
Applicability of Cost-Effective GNSS Sensors for Crustal Deformation Studies


Abstract
:1. Introduction
2. Data Acquisition and Processing
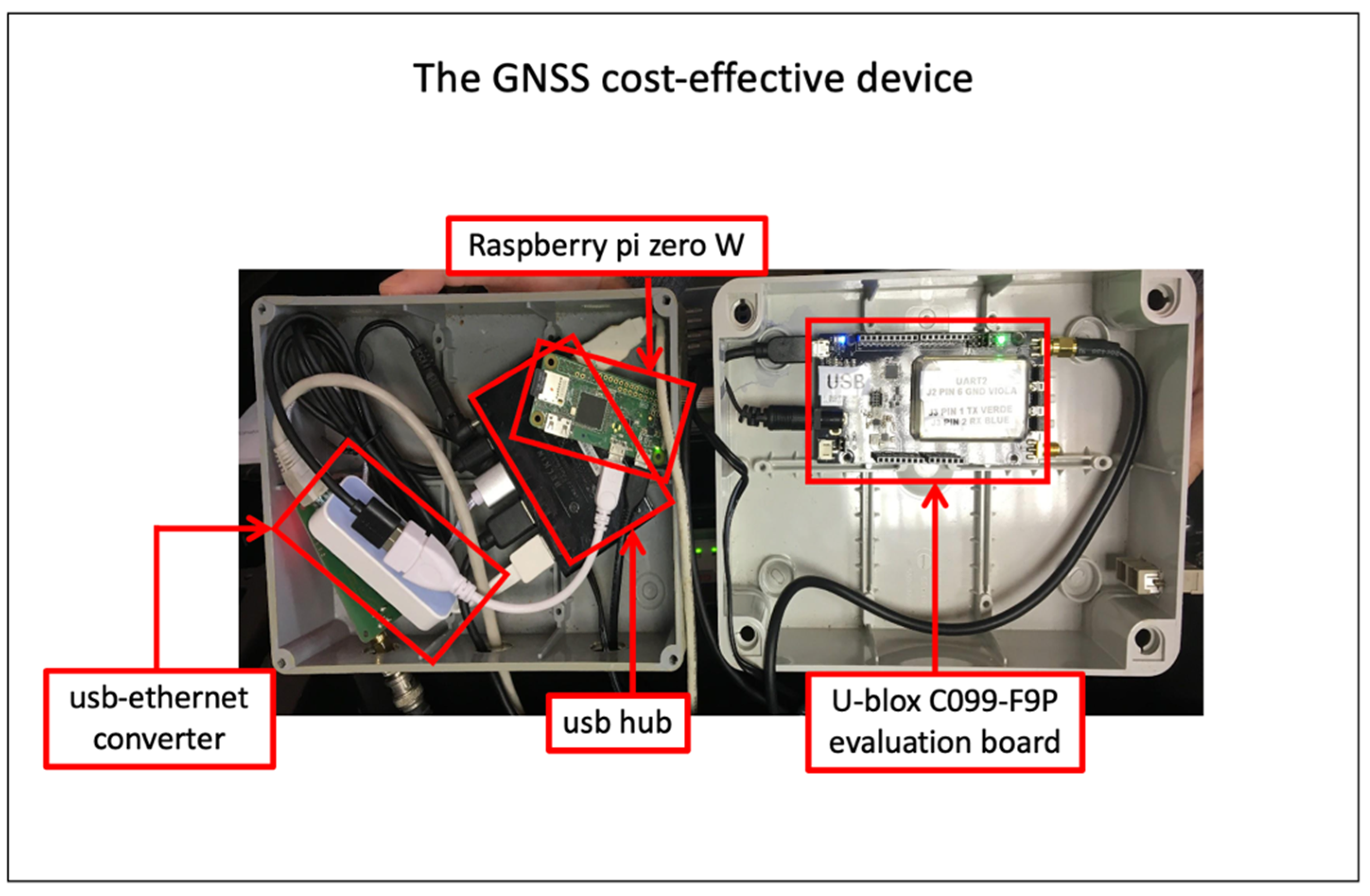
2.1. Instrumentation
2.2. Data Processing
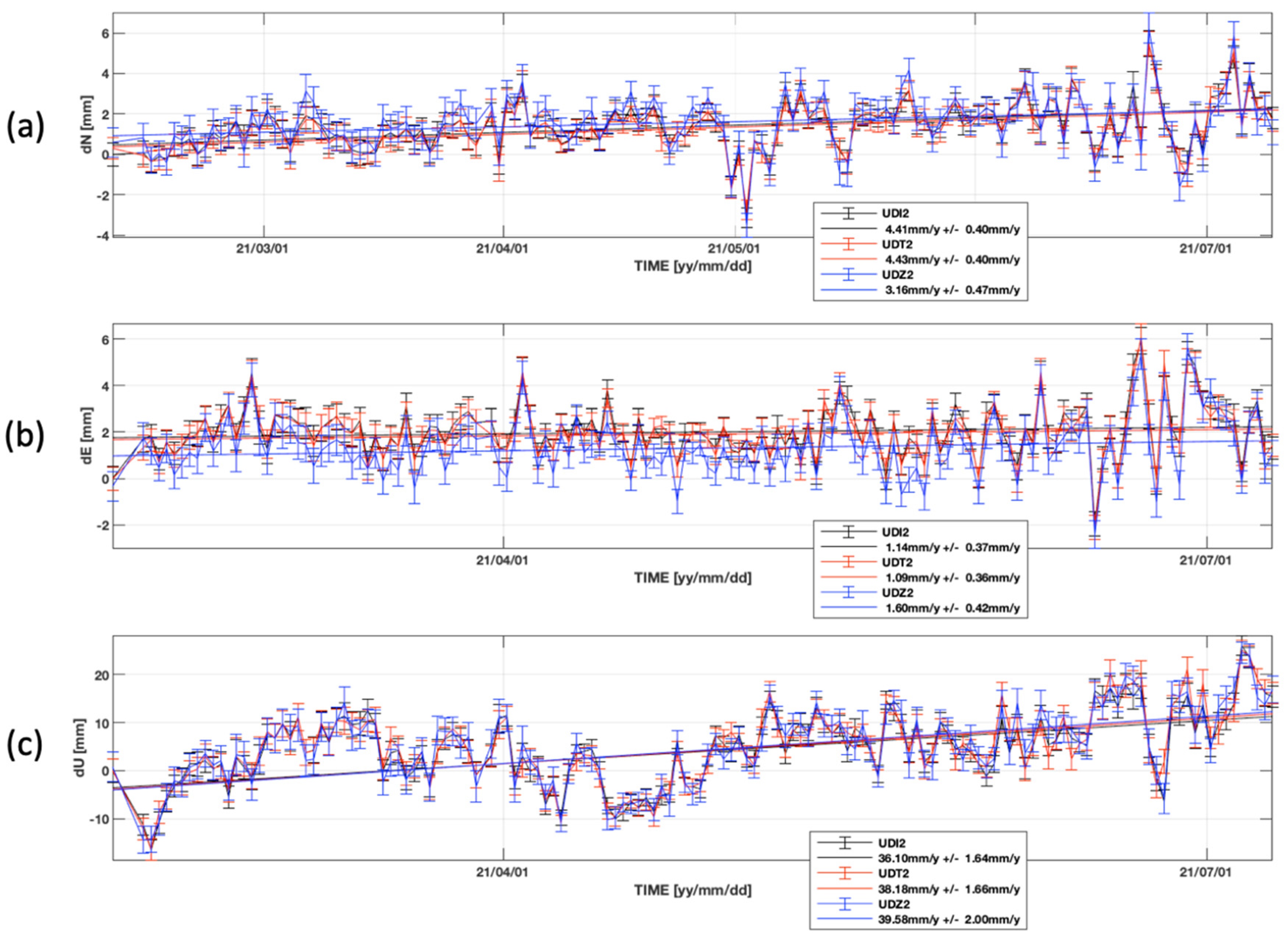
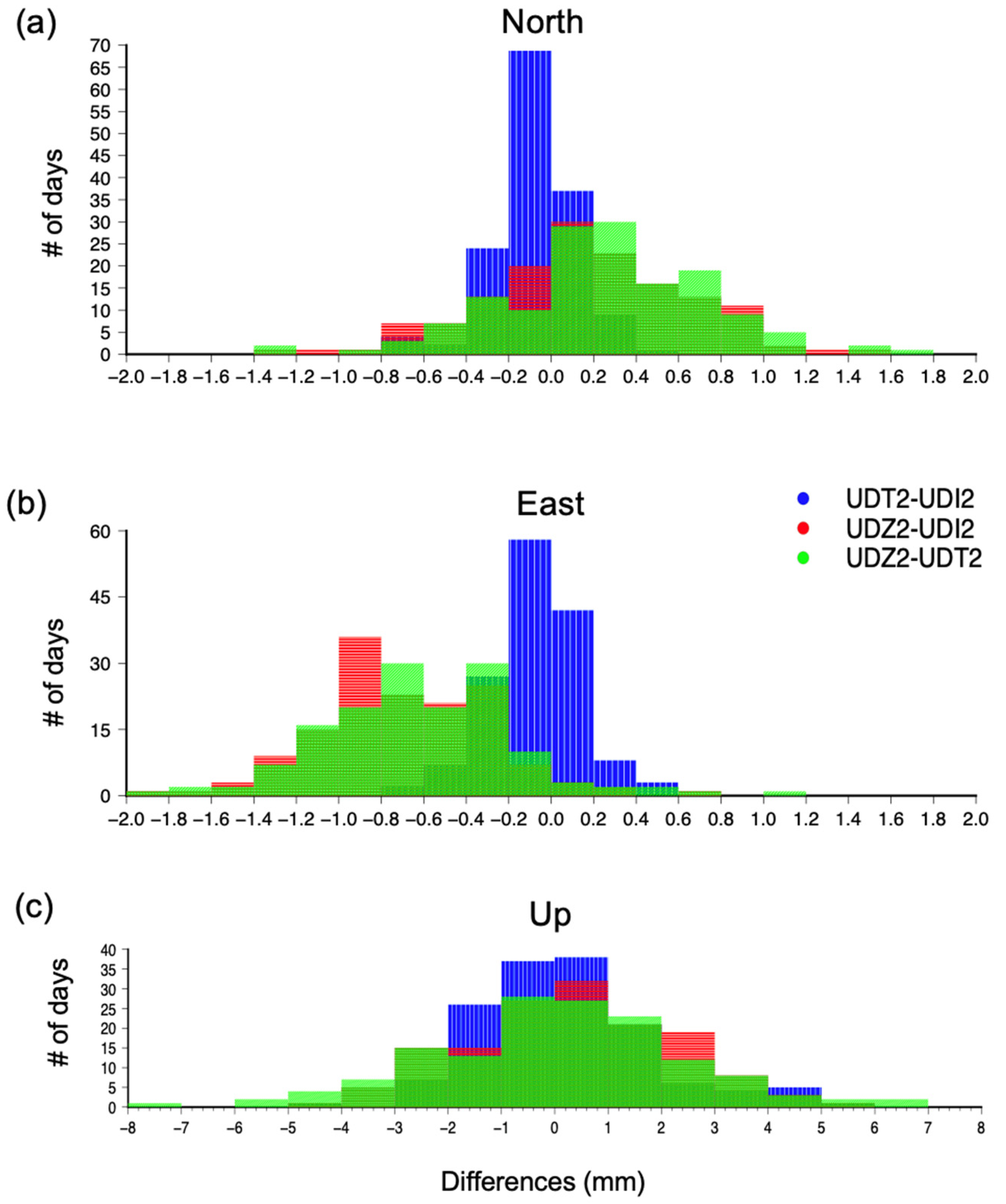
3. Results and Discussion
4. Concluding Remarks
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Janssen, V.; Rizos, C. A mixed-mode GPS network processing approach for deformation monitoring applications. Surv. Rev. 2003, 37, 2–19. [Google Scholar] [CrossRef]
- Squarzoni, C.; Delacourt, C.; Allemand, P. Differential single-frequency GPS monitoring of the La Valette landslide (French Alps). Eng. Geol. 2005, 79, 215–229. [Google Scholar] [CrossRef]
- Eyo, E.; Musa, T.; Omar, K.; Idris, K.M.; Bayrak, T.; Onuigbo, I. Application of low cost tools and techniques for landslide monitoring. In Landslide Science for a Safer Geoenvironment; Sassa, K., Canuti, P., Yin, Y., Eds.; Springer: Berlin/Heidelberg, Germany, 2014; Volume 2, pp. 557–562. [Google Scholar]
- Biagi, L.; Grec, F.; Negretti, M. Low-cost GNSS receivers for local monitoring: Experimental simulation, and analysis of displacements. Sensors 2016, 16, 2140. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Caldera, S.; Realini, E.; Barzaghi, R.; Reguzzoni, M.; Sansò, F. Experimental study on low-cost satellite-based geodetic monitoring over short baselines. J. Surv. Eng. 2016, 142, 04015016. [Google Scholar] [CrossRef]
- Hamza, V.; Stopar, B.; Ambrožič, T.; Turk, G.; Sterle, O. Testing Multi-Frequency Low-Cost GNSS Receivers for Geodetic Monitoring Purposes. Sensors 2020, 20, 4375. [Google Scholar] [CrossRef] [PubMed]
- Cina, A.; Piras, M. Performance of low-cost GNSS receiver for landslides monitoring: Test and results. Geomat. Nat. Haz. Risk 2015, 6, 497–514. [Google Scholar] [CrossRef]
- Tsakiri, M.; Sioulis, A.; Piniotis, G. Compliance of low-cost, single-frequency GNSS receivers to standards consistent with ISO for control surveying. Int. J. Metrol. Qual. Eng. 2017, 8, 11. [Google Scholar] [CrossRef] [Green Version]
- Poluzzi, L.; Tavasci, L.; Corsini, F.; Barbarella, M.; Gandolfi, S. Low-cost GNSS sensors for monitoring applications. Appl. Geomat. 2020, 12, 35–44. [Google Scholar] [CrossRef]
- Garrido-Carretero, M.S.; de Lacy-Pérez De Los Cobos, M.C.; Borque-Arancón, M.J.; Ruiz-Armenteros, A.M.; Moreno-Guerrero, R.; Gil-Cruz, A.J. Low-cost GNSS receiver in RTK positioning under the standard ISO-17123-8: A feasible option in geomatics. Measurement 2019, 137, 168–178. [Google Scholar] [CrossRef]
- Takasu, T.; Yasuda, A. Development of the low-cost RTK-GPS receiver with an open source program package RTKLIB. In Proceedings of the International Symposium on GPS/GNSS, International Convention Centre, Jeju, Korea, 4–6 November 2009; Available online: http://gpspp.sakura.ne.jp/paper2005/isgps_2009_rtklib_revA.pdf (accessed on 18 December 2015).
- Zuliani, D.; Bertoni, M.; Cristian Ponton, C.; Fabris, P.; Severin, M.; Ferin, G.; Rossi, G. GNSS single-frequency devices at OGS: LZER0 a cost-effective prototype. In Proceedings of the GNGTS Meeting, Trieste, Italy, 14–16 November 2017. [Google Scholar] [CrossRef]
- Zuliani, D.; Ponton, C. Tesi di Master Universitario di II livello di Master in Management of Research, Innovation and Technology “Organizzazione e Gestione di un Progetto per lo Sviluppo di un Prototipo GNSS Cost-Effective per Applicazioni Topografiche e Monitoraggio Strutturale. LZER0”, IV Edition. Master’s Thesis, Politecnico di Milano, Milan, Italy, 6 July 2017. [Google Scholar] [CrossRef]
- Zuliani, D.; Fabris, P.; Rossi, G. FReDNet: Evolution of permanent GNSS receiver system. In New Advanced GNSS and 3D Spatial Techniques Applications to Civil and Environmental Engineering, Geophysics, Architecture, Archeology and Cultural Heritage, Lecture Notes in Geoinformation and Cartography; Cefalo, R., Zieliński, J., Barbarella, M., Eds.; Springer: Cham, Switzerland, 2018; pp. 123–137. [Google Scholar]
- Bragato, P.L.; Comelli, P.; Saraò, A.; Zuliani, D.; Moratto, L.; Poggi, V.; Rossi, G.; Scaini, C.; Sugan, M.; Barnaba, C.; et al. The OGS-Northeastern Italy seismic and deformation network: Current status and outlook. Seismol. Res. Lett. 2021, 92, 1704–1716. [Google Scholar] [CrossRef]
- Herring, T.A.; King, R.; Floyd, M.A.; McClusky, S.C. GAMIT Reference Manual: GPS Analysis at MIT, Release 10.7; Department of Earth. Tech. Rep.; Massachusetts Institute of Technology: Cambridge, MA, USA, 2018; Available online: http://geoweb.mit.edu/gg/Intro_GG.pdf (accessed on 1 December 2021).
- Altamimi, Z.; Métivier, L.; Collilieux, X. ITRF2008 plate motion model. J. Geophys. Res. 2012, 117, B07402. [Google Scholar] [CrossRef]
- Rossi, G.; Zuliani, D.; Fabris, P. Long-term GNSS measurements from the northern Adria microplate reveal fault-induced fluid mobilization. Tectonophysics 2016, 690, 142–159. [Google Scholar] [CrossRef]
- Bechtold, M.; Zuliani, D.; Fabris, P.; Tanner, D.C. Global Positioning System Constraints on Plate Kinematics in the Southern Alps at the Nubia-Eurasia Boundary. In Global Positioning Systems; Asphaug, V., Sørensen, E., Eds.; Nova Science Publishers, Inc.: New York, NY, USA, 2010; Chapter 117–156. [Google Scholar]
- Caporali, A.; Neubauer, F.; Ostini, L.; Stangl, G.; Zuliani, D. Modeling surface GPS velocities in the Southern and Eastern Alps by finite dislocations at crustal depths. Tectonophysics 2013, 590, 136–150. [Google Scholar] [CrossRef]
- Serpelloni, E.; Vannucci, G.; Anderlini, L.; Bennett, R.A. Kinematics, seismotectonics and seismic potential of the eastern sector of the European Alps from GPS and seismic deformation data. Tectonophysics 2016, 688, 157–181. [Google Scholar] [CrossRef]
- Devoti, R.; d’Agostino, N.; Serpelloni, E.; Pietrantonio, G.; Riguzzi, F.; Avallone, A.; Cavaliere, A.; Cheloni, D.; Cecere, G.; d’Ambrosio, C.; et al. A combined velocity field of the Mediterranean region. Ann. Geophys. 2017, 60. [Google Scholar] [CrossRef] [Green Version]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Receiver Type | Indicative Price * (EUR) | Satellite Constellations Tracked | Carrier Frequency | GNSS Channels # | Maximum Sampling Rate |
|---|---|---|---|---|---|
| GNSS cost-effective device | ~1000 | GPS, GLONASS, GALILEO, Beidou, QZSS, SBAS | GPS: L1C/A, L2C GLONASS: L1OF, L2OF; GALILEO: E1B/C, E5b; Beidou: B1I, B2I; QZSS: L1C/A, L1S, L2; SBAS: L1C/A | 184 | 20 Hz |
| Topcon TPS NETG5 | ~10,000 | GPS, GLONASS, GALILEO, Beidou, SBAS, QZSS | GPS: L1 C/A, L1C, L1P(Y), L2P(Y), L2C, L5; GLONASS: L1 C/A, L1P, L2 C/A, L2P, L3C; GALILEO: GIOVE-A/B, E1b, E1, E5a, E5b, E6, AltBOC; Beidou: B1, B2, B3; SBAS: WAAS/EGNOS/MSAS; QZSS: L1 C/A, L1C, L2C, L5, LEX | 452 | 100 Hz |
| Leica GR25 | ~10,000 | GPS, GLONASS, GALILEO, Beidou, SBASS, QZSS, IRNSS | GPS: L1, L2P(Y), L2C, L5; GLONASS: L1, L2P, L2C, L3; GALILEO: E1, E5a, E5b, AltBOC, E6; Beidou: B1, B2, B3; SBAS: WAAS/EGNOS/MSAS/GAGAN; QZSS: L1, L2C, L5; IRNSS: L5 | 555 | 50 Hz |
| Site 1 (Receiver Type) | Site 2 (Receiver Type) | Displacement Component | Maximum Difference Range (mm) | Mean (mm) | STD (mm) |
|---|---|---|---|---|---|
| UDT2 (TPS NETG5) | UDI2 (Leica GR25) | dN | 0.74 | −0.09 | 0.19 |
| UDT2 (TPS NETG5) | UDI2 (Leica GR25) | dE | 0.63 | −0.09 | 0.21 |
| UDT2 (TPS NETG5) | UDI2 (Leica GR25) | dU | 8.28 | 0.25 | 1.76 |
| UDZ2 (u-blox F9P) | UDI2 (Leica GR25) | dN | 1.54 | 0.17 | 0.48 |
| UDZ2 (u-blox F9P) | UDI2 (Leica GR25) | dE | 1.81 | −0.69 | 0.40 |
| UDZ2 (u-blox F9P) | UDI2 (Leica GR25) | dU | 5.02 | 0.29 | 1.92 |
| UDZ2 (u-blox F9P) | UDT2 (TPS NETG5) | dN | 1.76 | 0.25 | 0.49 |
| UDZ2 (u-blox F9P) | UDT2 (TPS NETG5) | dE | 1.89 | −0.6 | 0.45 |
| UDZ2 (u-blox F9P) | UDT2 (TPS NETG5) | dU | 7.68 | 0.03 | 2.41 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Tunini, L.; Zuliani, D.; Magrin, A. Applicability of Cost-Effective GNSS Sensors for Crustal Deformation Studies. Sensors 2022, 22, 350. https://doi.org/10.3390/s22010350
Tunini L, Zuliani D, Magrin A. Applicability of Cost-Effective GNSS Sensors for Crustal Deformation Studies. Sensors. 2022; 22(1):350. https://doi.org/10.3390/s22010350
Chicago/Turabian StyleTunini, Lavinia, David Zuliani, and Andrea Magrin. 2022. "Applicability of Cost-Effective GNSS Sensors for Crustal Deformation Studies" Sensors 22, no. 1: 350. https://doi.org/10.3390/s22010350
APA StyleTunini, L., Zuliani, D., & Magrin, A. (2022). Applicability of Cost-Effective GNSS Sensors for Crustal Deformation Studies. Sensors, 22(1), 350. https://doi.org/10.3390/s22010350