
A Hybrid Taguchi-Regression Algorithm for a Fuel Injection Control System


Abstract
:
1. Introduction
2. Working Principle
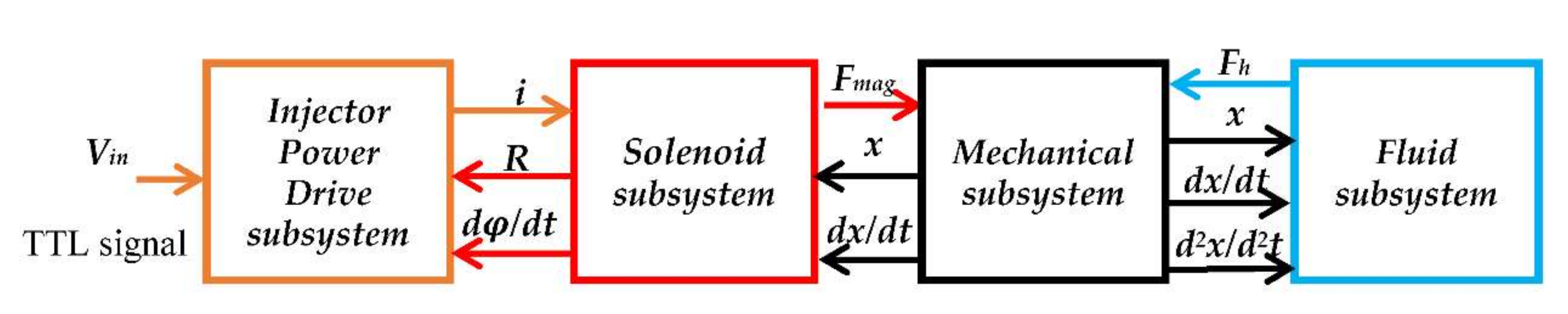
2.1. Mathematical Model
2.2. Design of an Electronically Controlled Injector Drive
3. Design and Analysis of the Fuel Injection System
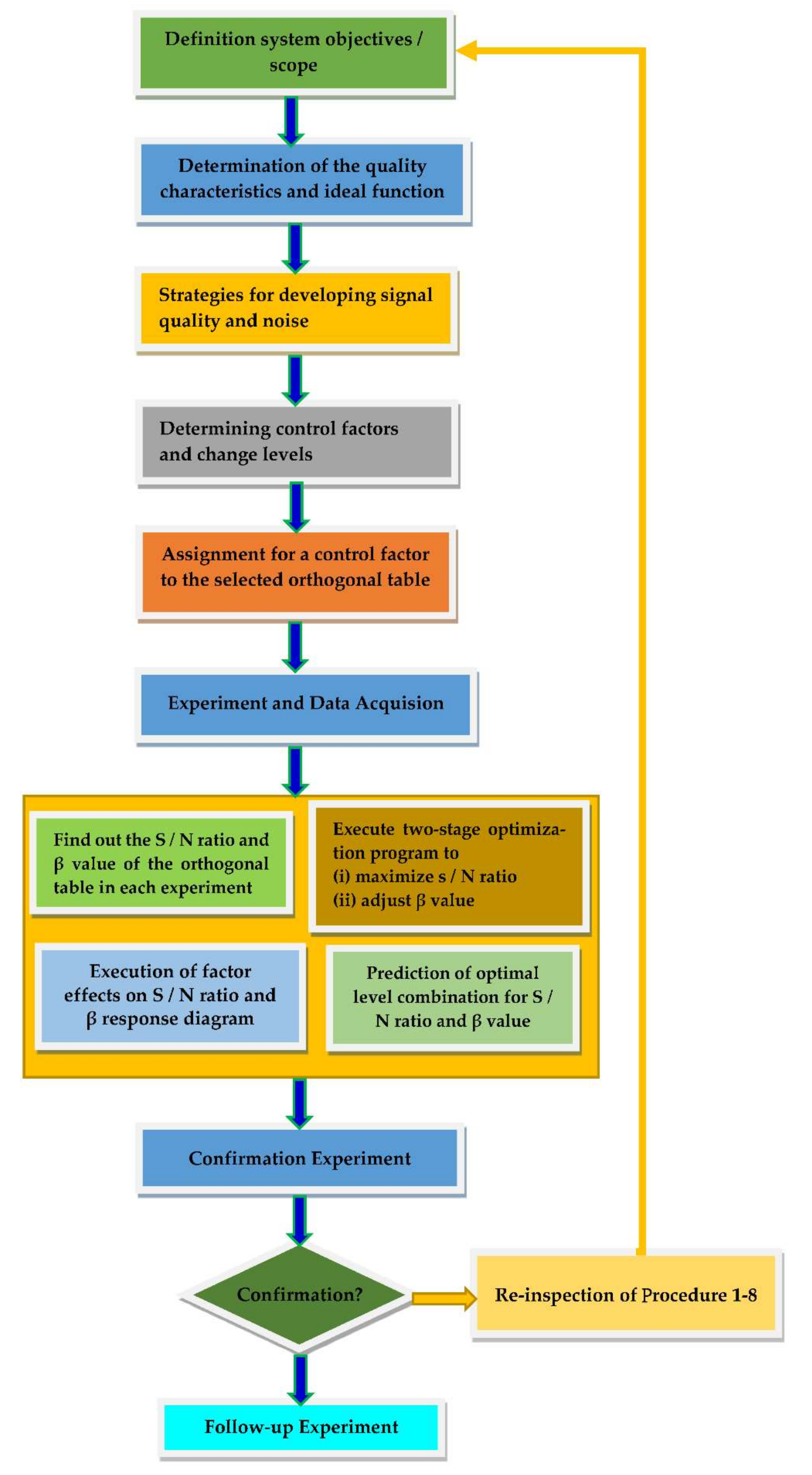
3.1. Robust Parameter Design
3.2. Regression Analysis
- Simple regression expression:
- 2.
- Multiple regression expression:
- Linear relationship
- 2.
- Normality
- 3.
- Independent variable of error term
- 4.
- The variances of error terms are equal
- 5.
- R2 (R square) Determination Coefficient
4. Model Establishment and Experimental Verification
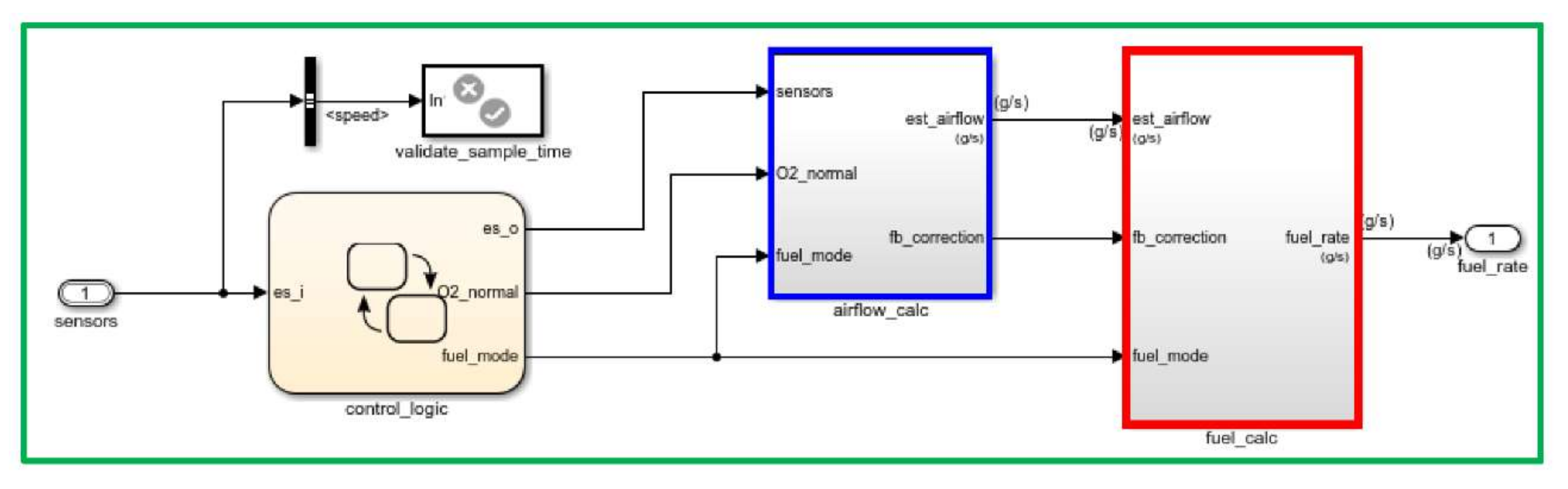
4.1. Simulation
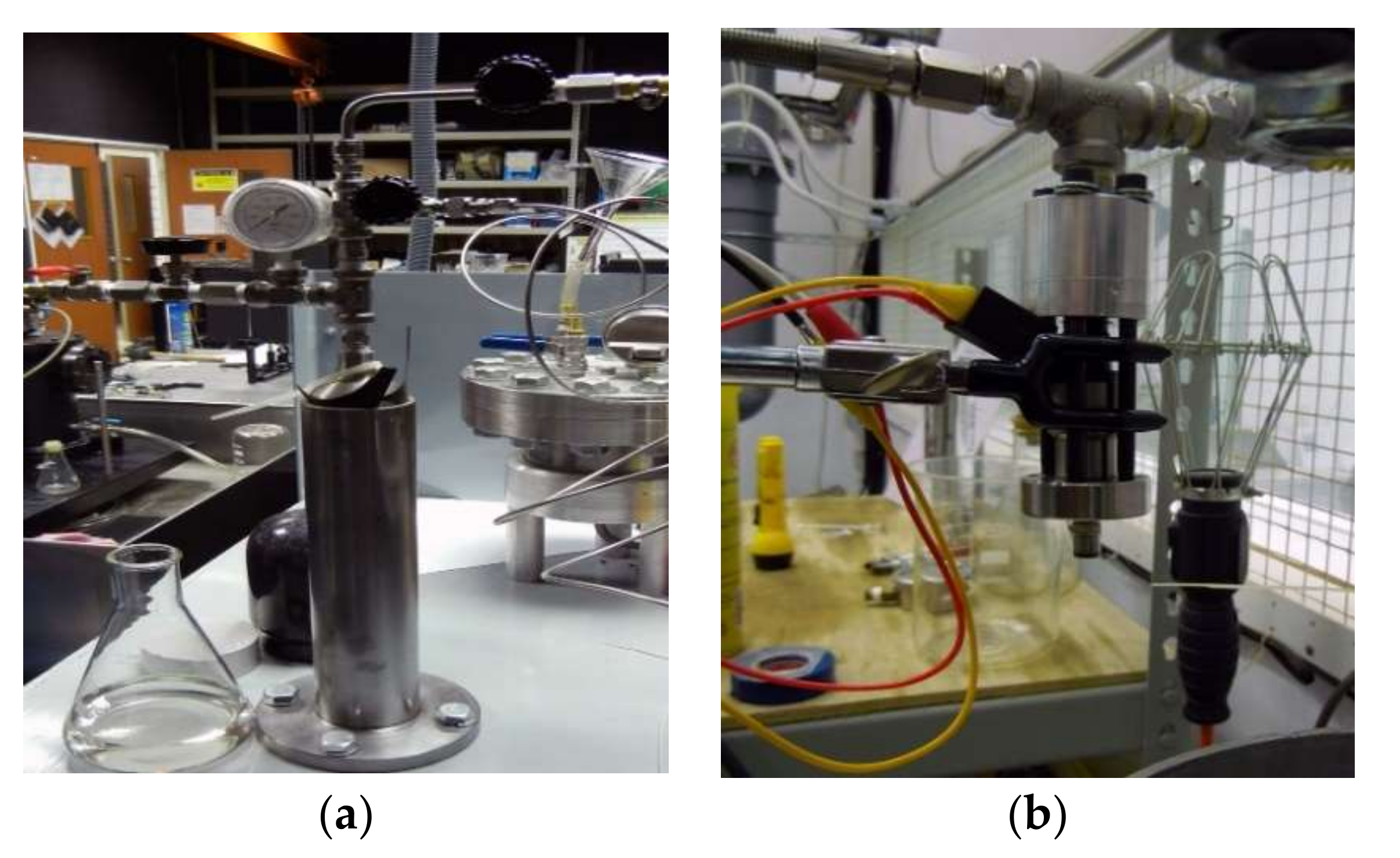
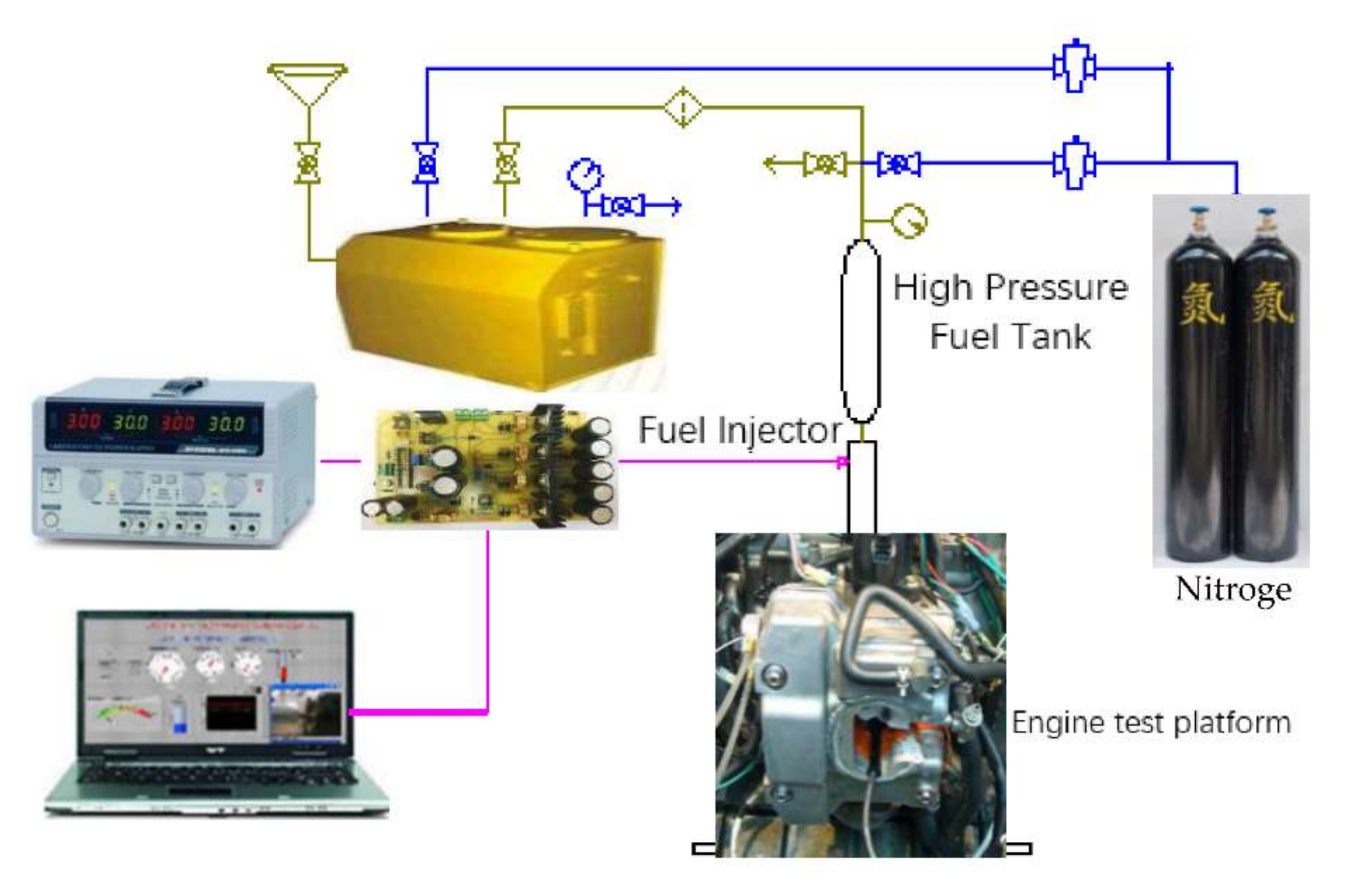
4.2. Test Equipment and Experimental Data Analysis
5. Results
- (1)
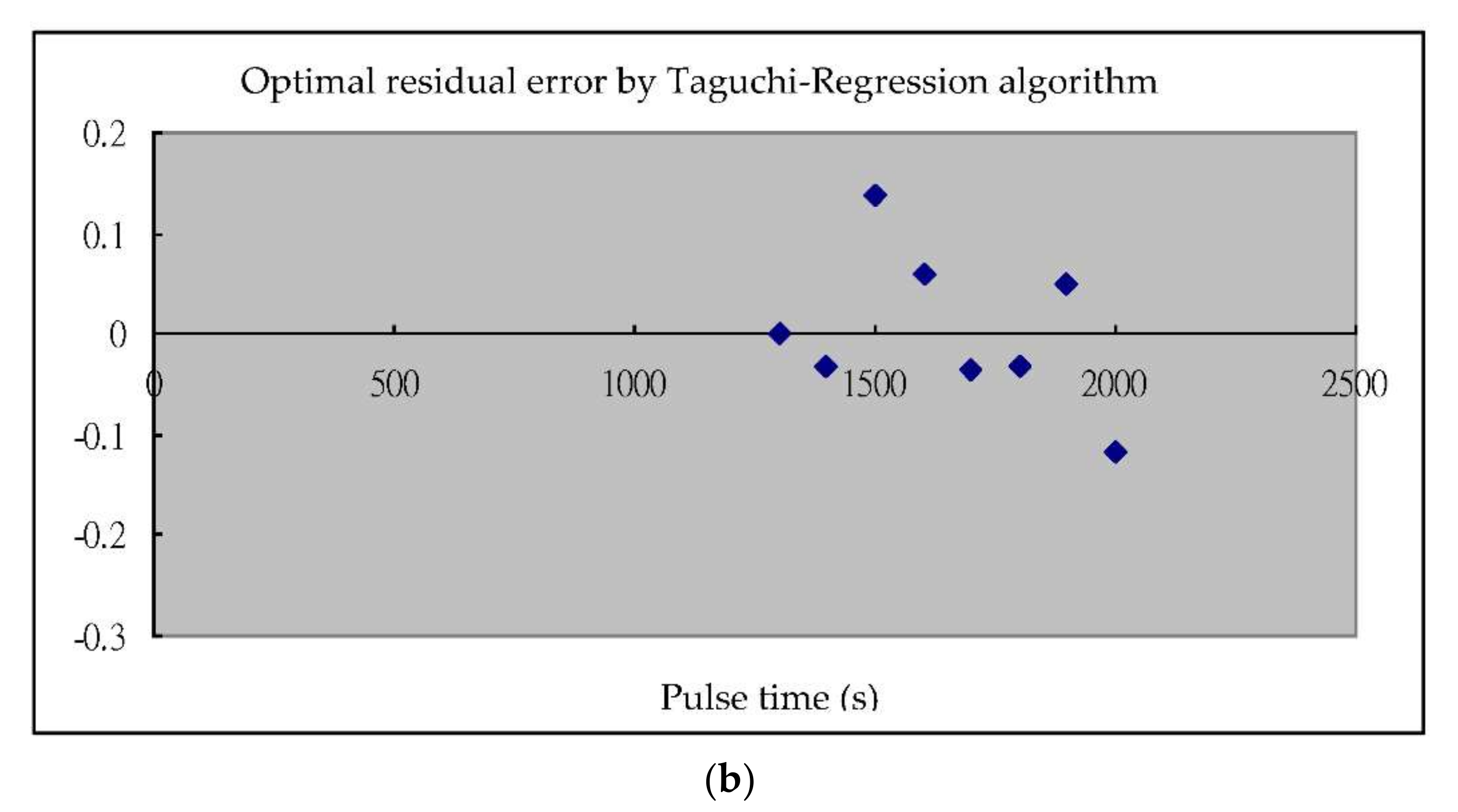
- The Taguchi-Regression method was used to find the optimal injection parameters; the structure of this experiment is GDI spray nozzle combined with high-pressure fuel supply system, using experimental bottle and precision electronic scale as the measurement of fuel weight in every 1000 injections. In the study, the experimental design method of direct cross table designed by Taguchi method could effectively list the distribution of all possible experimental results for β Slope calculation, find out the best injection parameter level, and confirm the influence of each control parameter by analysis of variance as well as the final experimental results. During the second Taguchi experiment and the third Taguchi experiment, it was found that the second driving current significantly affected the fuel injection quantity. After analysis, the first current was the starting current. After magnetizing the coil, it was used as the pre-pulling fuel needle. The second current pulled the fuel needle to reach the top of the nozzle, the third driving current PWM operation gradually demagnetized the solenoid valve coil of the nozzle, and closed the fuel needle of the nozzle to stop the injection. Finally, the coefficient of determination R2 was analyzed by regression analysis. The injection quantity of the original factory and Taguchi-regression algorithm is compared in the paper. The distribution points of the residual quantity were illustrated and the R2 coefficient value improved. From the experimental results it can be seen that the Taguchi-regression algorithm is simple, feasible and effective in the test and optimal design of the high pressure fuel nozzle driver, which can reduce unnecessary experimental tests.
- (2)
- This experiment was aimed at the linear fuel injection setting. The β calculation value was expressed by the calculation formula of S/N noise ratio. The β slope and S/N noise ratio were used for factor response analysis. The S/N noise ratio was used to represent the variation characteristics of the experimental results. The larger the value, the better, which means that the experimental results are less prone to variation and closer to the ideal target position. The β value has no effect on the S/N noise ratio, but the other influential factors on the β value were used to maximize fuel injection quantity.
- (3)
- The simulation results were analyzed by using quadratic regression analysis and regression fittings were carried out to obtain the test parameters and results. By the quadratic polynomial regression model between test indexes, regression analysis was used to analyze the recommended driving power supply used by the original factory settings of the nozzle driver and the best level confirmed by the Taguchi-regression algorithm. In the regression analysis, the setting of the nozzle driver designed and tested by the Taguchi-regression method was higher than the value set by the original manufacturer, as expressed in the R squared value shown in Table 4a,b. This value increased to a certain extent. A diagram shows the variation of fuel injection quantity between the original factory-set value in Figure 14a and the Taguchi-Regression algorithm as shown in Figure 14b. A hybrid Taguchi-Regression algorithm optimized the fuel injection quantity, significantly improving the performance of the nozzle driver.
- (4)
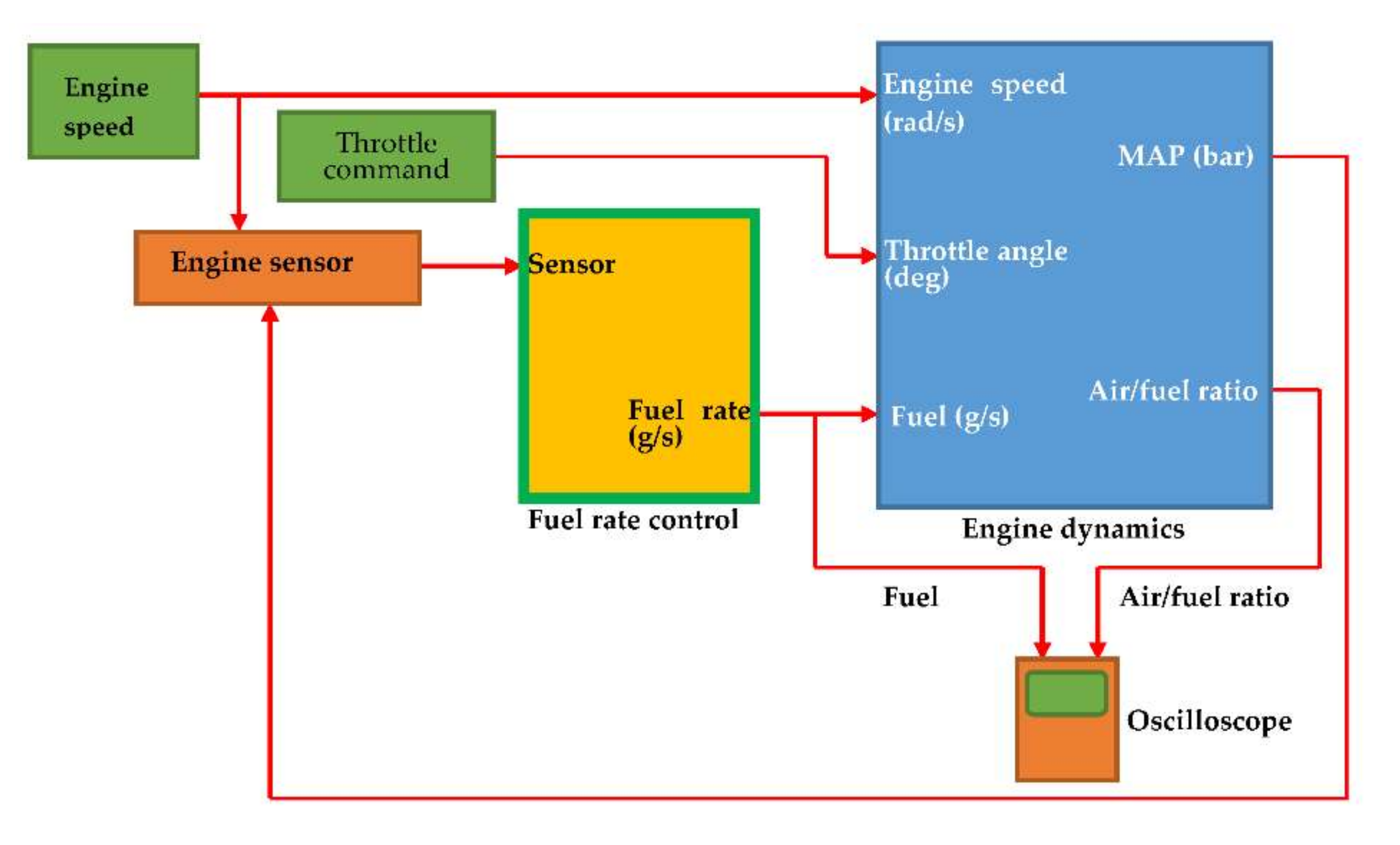
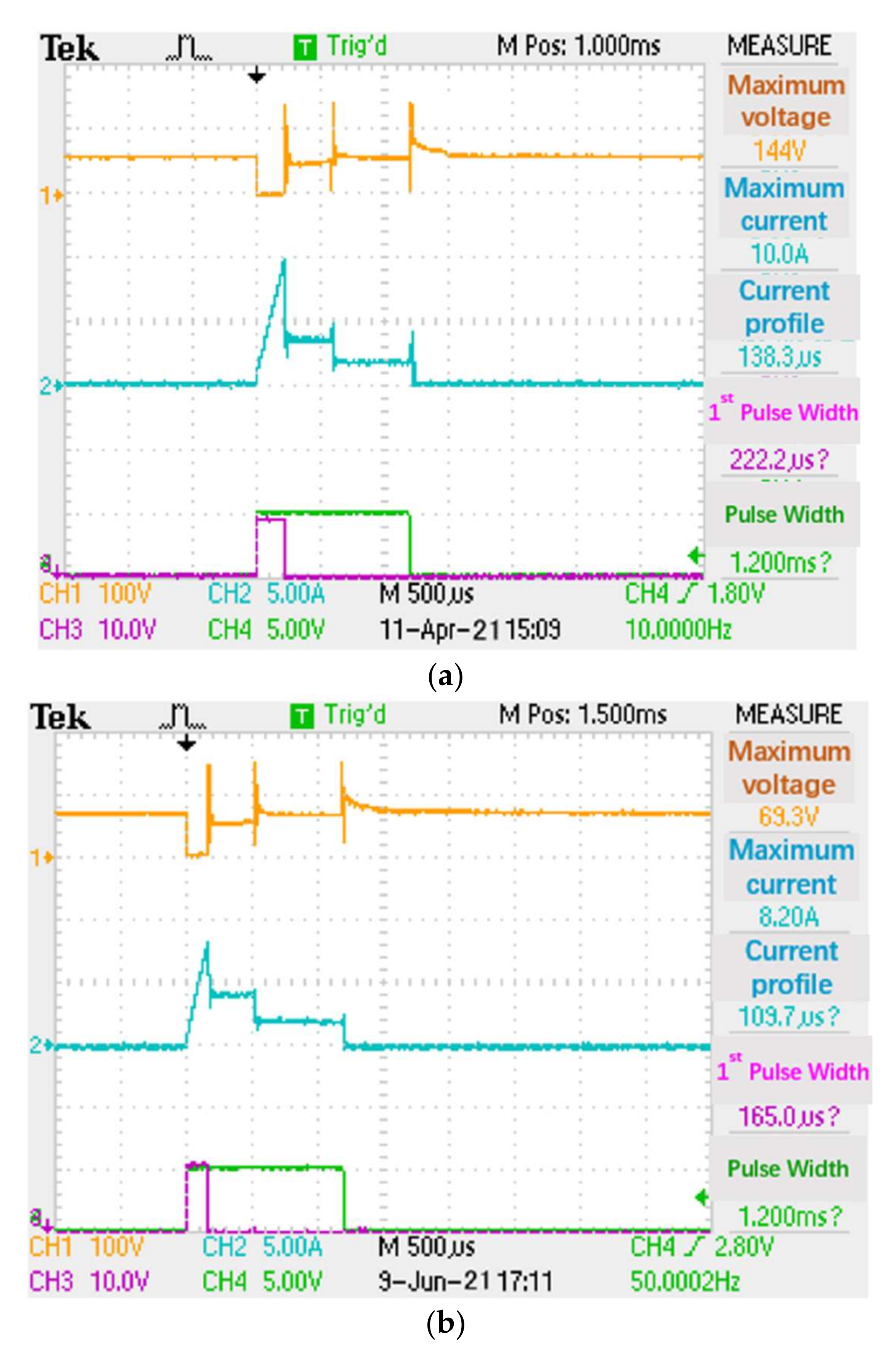
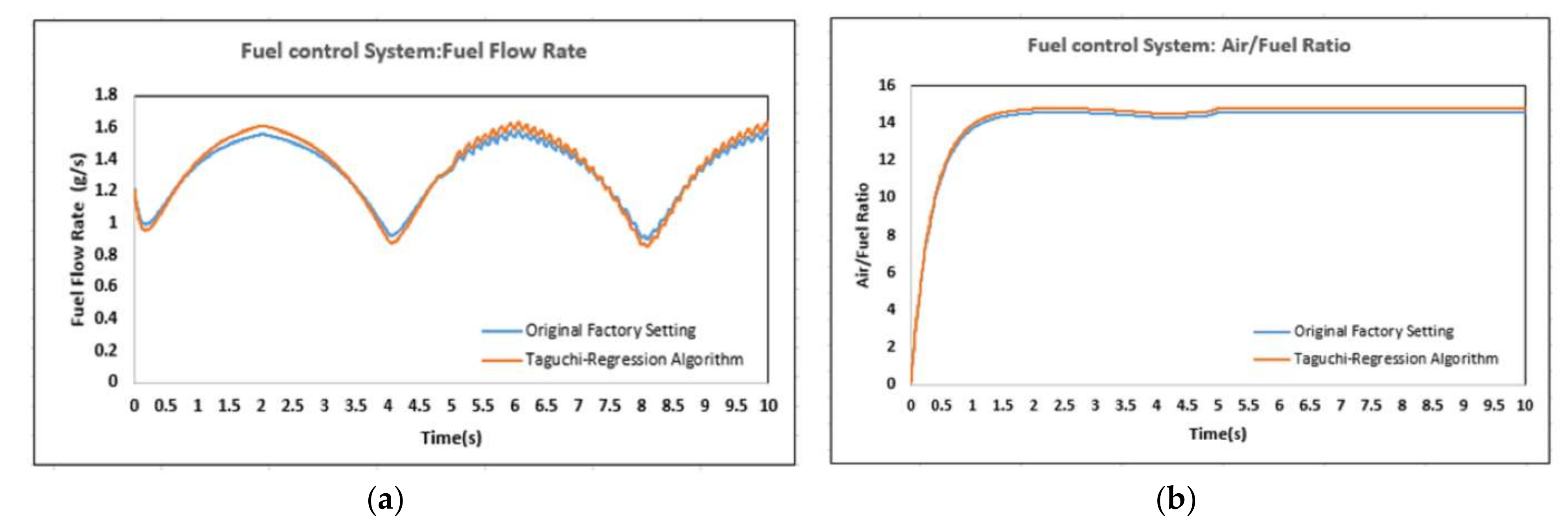
- The Taguchi-Regression method was used to establish the fuel flow rate and air/fuel ratio. The fuel injection responses were obtained by the regression model between fuel flow rate and air/fuel ratio to control the parameters. The influence of response index, comparison of original factory settings and the Taguchi-Regression algorithm for the fuel injection test are shown in Table 5. By parameter optimization, the lift was 0.05 mm and the needle valve lift was 0.34 mm, the fuel injection quantity, the variation rate and response time change rate were 1.70% and 2.27%, respectively. The instantaneous power consumption was also reduced as shown in Table 5 and Figure 15a,b. The optimal settings of the injector driving circuit had less power losses 0.091 W/pulse than 0.148 W/pulse of the original factory setting at maximum voltage 152 V, current 8.2 A, first pulse width 109.7 μs and first conduct width of 165 μs. The original factory and new designs were taken with the settings of A1-B1-C1-D1 and A3-B1-C1-D3 to implement the confirmation experiments. It was observed that variances between two experimental settings presented statistically insignificant differences for the fuel injection quantity. Therefore, two design settings were used for predicted S/N and confirmed S/N to gain the 5.34 db and 5.31 db improvement, as shown in Table 6.
- (5)
- If, at the beginning, the parameter optimization for the fuel injection system of GDI engines is working in an unknown condition, how can we find optimized working parameters? The Taguchi-Regression algorithm provides an important experimental method with good performance. In past experimental research, when we chose working parameter settings for the fuel injection system of the self-designed engine, it was found that the needle of the high-pressure injector sometimes could not continuously and effectively hold, resulting in insufficient injection quantity and engine misfiring in many engine tests. The novelty and contribution of the present paper is to provide improvements on this problem. The Taguchi-Regression algorithm can find the best working parameters of the fuel injection system with a small number of experiments. Next, the optimal working parameter settings in this study had a 5.30 db improvement compared with the original factory setting, which verifies the feasibility for the experimental method using Taguchi-Regression algorithm. Therefore, this research plays an important role in guiding design optimization, matching and calibration of the fuel injector structure.
- A and B have the highest contribution after adjusting the voltage and current of the first and second stages to reduce the range of variation.
- D compares s/N with β. The slope is used to adjust the sensitivity to the maximum value, so the fuel injection quantity is affected when adjusting the fuel supply pressure. In Figure 15a, the original waveform designed by Bosch is used for testing, and shows the pressure change affects the output of nozzle fuel quantity.
- C is used as a design consideration to reduce cost.
6. Conclusions
- (1)
- A comprehensive and efficient test scheme for the dynamic response and flow characteristics of an electronic control injector was designed. The software and hardware of the whole test system adopted a modular design, which was convenient for maintenance and development and later functional expansion.
- (2)
- By analyzing the working characteristics, dynamic processes and the test environment of a fuel injector a test system for dynamic responses and flow characteristics of the electronic control injector was built by combining a variety of hardware test equipment with computer software.
- (3)
- The dynamic response and flow characteristics were tested on the constructed test bench. In a perfect test scheme, a large number of tests would be carried out on the high-pressure injector. The test results were analyzed and summarized. Some important parameters such as static flow curve, dynamic fuel flow rate and air/fuel ratio curves in the flow characteristics of the injector were obtained.
- (4)
- To confirm that the experimental mode can accurately describe the fuel injection system, we carried out a confirmation experiment. Table 1 shows the S/N ratio predicted by the experimental mode: 34.7 db in the original design and 40.1 db in the optimal design. Table 2 shows the predicted S/N ratio calculated by performing the original design and new design experiments. Table 3 lists the results of the original design and two settings of new design experiments, and compares them with predictions. The confirmation experimental data of the original design were directly taken from Table 1. The computer simulation experiment under the optimal design shows that the predicted calculated S/N ratio is 34.713 db. It was confirmed that the S/N ratio of the experiment is 40.021, which is consistent with the S/N ratio predicted by the experimental model.
- (5)
- The control parameters A and B had the highest contribution. Adjusting the voltage and current of the first and second stages could be used to reduce the range of variation. The control parameter D compares S/N with β. The slope was used to adjust the zero sensitivity to the maximum value, so the fuel injection quantity is affected when adjusting the fuel supply pressure. In Figure 15a, the voltage and current waveform of the injector driving circuit designed by the original factory (Bosch) was used for testing, and showed the pressure change affected the output of nozzle fuel quantity. The control parameter C was used as a design consideration to reduce the cost of the fuel injection driving system.
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Nomenclature
| Symbols | Description |
| DI | Direct Injection |
| GDI | Gasoline-direct-injection |
| MOSFET | Metal oxide semiconductor field effect transistor |
| PWM | Pulse width modulation |
| PCB | Printed circuit board |
| Fuel map | Air intake and injection time |
| MPCI | Multiple premixed control injection |
| EGR rate | Exhaust gas recirculation rate |
| IMEP | Indicated Mean Effective Pressure |
| rpm | Revolutions per minute |
| S/N | Signal-to-noise dB |
| ANOVA | Analysis of variance |
| M | Fuel injection pulse duration (μs) |
| N1 and N2 | Experiments were measured in the morning and the afternoon, respectively. |
| Q1 and Q2 | The first measurement and the second measurement for confirming the precision of the fuel injection measurement system. |
References
- Leach, F.; Knorsch, T.; Laidig, C.; Wiese, W. A review of the Requirements for Injection Systems and the Effects of Fuel Quality on Particulate Emissions from GDI Engines; SAE Technical Paper 2018-01-1710; SAE International: Warrendale, PE, USA, 2018. [Google Scholar] [CrossRef]
- Raza, M.; Chen, L.; Leach, F.; Ding, S. A review of particulate number (PN) emissions from gasoline direct injection (GDI) engines and their control techniques. Energies 2018, 11, 1417. [Google Scholar] [CrossRef] [Green Version]
- Jiangjian, A.; Xiyan, B.G.; Chunde, C.Y. An Experimental Study on Fuel Injection System and Emission of a Small GDI Engine. In Proceedings of the 2nd IEEE/ASME International Conference on Mechatronics and Embedded Systems and Applications, Beijing, China, 13–16 August 2006; pp. 1–6. [Google Scholar] [CrossRef]
- Tsai, W.C.; Yu, P.C. Design of the electrical drive for the high-pressure GDI injector in a 500cc motorbike engine. Int. J. Eng. Ind. 2011, 2, 70–83. [Google Scholar]
- Lu, H.; Deng, J.; Hu, Z.; Wu, Z.; Li, L. Impact of control methods on dynamic characteristic of high speed solenoid injectors. SAE Int. J. Engines 2014, 7, 1155–1164. [Google Scholar] [CrossRef]
- Tsai, W.C.; Zhan, T.S. An Experimental Characterization for Injection Quantity of a High-pressure Injector in GDI Engines. J. Low Power Electron. Appl. 2018, 8, 36. [Google Scholar] [CrossRef] [Green Version]
- Lochner, R.H.; Matar, J.E. Designing for Quality. An Introduction to the Best of Taguchi and Western Methods of Statistical Method Design; Chapman & Hall: London, UK, 1990. [Google Scholar]
- Lee, H. Taguchi Methods: Principles and Practices of Quality Design; Gau Lih Book Co. Ltd.: Taipei, Taiwan, 2010. [Google Scholar]
- Ji, H.; Wei, M.; Liu, R.; Chang, C. Drive Control Simulation and Experimental Studies on the Flow Characteristics of a Pump Injector. IEEE Access 2020, 8, 35672–35681. [Google Scholar] [CrossRef]
- Yang, B.; Duan, Q.; Liu, B.; Zeng, K. Parametric investigation of low pressure dual-fuel direct injection on the combustion performance and emissions characteristics in a RCCI engine fueled with diesel and CH4. Fuel 2020, 260, 116408. [Google Scholar] [CrossRef]
- Tsai, W.-C. Optimization of operating parameters for stable and high operating performance of a GDI fuel injector system. Energies 2020, 13, 2405. [Google Scholar] [CrossRef]
- Chen, Y.; Zhang, Z. Development of a novel dual-coil fuel injector for direct-injection spark ignition engines. Int. J. Appl. Electromagn. Mech. 2018, 56, 301–316. [Google Scholar] [CrossRef]
- Zhang, X.; Palazzolo, A.; Kweon, C.B.; Thomas, E.; Tucker, R.; Kascak, A. Direct fuel injector power drive system optimization. SAE Int. J. Engines 2014, 7, 1137–1153. [Google Scholar] [CrossRef]
- Posey, N.A.; Wu, T.; Wolff, M.; Zumberge, J. Modeling and control scheme design of a solenoid-actuated fuel injection system. In Proceedings of the 2012 IEEE National Aerospace and Electronics Conference (NAECON), Dayton, OH, USA, 25–27 July 2012; pp. 92–95. [Google Scholar] [CrossRef]
- Qiang, C.; Zhang, Z.; Xie, N. Power losses and dynamic response analysis of ultra high-speed solenoid injector within different driven strategies. Appl. Therm. Eng. 2015, 91, 611–621. [Google Scholar]
- Wang, C.; Xu, H.; Herreros, J.M.; Wang, J. Cracknell, R. Impact of fuel and injection system on particle emissions from a GDI engine. Appl. Energy 2014, 132, 178–191. [Google Scholar] [CrossRef] [Green Version]
- Zhang, S.; Zhao, Z.; Zhao, C.; Zhang, F.; Wang, S. Experimental study of hydraulic electronic unit injector in a hydraulic free piston engine. Appl. Energy 2016, 179, 888–898. [Google Scholar] [CrossRef]
- Hung, N.B.; Lim, O.T. A simulation and experimental study on the operating characteristics of a solenoid gas injector. Adv. Mech. Eng. 2019, 11, 1687814018817421. [Google Scholar] [CrossRef] [Green Version]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| M = 1000 μs | M = 1200 μs | M = 1400 μs | M = 1600 μs | M = 1800 μs | M = 2000 μs | β | Sd | S/N | |||||||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| L | N1 | N2 | N1 | N2 | N1 | N2 | N1 | N2 | N1 | N2 | N1 | N2 | |||||||||||||||
| Q1 | Q2 | Q1 | Q2 | Q1 | Q2 | Q1 | Q2 | Q1 | Q2 | Q1 | Q2 | Q1 | Q2 | Q1 | Q2 | Q1 | Q2 | Q1 | Q2 | Q1 | Q2 | Q1 | Q2 | ||||
| 1 | 9.82 | 9.84 | 9.78 | 9.82 | 11.69 | 11.71 | 11.64 | 11.68 | 13.27 | 13.29 | 13.04 | 13.13 | 15.28 | 15.30 | 15.17 | 15.24 | 16.99 | 16.96 | 16.99 | 17.02 | 18.97 | 18.98 | 18.95 | 18.99 | 9.50 | 0.16 | 35.46 |
| 2 | 10.79 | 10.80 | 10.80 | 10.82 | 12.84 | 12.85 | 12.85 | 12.87 | 14.48 | 14.50 | 14.54 | 14.56 | 16.60 | 16.63 | 16.61 | 16.63 | 18.39 | 18.43 | 18.50 | 18.54 | 20.48 | 20.53 | 20.55 | 20.56 | 10.35 | 0.23 | 33.04 |
| 3 | 11.10 | 11.16 | 11.15 | 11.23 | 13.21 | 13.28 | 13.27 | 13.36 | 15.08 | 15.12 | 15.18 | 15.20 | 17.01 | 17.03 | 17.23 | 17.27 | 19.02 | 19.05 | 19.30 | 19.35 | 21.13 | 21.15 | 21.41 | 21.46 | 10.73 | 0.25 | 32.78 |
| 4 | 10.70 | 10.74 | 10.76 | 10.76 | 12.73 | 12.78 | 12.80 | 12.81 | 14.52 | 14.54 | 14.58 | 14.64 | 16.76 | 16.79 | 16.83 | 16.86 | 18.68 | 18.70 | 18.83 | 18.85 | 20.92 | 20.93 | 20.99 | 21.04 | 10.48 | 0.13 | 38.42 |
| 5 | 10.34 | 10.33 | 10.39 | 10.37 | 12.31 | 12.29 | 12.36 | 12.34 | 13.88 | 13.90 | 14.06 | 14.06 | 15.91 | 15.95 | 15.97 | 16.00 | 17.68 | 17.72 | 17.81 | 17.84 | 19.63 | 19.68 | 19.72 | 19.74 | 9.94 | 0.22 | 33.12 |
| 6 | 10.63 | 10.66 | 10.71 | 10.73 | 12.65 | 12.68 | 12.75 | 12.77 | 14.53 | 14.58 | 14.65 | 14.68 | 16.49 | 16.54 | 15.59 | 16.64 | 18.51 | 18.54 | 18.69 | 18.73 | 20.44 | 20.49 | 20.62 | 20.66 | 10.34 | 0.28 | 31.27 |
| 7 | 10.44 | 10.45 | 10.41 | 10.42 | 12.42 | 12.43 | 12.39 | 12.40 | 14.17 | 14.18 | 14.18 | 14.18 | 16.30 | 16.32 | 16.26 | 16.29 | 18.17 | 18.19 | 18.18 | 18.18 | 20.21 | 20.25 | 20.25 | 20.31 | 10.15 | 0.12 | 38.56 |
| 8 | 10.94 | 10.96 | 10.97 | 10.98 | 13.02 | 13.04 | 13.05 | 13.07 | 14.78 | 14.83 | 14.90 | 14.92 | 17.09 | 17.13 | 17.12 | 17.16 | 19.10 | 19.15 | 19.17 | 19.24 | 21.28 | 21.33 | 21.33 | 21.38 | 10.68 | 0.13 | 38.65 |
| 9 | 10.47 | 10.45 | 10.45 | 10.46 | 12.46 | 12.44 | 12.44 | 12.45 | 14.24 | 14.25 | 14.27 | 14.29 | 16.16 | 16.20 | 16.20 | 16.23 | 18.01 | 18.02 | 18.07 | 18.09 | 19.89 | 19.93 | 19.94 | 19.97 | 10.09 | 0.21 | 33.54 |
| Parameter | Original Design | New Design | ||||
|---|---|---|---|---|---|---|
| Setting | Response | Setting | Response | |||
| S/N | β | S/N | β | |||
| A | 1 | 32.6 | 10.20 | 3 | 36.0 | 10.19 |
| B | 1 | 37.3 | 10.01 | 1 | 37.3 | 10.01 |
| C | 1 | 34.9 | 10.17 | 1 | 34.9 | 10.17 |
| D | 1 | 33.7 | 9.81 | 3 | 36.2 | 10.63 |
| Average value | 34.6 | 10.046 | 36.1 | 10.248 | ||
| Predicted value | 34.7 | 9.530 | 40.1 | 10.334 | ||
| Exp. | M = 1200 μs | M = 1400 μs | M = 1600 μs | M = 1800 μs | M = 2000 μs | ||||||||||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| N1 | N2 | N1 | N2 | N1 | N2 | N1 | N2 | N1 | N2 | ||||||||||||||||||
| A | B | C | D | Q1 | Q2 | Q1 | Q2 | Q1 | Q2 | Q1 | Q2 | Q1 | Q2 | Q1 | Q2 | Q1 | Q2 | Q1 | Q2 | Q1 | Q2 | Q1 | Q2 | β | Sd | S/N | |
| Original | 1 | 1 | 1 | 1 | 11.78 | 11.79 | 11.73 | 11.73 | 13.41 | 13.42 | 13.35 | 13.34 | 15.32 | 15.30 | 15.28 | 15.29 | 17.04 | 17.03 | 17.01 | 17.01 | 18.93 | 18.93 | 18.92 | 18.91 | 9.530 | 0.175 | 34.713 |
| New | 3 | 1 | 1 | 3 | 12.58 | 12.58 | 12.52 | 12.53 | 14.35 | 14.35 | 14.31 | 14.32 | 16.54 | 16.55 | 16.51 | 16.52 | 18.49 | 18.50 | 18.48 | 18.48 | 20.62 | 20.62 | 20.61 | 20.61 | 10.309 | 0.103 | 40.021 |
| 3 | 1 | 3 | 3 | 12.75 | 12.75 | 12.72 | 12.74 | 14.57 | 14.58 | 14.61 | 14.60 | 16.65 | 16.65 | 16.69 | 16.69 | 18.72 | 18.71 | 18.77 | 18.76 | 20.73 | 20.72 | 20.79 | 20.78 | 10.426 | 0.117 | 40.031 | |
| Regression Statistics (a) | Regression Statistics (b) | ||
|---|---|---|---|
| Multiple R | 0.999978737 | Multiple R | 0.999990760 |
| R2 | 0.999957474 | R2 | 0.999981521 |
| Adjusted R2 | 0.857100331 | Adjusted R2 | 0.857124378 |
| Standard deviation | 0.121580305 | Standard deviation | 0.077918035 |
| Maximum Voltage | Mean Voltage | Maximum Current | Power Losses | First Pulse Width | First Conduct Width | |
|---|---|---|---|---|---|---|
| Factory setting | 144 V | 59 | 10 A | 0.148 W/pulse | 138.3 μs | 222.2 μs |
| Optimal setting | 152 V | 69.3 V | 8.2 A | 0.091 W/pulse | 109.7 μs | 165.0 μs |
| Original Design A1B1C1D1 | New Design | Improvement | |
|---|---|---|---|
| A3B1C1D3 | dB | ||
| Predicted S/N | 34.710 | 40.05 | 5.34 |
| Confirmed S/N | 34.713 | 40.02 | 5.31 |
| Factor Category | Does it Affect S/N? | Does it Affect β? | Control Factor | Purpose |
|---|---|---|---|---|
| 1 | Yes | No | A, B | To reduce the variation |
| 2 | No | Yes | D | Used to adjust the maximum sensitivity |
| 3 | No | No | C | To reduce costs |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Tsai, W.-C. A Hybrid Taguchi-Regression Algorithm for a Fuel Injection Control System. Sensors 2022, 22, 277. https://doi.org/10.3390/s22010277
Tsai W-C. A Hybrid Taguchi-Regression Algorithm for a Fuel Injection Control System. Sensors. 2022; 22(1):277. https://doi.org/10.3390/s22010277
Chicago/Turabian StyleTsai, Wen-Chang. 2022. "A Hybrid Taguchi-Regression Algorithm for a Fuel Injection Control System" Sensors 22, no. 1: 277. https://doi.org/10.3390/s22010277
APA StyleTsai, W.-C. (2022). A Hybrid Taguchi-Regression Algorithm for a Fuel Injection Control System. Sensors, 22(1), 277. https://doi.org/10.3390/s22010277