
Physical Distancing Device with Edge Computing for COVID-19 (PADDIE-C19)





Abstract
:1. Introduction
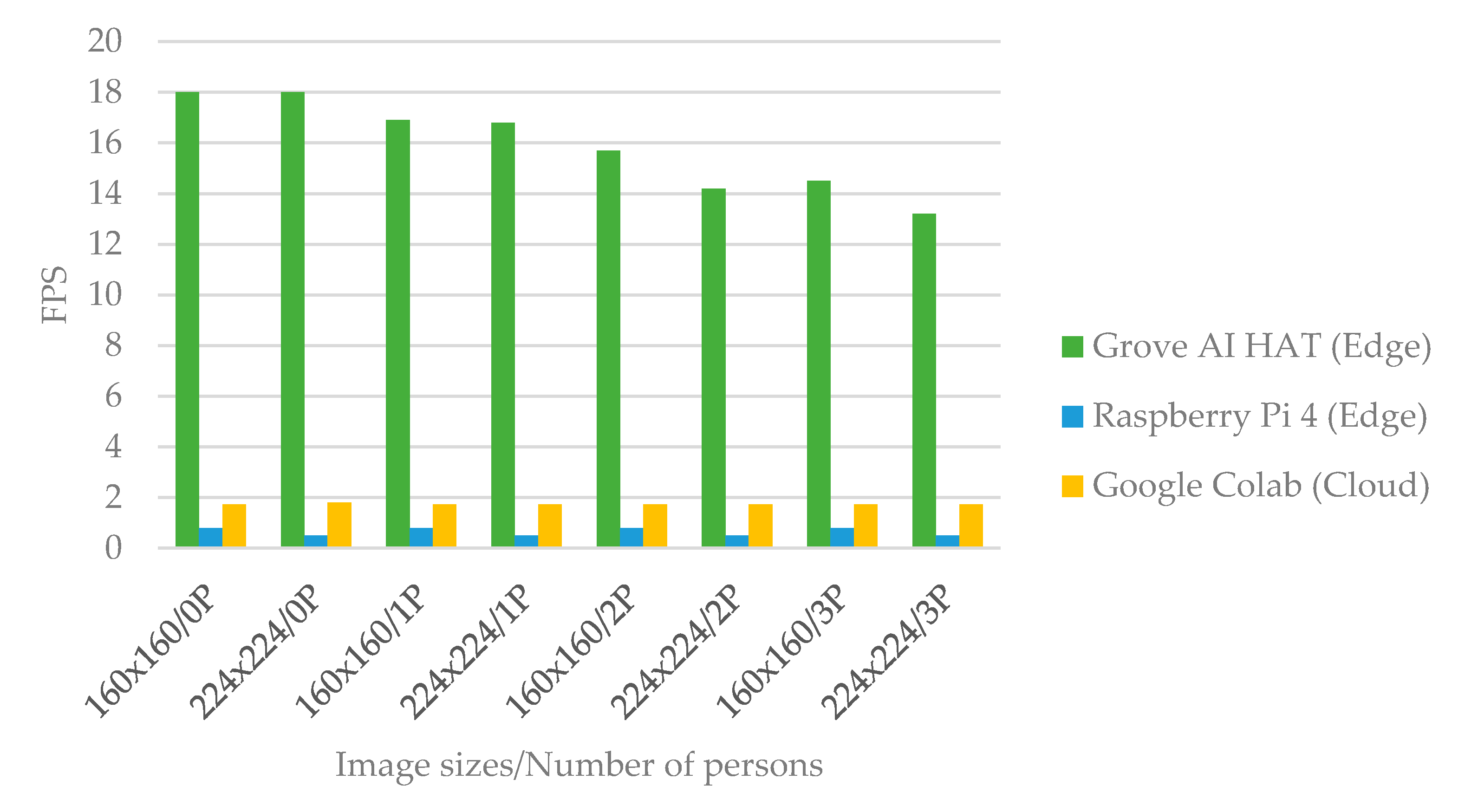
- A PADDIE-C19 prototype based on Raspberry-pi Grove Artificial Intelligence Hardware Attached on Top (Grove AI HAT) with edge computing capability to recognize and classify humans based on image processing. The performance of the person detector system implemented on the Grove AI HAT, Raspberry Pi 4 and Google Colab platform on different mobile networks was evaluated and compared based on frames per second (FPS) and execution time to compare the performance between edge and cloud computing approaches.
- A physical distance monitoring algorithm and implementation technique to operate in low-energy edge computing devices that provide physical distance guidance to the public.
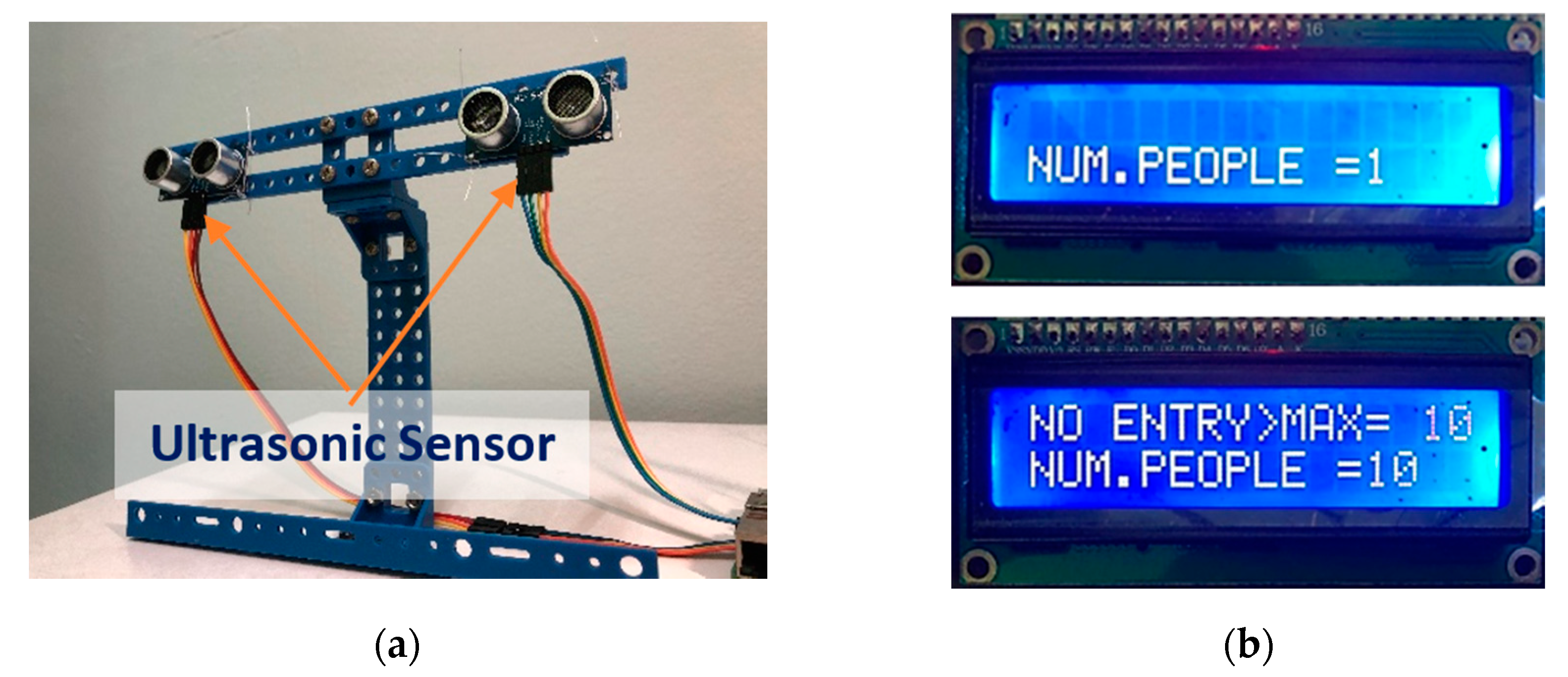
- An accurate sensor platform design for forehead temperature measurement and person counting to manage the flow of visitors in public spaces.
2. Problem Background
3. Related Works
4. Methodology
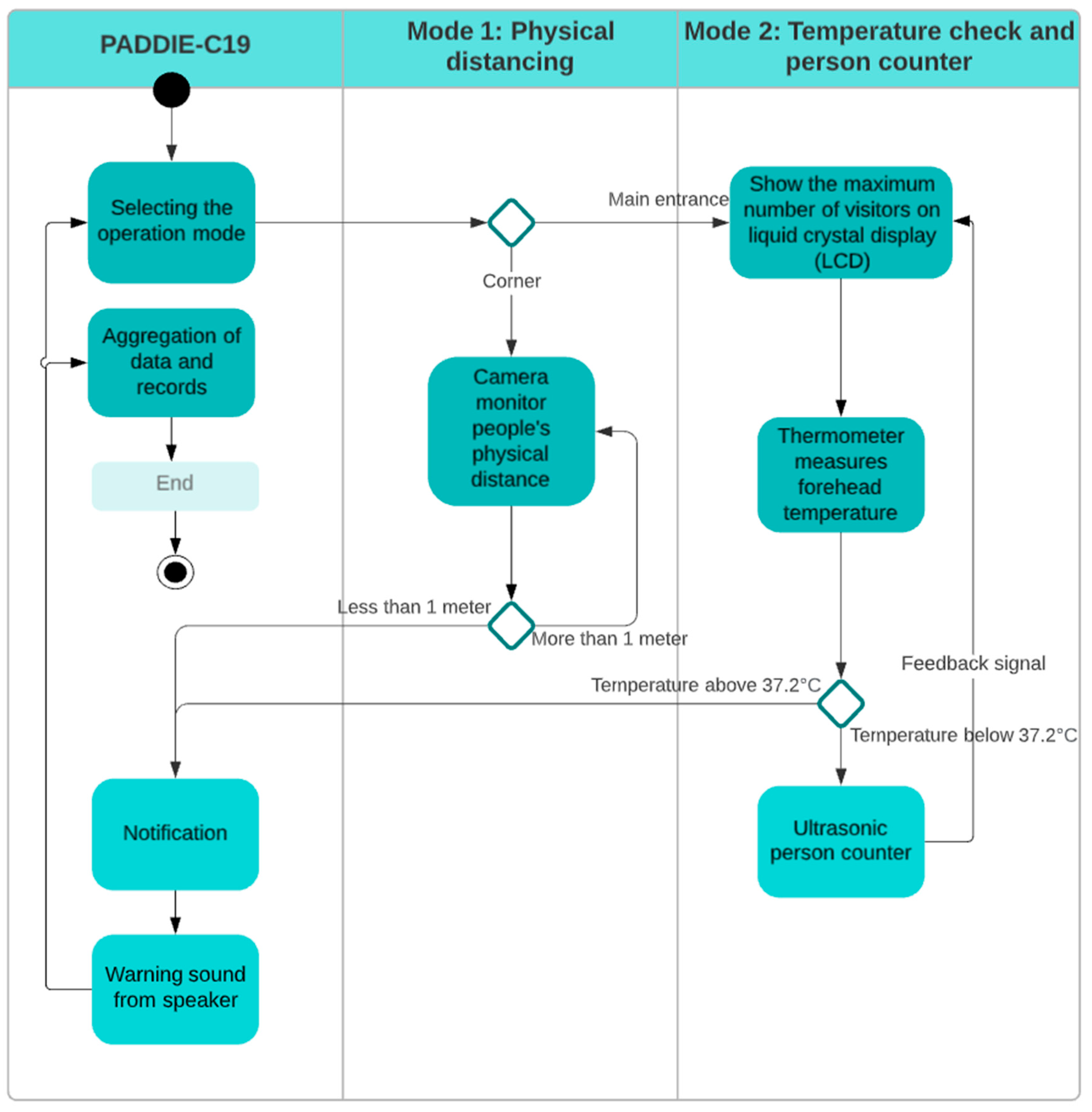
4.1. PADDIE-C19 System’s Flow Chart
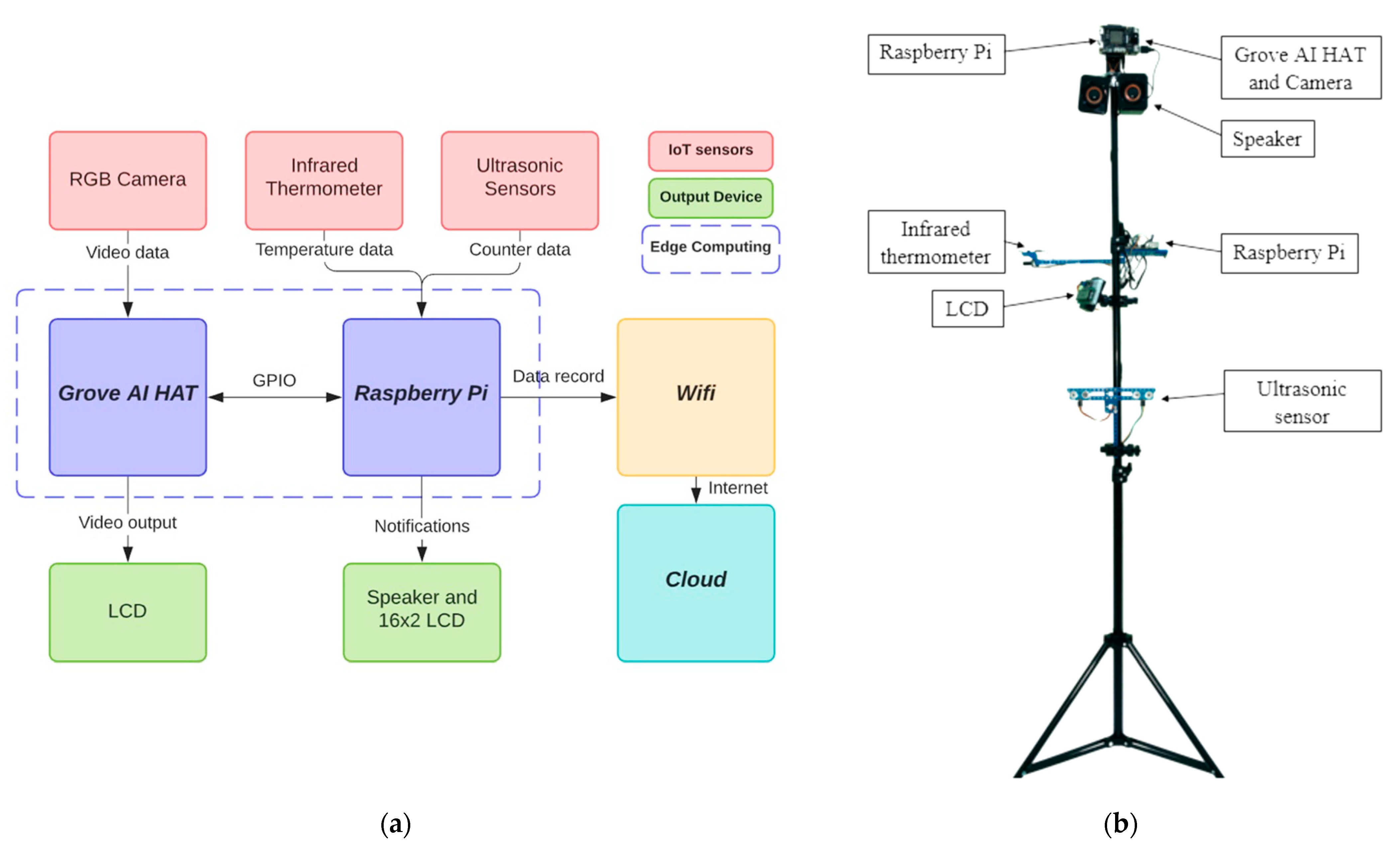
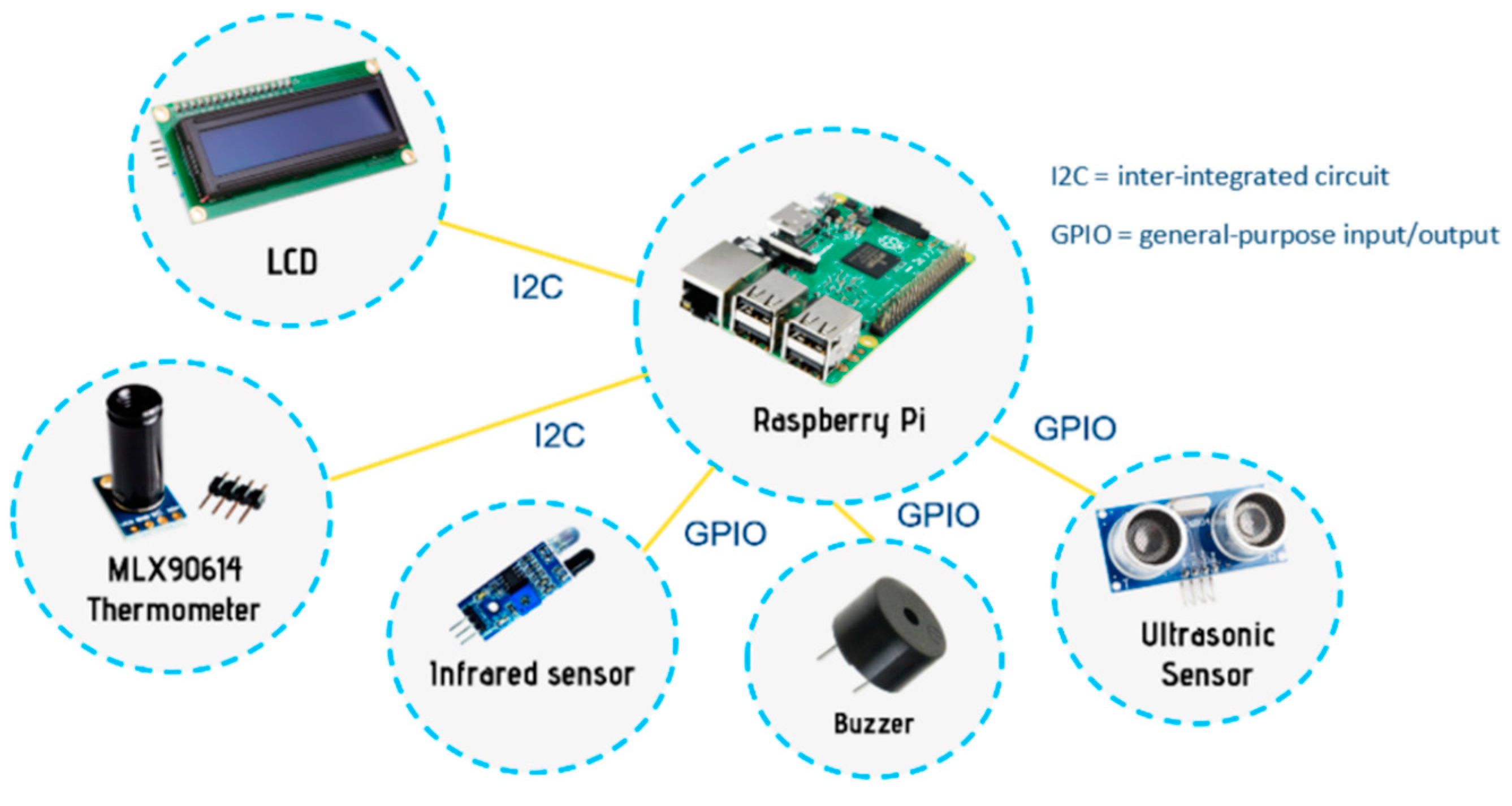
4.2. PADDIE-C19 Block Diagram
| Algorithm 1. Physical Distancing Monitoring. |
| Input: Vn: Video V containing N number of frames of size 160*160/[0P,1P,2P] 224*224/[0P,1P,2P] Output: D: Safe and unsafe Distance vector between two objects Initialize Parameter: Distance_Threshold = 100 cm, Temp_Threshold = 37.2, Visitor_Count = 0, Max_Visitor = 15, Function1 Physical distancing () Select = human_detection_framework For () in range (Human_Count) // person detection for each frame in video For x in range(x): // number of person more than 1 D = √((x_2 − x_1)^2 + (y_2 − y_1)^2 // calculate constant, k = (actual distance, cm)/(pixel distance) If D <= Distance_Threshod: // less than 1 m Send notification // output from speaker EndIF Endfor Endfor EndFunction1 Function2 Temperature check and person counter For number of Visitor_Count <= Max_Visitor, Show max number of visitors For (temp_Threshold < 37.2) in range (Visitor_Count) For x in range (x): If proximity sensor detected object at 3 cm distance // calculate forehead temperature if Temp_Threshold < 37.2 Pass Else Display: fever no entry EndIF EndIF EndFor EndFor EndFunction2 |
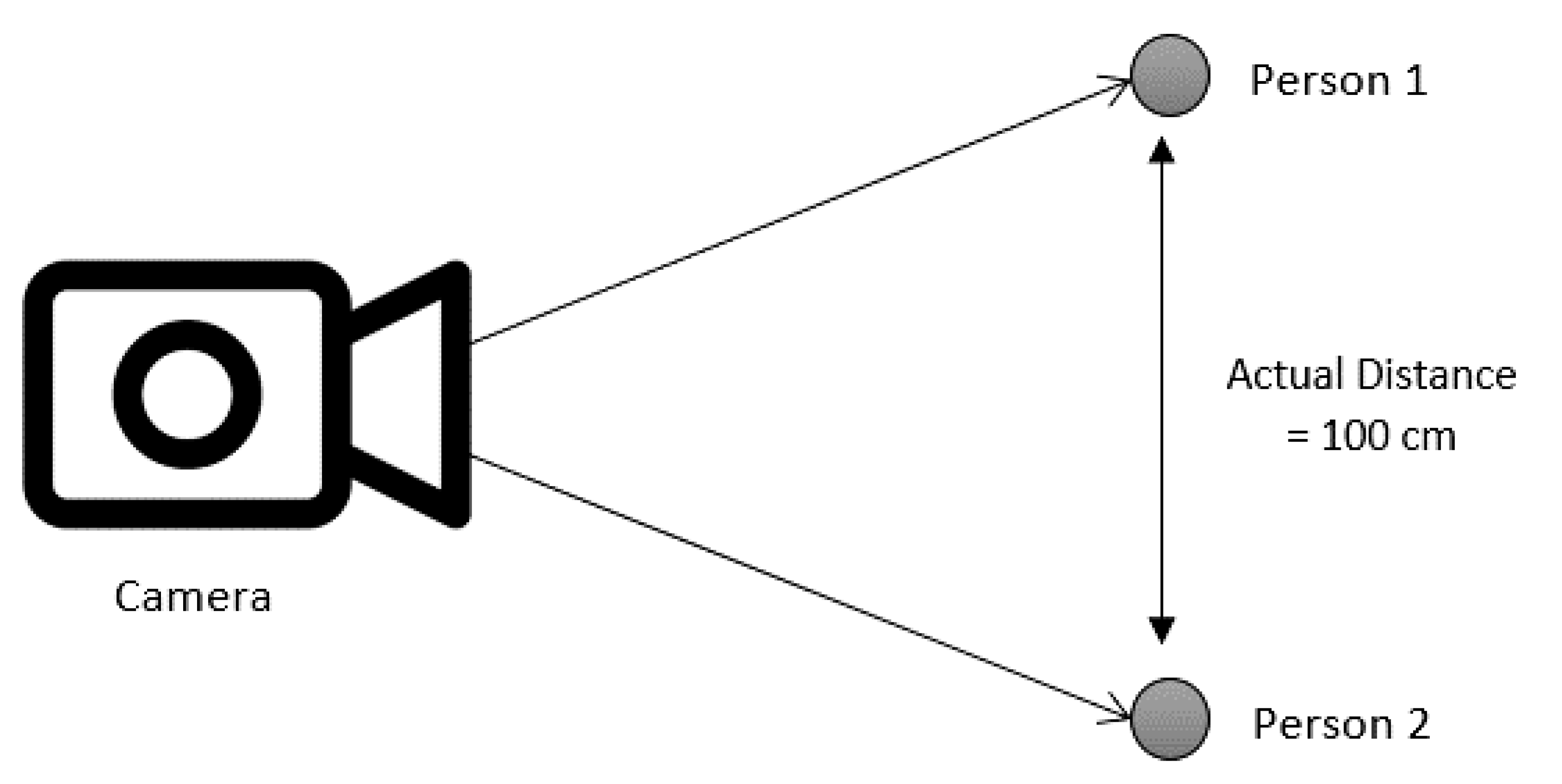
4.3. Physical Distancing Implementation Steps
4.4. System Evaluation Metrics
5. Results and Discussions
5.1. FPS Comparison between Edge and Cloud
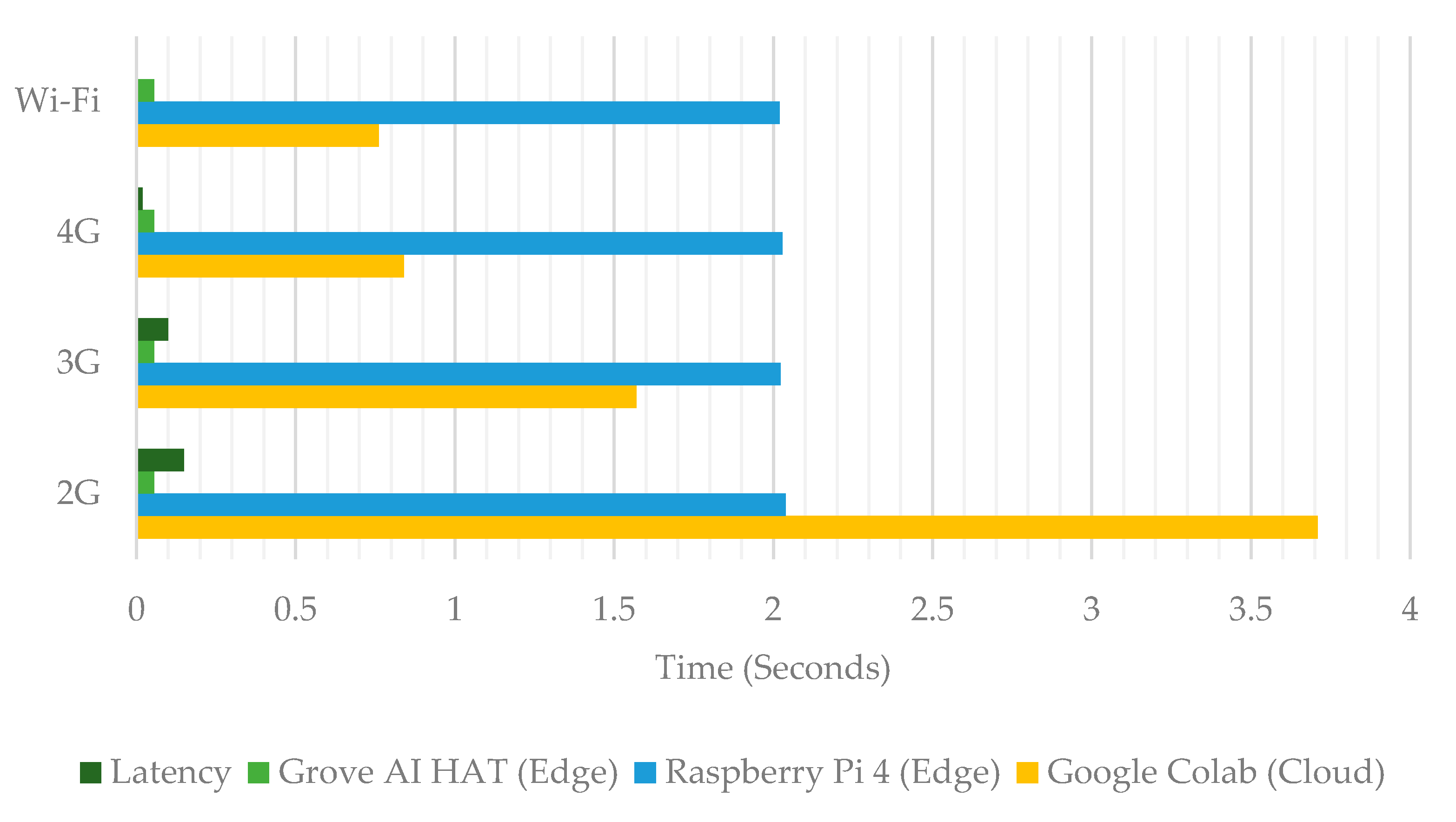
5.2. Execution Time in Different Networks
5.3. Performance of Person Detector
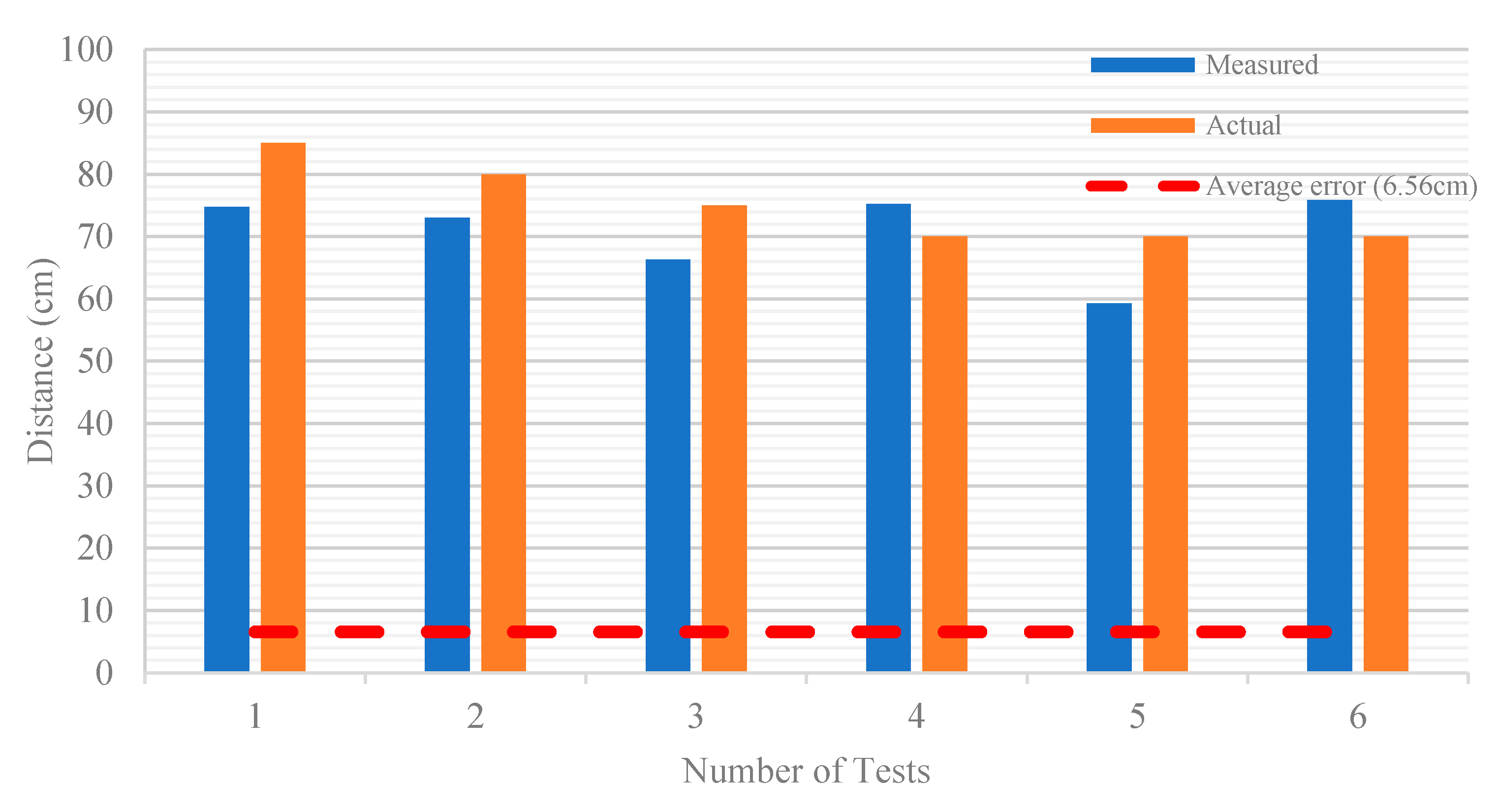
5.4. Distance Test
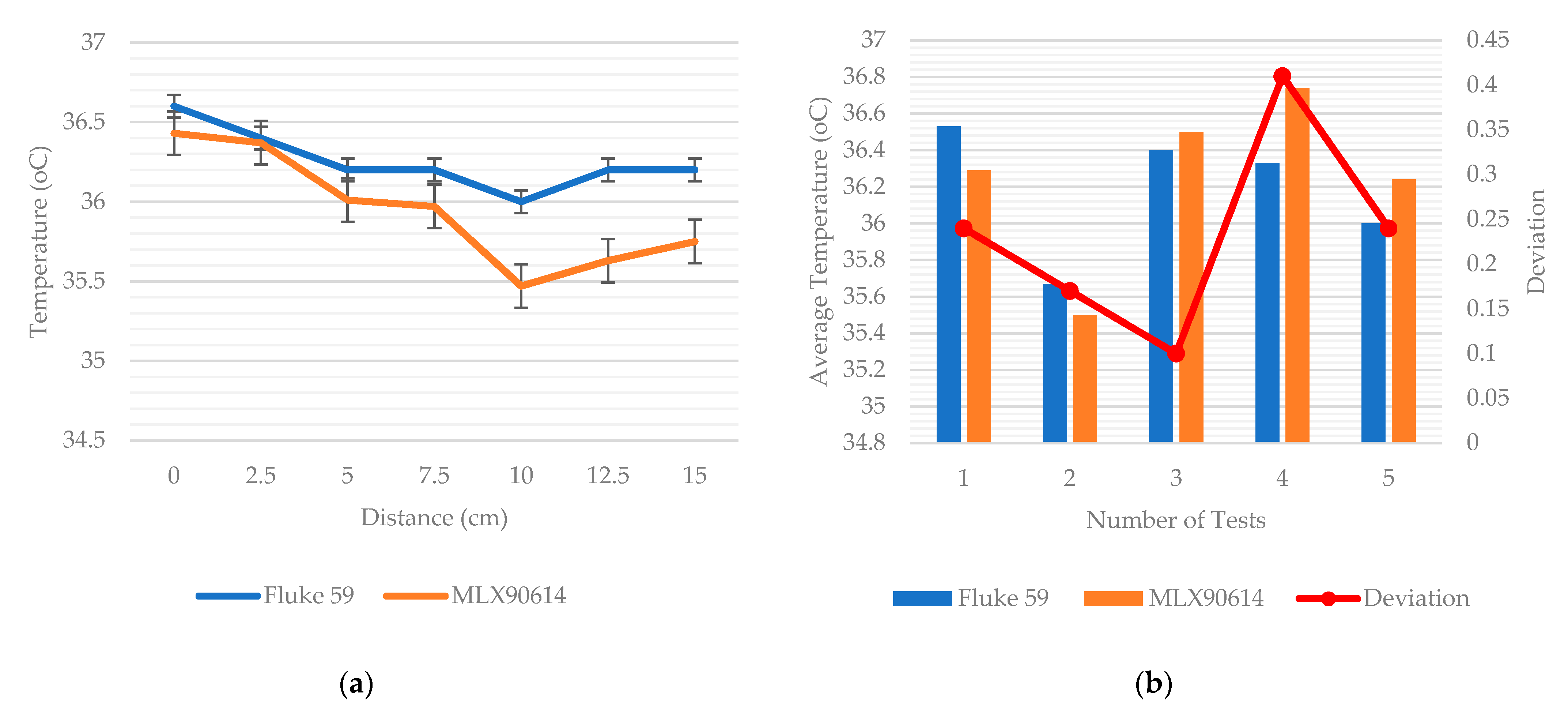
5.5. Comparison between MLX90614 and Fluke 59 Thermometer
5.6. Person Counter
5.7. Summary of PADDIE-C19 Performance
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Law, T. 2 Million People Have Died From COVID-19 Worldwide. Time, 15 January 2021. [Google Scholar]
- WHO. Coronavirus Disease (COVID-19) Advice for the Public; WHO: Geneva, Switzerland, 2021. [Google Scholar]
- Shah, A.U.M.; Safri, S.N.A.; Thevadas, R.; Noordin, N.K.; Rahman, A.A.; Sekawi, Z.; Ideris, A.; Sultan, M.T.H. COVID-19 outbreak in Malaysia: Actions taken by the Malaysian government. Int. J. Infect. Dis. 2020, 97, 108–116. [Google Scholar] [CrossRef] [PubMed]
- Abdali, T.-A.N.; Hassan, R.; Aman, A.H.M. A new feature in mysejahtera application to monitoring the spread of COVID-19 using fog computing. In Proceedings of the 2021 3rd International Cyber Resilience Conference (CRC), Virtual Conference, 29–31 January 2021; IEEE: New York, NY, USA, 2021; pp. 1–4. [Google Scholar]
- Albayati, A.; Abdullah, N.F.; Abu-Samah, A.; Mutlag, A.H.; Nordin, R. A Serverless Advanced Metering Infrastructure Based on Fog-Edge Computing for a Smart Grid: A Comparison Study for Energy Sector in Iraq. Energies 2020, 13, 5460. [Google Scholar] [CrossRef]
- Abdali, T.-A.N.; Hassan, R.; Aman, A.H.M.; Nguyen, Q.N. Fog Computing Advancement: Concept, Architecture, Applications, Advantages, and Open Issues. IEEE Access 2021, 9, 75961–75980. [Google Scholar] [CrossRef]
- Garg, L.; Chukwu, E.; Nasser, N.; Chakraborty, C.; Garg, G. Anonymity Preserving IoT-Based COVID-19 and Other Infectious Disease Contact Tracing Model. IEEE Access 2020, 8, 159402–159414. [Google Scholar] [CrossRef] [PubMed]
- Ng, P.C.; Spachos, P.; Plataniotis, K.N. COVID-19 and Your Smartphone: BLE-based Smart Contact Tracing. IEEE Syst. J. 2021, 15, 5367–5378. [Google Scholar] [CrossRef]
- Bian, S.; Zhou, B.; Lukowicz, P. Social distance monitor with a wearable magnetic field proximity sensor. Sensors 2020, 20, 5101. [Google Scholar] [CrossRef] [PubMed]
- Nadikattu, R.R.; Mohammad, S.M.; Whig, P. Novel economical social distancing smart device for covid19. Int. J. Electr. Eng. Technol. 2020, 11, 204–217. [Google Scholar] [CrossRef]
- Sathyamoorthy, A.J.; Patel, U.; Savle, Y.A.; Paul, M.; Manocha, D. COVID-Robot: Monitoring social distancing constraints in crowded scenarios. arXiv 2020, arXiv:2008.06585. [Google Scholar]
- Rezaei, M.; Azarmi, M. Deepsocial: Social distancing monitoring and infection risk assessment in covid-19 pandemic. Appl. Sci. 2020, 10, 7514. [Google Scholar] [CrossRef]
- Nguyen, C.T.; Saputra, Y.M.; Van Huynh, N.; Nguyen, N.T.; Khoa, T.V.; Tuan, B.M.; Nguyen, D.N.; Hoang, D.T.; Vu, T.X.; Dutkiewicz, E.; et al. A Comprehensive Survey of Enabling and Emerging Technologies for Social Distancing—Part I: Fundamentals and Enabling Technologies. IEEE Access 2020, 8, 153479–153507. [Google Scholar] [CrossRef] [PubMed]
- Goggin, G. COVID-19 apps in Singapore and Australia: Reimagining healthy nations with digital technology. Media Int. Aust. 2020, 177, 61–75. [Google Scholar] [CrossRef]
- Azlan, A.A.; Hamzah, M.R.; Sern, T.J.; Ayub, S.H.; Mohamad, E. Public knowledge, attitudes and practices towards COVID-19: A cross-sectional study in Malaysia. PLoS ONE 2020, 15, e0233668. [Google Scholar] [CrossRef]
- Idris, M.N.M. 606 Kompaun Langgar SOP di Selangor. Utusan Malaysia, 10 December 2020. [Google Scholar]
- WHO. COVID-19 Significantly Impacts Health Services for Noncommunicable Diseases; WHO: Geneva, Switzerland, 2020. [Google Scholar]
- Mohsin, J.; Saleh, F.H.; Al-muqarm, A.M.A. Real-time Surveillance System to detect and analyzers the Suspects of COVID-19 patients by using IoT under edge computing techniques (RS-SYS). In Proceedings of the 2020 2nd Al-Noor International Conference for Science and Technology (NICST), Baku, Azerbaijan, 28–30 August 2020; IEEE: New York, NY, USA, 2020. [Google Scholar]
- Ranaweera, P.S.; Liyanage, M.; Jurcut, A.D. Novel MEC based Approaches for Smart Hospitals to Combat COVID-19 Pandemic. IEEE Consum. Electron. Mag. 2020, 10, 80–91. [Google Scholar] [CrossRef]
- Hegde, C.; Jiang, Z.; Suresha, P.B.; Zelko, J.; Seyedi, S.; Smith, M.; Wright, D.; Kamaleswaran, R.; Reyna, M.; Clifford, G. AutoTriage—An Open Source Edge Computing Raspberry Pi-based Clinical Screening System. medRxiv 2020, 1–13. [Google Scholar] [CrossRef]
- Saponara, S.; Elhanashi, A.; Gagliardi, A. Implementing a real-time, AI-based, people detection and social distancing measuring system for Covid-19. J. Real-Time Image Process. 2021, 18, 1937–1947. [Google Scholar] [CrossRef] [PubMed]
- Rahim, A.; Maqbool, A.; Rana, T. Monitoring social distancing under various low light conditions with deep learning and a single motionless time of flight camera. PLoS ONE 2021, 16, e0247440. [Google Scholar] [CrossRef] [PubMed]
- Shen, Y.; Guo, D.; Long, F.; Mateos, L.A.; Ding, H.; Xiu, Z.; Hellman, R.B.; King, A.; Chen, S.; Zhang, C.; et al. Robots under COVID-19 Pandemic: A Comprehensive Survey. IEEE Access 2021, 9, 1590–1615. [Google Scholar] [CrossRef]
- Redmon, J.; Farhadi, A. YOLO9000: Better, faster, stronger. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Honolulu, HI, USA, 21–26 July 2017; pp. 7263–7271. [Google Scholar]
- Bochkovskiy, A.; Wang, C.-Y.; Liao, H.-Y.M. Yolov4: Optimal speed and accuracy of object detection. arXiv 2020, arXiv:2004.10934. [Google Scholar]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| References | Contribution |
|---|---|
| [18] | A real-time patient monitoring system that reduces energy usage, data upload cost and delay between sensor transmission and reception. |
| [19] | Proposed for health services and mobile edge computing (MEC) to deliver augmented reality (AR)-based remote surgery with latency in microseconds and bandwidth over 30 Gbps. |
| [20] | Edge-computing system that detects fever and cyanosis to relieve staff overload. The developmental test results showed a 97% accuracy in detecting fever and 77% in detecting cyanosis. |
| Technology | Hardware | Advantage | Limitation |
|---|---|---|---|
| Wireless communication | Radio frequency identification (RFID) [7] | - Quick response within 1 s - $1.95 cost per unit | Body contacts detection but does not offer accurate distance measurement between users |
| Bluetooth [8] | - Real-time physical distance warning with over 80% accuracy | Detection relies on the person who installs the app, but the battery drains quickly | |
| Electromagnetic | Magnetic field [9] | - Capable of detecting objects at a distance of 2 m without interference | The device is large and not portable |
| Passive infrared [10] | - 240° detection angle with physical distance alerts | Obstacles easily disrupt the infrared rays | |
| Computer vision | Camera and Lidar [11] | - Robots can identify and track individuals who fail to keep a physical distance | Unable to distinguish between family members and strangers |
| Camera [12] | - The system achieves an average accuracy of 99.8% with 24.1 frames per second (FPS) | The location of the camera affects the detection accuracy |
| References | Method | Result | Limitation |
|---|---|---|---|
| [21] | Thermal cameras and Nvidia Jetson Nano are used to monitor people’s physical distances. | The object detector with Dataset I achieves 95.6% accuracy and 27 FPS with the proposed approach. | There is no temperature screening for fever individuals. |
| [22] | Individuals’ physical distances are monitored using a ToF (time-of-flight) camera and the YOLOv4 model. | The suggested model’s mAP (mean average precision) score is 97.84% and the MAE (mean absolute error) between real and measured physical distance is 1.01 cm. | Experiments were carried out with the Tesla T4 graphics processing unit (GPU), which has large power consumption and is not portable. |
| [23] | Automatic patrol robots that monitor people’s physical distances and face masks. | A patrol robot equipped with a camera and speaker to promote physical distancing and mask wearing. | Not suitable for use in small spaces or indoors. |
| Class | Sources | Size | Description |
|---|---|---|---|
| Person | Kaggle Dataset | 785 | A person was walking on the road. |
| CUHK Person Dataset | 3840 | Walking pedestrians at a various angle. | |
| Google Open Images | 1007 | Randomly sampled person from different backgrounds. |
| Raspberry Pi 4 (Edge) | Grove AI HAT (Edge) | Google Colab (Cloud) | |
|---|---|---|---|
| Processor | ARM Cortex-72 | M1 K210 RISC-V | Dual Intel Xeon |
| Clock (GHz) | 1.5 | 0.4–0.6 | 2.2 |
| RAM (GB) | 4 | 0.008 | 13.3 |
| AI Resources | - | KPU | Tesla T4 |
| Language | Python | MicroPython | Python |
| Model | YOLOv4 | kmodel | YOLOv4 |
| Network | Download | Upload | Latency |
|---|---|---|---|
| Wi-Fi | 30 Mbps | 15 Mbps | 5 ms |
| 4G | 4 Mbps | 3 Mbps | 20 ms |
| 3G | 750 kbps | 250 kbps | 100 ms |
| 2G | 200 kbps | 100 kbps | 150 ms |
| Grove AI HAT Confusion Matrix | ||||
|---|---|---|---|---|
| Predicted Class | ||||
| Person | No person | Recall | ||
| Actual class | Person | 32 | 12 | 0.7273 |
| No person | 6 | 21 | 0.7778 | |
| Precision | 0.8421 | 0.6364 | Accuracy = 0.7465 | |
| Google Colab Confusion Matrix | ||||
|---|---|---|---|---|
| Predicted Class | ||||
| Person | No person | Recall | ||
| Actual class | Person | 38 | 1 | 0.9744 |
| No person | 2 | 25 | 0.9259 | |
| Precision | 0.95 | 0.9615 | Accuracy = 0.9545 | |
| Actual Physical Distance | Camera Distance | Pixel | Constant, k |
|---|---|---|---|
| 100 cm | 200 cm | 127 | 0.7874 |
| 100 cm | 300 cm | 101 | 0.9901 |
| 100 cm | 400 cm | 54 | 1.8519 |
| Feature | Evaluation Metrics | Experimental Result |
|---|---|---|
| Grove AI HAT with edge computing | Frame per second (FPS) | Grove AI HAT achieves the average performance of 18 FPS with a person detector (kmodel). |
| Average execution time | Second (s) | The average execution time is 56 ms in different networks. |
| Person detector | Classifier accuracy | The accuracy of kmodel to distinguish person class is 74.65%. |
| Physical distancing | Centimeter (cm) | The average absolute in measuring distance is 8.95 cm. |
| MLX90614 Thermometer | Celsius (°C) | The systematic error in measuring forehead and ambient temperatures is less than 0.5 °C. |
| Person counter | Hertz (Hz) | The refresh rate in detecting a person is 9.8 Hz. |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Loke, C.H.; Adam, M.S.; Nordin, R.; Abdullah, N.F.; Abu-Samah, A. Physical Distancing Device with Edge Computing for COVID-19 (PADDIE-C19). Sensors 2022, 22, 279. https://doi.org/10.3390/s22010279
Loke CH, Adam MS, Nordin R, Abdullah NF, Abu-Samah A. Physical Distancing Device with Edge Computing for COVID-19 (PADDIE-C19). Sensors. 2022; 22(1):279. https://doi.org/10.3390/s22010279
Chicago/Turabian StyleLoke, Chun Hoe, Mohammed Sani Adam, Rosdiadee Nordin, Nor Fadzilah Abdullah, and Asma Abu-Samah. 2022. "Physical Distancing Device with Edge Computing for COVID-19 (PADDIE-C19)" Sensors 22, no. 1: 279. https://doi.org/10.3390/s22010279
APA StyleLoke, C. H., Adam, M. S., Nordin, R., Abdullah, N. F., & Abu-Samah, A. (2022). Physical Distancing Device with Edge Computing for COVID-19 (PADDIE-C19). Sensors, 22(1), 279. https://doi.org/10.3390/s22010279