
Design and Experimental Characterization of a Discovery and Tracking System for Optical Camera Communications †

 ,
,  ,
,  ,
,  and
and 
Abstract
1. Introduction
2. Proposed System
2.1. Transmitter
2.2. Receiver
2.3. Discovery and Tracking Proposed Architecture
2.3.1. Discovery Algorithm
2.3.2. Tracking Algorithm
2.3.3. Adjustment of Detection
3. Materials and Methods
3.1. Methods and Metrics
3.2. Experiment Setup
4. Results
4.1. Discovery Algorithm
4.2. Tracking Algorithm
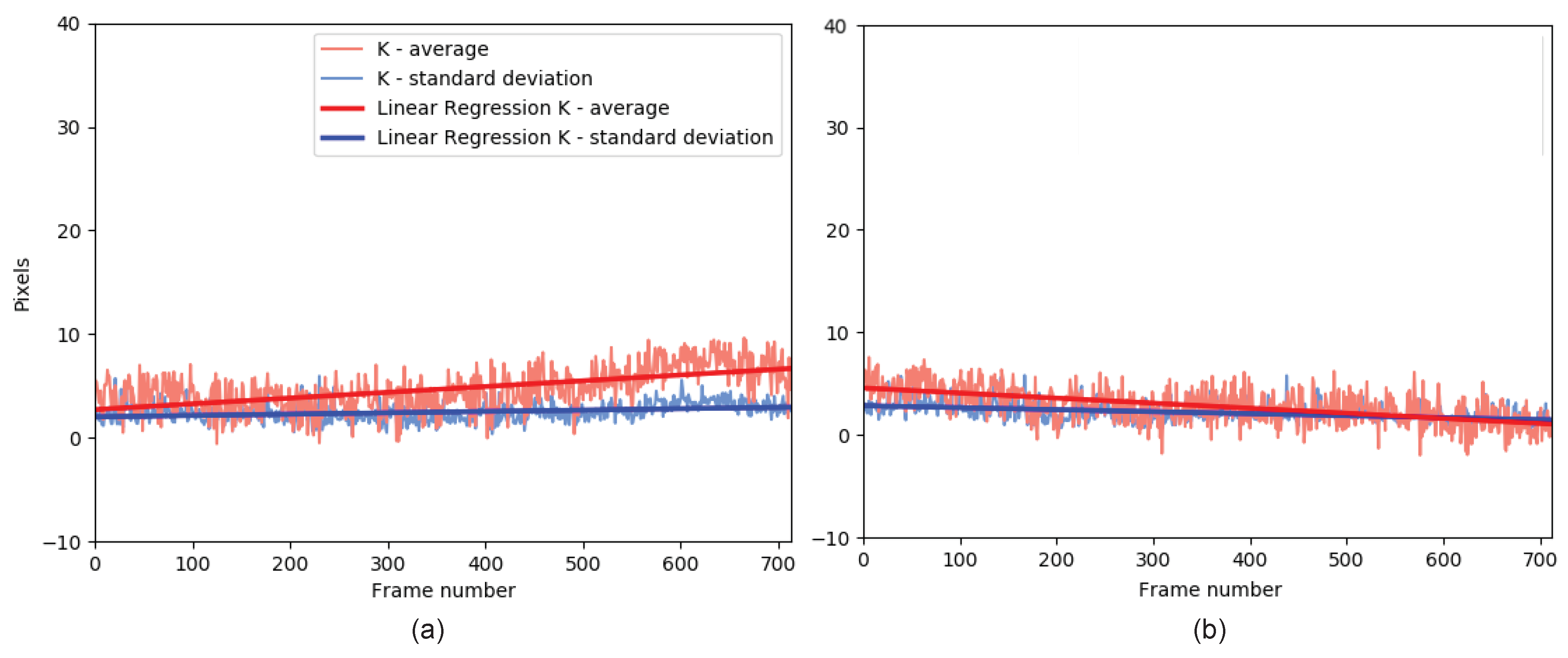
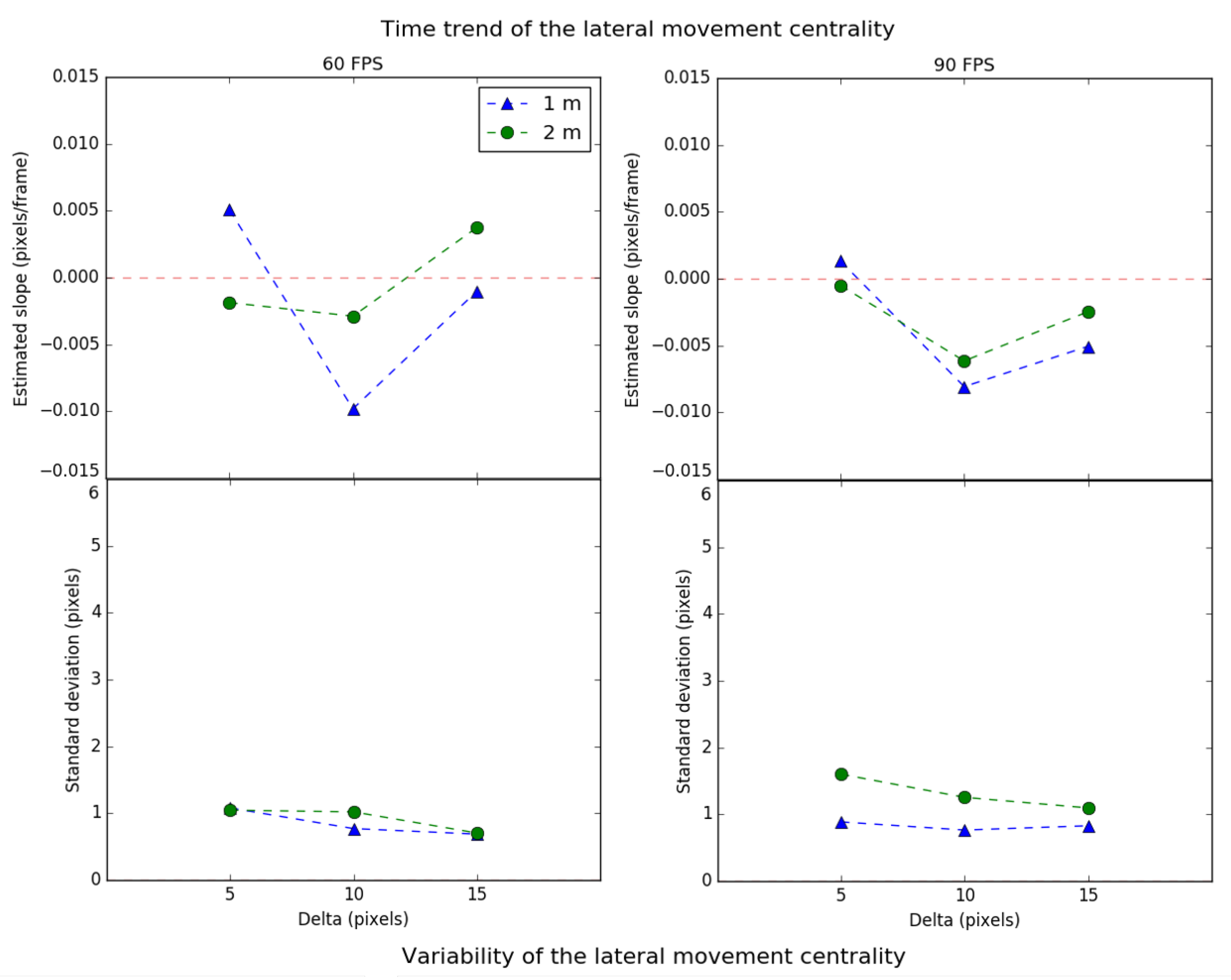
4.2.1. Lateral Movement
4.2.2. Diagonal Movement
4.2.3. Frontal Movement
4.2.4. Student’s t-Test
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Conflicts of Interest
References
- Almohaimeed, A.; Gampa, S.; Singh, G. Privacy-Preserving IoT Devices. In Proceedings of the 2019 IEEE Long Island Systems, Applications and Technology Conference (LISAT), Farmingdale, NY, USA, 3 May 2019; pp. 1–5. [Google Scholar] [CrossRef]
- Alsulami, O.; Hussein, A.T.; Alresheedi, M.T.; Elmirghani, J.M.H. Optical Wireless Communication Systems, A Survey. arXiv 2018, arXiv:1812.11544. [Google Scholar]
- Chowdhury, M.Z.; Shahjalal, M.; Hasan, M.K.; Jang, Y.M. The Role of Optical Wireless Communication Technologies in 5G/6G and IoT Solutions: Prospects, Directions, and Challenges. Appl. Sci. 2019, 9, 4367. [Google Scholar] [CrossRef]
- Ghassemlooy, Z.; Alves, L.; Zvanovec, S.; Khalighi, M. Visible Light Communications: Theory and Applications; CRC-Taylor & Francis Group: Boca Raton, FL, USA, 2017. [Google Scholar]
- Ghassemlooy, Z.; Luo, P.; Zvanovec, S. Optical Camera Communications. Opt. Wirel. Commun. 2016. [Google Scholar] [CrossRef]
- Le, N.T.; Hossain, M.A.; Jang, Y.M. A survey of design and implementation for optical camera communication. Signal Process. Image Commun. 2017. [Google Scholar] [CrossRef]
- Shahjalal, M.; Hasan, M.K.; Chowdhury, M.Z.; Jang, Y.M. Future Optical Camera Communication Based Applications and Opportunities for 5G and beyond. In Proceedings of the 1st International Conference on Artificial Intelligence in Information and Communication, ICAIIC 2019, Okinawa, Japan, 11–13 February 2019. [Google Scholar] [CrossRef]
- Saeed, N.; Guo, S.; Park, K.H.; Al-Naffouri, T.Y.; Alouini, M.S. Optical camera communications: Survey, use cases, challenges, and future trends. Phys. Commun. 2019, 37, 100900. [Google Scholar] [CrossRef]
- IEEE 802.15 Working Group for Wireless Specialty Networks (WSN). IEEE 802.15 WPANTM 15.7 Revision: Short-Range Optical Wireless Communications Task Group (TG 7r1). Available online: http://www.ieee802.org/15/pub/IEEE%20802_15%20WPAN%2015_7%20Revision1%20Task%20GroupOLD.htm (accessed on 14 April 2021).
- Cahyadi, W.A.; Chung, Y.H.; Ghassemlooy, Z.; Hassan, N.B. Optical Camera Communications: Principles, Modulations, Potential and Challenges. Electronics 2020, 9, 1339. [Google Scholar] [CrossRef]
- Chavez-Burbano, P.; Guerra, V.; Rabadan, J.; Jurado-Verdu, C.; Perez-Jimenez, R. Novel Indoor Localization System Using Optical Camera Communication. In Proceedings of the 2018 11th International Symposium on Communication Systems, Networks Digital Signal Processing (CSNDSP), Budapest, Hungary, 18–20 July 2018; pp. 1–5. [Google Scholar] [CrossRef]
- Teli, S.; Cahyadi, W.A.; Chung, Y.H. High-Speed Optical Camera V2V Communications Using Selective Capture. Photonic Netw. Commun. 2018, 36, 210–216. [Google Scholar] [CrossRef]
- Akram, M.; Godaliyadda, R.; Ekanayake, P. Design and analysis of an optical camera communication system for underwater applications. IET Opt. 2020, 14, 10–21. [Google Scholar] [CrossRef]
- Luo, P.; Zhang, M.; Ghassemlooy, Z.; Zvanovec, S.; Feng, S.; Zhang, P. Undersampled-Based Modulation Schemes for Optical Camera Communications. IEEE Commun. Mag. 2018, 56, 204–212. [Google Scholar] [CrossRef]
- Roberts, R.D. Undersampled frequency shift ON-OFF keying (UFSOOK) for camera communications (CamCom). In Proceedings of the 2013 22nd Wireless and Optical Communication Conference, Chongqing, China, 16–18 May 2013; pp. 645–648. [Google Scholar] [CrossRef]
- Liu, N.; Cheng, J.; Holzman, J.F. Undersampled differential phase shift on-off keying for optical camera communications with phase error detection. In Proceedings of the 2017 13th International Wireless Communications and Mobile Computing Conference (IWCMC), Valencia, Spain, 26–30 June 2017; pp. 916–921. [Google Scholar] [CrossRef]
- Luo, P.; Ghassemlooy, Z.; Zvanovec, S.; Feng, S.; Zhang, P.; Zhang, M. Experimental demonstration of undersampled color-shift keying optical camera communications. In Proceedings of the 2017 IEEE/CIC International Conference on Communications in China (ICCC Workshops), Qingdao, China, 22–24 October 2017; pp. 1–6. [Google Scholar] [CrossRef]
- Aoyama, H.; Oshima, M. Line scan sampling for visible light communication: Theory and practice. In Proceedings of the 2015 IEEE International Conference on Communications (ICC), London, UK, 8–12 June 2015; pp. 5060–5065. [Google Scholar] [CrossRef]
- Jerkovits, T.; Liva, G.; Graell i Amat, A. Improving the Decoding Threshold of Tailbiting Spatially Coupled LDPC Codes by Energy Shaping. IEEE Commun. Lett. 2018, 22, 660–663. [Google Scholar] [CrossRef]
- Fang, Y.; Chen, P.; Cai, G.; Lau, F.C.M.; Liew, S.C.; Han, G. Outage-Limit-Approaching Channel Coding for Future Wireless Communications: Root-Protograph Low-Density Parity-Check Codes. IEEE Veh. Technol. Mag. 2019, 14, 85–93. [Google Scholar] [CrossRef]
- Shao, S.; Hailes, P.; Wang, T.Y.; Wu, J.Y.; Maunder, R.G.; Al-Hashimi, B.M.; Hanzo, L. Survey of Turbo, LDPC, and Polar Decoder ASIC Implementations. IEEE Commun. Surv. Tutor. 2019, 21, 2309–2333. [Google Scholar] [CrossRef]
- Uchoa, A.G.D.; Healy, C.T.; de Lamare, R.C. Iterative Detection and Decoding Algorithms for MIMO Systems in Block-Fading Channels Using LDPC Codes. IEEE Trans. Veh. Technol. 2016, 65, 2735–2741. [Google Scholar] [CrossRef]
- Teli, S.R.; Matus, V.; Zvanovec, S.; Perez-Jimenez, R.; Vitek, S.; Ghassemlooy, Z. Optical Camera Communications for IoT–Rolling-Shutter Based MIMO Scheme with Grouped LED Array Transmitter. Sensors 2020, 20, 3361. [Google Scholar] [CrossRef] [PubMed]
- Thieu, M.D.; Pham, T.L.; Nguyen, T.; Jang, Y.M. Optical-RoI-Signaling for Vehicular Communications. IEEE Access 2019, 7, 69873–69891. [Google Scholar] [CrossRef]
- Premachandra, H.C.N.; Yendo, T.; Tehrani, M.P.; Yamazato, T.; Okada, H.; Fujii, T.; Tanimoto, M. High-speed-camera image processing based LED traffic light detection for road-to-vehicle visible light communication. In Proceedings of the 2010 IEEE Intelligent Vehicles Symposium, La Jolla, CA, USA, 21–24 June 2010; IEEE: Piscataway, NJ, USA, 2010; pp. 793–798. [Google Scholar] [CrossRef]
- Islam, A.; Hossan, M.T.; Jang, Y.M. Convolutional neural networkscheme–based optical camera communication system for intelligent Internet of vehicles. Int. J. Distrib. Sens. Netw. 2018, 14, 155014771877015. [Google Scholar] [CrossRef]
- Girshick, R.; Donahue, J.; Darrell, T.; Berkeley, U.C.; Malik, J. R-CNN. Rich Feature Hierarchies for Accurate Object Detection and Semantic Segmentation. In Proceedings of the 2014 IEEE Conference on Computer Vision and Pattern Recognition, Columbus, OH, USA, 23–28 June 2014. [Google Scholar] [CrossRef]
- Girshick, R. Fast R-CNN. In Proceedings of the IEEE International Conference on Computer Vision, Santiago, Chile, 7–13 December 2015. [Google Scholar] [CrossRef]
- Ren, S.; He, K.; Girshick, R.; Sun, J. Faster R-CNN: Towards Real-Time Object Detection with Region Proposal Networks. IEEE Trans. Pattern Anal. Mach. Intell. 2017. [Google Scholar] [CrossRef] [PubMed]
- Redmon, J.; Divvala, S.; Girshick, R.; Farhadi, A. You only look once: Unified, real-time object detection. In Proceedings of the IEEE Computer Society Conference on Computer Vision and Pattern Recognition, Las Vegas, NV, USA, 27–30 June 2016. [Google Scholar] [CrossRef]
- Uijlings, J.R.; Van De Sande, K.E.; Gevers, T.; Smeulders, A.W. Selective search for object recognition. Int. J. Comput. Vis. 2013. [Google Scholar] [CrossRef]
- Zitnick, C.L.; Dollár, P. Edge boxes: Locating object proposals from edges. In Lecture Notes in Computer Science (Including Subseries Lecture Notes in Artificial Intelligence and Lecture Notes in Bioinformatics); Springer: Berlin/Heidelberg, Germany, 2014. [Google Scholar] [CrossRef]
- Grabner, H.; Grabner, M.; Bischof, H. Real-time tracking via on-line boosting. In BMVC 2006, Proceedings of the British Machine Vision Conference, Edinburgh, UK, 4–7 September 2006; BMVA Press: Edinburgh, UK, 2006. [Google Scholar] [CrossRef]
- Babenko, B.; Yang, M.H.; Belongie, S. Robust object tracking with online multiple instance learning. IEEE Trans. Pattern Anal. Mach. Intell. 2011. [Google Scholar] [CrossRef] [PubMed]
- Tang, M.; Yu, B.; Zhang, F.; Wang, J. High-Speed Tracking with Multi-kernel Correlation Filters. In Proceedings of the IEEE Computer Society Conference on Computer Vision and Pattern Recognition, Salt Lake City, UT, USA, 18–23 June 2018. [Google Scholar] [CrossRef]
- Kalal, Z.; Mikolajczyk, K.; Matas, J. Tracking-learning-detection. IEEE Trans. Pattern Anal. Mach. Intell. 2012. [Google Scholar] [CrossRef] [PubMed]
- Kalal, Z.; Mikolajczyk, K.; Matas, J. Forward-backward error: Automatic detection of tracking failures. In Proceedings of the International Conference on Pattern Recognition, Istanbul, Turkey, 23–26 August 2010. [Google Scholar] [CrossRef]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Algorithm | Description |
|---|---|
| BOOSTING [33] | Based on the AdaBoost supervised classifier. |
| MIL [34] | Like the BOOSTING algorithm, instead of classifying GSRs, it classifies with a neighborhood adjacent to the object. |
| KFC [35] | From the neighborhoods described in the MIL, the overlapping areas are studied. |
| TLD [36] | Divided into three stages: tracking, in charge of tracking; detection, the object is studied, and the tracking is corrected; and learning, estimating the errors of the detector and updating it. |
| Median Flow [37] | Studies the temporal coherence of the trajectory; that is, it studies how a point’s trajectory advances forward and backward in time. For this reason, the median flow algorithm first tracks a point forward in time. Then, with the final position of the point, the trajectory backward in time is obtained. Finally, the difference between paths is obtained, and if they differ significantly, the forward path is discarded because it is considered wrong. Otherwise, the ROI is returned where the tracked object is likely to be. |
| Parameter | Values |
|---|---|
| Receiver | |
| Camera model | PiCamera v.2 |
| Image sensor | Sony IMX219 |
| Image resolution [px] | 640 × 480 |
| Aperture lens | f/2 |
| Sampling time, [µs] | 18.904 |
| Horizontal field of view, [ ] | 62.2 |
| Vertical field of view, [ ] | 48.8 |
| Recording time [s] | 10.0 |
| Exposure time, [µs] | 85.0 |
| Transmitter | |
| Matrix LED size [LEDs] | 5 × 5 |
| Distances between LEDs [cm] | |
| LED model | Addressable RGB APA102C |
| Configuration | |
| Types of movements | Lateral, diagonal, frontal |
| Distance [m] | 1.3, 2 |
| Lineal speed [] | 0.5, 1.1 |
| Frames per second [FPS] | 60, 90 |
| Transmitter data hold time | |
| Algorithm | Average FPS | Scalability |
|---|---|---|
| Boosting | 30 | No |
| MIL | 17 | No |
| KCF | 83 | No |
| TLD | 28 | Yes |
| Median Flow | 221 | Yes |
| Mosse | 761 | No |
| CSRT | 28 | Yes |
| Delta | ||||
|---|---|---|---|---|
| Distance | FPS | 5 | 10 | 15 |
| 2 m | 60 | R | R | R |
| 90 | R | R | R | |
| 1.3 m | 60 | R | R | NR |
| 90 | R | R | R | |
| Delta | ||||
|---|---|---|---|---|
| Distance | FPS | 5 | 10 | 15 |
| 2 m | 60 | R | NR | R |
| 90 | R | R | R | |
| 1.3 m | 60 | R | R | R |
| 90 | R | R | R | |
| Delta | |||
|---|---|---|---|
| 5 | 10 | 15 | |
| / and | R | NR | R |
| / and | R | R | R |
| / and 2 | R | R | R |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Mederos-Barrera, A.; Jurado-Verdu, C.; Guerra, V.; Rabadan, J.; Perez-Jimenez, R. Design and Experimental Characterization of a Discovery and Tracking System for Optical Camera Communications. Sensors 2021, 21, 2925. https://doi.org/10.3390/s21092925
Mederos-Barrera A, Jurado-Verdu C, Guerra V, Rabadan J, Perez-Jimenez R. Design and Experimental Characterization of a Discovery and Tracking System for Optical Camera Communications. Sensors. 2021; 21(9):2925. https://doi.org/10.3390/s21092925
Chicago/Turabian StyleMederos-Barrera, Antonio, Cristo Jurado-Verdu, Victor Guerra, Jose Rabadan, and Rafael Perez-Jimenez. 2021. "Design and Experimental Characterization of a Discovery and Tracking System for Optical Camera Communications" Sensors 21, no. 9: 2925. https://doi.org/10.3390/s21092925
APA StyleMederos-Barrera, A., Jurado-Verdu, C., Guerra, V., Rabadan, J., & Perez-Jimenez, R. (2021). Design and Experimental Characterization of a Discovery and Tracking System for Optical Camera Communications. Sensors, 21(9), 2925. https://doi.org/10.3390/s21092925