
Partial Differential Equation-Constrained Diffeomorphic Registration from Sum of Squared Differences to Normalized Cross-Correlation, Normalized Gradient Fields, and Mutual Information: A Unifying Framework


Abstract
1. Introduction
2. PDE-Constrained LDDMM
2.1. LDDMM
2.2. Original PDE-Constrained LDDMM
2.3. Variants of PDE-LDDMM
2.3.1. Variant I
2.3.2. Variant II
2.4. Band-Limited PDE-LDDMM
2.4.1. BL Variant I
2.4.2. BL Variant II
3. Extending PDE-LDDMM from SSD to NCC, lNCC, NGFs, and MI Image Similarity Metrics
3.1. Changing the Image Similarity Metric in PDE-LDDMM
3.2. Normalized Cross-Correlation (NCC)
3.3. Local Normalized Cross-Correlation (lNCC)
3.4. Normalized Gradient Fields (NGFs)
3.5. Mutual Information (MI)
4. Experimental Setup
4.1. Datasets
4.2. Image Registration Pipeline
4.3. Numerical Details, Parameter Configuration, and Implementation Details
4.4. Benchmarks
- $synconvergence = “[50,,10]”,
- $synshrinkfactors = “1”,
- and $synsmoothingsigmas = “3vox”.
- $synconvergence = “[50×50×50,,10]”,
- $synshrinkfactors = “4×2×1”,
- and $synsmoothingsigmas = “3×2×1vox”.
4.5. Metrics and Statistical Analysis for Registration Evaluation
5. Results
5.1. Results on NIREP16
5.1.1. Evaluation
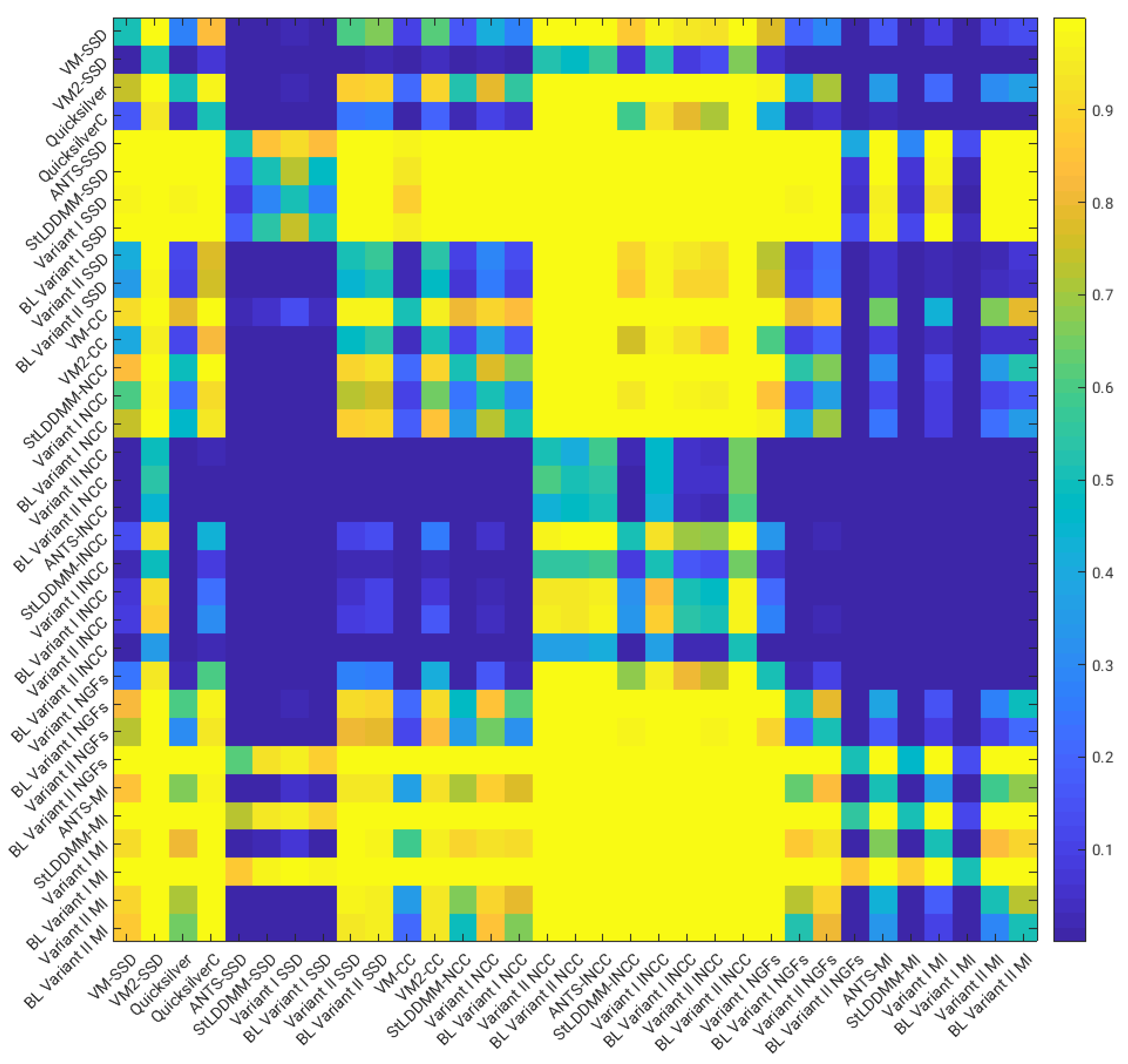
5.1.2. Quantitative Assessment
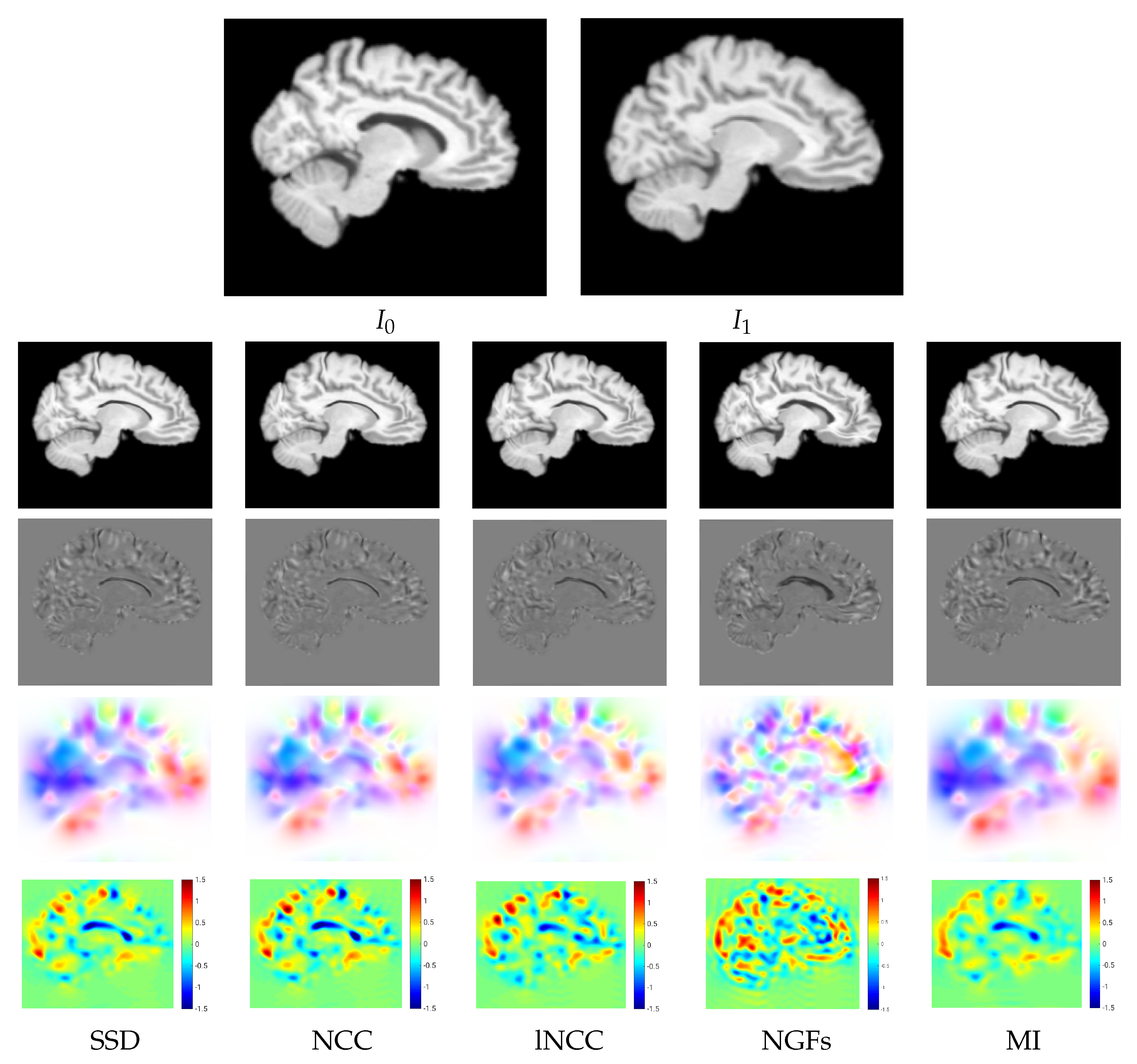
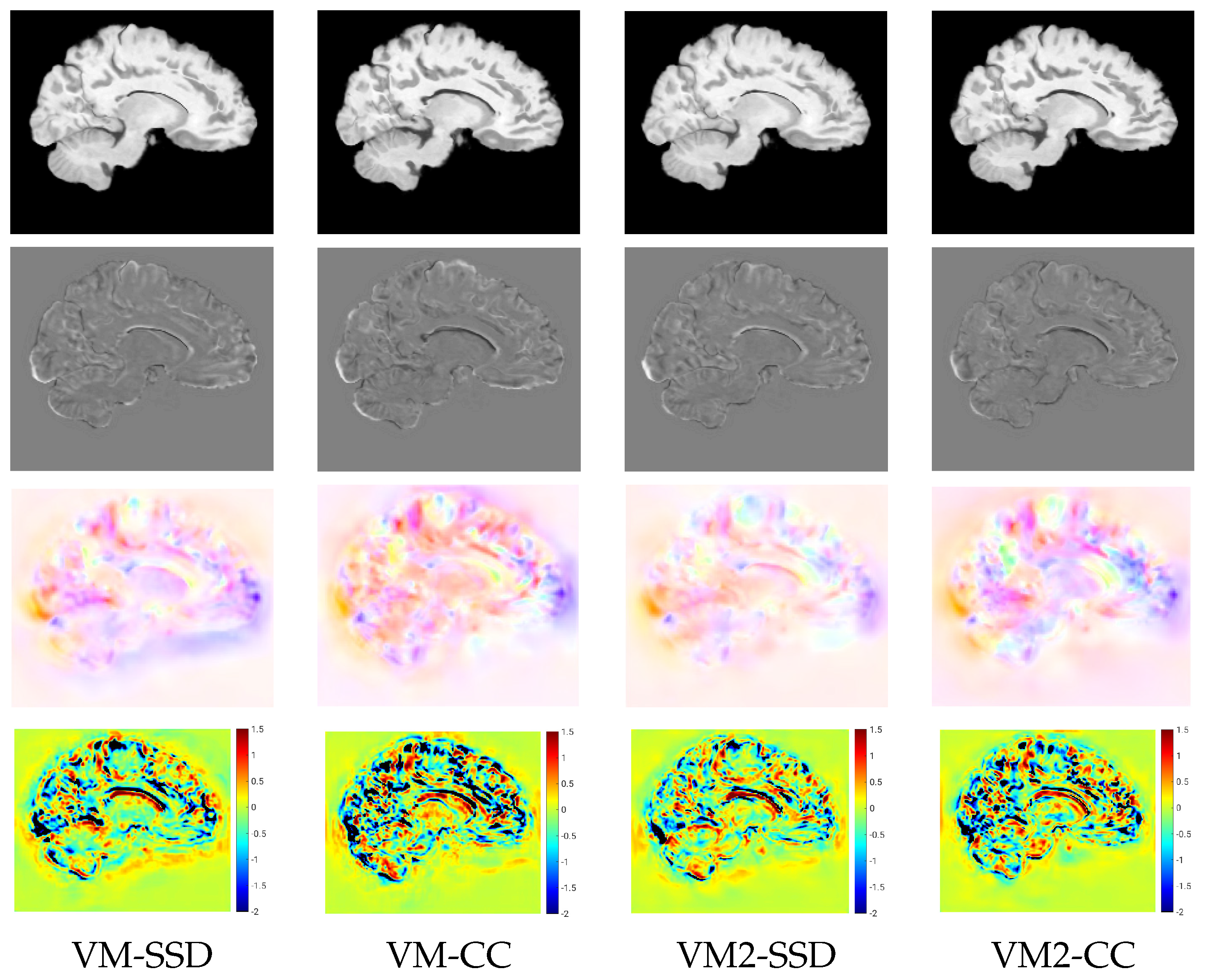
5.1.3. Qualitative Assessment
5.1.4. Computational Complexity
5.2. LPBA40, IBSR18, CUMC12, and MGH10 Evaluation Results
6. Multimodal Experiment
7. Discussion and Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Appendix A. Stationary LDDMM

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Metric | ||
|---|---|---|
| SSD | ||
| NCC | ||
| lNCC | ||
| NGFs | ||
| MI | n.a. |
Appendix B. Remarks on Normalized Gradient Fields (NGFs) Metric


| Multi-Resolution | ||||
|---|---|---|---|---|
| Metric | ||||
| SP Variant I, NGFs, GD | 22.98 ± 2.54 | 0.56 ± 0.66 | 0.14 ± 0.05 | 4.57 ± 0.46 |
| SP Variant I, NGFs, GN, FD | 29.08 ± 2.55 | 0.66 ± 0.26 | 0.05 ± 0.04 | 6.99 ± 1.74 |
| SP Variant I, NGFs, GN, PD | 28.86 ± 3.32 | 0.64 ± 0.17 | 0.04 ± 0.02 | 8.95 ± 2.32 |
| SP Variant I, NGFs, GN, D | 27.22 ± 2.31 | 0.68 ± 0.24 | 0.03 ± 0.02 | 8.96 ± 1.75 |
| SP Variant II, NGFs, GD | 20.63 ± 2.78 | 0.57 ± 0.28 | 0.23 ± 0.05 | 6.88 ± 1.59 |
| SP Variant II, NGFs, GN, FD | 24.20 ± 2.41 | 0.84 ± 0.15 | 0.23 ± 0.03 | 4.76 ± 1.08 |
| SP Variant II, NGFs, GN, PD | 23.92 ± 3.02 | 0.94 ± 0.08 | 0.20 ± 0.03 | 7.04 ± 2.20 |
| SP Variant II, NGFs, GN, D | 23.42 ± 2.74 | 0.85 ± 0.16 | 0.19 ± 0.03 | 7.38 ± 2.40 |
| BL Variant I, NGFs, GD | 24.38 ± 2.65 | 0.08 ± 0.02 | 0.21 ± 0.06 | 5.41 ± 0.85 |
| BL Variant I, NGFs, GN, FD | 24.10 ± 2.96 | 0.30 ± 0.15 | 0.09 ± 0.02 | 9.62 ± 1.90 |
| BL Variant I, NGFs, GN, PD | 23.45 ± 2.47 | 0.33 ± 0.19 | 0.09 ± 0.02 | 12.93 ± 3.35 |
| BL Variant I, NGFs, GN, D | 23.31 ± 2.16 | 0.37 ± 0.23 | 0.09 ± 0.02 | 12.07 ± 3.16 |
| BL Variant II, NGFs, GD | 21.32 ± 2.80 | 0.09 ± 0.05 | 0.22 ± 0.05 | 5.82 ± 0.96 |
| BL Variant II, NGFs, GN, FD | 23.04 ± 2.25 | 0.51 ± 0.20 | 0.07 ± 0.02 | 7.72 ± 2.24 |
| BL Variant II, NGFs, GN, PD | 22.39 ± 2.28 | 0.47 ± 0.23 | 0.08 ± 0.02 | 7.66 ± 1.49 |
| BL Variant II, NGFs, GN, D | 21.98 ± 2.14 | 0.53 ± 0.32 | 0.07 ± 0.02 | 8.16 ± 1.50 |
References
- Sotiras, A.; Davatzikos, C.; Paragios, N. Deformable Medical Image Registration: A Survey. IEEE Trans. Med. Imaging 2013, 32, 1153–1190. [Google Scholar] [CrossRef] [PubMed]
- Hua, X.; Leow, A.D.; Parikshak, N.; Lee, S.; Chiang, M.C.; Toga, A.W.; Jack, C.R.; Weiner, M.W.; Thompson, P.M.; Alzheimer’s Disease Neuroimaging Initiative. Tensor-based morphometry as a neuroimaging biomarker for Alzheimer’s disease: An MRI study of 676 AD, MCI, and normal subjects. Neuroimage 2008, 43, 458–469. [Google Scholar] [CrossRef] [PubMed]
- Miller, M.I.; Qiu, A. The emerging discipline of Computational Functional Anatomy. Neuroimage 2009, 45, 16–39. [Google Scholar] [CrossRef] [PubMed]
- Qiu, A.; Albert, M.; Younes, L.; Miller, M.I. Time sequence diffeomorphic metric mapping and parallell transport track time-dependent shape changes. Neuroimage 2009, 45, 51–60. [Google Scholar] [CrossRef] [PubMed]
- Durrleman, S.; Pennec, X.; Trouve, A.; Braga, J.; Gerig, G.; Ayache, N. Toward a Comprehensive Framework for the Spatiotemporal Statistical Analysis of Longitudinal Shape Data. Int. J. Comput. Vision 2013, 103, 22–59. [Google Scholar] [CrossRef] [PubMed]
- Zhang, M.; Fletcher, P.T. Bayesian Principal Geodesic Analysis for estimating Intrinsic diffeomorphic image variability. Med. Image Anal. 2015, 25, 37–44. [Google Scholar] [CrossRef]
- HadjHamou, M.; Lorenzi, M.; Ayache, N.; Pennec, X. Longitudinal analysis of image time series with diffeomorphic deformations: A computational framework based on stationary velocity fields. Front. Neurosci. 2016, 10, 236. [Google Scholar]
- Liu, Y.; Li, Z.; Ge, Q.; Lin, N.; Xiong, M. Deep feature selection and causal analysis of Alzheimer’s disease. Front. Neurosci. 2019, 13, 1198. [Google Scholar] [CrossRef]
- Schnabel, J.A.; Heinrich, M.P.; Papiez, B.W.; Brady, J.M. Advances and challenges in deformable image registration: From image fusion to complex motion modelling. Med. Image Anal. 2016, 33, 145–148. [Google Scholar] [CrossRef]
- Uneri, A.; Goerres, J.; de Silva, T. Deformable 3D-2D Registration of Known Components for Image Guidance in Spine Surgery. In Proceedings of the 19th International Conference on Medical Image Computing and Computer Assisted Intervention (MICCAI’16), Athens, Greece, 17–21 October 2016; pp. 124–132. [Google Scholar]
- Girija, J.; Krishna, G.N.; Chenna, P. 4D medical image registration: A survey. In Proceedings of the International Conference on Intelligent Sustainable Systems (ICISS17), Palladam, India, 7–8 December 2017. [Google Scholar]
- Mansi, T.; Pennec, X.; Sermesant, M.; Delingette, H.; Ayache, N. iLogDemons: A Demons-Based Registration Algorithm for Tracking Incompressible Elastic Biological Tissues. Int. J. Comput. Vis. 2011, 92, 92–111. [Google Scholar] [CrossRef]
- Mang, A.; Biros, G. An inexact Newton-Krylov algorithm for constrained diffeomorphic image registration. SIAM J. Imaging Sci. 2015, 8, 1030–1069. [Google Scholar] [CrossRef] [PubMed]
- Mang, A.; Biros, G. Constrained H1 regularization schemes for diffeomorphic image registration. SIAM J. Imaging Sci. 2016, 9, 1154–1194. [Google Scholar] [CrossRef] [PubMed]
- Mang, A.; Gholami, A.; Davatzikos, C.; Biros, G. PDE-constrained optimization in medical image analysis. Optim. Eng. 2018, 19, 765–812. [Google Scholar] [CrossRef]
- Hart, G.L.; Zach, C.; Niethammer, M. An optimal control approach for deformable registration. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR’09), Miami, FL, USA, 20–25 June 2009. [Google Scholar]
- Vialard, F.X.; Risser, L.; Rueckert, D.; Cotter, C.J. Diffeomorphic 3D Image Registration via Geodesic Shooting using an Efficient Adjoint Calculation. Int. J. Comput. Vision 2011, 97, 229–241. [Google Scholar] [CrossRef]
- Polzin, T.; Niethammer, M.; Heinrich, M.P.; Handels, H.; Modersitzki, J. Memory efficient LDDMM for lung CT. In Proceedings of the 19th International Conference on Medical Image Computing and Computer Assisted Intervention (MICCAI’16), Athens, Greece, 17–21 October 2016; pp. 28–36. [Google Scholar]
- Mang, A.; Gholami, A.; Davatzikos, C.; Biros, G. Claire: A distributed-memory solver for constrained large deformation diffeomorphic image registration. SIAM J. Sci. Comput. 2019, 41, C548–C584. [Google Scholar] [CrossRef] [PubMed]
- Hernandez, M. Band-Limited Stokes Large Deformation Diffeomorphic Metric Mapping. IEEE J. Biomed. Health Inform. 2019, 23, 362–373. [Google Scholar] [CrossRef] [PubMed]
- Hernandez, M. PDE-constrained LDDMM via geodesic shooting and inexact Gauss-Newton-Krylov optimization using the incremental adjoint Jacobi equations. Phys. Med. Biol. 2019, 64, 025002. [Google Scholar] [CrossRef]
- Hernandez, M. A comparative study of different variants of Newton-Krylov PDE-constrained Stokes-LDDMM parameterized in the space of band-limited vector fields. SIAM J. Imaging Sci. 2019, 12, 1038–1070. [Google Scholar] [CrossRef]
- Hogea, C.; Davatzikos, C.; Biros, G. Brain-tumor interaction biophysical models for medical image registration. SIAM J. Imaging Sci. 2008, 30, 3050–3072. [Google Scholar] [CrossRef]
- Mang, A.; Toma, A.; Schuetz, T.A.; Becker, S.; Eckey, T.; Mohr, C.; Petersen, D.; Buzug, T.M. Biophysical modeling of brain tumor progression: From unconditionally stable explicit time integration to an inverse problem with parabolic PDE constraints for model calibration. Med. Phys. 2012, 39, 4444–4460. [Google Scholar] [CrossRef]
- Gholami, A.; Mang, A.; Biros, G. An inverse problem formulation for parameter estimation of a reaction-diffusion model for low grade gliomas. J. Math. Biol. 2016, 72, 409–433. [Google Scholar] [CrossRef] [PubMed]
- Khanal, B.; Lorenzi, M.; Ayache, N.; Pennec, X. A biophysical model of brain deformation to simulate and analyze longitudinal MRIs of patients with Alzheimer’s disease. Neuroimage 2016, 134, 35–52. [Google Scholar] [CrossRef] [PubMed]
- Yang, X.; Niethammer, M. Uncertainty quantification for LDDMM using a low-rank Hessian approximation. In Proceedings of the 18th International Conference on Medical Image Computing and Computer Assisted Intervention (MICCAI’15), Lecture Notes in Computer Science, Munich, Germany, 5–9 October 2015; Volume 9350, pp. 289–296. [Google Scholar]
- Wang, J.; Wells, W.M.; Golland, P.; Zhang, M. Registration uncertainty quantification via low-dimensional characterization of geometric deformations. Magn. Reson. Imaging 2019, 64, 122–131. [Google Scholar] [CrossRef] [PubMed]
- Brunn, M.; Himthani, N.; Biros, G.; Mehl, M. Fast GPU 3D diffeomorphic image registration. J. Parallel Distrib. Comput. 2020, 149, 149–162. [Google Scholar] [CrossRef]
- Kutten, K.S.; Charon, N.; Miller, M.I.; Ratnanather, J.T.; Deisseroth, K.; Ye, L.; Vogelstein, J.T. A Diffeomorphic Approach to Multimodal Registration with Mutual Information: Applications to CLARITY Mouse Brain Images. arXiv 2016, arXiv:1612.00356v2. [Google Scholar]
- Modersitzki, J. Numerical Methods for Image Registration; Oxford University Press: Oxford, UK, 2004. [Google Scholar]
- Modersitzki, J. FAIR: Flexible Algorithms for Image Registration; SIAM: Philadelphia, PA, USA, 2009. [Google Scholar]
- Hernandez, M. Combining the Band-Limited Parameterization and Semi-Lagrangian Runge–Kutta Integration for Efficient PDE-Constrained LDDMM. J. Math. Imaging Vis. 2021, 63, 555–579. [Google Scholar] [CrossRef]
- Rueckert, D.; Sonoda, L.I.; Hayes, C.; Hill, D.L.; Leach, M.O.; Hawkes, J. Nonrigid Registration Using Free-Form Deformations: Application to Breast MR Images. IEEE Trans. Med. Imaging 1999, 18, 712–721. [Google Scholar] [CrossRef]
- Haber, E.; Modersitzki, J. Beyond Mutual Information: A Simple and Robust Alternative. In Bildverarbeitung Für Die Medizin; Springer: Berlin/Heidelberg, Germany, 2005; pp. 350–355. [Google Scholar]
- Avants, B.B.; Tustison, N.J.; Song, G.; Cook, P.A.; Klein, A.; Gee, J.C. A reproducible evaluation of ANTs similarity metric performance in brain image registration. Neuroimage 2011, 54, 2033–2044. [Google Scholar] [CrossRef]
- Myronenko, A.; Song, X. Intensity-based Image Registration by Minimizing Residual Complexity. IEEE Trans. Med. Imaging 2010, 29, 1882–1891. [Google Scholar] [CrossRef]
- Lorenzi, M.; Ayache, N.; Frisoni, G.; Pennec, X.; ADNI. LCC-Demons: A robust and accurate symmetric diffeomorphic registration algorithm. Neuroimage 2013, 81, 470–483. [Google Scholar] [CrossRef]
- Hernandez, M. Efficient momentum conservation constrained PDE-LDDMM with Gauss–Newton–Krylov optimization, Semi-Lagrangian Runge–Kutta solvers, and the band-limited parameterization. J. Comput. Sci. 2021, 55, 101470. [Google Scholar] [CrossRef]
- Avants, B.B.; Epstein, C.L.; Grossman, M.; Gee, J.C. Symmetric diffeomorphic image registration with cross-correlation: Evaluating automated labeling of elderly and neurodegenerative brain. Med. Image Anal. 2008, 12, 26–41. [Google Scholar] [CrossRef] [PubMed]
- Christensen, G.E.; Geng, X.; Kuhl, J.G.; Bruss, J.; Grabowski, T.J.; Pirwani, I.A.; Vannier, M.W.; Allen, J.S.; Damasio, H. Introduction to the Non-rigid Image Registration Evaluation Project (NIREP). In Proceedings of the 3rd International Workshop on Biomedical Image Registration (WBIR’06), Utrecht, The Netherlands, 9–11 July 2006; Volume 4057, pp. 128–135. [Google Scholar]
- Klein, A.; Andersson, J.; Ardekani, B.A.; Ashburner, J.; Avants, B.; Chiang, M.C.; Christensen, G.E.; Collins, D.L.; Gee, J.; Hellier, P.; et al. Evaluation of 14 nonlinear deformation algorithms applied to human brain MRI registration. Neuroimage 2009, 46, 786–802. [Google Scholar] [CrossRef] [PubMed]
- Dosovitskiy, A.; Fischer, P.; Ilg, E.; Hausser, P.; Hazirbas, C.; Golkov, V.; Van Der Smagt, P.; Cremers, D.; Brox, T. FlowNet: Learning Optical Flow with Convolutional Networks. In Proceedings of the 15th IEEE International Conference on Computer Vision (ICCV’15), Santiago, Chile, 11–18 December 2015. [Google Scholar]
- Boveiri, H.; Khayami, R.; Javidan, R.; Mehdizadeh, A. Medical image registration using deep neural networks: A comprehensive review. Comput. Electr. Eng. 2020, 87, 106767. [Google Scholar] [CrossRef]
- Rohe, M.M.; Datar, M.; Heimann, T.; Sermesant, M.; Pennec, X. SVF-Net: Learning deformable image registration using shape matching. In Proceedings of the 20th International Conference on Medical Image Computing and Computer Assisted Intervention (MICCAI’17), Quebec City, QC, Canada, 11–13 September 2017; pp. 266–274. [Google Scholar]
- Yang, X.; Kwitt, R.; Styner, M.; Niethammer, M. Quicksilver: Fast Predictive Image Registration—A Deep Learning Approach. Neuroimage 2017, 158, 378–396. [Google Scholar] [CrossRef]
- Dalca, A.V.; Blakrishnan, G.; Guttag, J.; Sabuncu, M. Unsupervised learning for fast probabilistic diffeomorphic registration. In Proceedings of the 21th International Conference on Medical Image Computing and Computer Assisted Intervention (MICCAI’18), Granada, Spain, 16–20 September 2018; pp. 729–738. [Google Scholar]
- Krebs, J.; Delingetter, H.; Mailhe, B.; Ayache, N.; Mansi, T. Learning a probabilistic model for diffeomorphic registration. IEEE Trans. Med. Imaging 2019, 38, 2165–2176. [Google Scholar] [CrossRef]
- Fan, J.; Cao, X.; Yap, P.; Shen, D. BIRNet: Brain image registration using dual-supervised fully convolutional networks. Med. Image Anal. 2019, 54, 193–206. [Google Scholar] [CrossRef]
- Balakrishnan, G.; Zhao, A.; Sabuncu, M.R.; Guttag, J.; Dalca, A.V. VoxelMorph: A Learning Framework for Deformable Medical Image Registration. IEEE Trans. Med. Imaging 2019, 38, 1788–1800. [Google Scholar] [CrossRef]
- Wang, J.; Zhang, M. DeepFLASH: An efficient network for learning-based medical image registration. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR’20), Seattle, WA, USA, 13–20 June 2020. [Google Scholar]
- Mok, T.; Chung, A. Large Deformation Diffeomorphic Image Registration with Laplacian Pyramid Networks. In Proceedings of the 23th International Conference on Medical Image Computing and Computer Assisted Intervention (MICCAI’20), Lima, Peru, 4–8 October 2020. [Google Scholar]
- Hoffmann, M.; Billot, B.; Greve, D.; Iglesias, J.; Fischl, B.; Dalca, A. SynthMorph: Learning image registration without images. IEEE Trans. Med. Imaging 2021. [Google Scholar] [CrossRef]
- Hoopes, A.; Hoffmann, M.; Fischl, B.; Guttag, J.; Dalca, A. HyperMorph: Amortized Hyperparameter Learning for Image Registration. In Proceedings of the International Conference on Information Processing and Medical Imaging (IPMI’21), Virtual, 28–30 June 2021; Volume 12729, pp. 3–17. [Google Scholar]
- Hering, A.; Hansen, L.; Mok, T.C.; Chung, A.; Siebert, H.; Häger, S.; Lange, A.; Kuckertz, S.; Heldmann, S.; Shao, W.; et al. Learn2Reg: Comprehensive multi-task medical image registration challenge, dataset and evaluation in the era of deep learning. arXiv 2021, arXiv:2112.04489. [Google Scholar]
- Beg, M.F.; Miller, M.I.; Trouve, A.; Younes, L. Computing Large Deformation Metric Mappings via Geodesic Flows of Diffeomorphisms. Int. J. Comput. Vis. 2005, 61, 139–157. [Google Scholar] [CrossRef]
- Younes, L.; Qiu, A.; Winslow, R.L.; Miller, M.I. Transport of Relational Structures in Groups of Diffeomorphisms. J. Math. Imaging Vis. 2008, 32, 41–56. [Google Scholar] [CrossRef] [PubMed]
- Zhang, M.; Fletcher, T. Fast diffeomorphic image registration via Fourier-Approximated Lie algebras. Int. J. Comput. Vis. 2019, 127, 61–73. [Google Scholar] [CrossRef]
- Zhang, M.; Fletcher, P.T. Finite-Dimensional Lie algebras for fast diffeomorphic image registration. In Proceedings of the International Conference on Information Processing and Medical Imaging (IPMI’15), Isle of Skye, UK, 28 June–3 July 2015. [Google Scholar]
- Zhang, M.; Liao, R.; Dalca, A.V.; Truk, E.A.; Luo, J.; Grant, P.E.; Golland, P. Frequency Diffeomorphisms for Efficient Image Registration. In Proceedings of the International Conference on Information Processing and Medical Imaging (IPMI’17), Boone, NC, USA, 25–30 June 2017; pp. 559–570. [Google Scholar]
- Dame, A.; Marchand, E. Second-order optimization of mutual information for real-time image registration. IEEE Trans. Image Process. 2012, 21, 4190–4203. [Google Scholar] [CrossRef]
- Ou, Y.; Akbari, H.; Bilello, M.; Da, X.; Davatzikos, C. Comparative evaluation of registration algorithms in different brain databases with varying difficulty: Results and insights. IEEE Trans. Med. Imaging 2014, 33, 2039–2065. [Google Scholar] [CrossRef]
- Hernandez, M. Primal-Dual convex optimization in Large Deformation Diffeomorphic Metric Mapping: LDDMM meets robust regularizers. Phys. Med. Biol. 2017, 62, 9067–9098. [Google Scholar] [CrossRef]
- Hernandez, M. Primal-dual optimization strategies in Huber-L1 optical flow with temporal subspace constraints for non-rigid sequence registration. Image Vis. Comput. 2018, 69, 44–67. [Google Scholar] [CrossRef]
- Ruijters, D.; Thevenaz, P. GPU Prefilter for Accurate Cubic B-Spline Interpolation. Comput. J. 2012, 55, 15–20. [Google Scholar] [CrossRef]
- Trefethen, L.N. Spectral Methods in Matlab; SIAM: Philadelphia, PA, USA, 2000. [Google Scholar]
- Hernandez, M. Gauss-Newton inspired preconditioned optimization in large deformation diffeomorphic metric mapping. Phys. Med. Biol. 2014, 59, 6085–6115. [Google Scholar] [CrossRef]
- Rohlfing, T. Image similarity and tissue overlaps as surrogates for image registration accuracy: Widely used but unreliable. IEEE Trans. Med. Imaging 2012, 31, 153–163. [Google Scholar] [CrossRef]
- Spasov, S.E.; Passamonti, L.; Duggento, A.; Lio, P.; Toschi, N.; Alzheimer’s Disease Neuroimaging Initiative. A parameter-efficient deep learning approach to predict conversion from mild cognitive impairment to Alzheimer’s disease. Neuroimage 2019, 189, 276–287. [Google Scholar] [CrossRef] [PubMed]
- Ramon-Julvez, U.; Hernandez, M.; Mayordomo, E.; Alzheimer’s Disease Neuroimaging Initiative. Analysis of the influence of diffeomorphic normalization in the prediction of stable vs. progressive MCI conversion with convolutional neural networks. In Proceedings of the 17th IEEE International Symposium on Biomedical Imaging: From Nano to Macro (ISBI’20), Iowa City, IA, USA, 3–7 April 2020. [Google Scholar]
- Hernandez, M.; Olmos, S. Gauss-Newton optimization in diffeomorphic registration. In Proceedings of the 5th IEEE International Symposium on Biomedical Imaging: From Nano to Macro (ISBI’08), Paris, France, 14–17 May 2008. [Google Scholar]
- Vercauteren, T.; Pennec, X.; Perchant, A.; Ayache, N. Diffeomorphic Demons: Efficient non-parametric image registration. Neuroimage 2009, 45, S61–S72. [Google Scholar] [CrossRef] [PubMed]
- Arsigny, V.; Commonwick, O.; Pennec, X.; Ayache, N. Statistics on Diffeomorphisms in a Log-Euclidean framework. In Proceedings of the 9th International Conference on Medical Image Computing and Computer Assisted Intervention (MICCAI’06), Lecture Notes in Computer Science, Copenhagen, Denmark, 1–6 October 2006; Volume 4190, pp. 924–931. [Google Scholar]








| Factor I | Factor II | p-Value I | p-Value II |
|---|---|---|---|
| Baseline vs. SP Variant I | |||
| Baseline vs. BL Variant I | |||
| Baseline vs. SP Variant II | |||
| Baseline vs. BL Variant II | |||
| PDE-LDDMM methods | |||
| SP Variant I vs. SP Variant II | 0.339 | 0 | |
| BL Variant I vs. BL Variant II | |||
| SP Variant I vs. BL Variant I | 0.0284 | 0 | |
| SP Variant II vs. BL Variant II | 0.0068 | 0 |
| Metric | ||||
|---|---|---|---|---|
| Single-resolution | ||||
| SP Variant I, SSD, GN | 18.29 ± 2.83 | 0.07 ± 0.05 | 0.16 ± 0.05 | 3.70 ± 0.51 |
| SP Variant I, NCC, GN | 16.51 ± 2.13 | 0.17 ± 0.01 | 0.01 ± 0.02 | 3.92 ± 0.68 |
| SP Variant I, lNCC, GN | 20.56 ± 2.31 | 0.49 ± 0.32 | 0.04 ± 0.03 | 3.79 ± 0.40 |
| SP Variant I, NGFs, GN | 39.14 ± 2.91 | 0.71 ± 0.15 | 0.14 ± 0.03 | 4.67 ± 0.35 |
| SP Variant I, MI, GD | 24.34 ± 2.58 | 0.13 ± 0.06 | 0.18 ± 0.06 | 2.17 ± 0.15 |
| SP Variant II, SSD, GN | 17.10 ± 1.50 | 0.12 ± 0.05 | 0.14 ± 0.05 | 5.02 ± 1.01 |
| SP Variant II, NCC, GN | 15.34 ± 1.95 | 0.15 ± 0.06 | 0.10 ± 0.05 | 6.31 ± 1.65 |
| SP Variant II, lNCC, GN | 24.34 ± 2.90 | 0.30 ± 0.08 | 0.20 ± 0.03 | 3.71 ± 0.64 |
| SP Variant II, NGFs, GN | 46.78 ± 2.50 | 0.67 ± 0.13 | 0.34 ± 0.03 | 3.65 ± 0.46 |
| SP Variant II, MI, GD | 22.26 ± 2.42 | 0.12 ± 0.02 | 0.26 ± 0.05 | 2.61 ± 0.32 |
| BL Variant I, SSD, GN | 19.89 ± 1.76 | 0.01 ± 0.00 | 0.29 ± 0.03 | 3.45 ± 0.29 |
| BL Variant I, NCC, GN | 17.06 ± 1.71 | 0.03 ± 0.01 | 0.09 ± 0.04 | 4.56 ± 0.59 |
| BL Variant I, lNCC, GN | 24.30 ± 2.68 | 0.14 ± 0.06 | 0.17 ± 0.03 | 3.69 ± 0.49 |
| BL Variant I, NGFs, GN | 71.93 ± 1.78 | 0.78 ± 0.08 | 0.62 ± 0.02 | 1.56 ± 0.05 |
| BL Variant I, MI, GD | 26.21 ± 2.66 | 0.02 ± 0.00 | 0.28 ± 0.04 | 2.19 ± 0.14 |
| BL Variant II, SSD, GN | 17.77 ± 1.66 | 0.04 ± 0.01 | 0.13 ± 0.04 | 4.81 ± 0.72 |
| BL Variant II, NCC, GN | 15.57 ± 1.71 | 0.05 ± 0.02 | 0.09 ± 0.04 | 6.29 ± 1.15 |
| BL Variant II, lNCC, GN | 22.74 ± 2.77 | 0.16 ± 0.04 | 0.17 ± 0.04 | 4.41 ± 0.76 |
| BL Variant II, NGFs, GN | 71.77 ± 1.75 | 0.91 ± 0.08 | 0.60 ± 0.02 | 1.56 ± 0.05 |
| BL Variant II, MI, GD | 23.30 ± 2.61 | 0.03 ± 0.01 | 0.28 ± 0.04 | 2.46 ± 0.18 |
| Multi-resolution | ||||
| SP Variant I, SSD, GN | 17.98 ± 2.71 | 2.50 ± 3.49 | 0.02 ± 0.08 | 3.67 ± 0.82 |
| SP Variant I, NCC, GN | 14.89 ± 2.24 | 1.33 ± 0.89 | 0.04 ± 0.12 | 9.77 ± 20.45 |
| SP Variant I, lNCC, GN | 12.94 ± 3.11 | 0.72 ± 0.37 | 0.01 ± 0.02 | 5.17 ± 1.18 |
| SP Variant I, NGFs, GN | 29.08 ± 2.55 | 0.66 ± 0.26 | 0.05 ± 0.04 | 6.99 ± 1.74 |
| SP Variant I, MI, GD | 18.35 ± 2.19 | 0.99 ± 1.39 | 0.06 ± 0.06 | 3.26 ± 0.31 |
| SP Variant II, SSD, GN | 15.93 ± 1.51 | 1.13 ± 0.67 | 0.12 ± 0.03 | 9.89 ± 6.86 |
| SP Variant II, NCC, GN | 13.12 ± 1.69 | 1.02 ± 0.27 | 0.08 ± 0.03 | 14.32 ± 11.37 |
| SP Variant II, lNCC, GN | 15.23 ± 2.20 | 1.10 ± 0.39 | 0.10 ± 0.03 | 5.52 ± 0.81 |
| SP Variant II, NGFs, GN | 24.20 ± 2.41 | 0.84 ± 0.15 | 0.23 ± 0.03 | 4.76 ± 1.08 |
| SP Variant II, MI, GD | 19.15 ± 2.41 | 0.46 ± 0.08 | 0.17 ± 0.04 | 4.14 ± 1.30 |
| BL Variant I, SSD, GN | 19.22 ± 1.72 | 0.11 ± 0.05 | 0.14 ± 0.06 | 3.74 ± 0.38 |
| BL Variant I, NCC, GN | 15.81 ± 1.62 | 0.21 ± 0.07 | 0.09 ± 0.05 | 5.04 ± 0.76 |
| BL Variant I, lNCC, GN | 14.41 ± 2.45 | 0.82 ± 0.25 | 0.08 ± 0.04 | 6.32 ± 1.64 |
| BL Variant I, NGFs, GN | 24.10 ± 2.96 | 0.30 ± 0.15 | 0.09 ± 0.02 | 9.62 ± 1.90 |
| BL Variant I, MI, GD | 18.35 ± 2.19 | 0.31 ± 0.21 | 0.06 ± 0.06 | 3.26 ± 0.31 |
| BL Variant II, SSD, GN | 16.30 ± 1.60 | 0.25 ± 0.08 | 0.11 ± 0.04 | 6.30 ± 1.64 |
| BL Variant II, NCC, GN | 13.65 ± 1.72 | 0.47 ± 0.19 | 0.07 ± 0.03 | 9.46 ± 2.78 |
| BL Variant II, lNCC, GN | 13.67 ± 2.26 | 1.00 ± 0.48 | 0.08 ± 0.03 | 7.92 ± 1.23 |
| BL Variant II, NGFs, GN | 23.04 ± 2.25 | 0.51 ± 0.20 | 0.07 ± 0.02 | 7.72 ± 2.24 |
| BL Variant II, MI, GD | 19.35 ± 2.50 | 0.13 ± 0.15 | 0.17 ± 0.05 | 3.80 ± 0.63 |
| Metric | |||
|---|---|---|---|
| VM-SSD | 17.82 ± 0.98 | −13.04 ± 5.72 | 86.12 ± 97.05 |
| VM-CC | 20.25 ± 0.93 | −14.89 ± 3.87 | 59.69 ± 11.59 |
| VM2-SSD | 16.35 ± 0.67 | −9.26 ± 5.26 | 53.13 ± 26.16 |
| VM2-CC | 14.34 ± 0.95 | −7.65 ± 1.56 | 46.91 ± 7.83 |
| QuickSilver | 19.03 ± 1.37 | 0.31 ± 0.03 | 9.54 ± 2.44 |
| QuickSilver-C | 15.75 ± 1.27 | 0.32 ± 0.05 | 9.59 ± 2.66 |
| Method | (s) | Peak VRAM (MBs) |
|---|---|---|
| SP Variant I, SSD, GN | 144.51 ± 5.87 | 5823 |
| SP Variant I, NCC, GN | 145.25 ± 6.93 | 5875 |
| SP Variant I, lNCC, GN | 169.02 ± 0.92 | 6159 |
| SP Variant I, NGFs, GD | 149.18 ± 1.04 | 5023 |
| SP Variant I, MI, GD | 347.35 ± 0.41 | 4997 |
| BL Variant I, SSD, GN | 77.44 ± 0.28 | 3263 |
| BL Variant I, NCC, GN | 79.92 ± 0.51 | 3279 |
| BL Variant I, lNCC, GN | 109.69 ± 1.45 | 3705 |
| BL Variant I, NGFs, GD | 132.41 ± 1.71 | 2945 |
| BL Variant I, MI, GD | 328.27 ± 0.47 | 2977 |
| SP Variant II, SSD, GN | 215.61 ± 1.66 | 5769 |
| SP Variant II, NCC, GN | 216.29 ± 3.25 | 5899 |
| SP Variant II, lNCC, GN | 238.49 ± 3.25 | 6065 |
| SP Variant II, NGFs, GD | 159.21 ± 1.58 | 4555 |
| SP Variant II, MI, GD | 354.55 ± 2.11 | 4555 |
| BL Variant II, SSD, GN | 100.07 ± 0.30 | 2271 |
| BL Variant II, NCC, GN | 100.21 ± 0.88 | 2557 |
| BL Variant II, lNCC, GN | 130.53 ± 1.01 | 2921 |
| BL Variant II, NGFs, GD | 138.28 ± 1.87 | 2389 |
| BL Variant II, MI, GD | 331.28 ± 1.87 | 2357 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hernandez, M.; Ramon-Julvez, U.; Sierra-Tome, D. Partial Differential Equation-Constrained Diffeomorphic Registration from Sum of Squared Differences to Normalized Cross-Correlation, Normalized Gradient Fields, and Mutual Information: A Unifying Framework. Sensors 2022, 22, 3735. https://doi.org/10.3390/s22103735
Hernandez M, Ramon-Julvez U, Sierra-Tome D. Partial Differential Equation-Constrained Diffeomorphic Registration from Sum of Squared Differences to Normalized Cross-Correlation, Normalized Gradient Fields, and Mutual Information: A Unifying Framework. Sensors. 2022; 22(10):3735. https://doi.org/10.3390/s22103735
Chicago/Turabian StyleHernandez, Monica, Ubaldo Ramon-Julvez, and Daniel Sierra-Tome. 2022. "Partial Differential Equation-Constrained Diffeomorphic Registration from Sum of Squared Differences to Normalized Cross-Correlation, Normalized Gradient Fields, and Mutual Information: A Unifying Framework" Sensors 22, no. 10: 3735. https://doi.org/10.3390/s22103735
APA StyleHernandez, M., Ramon-Julvez, U., & Sierra-Tome, D. (2022). Partial Differential Equation-Constrained Diffeomorphic Registration from Sum of Squared Differences to Normalized Cross-Correlation, Normalized Gradient Fields, and Mutual Information: A Unifying Framework. Sensors, 22(10), 3735. https://doi.org/10.3390/s22103735