
Mobile Network Performance and Technical Feasibility of LTE-Powered Unmanned Aerial Vehicle

 ,
,  ,
,  and
and 
Abstract
1. Introduction
- -
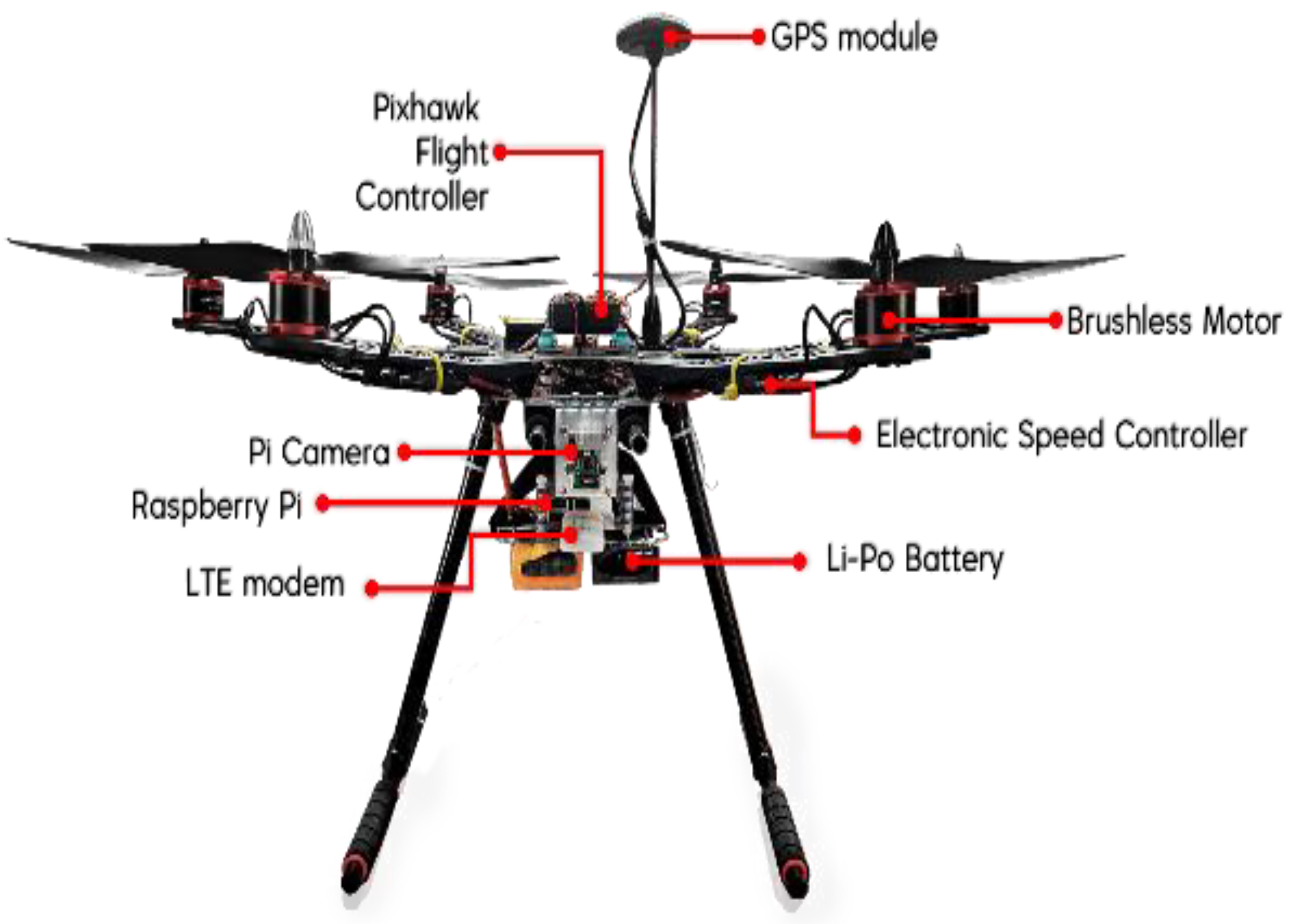
- An LTE-powered drone prototype was constructed based on the latest hardware and software available in the market. The developed drone prototype can handle less delayed video streaming, send a real-time location, and be fully controlled using the LTE mobile network remotely. The prototype design can guide future works in this area.
- -
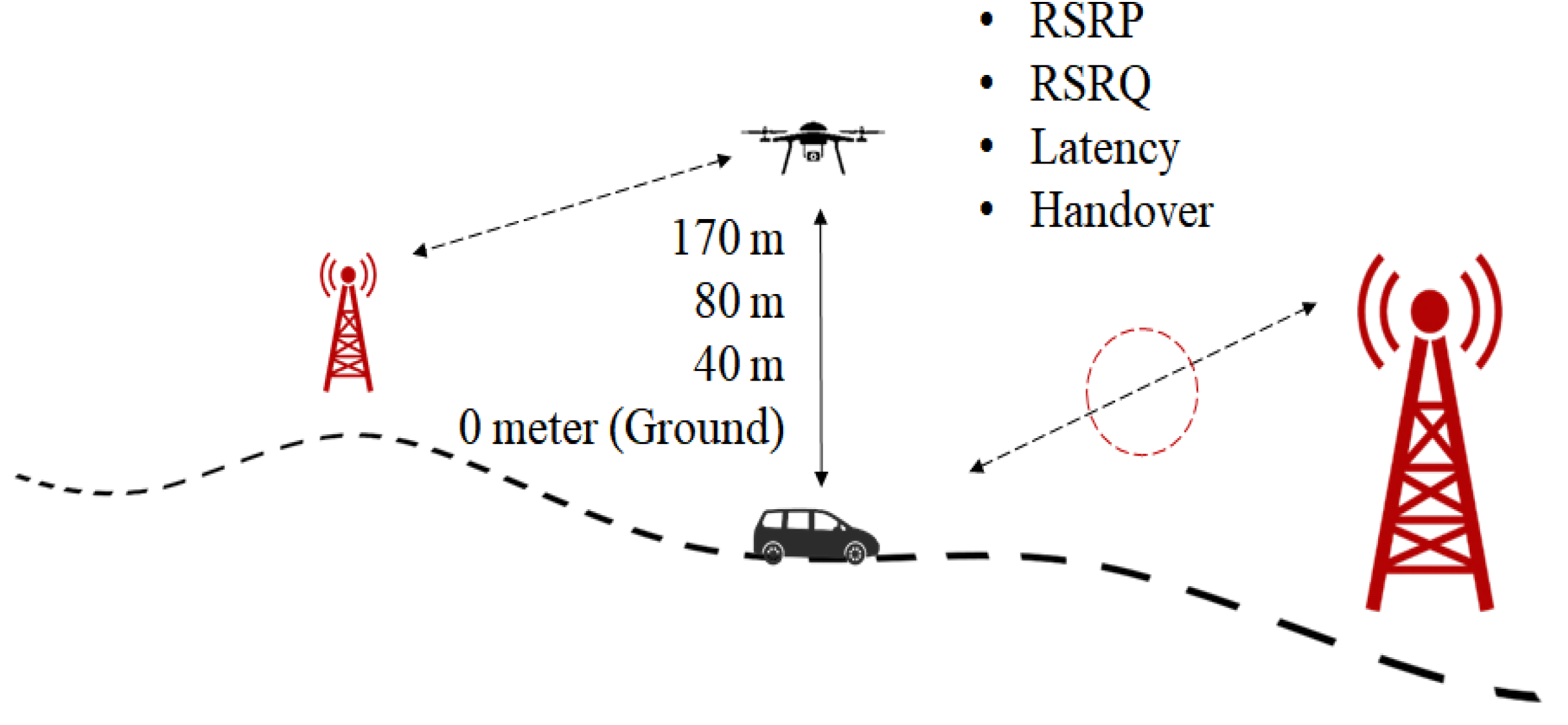
- A field trial measurement was conducted in a commercial LTE network and suburban environment (university campus). For measurements, the state-of-the-art techniques were used and important parameters, such as RSRP, RSRQ, data rate, latency, and handover, were measured to evaluate the system performance.
- -
- Performance of the LTE system was analyzed according to the measured parameters and large-scale pathloss channel model. To investigate the feasibility of LTE connectivity for low altitude small drones, the system performance was compared with the requirements established by 3GPP. In addition, the technical challenges of utilizing the current industrial 4G technology for providing BVLoS operations for drones were revealed. Finally, several future works and potential solutions were presented to overcome the challenges and improve the LTE connectivity performance.
- -
- The drone power consumption was studied and the main power consuming parts were revealed. The results can be used as guidance to improve energy efficiency and drone flight time for future works.
2. Methodology
2.1. Hardware Consideration
2.2. Software Setup
2.3. Experiment Equipment
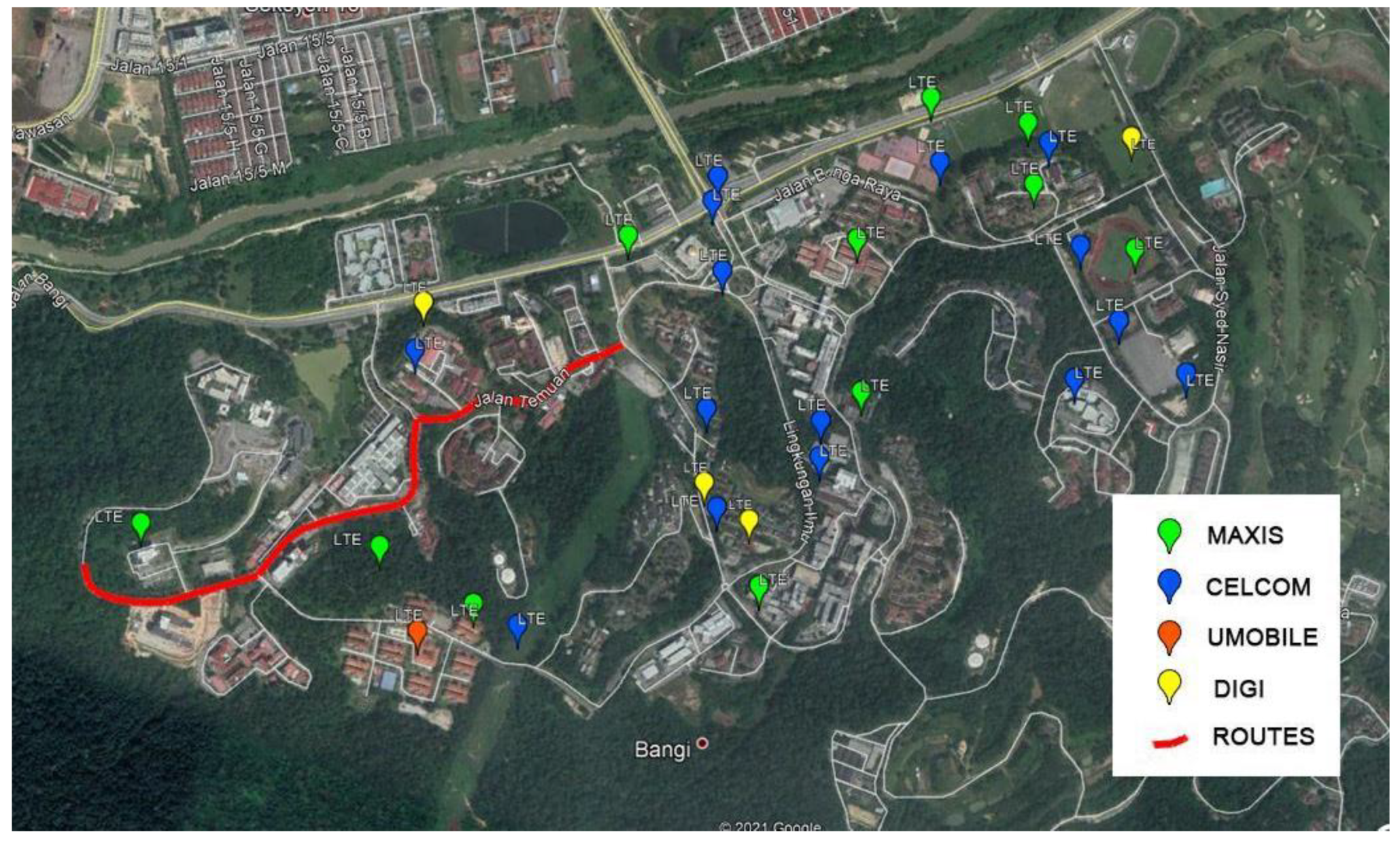
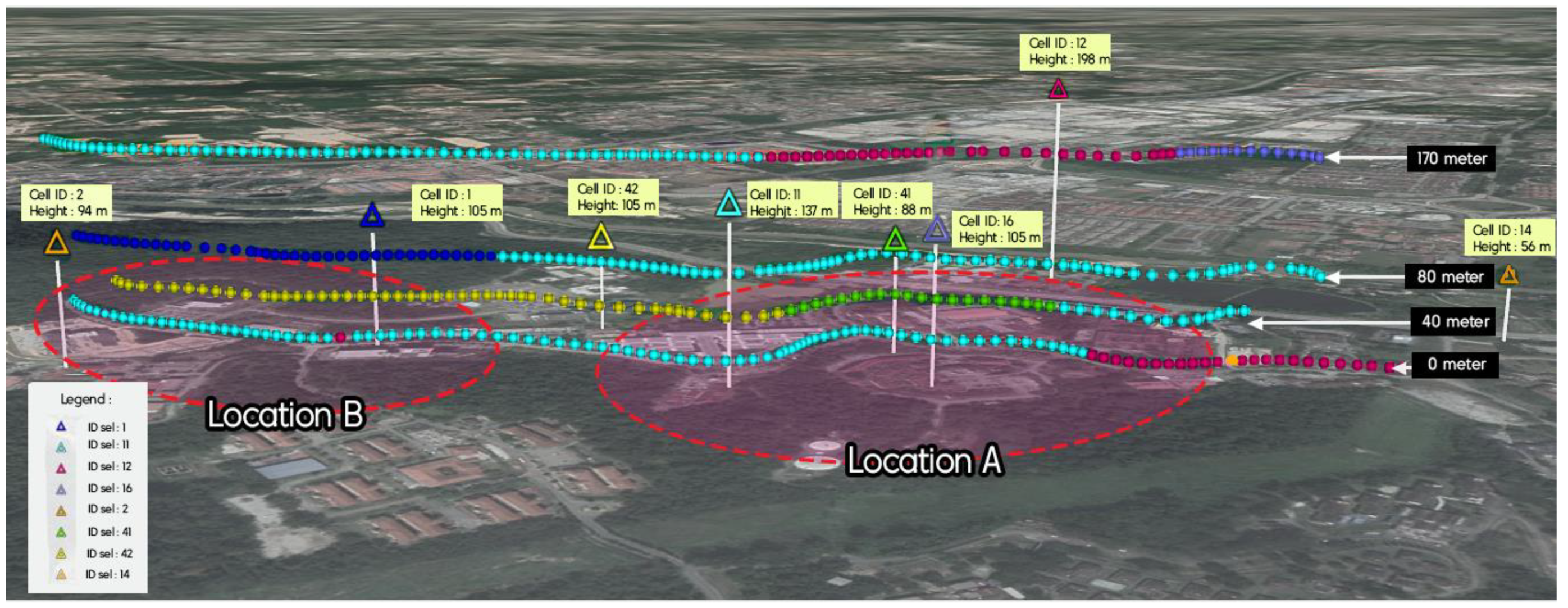
2.4. Measurement Area
2.5. Comparison of Application for Drive Test
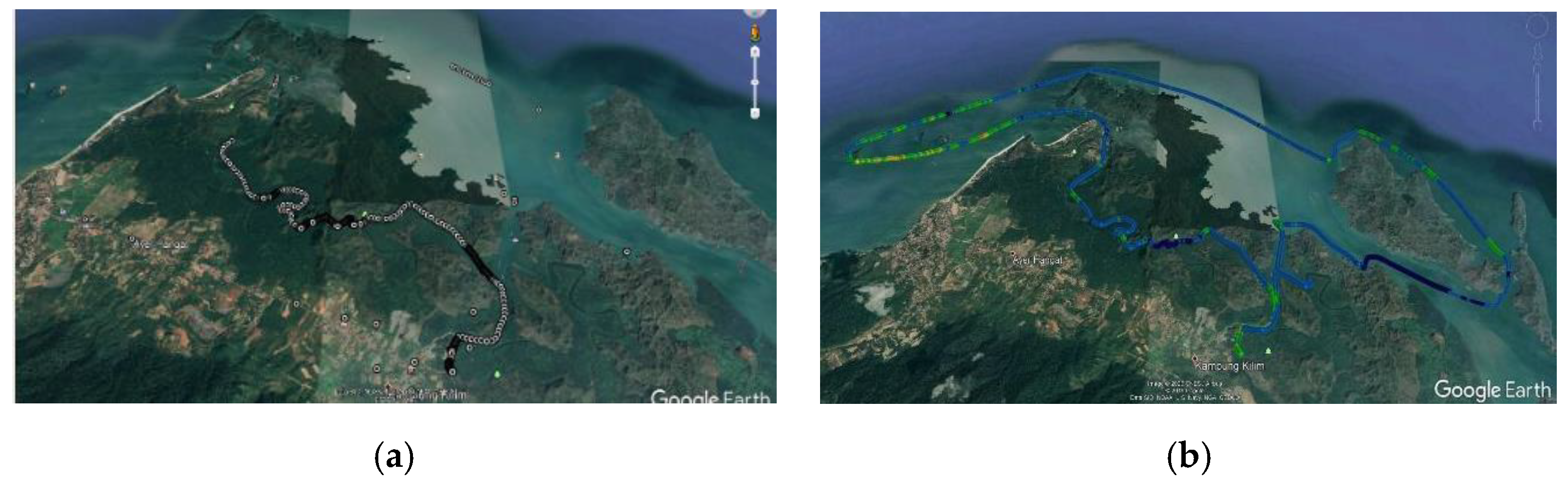
2.6. Field Trial Measurement
2.7. Feasibility Test
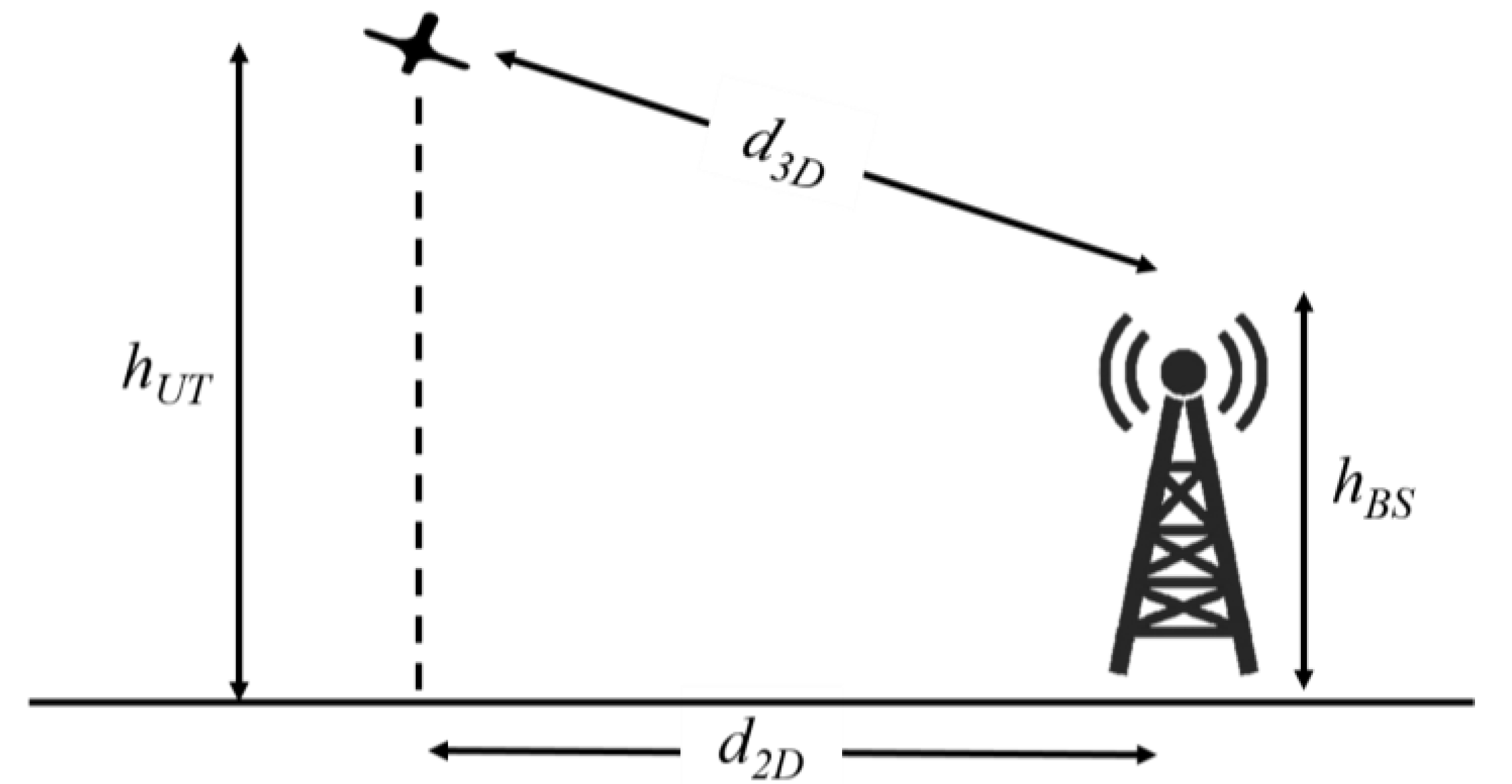
3. Aerial Channel Model
4. Results
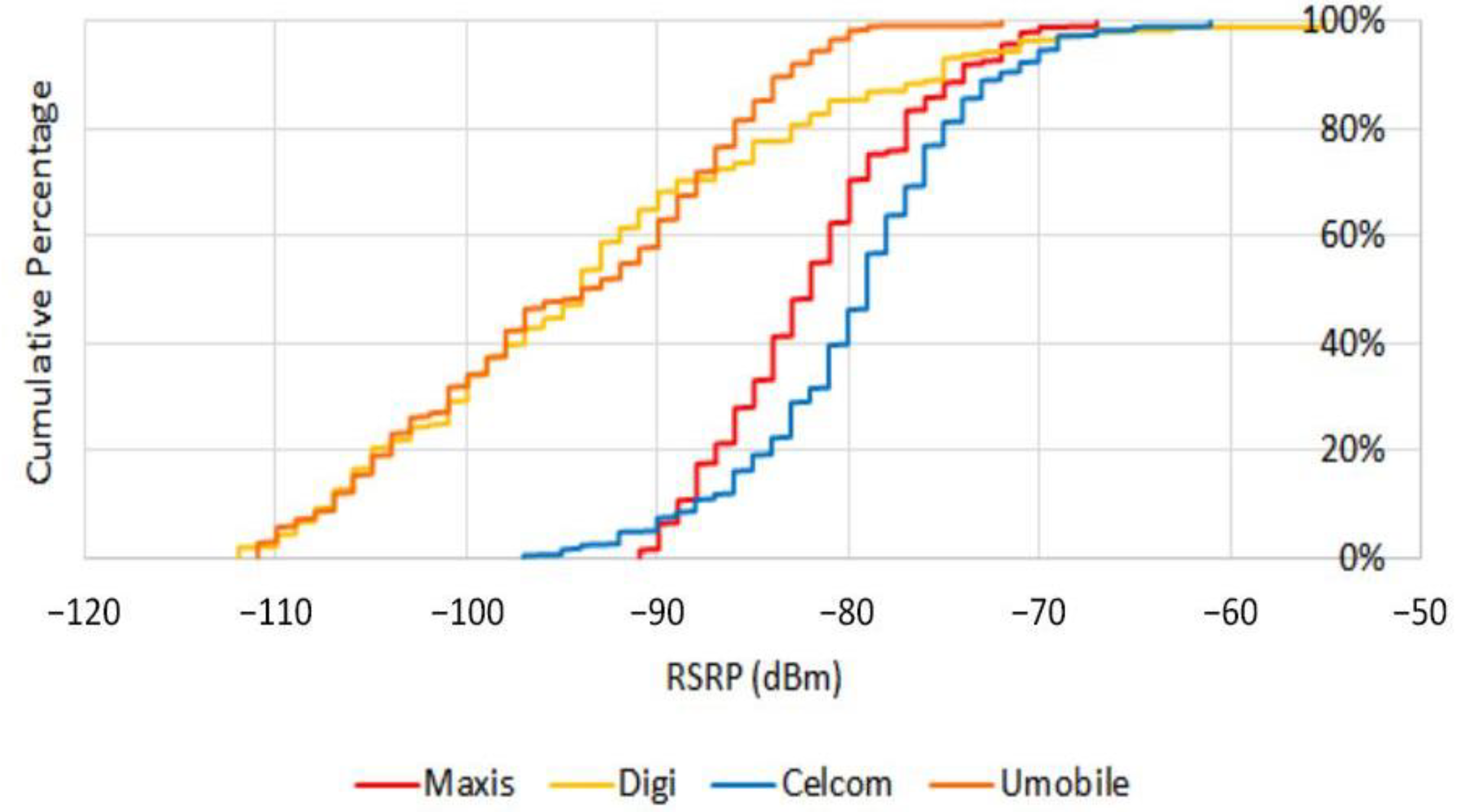
4.1. Ground Level Field Trial
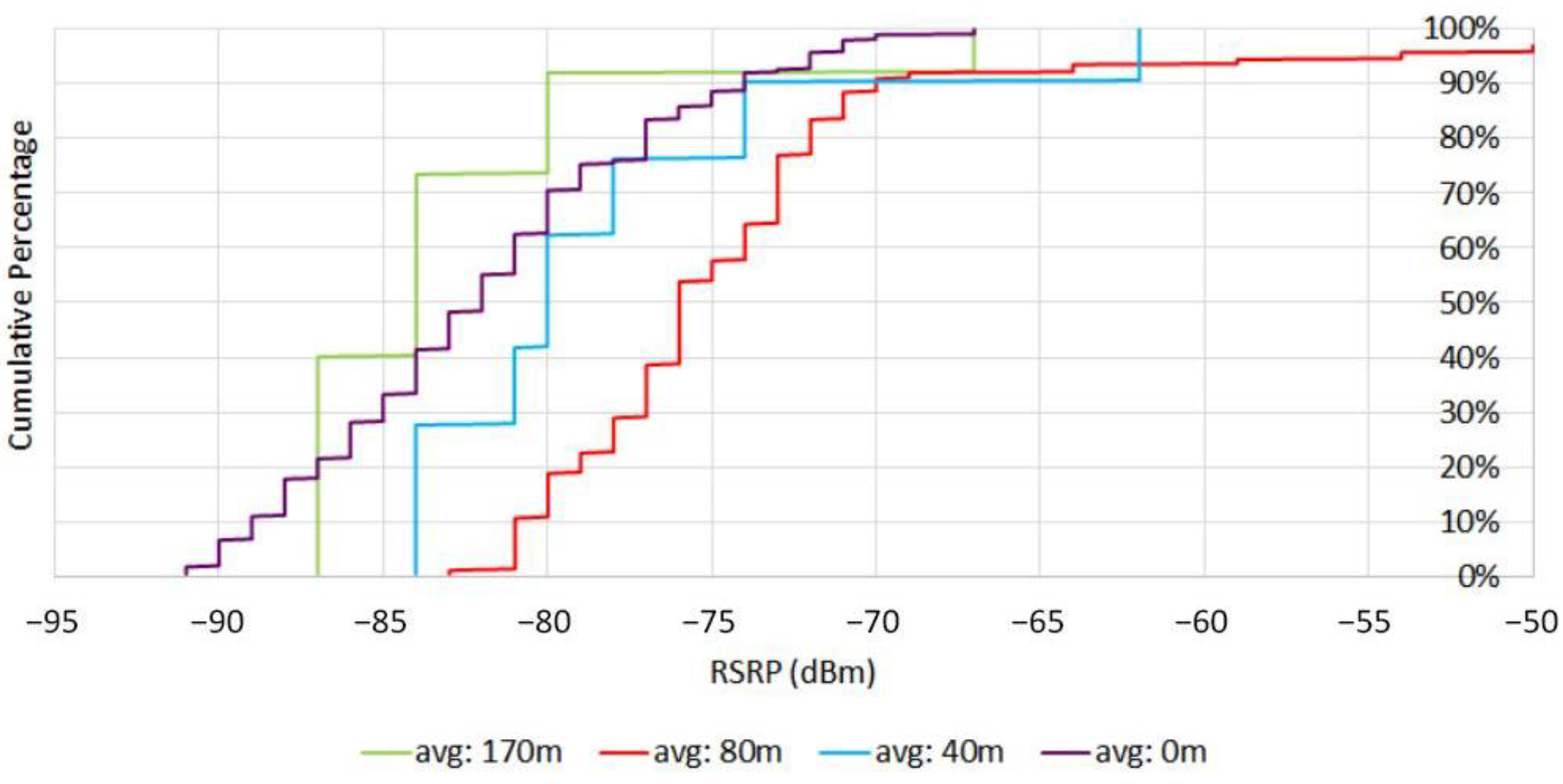
4.2. Higher Elevations Field Trial
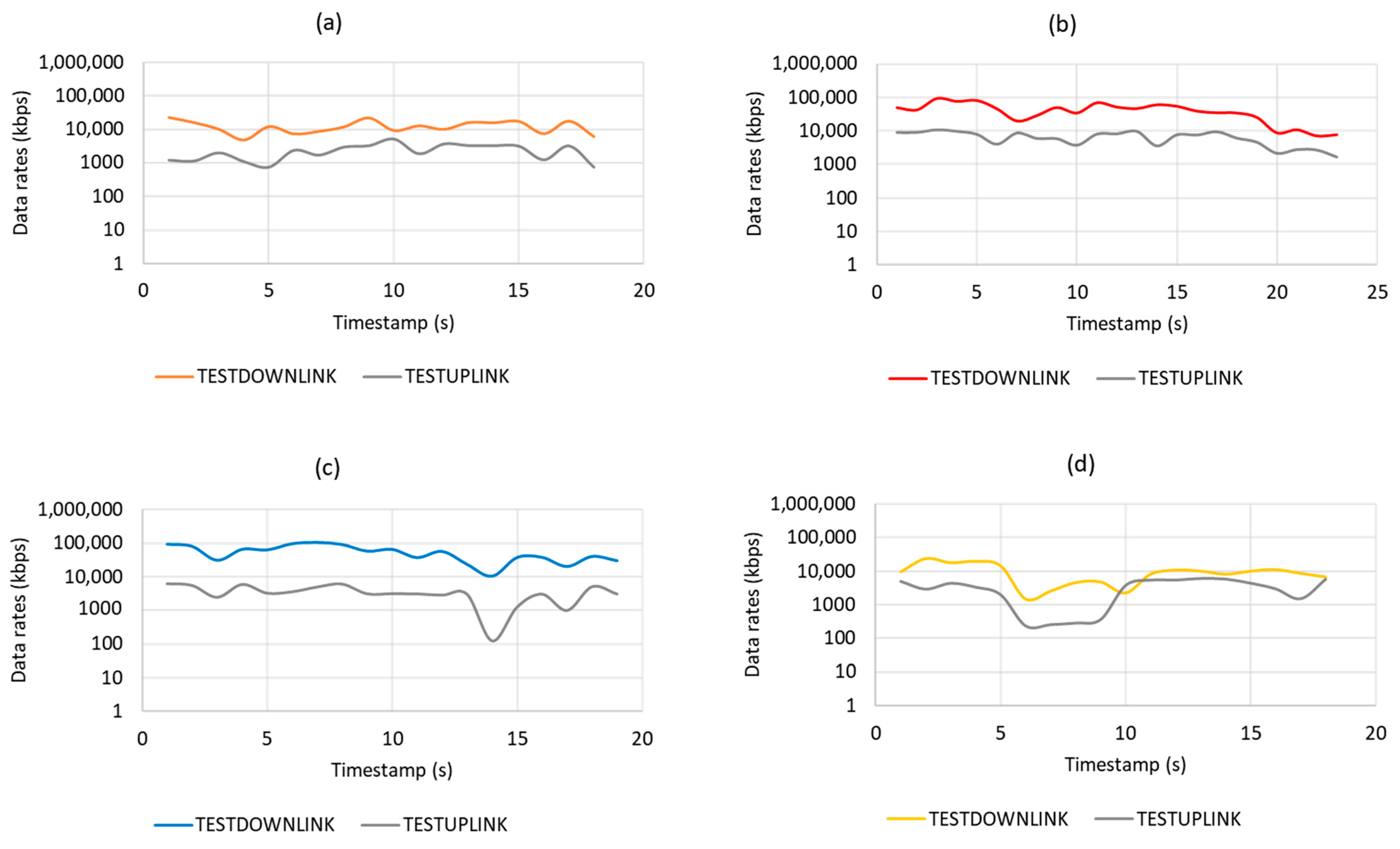
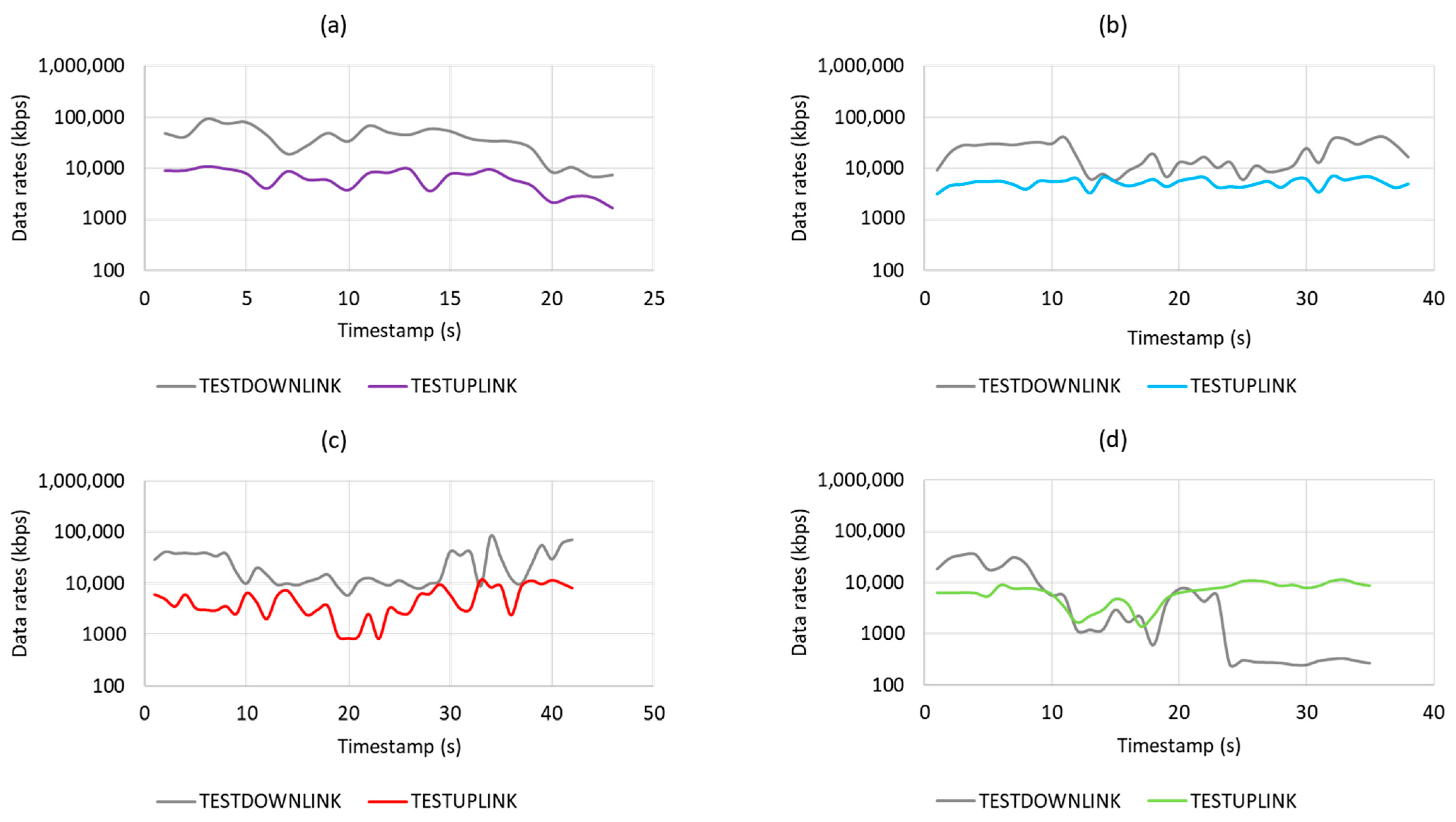
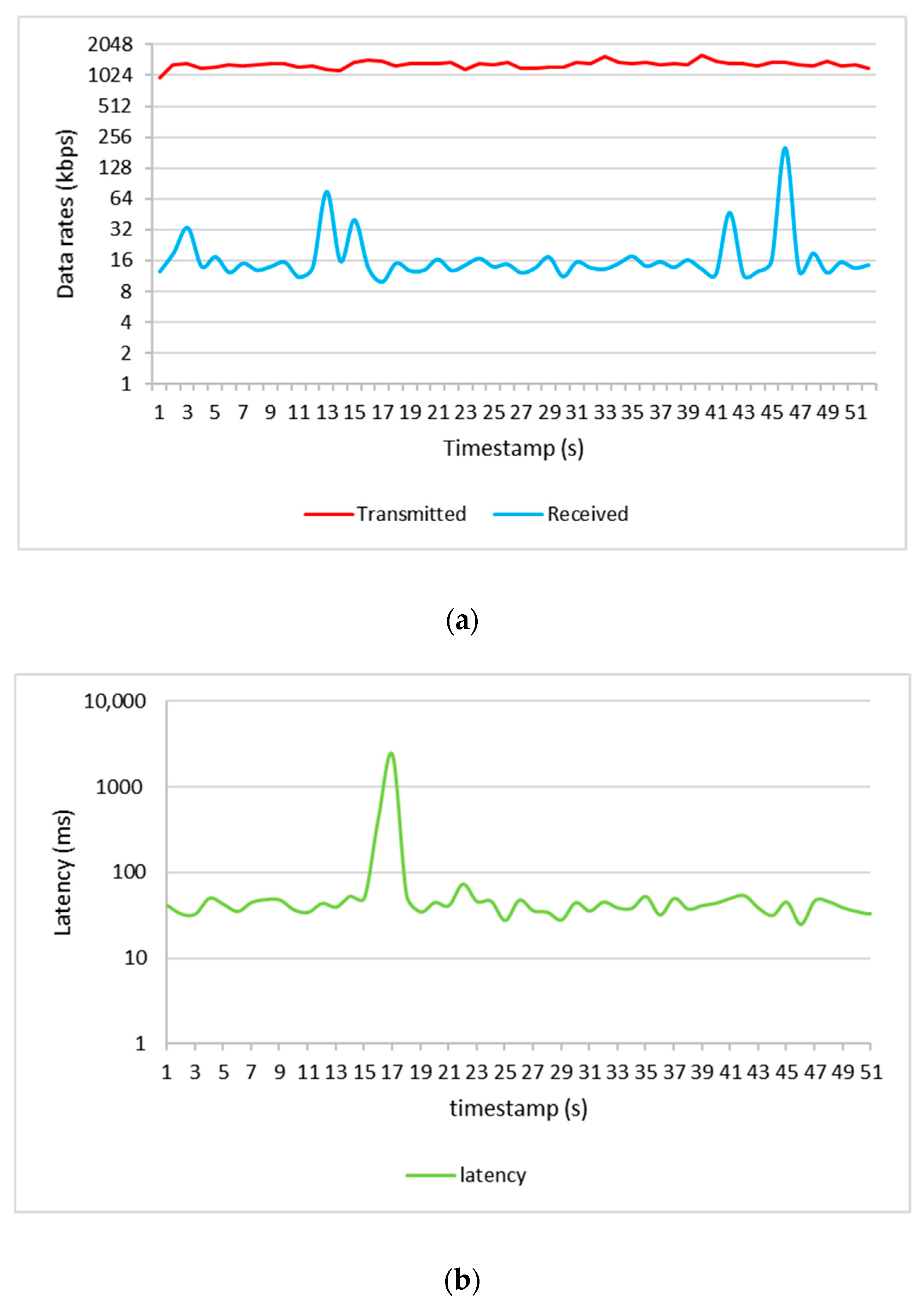
4.3. Uplink and Downlink Throughput Comparison with 3GPP Standard
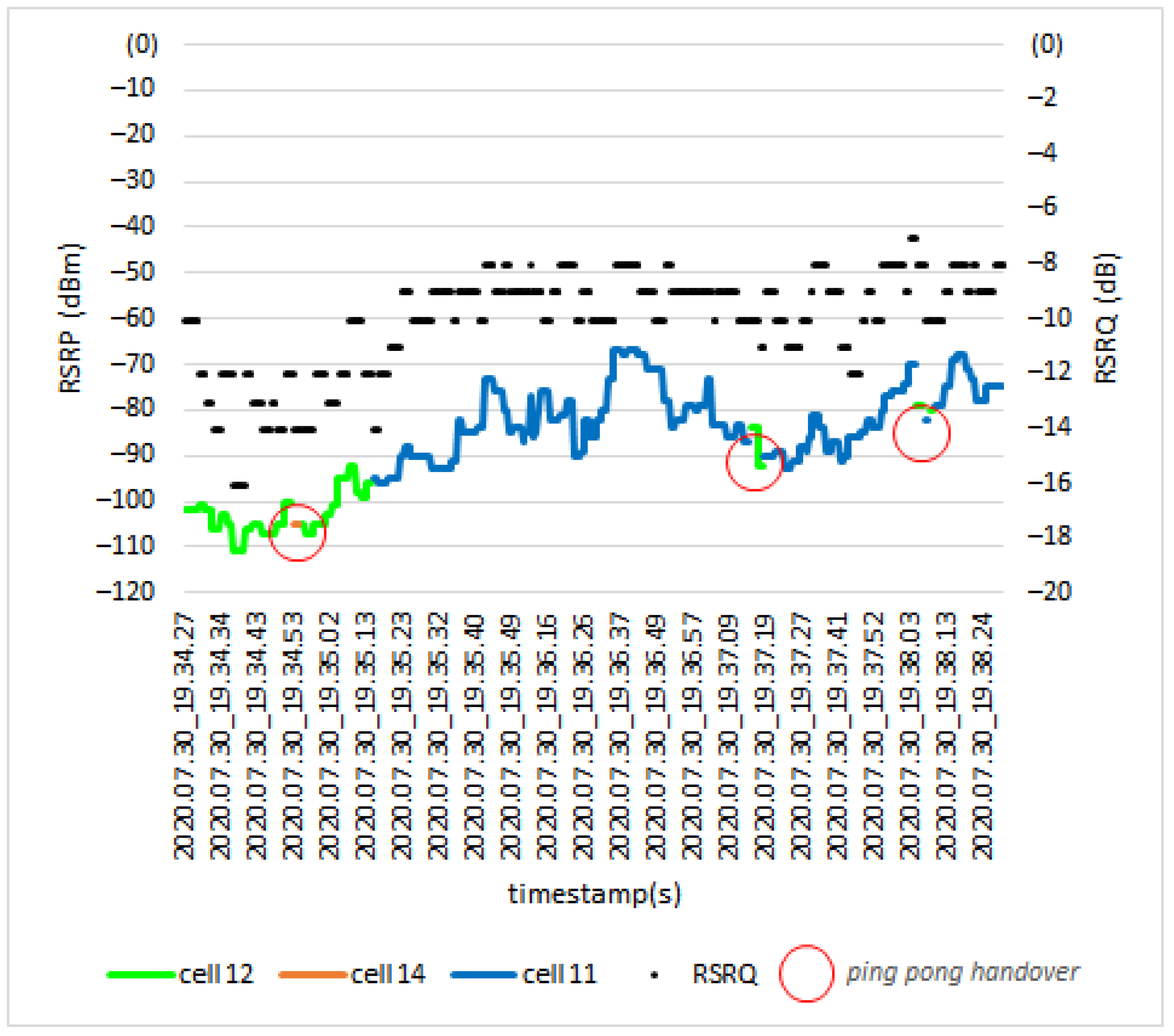
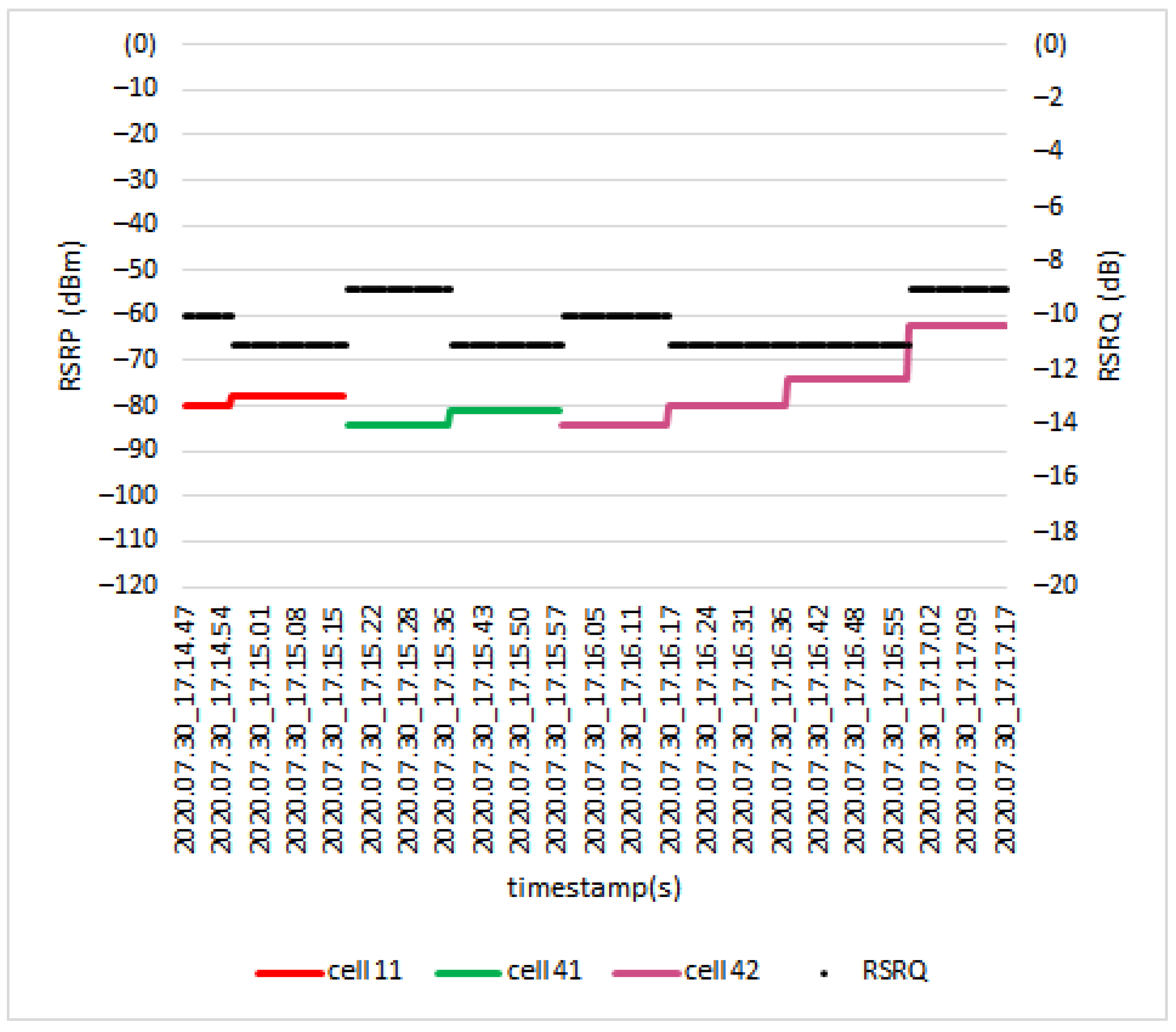
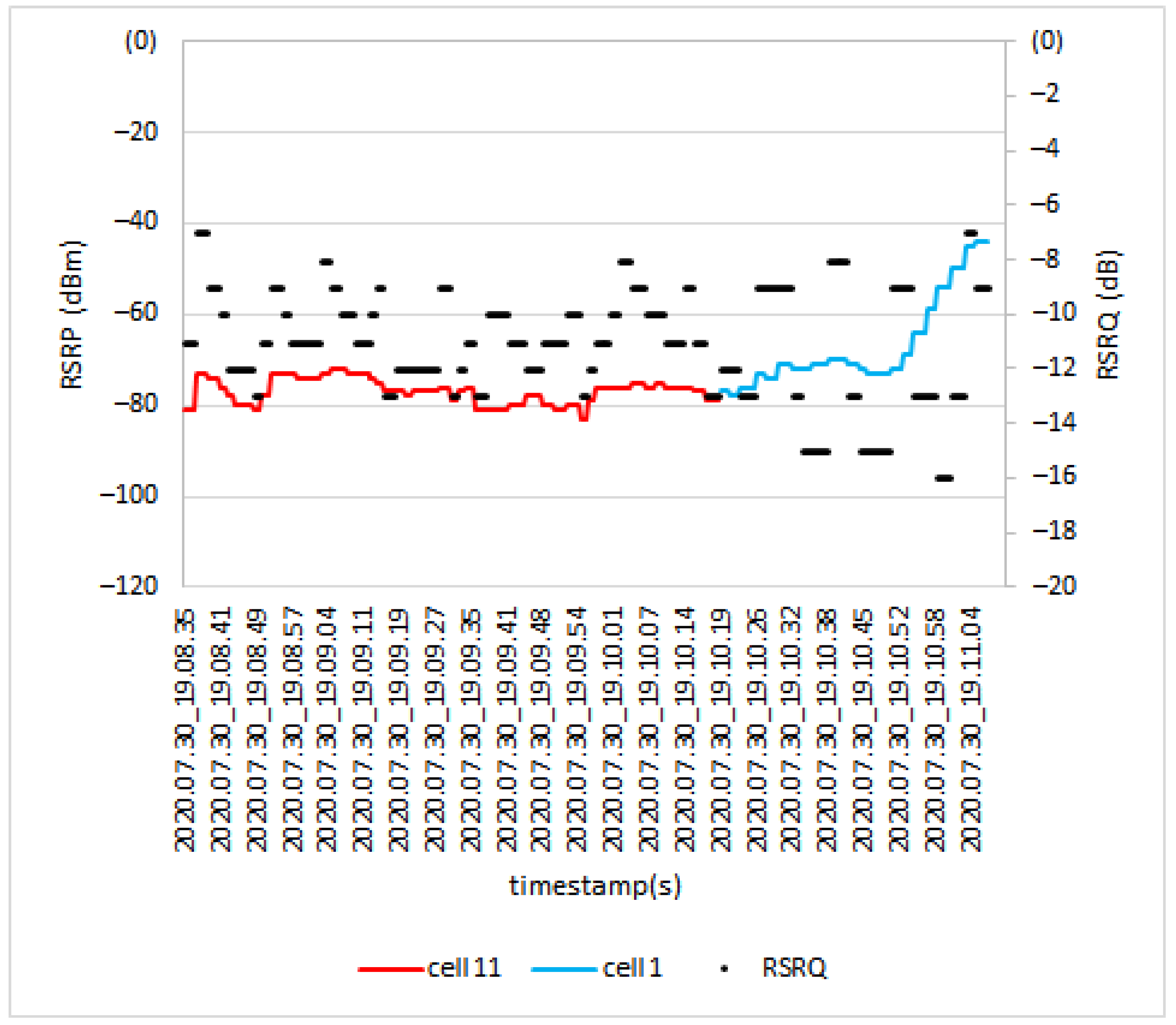
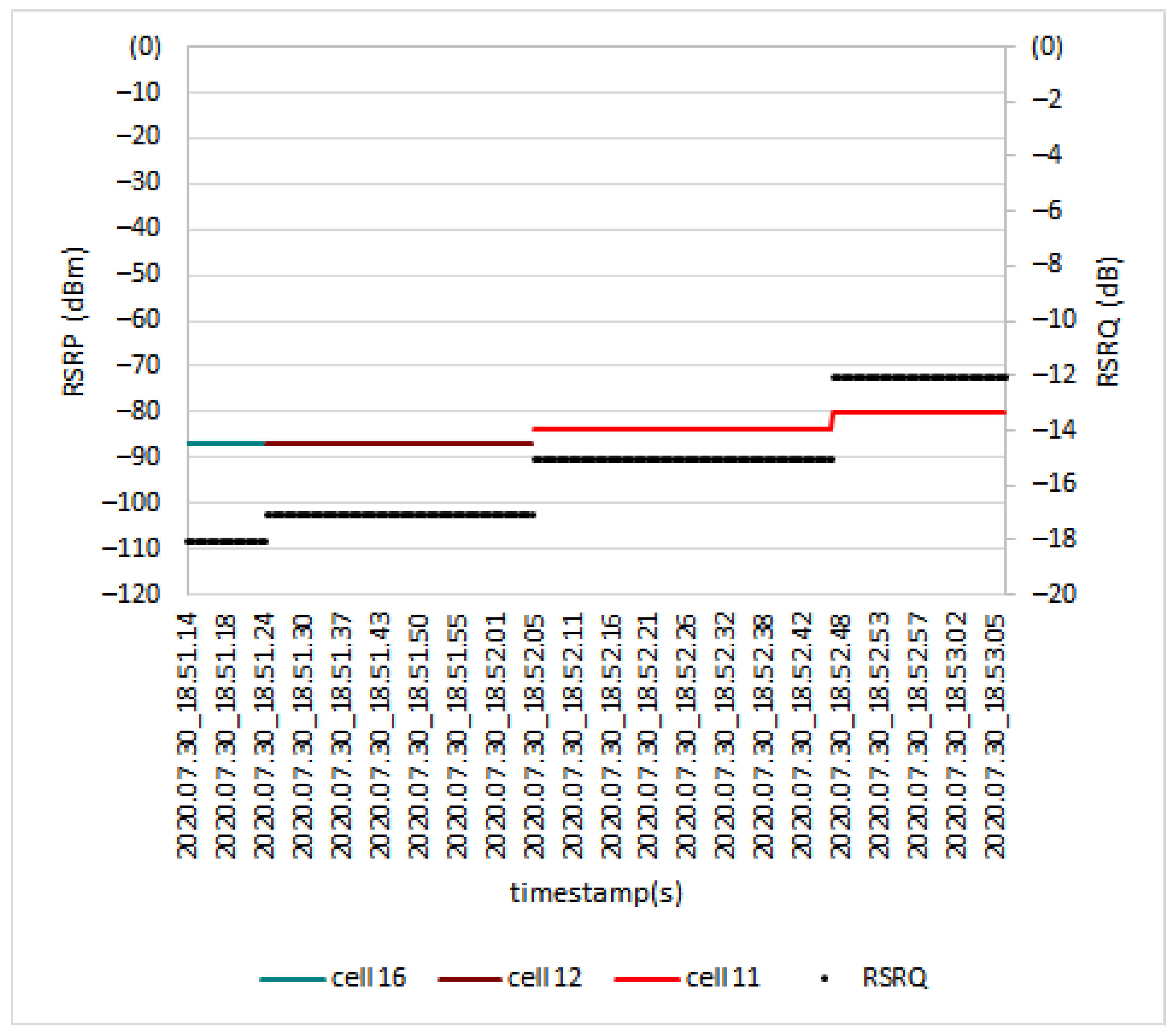
4.4. Effect of Fly Height on Handover
4.5. Effect of Surrounding Environment on Handover
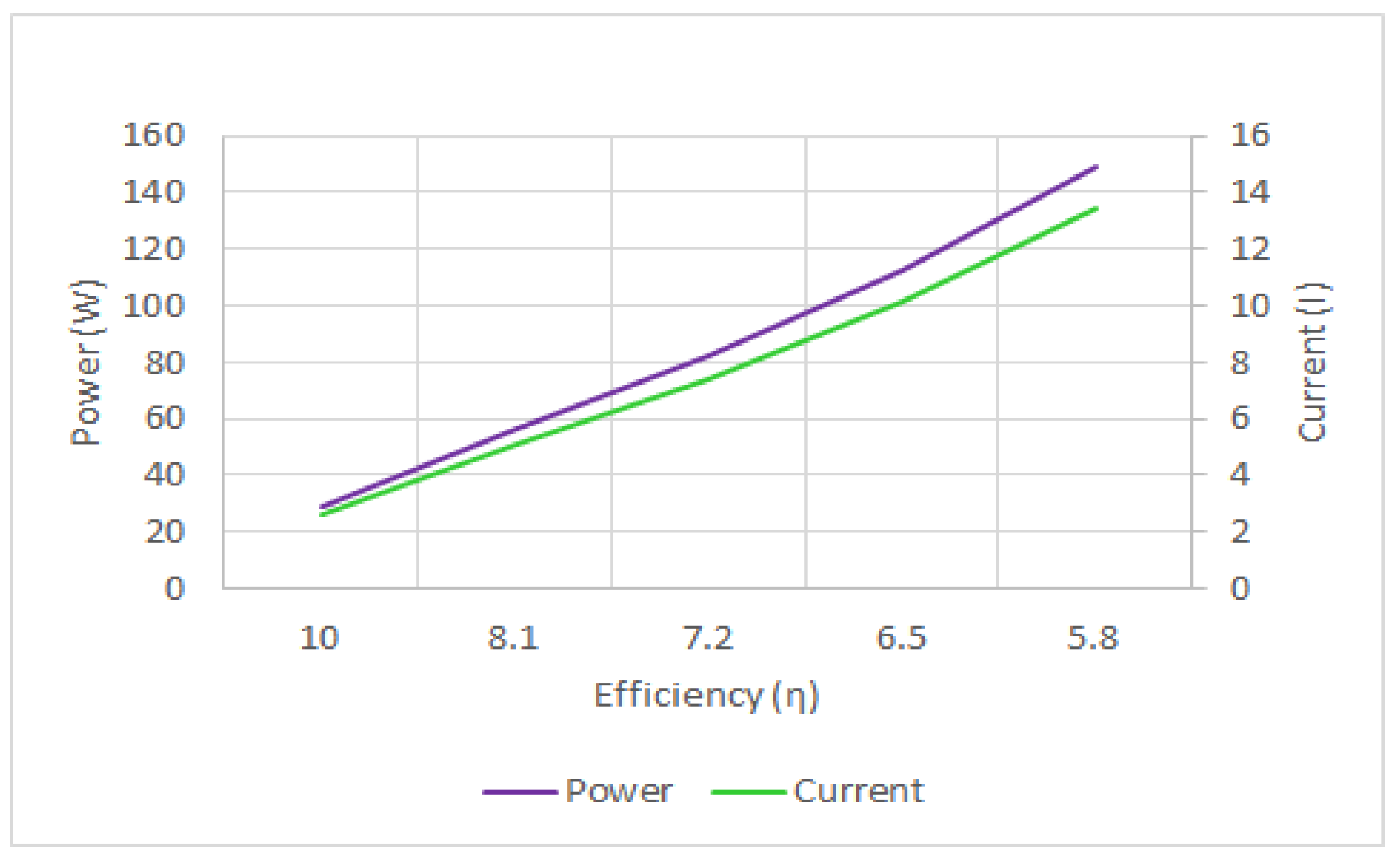
4.6. Drone Performance Evaluation
4.7. Energy Consumption
5. Reflection: Practical Challenges and Solutions
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Zeng, Y.; Guvenc, I.; Zhang, R.; Geraci, G.; Matolak, D.W. UAV Communications for 5G and Beyond; Wiley Online Library: New York, NY, USA, 2020. [Google Scholar]
- Tsouros, D.C.; Bibi, S.; Sarigiannidis, P.G. A review on UAV-based applications for precision agriculture. Information 2019, 10, 349. [Google Scholar] [CrossRef]
- Yao, H.; Qin, R.; Chen, X. Unmanned aerial vehicle for remote sensing applications—A review. Remote Sens. 2019, 11, 1443. [Google Scholar] [CrossRef]
- Shahmoradi, J.; Talebi, E.; Roghanchi, P.; Hassanalian, M. “A Comprehensive Review of Applications of Drone Technology in the Mining Industry. Drones 2020, 4, 34. [Google Scholar] [CrossRef]
- Zailani, M.A.; Sabudin, R.Z.; Rahman, R.A.; Saiboon, I.M.; Ismail, A.; Mahdy, Z.A. Drone for medical products transportation in maternal healthcare: A systematic review and framework for future research. Medicine 2020, 99, 1–6. [Google Scholar] [CrossRef]
- Noori, R.; Dahnil, D.P. The Effects of Speed and Altitude on Wireless Air Pollution Measurements using Hexacopter Drone. Int. J. Adv. Comput. Sci. Appl. 2020, 11, 268–276. [Google Scholar]
- Adão, T.; Hruška, J.; Pádua, L.; Bessa, J.; Peres, E.; Morais, R.; Sousa, J. Hyperspectral imaging: A review on UAV-based sensors, data processing and applications for agriculture and forestry. Remote Sens. 2017, 9, 1110. [Google Scholar] [CrossRef]
- Wang, X.; Kealy, A.; Li, W.; Jelfs, B.; Gilliam, C.; May, S.L.; Moran, B. Toward Autonomous UAV Localization via Aerial Image Registration. Electronics 2021, 10, 435. [Google Scholar] [CrossRef]
- Gupta, L.; Jain, R.; Vaszkun, G. Survey of important issues in UAV communication networks. Ieee Commun. Surv. Tutor. 2015, 18, 1123–1152. [Google Scholar] [CrossRef]
- Zeng, Y.; Wu, Q.; Zhang, R. Accessing from the sky: A tutorial on UAV communications for 5G and beyond. Proc. IEEE 2019, 107, 2327–2375. [Google Scholar] [CrossRef]
- Lin, X.; Yajnanarayana, V.; Muruganathan, S.D.; Gao, S.; Asplund, H.; Maattanen, H.-L.; Bergstrom, M.; Euler, S.; Wang, Y.-P.E. The sky is not the limit: LTE for unmanned aerial vehicles. IEEE Commun. Mag. 2018, 56, 204–210. [Google Scholar] [CrossRef]
- Zeng, Y.; Zhang, R.; Lim, T.J. Wireless communications with unmanned aerial vehicles: Opportunities and challenges. IEEE Commun. Mag. 2016, 54, 36–42. [Google Scholar] [CrossRef]
- Mousavi, H.; Amiri, I.S.; Mostafavi, M.A.; Choon, C.Y. LTE physical layer: Performance analysis and evaluation. Appl. Comput. Inform. 2019, 15, 34–44. [Google Scholar] [CrossRef]
- Zeng, Y.; Lyu, J.; Zhang, R. Cellular-connected UAV: Potential, challenges, and promising technologies. IEEE Wirel. Commun. 2018, 26, 120–127. [Google Scholar] [CrossRef]
- Lin, X.; Wiren, R.; Euler, S.; Sadam, A.; Maattanen, H.-L.; Muruganathan, S.; Gao, S.; Wang, Y.-P.E.; Kauppi, J.; Zou, Z.; et al. Mobile network-connected drones: Field trials, simulations, and design insights. IEEE Veh. Technol. Mag. 2019, 14, 115–125. [Google Scholar] [CrossRef]
- Euler, S.; Maattanen, H.-L.; Lin, X.; Zou, Z.; Bergström, M.; Sedin, J. Mobility support for cellular connected unmanned aerial vehicles: Performance and analysis. In Proceedings of the 2019 IEEE Wireless Communications and Networking Conference (WCNC), Marrakesh, Morocco, 15–18 April 2019; pp. 1–6. [Google Scholar]
- Wang, H.; Wang, J.; Chen, J.; Gong, Y.; Ding, G. Network-connected UAV communications: Potentials and challenges. China Commun. 2018, 15, 111–121. [Google Scholar]
- Ng, K.J.; Islam, M.T.; Alevy, A.; Mansor, M.F.; Su, C.C. Azimuth Null-Reduced Radiation Pattern, Ultralow Profile, Dual-Wideband and Low Passive Intermodulation Ceiling Mount Antenna for Long Term Evolution Application. IEEE Access 2019, 7, 114761–114777. [Google Scholar] [CrossRef]
- Muruganathan, S.D.; Lin, X.; Maattanen, H.-L.; Sedin, J.; Zou, Z.; Hapsari, W.A.; Yasukawa, S. An overview of 3GPP release-15 study on enhanced LTE support for connected drones. arXiv 2018, arXiv:1805.00826. [Google Scholar]
- Wang, C.; Wang, J.; Shen, Y.; Zhang, X. Autonomous navigation of UAVs in large-scale complex environments: A deep reinforcement learning approach. IEEE Trans. Veh. Technol. 2019, 68, 2124–2136. [Google Scholar] [CrossRef]
- Wu, Q.; Zeng, Y.; Zhang, R. Joint trajectory and communication design for multi-UAV enabled wireless networks. IEEE Trans. Wirel. Commun. 2018, 17, 2109–2121. [Google Scholar] [CrossRef]
- Zeng, Y.; Zhang, R. Energy-efficient UAV communication with trajectory optimization. IEEE Trans. Wirel. Commun. 2017, 16, 3747–3760. [Google Scholar] [CrossRef]
- Jawad, A.M.; Jawad, H.M.; Nordin, R.; Gharghan, S.K.; Abdullah, N.F.; Abu-Alshaeer, M.J. Wireless power transfer with magnetic resonator coupling and sleep/active strategy for a drone charging station in smart agriculture. IEEE Access 2019, 7, 139839–139851. [Google Scholar] [CrossRef]
- Ernest, T.Z.H.; Madhukumar, A.; Sirigina, R.P.; Krishna, A.K. A hybrid-duplex system with joint detection for interference-limited UAV communications. IEEE Trans. Veh. Technol. 2018, 68, 335–348. [Google Scholar] [CrossRef]
- Chetlur, V.V.; Dhillon, H.S. Downlink coverage analysis for a finite 3-D wireless network of unmanned aerial vehicles. IEEE Trans. Commun. 2017, 65, 4543–4558. [Google Scholar] [CrossRef]
- Zhang, C.; Zhang, W. Spectrum sharing for drone networks. IEEE J. Sel. Areas Commun. 2016, 35, 136–144. [Google Scholar] [CrossRef]
- Geraci, G.; Garcia-Rodriguez, A.; Giordano, L.G.; López-Pérez, D.; Björnson, E. Understanding UAV cellular communications: From existing networks to massive MIMO. IEEE Access 2018, 6, 67853–67865. [Google Scholar] [CrossRef]
- Sae, J.; Wiren, R.; Kauppi, J.; Maattanen, H.-L.; Torsner, J.; Valkama, M. Public LTE network measurements with drones in rural environment. In Proceedings of the 2019 IEEE 89th Vehicular Technology Conference (VTC2019-Spring), Kuala Lumpur, Malaysia, 28 April–1 May 2019; pp. 1–5. [Google Scholar]
- Yang, G.; Lin, X.; Li, Y.; Cui, H.; Xu, M.; Wu, D.; Rydén, H.; Redhwan, S.B. A telecom perspective on the internet of drones: From LTE-advanced to 5G. arXiv 2018, arXiv:1803.11048. [Google Scholar]
- Raspberry Pi Fondation. Raspberry Pi 3 Model B+. Available online: https://www.raspberrypi.org/products/raspberry-pi-3-model-b-plus/ (accessed on 31 January 2021).
- Station, X.B. XBStation Platform ForInternet Drone Base On Real Time 4G/5G Connectivity. Available online: https://www.xbstation.com/ (accessed on 21 October 2019).
- Sky Drone. SKYDRONEFPV3. Available online: https://www.skydrone.aero/products/sky-drone-fpv-3 (accessed on 21 October 2019).
- Botlink. 4G LTE Cellular BVLOS Drone Control XRD. Available online: https://botlink.com/4g-lte-cellular-bvlos-drone-control-xrd (accessed on 21 October 2019).
- Flytbase. Cloud-based Drone Video Streaming & Fleet Management Solution. Available online: https://store.flytbase.com/product/flytpi/ (accessed on 21 October 2019).
- Uavmatrix. UAVcast-Pro–raspberry pi internet drone lte 4g 5g Wifi Companion Software. Available online: https://uavmatrix.com/product/uavcast-pro/ (accessed on 20 September 2003).
- ArduPilotDevTeam. Available online: https://ardupilot.org/ardupilot/ (accessed on 20 September 2003).
- Pixhawk 1 Flight Controller. Available online: https://docs.px4.io/v1.9.0/en/flight_controller/pixhawk.html (accessed on 21 October 2019).
- Cell Mapper. Cellular Tower and Signal Map. Available online: https://www.cellmapper.net/map (accessed on 20 May 2019).
- Unwired Labs. OpenCelliD. Available online: https://www.opencellid.org/ (accessed on 20 May 2019).
- Gyokov Solutions. G-NetTrack. Available online: https://gyokovsolutions.com/g-nettrack/ (accessed on 20 May 2019).
- Wilysis. Network Cell Info. Available online: http://wilysis.com/networkcellinfo/8-cellinfo (accessed on 6 March 2019).
- Jimenez, M.J.C.; Arana, K.; Arias, M.R. Outdoor-to-indoor propagation mechanisms in multistorey building for 0.85 GHz and 1.9 GHz bands. In Proceedings of the 2017 IEEE 37th Central America and Panama Convention (CONCAPAN XXXVII), Managua, Nicaragua, 15–17 November 2017; pp. 1–6. [Google Scholar]
- Widyasmoro, W.; Chamim, A.N.N.; Wiyagi, R.O.; Izmi, R.M.; Jusman, Y. Analysis and Optimization of 4G LTE Network in Jombang City East Java. J. Electr. Technol. UMY 2019, 3, 8–13. [Google Scholar]
- 3GPP TR 36.777. Enhanced LTE Support for Aerial Vehicles. Available online: https://portal.3gpp.org/desktopmodules/Specifications/SpecificationDetails.aspx?specificationId=3231 (accessed on 17 March 2021).
- 3GPP TR 38.901, “Study on Channel Model for Frequencies from 0.5 to 100 GHz”, V14.0.0. Available online: https://portal.3gpp.org/desktopmodules/Specifications/SpecificationDetails.aspx?specificationId=3173 (accessed on 17 March 2021).
- Monem, M.A.; Netmanias. Why No Soft Handover in LTE? 2016. Available online: https://www.netmanias.com/en/post/blog/11023/handover-lte/why-no-soft-handover-in-lte (accessed on 9 March 2021).
- Behjati, M.; Mazlan, M.H.; Ramly, A.M.; Nordin, R.; Ismail, M. What is the Value of Limited Feedback for Next Generation of Cellular Systems? Wirel. Pers. Commun. 2020, 110, 1127–1142. [Google Scholar] [CrossRef]
- Kilzi, A.; Farah, J.; Nour, C.A.; Douillard, C. Analysis of Drone Placement Strategies for Complete Interference Cancellation in Two-Cell NOMA CoMP Systems. IEEE Access 2020, 29, 179055–179069. [Google Scholar] [CrossRef]
- Nam, W.; Bai, D.; Lee, J.; Kang, I. Advanced interference management for 5G cellular network. IEEE Commun. Mag. 2014, 52, 52–60. [Google Scholar] [CrossRef]
- Liu, L.; Zhang, S.; Zhang, R. Multi-beam UAV communication in cellular uplink: Cooperative interference cancellation and sum-rate maximization. IEEE Trans. Wirel. Commun. 2019, 18, 4679–4691. [Google Scholar] [CrossRef]
























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Product Available on the Market | |||||
|---|---|---|---|---|---|
| XB Station [31] | Skydrone FPV [32] | Botlink [33] | Flytpi [34] | Raspberry pi [30] | |
| Diagram |  |  |  |  |  |
| Description | Real-time control with live-feed footage using 4G network Direct API telemetry data connection BVLoS drone control | Real-time control with live-feed footage using 4G network Direct API telemetry data connection BVLoS drone control Camera gimbal control Special software for drone users | Real-time control with live-feed footage using 4G network Direct API telemetry data connection BVLoS drone control | Real-time control with live-feed footage using 4G network Direct API telemetry data connection BVLoS drone control Direct plug and play concept Special software for drone users | Aimed for Real-time control with live-feed footage using 4G network Direct API telemetry data connection BVLoS drone control |
| Hardware Requirement | LTE modem Flight Controller Drone Camera Battery | Flight Controller Drone Battery | Flight Controller Drone Camera Battery | LTE modem Flight Controller Drone Camera Battery | LTE modem Flight Controller Drone Camera Battery |
| Software | XB Firm | Sky Drone FPV | Botlink Relay | Flyt OS | UAVcast-Pro [35] |
| Price | $430 OTP $20/month | $999OTP | $1400 OTP $10/month | $399 OTP $499/year | $39 OTP $59/year |
| Elevation | 0 m | 40 m | 80 m | 170 m |
|---|---|---|---|---|
| Average Uplink Throughput (kbps) | 6451 | 5245 | 5051 | 6737 |
| Average Downlink Throughput (kbps) | 41,332 | 20,164 | 24,699 | 7893 |
| Average delay (ms) | 25.4 | 24.73 | 23.44 | 36.63 |
| Cell ID | Height (m) |
|---|---|
| 1 | 105 |
| 2 | 94 |
| 11 | 137 |
| 12 | 198 |
| 14 | 56 |
| 16 | 105 |
| 42 | 105 |
| 41 | 88 |
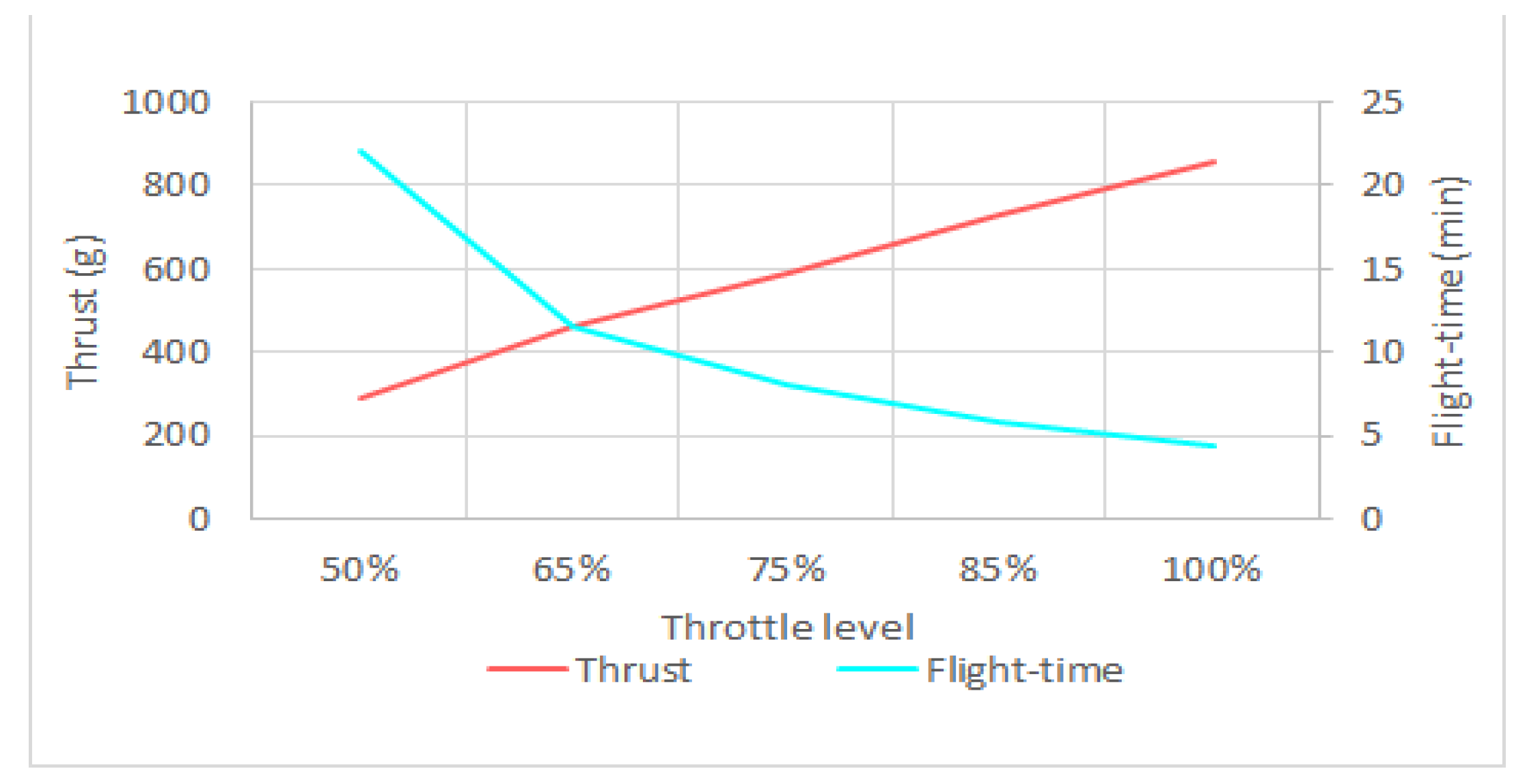
| Throttle | Current (A) | Power (W) | Thrust (g) | Efficiency (g/W) | Temperature (°C) |
|---|---|---|---|---|---|
| 50% | 2.6 | 28.9 | 290 | 10.0 | 55 °C |
| 65% | 5.1 | 56.6 | 460 | 8.1 | |
| 75% | 7.4 | 82.1 | 590 | 7.2 | |
| 85% | 10.1 | 112.1 | 730 | 6.5 | |
| 100% | 13.4 | 148.7 | 860 | 5.8 |
| Component | Current (I) | Power (W) | Percentage |
|---|---|---|---|
| Raspberry Pi | 360 mA | 1.8 W | 49.29% |
| Pi Camera | 90 mA | 0.45 W | 12.32% |
| LTE Modem | 290 mA | 1.45 W | 38.34% |
| GPS Module | 0.06 mA | 0.003 W | 0.01% |
| Pixhawk FC | 0.25 mA | 0.0125 W | 0.03% |
| Total | 730.31mA | 3.7155 W | 100% |
| 3GPP Standard | Performance Based on Field Test | |||
| Command and Control | Application Data | TCP | UDP | |
| Data type example |
|
|
|
|
| Latency |
|
|
| |
| Uplink/downlink data rate |
|
|
| |
| Conventional Drone | LTE-Powered Drone | |
|---|---|---|
| Data type | Telemetry data Autonomous waypoints update Real-time drone control Video streaming Image feed | Telemetry data Autonomous waypoints update Real-time drone control Video streaming Image feed Real time GPS tracking Navigation database update Transmission for other sensor data |
| Frequency | Telemetry: ~2.4 GHz Video: ~5.0 GHz | 4G LTE~2.6 GHz |
| Flight distance | Line of sight | Beyond the line of sight |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zulkifley, M.A.; Behjati, M.; Nordin, R.; Zakaria, M.S. Mobile Network Performance and Technical Feasibility of LTE-Powered Unmanned Aerial Vehicle. Sensors 2021, 21, 2848. https://doi.org/10.3390/s21082848
Zulkifley MA, Behjati M, Nordin R, Zakaria MS. Mobile Network Performance and Technical Feasibility of LTE-Powered Unmanned Aerial Vehicle. Sensors. 2021; 21(8):2848. https://doi.org/10.3390/s21082848
Chicago/Turabian StyleZulkifley, Muhammad Aidiel, Mehran Behjati, Rosdiadee Nordin, and Mohamad Shanudin Zakaria. 2021. "Mobile Network Performance and Technical Feasibility of LTE-Powered Unmanned Aerial Vehicle" Sensors 21, no. 8: 2848. https://doi.org/10.3390/s21082848
APA StyleZulkifley, M. A., Behjati, M., Nordin, R., & Zakaria, M. S. (2021). Mobile Network Performance and Technical Feasibility of LTE-Powered Unmanned Aerial Vehicle. Sensors, 21(8), 2848. https://doi.org/10.3390/s21082848