
Development of Force Sensor System Based on Tri-Axial Fiber Bragg Grating with Flexure Structure




Abstract
1. Introduction
2. Materials and Methods
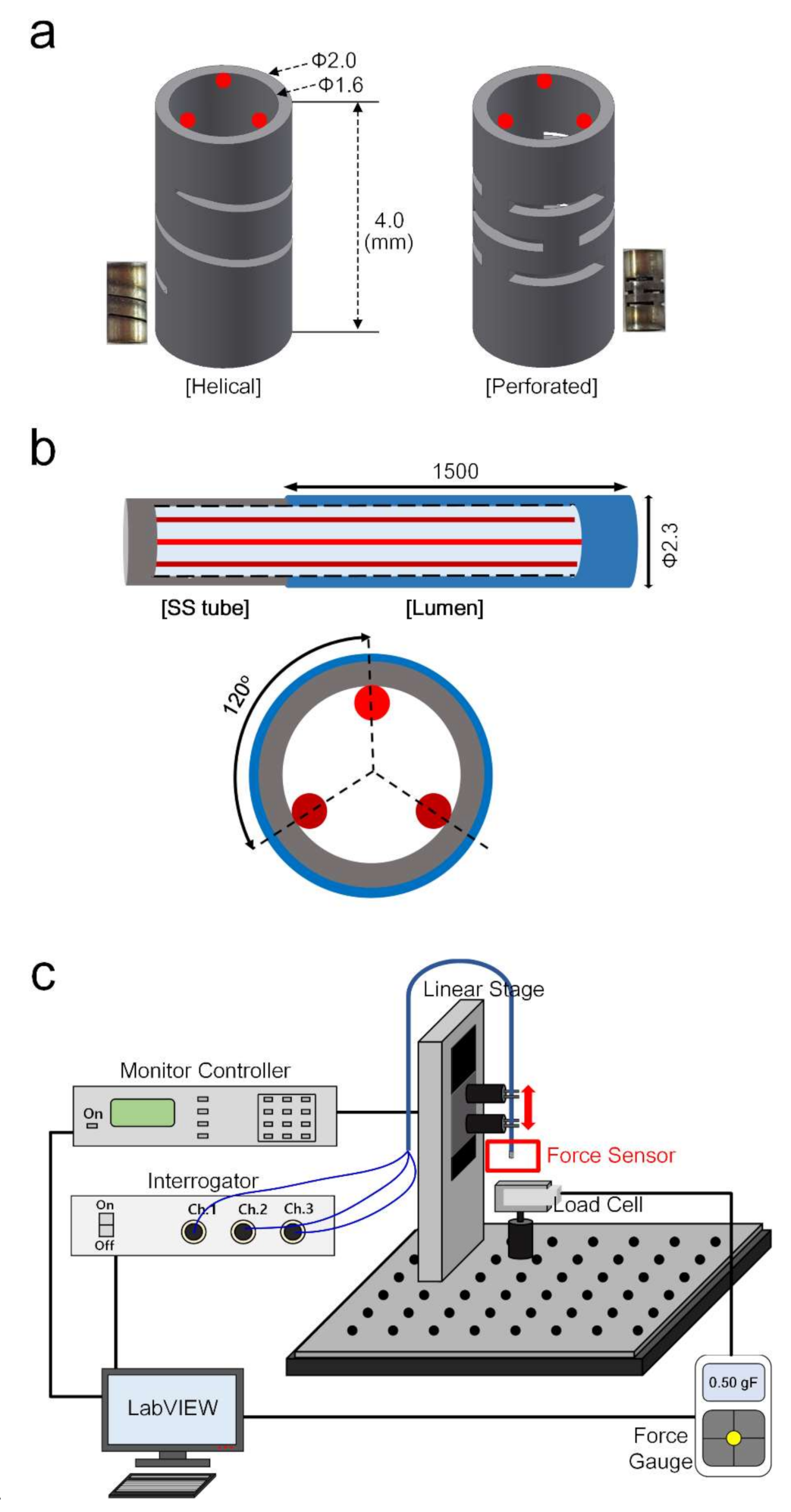
2.1. Design of Flexure Sturcture for the Fabrication of the FBG Sensor
2.2. FBG Sensor Setup
3. Results
3.1. Principle of the FBG for Sensor
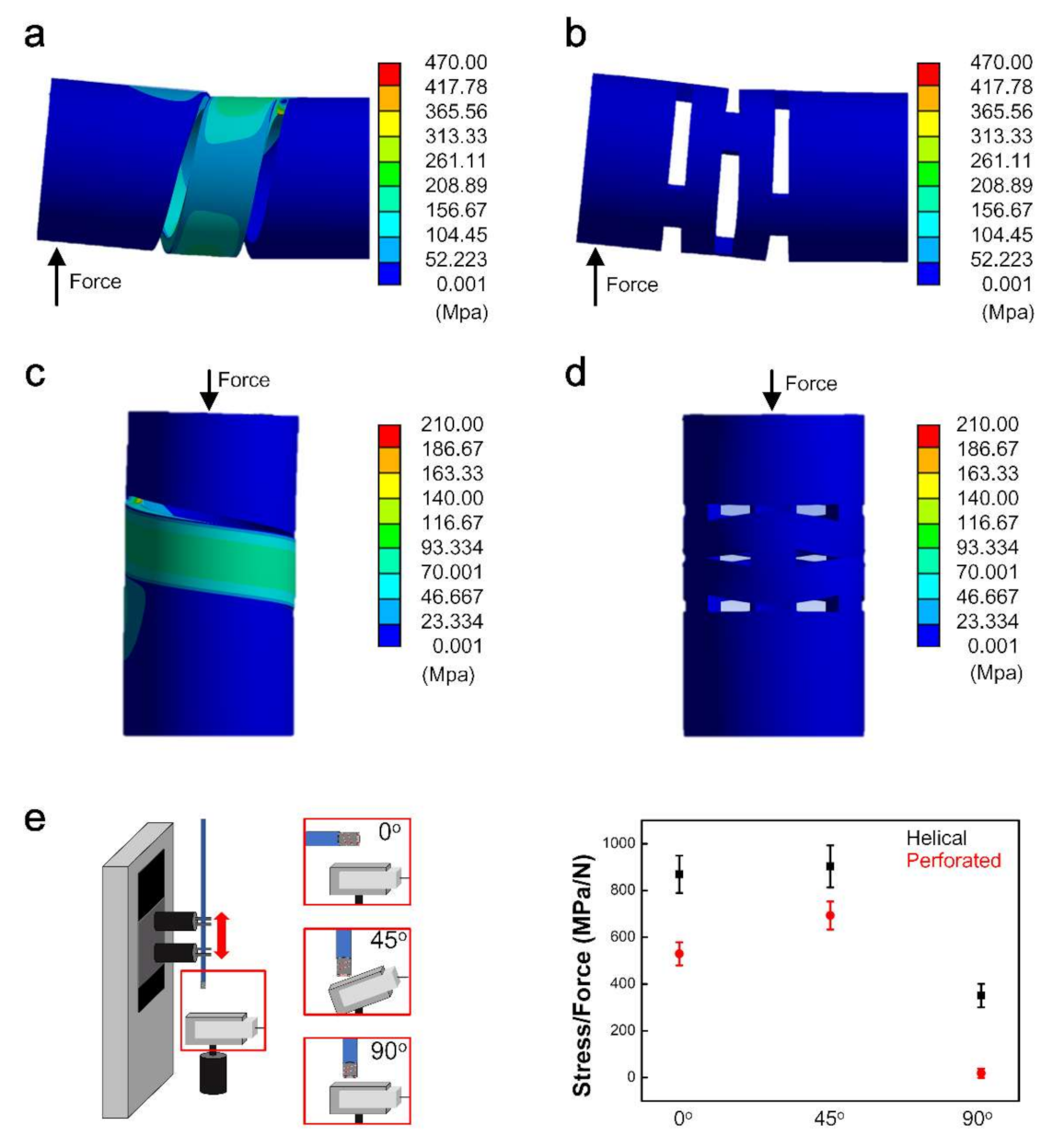
3.2. Flexure Structure Stress Distribution and Sensitivity
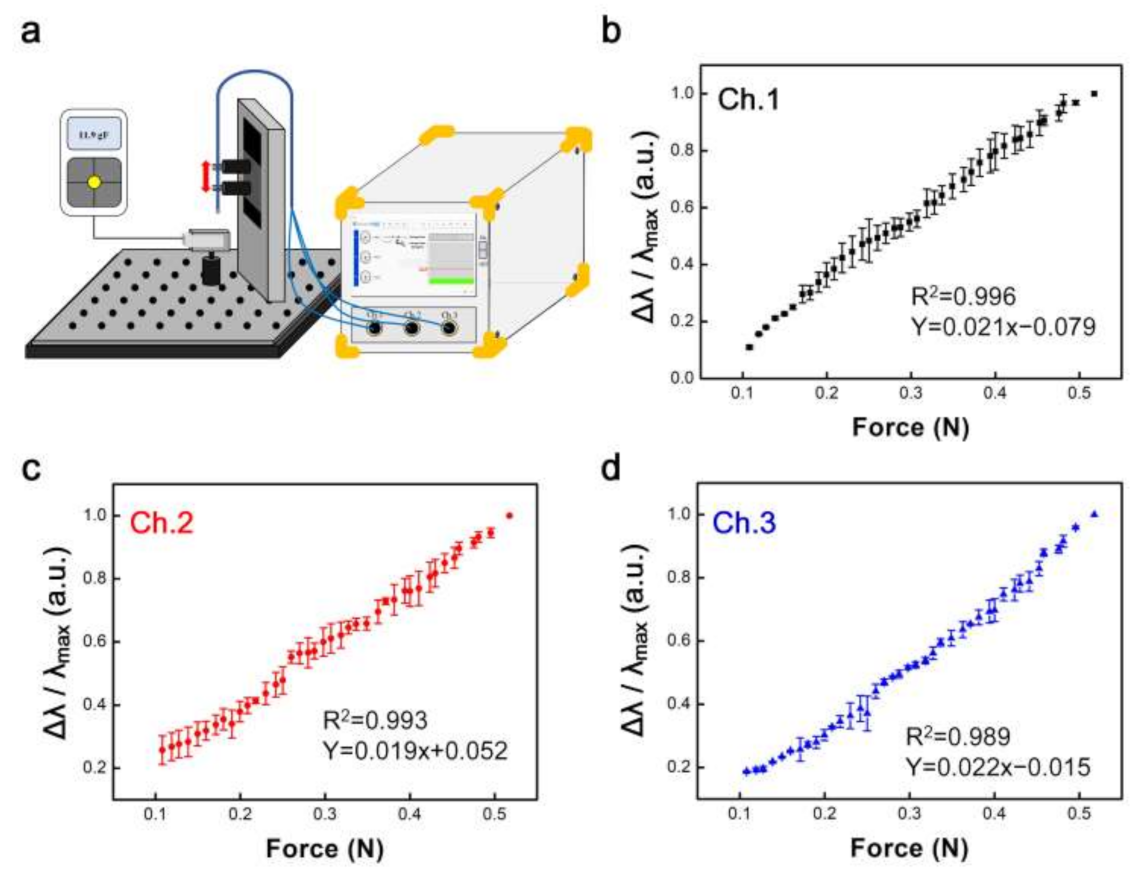
3.3. Integration of Force Sensor System with the Calibration Curve
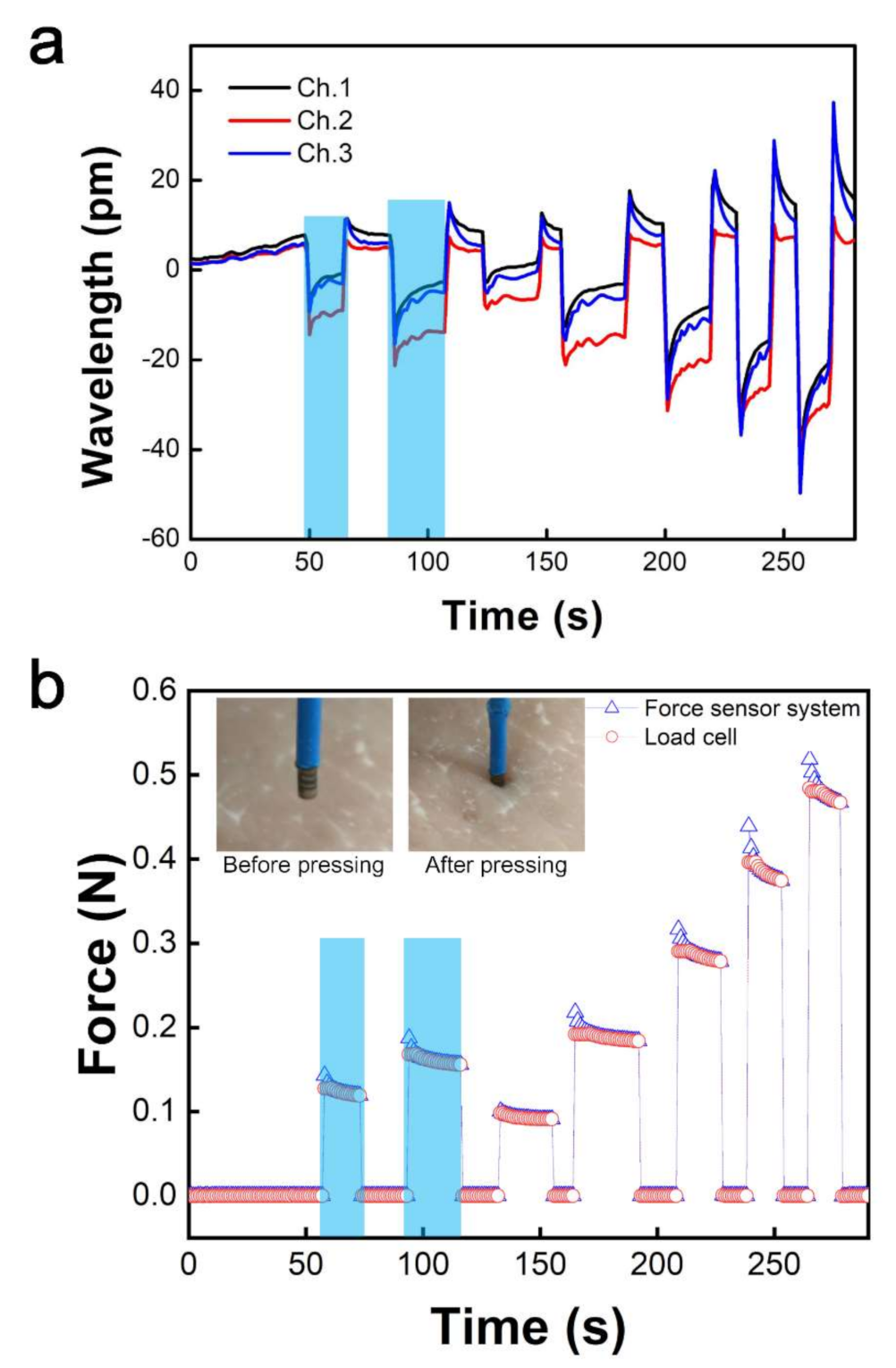
3.4. Real-time FBG Sensing Performance
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Kulkarni, A.; Na, J.; Kim, Y.; Kim, T. The plastic optical fiber cantilever beam as a force sensor. Microw. Opt. Technol. Lett. 2009, 51, 1020–1023. [Google Scholar] [CrossRef]
- Fu, Y.; Gao, A.; Liu, H.; Li, K.; Liang, Z. Development of a novel robotic catheter system for endovascular minimally invasive surgery. In Proceedings of the 2011 IEEE/ICME International Conference on Complex Medical Engineering, Harbin, China, 22–25 May 2011. [Google Scholar]
- Polygerinos, P.; Puangmali, P.; Schaeffter, T.; Razavi, R.; Seneviratne, L.D.; Althoefer, K. Novel miniature MRI-compatible fiber-optic force sensor for cardiac catheterization procedures. In Proceedings of the 2010 IEEE International Conference on Robotics and Automation, Anchorage, AK, USA, 3–8 May 2010. [Google Scholar]
- Polygerinos, P.; Seneviratne, L.D.; Razavi, R.; Schaeffter, T.; Althoefer, K. Triaxial catheter-tip force sensor for MRI-guided cardiac procedures. IEEE ASME Trans. Mechatron. 2012, 18, 386–396. [Google Scholar] [CrossRef]
- Puangmali, P.; Liu, H.; Seneviratne, L.D.; Dasgupta, P.; Althoefer, K. Miniature 3-axis distal force sensor for minimally invasive surgical palpation. IEEE ASME Trans. Mechatron. 2011, 17, 646–656. [Google Scholar] [CrossRef]
- Shin, D.; Kim, H.; Kim, T. Development of Tri-axial Fiber Bragg Grating Force Sensor in Catheter Application. In Proceedings of the 2018 IEEE International Symposium on Medical Measurements & Applications, Rome, Italy, 11–13 June 2018; pp. 1–5. [Google Scholar]
- Noh, Y.; Liu, H.; Sareh, S.; Chathuranga, D.; Würdemann, H.; Rhode, K.; Althoefer, K. Image-based optical miniaturized three-axis force sensor for cardiac catheterization. IEEE Sens. J. 2016, 16, 7924–7932. [Google Scholar] [CrossRef]
- Polygerinos, P.; Zbyszewski, D.; Schaeffter, T.; Razavi, R.; Seneviratne, L.D.; Althoefer, K. MRI-compatible fiber-optic force sensors for catheterization procedures. IEEE Sens. J. 2010, 10, 1598–1608. [Google Scholar] [CrossRef]
- Akinyemi, T.; Omisore, O.; Duan, W.; Lu, G.; Du, W.; Alhanderish, Y.; Li, Y.; Wang, L. Development of a Millinewton FBG-Based Distal Force Sensor for Intravascular Interventions. In Proceedings of the 2020 16th International Conference on Control, Automation, Robotics and Vision (ICARCV), Sapporo, Japan, 6–9 July 2020. [Google Scholar]
- Pandya, J.; Sheng, J.; Desai, J.P. Towards a tri-axial flexible force sensor for catheter contact force measurement. Proceeding of the IEEE Sensors, Glasgow, UK, 29 October–1 November 2017. [Google Scholar]
- Su, H.; Iordachita, I.; Tokuda, J.; Hata, N.; Liu, X.; Seifabadi, R.; Xu, S.; Wood, B.; Fischer, G. Fiber-Optic Force Sensors for MRI-Guided Interventions and Rehabilitation: A Review. IEEE Sens. J. 2017, 17, 1952–1963. [Google Scholar] [CrossRef] [PubMed]
- He, X.; Handa, J.; Gehlbach, P.; Taylor, R.; Iordachita, I. A submillimetric 3-DOF force sensing instrument with integrated fiber Bragg grating for retinal microsurgery. IEEE Trans. Biomed. 2013, 61, 522–534. [Google Scholar]
- Kulkarni, A.; Na, J.; Kim, Y.J.; Baik, S.; Kim, T. An evaluation of the optical fiber beam as a force sensor. Opt. Fiber Technol. 2009, 15, 131–135. [Google Scholar] [CrossRef]
- Li, T.; Shi, C.; Ren, H. Three-Dimensional Catheter Distal Force Sensing for Cardiac Ablation Based on Fiber Bragg Grating. IEEE ASME Trans. Mechatron. 2018, 23, 2316–2327. [Google Scholar] [CrossRef]
- Gao, A.; Zhou, Y.; Cao, L.; Wang, Z.; Liu, H. Fiber Bragg Grating-Based Triaxial Force Sensor with Parallel Flexure Hinges. IEEE Trans. Ind. Electron. 2018, 65, 8215–8223. [Google Scholar] [CrossRef]
- Taghipour, A.; Cheema, A.; Gu, X.; Janabi-Sharifi, F. Temperature Independent Triaxial Force and Torque Sensor for Minimally Invasive Interventions. IEEE/ASME Trans. Mechatron. 2020, 25, 449–459. [Google Scholar] [CrossRef]
- Torres, B.; Payá-Zaforteza, I.; Calderón, P.A.; Adam, J.M. Analysis of the strain transfer in a new FBG sensor for structural health monitoring. Eng. Struct. 2011, 33, 539–548. [Google Scholar] [CrossRef]
- Atieh, A.; Ahmadi, R.; Kalantari, M.; Dargahi, J.; Packirisamy, M. A piezoresistive based tactile sensor for use in minimally invasive surgery. In Proceedings of the 2011 IEEE 37th Annual Northeast Bioengineering Conference NEBEC, Troy, NY, USA, 1–3 April 2011. [Google Scholar]
- Rao, Y.-J.; Webb, D.J.; Jackson, D.A.; Zhang, L.; Bennion, I. Optical in-fiber Bragg grating sensor systems for medical applications. J. Biomed. Opt. 1998, 3, 38–44. [Google Scholar] [CrossRef]
- Xu, L.; Miller, M.I.; Ge, J.; Nilsson, K.R.; Tse, Z.T.H.; Fok, M.P. Temperature-insensitive fiber-optic contact force sensor for steerable catheters. IEEE Sens. J. 2016, 16, 4771–4775. [Google Scholar] [CrossRef]
- Xu, M.G.; Geiger, H.; Dakin, J.P. Modeling and performance analysis of a fiber Bragg grating interrogation system using an acousto-optic tunable filter. J. Lightwave Technol. 1996, 14, 391–396. [Google Scholar]
- Turkkan, O.; Venkiteswaran, V.; Su, H. Rapid conceptual design and analysis of spatial flexure mechanisms. Mech. Mach. Theory 2018, 121, 650–668. [Google Scholar] [CrossRef]
- Diletti, R.; van Mieghem, N.M.; Valgimigli, M.; Karanasos, A.; Everaert, B.; Daemen, J.; van Geuns, R.-J.; de Jaegere, P.P.; Zijlstra, F.; Regar, E. Rapid exchange ultra-thin microcatheter using fibre-optic sensing technology for measurement of intracoronary fractional flow reserve. EuroIntervention 2015, 11, 428–432. [Google Scholar] [CrossRef][Green Version]
- Abushagur, A.A.; Arsad, N.; Reaz, M.I.; Bakar, A. Advances in bio-tactile sensors for minimally invasive surgery using the fibre Bragg grating force sensor technique: A survey. Sensors 2014, 14, 6633–6665. [Google Scholar] [CrossRef]
- Yokoyama, K.; Nakagawa, H.; Shah, D.C.; Lambert, H.; Leo, G.; Aeby, N.; Ikeda, A.; Pitha, J.V.; Sharma, T.; Lazzara, R. Novel contact force sensor incorporated in irrigated radiofrequency ablation catheter predicts lesion size and incidence of steam pop and thrombus. Circ. Arrhythm Electrophysiol. 2008, 1, 354–362. [Google Scholar] [CrossRef] [PubMed]
- Chung, K.M.; Liu, Z.; Lu, C.; Tam, H.-Y. Highly sensitive compact force sensor based on microfiber Bragg grating. IEEE Photonics Technol. Lett. 2012, 24, 700–702. [Google Scholar] [CrossRef]
- Ho, S.C.M.; Razavi, M.; Nazeri, A.; Song, G. FBG sensor for contact level monitoring and prediction of perforation in cardiac ablation. Sensors 2012, 12, 1002–1013. [Google Scholar] [CrossRef] [PubMed]
- Li, L.; Zhang, D.; Guo, S.; Qu, H. A generic compliance modeling method for two-axis elliptical-arc-filleted flexure hinges. Sensors 2017, 17, 2154. [Google Scholar] [CrossRef] [PubMed]
- Shi, C.; Li, T.; Ren, H. A Millinewton Resolution Fiber Bragg Grating-Based Catheter Two-Dimensional Distal Force Sensor for Cardiac Catheterization. IEEE Sens. J. 2018, 18, 1539–1546. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
| R Square | Linearity | Standard Error | Hysteresis | |
|---|---|---|---|---|
| Ch. 1 | 0.996 | 0.021 | 0.017 | 2.01% |
| Ch. 2 | 0.993 | 0.019 | 0.020 | 2.04% |
| Ch. 3 | 0.989 | 0.022 | 0.017 | 1.89% |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Shin, D.; Kim, H.-U.; Kulkarni, A.; Kim, Y.-H.; Kim, T. Development of Force Sensor System Based on Tri-Axial Fiber Bragg Grating with Flexure Structure. Sensors 2022, 22, 16. https://doi.org/10.3390/s22010016
Shin D, Kim H-U, Kulkarni A, Kim Y-H, Kim T. Development of Force Sensor System Based on Tri-Axial Fiber Bragg Grating with Flexure Structure. Sensors. 2022; 22(1):16. https://doi.org/10.3390/s22010016
Chicago/Turabian StyleShin, Dongjoo, Hyeong-U Kim, Atul Kulkarni, Young-Hak Kim, and Taesung Kim. 2022. "Development of Force Sensor System Based on Tri-Axial Fiber Bragg Grating with Flexure Structure" Sensors 22, no. 1: 16. https://doi.org/10.3390/s22010016
APA StyleShin, D., Kim, H.-U., Kulkarni, A., Kim, Y.-H., & Kim, T. (2022). Development of Force Sensor System Based on Tri-Axial Fiber Bragg Grating with Flexure Structure. Sensors, 22(1), 16. https://doi.org/10.3390/s22010016