
Data-Driven Object Vehicle Estimation by Radar Accuracy Modeling with Weighted Interpolation †


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
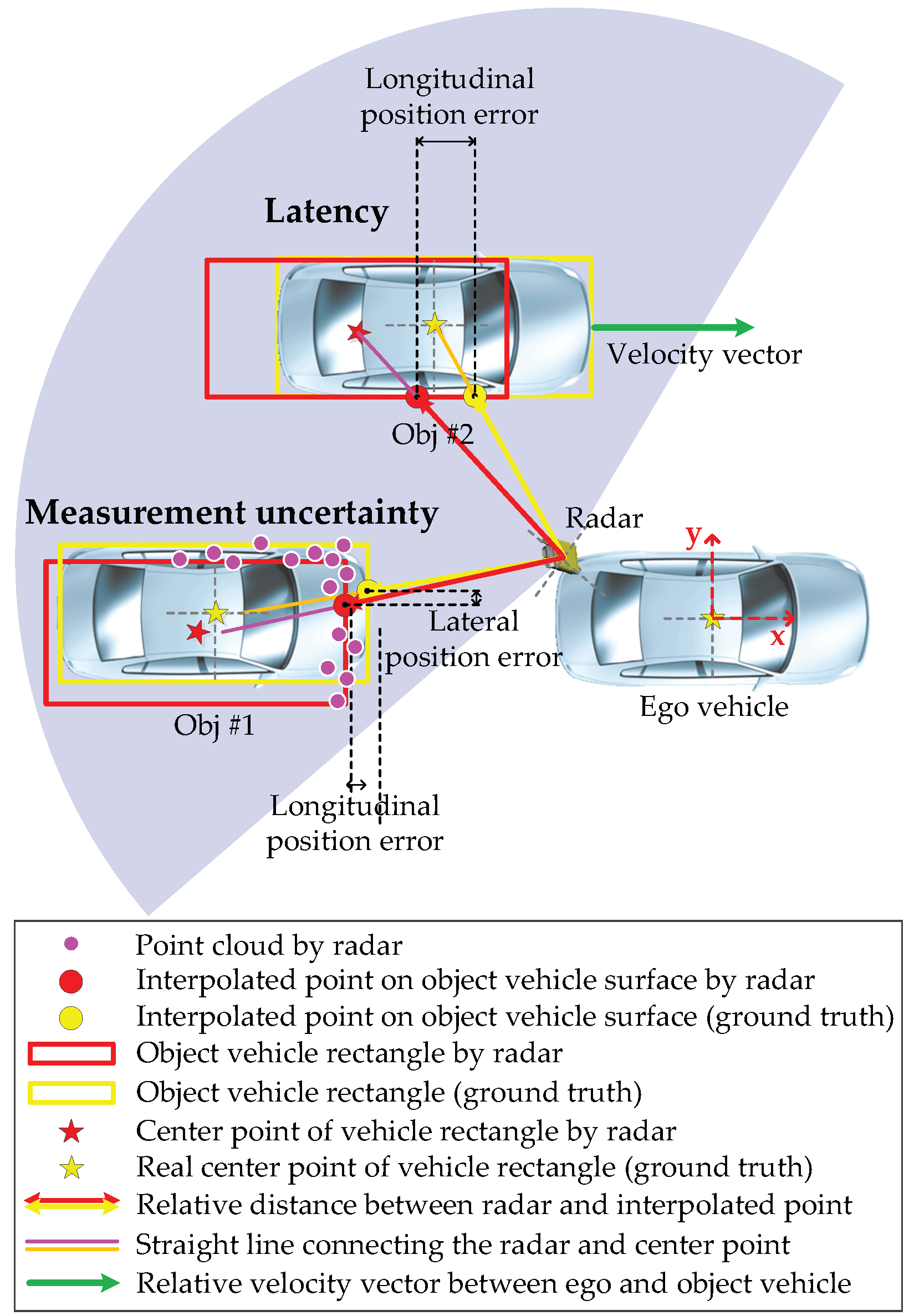
2. Problem Statement
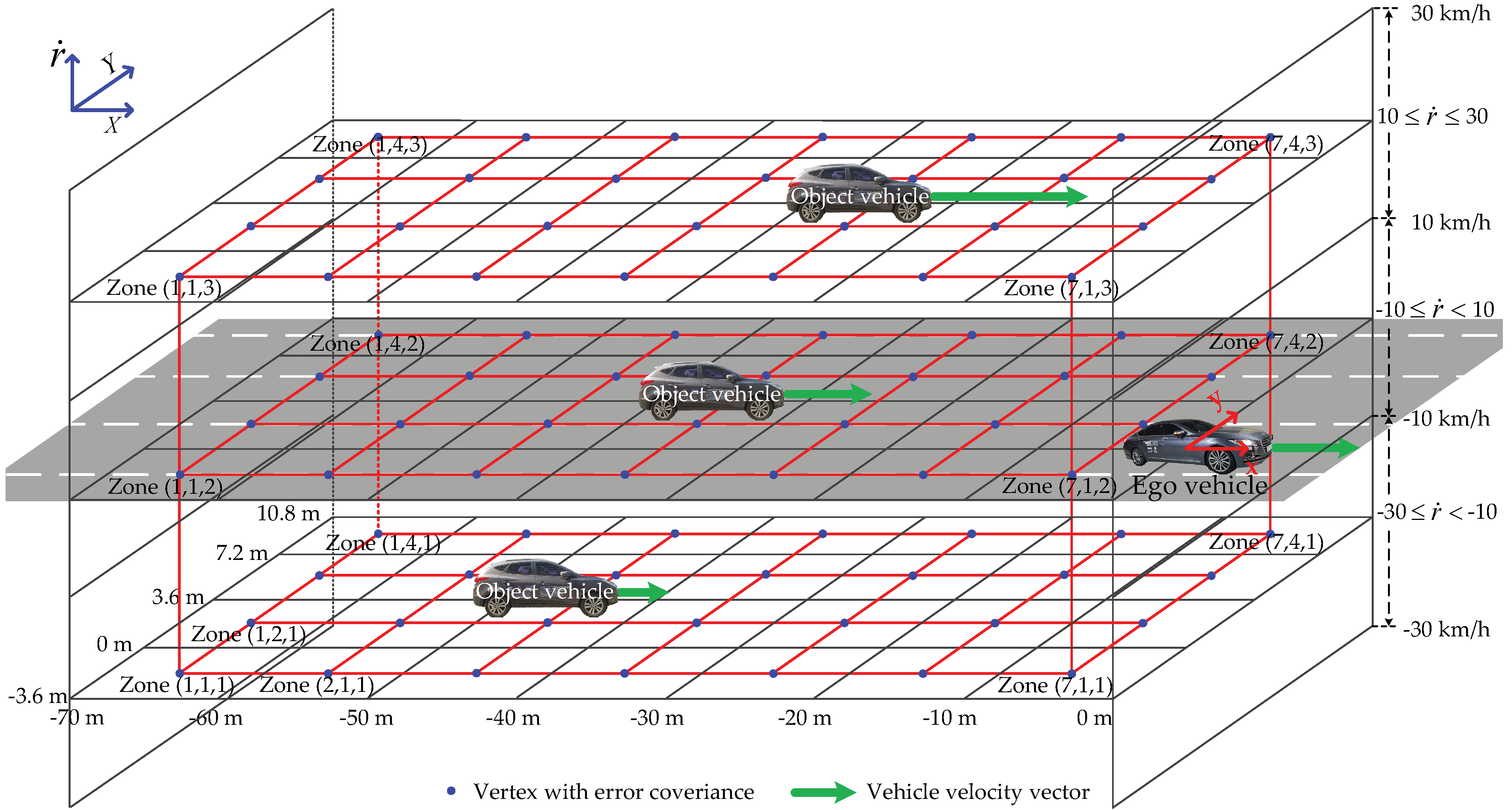
3. Data-Driven Radar Accuracy Modeling
4. Object Tracking with Weighted Interpolation
4.1. Estimation with Error Characteristic
4.2. Latency Coordination
5. Application
5.1. Experimental Setup
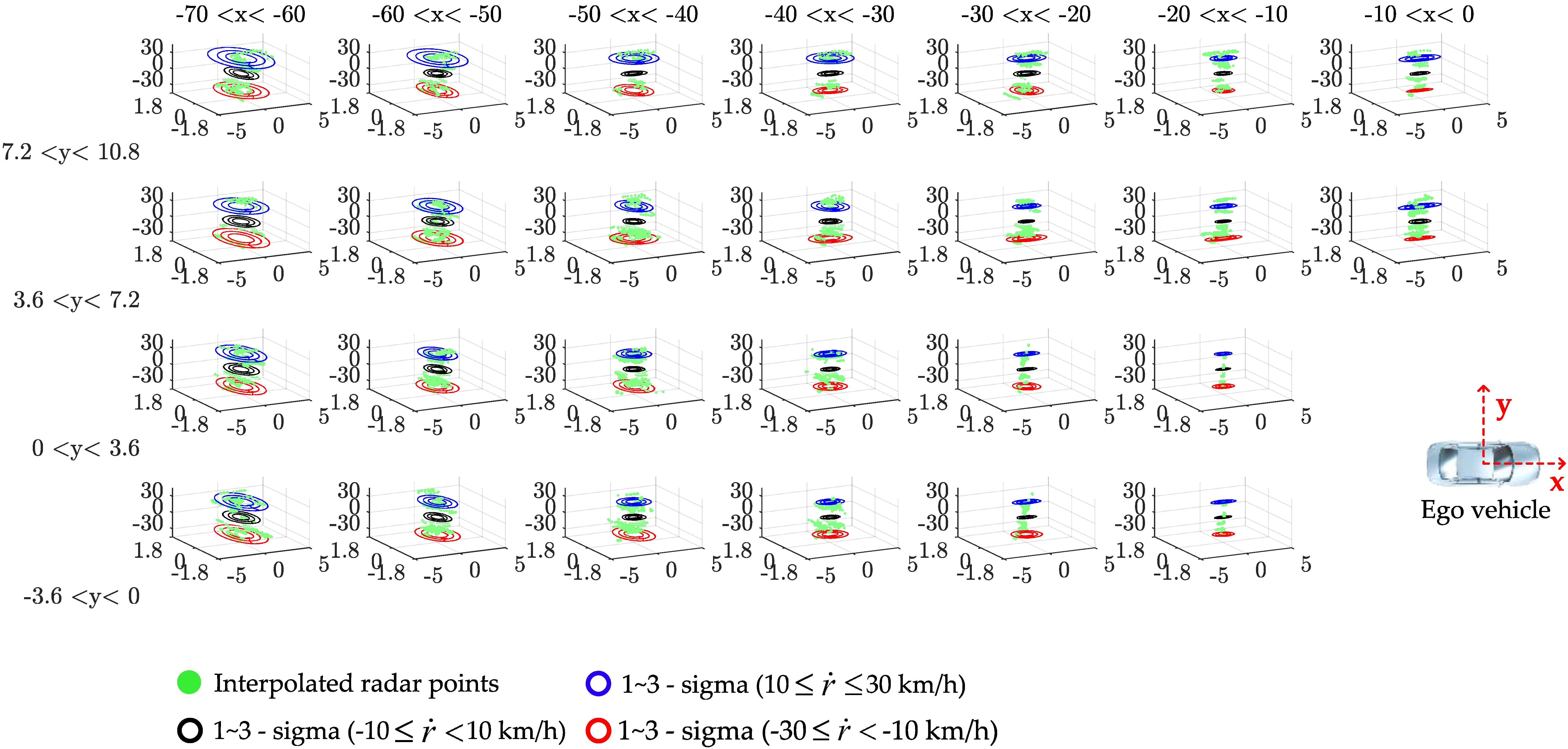
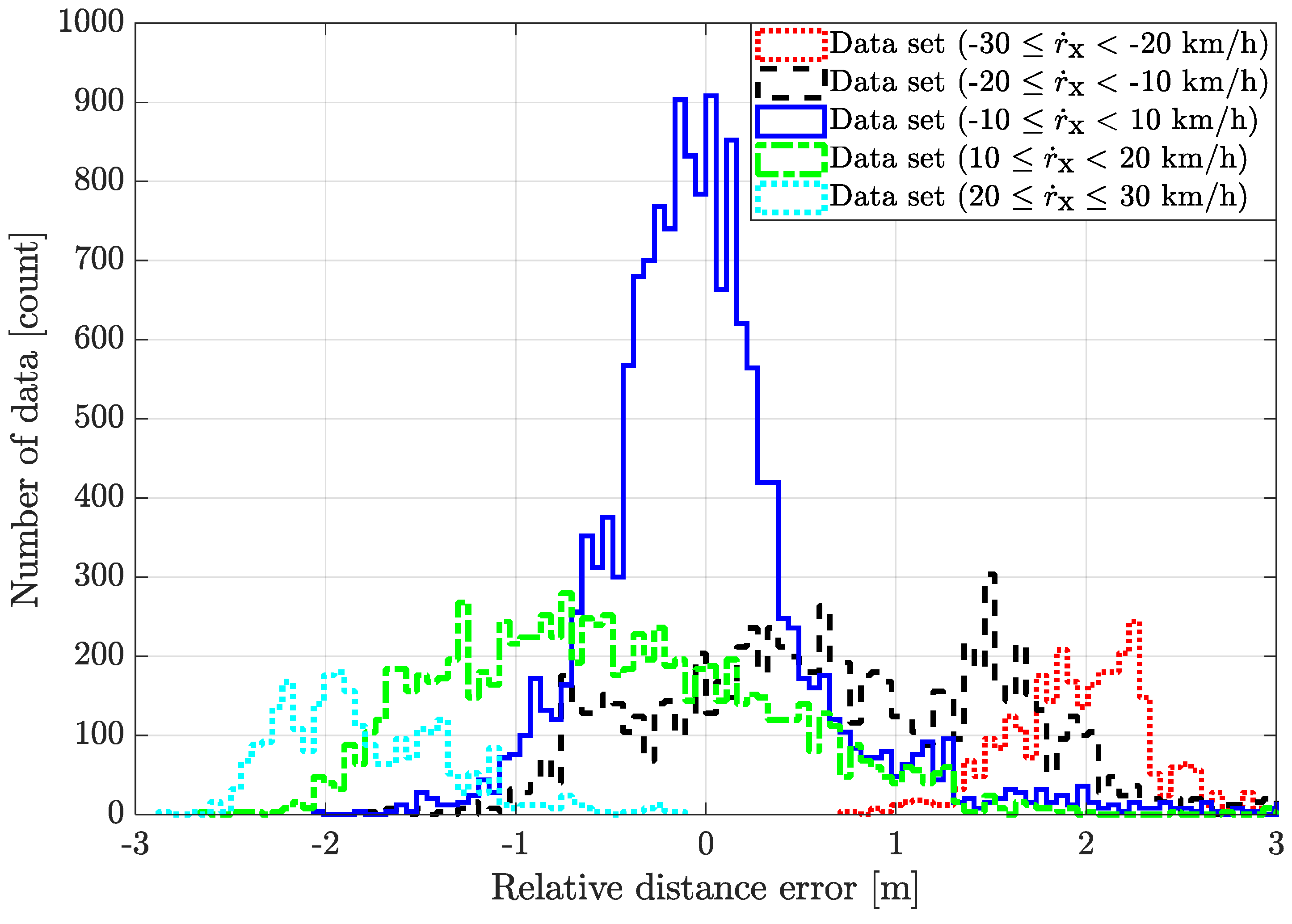
5.2. Radar Accuracy Analysis
- (i)
- The average position error of the data set ( km/h) is 1.968 m.
- (ii)
- The average position error of the data set ( km/h) is 0.709 m.
- (iii)
- The average position error of the data set ( 10 km/h) is 0.018 m.
- (iv)
- The average position error of the data set (10 20 km/h) is −0.511 m.
- (v)
- The average position error of the data set (20 30 km/h) is −1.793 m.
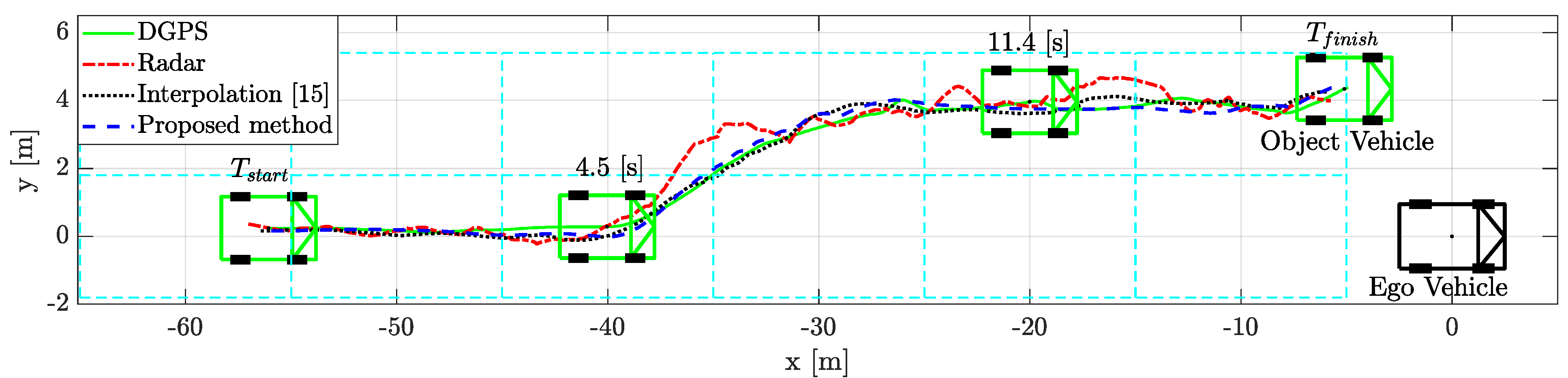
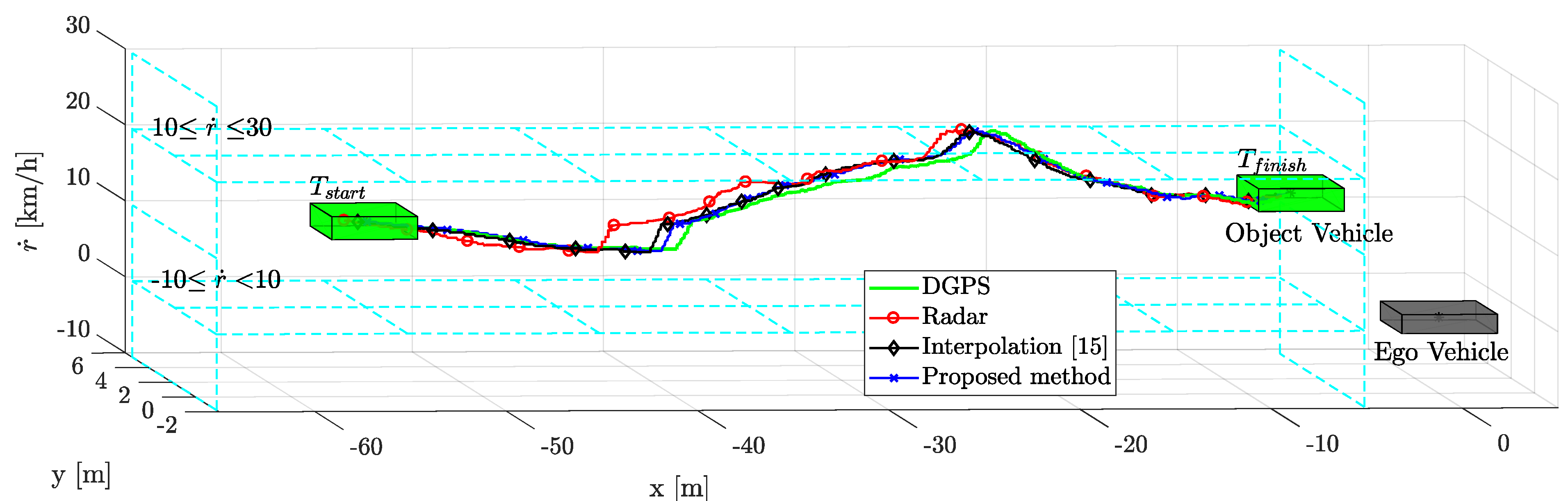
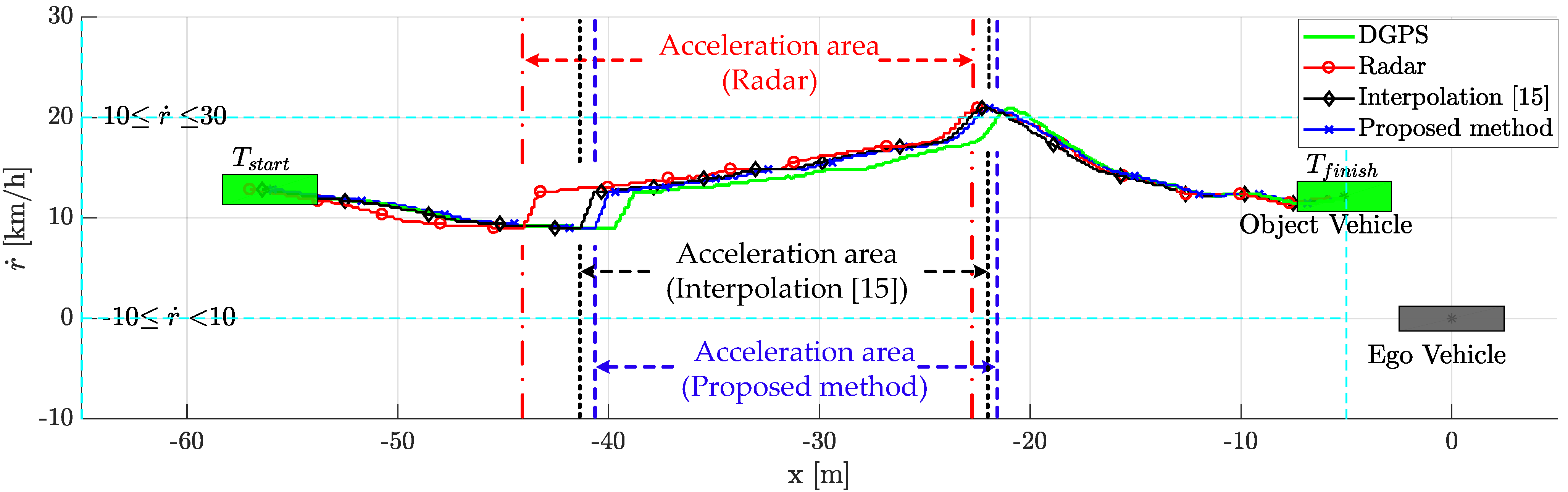
5.3. Scenario-Based Experimental Result
5.4. Performance Analysis with Limitation
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Eskandarian, A. Handbook of Intelligent Vehicles; Springer: London, UK, 2012. [Google Scholar]
- Rajamani, R. Vehicle Dynamics and Control; Springer Science & Business Media: New York, NY, USA, 2011. [Google Scholar]
- Lin, P.; Choi, W.Y.; Chung, C.C. Local Path Planning Using Artificial Potential Field for Waypoint Tracking with Collision Avoidance. In Proceedings of the International Conference on Intelligent Transportation Systems (ITSC), Rhodes, Greece, 20–23 September 2020; pp. 1–7. [Google Scholar]
- Choi, W.Y.; Lee, S.H.; Chung, C.C. Robust Vehicular Lane Tracking Control with Winding Road Disturbance Compensator. IEEE Trans. Ind. Inform. 2020. [Google Scholar] [CrossRef]
- Yang, J.H.; Choi, W.Y.; Chung, C.C. Driving environment assessment and decision making for cooperative lane change system of autonomous vehicles. Asian J. Control 2020, 1–11. [Google Scholar] [CrossRef]
- Lee, H.; Kang, C.M.; Kim, W.; Choi, W.Y.; Chung, C.C. Predictive risk assessment using cooperation concept for collision avoidance of side crash in autonomous lane change systems. In Proceedings of the International Conference on Control, Automation and Systems, Jeju, Korea, 18–21 October 2017; pp. 47–52. [Google Scholar]
- Kellner, D.; Barjenbruch, M.; Klappstein, J.; Dickmann, J.; Dietmayer, K. Tracking of extended objects with high-resolution Doppler radar. IEEE Trans. Intell. Transp. Syst. 2015, 17, 1341–1353. [Google Scholar] [CrossRef]
- Roos, F.; Kellner, D.; Klappstein, J.; Dickmann, J.; Dietmayer, K.; Muller-Glaser, K.D.; Waldschmidt, C. Estimation of the orientation of vehicles in high-resolution radar images. In Proceedings of the International Conference on Microwaves for Intelligent Mobility, Heidelberg, Germany, 27–29 April 2015; pp. 1–4. [Google Scholar]
- Kim, B.; Yi, K.; Yoo, H.J.; Chong, H.J.; Ko, B. An IMM/EKF approach for enhanced multitarget state estimation for application to integrated risk management system. IEEE Trans. Veh. Technol. 2015, 64, 876–889. [Google Scholar] [CrossRef]
- Yeddanapudi, M.; Bar-Shalom, Y.; Pattipati, K. IMM estimation for multitarget-multisensor air traffic surveillance. Proc. IEEE 1997, 85, 80–96. [Google Scholar] [CrossRef]
- Gustafsson, F.; Gunnarsson, F.; Bergman, N.; Forssell, U.; Jansson, J.; Karlsson, R.; Nordlund, P.J. Particle filters for positioning, navigation, and tracking. IEEE Trans. Signal Process. 2002, 50, 425–437. [Google Scholar] [CrossRef]
- Kulikov, G.Y.; Kulikova, M.V. Accurate continuous–discrete unscented Kalman filtering for estimation of nonlinear continuous-time stochastic models in radar tracking. Signal Process. 2017, 139, 25–35. [Google Scholar] [CrossRef]
- Bar-Shalom, Y.; Li, X.R.; Kirubarajan, T. Estimation with Applications to Tracking and Navigation: Theory Algorithms and Software; John Wiley & Sons: Hoboken, NJ, USA, 2004. [Google Scholar]
- Choi, W.Y.; Kang, C.M.; Lee, S.H.; Chung, C.C. Radar Accuracy Modeling and Its Application to Object Vehicle Tracking. Int. J. Control Autom. Syst. 2020, 18, 3146–3158. [Google Scholar] [CrossRef]
- Choi, W.Y.; Yang, J.H.; Lee, S.H.; Chung, C.C. Object Vehicle Tracking by Convex Interpolation with Radar Accuracy. In Proceedings of the 2019 19th International Conference on Control, Automation and Systems (ICCAS), Jeju, Korea, 15–18 October 2019; pp. 1589–1593. [Google Scholar]
- Alland, S.; Stark, W.; Ali, M.; Hegde, M. Interference in automotive radar systems: Characteristics, mitigation techniques, and current and future research. Signal Process. Mag. 2019, 36, 45–59. [Google Scholar] [CrossRef]
- Averbuch, A.; Itzikowitz, S.; Kapon, T. Radar target tracking-Viterbi versus IMM. IEEE Trans. Aerosp. Electron. Syst. 1991, 27, 550–563. [Google Scholar] [CrossRef]
- Kirubarajan, T.; Bar-Shalom, Y.; Pattipati, K.R.; Kadar, I. Ground target tracking with variable structure IMM estimator. IEEE Trans. Aerosp. Electron. Syst. 2000, 36, 26–46. [Google Scholar] [CrossRef]
- Ebert, J.; Gumpp, T.; Münzner, S.; Matskevych, A.; Condurache, A.P.; Gläser, C. Deep Radar Sensor Models for Accurate and Robust Object Tracking. In Proceedings of the International Conference on Intelligent Transportation Systems (ITSC), Rhodes, Greece, 20–23 September 2020; pp. 1–6. [Google Scholar]
- Alessandretti, G.; Broggi, A.; Cerri, P. Vehicle and guard rail detection using radar and vision data fusion. IEEE Trans. Intell. Transp. Syst. 2007, 8, 95–105. [Google Scholar] [CrossRef]
- Cho, H.; Seo, Y.W.; Kumar, B.V.; Rajkumar, R.R. A multi-sensor fusion system for moving object detection and tracking in urban driving environments. In Proceedings of the IEEE International Conference on Robotics and Automation, Hong Kong, China, 31 May–7 June 2014; pp. 1836–1843. [Google Scholar]
- Wu, S.; Decker, S.; Chang, P.; Camus, T.; Eledath, J. Collision sensing by stereo vision and radar sensor fusion. IEEE Trans. Intell. Transp. Syst. 2009, 10, 606–614. [Google Scholar]
- Chavez-Garcia, R.O.; Aycard, O. Multiple Sensor Fusion and Classification for Moving Object Detection and Tracking. IEEE Trans. Intell. Transp. Syst. 2016, 17, 525–534. [Google Scholar] [CrossRef]
- Kim, K.E.; Lee, C.J.; Pae, D.S.; Lim, M.T. Sensor fusion for vehicle tracking with camera and radar sensor. In Proceedings of the International Conference on Control, Automation and Systems, Jeju, Korea, 18–21 October 2017; pp. 1075–1077. [Google Scholar]
- Kim, T.; Park, T.H. Extended Kalman filter (EKF) design for vehicle position tracking using reliability function of radar and lidar. Sensors 2020, 20, 4126. [Google Scholar] [CrossRef]
- Nobis, F.; Geisslinger, M.; Weber, M.; Betz, J.; Lienkamp, M. A deep learning-based radar and camera sensor fusion architecture for object detection. In Proceedings of the 2019 Sensor Data Fusion: Trends, Solutions, Applications (SDF), Bonn, Germany, 15–17 October 2019; pp. 1–7. [Google Scholar]
- Jha, H.; Lodhi, V.; Chakravarty, D. Object detection and identification using vision and radar data fusion system for ground-based navigation. In Proceedings of the International Conference on Signal Processing and Integrated Networks, Noida, India, 7–8 March 2019; pp. 590–593. [Google Scholar]
- Muntzinger, M.M.; Aeberhard, M.; Zuther, S.; Maehlisch, M.; Schmid, M.; Dickmann, J.; Dietmayer, K. Reliable automotive pre-crash system with out-of-sequence measurement processing. In Proceedings of the 2010 IEEE Intelligent Vehicles Symposium, La Jolla, CA, USA, 21–24 June 2010; pp. 1022–1027. [Google Scholar]
- Wielgo, M.; Misiurewicz, J.; Radecki, K. Processing latency effects on resource management in rotating AESA radar. In Proceedings of the 2017 18th International Radar Symposium (IRS), Prague, Czech Republic, 28–30 June 2017; pp. 1–10. [Google Scholar]
- Supradeepa, V.; Long, C.M.; Wu, R.; Ferdous, F.; Hamidi, E.; Leaird, D.E.; Weiner, A.M. Comb-based radiofrequency photonic filters with rapid tunability and high selectivity. Nat. Photonics 2012, 6, 186–194. [Google Scholar] [CrossRef]
- Klotz, M.; Rohling, H. 24 GHz radar sensors for automotive applications. J. Telecommun. Inf. Technol. 2001, 4, 11–14. [Google Scholar]
- Parashar, K.N.; Oveneke, M.C.; Rykunov, M.; Sahli, H.; Bourdoux, A. Micro-Doppler feature extraction using convolutional auto-encoders for low latency target classification. In Proceedings of the 2017 IEEE Radar Conference (RadarConf), Seattle, WA, USA, 8–12 May 2017; pp. 1739–1744. [Google Scholar]
- de Ponte Müller, F. Survey on ranging sensors and cooperative techniques for relative positioning of vehicles. Sensors 2017, 17, 271. [Google Scholar] [CrossRef]
- Angelov, A.; Robertson, A.; Murray-Smith, R.; Fioranelli, F. Practical classification of different moving targets using automotive radar and deep neural networks. IET Radar Sonar Navig. 2018, 12, 1082–1089. [Google Scholar] [CrossRef]
- Karunasekera, H.; Wang, H.; Zhang, H. Multiple object tracking with attention to appearance, structure, motion and size. IEEE Access 2019, 7, 104423–104434. [Google Scholar] [CrossRef]
- Kang, C.M.; Lee, S.H.; Chung, C.C. Vehicle lateral motion estimation with its dynamic and kinematic models based interacting multiple model filter. In Proceedings of the Conference on Decision and Control (CDC), Las Vegas, NV, USA, 12–14 December 2016; pp. 2449–2454. [Google Scholar]
- Li, X.R.; Jilkov, V.P. Survey of maneuvering target tracking. Part I. Dynamic models. IEEE Trans. Aerosp. Electron. Syst. 2003, 39, 1333–1364. [Google Scholar]
- Myers, K.; Tapley, B. Adaptive sequential estimation with unknown noise statistics. IEEE Trans. Autom. Control 1976, 21, 520–523. [Google Scholar] [CrossRef]
- Grewal, M.; Andrews, A. Kalman Filtering: Theory and Practice with MATLAB, 4th ed.; John Wiley & Sons: Hoboken, NJ, USA, 2015. [Google Scholar]
- Choi, W.Y.; Kim, D.J.; Kang, C.M.; Lee, S.H.; Chung, C.C. Autonomous vehicle lateral maneuvering by approximate explicit predictive control. In Proceedings of the Annual American Control Conference (ACC), Milwaukee, WI, USA, 27–29 June 2018; pp. 4739–4744. [Google Scholar]
- Rühaak, W. A Java application for quality weighted 3-d interpolation. Comput. Geosci. 2006, 32, 43–51. [Google Scholar] [CrossRef]
- Stubberud, S.C.; Kramer, K.A. Monitoring the Kalman gain behavior for maneuver detection. In Proceedings of the 2017 25th International Conference on Systems Engineering (ICSEng), Las Vegas, NV, USA, 22–24 August 2017; pp. 39–44. [Google Scholar]
- Zhang, D.; Xu, Z.; Karimi, H.R.; Wang, Q.G. Distributed filtering for switched linear systems with sensor networks in presence of packet dropouts and quantization. IEEE Trans. Circuits Syst. I Regul. Pap. 2017, 64, 2783–2796. [Google Scholar] [CrossRef]
- Nishigaki, M.; Rebhan, S.; Einecke, N. Vision-based lateral position improvement of radar detections. In Proceedings of the 2012 15th International IEEE Conference on Intelligent Transportation Systems, Anchorage, AK, USA, 16–19 September 2012; pp. 90–97. [Google Scholar]














Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Choi, W.Y.; Yang, J.H.; Chung, C.C. Data-Driven Object Vehicle Estimation by Radar Accuracy Modeling with Weighted Interpolation. Sensors 2021, 21, 2317. https://doi.org/10.3390/s21072317
Choi WY, Yang JH, Chung CC. Data-Driven Object Vehicle Estimation by Radar Accuracy Modeling with Weighted Interpolation. Sensors. 2021; 21(7):2317. https://doi.org/10.3390/s21072317
Chicago/Turabian StyleChoi, Woo Young, Jin Ho Yang, and Chung Choo Chung. 2021. "Data-Driven Object Vehicle Estimation by Radar Accuracy Modeling with Weighted Interpolation" Sensors 21, no. 7: 2317. https://doi.org/10.3390/s21072317
APA StyleChoi, W. Y., Yang, J. H., & Chung, C. C. (2021). Data-Driven Object Vehicle Estimation by Radar Accuracy Modeling with Weighted Interpolation. Sensors, 21(7), 2317. https://doi.org/10.3390/s21072317