
A Signal Processing Algorithm of Two-Phase Staggered PRI and Slow Time Signal Integration for MTI Triangular FMCW Multi-Target Tracking Radars



Abstract
1. Introduction
2. The FMCW Radar Transmitter
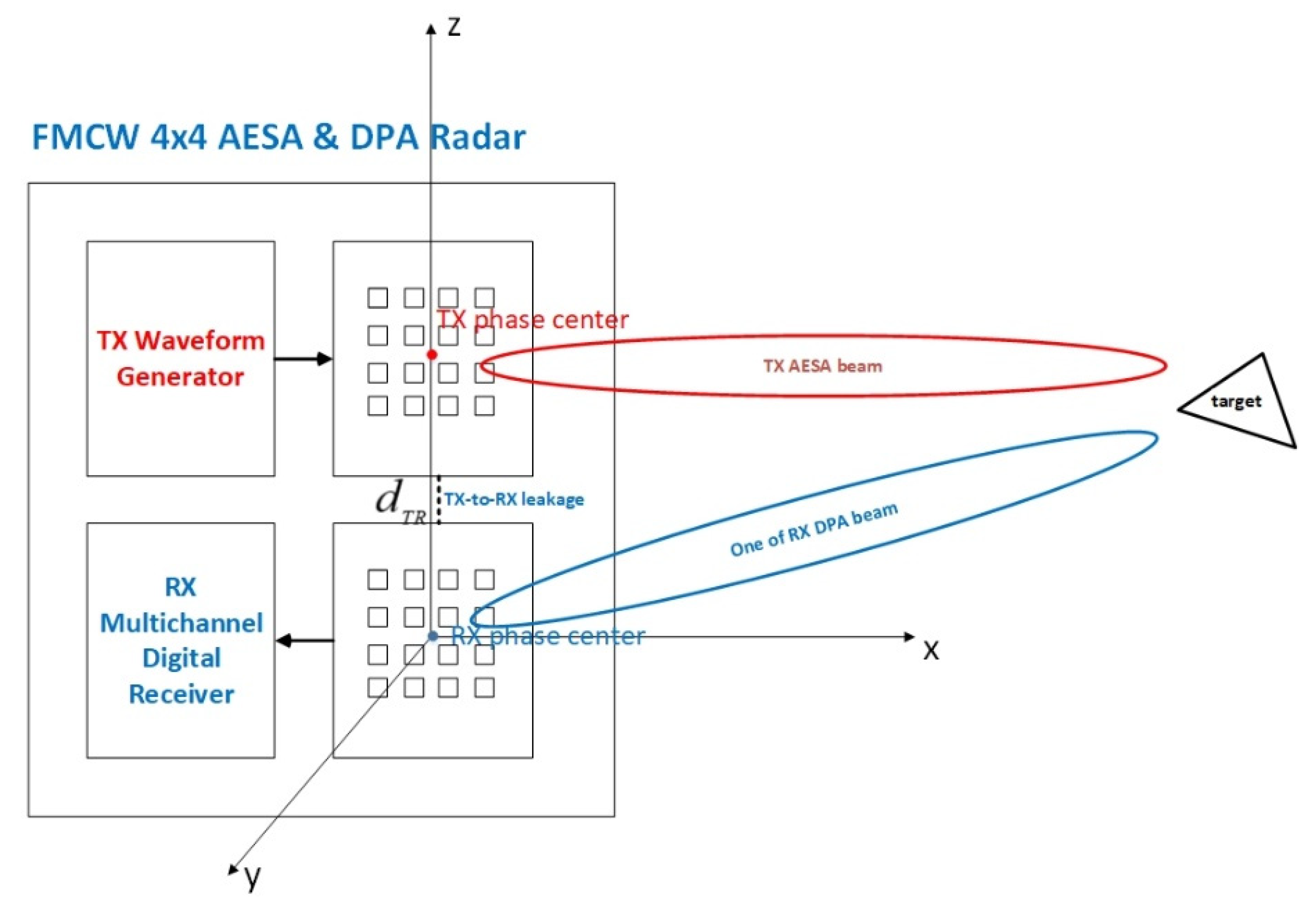
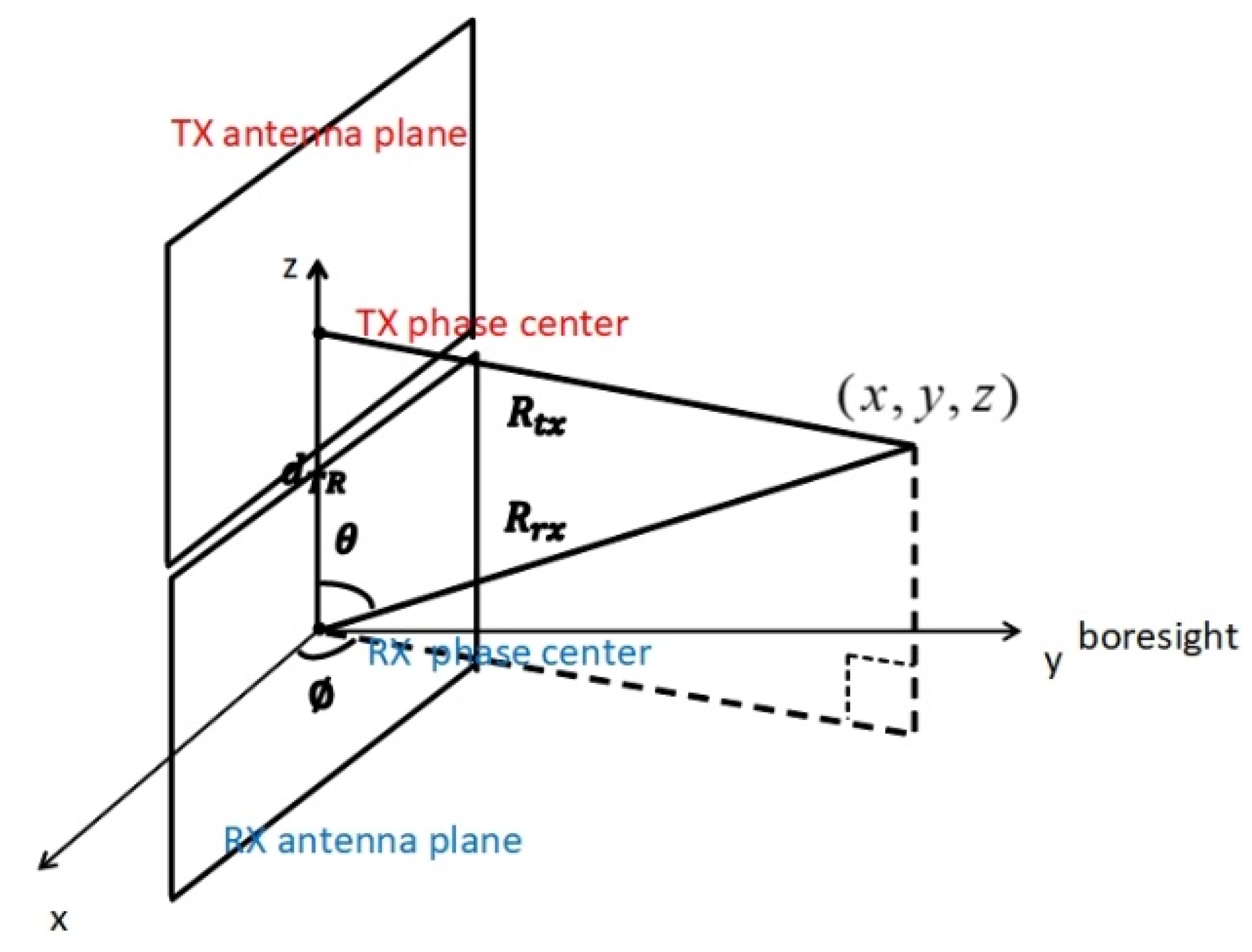
2.1. The FMCW Radar System Overview
2.2. The AESA Radar Transmitter
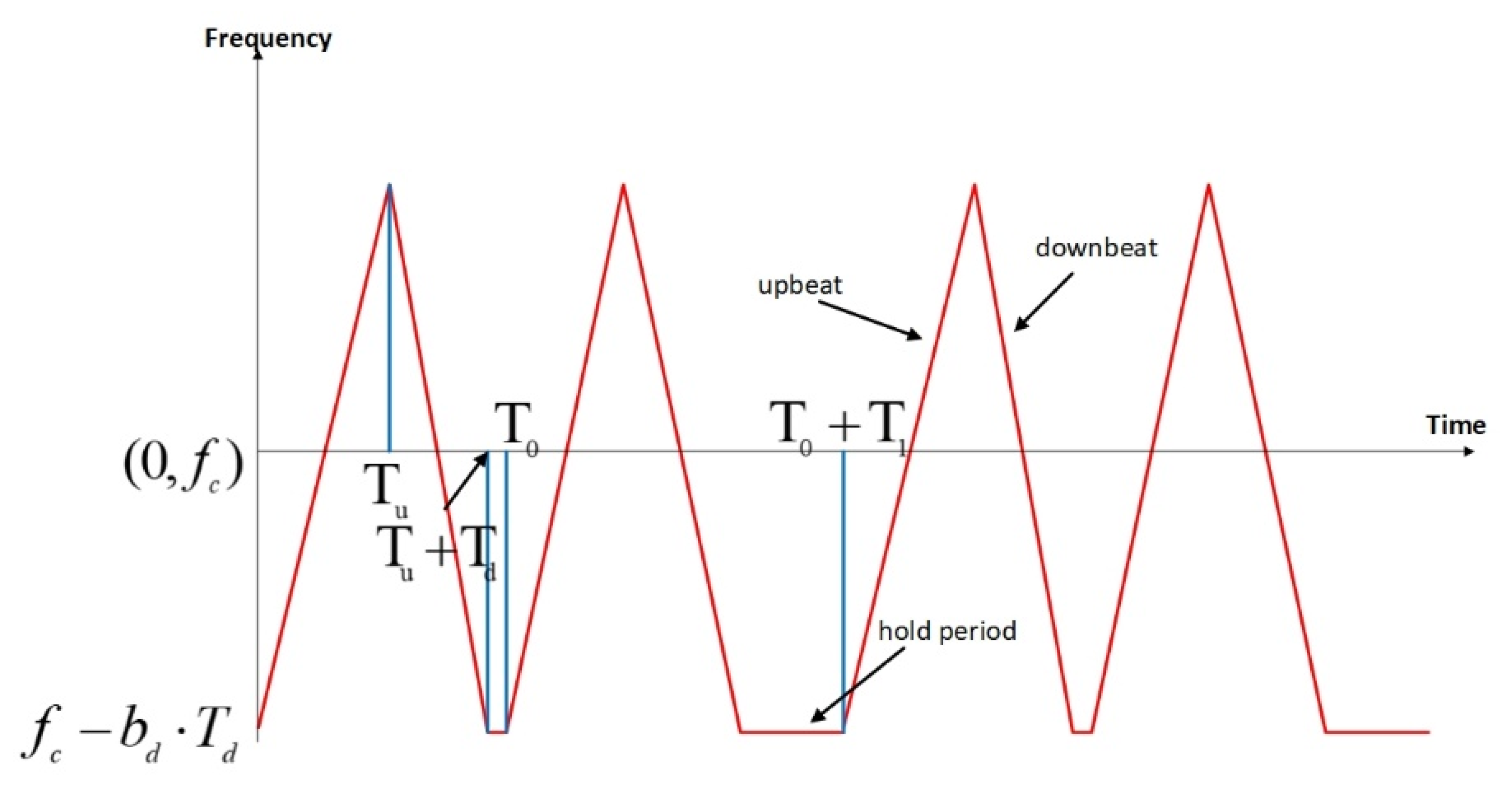
2.3. TPS Triangular FMCW Waveform
2.4. Generating TPS Triangular FMCW Waveform Using Digital Modulation
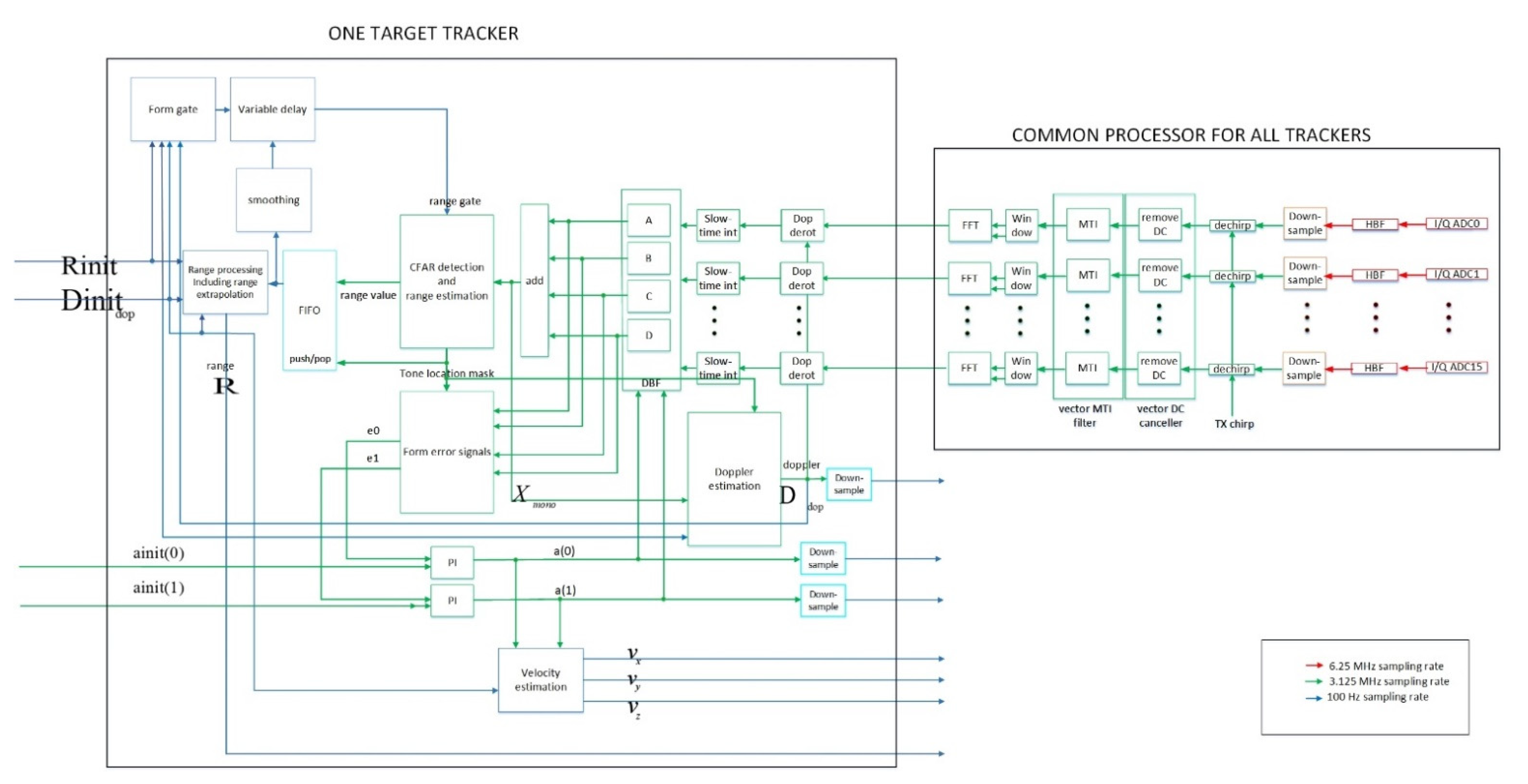
3. Digital Phased Array Receiver
3.1. Receiver Diagram
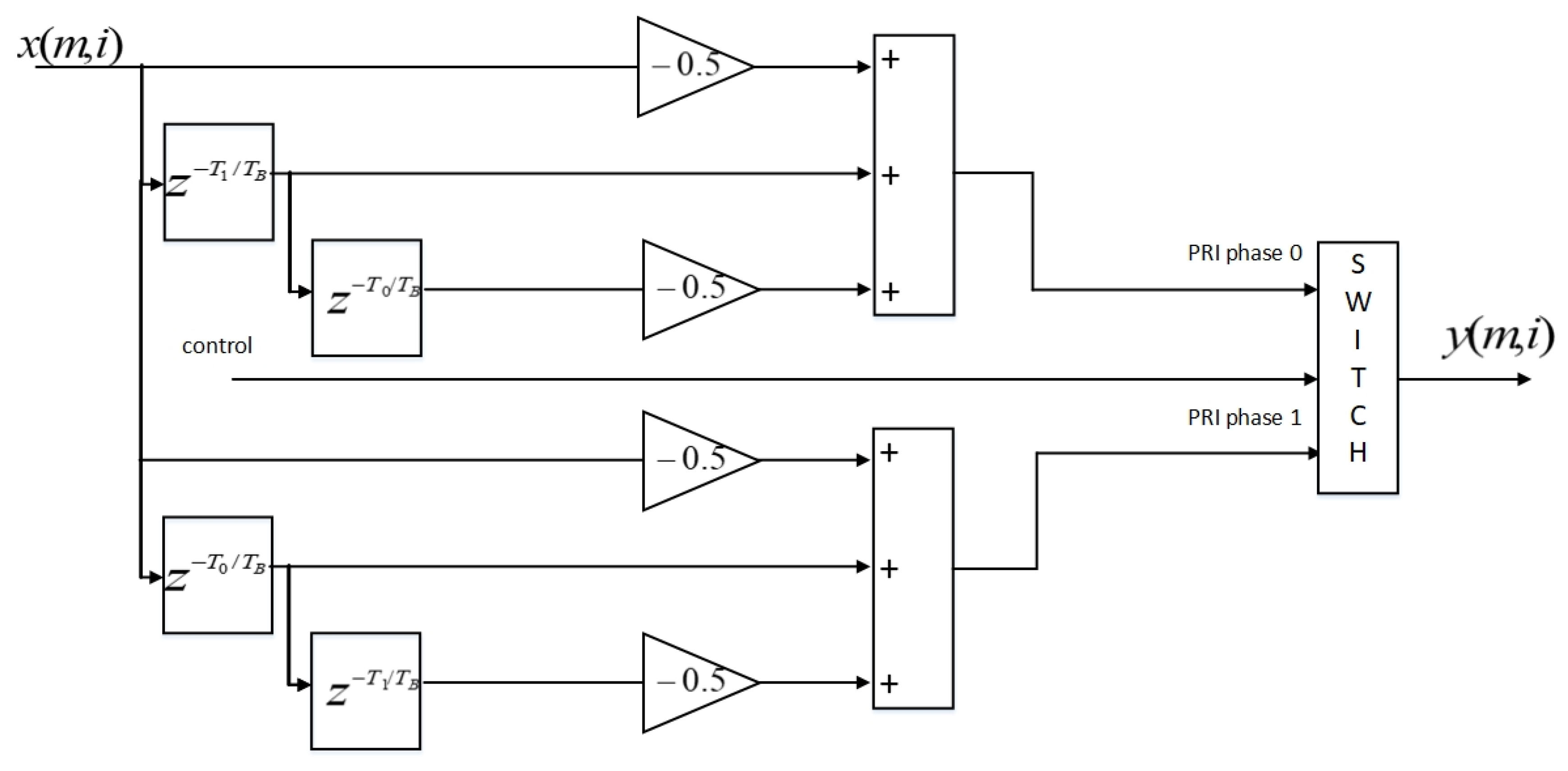
3.2. Per-RX Antenna Staggered PRI MTI Filter Implementation
3.3. Slow Time Signal Integration Module
3.4. Doppler Estimation Module
4. Results and Discussion
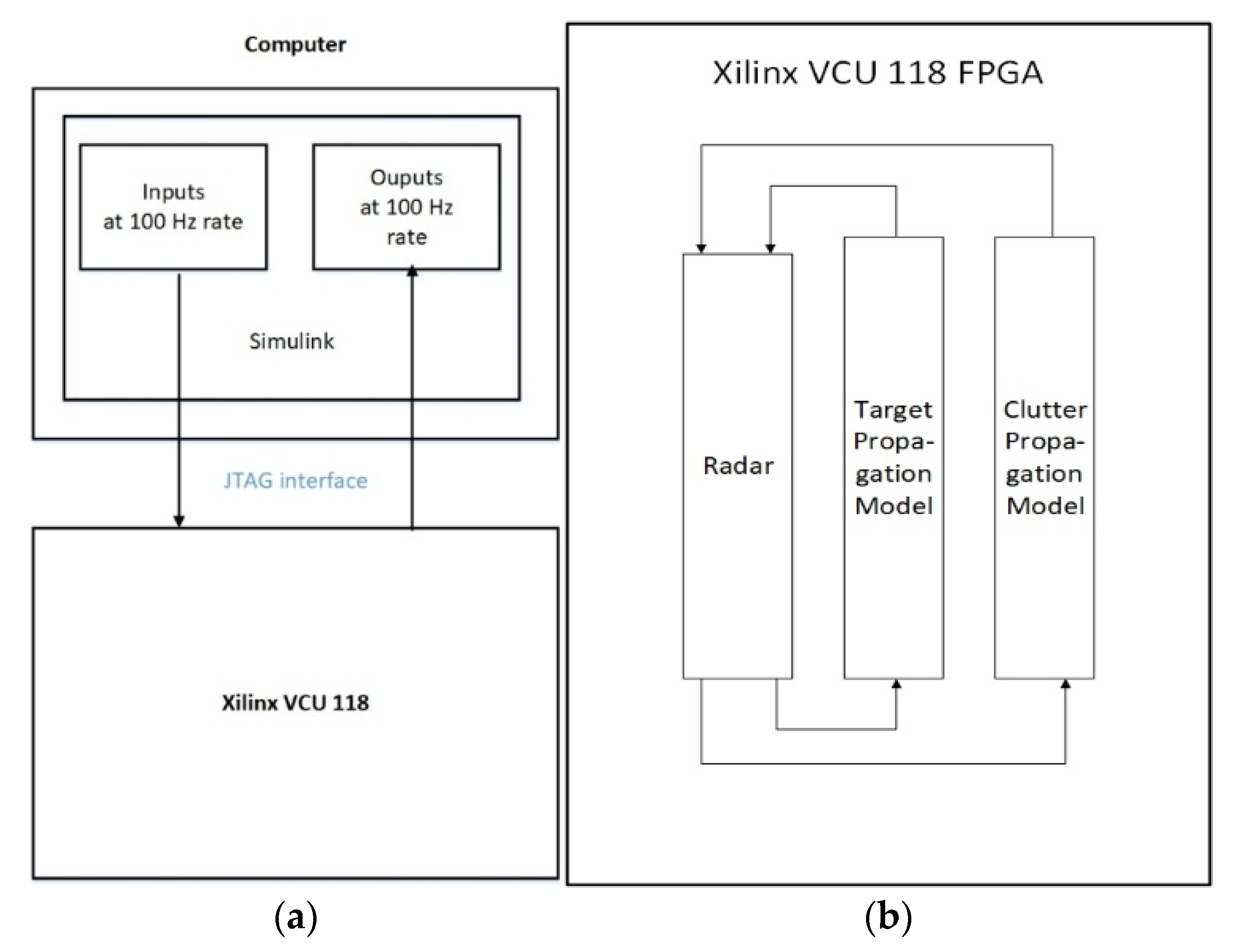
4.1. The FPGA-in-the-Loop Simulation Test Bed
4.2. The Simulation Parameters
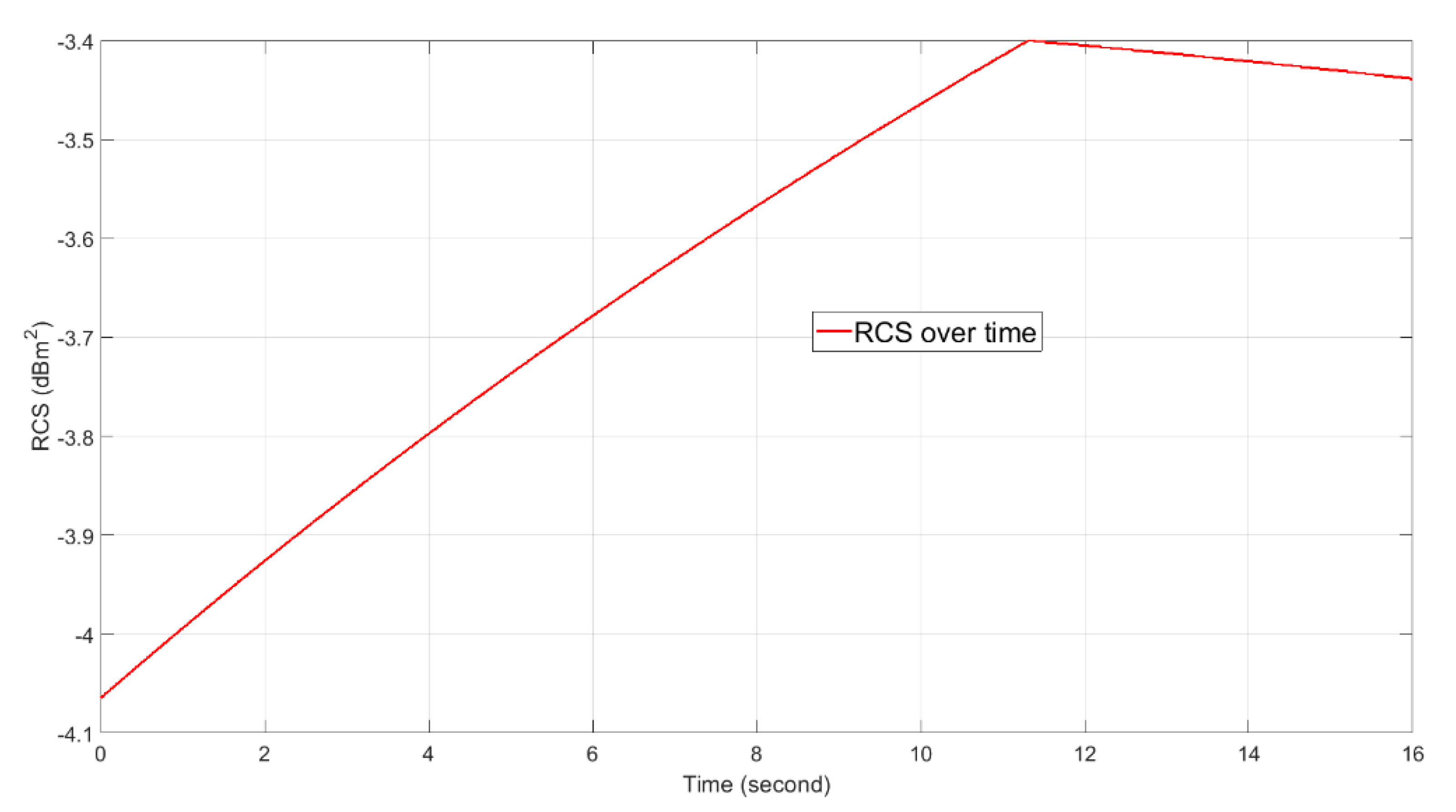
4.3. Simulation Results
4.4. Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Melvin, W.L.; Scheer, J.A. Principles of Modern Radar: Radar Applications; Scitech Publishing: Raleigh, NC, USA, 2014. [Google Scholar]
- Brookner, E. Phased-array and radar astounding breakthroughs—An update. In Proceedings of the 2008 IEEE Radar Conference, Rome, Italy, 26–30 May 2008; pp. 1–6. [Google Scholar] [CrossRef]
- Kinghorn, T.; Scott, I.; Totten, E. Recent advances in airborne phased array radar systems. In Proceedings of the 2016 IEEE International Symposium on Phased Array Systems and Technology (PAST), Waltham, MA, USA, 26 January 2016; pp. 1–7. [Google Scholar] [CrossRef]
- Stove, A.G. Linear FMCW Radar Techniques. In IEE Proceedings F (Radar and Signal Processing); IET Digital Library, 1992; Volume 139, pp. 343–350. Available online: https://digital-library.theiet.org/content/journals/10.1049/ip-f-2.1992.0048 (accessed on 22 January 2020).
- Filippo, N. Introduction to Electronic Defense Systems, 2nd ed.; Artech House: London, UK, 2011. [Google Scholar]
- Rohling, H.; Moller, C. Radar Waveform for Automotive Radar Systems and Applications. In Proceedings of the 2008 IEEE Radar Conference, Rome, Italy, 26–28 May 2008; pp. 1–4. [Google Scholar]
- Saponara, S.; Neri, B. Radar Sensor Signal Acquisition and Multidimensional FFT Processing for Surveillance Applications in Transport Systems. IEEE Trans. Instrum. Meas. 2017, 66, 604–615. [Google Scholar] [CrossRef]
- Choi, J.; Park, J.; Yeom, D. High Angular Resolution Estimation Methods for Vehicle FMCW Radar. In Proceedings of the 2011 IEEE CIE International Conference on Radar, Chengdu, China, 24–27 October 2011. [Google Scholar]
- Su, L.; Wu, H.S.; Tzuang, C.K.C. 2D FFT and Time-Frequency Analysis Techniques for Multi-Target Recognition of FMCW radar Signal. In Proceedings of the Asia-Pacific Microwave Conference 2011, Melbourne, Australia, 5–8 December 2011. [Google Scholar]
- Dudek, M.; Nasr, I.; Bozsik, G.; Hamouda, M.; Kissinger, D.; Fischer, G. System Analysis of a Phased-Array Radar Applying Adaptive Beam-Control for Future Automotive Safety Applications. IEEE Trans. Veh. Technol. 2015, 64, 34–47. [Google Scholar] [CrossRef]
- Kim, S.; Oh, D.; Lee, J. Joint DFT-ESPRIT Estimation for TOA and DOA in Vehicle FMCW Radars. IEEE Antennas Wirel. Propag. Lett. 2015, 14, 1710–1713. [Google Scholar] [CrossRef]
- Lin, J.-J.; Li, Y.-P.; Hsu, W.-C.; Lee, T.-S. Design of an FMCW radar baseband signal processing system for automotive application. SpringerPlus 2016, 5, 42. [Google Scholar] [CrossRef] [PubMed]
- Hyun, E.; Jin, Y.-S.; Lee, J. Design and Implementation of 24 GHz Multichannel FMCW Surveillance Radar with a Software-Reconfigurable Baseband. J. Sens. 2017, 2017, 3148237. [Google Scholar] [CrossRef]
- Jin, Y.; Kim, B.; Kim, S.; Lee, J. Design and Implementation of FMCW Surveillance Radar Based on Dual Chirps. Elektron. Elektrotechnika 2018, 24, 60–66. [Google Scholar] [CrossRef]
- Hyun, E.; Jin, Y.-S.; Ju, Y.; Lee, J.-H. Development of Short-Range Ground Surveillance Radar for Moving Target Detection. In Proceedings of the 2015 IEEE 5th Asia-Pacific Conference on Synthetic Aperture Radar (APSAR ‘15), Singapore, 1–4 September 2015; pp. 692–695. [Google Scholar]
- Kim, B.; Jin, Y.-S.; Kim, S.; Lee, J. A Low-Complexity FMCW Surveillance Radar Algorithm Using Two Random Beat Signals. Sensors 2019, 19, 608. [Google Scholar] [CrossRef]
- Lischi, S.; Massini, R.; Musetti, L.; Staglianò, D.; Berizzi, F.; Neri, B.; Saponara, S. Low Cost FMCW Radar Design and Implementation for Harbour Surveillance Applications. In Applications in Electronics Pervading Industry, Environment and Society; Springer: New York, NY, USA, 2015; pp. 139–144. [Google Scholar]
- Brennan, P.V.; Huang, Y.; Ash, M.; Chetty, K. Determination of Sweep Linearity Requirements in FMCW Radar Systems Based on Simple Voltage-Controlled Oscillator Sources. IEEE Trans. Aerosp. Electron. Syst. 2011, 47, 1594–1604. [Google Scholar] [CrossRef]
- Jeffery, T.W. Phased-Array Radar Design: Application of Radar Fundamentals; Scitech Publishing: Raleigh, NC, USA, 2009. [Google Scholar]
- Choi, B.; Oh, D.; Kim, S.; Chong, J.-W.; Li, Y.-C. Long-Range Drone Detection of 24 G FMCW Radar with E-plane Sectoral Horn Array. Sensors 2018, 18, 4171. [Google Scholar] [CrossRef] [PubMed]
- Stone, L.D.; Barlow, C.A.; Corwin, T.L. Bayesian Multiple Target Tracking; Artech House: London, UK, 1999. [Google Scholar]
- Hyun, E.; Lee, J.-H. Multi-Target Tracking Scheme Using a Track Management Table for Automotive Radar Systems. In Proceedings of the 2016 17th International Radar Symposium (IRS), Krakow, Poland, 10–12 May 2016; pp. 1–5. [Google Scholar]
- Kim, D.-B.; Hong, S.-M. Multiple-target tracking and track management for an FMCW radar network. EURASIP J. Adv. Signal Process. 2013, 159. [Google Scholar] [CrossRef]
- Skolnik, M. Radar Handbook, 2nd ed.; McGraw-Hill: New York, NY, USA, 1990. [Google Scholar]
- Skolnik, M. Introduction to Radar Systems, 3rd ed.; McGraw-Hill: New York, NY, USA, 2001. [Google Scholar]
- Tang, T.; Wu, C. Design of New FMCW Target Tracking Radar with Digital Beamforming Tracking; DRDC Scientific Report; DRDC-RDDC-2019-R175; Defence Research and Development Canada: Ottawa, ON, Canada, 2019.
- Tang, T.; Wu, C.; Elangage, J. Analyze the FMCW Waveform Skin Return of Moving Objects in the Presence of Stationary Hidden Objects Using Numerical Models. Electronics 2021, 10, 28. [Google Scholar] [CrossRef]
- Miller, R. Fundamentals of Radar Signal Processing; McGraw-Hill: New York, NY, USA, 2005. [Google Scholar]
- Finn, H.M.; Johnson, R.S. Adaptive Detection Mode with Threshold Control as a Function of Spatially Sampled Clutter-level. Estim. RCA Rev. 1968, 29, 141–464. [Google Scholar]
- Rhodes, D.R. Introduction to Monopulse; McGraw-Hill: New York, NY, USA, 1959. [Google Scholar]
- Shernman, S.M.; Barton, D.K. Monopulse Principles and Techniques, 2nd ed.; Artech House: London, UK, 2011. [Google Scholar]
- Ash, M.; Ritchie, M.; Chetty, K. On the Application of Digital Moving Target Indication Techniques to Short-Range FMCW Radar Data. IEEE Sens. J. 2018, 18, 4167–4175. [Google Scholar] [CrossRef]
- Salous, S.; Musal, M.; Moorhead, M. A staggered waveform HF frequency modulated radar simulation. In Proceedings of the IEEE National Conference on Antennas and Propagation, York, UK, 31 March–1 April 1999; pp. 108–111. [Google Scholar] [CrossRef]
- Prinsen, P.J.A. A class of high-pass digital MTI filters with nonuniform PRF. Proc. IEEE 1973, 61, 1147–1148. [Google Scholar] [CrossRef]
- Vergara-Dominguez, L. Analysis of the digital MTI filter with random PRI. In IEE Proceedings F (Radar and Signal Processing); IET Digital Library, 1993; Volume 140, pp. 129–137. Available online: https://digital-library.theiet.org/content/journals/10.1049/ip-f-2.1993.0018 (accessed on 22 January 2020).
- Ispir, M.; Candan, C. On the Design of Staggered Moving Target Indicator Filters. IET Radar Sonar Navig. 2016, 10, 205–215. [Google Scholar] [CrossRef]
- Doerry, A.W. Radar Doppler Processing with Nonuniform PRF. In Proceedings of the SPIE 10633, Radar Sensor Technology XXII, Orlando, FL, USA, 4 May 2018; p. 1063319. [Google Scholar] [CrossRef]
- Jin, F.; Cao, S. Automotive Radar Interference Mitigation Using Adaptive Noise Canceller. IEEE Trans. Veh. Technol. 2019, 68, 3747–3754. [Google Scholar] [CrossRef]
- Pan, M.; Chen, B.; Yang, M. A General Range-Velocity Processing Scheme for Discontinuous Spectrum FMCW Signal in HFSWR Applications. Int. J. Antennas Propag. 2016, 2016, 2609873. [Google Scholar] [CrossRef]
- Hinz, O.; Fickenscher, T.; Gupta, A.; Holters, M.; Zölzer, U. Evaluation of time-staggered MIMO FMCW in HFSWR. In Proceedings of the 12th International Radar Symposium (IRS), Leipzig, Germany, 7–9 September 2011; pp. 709–713. [Google Scholar]
- Shen, S.; Nie, X.; Tang, L.; Bai, Y.; Zhang, X.; Li, L.; Ben, D. An Improved Coherent Integration Method for Wideband Radar Based on Two-Dimensional Frequency Correction. Electronics 2020, 9, 840. [Google Scholar] [CrossRef]
- FIR Halfband Filter Design; Mathworks Inc.: Natick, MA, USA, 2020; Available online: https://www.mathworks.com/help/dsp/ug/fir-halfband-filter-design.htmlhttps://www.mathworks.com/help/hdlverifier/ug/fpga-in-the-loop-fil-simulation.html (accessed on 22 January 2020).
- FPGA-in-the-Loop Simulation; Mathworks Inc.: Natick, MA, USA, 2020; Available online: https://www.mathworks.com/help/hdlverifier/ug/fpga-in-the-loop-fil-simulation.html (accessed on 22 January 2020).
- Shaghaghi, M.; Adve, R.S.; Ding, Z. Resource Management for Multifunction Multichannel Cognitive Radars. In Proceedings of the 2019 53rd Asilomar Conference on Signals, Systems, and Computers, Pacific Grove, CA, USA, 3–6 November 2019; pp. 1550–1554. [Google Scholar] [CrossRef]
- Ding, Z.; Moo, P. Non-Adaptive and Adaptive Beam Scheduling Techniques for Phased Array Radar; DRDC Scientific Report; DRDC-RDDC-2016-R214; Defence Research and Development Canada: Ottawa, ON, Canada, 2016.




















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Notation | Definition |
|---|---|
| The carrier frequency. No frequency hopping assumed. | |
| The upbeat time duration. | |
| The downbeat time duration. | |
| The phase 0 duration of the TPS triangular FMCW waveform. | |
| The phase 1 duration of the TPS triangular FMCW waveform. | |
| The constant upbeat chirp rate. | |
| The constant downbeat chirp rate. |
| Variable Name. | Value | Definition |
|---|---|---|
| Number of TX antenna elements on the x axis. | ||
| Number of TX antenna elements on the z axis. | ||
| Number of RX antenna elements on the x axis. | ||
| Number of RX antenna elements on the z axis | ||
| The distance between the transmitter and the receiver phase reference centers. | ||
| Phases of the channel of the target skin return, and is the uniform random number generator. | ||
| The initial azimuth angle of the moving target. | ||
| The initial value of the azimuth tracking angle. | ||
| The initial elevation angle of the moving target. | ||
| The initial value of the elevation tracking angle. | ||
| The initial distance between the radar receiver and the target. | ||
| The initial range parameter for the tracking radar initialization | ||
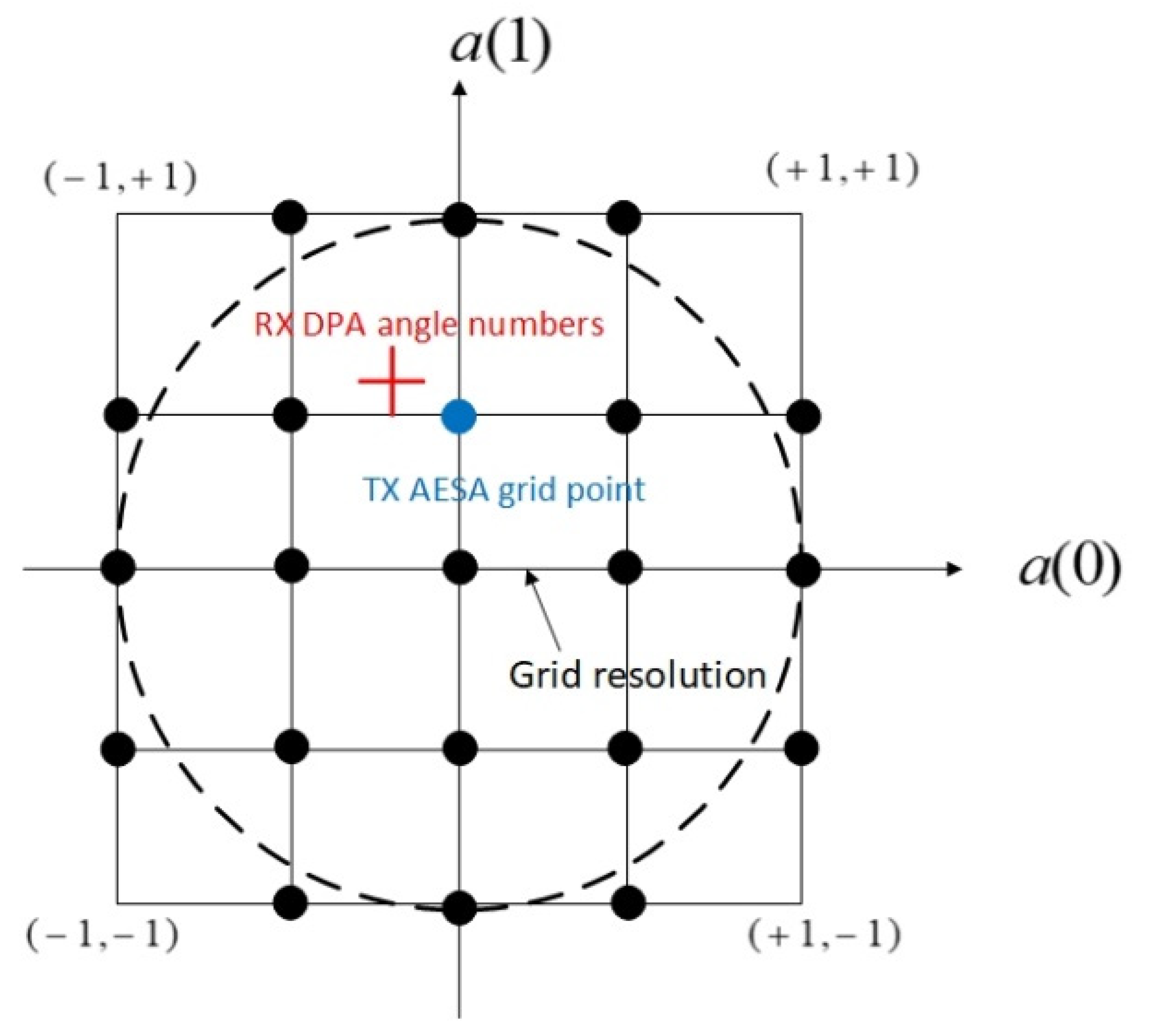
| The initial a(0) for the tracking radar initialization | ||
| The initial a(1) for the tracking radar initialization | ||
| variable | The initial Doppler parameter for the tracking radar initialization | |
| σ0 | Initial RCS of the target. | |
| Phases of the channel of the clutter skin return. | ||
| The azimuth angle of the clutter. | ||
| The elevation angle of the clutter. | ||
| The distance between the radar receiver and the clutter. | ||
| RCS of the clutter. | ||
| The carrier frequency of the radar. | ||
| The baseband sampling rate. | ||
| The FMCW radar bandwidth. | ||
| Oversampling rate. | ||
| Initial target velocities towards the radar on x, y, z axes when the velocities are positive. Negative velocities show that the target moves away from the radar. | ||
| accel | [0,0,0,] m/s2 | Velocity acceleration of the target towards the radar on x, y, z axes. |
| The waveform period. | ||
| The phase 0 duration. | ||
| The phase 1 duration. | ||
| The upbeat duration. | ||
| The downbeat duration. | ||
| The upbeat chirp rate. | ||
| The downbeat chirp rate. | ||
| 3894 | The number of samples in phase 0 at sampling rate. | |
| The number of samples in phase 1 at sampling rate. | ||
| The number of samples in the upbeat at sampling rate. | ||
| The number of samples in the downbeat at sampling rate. | ||
| The TX antenna gain for the target of each TX antenna element. | ||
| The TX antenna gain for the clutter of each TX antenna element. | ||
| The RX antenna gain for the target of each RX antenna element. | ||
| The RX antenna gain for the clutter of each RX antenna element. | ||
| The ratio of antenna spacing and wavelength. | ||
| The transmit power of each TX antenna element. | ||
| The noise floor at temperature and including the noise figure of 8 | ||
| Half-band filter order after TX up-sampling and before each DAC at the transmitter. | ||
| Half-band filter order before RX down-sampling and after each ADC at the receiver. | ||
| Lagrange filter order in the oversampling domain. | ||
| TX to RX leakage power between each TX antenna and each RX antenna. We assume that the isolation between each TX antenna and each RX antenna is dB. | ||
| Number of FFT points. | ||
| Range IIR smoothing filter order, the filter response looks like , where -transform is with respect to the sampling rate of . | ||
| The Doppler estimation module accumulator/PI controller gain 0. | ||
| The Doppler estimation module accumulator/PI controller gain 1. | ||
| The number of coherently added signals in the slow time integration module. | ||
| The number of uniform quantization steps for the range for the AESA angle number quantization grid. |
| Item | Value |
|---|---|
| (range) | |
| (the normalized Doppler value) | () |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Tang, T.; Wu, C.; Elangage, J. A Signal Processing Algorithm of Two-Phase Staggered PRI and Slow Time Signal Integration for MTI Triangular FMCW Multi-Target Tracking Radars. Sensors 2021, 21, 2296. https://doi.org/10.3390/s21072296
Tang T, Wu C, Elangage J. A Signal Processing Algorithm of Two-Phase Staggered PRI and Slow Time Signal Integration for MTI Triangular FMCW Multi-Target Tracking Radars. Sensors. 2021; 21(7):2296. https://doi.org/10.3390/s21072296
Chicago/Turabian StyleTang, Taiwen, Chen Wu, and Janaka Elangage. 2021. "A Signal Processing Algorithm of Two-Phase Staggered PRI and Slow Time Signal Integration for MTI Triangular FMCW Multi-Target Tracking Radars" Sensors 21, no. 7: 2296. https://doi.org/10.3390/s21072296
APA StyleTang, T., Wu, C., & Elangage, J. (2021). A Signal Processing Algorithm of Two-Phase Staggered PRI and Slow Time Signal Integration for MTI Triangular FMCW Multi-Target Tracking Radars. Sensors, 21(7), 2296. https://doi.org/10.3390/s21072296