
Real-Time LIDAR-Based Urban Road and Sidewalk Detection for Autonomous Vehicles


Abstract
:1. Introduction
2. Related Work
3. The Proposed Solution
3.1. Sidewalk Detection
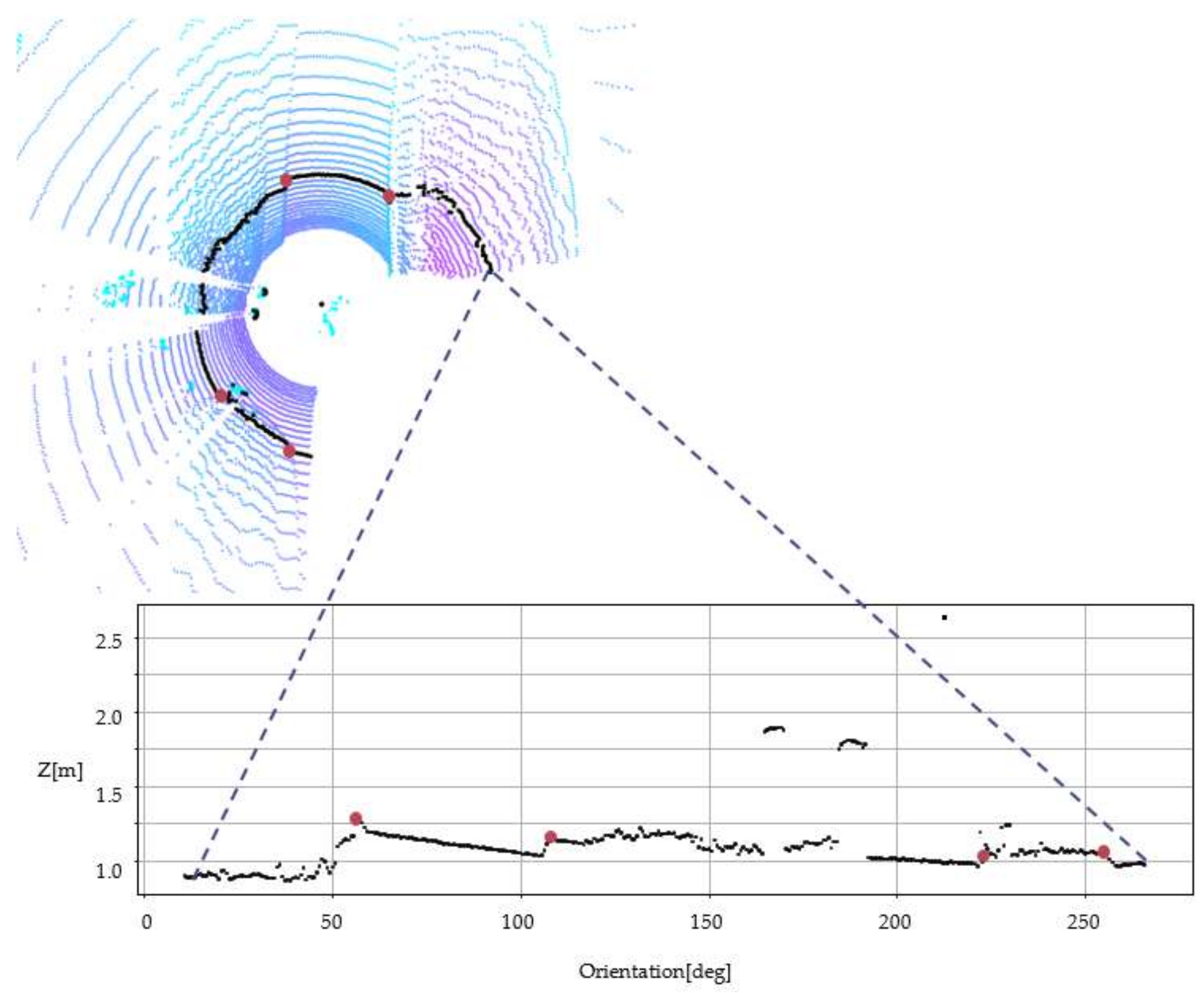
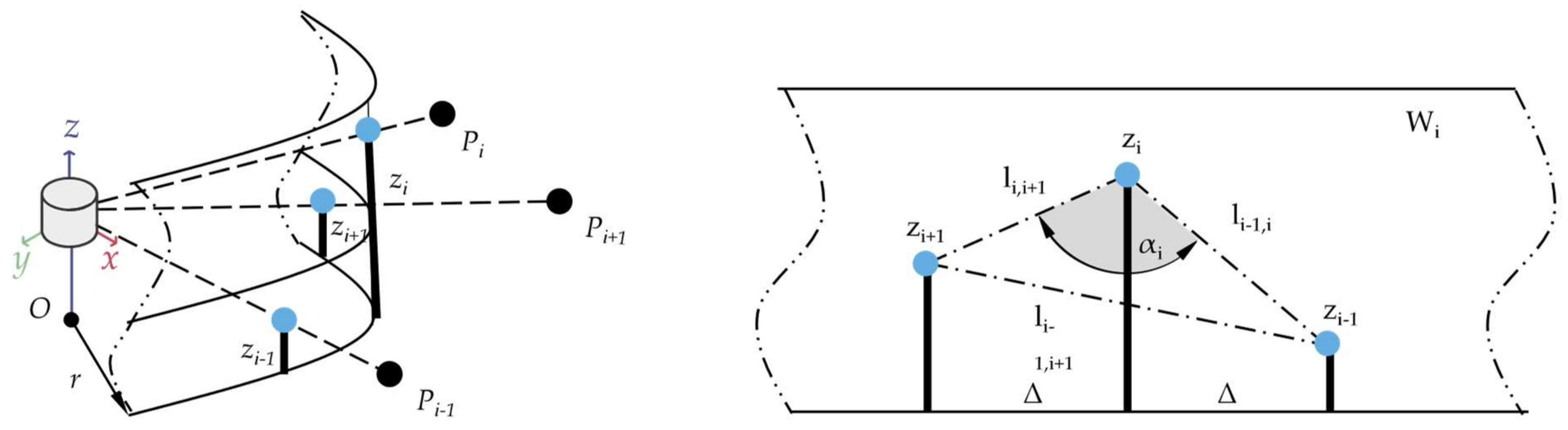
3.1.1. Star-Shaped Search Method

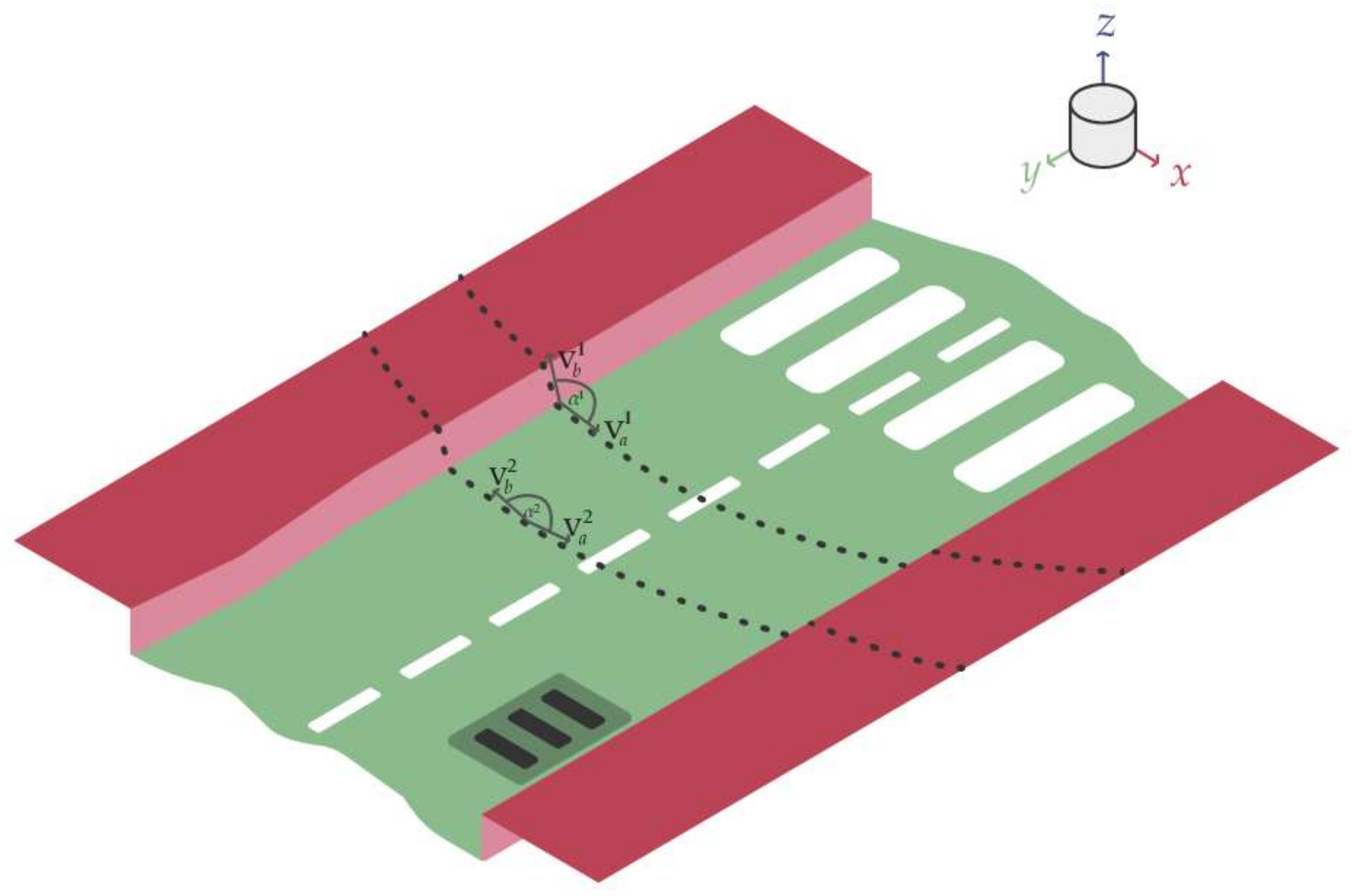
3.1.2. X-Zero Method
3.1.3. Z-Zero Method
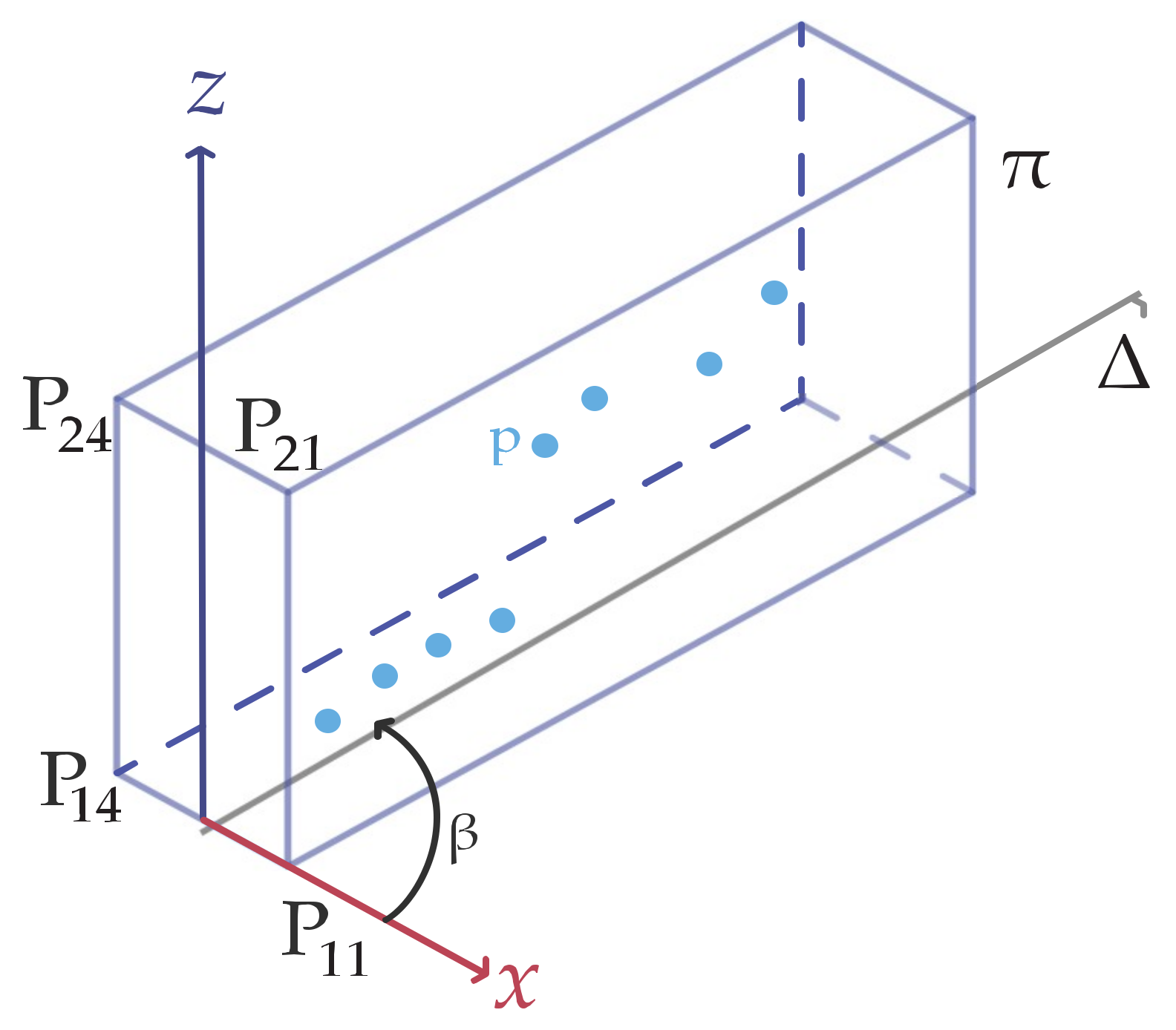
3.2. Two-Dimensional Polygon-Based Road Representation
3.3. Parameter Settings
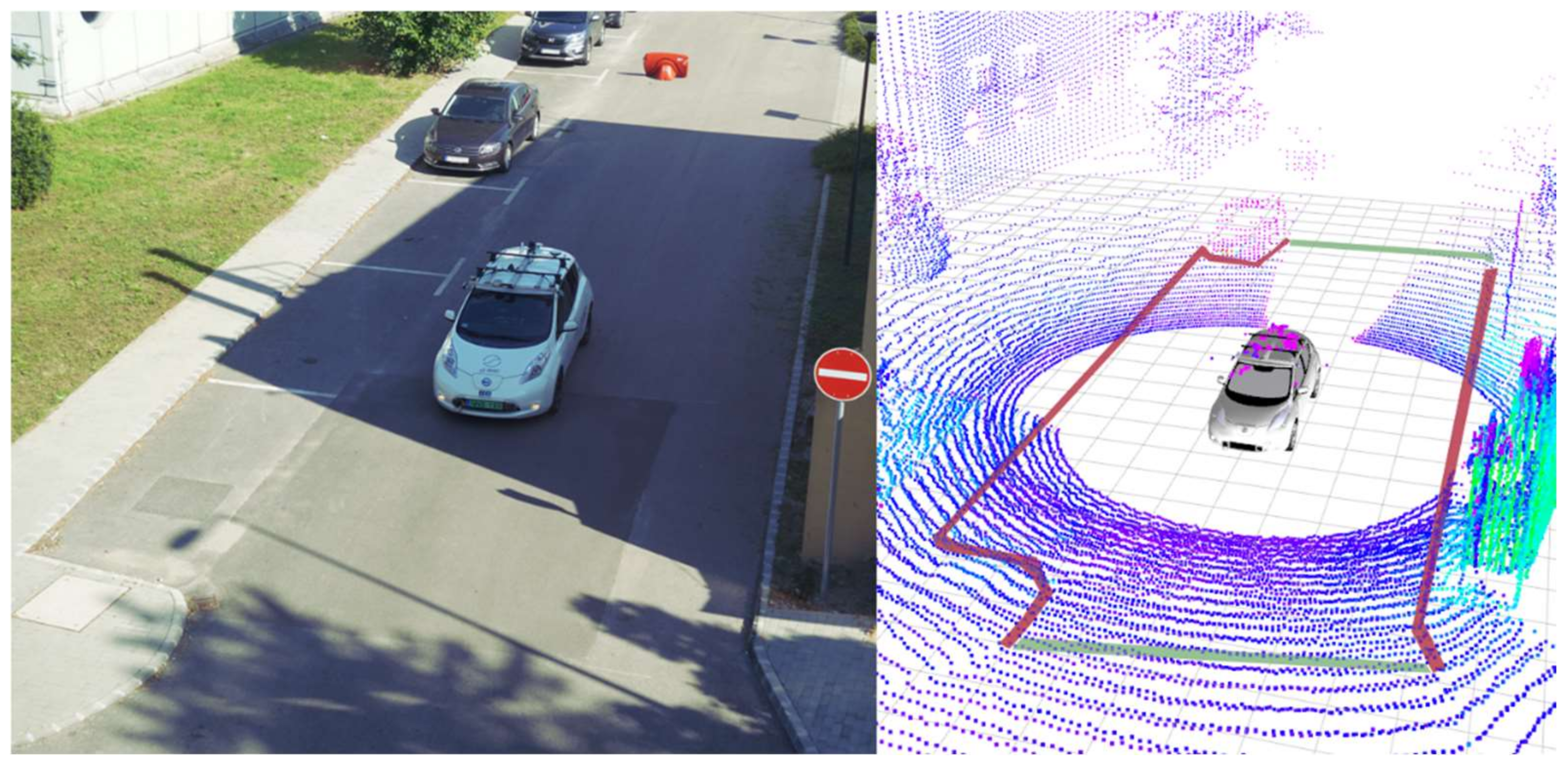
4. Results
5. Conclusions and Future Work
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Nan, Z.; Wei, P.; Xu, L.; Zheng, N. Efficient Lane Boundary Detection with Spatial-Temporal Knowledge Filtering. Sensors 2016, 16, 1276. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Pereira, V.; Tamura, S.; Hayamizu, S.; Fukai, H. Semantic Segmentation of Paved Road and Pothole Image Using U-Net Architecture. In Proceedings of the International Conference of Advanced Informatics: Concepts, Theory and Applications (ICAICTA), Yogyakarta, Indonesia, 20–21 September 2019; pp. 1–4. [Google Scholar]
- Lyu, X.H.Y. Road Segmentation Using CNN with GRU. arXiv 2018, arXiv:1804.05164. [Google Scholar]
- Mohammed, A.S.; Amamou, A.; Ayevide, F.K.; Kelouwani, S.; Agbossou, K.; Zioui, N. The Perception System of Intelligent Ground Vehicles in All Weather Conditions: A Systematic Literature Review. Sensors 2020, 20, 6532. [Google Scholar] [CrossRef] [PubMed]
- Pham, T. Semantic Road Segmentation using Deep Learning. In Proceedings of the Applying New Technology in Green Buildings (ATiGB), Da Nang, Vietnam, 12–13 March 2021. [Google Scholar]
- Zermas, D.; Izzat, I.; Papanikolopoulos, N. Fast Segmentation of 3D Point Clouds: A Paradigm on LiDAR Data for Autonomous Vehicle Applications. In Proceedings of the IEEE International Conference on Robotics and Automation (ICRA), Singapore, 29 May–3 June 2017. [Google Scholar]
- Himmelsbach, M.; Hundelshausen, F.V.; Wuensche, H.-J. Fast segmentation of 3D point clouds for ground vehicles. In Proceedings of the IEEE Intelligent Vehicles Symposium, La Jolla, CA, USA, 21–24 June 2010. [Google Scholar]
- Kang, Y.; Roh, C.; Suh, S.-B.; Song, B. Boundary Detection Using Multiple Kalman Filters. IEEE Trans. Ind. Electron. 2012, 59, 4360–4368. [Google Scholar] [CrossRef]
- Peterson, K.; Ziglar, J.; Rybski, P.E. Fast Feature Detection and Stochastic Parameter Estimation of Road. In Proceedings of the International Conference on Intelligent Robots and Systems, IROS IEEE/RSJ, Nice, France, 22–26 September 2008. [Google Scholar]
- Zai, D.; Li, J.; Guo, Y.; Cheng, M.; Lin, Y.; Luo, H.; Wang, C. 3-D Road Boundary Extraction From Mobile Laser Scanning Data via Supervoxels and Graph Cuts. IEEE Trans. Intell. Transp. Syst. 2018, 19, 802–813. [Google Scholar] [CrossRef]
- Yang, B.; Fang, L.; Li, J. Semi-automated extraction and delineation of 3D roads of street scene. ISPRS J. Photogramm. Remote Sens. 2013, 79, 80–93. [Google Scholar] [CrossRef]
- Zhang, Y.; Wang, J.; Wang, X.; Dolan, J.M. Road-Segmentation-Based Curb Detection Method for Self-Driving via a 3D-LiDAR Sensor. IEEE Trans. Intell. Transp. Syst. 2018, 19, 3981–3991. [Google Scholar] [CrossRef]
- Lyu, Y.; Bai, L.; Huang, X. Real-Time Road Segmentation Using LiDAR Data Processing on FPGA. In Proceedings of the IEEE International Symposium on Circuits and Systems (ISCAS), Florence, Italy, 27–30 May 2018. [Google Scholar]
- MiliotoIgnacio, A.; Vizzo, V.; Behley, J.; Stachniss, C. RangeNet++: Fast and Accurate LiDAR Semantic Segmentation. In Proceedings of the International Conference on Intelligent Robots and Systems (IROS), IEEE/RSJ, Macau, China, 3–8 November 2019. [Google Scholar]
- Zhang, Y.; Zhou, Z.; David, P.; Yue, X.; Xi, Z.; Gong, B.; Foroosh, H. PolarNet: An Improved Grid Representation for Online LiDAR Point Clouds Semantic Segmentation. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), Seattle, WA, USA, 13–19 June 2020. [Google Scholar]
- Massa, F.; Bonamini, L.; Settimi, A.; Pallottino, L.; Caporale, D. LiDAR-Based GNSS Denied Localization for Autonomous Racing Cars. Sensors 2020, 20, 3992. [Google Scholar] [CrossRef]
- Zhang, W. LIDAR-based road and road-edge detection. In Proceedings of the IEEE Intelligent Vehicles Symposium, San Diego, CA, USA, 21–24 June 2010; pp. 845–848. [Google Scholar]
- Han, J.; Kim, D.; Lee, M.; Sunwoo, M. Enhanced Road Boundary and Obstacle Detection using a Downward-Looking LIDAR sensor. IEEE Trans. Veh. Technol. 2012, 61, 971–985. [Google Scholar] [CrossRef]
- Yuan, X.; Zhao, C.-X.; Zhang, H.-F. Road detection and corner extraction using high-definition Lidar. Inf. Technol. J. 2010, 9, 1022–1030. [Google Scholar] [CrossRef] [Green Version]
- Fernandes, R.; Premebida, C.; Peixoto, P.; Wolf, D.; Nunes, U. Road detection using high resolution LIDAR. In Proceedings of the IEEE Vehicle Power and Propulsion Conference, Coimbra, Portugal, 27–30 October 2014. [Google Scholar]
- Baek, I.; Tai, T.; Bhat, M.; Ellango, K.; Shah, T.; Fuseini, K.; Rajkumar, R. CurbScan: Curb Detection and Tracking Using Multi-Sensor Fusion. In Proceedings of the 2020 IEEE 23rd International Conference on Intelligent Transportation Systems (ITSC), Rhodes, Greece, 20–23 September 2020; 2020. [Google Scholar]
- Yu, B.; Lee, D.; Lee, J.-S.; Kee, S.-C. Free Space Detection Using Camera-LiDAR Fusion in a Bird’s Eye View Plane. Sensors 2021, 21, 7623. [Google Scholar] [CrossRef] [PubMed]
- Jung, J.; Bae, S.H. Real-Time Road Lane Detection in Urban Areas Using LiDAR Data. Electronics 2018, 7, 276. [Google Scholar] [CrossRef] [Green Version]
- Joshi, A.; James, M.R. Generation of accurate lane-level maps from coarse prior maps and lidar. IEEE Intell. Transp. Syst. Mag. 2015, 7, 19–29. [Google Scholar] [CrossRef]
- Sivaraman, S.; Trivedi, M.M. Dynamic probabilistic drivability maps for lane change and merge driver assistance. IEEE Trans. Intell. Transp. Syst. 2014, 15, 2063–2073. [Google Scholar] [CrossRef]
- Sun, P.; Zhao, X.; Xu, Z.; Wang, R.; Min, H. A 3D LiDAR Data-Based Dedicated Road Boundary Detection Algorithm for Autonomous Vehicles. IEEE Access 2019, 7, 29623–29638. [Google Scholar] [CrossRef]
- Guojun, W.; Wu, J.; Rui, H.; Tian, B. Speed and Accuracy Tradeoff for LiDAR Data Based Road Boundary Detection. IEEE/CAA J. Autom. Sin. 2021, 8, 1210–1220. [Google Scholar]
- Guojun, W.; Wu, J.; Rui, H.; Yang, S. A Point Cloud-Based Robust Road Curb Detection and Tracking Method. IEEE Access 2019, 7, 24611–24625. [Google Scholar]
- Guerrero, J.A.; Chapuis, R.; Aufrère, R.; Malaterre, L.; Marmoiton, F. Road Curb Detection using Traversable Ground Segmentation: Application to Autonomous Shuttle Vehicle Navigation. In Proceedings of the 2020 16th International Conference on Control, Automation, Robotics and Vision (ICARCV), Shenzhen, China, 13–15 December 2020; pp. 266–272. [Google Scholar]
- Guo, Y.; Wang, H.; Hu, Q.; Liu, H.; Liu, L.; Bennamoun, M. Deep Learning for 3D Point Clouds: A Survey. IEEE Trans. Pattern Anal. Mach. Intell. 2020, 43, 12. [Google Scholar] [CrossRef]
- Douglas, D.H.; Peucker, T.K. Algorithms for the reduction of the number of points required to represent a digitized line or its caricature. Cartogr. Int. J. Geogr. Inf. Geovisualization 1973, 12, 112–122. [Google Scholar] [CrossRef] [Green Version]
- Hershberger, J.; Snoeyink, J. An O (n log n) implementation of the Douglas-Peucker algorithm for line simplification. In Proceedings of the Tenth Annual Symposium on Computational Geometry, New York, NY, USA, 6–8 June 1994. [Google Scholar]
- Szalay, Z.; Hamar, Z.; Simon, P. A Multi-layer Autonomous Vehicle and Simulation Validation Ecosystem Axis: ZalaZONE. Intell. Auton. Syst. Adv. Intell. Syst. Comput. 2019, 867, 954–963. [Google Scholar]
- Geiger, A.; Lenz, P.; Stiller, C.; Urtasun, R. Vision meets Robotics: The KITTI Dataset. Int. J. Robot. Res. 2013, 32, 1231–1237. [Google Scholar] [CrossRef] [Green Version]
- Behley, J.; Garbade, M.; Milioto, A.; Quenzel, J.; Behnke, S.; Gall, J.; Stachniss, C. Towards 3D LiDAR-based semantic scene understanding of 3D point cloud sequences: The SemanticKITTI Dataset. Int. J. Robot. Res. 2021, 40, 959–967. [Google Scholar] [CrossRef]
- Caesar, H.; Bankiti, V.; Lang, A.H.; Vora, S.; Liong, V.E.; Xu, Q.; Krishnan, A.; Pan, Y.; Baldan, G.; Beijbom, O. Nuscenes: A multimodal dataset for autonomous driving. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, Seattle, WA, USA, 5 August 2020; pp. 11621–11631. [Google Scholar]
- Burnett, K.; Samavi, S.; Waslander, S.; Barfoot, T.; Schoellig, A. aUToTrack: A Lightweight Object Detection and Tracking System for the SAE AutoDrive Challenge. In Proceedings of the 2019 16th Conference on Computer and Robot Vision (CRV), Kingston, QC, Canada, 29–31 May 2019. [Google Scholar]
- Agarwal, S.; Vora, A.; Pandey, G.; Williams, W.; Kourous, H.; McBride, J. Ford Multi-AV Seasonal Dataset. Int. J. Robot. Res. 2020, 39, 1367–1376. [Google Scholar] [CrossRef]
- Wang, Z.; Ding, S.; Li, Y.; Fenn, J.; Roychowdhury, S.; Wallin, A.; Martin, L.; Ryvola, S.; Sapiro, G.; Qiu, Q. Cirrus: A Long-range Bi-pattern LiDAR Dataset. In Proceedings of the 2021 IEEE International Conference on Robotics and Automation (ICRA), Xi’an, China, 30 May–5 June 2021. [Google Scholar]
- Geyer, J.; Kassahun, Y.; Mahmudi, M.; Ricou, X.; Durgesh, R.; Chung, A.S.; Hauswald, L.; Pham, V.H.; Mühlegg, M.; Dorn, S.; et al. A2D2: Audi Autonomous Driving Dataset. arXiv 2020, arXiv:2004.06320v1. [Google Scholar]
- Zhao, F.; Jiang, H.; Liu, Z. Recent development of automotive LiDAR technology, industry and trends. In Proceedings of the SPIE 11179, Eleventh International Conference on Digital Image Processing (ICDIP 2019), Guangzhou, China, 14 August 2019. [Google Scholar]
- Aijazi, A.K.; Malaterre, L.; Trassoudaine, L.; Checchin, P. Systematic Evaluation and Characterization of 3D Solid State LIDAR Sensors for Autonomous Ground Vehicles. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2020, XLIII-B1, 199–203. [Google Scholar] [CrossRef]
- Ding, Y.; Hou, H.; Huang, Q.; Liu, J.; Hussain, S.; Qiao, G. Enhanced Performance of Fabry-Perot Tunable Filter by Groove Geometry Design of Double Folded Cantilever. J. Nanoelectron. Optoelectron. 2020, 15, 687–692. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Param Name | Function | Type | (Interval)/Default |
|---|---|---|---|
| fixed_frame | The fixed frame from the transform list in ROS. | String | String |
| topic_name | The name of the LIDAR topic. | String | String |
| x_zero_method | A flag indicating whether the X-zero method is enabled. | Bool | (True-False)/True |
| z_zero_method | A flag indicating whether the Z-zero method is enabled. | Bool | (True-False)/True |
| star_shaped_method | A flag indicating whether the star-shaped method is enabled. | Bool | (True-False)/True |
| blind_spots | Filtering blind spots. | Bool | (True-False)/True |
| x_direction | Filtering x direction. Positive means in front of the LIDAR. | Both/ positive/negative | Both |
| interval | LIDAR’s vertical resolution. | Double | (0–10)/0.18 |
| curb_height | Estimated minimum height of the curb (m). | Double | (0–10)/0.05 |
| curb_points | Estimated number of points on the curb (pcs). | Int | (1–30)/5 |
| beam_zone | Width of the beam zone (deg). | Double | (10–100)/30 |
| cylinder_deg_x | The included angle of the examined triangle (three points) (deg) in x_zero_method. | Double | (0–180)/150 |
| cylinder_deg_z | The included angle of the examined triangle (two vectors) (deg) in z_zero_method. | Double | (0–180)/140 |
| sector_deg | Radial threshold (deg) in star_shaped_method. | Double | (0–180)/50 |
| min_x,max_x,min_y,max_y,min_z,max_z | Size of the examined area x, y, z (m). | Double | (−200–200)/30 |
| dmin_param | Minimum number of points for dispersion. | Int | (3–30)/10 |
| kdev_param | Dispersion coefficient | Double | (0.5–5)/1.1225 |
| kdist_param | Distance coefficient. | Double | (0.4–10)/2 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Horváth, E.; Pozna, C.; Unger, M. Real-Time LIDAR-Based Urban Road and Sidewalk Detection for Autonomous Vehicles. Sensors 2022, 22, 194. https://doi.org/10.3390/s22010194
Horváth E, Pozna C, Unger M. Real-Time LIDAR-Based Urban Road and Sidewalk Detection for Autonomous Vehicles. Sensors. 2022; 22(1):194. https://doi.org/10.3390/s22010194
Chicago/Turabian StyleHorváth, Ernő, Claudiu Pozna, and Miklós Unger. 2022. "Real-Time LIDAR-Based Urban Road and Sidewalk Detection for Autonomous Vehicles" Sensors 22, no. 1: 194. https://doi.org/10.3390/s22010194
APA StyleHorváth, E., Pozna, C., & Unger, M. (2022). Real-Time LIDAR-Based Urban Road and Sidewalk Detection for Autonomous Vehicles. Sensors, 22(1), 194. https://doi.org/10.3390/s22010194