
Damage Localization and Severity Assessment of a Cable-Stayed Bridge Using a Message Passing Neural Network



Abstract
1. Introduction
2. Background
2.1. Practical Advanced Analysis Program (PAAP)
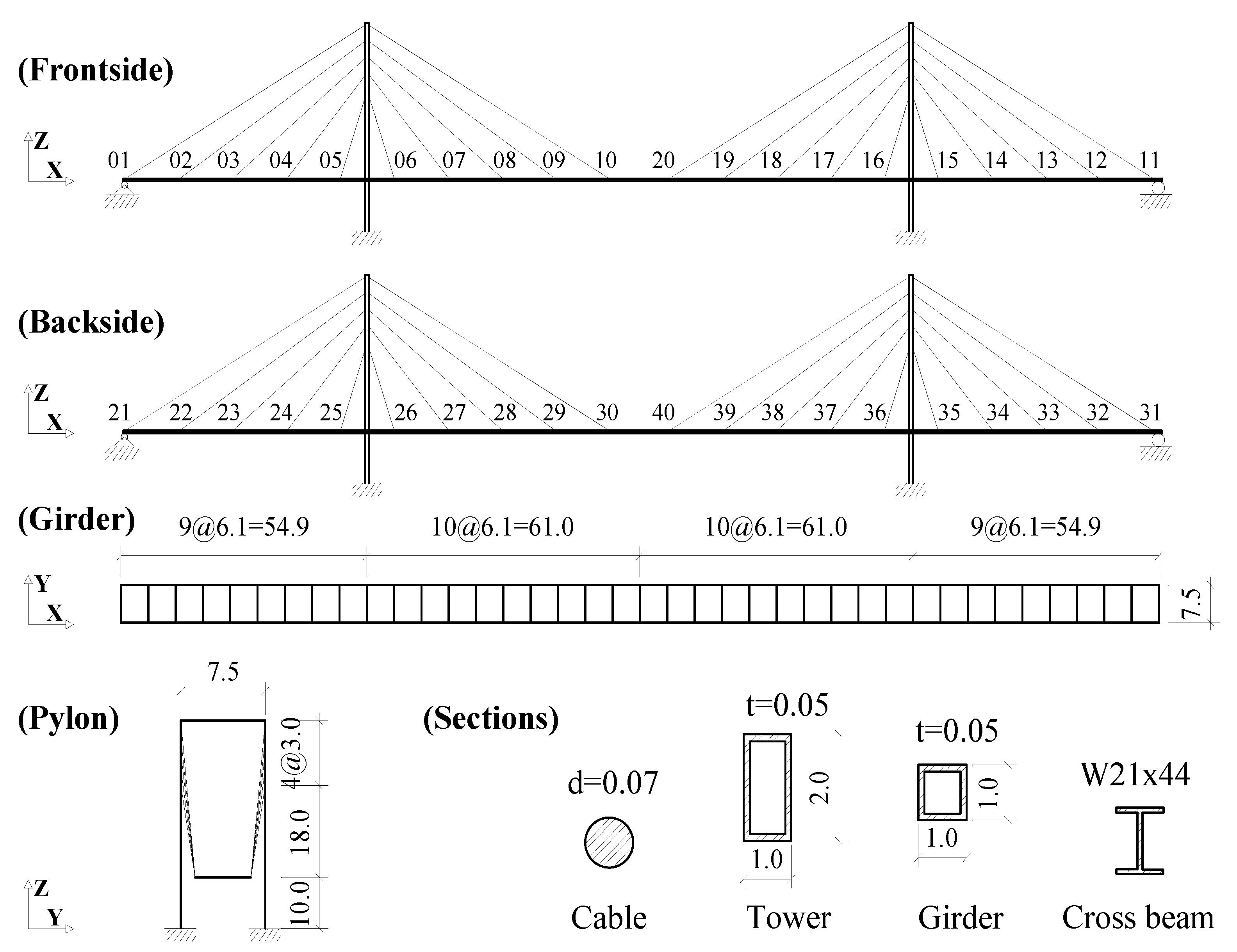
2.2. Cable-Stayed Bridge Model
2.3. Multilayer Percpetron
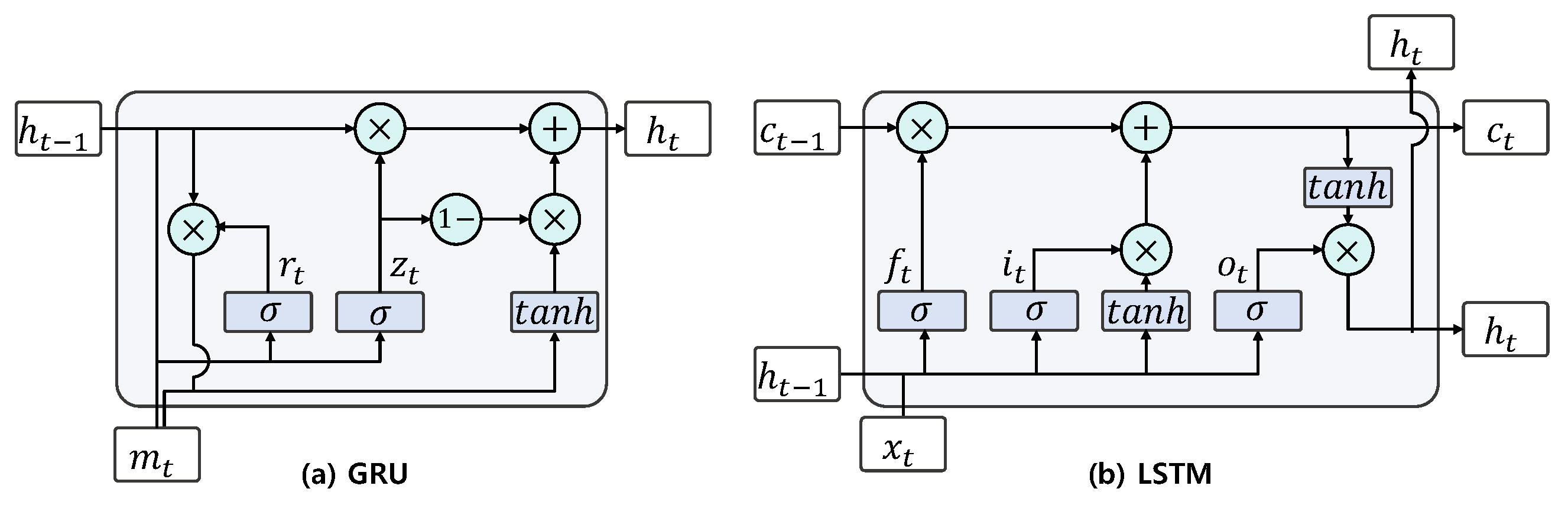
2.4. Recurrent Neural Network
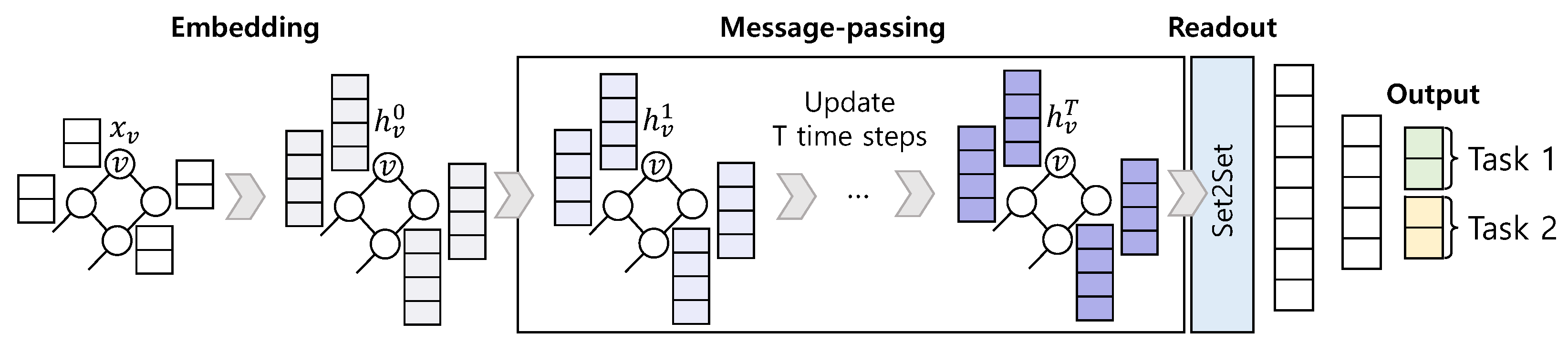
2.5. Message Passing Neural Network
3. Data Generating Procedure
3.1. Cable Damage Model
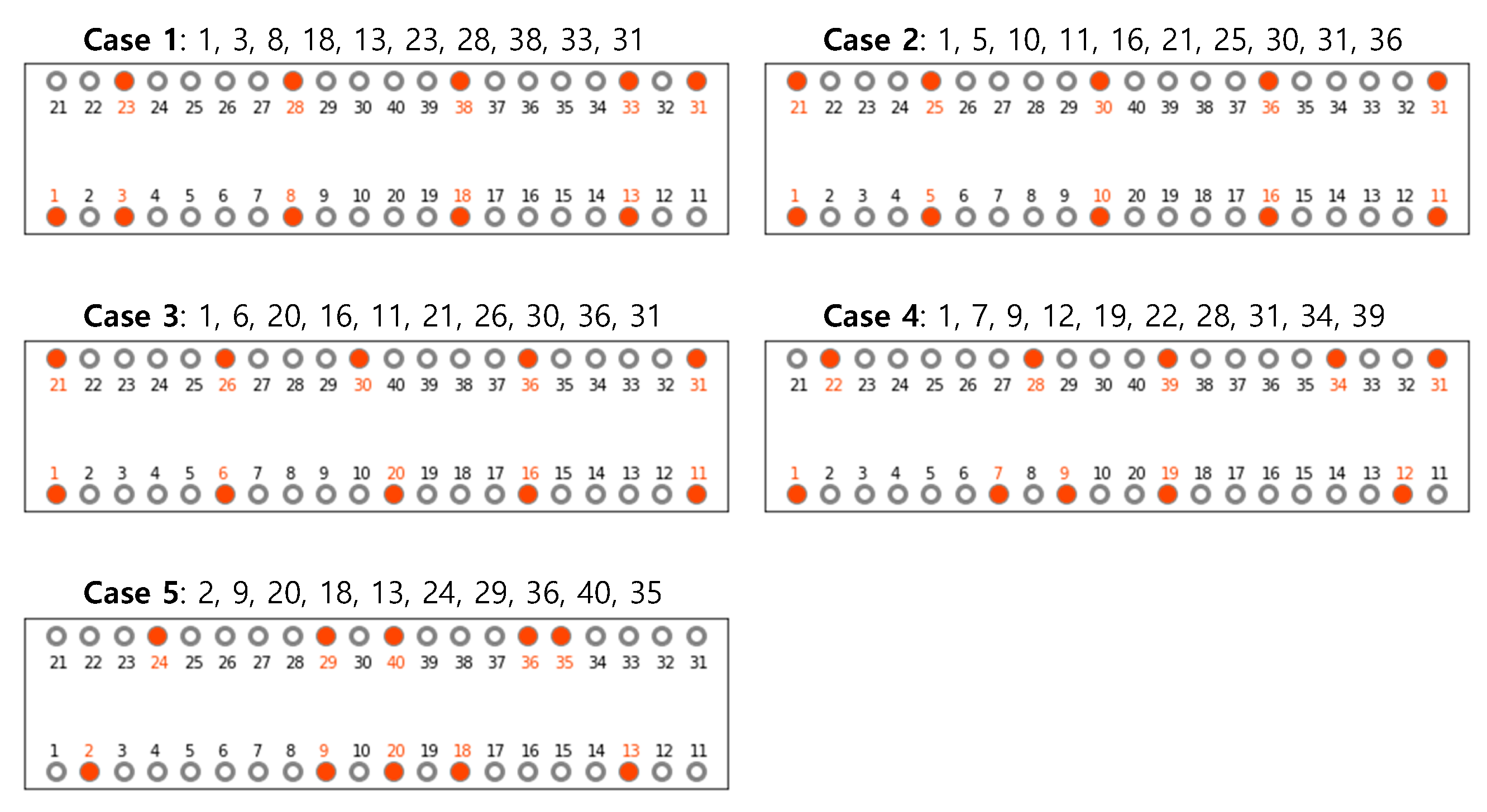
3.2. Observed Cables
3.3. Generating Data
4. Proposed Method for Damage Assessment
4.1. Configuration of the Proposed Network
4.2. Multi-Task Learning on MPNN
5. Performance Evaluation
5.1. Data Preprocessing and Optimization
5.2. Results
5.3. Discussion
5.3.1. Contribution
5.3.2. Limitation
5.3.3. Extension To Multiple Damaged Cables
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Conflicts of Interest
References
- Li, S.; Li, H.; Liu, Y.; Lan, C.; Zhou, W.; Ou, J. SMC structural health monitoring benchmark problem using monitored data from an actual cable-stayed bridge. Struct. Control Health Monit. 2014, 21, 156–172. [Google Scholar] [CrossRef]
- Kordestani, H.; Xiang, Y.Q.; Ye, X.W.; Yun, C.B.; Shadabfar, M. Localization of damaged cable in a tied-arch bridge using Arias intensity of seismic acceleration response. Struct. Control Health Monit. 2020, 27, e2491. [Google Scholar] [CrossRef]
- Das, R.; Pandey, S.A.; Mahesh, M.; Saini, P.; Anvesh, S. Effect of dynamic unloading of cables in collapse progression through a cable stayed bridge. Asian J. Civ. Eng. 2016, 17, 397–416. [Google Scholar]
- Santos, J.P.; Crémona, C.; Orcesi, A.D.; Silveira, P. Multivariate statistical analysis for early damage detection. Eng. Struct. 2013, 56, 273–285. [Google Scholar] [CrossRef]
- Khan, S.; Yairi, T. A review on the application of deep learning in system health management. Mech. Syst. Signal Process. 2018, 107, 241–265. [Google Scholar] [CrossRef]
- Sun, L.; Shang, Z.; Xia, Y.; Bhowmick, S.; Nagarajaiah, S. Review of bridge structural health monitoring aided by big data and artificial intelligence: From condition assessment to damage detection. J. Struct. Eng. 2020, 146, 04020073. [Google Scholar] [CrossRef]
- Pathirage, C.S.N.; Li, J.; Li, L.; Hao, H.; Liu, W.; Ni, P. Structural damage identification based on autoencoder neural networks and deep learning. Eng. Struct. 2018, 172, 13–28. [Google Scholar] [CrossRef]
- Gu, J.; Gul, M.; Wu, X. Damage detection under varying temperature using artificial neural networks. Struct. Control Health Monit. 2017, 24, e1998. [Google Scholar] [CrossRef]
- Truong, T.T.; Dinh-Cong, D.; Lee, J.; Nguyen-Thoi, T. An effective deep feedforward neural networks (DFNN) method for damage identification of truss structures using noisy incomplete modal data. J. Build. Eng. 2020, 30, 101244. [Google Scholar] [CrossRef]
- Chang, C.M.; Lin, T.K.; Chang, C.W. Applications of neural network models for structural health monitoring based on derived modal properties. Measurement 2018, 129, 457–470. [Google Scholar] [CrossRef]
- Abdeljaber, O.; Avci, O.; Kiranyaz, S.; Gabbouj, M.; Inman, D.J. Real-time vibration-based structural damage detection using one-dimensional convolutional neural networks. J. Sound Vib. 2017, 388, 154–170. [Google Scholar] [CrossRef]
- Azimi, M.; Eslamlou, A.D.; Pekcan, G. Data-Driven Structural Health Monitoring and Damage Detection through Deep Learning: State-of-the-Art Review. Sensors 2020, 20, 2778. [Google Scholar] [CrossRef] [PubMed]
- Cha, Y.J.; Choi, W.; Büyüköztürk, O. Deep learning-based crack damage detection using convolutional neural networks. Comput.-Aided Civ. Infrastruct. Eng. 2017, 32, 361–378. [Google Scholar] [CrossRef]
- Modarres, C.; Astorga, N.; Droguett, E.L.; Meruane, V. Convolutional neural networks for automated damage recognition and damage type identification. Struct. Control Health Monit. 2018, 25, e2230. [Google Scholar] [CrossRef]
- Gao, Y.; Mosalam, K.M. Deep transfer learning for image-based structural damage recognition. Comput.-Aided Civ. Infrastruct. Eng. 2018, 33, 748–768. [Google Scholar] [CrossRef]
- Kim, B.; Cho, S. Image-based concrete crack assessment using mask and region-based convolutional neural network. Struct. Control Health Monit. 2019, 26, e2381. [Google Scholar] [CrossRef]
- Thai, H.T.; Kim, S.E. Practical advanced analysis software for nonlinear inelastic analysis of space steel structures. Adv. Eng. Softw. 2009, 40, 786–797. [Google Scholar] [CrossRef]
- Ngo-Huu, C.; Nguyen, P.C.; Kim, S.E. Second-order plastic-hinge analysis of space semi-rigid steel frames. Thin-Walled Struct. 2012, 60, 98–104. [Google Scholar] [CrossRef]
- Nguyen, P.C.; Kim, S.E. Nonlinear inelastic time-history analysis of three-dimensional semi-rigid steel frames. J. Constr. Steel Res. 2014, 101, 192–206. [Google Scholar] [CrossRef]
- Truong, V.; Kim, S.E. An efficient method for reliability-based design optimization of nonlinear inelastic steel space frames. Struct. Multidiscip. Optim. 2017, 56, 331–351. [Google Scholar] [CrossRef]
- Thai, H.T.; Kim, S.E. Second-order inelastic analysis of cable-stayed bridges. Finite Elem. Anal. Des. 2012, 53, 48–55. [Google Scholar] [CrossRef]
- Kim, S.E.; Thai, H.T. Nonlinear inelastic dynamic analysis of suspension bridges. Eng. Struct. 2010, 32, 3845–3856. [Google Scholar] [CrossRef]
- Kim, S.E.; Thai, H.T. Second-order inelastic analysis of steel suspension bridges. Finite Elem. Anal. Des. 2011, 47, 351–359. [Google Scholar] [CrossRef]
- Dai, K.; Li, A.; Zhang, H.; Chen, S.E.; Pan, Y. Surface damage quantification of postearthquake building based on terrestrial laser scan data. Struct. Control Health Monit. 2018, 25, e2210. [Google Scholar] [CrossRef]
- Farahani, B.V.; Barros, F.; Sousa, P.J.; Cacciari, P.P.; Tavares, P.J.; Futai, M.M.; Moreira, P. A coupled 3D laser scanning and digital image correlation system for geometry acquisition and deformation monitoring of a railway tunnel. Tunn. Undergr. Space Technol. 2019, 91, 102995. [Google Scholar] [CrossRef]
- Sajedi, S.O.; Liang, X. Vibration-based semantic damage segmentation for large-scale structural health monitoring. Comput.-Aided Civ. Infrastruct. Eng. 2020, 35, 579–596. [Google Scholar] [CrossRef]
- Olsen, M.J.; Kuester, F.; Chang, B.J.; Hutchinson, T.C. Terrestrial laser scanning-based structural damage assessment. J. Comput. Civ. Eng. 2010, 24, 264–272. [Google Scholar] [CrossRef]
- Suchocki, C.; Jagoda, M.; Obuchovski, R.; Šlikas, D.; Sužiedelytė-Visockienė, J. The properties of terrestrial laser system intensity in measurements of technical conditions of architectural structures. Metrol. Meas. Syst. 2018, 25, 779–792. [Google Scholar]
- Song, M.; Yousefianmoghadam, S.; Mohammadi, M.E.; Moaveni, B.; Stavridis, A.; Wood, R.L. An application of finite element model updating for damage assessment of a two-story reinforced concrete building and comparison with lidar. Struct. Health Monit. 2018, 17, 1129–1150. [Google Scholar] [CrossRef]
- Li, Y.; Yu, R.; Shahabi, C.; Liu, Y. Diffusion Convolutional Recurrent Neural Network: Data-Driven Traffic Forecasting. In Proceedings of the 6th International Conference on Learning Representations, ICLR 2018, Vancouver, BC, Canada, 30 April–3 May 2018. [Google Scholar]
- Yu, B.; Yin, H.; Zhu, Z. Spatio-Temporal Graph Convolutional Networks: A Deep Learning Framework for Traffic Forecasting. In Proceedings of the Twenty-Seventh International Joint Conference on Artificial Intelligence, IJCAI 2018, Stockholm, Sweden, 13–19 July 2018; Lang, J., Ed.; pp. 3634–3640. [Google Scholar] [CrossRef]
- Monti, F.; Bronstein, M.; Bresson, X. Geometric matrix completion with recurrent multi-graph neural networks. Adv. Neural Inf. Process. Syst. 2017. Available online: https://arxiv.org/abs/1704.06803 (accessed on 1 April 2021).
- Ying, R.; He, R.; Chen, K.; Eksombatchai, P.; Hamilton, W.L.; Leskovec, J. Graph Convolutional Neural Networks for Web-Scale Recommender Systems. In Proceedings of the 24th ACM SIGKDD International Conference on Knowledge Discovery & Data Mining, KDD 2018, London, UK, 19–23 August 2018; Guo, Y., Farooq, F., Eds.; ACM: New York, NY, USA, 2018; pp. 974–983. [Google Scholar] [CrossRef]
- Gilmer, J.; Schoenholz, S.S.; Riley, P.F.; Vinyals, O.; Dahl, G.E. Neural Message Passing for Quantum Chemistry. In Proceedings of the 34th International Conference on Machine Learning, ICML 2017, Sydney, Australia, 6–11 August 2017; Precup, D., Teh, Y.W., Eds.; Volume 70, pp. 1263–1272. [Google Scholar]
- Marcheggiani, D.; Titov, I. Encoding Sentences with Graph Convolutional Networks for Semantic Role Labeling. In Proceedings of the 2017 Conference on Empirical Methods in Natural Language Processing, EMNLP 2017, Copenhagen, Denmark, 9–11 September 2017; Palmer, M., Hwa, R., Riedel, S., Eds.; Association for Computational Linguistics: Stroudsburg, PA, USA, 2017; pp. 1506–1515. [Google Scholar] [CrossRef]
- Peng, H.; Li, J.; He, Y.; Liu, Y.; Bao, M.; Wang, L.; Song, Y.; Yang, Q. Large-scale hierarchical text classification with recursively regularized deep graph-cnn. In Proceedings of the 2018 World Wide Web Conference, Lyon, France, 23–27 April 2018; pp. 1063–1072. [Google Scholar]
- Li, S.; Niu, J.; Li, Z. Novelty detection of cable-stayed bridges based on cable force correlation exploration using spatiotemporal graph convolutional networks. Struct. Health Monit. 2021. [Google Scholar] [CrossRef]
- Caruana, R. Multitask learning. Mach. Learn. 1997, 28, 41–75. [Google Scholar] [CrossRef]
- Yang, Y.B.; Shieh, M.S. Solution method for nonlinear problems with multiple critical points. AIAA J. 1990, 28, 2110–2116. [Google Scholar] [CrossRef]
- Thai, H.T.; Kim, S.E. Nonlinear static and dynamic analysis of cable structures. Finite Elem. Anal. Des. 2011, 47, 237–246. [Google Scholar] [CrossRef]
- Rumpf, H. The characteristics of systems and their changes of state disperse. In Particle Technology, Chapman and Hall; Springer: Berlin/Heidelberg, Germany, 1990; pp. 8–54. [Google Scholar]
- Chen, W.F.; Kim, S.E. LRFD Steel Design Using Advanced Analysis; CRC Press: Boca Raton, FL, USA, 1997; Volume 13. [Google Scholar]
- Kim, S.E.; Kim, M.K.; Chen, W.F. Improved refined plastic hinge analysis accounting for strain reversal. Eng. Struct. 2000, 22, 15–25. [Google Scholar] [CrossRef]
- Cho, K.; van Merrienboer, B.; Gülçehre, Ç.; Bahdanau, D.; Bougares, F.; Schwenk, H.; Bengio, Y. Learning Phrase Representations using RNN Encoder-Decoder for Statistical Machine Translation. In Proceedings of the 2014 Conference on Empirical Methods in Natural Language Processing, EMNLP 2014, Doha, Qatar, 25–29 October 2014; pp. 1724–1734. [Google Scholar] [CrossRef]
- Vinyals, O.; Bengio, S.; Kudlur, M. Order Matters: Sequence to sequence for sets. In Proceedings of the 4th International Conference on Learning Representations, ICLR 2016, San Juan, Puerto Rico, 2–4 May 2016; Conference Track Proceedings. Bengio, Y., LeCun, Y., Eds.; 2016. [Google Scholar]
- Nazarian, E.; Ansari, F.; Zhang, X.; Taylor, T. Detection of tension loss in cables of cable-stayed bridges by distributed monitoring of bridge deck strains. J. Struct. Eng. 2016, 142, 04016018. [Google Scholar] [CrossRef]
- Zhang, L.; Qiu, G.; Chen, Z. Structural health monitoring methods of cables in cable-stayed bridge: A review. Measurement 2021, 168, 108343. [Google Scholar] [CrossRef]
- Zhang, J.; Au, F. Effect of baseline calibration on assessment of long-term performance of cable-stayed bridges. Appear. Eng. Fail. Anal. 2013, 35, 234–246. [Google Scholar] [CrossRef]
- Ho, H.N.; Kim, K.D.; Park, Y.S.; Lee, J.J. An efficient image-based damage detection for cable surface in cable-stayed bridges. NDT E Int. 2013, 58, 18–23. [Google Scholar] [CrossRef]
- Hassona, F.; Hashem, M.D.; Abdelmalak, R.I.; Hakeem, B.M. Bumps at bridge approaches: Two case studies for bridges at El-Minia Governorate, Egypt. In International Congress and Exhibition “Sustainable Civil Infrastructures: Innovative Infrastructure Geotechnology”; Springer: Berlin/Heidelberg, Germany, 2017; pp. 265–280. [Google Scholar]
- Thai, H.T.; Kim, S.E. Large deflection inelastic analysis of space trusses using generalized displacement control method. J. Constr. Steel Res. 2009, 65, 1987–1994. [Google Scholar] [CrossRef]
- Shuman, D.I.; Narang, S.K.; Frossard, P.; Ortega, A.; Vandergheynst, P. The emerging field of signal processing on graphs: Extending high-dimensional data analysis to networks and other irregular domains. IEEE Signal Process. Mag. 2013, 30, 83–98. [Google Scholar] [CrossRef]
- Bergstra, J.; Bardenet, R.; Bengio, Y.; Kégl, B. Algorithms for hyper-parameter optimization. In Proceedings of the 25th annual conference on neural information processing systems (NIPS 2011), Neural Information Processing Systems Foundation, Granada, Spain, 12–14 December 2011; Volume 24. [Google Scholar]
- Li, L.; Jamieson, K.G.; Rostamizadeh, A.; Gonina, E.; Ben-tzur, J.; Hardt, M.; Recht, B.; Talwalkar, A. A System for Massively Parallel Hyperparameter Tuning. In Proceedings of the Machine Learning and Systems 2020, MLSys 2020, Austin, TX, USA, 2–4 March 2020. [Google Scholar]
- Kingma, D.P.; Ba, J. Adam: A Method for Stochastic Optimization. In Proceedings of the 3rd International Conference on Learning Representations, ICLR 2015, San Diego, CA, USA, 7–9 May 2015. [Google Scholar]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Step 1. | Input structural geometry, material configurations and set applied loads. |
| Step 2. | Generate M samples of 40 cables of system , where is the cross-section area of damaged cable jth in sample ith, that is determined as shown Equation (24). |
| Step 3. | Calculate the tension of 10 observed cables that mentioned in Section 3.2 corresponding to the sample using the PAAP, where is the measured tension of cable in sample . |
| Step 4. | Save the input and output data to result files. |
| Optimal Values | |||||||
|---|---|---|---|---|---|---|---|
| Model | Hyperparameter | Range | Case 1 | Case 2 | Case 3 | Case 4 | Case 5 |
| MPNN | Batch size | [16, 32, 64, 128] | 16, 16, 16 | 32, 32, 16 | 32, 16, 32 | 16, 16, 16 | 16, 16, 32 |
| Learning rate | [0.00001∼0.001] | 0.00095, 0.00018, 0.00078 | 0.00029, 0.00081, 0.00047 | 0.00070, 0.00043, 0.00076 | 0.00036, 0.00016, 0.00040 | 0.00030, 0.00092, 0.00098 | |
| Vertex embedding dim | [8, 16, 32, 64, 128] | 32, 128, 128 | 128, 32, 128 | 128, 128, 128 | 64, 128, 64 | 64, 64, 128 | |
| Hidden state dims | [8, 16, 32, 64, 128] | 16, 16, 32 | 32, 64, 16 | 8, 8, 16 | 8, 64, 16 | 16, 8, 8 | |
| # of message passing steps | [3, 4, 5, 6] | 3, 5, 5 | 6, 4, 3 | 6, 6, 5 | 5, 6, 5 | 4, 4, 3 | |
| # of set2set computations | [1, 2, 3, 4, 5] | 5, 2, 1 | 1, 5, 1 | 4, 5, 2 | 1, 4, 1 | 4, 5, 5 | |
| # of LSTM layers | [1, 2, 3] | 2, 3, 3 | 2, 2, 2 | 2, 1, 2 | 3, 1, 2 | 3, 1, 2 | |
| MLP | Batch size | [16, 32, 64, 128] | 32, 64, 128 | 32, 16, 8 | 16, 128, 16 | 32, 32, 32 | 128, 32, 128 |
| Learning rate | [0.00001∼0.001] | 0.00038, 0.00015, 0.00054 | 0.00003, 0.00044, 0.00029 | 0.00017, 0.00013, 0.00014 | 0.00049, 0.00015, 0.00031 | 0.00025, 0.00044, 0.00072 | |
| # of hidden neurons in the hidden layer 1 | [32, 64, 128, 256, 512, 1024, 2048] | 1024, 256 1024, | 1024, 32, 512 | 1024, 512, 512 | 64, 128, 128 | 2048, 256, 512 | |
| # of hidden neurons in the hidden layer 2 | [32, 64, 128, 256, 512, 1024, 2048] | 512, 64, 512 | 2048, 64, 512 | 256, 2048, 2048 | 32, 1024, 1024 | 2048, 128, 512 | |
| # of hidden neurons in the hidden layer 3 | [32, 64, 128, 256, 512, 1024, 2048] | 2048, 512, 64 | 2048, 512, 2048 | 256, 256, 1024 | 128, 256, 2048 | 1024, 512, 32 | |
| # of hidden neurons in the hidden layer 4 | [32, 64, 128, 256, 512, 1024, 2048] | 128, 2048, 512 | 1024, 32, 128 | 256, 64, 1024 | 1024, 128, 64 | 256, 128, 2048 | |
| Dropout rate | [0.1, 0.2, 0.3, 0.4, 0.5, 0.6, 0.7] | 0.1, 0.3, 0.3 | 0.2, 0.1, 0.1 | 0.5, 0.2, 0.2 | 0.1, 0.2, 0.2 | 0.2, 0.1, 0.1 | |
| XGBoost | Minimum sum of instance weight | [1, 5, 10] | 1, 5 | 1, 5 | 1, 10 | 1, 1 | 1, 1 |
| gamma | [0.5, 1, 1.5, 2, 5] | 0.5, 1 | 2, 1 | 1, 0.5 | 2, 0.5 | 0.5, 0.5 | |
| Subsample ratio of the training instance | [0.6, 0.8, 1.0] | 0.6, 1.0 | 0.8, 1.0 | 1.0, 1.0 | 0.6, 1.0 | 0.8, 0.6 | |
| Subsample ratio of columns when constructing each tree | [0.6, 0.8, 1.0] | 0.6, 1.0 | 0.8, 0.6 | 0.8, 1.0 | 1.0, 0.8 | 0.6, 1.0 | |
| Maximum tree depth | [3, 4, 5] | 3, 5 | 3, 5 | 3, 5 | 4, 5 | 5, 5 | |
| Case 1 | Case 2 | Case 3 | Case 4 | Case 5 | ||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| MTL | Single | MTL | Single | MTL | Single | MTL | Single | MTL | Single | |||
| XGBoost | Class | Acc (%) | - | 97.25 | - | 97.08 | - | 97.5 | - | 97.83 | - | 98.5 |
| MAE | - | 0.1518 | - | 0.1451 | - | 0.1422 | - | 0.1506 | - | 0.1487 | ||
| Reg | RMSE | - | 0.1837 | - | 0.1748 | - | 0.1713 | - | 0.1829 | - | 0.1806 | |
| Corr | - | 0.9093 | - | 0.9253 | - | 0.9062 | - | 0.9084 | - | 0.8815 | ||
| MLP | Class | Acc (%) | 98.33 | 98.08 | 93.58 | 95 | 97.17 | 94.17 | 94 | 95 | 97.08 | 98.08 |
| MAE | 0.0249 | 0.0832 | 0.059 | 0.0369 | 0.0679 | 0.0166 | 0.0492 | 0.112 | 0.0408 | 0.0877 | ||
| Reg | RMSE | 0.0327 | 0.1603 | 0.0827 | 0.0897 | 0.0788 | 0.0314 | 0.0613 | 0.1669 | 0.0611 | 0.1608 | |
| Corr | 0.9953 | 0.8321 | 0.9699 | 0.9541 | 0.9734 | 0.9944 | 0.9885 | 0.831 | 0.9807 | 0.8261 | ||
| MPNN | Class | Acc (%) | 99.08 | 98.83 | 98.67 | 99.17 | 99.33 | 99.25 | 97.75 | 98.33 | 98.92 | 99.17 |
| MAE | 0.0093 | 0.009 | 0.005 | 0.008 | 0.0035 | 0.0028 | 0.0104 | 0.0265 | 0.007 | 0.0046 | ||
| Reg | RMSE | 0.0331 | 0.0433 | 0.0121 | 0.0282 | 0.0069 | 0.0066 | 0.0175 | 0.0843 | 0.0138 | 0.0199 | |
| Corr | 0.9934 | 0.9884 | 0.9991 | 0.9951 | 0.9997 | 0.9997 | 0.9981 | 0.9552 | 0.9988 | 0.9976 | ||
| Case 1 | Case 2 | Case 3 | Case 4 | Case 5 | |||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| Area | MTL | Single | MTL | Single | MTL | Single | MTL | Single | MTL | Single | |
| XGBoost | 0.00∼0.69 | - | 99.88 | - | 99.88 | - | 100 | - | 100 | - | 100 |
| 0.70∼0.79 | - | 100 | - | 100 | - | 100 | - | 100 | - | 100 | |
| 0.80∼0.89 | - | 100 | - | 100 | - | 100 | - | 100 | - | 100 | |
| 0.90∼0.99 | - | 67.35 | - | 65.31 | - | 69.39 | - | 73.47 | - | 81.63 | |
| MLP | 0.00∼0.69 | 100 | 100 | 97.9 | 99.42 | 100 | 99.42 | 98.36 | 100 | 99.42 | 100 |
| 0.70∼0.79 | 100 | 100 | 95.87 | 99.17 | 99.17 | 99.17 | 95.04 | 100 | 95.87 | 100 | |
| 0.80∼0.89 | 100 | 100 | 90.4 | 92.8 | 96 | 88 | 88 | 84.8 | 96 | 99.2 | |
| 0.90∼0.99 | 79.59 | 76.53 | 57.14 | 54.08 | 71.43 | 50 | 62.24 | 58.16 | 79.59 | 77.55 | |
| MPNN | 0.00∼0.69 | 100 | 100 | 100 | 100 | 100 | 100 | 100 | 100 | 100 | 100 |
| 0.70∼0.79 | 100 | 100 | 100 | 100 | 100 | 100 | 100 | 100 | 100 | 100 | |
| 0.80∼0.89 | 100 | 100 | 100 | 100 | 100 | 100 | 99.2 | 100 | 100 | 100 | |
| 0.90∼0.99 | 88.78 | 85.71 | 83.67 | 89.8 | 91.84 | 90.82 | 73.47 | 79.59 | 86.73 | 89.8 | |
| Case 1 | Case 2 | Case 3 | Case 4 | Case 5 | ||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Y | N | Y | N | Y | N | Y | N | Y | N | |||
| XGBoost | Single-C | Acc (%) | 97.32 | 97.23 | 97.22 | 97.04 | 98.29 | 97.24 | 96.98 | 98.12 | 98.66 | 98.45 |
| MAE | 0.1462 | 0.1536 | 0.1508 | 0.1434 | 0.1359 | 0.1443 | 0.1489 | 0.1512 | 0.1437 | 0.1503 | ||
| Single-R | RMSE | 0.1755 | 0.1863 | 0.1749 | 0.1748 | 0.1603 | 0.1747 | 0.1797 | 0.1839 | 0.1714 | 0.1836 | |
| Corr | 0.9627 | 0.8929 | 0.9318 | 0.9288 | 0.9472 | 0.8964 | 0.9439 | 0.8954 | 0.9103 | 0.8737 | ||
| MLP | MTL-C | Acc (%) | 100 | 97.78 | 99.65 | 91.67 | 96.25 | 97.46 | 100 | 92.02 | 100 | 96.12 |
| MAE | 0.0207 | 0.0262 | 0.059 | 0.059 | 0.0756 | 0.0654 | 0.0496 | 0.0491 | 0.0386 | 0.0415 | ||
| MTL-R | RMSE | 0.0256 | 0.0348 | 0.0717 | 0.0859 | 0.0874 | 0.0758 | 0.059 | 0.062 | 0.0445 | 0.0657 | |
| Corr | 0.9974 | 0.9947 | 0.9858 | 0.9651 | 0.9634 | 0.9766 | 0.9978 | 0.9856 | 0.9924 | 0.977 | ||
| Single-C | Acc (%) | 100 | 97.45 | 98.96 | 93.75 | 96.93 | 93.27 | 100 | 93.35 | 100 | 97.45 | |
| MAE | 0.0345 | 0.0993 | 0.0266 | 0.0402 | 0.0297 | 0.0124 | 0.0737 | 0.1246 | 0.0292 | 0.1071 | ||
| Single-R | RMSE | 0.0517 | 0.1825 | 0.0316 | 0.1013 | 0.0554 | 0.0177 | 0.0814 | 0.1867 | 0.0392 | 0.1842 | |
| Corr | 0.9935 | 0.7773 | 0.9992 | 0.9398 | 0.9836 | 0.9983 | 0.9937 | 0.764 | 0.9979 | 0.7689 | ||
| MPNN | MTL-C | Acc (%) | 99.66 | 98.89 | 99.65 | 98.36 | 100 | 99.12 | 99.66 | 97.12 | 100 | 98.56 |
| MAE | 0.0098 | 0.0092 | 0.0059 | 0.0047 | 0.0024 | 0.0038 | 0.0063 | 0.0117 | 0.0058 | 0.0074 | ||
| MTL-R | RMSE | 0.057 | 0.0196 | 0.0201 | 0.0081 | 0.0048 | 0.0075 | 0.0118 | 0.019 | 0.012 | 0.0143 | |
| Corr | 0.9823 | 0.9977 | 0.9976 | 0.9996 | 0.9999 | 0.9997 | 0.9992 | 0.9978 | 0.9991 | 0.9987 | ||
| Single-C | Acc (%) | 99.33 | 98.67 | 100 | 98.9 | 100 | 99.01 | 99.33 | 98 | 99.33 | 99.11 | |
| MAE | 0.0041 | 0.0107 | 0.0038 | 0.0093 | 0.0019 | 0.0031 | 0.0089 | 0.0324 | 0.0017 | 0.0055 | ||
| Single-R | RMSE | 0.0216 | 0.0484 | 0.0175 | 0.0308 | 0.0043 | 0.0071 | 0.0545 | 0.092 | 0.0087 | 0.0225 | |
| Corr | 0.9971 | 0.9856 | 0.9983 | 0.9942 | 0.9999 | 0.9997 | 0.9828 | 0.945 | 0.9995 | 0.997 | ||
| MTL-Classification | MTL-Regression | Single-Classification | Single-Regression | |||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Cables | Acc | Prec | Recall | F1 | MAE | RMSE | Corr | Acc | Prec | Recall | F1 | MAE | RMSE | Corr |
| 1 | 1 | 1 | 1 | 1 | 0.0029 | 0.0095 | 0.99953 | 1 | 1 | 1 | 1 | 0.0007 | 0.0009 | 0.99999 |
| 2 | 1 | 1 | 1 | 1 | 0.0035 | 0.0037 | 0.99998 | 1 | 1 | 1 | 1 | 0.0011 | 0.0022 | 0.99997 |
| 3 | 1 | 1 | 1 | 1 | 0.005 | 0.0054 | 0.99997 | 1 | 1 | 1 | 1 | 0.0009 | 0.0014 | 0.99998 |
| 4 | 0.97 | 1 | 0.97 | 0.99 | 0.0033 | 0.004 | 0.99996 | 0.97 | 1 | 0.97 | 0.99 | 0.005 | 0.0091 | 0.99944 |
| 5 | 1 | 0.97 | 1 | 0.98 | 0.0036 | 0.0038 | 0.99999 | 1 | 0.94 | 1 | 0.97 | 0.0056 | 0.0124 | 0.99955 |
| 6 | 1 | 1 | 1 | 1 | 0.0018 | 0.0023 | 0.99998 | 1 | 1 | 1 | 1 | 0.0011 | 0.0017 | 0.99998 |
| 7 | 1 | 1 | 1 | 1 | 0.0035 | 0.0117 | 0.9993 | 1 | 1 | 1 | 1 | 0.0033 | 0.008 | 0.99971 |
| 8 | 1 | 1 | 1 | 1 | 0.0014 | 0.0021 | 0.99997 | 1 | 1 | 1 | 1 | 0.0023 | 0.0045 | 0.9999 |
| 9 | 1 | 1 | 1 | 1 | 0.0022 | 0.0062 | 0.99977 | 1 | 1 | 1 | 1 | 0.0008 | 0.0014 | 0.99999 |
| 10 | 1 | 1 | 1 | 1 | 0.004 | 0.0103 | 0.99951 | 1 | 1 | 1 | 1 | 0.001 | 0.0017 | 0.99999 |
| 11 | 1 | 1 | 1 | 1 | 0.0017 | 0.002 | 0.99999 | 1 | 1 | 1 | 1 | 0.0021 | 0.0065 | 0.99979 |
| 12 | 1 | 1 | 1 | 1 | 0.0017 | 0.0025 | 0.99997 | 1 | 1 | 1 | 1 | 0.001 | 0.002 | 0.99998 |
| 13 | 0.96 | 1 | 0.96 | 0.98 | 0.0023 | 0.0035 | 0.99993 | 0.96 | 1 | 0.96 | 0.98 | 0.0022 | 0.0052 | 0.99989 |
| 14 | 0.91 | 1 | 0.91 | 0.95 | 0.0024 | 0.0031 | 0.99998 | 0.91 | 1 | 0.91 | 0.95 | 0.0115 | 0.0194 | 0.9989 |
| 15 | 1 | 0.89 | 1 | 0.94 | 0.0028 | 0.0035 | 0.99998 | 1 | 0.89 | 1 | 0.94 | 0.0065 | 0.0118 | 0.99917 |
| 16 | 1 | 1 | 1 | 1 | 0.002 | 0.0024 | 0.99999 | 1 | 1 | 1 | 1 | 0.0012 | 0.0022 | 0.99997 |
| 17 | 1 | 1 | 1 | 1 | 0.0012 | 0.0014 | 1 | 1 | 1 | 1 | 1 | 0.0017 | 0.003 | 0.99995 |
| 18 | 1 | 1 | 1 | 1 | 0.0027 | 0.0074 | 0.99972 | 1 | 1 | 1 | 1 | 0.0031 | 0.0067 | 0.9998 |
| 19 | 1 | 1 | 1 | 1 | 0.0028 | 0.0112 | 0.99943 | 1 | 1 | 1 | 1 | 0.0024 | 0.0063 | 0.99984 |
| 20 | 1 | 1 | 1 | 1 | 0.0016 | 0.0038 | 0.99992 | 1 | 1 | 1 | 1 | 0.0026 | 0.0037 | 0.99993 |
| 21 | 1 | 1 | 1 | 1 | 0.0008 | 0.0014 | 0.99999 | 1 | 1 | 1 | 1 | 0.0019 | 0.0051 | 0.99989 |
| 22 | 1 | 1 | 1 | 1 | 0.0045 | 0.0049 | 0.99993 | 1 | 1 | 1 | 1 | 0.0019 | 0.0048 | 0.99989 |
| 23 | 0.97 | 1 | 0.97 | 0.99 | 0.0054 | 0.0061 | 0.99994 | 0.97 | 1 | 0.97 | 0.99 | 0.0026 | 0.0034 | 0.99993 |
| 24 | 1 | 0.95 | 1 | 0.98 | 0.0014 | 0.0018 | 0.99998 | 1 | 1 | 1 | 1 | 0.0015 | 0.0025 | 0.99997 |
| 25 | 1 | 0.97 | 1 | 0.98 | 0.0028 | 0.0043 | 0.99991 | 0.97 | 0.97 | 0.97 | 0.97 | 0.0037 | 0.0069 | 0.99977 |
| 26 | 1 | 1 | 1 | 1 | 0.003 | 0.0046 | 0.99992 | 1 | 1 | 1 | 1 | 0.003 | 0.006 | 0.99979 |
| 27 | 1 | 1 | 1 | 1 | 0.0017 | 0.0024 | 0.99996 | 1 | 1 | 1 | 1 | 0.0015 | 0.0036 | 0.99992 |
| 28 | 1 | 1 | 1 | 1 | 0.0039 | 0.0043 | 0.99999 | 1 | 1 | 1 | 1 | 0.0031 | 0.0062 | 0.99981 |
| 29 | 1 | 1 | 1 | 1 | 0.0024 | 0.003 | 0.99997 | 1 | 1 | 1 | 1 | 0.0021 | 0.0044 | 0.99992 |
| 30 | 1 | 1 | 1 | 1 | 0.0018 | 0.0027 | 0.99996 | 1 | 1 | 1 | 1 | 0.0018 | 0.0038 | 0.99993 |
| 31 | 1 | 0.97 | 1 | 0.99 | 0.0049 | 0.0081 | 0.99981 | 1 | 1 | 1 | 1 | 0.0022 | 0.0044 | 0.99993 |
| 32 | 0.97 | 1 | 0.97 | 0.98 | 0.0025 | 0.0055 | 0.99988 | 0.97 | 1 | 0.97 | 0.98 | 0.0034 | 0.0068 | 0.99985 |
| 33 | 1 | 1 | 1 | 1 | 0.0065 | 0.0072 | 0.99995 | 1 | 0.97 | 1 | 0.98 | 0.0043 | 0.0077 | 0.99974 |
| 34 | 1 | 1 | 1 | 1 | 0.0031 | 0.004 | 0.99992 | 1 | 1 | 1 | 1 | 0.0047 | 0.006 | 0.99995 |
| 35 | 1 | 1 | 1 | 1 | 0.0223 | 0.027 | 0.9958 | 1 | 0.97 | 1 | 0.99 | 0.0081 | 0.0127 | 0.9991 |
| 36 | 1 | 1 | 1 | 1 | 0.0027 | 0.003 | 0.99998 | 1 | 1 | 1 | 1 | 0.0019 | 0.004 | 0.99992 |
| 37 | 1 | 1 | 1 | 1 | 0.0019 | 0.0024 | 0.99997 | 1 | 1 | 1 | 1 | 0.0013 | 0.0017 | 0.99999 |
| 38 | 0.97 | 1 | 0.97 | 0.98 | 0.0044 | 0.0053 | 0.99994 | 0.97 | 1 | 0.97 | 0.98 | 0.001 | 0.0016 | 0.99998 |
| 39 | 1 | 1 | 1 | 1 | 0.0023 | 0.0026 | 0.99997 | 1 | 1 | 1 | 1 | 0.0015 | 0.0024 | 0.99997 |
| 40 | 1 | 1 | 1 | 1 | 0.0029 | 0.0032 | 0.99994 | 1 | 1 | 1 | 1 | 0.0026 | 0.0035 | 0.99989 |
| Q5 | 0.97 | 0.97 | 0.97 | 0.98 | 0.00139 | 0.00178 | 0.99942 | 0.96 | 0.95 | 0.96 | 0.97 | 0.0009 | 0.0014 | 0.99917 |
| Q95 | 1 | 1 | 1 | 1 | 0.00545 | 0.01122 | 0.99999 | 1 | 1 | 1 | 1 | 0.00658 | 0.01241 | 0.99999 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Son, H.; Pham, V.-T.; Jang, Y.; Kim, S.-E. Damage Localization and Severity Assessment of a Cable-Stayed Bridge Using a Message Passing Neural Network. Sensors 2021, 21, 3118. https://doi.org/10.3390/s21093118
Son H, Pham V-T, Jang Y, Kim S-E. Damage Localization and Severity Assessment of a Cable-Stayed Bridge Using a Message Passing Neural Network. Sensors. 2021; 21(9):3118. https://doi.org/10.3390/s21093118
Chicago/Turabian StyleSon, Hyesook, Van-Thanh Pham, Yun Jang, and Seung-Eock Kim. 2021. "Damage Localization and Severity Assessment of a Cable-Stayed Bridge Using a Message Passing Neural Network" Sensors 21, no. 9: 3118. https://doi.org/10.3390/s21093118
APA StyleSon, H., Pham, V.-T., Jang, Y., & Kim, S.-E. (2021). Damage Localization and Severity Assessment of a Cable-Stayed Bridge Using a Message Passing Neural Network. Sensors, 21(9), 3118. https://doi.org/10.3390/s21093118