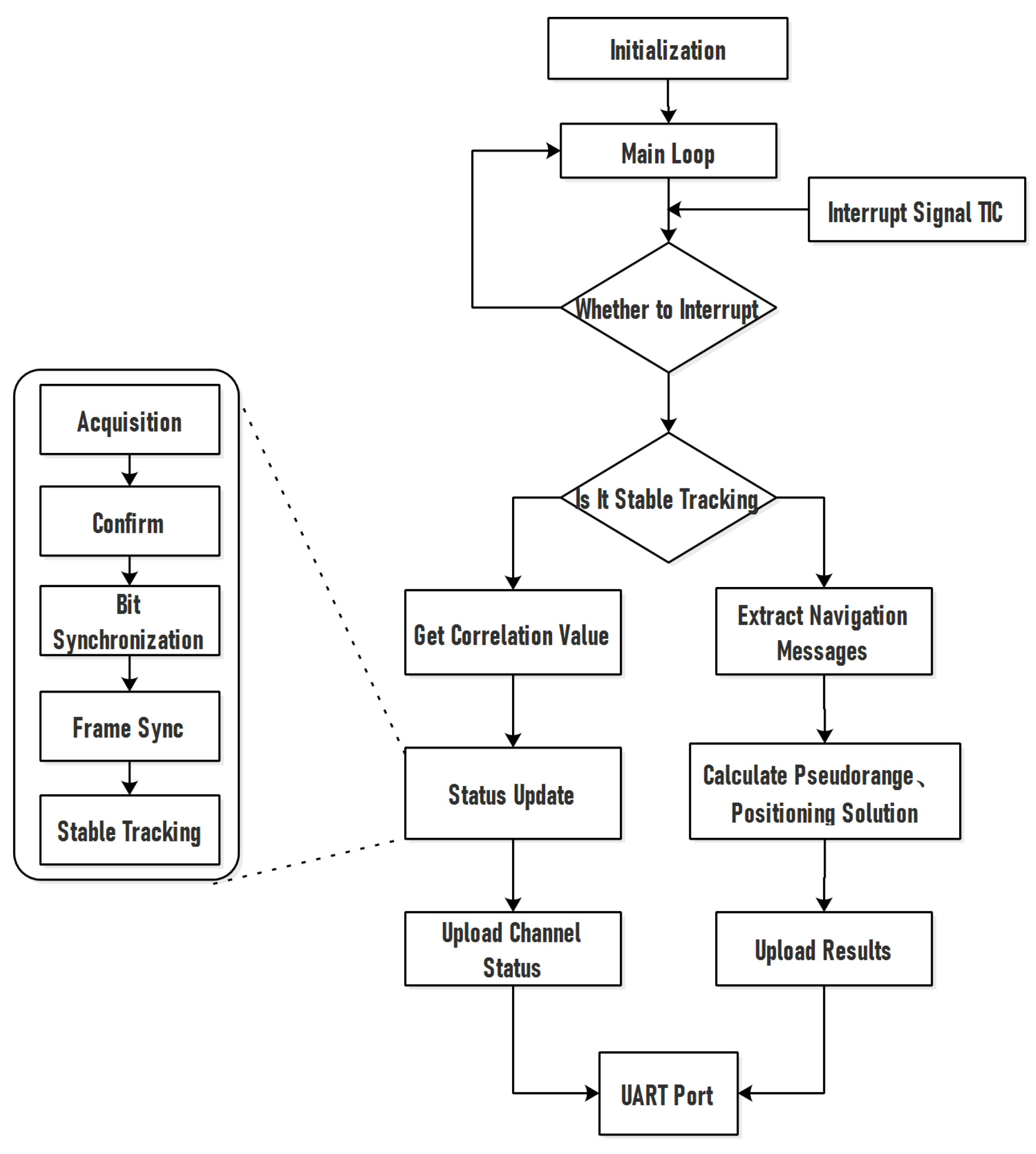
- Status updating
- Positioning
- (1)
- A four-channel radio frequency front-end module that can gather direct and reflected signals from Beidou and GPS systems.
- (2)
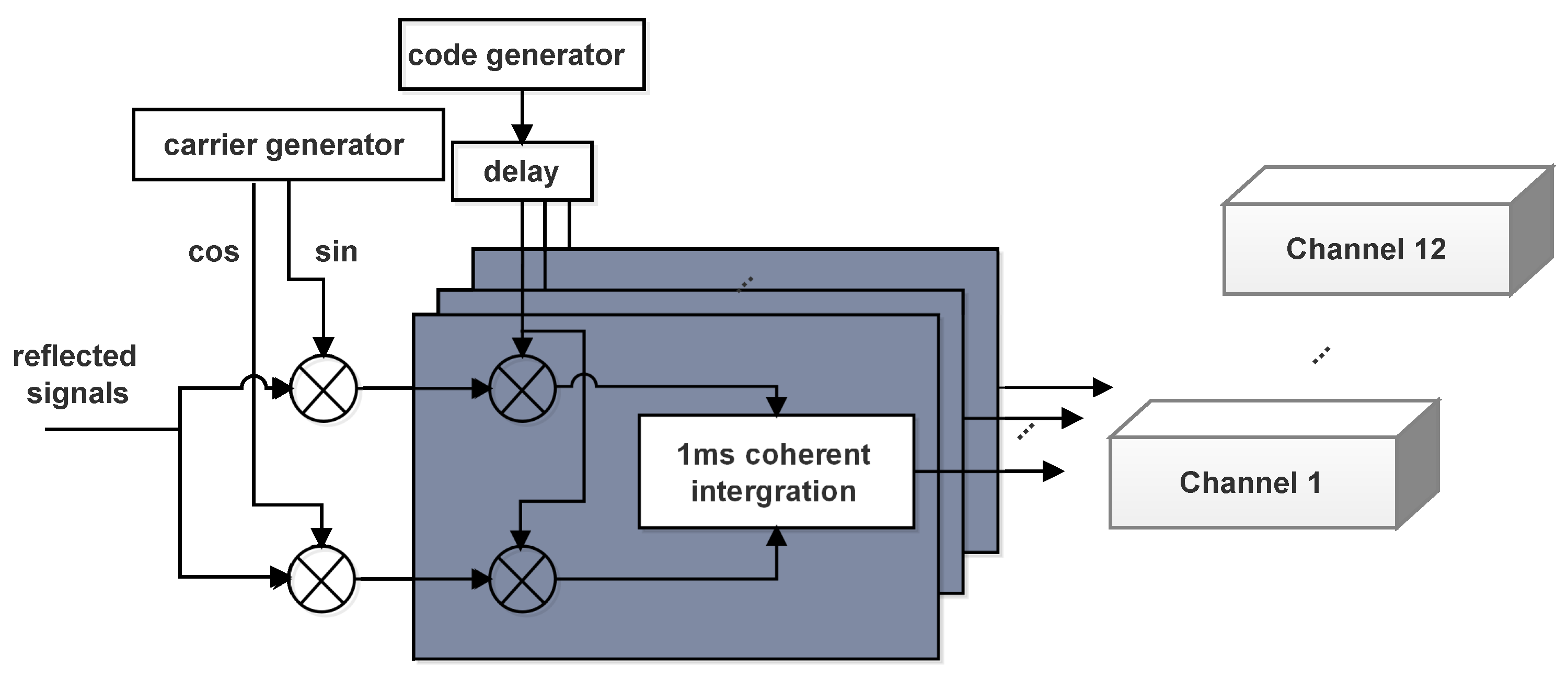
- The correlation power and positioning result are output by the baseband processing module, which is made up of FPGA and DSP.
- (3)
- Raspberry Pi, to finish data processing and uploading activities.
- (4)
- The power supply module, including a voltage transformer, which supplies the whole system with electricity.
- (5)
- A communication module with an antenna that allows for LTE wireless data transmission.
3.2. Local Server Group Implements
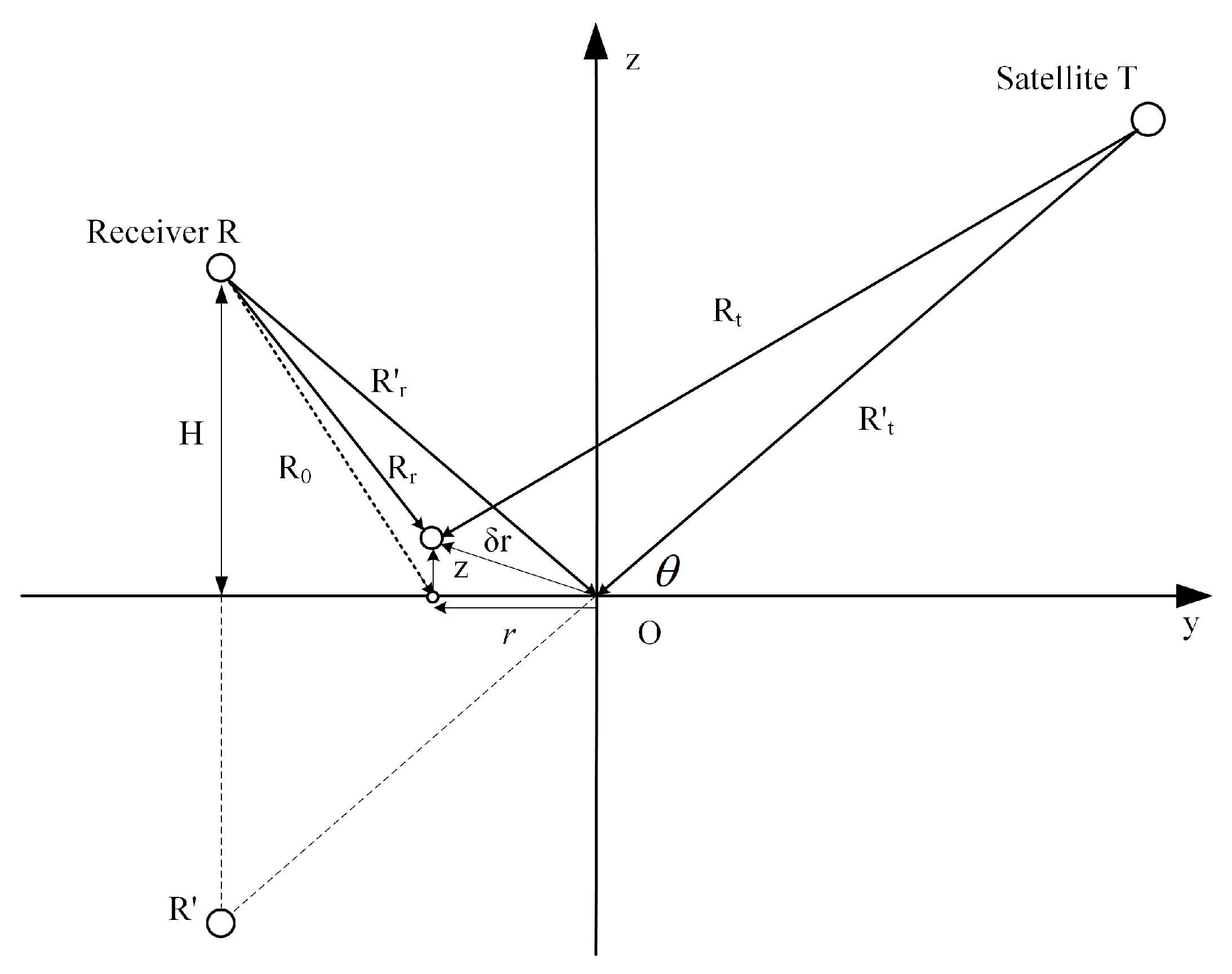
4. Sea Surface wind Speed and SWH Retrieval Algorithm from Reflection Measurement: A Background on the Discipline
5. Results of an In-Field Test
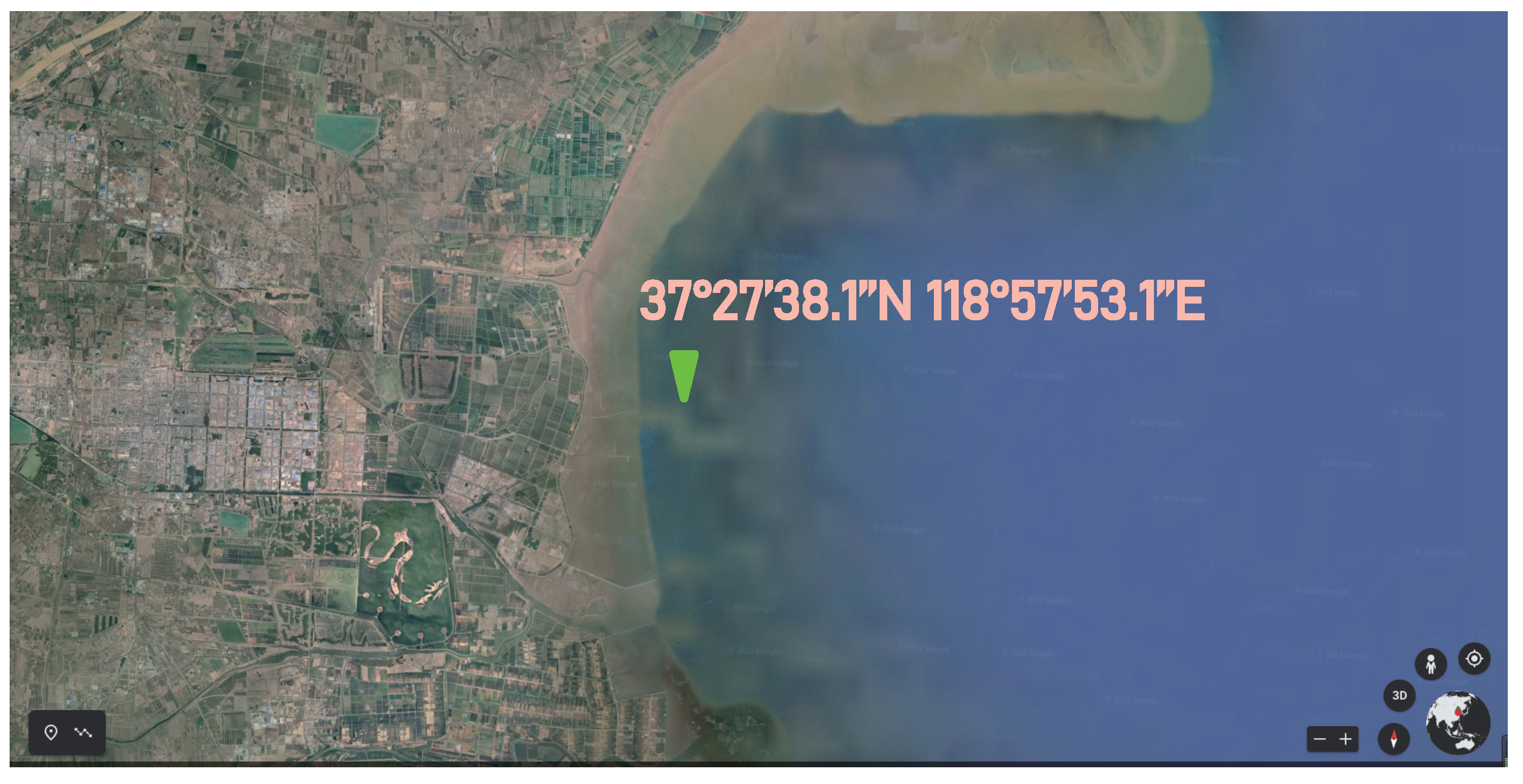
5.1. Site Description
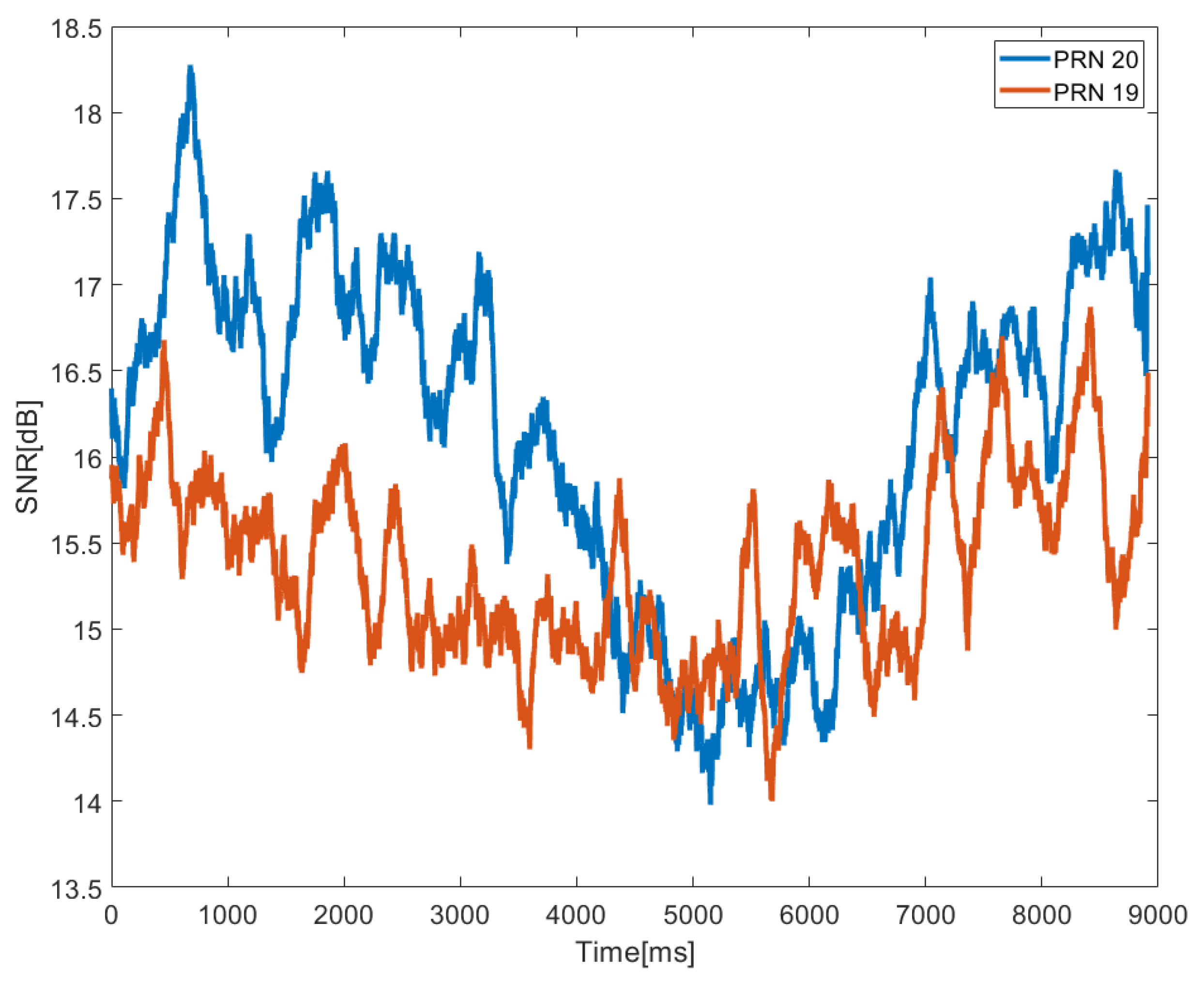
5.2. Test Campaign Results
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Srinivasan, R.; Zacharia, S.; Sudhakar, T.; Atmanand, M. Indigenous drifting buoys for the Indian ocean observations. In Proceedings of the OCEANS 2016 MTS/IEEE Monterey, Monterey, CA, USA, 19–23 September 2016; pp. 1–6. [Google Scholar]
- Khozaei, M.H.; Nourbakhsh, S.A. Analytical and Numerical Study of Fluid Flow in Propeller-type Current-meters. Int. J. Fluid Mach. Syst. 2019, 13, 437–454. [Google Scholar] [CrossRef]
- Yang, J.; Ni, T.; Liu, L.; Wen, J.; He, J.; Li, Z. The Sea Route Planning for Survey Vessel Intelligently Navigating to the Survey Lines. Sensors 2022, 22, 482. [Google Scholar] [CrossRef] [PubMed]
- United States Voluntary Observing Ship Program. Available online: https://vos.woc.noaa.gov/ (accessed on 10 April 2022).
- Walton, P.; Long, D. Space of solutions to ocean surface wind measurement using scatterometer constellations. J. Appl. Remote Sens. 2019, 13, 032506. [Google Scholar] [CrossRef]
- Etingof, M. Altimeters for linear measurements. Meas. Tech. 2013, 56, 866–867. [Google Scholar] [CrossRef]
- Franceschetti, G.; Lanari, R. Synthetic Aperture Radar Processing; CRC Press: Boca Raton, FL, USA, 2018. [Google Scholar]
- Martin-Neira, M. A passive reflectometry and interferometry system (PARIS): Application to ocean altimetry. ESA J. 1993, 17, 331–355. [Google Scholar]
- Li, W.; Rius, A.; Fabra, F.; Cardellach, E.; Ribo, S.; Martín-Neira, M. Revisiting the GNSS-R waveform statistics and its impact on altimetric retrievals. IEEE Trans. Geosci. Remote Sens. 2018, 56, 2854–2871. [Google Scholar] [CrossRef]
- Wang, F.; Zhang, B.; Yang, D.; Xing, J.; Zhang, G.; Yang, L. Four-Channel Interference of Dual-Antenna GNSS Reflectometry and Water Level Observation. IEEE Geosci. Remote Sens. Lett. 2022, 19, 8019305. [Google Scholar] [CrossRef]
- Strandberg, J.; Hobiger, T.; Haas, R. Real-time sea-level monitoring using Kalman filtering of GNSS-R data. GPS Solut. 2019, 23, 61. [Google Scholar] [CrossRef] [Green Version]
- Tabibi, S.; Sauveur, R.; Guerrier, K.; Metayer, G.; Francis, O. SNR-Based GNSS-R for Coastal Sea-Level Altimetry. Geosciences 2021, 11, 391. [Google Scholar] [CrossRef]
- Wang, F.; Yang, D.; Zhang, B.; Li, W.; Darrozes, J. Wind speed retrieval using coastal ocean-scattered GNSS signals. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2016, 9, 5272–5283. [Google Scholar] [CrossRef]
- Yan, Q.; Huang, W. Spaceborne GNSS-R sea ice detection using delay-Doppler maps: First results from the UK TechDemoSat-1 mission. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2016, 9, 4795–4801. [Google Scholar] [CrossRef]
- Yan, Q.; Huang, W. Sea ice sensing from GNSS-R data using convolutional neural networks. IEEE Geosci. Remote Sens. Lett. 2018, 15, 1510–1514. [Google Scholar] [CrossRef]
- Li, W.; Cardellach, E.; Fabra, F.; Rius, A.; Ribó, S.; Martín-Neira, M. First spaceborne phase altimetry over sea ice using TechDemoSat-1 GNSS-R signals. Geophys. Res. Lett. 2017, 44, 8369–8376. [Google Scholar] [CrossRef]
- Alonso-Arroyo, A.; Camps, A.; Park, H.; Pascual, D.; Onrubia, R.; Martín, F. Retrieval of significant wave height and mean sea surface level using the GNSS-R interference pattern technique: Results from a three-month field campaign. IEEE Trans. Geosci. Remote Sens. 2014, 53, 3198–3209. [Google Scholar] [CrossRef] [Green Version]
- Larson, K.M.; Small, E.E. Normalized microwave reflection index: A vegetation measurement derived from GPS networks. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2014, 7, 1501–1511. [Google Scholar] [CrossRef]
- Hong, X.; Zhang, B.; Geiger, A.; Han, M.; Yang, D. GNSS Pseudo Interference Reflectometry for Ground-Based Soil Moisture Remote Sensing: Theory and Simulations. IEEE Geosci. Remote Sens. Lett. 2022, 19, 8003705. [Google Scholar] [CrossRef]
- Di Simone, A.; Park, H.; Riccio, D.; Camps, A. Sea target detection using spaceborne GNSS-R delay-Doppler maps: Theory and experimental proof of concept using TDS-1 data. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2017, 10, 4237–4255. [Google Scholar] [CrossRef]
- Larson, K.M.; MacFerrin, M.; Nylen, T. Brief Communication: Update on the GPS reflection technique for measuring snow accumulation in Greenland. Cryosphere 2020, 14, 1985–1988. [Google Scholar] [CrossRef]
- Clarizia, M.P.; Ruf, C.S.; Jales, P.; Gommenginger, C. Spaceborne GNSS-R minimum variance wind speed estimator. IEEE Trans. Geosci. Remote Sens. 2014, 52, 6829–6843. [Google Scholar] [CrossRef]
- Rodriguez-Alvarez, N.; Akos, D.M.; Zavorotny, V.U.; Smith, J.A.; Camps, A.; Fairall, C.W. Airborne GNSS-R wind retrievals using delay–Doppler maps. IEEE Trans. Geosci. Remote Sens. 2012, 51, 626–641. [Google Scholar] [CrossRef]
- Qin, L.; Li, Y. Wind speed retrieval method for shipborne GNSS-R. IEEE Geosci. Remote Sens. Lett. 2020, 19, 1000205. [Google Scholar] [CrossRef]
- Gao, F.; Xu, T.; Meng, X.; Wang, N.; He, Y.; Ning, B. A Coastal Experiment for GNSS-R Code-Level Altimetry Using BDS-3 New Civil Signals. Remote Sens. 2021, 13, 1378. [Google Scholar] [CrossRef]
- Li, W.; Fabra, F.; Yang, D.; Rius, A.; Martín-Neira, M.; Cong, Y.; Qiang, W.; Cao, Y. Initial Results of Typhoon Wind Speed Observation Using Coastal GNSS-R of BeiDou GEO Satellite. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2016, 9, 4720–4729. [Google Scholar] [CrossRef]
- Yan, Q.; Huang, W. Tsunami detection and parameter estimation from GNSS-R delay-Doppler map. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2016, 9, 4650–4659. [Google Scholar] [CrossRef]
- Zhang, G.; Yang, D.; Yu, Y.; Wang, F. Wind direction retrieval using spaceborne GNSS-R in nonspecular geometry. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2020, 13, 649–658. [Google Scholar] [CrossRef]
- Rodriguez Alvarez, N. Contributions to Earth Observation Using GNSS-R Opportunity Signals. Ph.D. Thesis, Universitat Politècnica de Catalunya (UPC), Barcelona, Spain, 2011. [Google Scholar]
- Shafei, M.J.; Mashhadi-Hossainali, M. Application of the GNSS-R in tomographic sounding of the Earth atmosphere. Adv. Space Res. 2018, 62, 71–83. [Google Scholar] [CrossRef]
- Molina, C.; Semlali, B.B.; Park, H.; Camps, A. Possible Evidence of Earthquake Precursors Observed in Ionospheric Scintillation Events Observed from Spaceborne GNSS-R Data. In Proceedings of the 2021 IEEE International Geoscience and Remote Sensing Symposium IGARSS, Brussels, Belgium, 11–16 July 2021; pp. 8680–8683. [Google Scholar]
- Martín, F.; D’Addio, S.; Camps, A.; Martín-Neira, M. Modeling and analysis of GNSS-R waveforms sample-to-sample correlation. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2014, 7, 1545–1559. [Google Scholar] [CrossRef]
- Camps, A. Spatial resolution in GNSS-R under coherent scattering. IEEE Geosci. Remote Sens. Lett. 2019, 17, 32–36. [Google Scholar] [CrossRef]
- Li, W.; Cardellach, E.; Fabra, F.; Ribó, S.; Rius, A. Effects of PRN-Dependent ACF Deviations on GNSS-R Wind Speed Retrieval. IEEE Geosci. Remote Sens. Lett. 2019, 16, 327–331. [Google Scholar] [CrossRef]
- Dampf, J.; Pany, T.; Falk, N.; Riedl, B.; Winkel, J. Galileo altimetry using AltBOC and RTK techniques. Inside GNSS 2013, 8, 54–63. [Google Scholar]
- Rodriguez-Alvarez, N.; Aguasca, A.; Valencia, E.; Bosch-Lluis, X.; Camps, A.; Ramos-Perez, I.; Park, H.; Vall-Llossera, M. Snow thickness monitoring using GNSS measurements. IEEE Geosci. Remote Sens. Lett. 2012, 9, 1109–1113. [Google Scholar] [CrossRef]
- Ribot, M.A.; Kucwaj, J.C.; Botteron, C.; Reboul, S.; Stienne, G.; Leclère, J.; Choquel, J.-B.; Farine, P.-A.; Benjelloun, M. Normalized GNSS Interference Pattern Technique for Altimetry. Sensors 2014, 14, 10234–10257. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Rodriguez-Alvarez, N.; Camps, A.; Vall-Llossera, M.; Bosch-Lluis, X.; Sanchez, N. Land Geophysical Parameters Retrieval Using the Interference Pattern GNSS-R Technique. IEEE Trans. Geosci. Remote Sens. 2010, 49, 71–84. [Google Scholar] [CrossRef]
- Weiqiang, L.I. Design and Experiments of GNSS-R Receiver System for Remote Sensing. Geomat. Inf. Sci. Wuhan Univ. 2011, 36, 1204–1208. [Google Scholar]
- Troglia Gamba, M.; Marucco, G.; Pini, M.; Ugazio, S.; Falletti, E.; Lo Presti, L. Prototyping a GNSS-based passive radar for UAVs: An instrument to classify the water content feature of lands. Sensors 2015, 15, 28287–28313. [Google Scholar] [CrossRef] [PubMed]
- Camps, A.; Marchan-Hernandez, J.; Ramos-Perez, I.; Bosch-Lluis, X.; Prehn, R. New Radiometer Concepts for Ocean Remote Sensing: Description of the Passive Advanced Unit (PAU) for Ocean Monitoring. In Proceedings of the 2006 IEEE International Symposium on Geoscience and Remote Sensing, Denver, CO, USA, 31 July–4 August 2006; pp. 3988–3991. [Google Scholar]
- Marchan-Hernandez, J.F.; Ramos-Perez, I.; Bosch-Lluis, X.; Camps, A.; Albiol, D. PAU-GNSS/R, a real-time GPS-reflectometer for earth observation applications: Architecture insights and preliminary results. In Proceedings of the IEEE International Geoscience & Remote Sensing Symposium, Barcelona, Spain, 23–28 July 2007. [Google Scholar]
- Garrison, J.L.; Komjathy, A.; Zavorotny, V.U.; Katzberg, S.J. Wind speed measurement using forward scattered GPS signals. IEEE Trans. Geosci. Remote Sens. 2002, 40, 50–65. [Google Scholar] [CrossRef] [Green Version]
- Kelley, C. OpenSource GPS Open Source Software for Learning about GPS. In Proceedings of the 18th International Technical Meeting of the Satellite Division of the Institute of Navigation (ION GNSS 2005), Long Beach, CA, USA, 13–16 September 2005; pp. 2800–2810. [Google Scholar]
- Nogués-Correig, O.; Galí, E.C.; Campderrós, J.S.; Rius, A. A GPS-reflections receiver that computes Doppler/delay maps in real time. IEEE Trans. Geosci. Remote Sens. 2006, 45, 156–174. [Google Scholar] [CrossRef]
- Jazwinski, A.H. Stochastic processes and filtering theory. IEEE Trans. Autom. Control 2003, 17, 752–753. [Google Scholar]
- Soulat, F.; Caparrini, M.; Germain, O.; Lopez-Dekker, P.; Taani, M.; Ruffini, G. Sea state monitoring using coastal GNSS-R. Geophys. Res. Lett. 2004, 31, 1303. [Google Scholar] [CrossRef] [Green Version]
- Ruffini, G.; Soulat, F. On the GNSS-R interferometric complex field coherence time. arXiv 2004, arXiv:physics/0406084. [Google Scholar]
- Elfouhaily, T.; Thompson, D.R.; Linstrom, L. Delay-Doppler analysis of bistatically reflected signals from the ocean surface: Theory and application. IEEE Trans. Geosci. Remote Sens. 2002, 40, 560–573. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value |
|---|---|
| Antenna standing wave ratio | 1.4 dB |
| Antenna gain | 12 dB |
| Antenna front to back ratio | 24 dB |
| Axial ratio | 2 dB |
| Polarization isolation | 20 dB |
| Low noise amplifier LNA gain | 34 dB |
| DC | 3–5 V 40 mA |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xing, J.; Yu, B.; Yang, D.; Li, J.; Shi, Z.; Zhang, G.; Wang, F. A Real-Time GNSS-R System for Monitoring Sea Surface Wind Speed and Significant Wave Height. Sensors 2022, 22, 3795. https://doi.org/10.3390/s22103795
Xing J, Yu B, Yang D, Li J, Shi Z, Zhang G, Wang F. A Real-Time GNSS-R System for Monitoring Sea Surface Wind Speed and Significant Wave Height. Sensors. 2022; 22(10):3795. https://doi.org/10.3390/s22103795
Chicago/Turabian StyleXing, Jin, Baoguo Yu, Dongkai Yang, Jie Li, Zhejia Shi, Guodong Zhang, and Feng Wang. 2022. "A Real-Time GNSS-R System for Monitoring Sea Surface Wind Speed and Significant Wave Height" Sensors 22, no. 10: 3795. https://doi.org/10.3390/s22103795
APA StyleXing, J., Yu, B., Yang, D., Li, J., Shi, Z., Zhang, G., & Wang, F. (2022). A Real-Time GNSS-R System for Monitoring Sea Surface Wind Speed and Significant Wave Height. Sensors, 22(10), 3795. https://doi.org/10.3390/s22103795