1. Introduction
With the rapid development of remote-sensing technology, China’s satellite remote-sensing technology can realize global and multisatellite network observations, thereby enabling comprehensive global observation with three-dimensional and high-, medium-, and low-resolution imaging, which has gradually penetrated all aspects of the national economy, social life, and national security [
1]. Radiometric calibration is the process of establishing the functional response relationship between the absolute value of the radiance at the entrance pupil of the remote sensor and the digital number of the output image of the remote sensor and determining the radiometric calibration coefficient of the remote sensor data [
2,
3]. With the development of global remote-sensing quantitative applications, it has become increasingly urgent to improve the level of quantitation in remote-sensing applications of satellite data. On-orbit radiometric calibration and modulation transfer function (MTF) detection by satellite remote sensors are the basis of satellite remote-sensing quantitative applications. Therefore, higher requirements are put forward for the accuracy of remote sensor radiometric calibration and MTF detection [
4,
5,
6,
7]. Vicarious calibration, which is not affected by the space environment or satellite state, can account for atmospheric transmission and environmental impacts. This approach, which can help facilitate authenticity and model accuracy tests of on-orbit remote sensors, has been developed rapidly [
8]. As a kind of high-spatial resolution satellite site for vicarious calibration equipment, point light sources are light-weight and small and exhibit excellent optical characteristics. Their layout is flexible, and they can be moved easily. The aperture of the convex mirror depends on the pointing accuracy of the system. To ensure reliability, it is desirable to increase the pointing accuracy, reduce the aperture size, and reduce the volume and weight of the point light source. Furthermore, it is desirable to change the number of mirrors to realize on-orbit radiometric calibration and MTF detection of point light sources with different energy levels [
9,
10]. Point light source radiometric calibration mainly uses the point light source equipment to reflect sunlight into the entrance pupil of the satellite. Upon calculating the equivalent entrance pupil radiance of the satellite combined with the target response value of the remote-sensing image, the calibration coefficient is calculated according to the remote sensor calibration equation. Because this procedure simplifies the radiative transfer process, it has been widely used [
11,
12,
13,
14,
15].
According to literature research, so far, few countries have carried out on-orbit radiation calibration and MTF detection of point light sources. The United States was the first to carry out this work, followed by France and China. France has adopted active point light source equipment, mainly using high-energy spotlight for on-orbit MTF detection of SPOT5 [
16]. The United States and China mainly use reflective point light source equipment to carry out the corresponding experiments [
17,
18,
19,
20,
21,
22,
23]. The key to high-resolution satellite on-orbit radiation calibration based on point light sources is to control the direction of the central optical axis of the point light source reflector. When the central optical axis of the reflector points to the sun, the sunlight enters the convex mirror perpendicularly, the reflected light spot is in a divergent state, and the direction points toward the sun. When the central optical axis of the reflector points toward the position of the bisector of the angle between the satellite and the sun, the reflected light spot is reflected toward the satellite direction in a divergent state. If the pointing position of the optical axis at the edge is reflected toward the direction of the satellite due to low pointing accuracy, the satellite may not observe the point light source or may observe only part of the reflected light spot, which may cause the radiation calibration to fail. Therefore, the success or failure of the point light source on-orbit experiment depends on the pointing accuracy, and the pointing accuracy depends on the tracking accuracy of the system. To improve the pointing accuracy of the system, it is necessary to improve the tracking accuracy of the system. The pointing accuracy of the reflector equipment used by American researchers Schiller et al. [
24] to implement the SPARC method (specular array radiometric calibration) of radiation calibration is better than ± 0.5°. In particular, a large convex mirror is used to compensate for the lack of pointing accuracy to ensure that the reflection spot enters the pupil of the satellite. However, the processing accuracy of large convex mirrors is difficult to ensure, and this approach is not convenient for engineering practice and application promotion. In China, the Anhui Institute of Optics and Fine Mechanics, Chinese Academy of Sciences, successively conducted on-orbit radiometric calibration experiments and MTF detection based on point light sources [
7,
12,
13,
22]. Initially, a large plane mirror was used as the reflection point light source to perform experiments involving medium- and high-orbit satellites on orbit [
22,
23]. At present, we mainly carry out on-orbit experiments of point light sources based on convex mirrors. Compared with existing foreign point light source systems, the difference is that we use a smaller convex mirror to overcome the disadvantages associated with larger convex mirrors. The advantage of this approach is that it is easy to change the number of mirrors to produce different energy levels of reflected light, which is suitable for different resolutions in satellite radiometric calibration and MTF detection [
13]. However, the disadvantage is that the reflection spot decreases due to the reduction of the aperture of the convex mirror, which increases the difficulty of the satellite reliably receiving the reflected spot. Therefore, to ensure that the reflected light spot is reliably incident on the entrance pupil of the satellite, the key technological improvement that needs to be addressed when using a smaller convex mirror is improving the pointing accuracy. Therefore, to improve the pointing accuracy of the system, a high-precision calibration modeling method for a point light turntable based on a solar vector was established [
9]. Compared with previous-generation equipment [
22], the integrated pointing accuracy of the system could be enhanced; however, a camera with an automatic observation ability was not introduced in the modeling process. Consequently, the system cannot realize automatic calibration, and it is difficult to realize the high-precision calibration of large-scale automatic cooperative work. To realize automatic calibration, the literature [
10] proposed a mirror normal calibration method based on the centroid of the solar image; however, in the initial stage of the model, the influencing factors such as equipment placement errors and camera distortion corrections are not considered. Consequently, the calibration accuracy is affected by single-point calibration and the solar image, and the calibration accuracy needs to be further increased.
The abovementioned calibration techniques based on convex mirrors can achieve satisfactory results in radiometric calibration and MTF detection; however, such approaches cannot meet the requirements of high precision, high frequency and use of existing high-resolution satellites. Nevertheless, unattended multipoint automatic and high-precision pointing adjustment technology can satisfy these requirements. Therefore, in this study, based on the development of a point light source turntable tracking system, an automatic calibration modeling method is developed. Moreover, a high-precision automatic geometric calibration model is established. The system can realize network-based remote control, achieve high-precision pointing of the point light source array tracking system, and realize high-frequency and high-efficiency orbit radiation calibration and MTF detection of high-spatial resolution satellites.
The tracking accuracy described in this paper is the basic guaranteed accuracy required to achieve a comprehensive system design accuracy better than 0.1°; therefore, the design accuracy of our system needs to be better than 0.1°. To realize automatic calibration of the point light source array and achieve the purpose of high-precision tracking of the point light source system, this paper focuses on the establishment of a high-precision calibration model of the point light source system. Starting from the composition of the point light source system, the establishment of a coordinate system and the principle of geometric calibration modeling, this paper studies the establishment of a simplified calibration model of the point light source system. On the basis of the simplified calibration model, considering the geometric error parameters and camera lens distortion parameters that affect the tracking accuracy of the system, the automatic high-precision geometric calibration model is further established. Based on the theoretical verification and solution of the model, the inverse solution algorithm of the calibration model is proposed for experimental verification of the calibrated model. Finally, the experimental verification and system tracking accuracy analysis are carried out.
3. Geometric Calibration Modeling of the Turntable
3.1. Basic Calibration Model of the Turntable
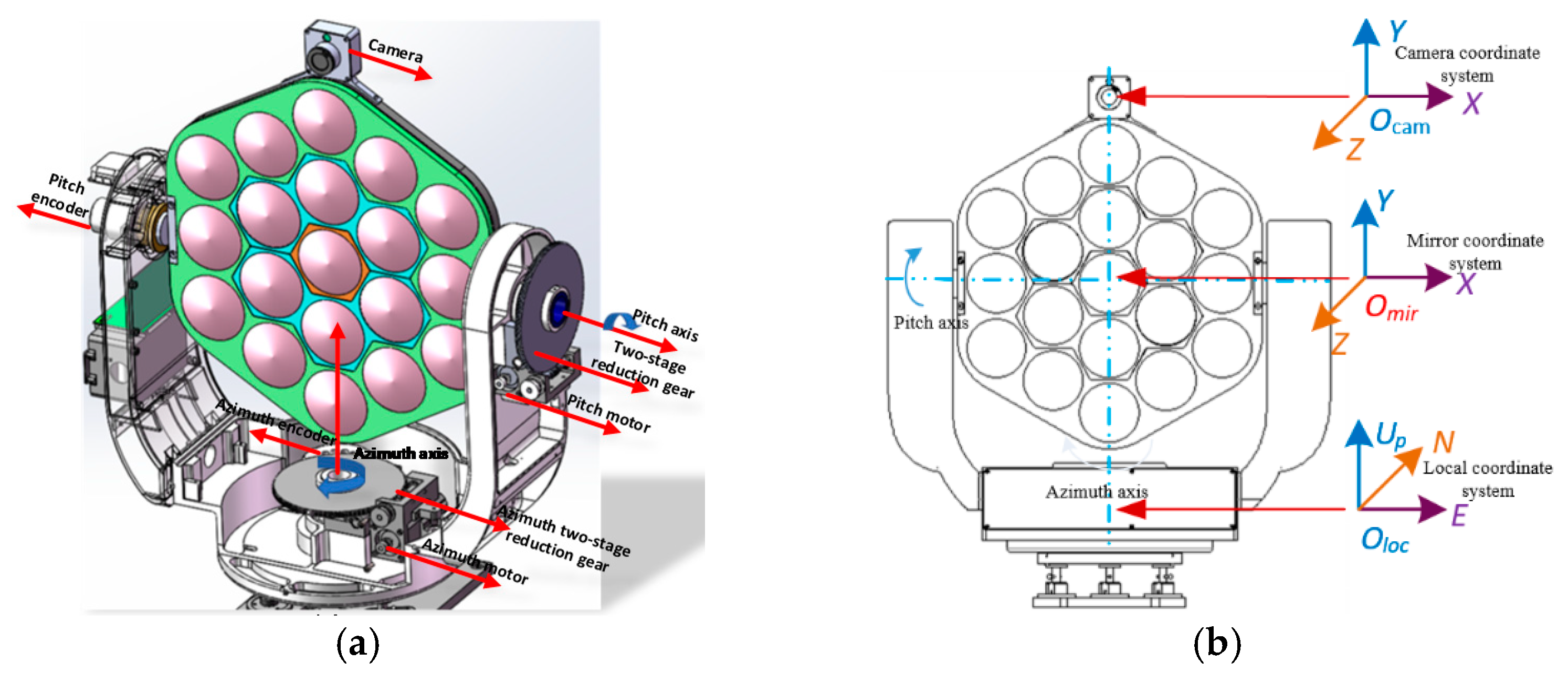
In terms of the initial position of the point light source in the basic calibration model of the turntable, the
X- and
Z-axes in the mirror coordinate system coincide with the
E- and
N-axes in the local coordinate system, respectively. The central optical axis of the reflector points true north. The camera is affixed to the mirror assembly bracket, and the definition of its coordinate system is consistent with the mirror coordinate system. Therefore, the central optical axis vector of the reflector is replaced by the camera center optical axis vector. When the camera coordinate system is transformed to the local coordinate system, the relationship between the two coordinate systems must be established by multiplying the left side by the rotation matrix
, as follows:
By combining Equations (3) and (4), the relationship between the camera and local coordinate systems can be established as
where
and are the azimuth and pitch encoder values corresponding to the encoder at a certain moment, respectively; and are the coordinates of the centroid of the solar image in the pixel coordinate system at a certain moment; and is the imaging scale factor. Moreover, and are the camera main point coordinates, and represents the camera imaging time serial number or the solar position serial number at different times, with .
We define
. Consequently, Equation (5) can be rewritten as
where
,
represents the east (
E) component of the sun in the local coordinate system,
represents the component of the sun due north (
N) in the local coordinate system, and
represents the upward (
) component of the sun perpendicular to the earth plane in the local coordinate system.
Equation (6) represents the rotation transformation relationship between the image plane in the image space coordinate system and object plane in the local coordinate system. By dividing the first and second expressions of Equation (6) by the third expression,
and
, where
is the pixel size and
is the number of pixels. Upon substituting this content into Equation (6), the basic calibration model of the turntable can be expressed as
The right and left sides of the equation represent the calculation formula of the solar vector and optical axis vector of the turntable mirror center, respectively. When and , the optical axis vector of the reflector points toward the sun. In this case, and . When and , the optical axis vector of the reflector points toward a certain angle in space. In this case, and .
In this manner, the relationship between the camera coordinate system and local coordinate system can be established by using the camera to observe the solar vector. Thus, any vector in the image space coordinate system can be transformed to the local coordinate system through the coordinate rotation transformation relationship. The solar vector observed by the camera represents the optical axis vector of the reflector. The control turntable uses the camera to realize data acquisition and automatic calibration in the local coordinate system.
3.2. High-Precision Geometric Calibration Model of the Turntable
The basic calibration model of the turntable is based on the assumption that the turntable is placed horizontally, the pitch axis is orthogonal to the azimuth axis, and the camera is positioned vertically. However, regardless of whether the actual turntable is horizontal, the pitch axis is vertical to the azimuth axis, and the camera is vertical. The levelness error, perpendicularity error, and camera placement perpendicularity error must be considered in the high-precision control system. In particular, to realize high-precision automatic calibration control of the turntable, it is necessary to establish a high-precision calibration model of the turntable and examine the geometric error parameters of the turntable obtained considering the basic calibration model. We consider that the error matrix of the turntable placement levelness is
, the orthogonal error matrix of the pitch and azimuth axes is
, and the vertical error matrix of the camera placement is
. In this case, the high-precision calibration model can be expressed as
where
,
, and
.
According to the rotation matrix, the same kind of rotation can be combined in the same direction. Equation (8) can be simplified to obtain a high-precision calibration model of the turntable as
where
,
, and
represent the rotation matrix around the
,
, and
axes from the mirror coordinate system to the local coordinate system, respectively;
,
, and
represent the rotation matrix around the
,
, and
axes from the pitch axis coordinate system to the azimuth axis coordinate system, respectively; and
,
, and
represent the rotation matrix around the
,
, and
axes from the camera coordinate system to the mirror coordinate system, respectively. Consequently,
where
and
represent the level offset error of the turntable installation,
represents the geometric error of the verticality of the pitch axis and azimuth axis of the turntable, and
represents the verticality offset error of the camera placement.
We define
. By inserting Equation (9), we obtain
Thus, a high-precision calibration model considering the geometric error of the system is established. However, in the process of automatic system calibration, camera lens distortion may produce errors, which may limit the increase in the calibration accuracy. Therefore, it is necessary to correct the lens distortion to further reduce the error sources. Considering the calibration model expressed in Equation (10), the chessboard calibration results are incorporated [
27], and the lens distortion correction term is added. The first term approximation of the Taylor series expansion is adopted to correct the radial distortion error of the lens
where
and
are the coordinates of the image centroid in the pixel coordinate system;
and
are the camera main point coordinates;
and
are the radial distortion errors of the camera;
and
are the focal lengths of the camera in the
and
directions, respectively; and
,
, and
.
According to the camera physical calibration model [
28,
29], the radial distortion error of the camera can be defined as follows:
where
,
, and
. Here,
is the radial distortion coefficient of the camera, and
is the radial distance of the actual image point.
Substituting Equation (12) into Equation (11) yields a high-precision geometric error calibration model with camera distortion correction, as follows:
Equation (13) represents the conversion of the solar vector in the local coordinate system to the representation in the image space coordinate system. Thus, the relationship between the solar vector observed by the camera in the image space coordinate system is established, and transformation from any vector in the image space system to the local coordinate system is realized. Finally, through actual camera observations, multipoint data are collected to establish multipoint observation equations to achieve high-precision calibration of the system installation geometric errors and verify the corresponding error parameters , , , and , encoder initial positions and , and camera principal point and principal distance values , , , and fy, among other factors. In this manner, high-precision calibration of the turntable system in the local coordinate system can be realized, leading to increased pointing accuracy.
5. Experimental Results and Analysis
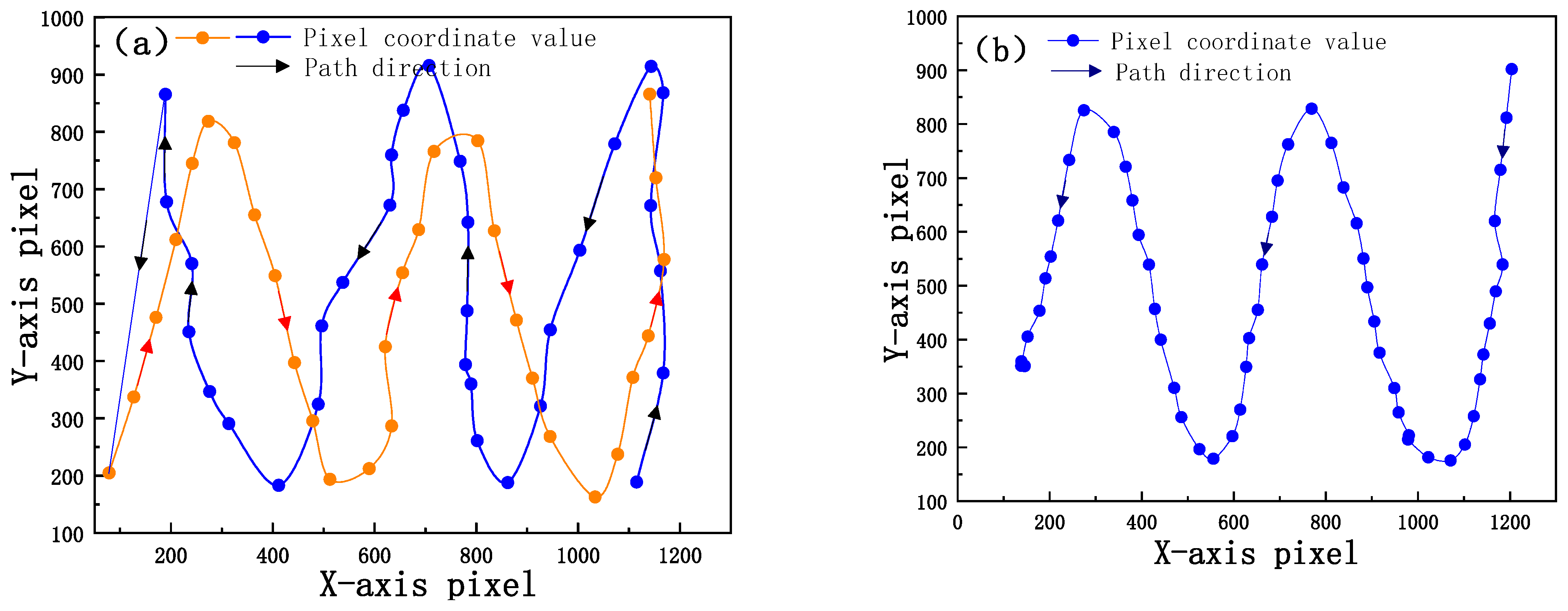
5.1. Reliability Analysis of Measured Data
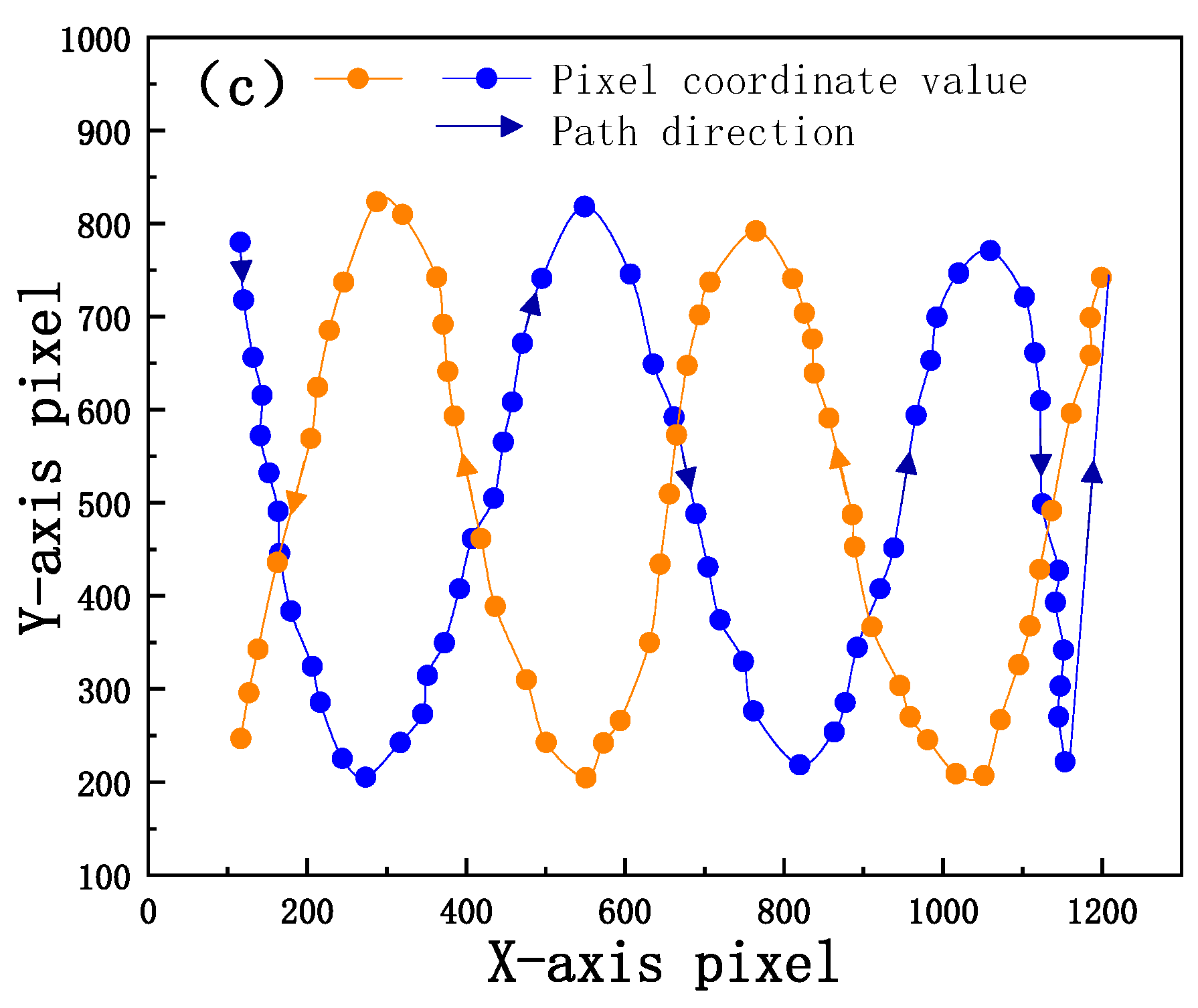
Before obtaining the experimental data, the equipment is placed at the initial position, and the central light axis direction of the reflector is initially determined to be due north. To accelerate the calibration progress, reduce the calibration time, and test the encoder’s large-scale and multiple-angle motion characteristics, solar images at different positions of the camera array are collected. These images are used to perform the calibration model calculation and provide basic data to ensure accurate calibration. Using three techniques, three groups of data are collected to analyze the universality of the model solution. For the first group, the system moves from the right end to the left and collects two relatively irregular sets of pixel coordinate point data spread over the image plane of the detector. For the second group, the system moves from the right end to the left and collects a group of pixel coordinate points evenly distributed in the image plane of the detector. For the third group, the system moves from the left end to the right and collects a group of pixel coordinate points that are evenly distributed in the image plane of the detector. Moreover, the corresponding pitch, azimuth encoder readings and solar position parameters are recorded. The data acquisition path is shown in
Figure 4.
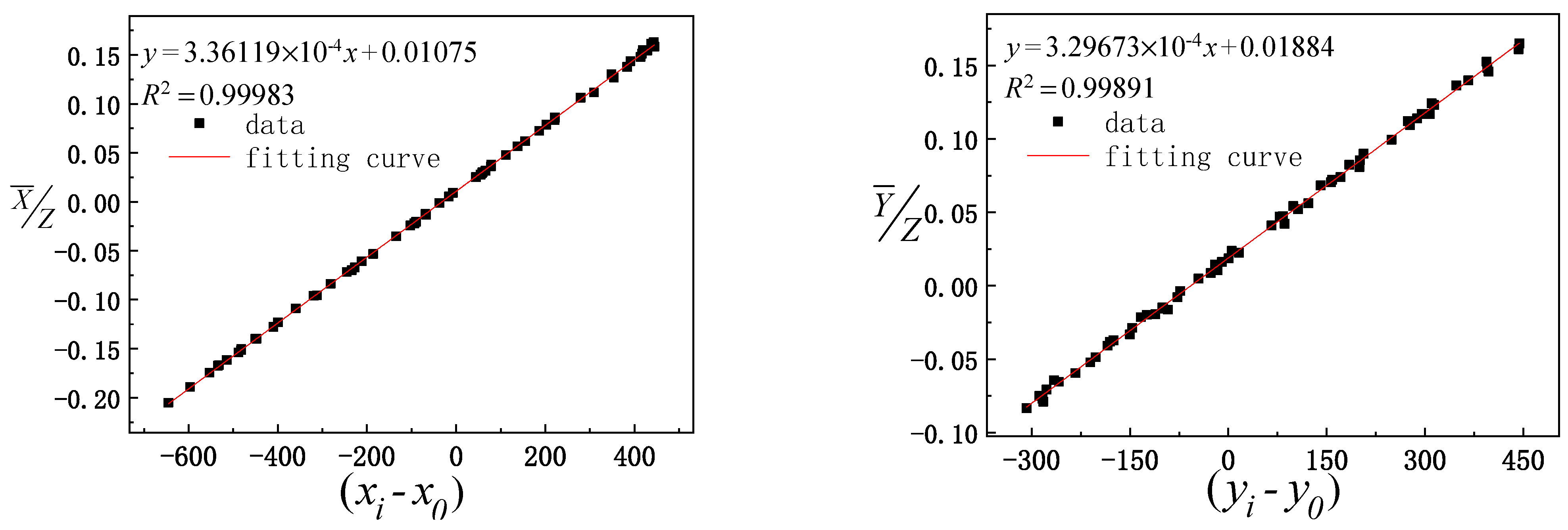
Before the model is solved, the reliability of the experimental data is analyzed. The geometric parameters
,
,
ω0, and
to be calibrated are set as 0, the calculated solar vector value of the three groups of data is considered the ordinate, the actual observation value of the optical axis vector of the mirror center is considered the abscissa for fitting analysis, and the calculated value of the solar vector is compared with the actual observation value. The comparison results are shown in
Figure 5,
Figure 6 and
Figure 7, where
and
represent the actual solar vector pitch and azimuth components observed by the camera, respectively.
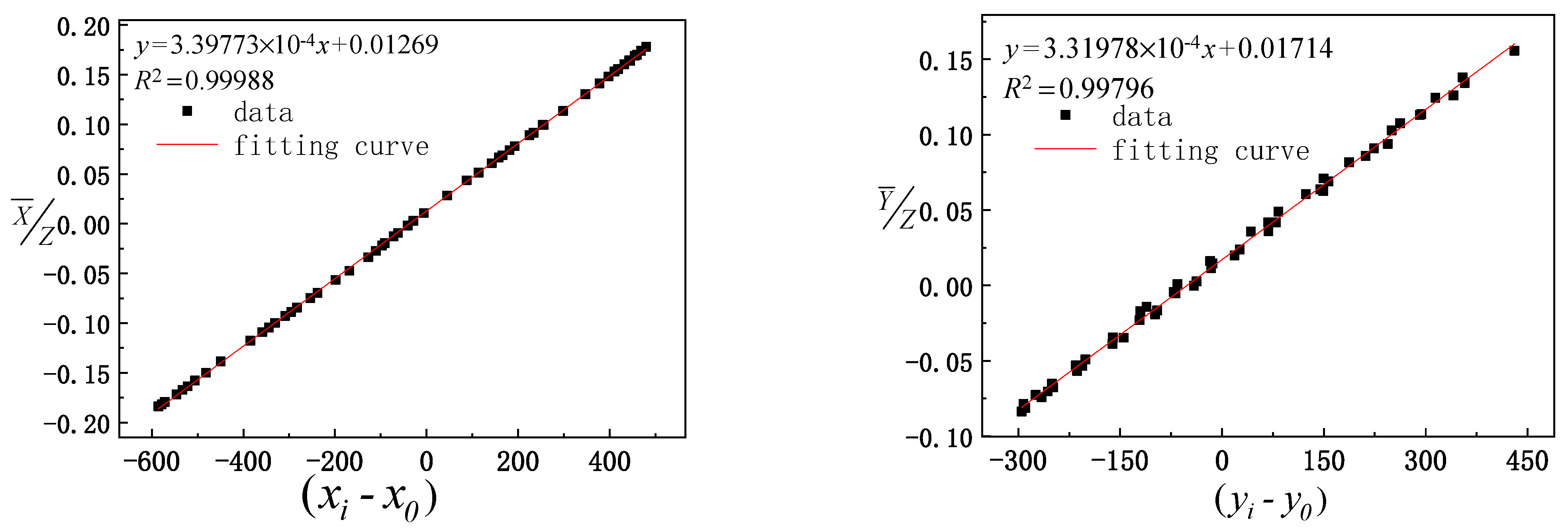
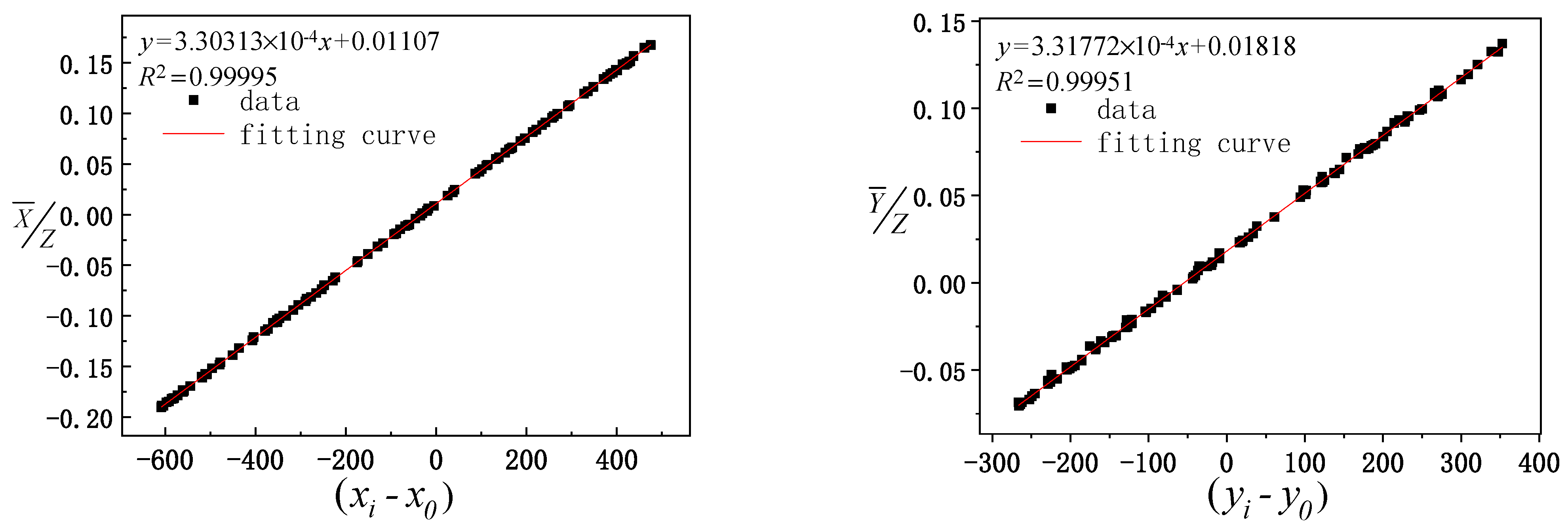
It can be seen from
Figure 5,
Figure 6 and
Figure 7 that the data fitting results for the three groups of different paths indicate that the linear fitting correlation coefficient values between the calculated value of the solar vector and optical axis vector value of the mirror center observed by the camera are greater than 0.99. The linear fitting results are ideal, which further verifies the reliability of the experimental data and provides reliable basic data to solve the model.
5.2. Model Calculation and Theoretical Verification
The verified data solution model is used. The data of the model are shown in
Table 1. Only 8 sets of data are listed in the table. The first row indicates the time of data collection. The second row indicates the corresponding pitch and azimuth encoder readings when the solar image is located at a certain position of the camera array. The third row indicates the altitude and azimuth of the sun in the local coordinate system corresponding to the data acquisition time.
In total, 105 sets of data are extracted from 221 sets of data to calculate the calibration model parameters. When the initial values of , , and are [0 0 0 0 76 310] (unit:degree), [724 471 0.1063] pixels, and [15.6 mm 15.6 mm], respectively, the system parameters are [−0.1625 −0.178 0.10614 0.0345 77.19 310.49] (unit:degree), [719.03 470 −0.0009] pixels, and [15.614 mm 15.65 mm].
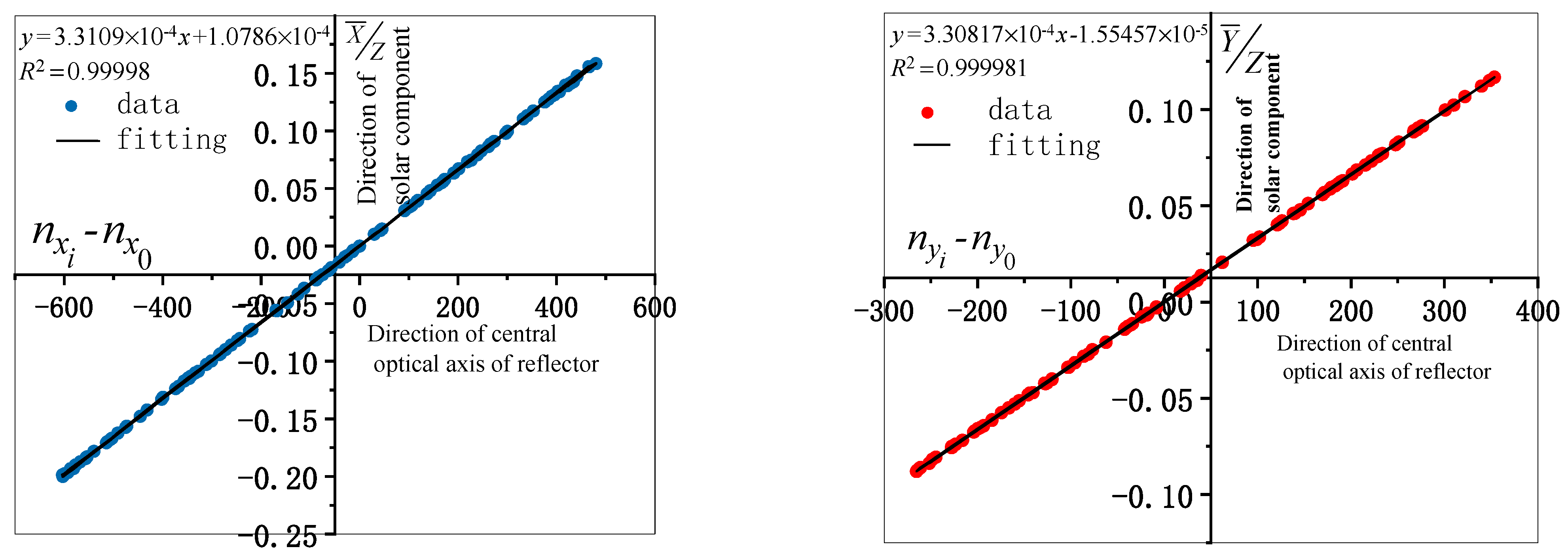
After the model is solved, it is necessary to evaluate the accuracy of the model parameters. First, the reliability of the results of the model is analyzed theoretically. The image centroid coordinates are used to represent the optical axis vector of the mirror as the X-axis, and the calculated solar vector value is considered the Y-axis in the fitting analysis. The linear fitting correlation coefficients of the two groups of values are considered to perform the reliability analysis of the evaluation model solution results. The fitting results of the two groups of data are shown in
Figure 8.
It can be seen from the fitting results in
Figure 8 that the image centroid coordinate represents the mirror normal direction consistent with the solar vector, and the fitting correlation coefficient
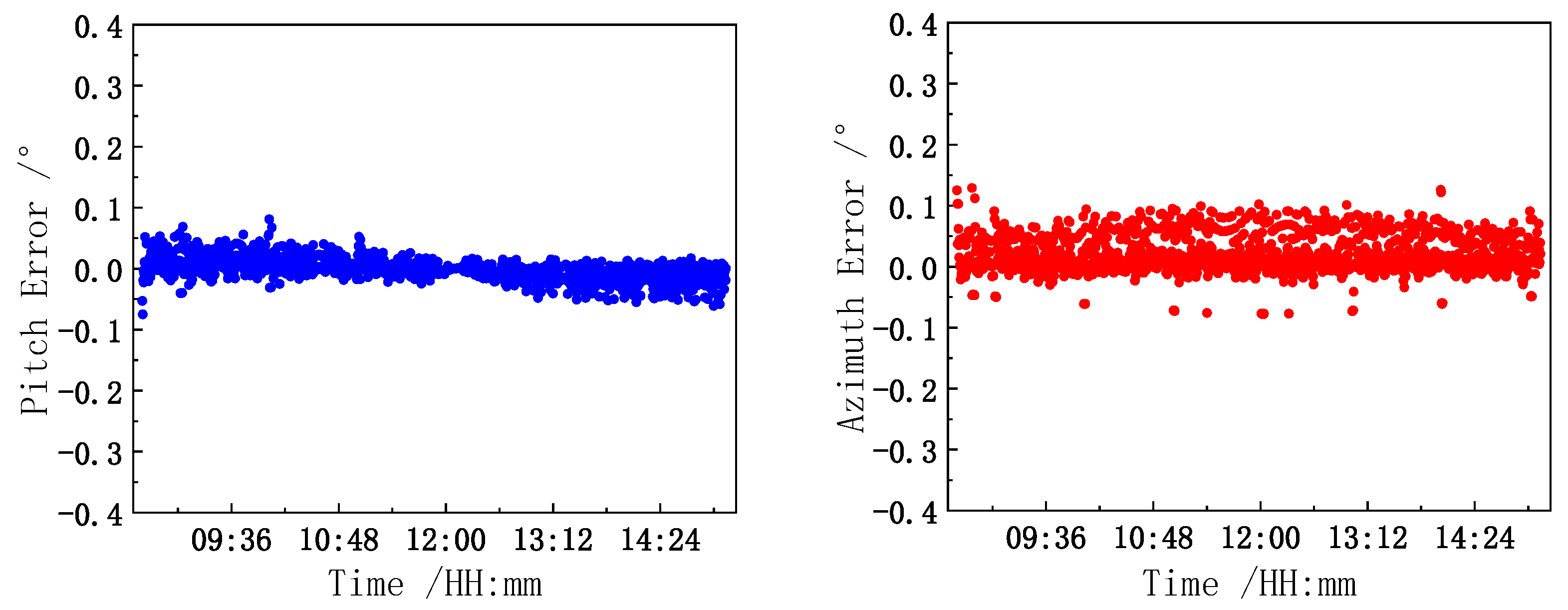
is greater than 0.99998, which indicates a high linear correlation. Therefore, the reliability of the model results can be analyzed considering the theoretical data. Second, we analyze the error of the system calculation model. The system error caused by multipoint data optimization is used to analyze the pixel difference caused by the camera observation and angle difference caused by the encoder elevation and azimuth. The pixel, pitch, and azimuth error distributions corresponding to the systematic error distribution generated by the solution model are shown in
Figure 9.
The error distribution data in
Figure 9 show that the pixel error corresponds to the system model solution error, and the pixel average error and standard deviation in the X-axis direction are 1.253 pixels and 1.014 pixels, respectively. The average error and standard deviation in the Y-axis direction are 0.61 pixels and 0.45 pixels, respectively. The average error and standard deviation of the azimuth axis are 0.024° and 0.019°, respectively. The average error and standard deviation in the pitch axis direction are 0.012° and 0.0085°, respectively. According to the standard deviation data, these results are within the allowable error range. Therefore, from the theoretical error data, the reliability of the calculation model results is further verified.
5.3. Model Experiment Verification
In this step, we further verify the accuracy of the model parameters. Through the experiment, using the model inverse solution algorithm after calibration, the corresponding encoder pitch and azimuth target positions corresponding to the sun at different times are inversely solved, and the motor is driven to the target position. Finally, the accuracy of the model is verified by the actual observation of the camera. Part of the test data of the validated model is shown in
Table 2, where only 8 sets of data are presented.
The first row in
Table 2 indicates the solar altitude and azimuth angles when the central light axis of the reflector is aligned with the sun at different times. The second row indicates the target positions of the pitch and azimuth encoders, as calculated with the model inverse solution algorithm after calibration. The third row indicates the actual position measurement values of the encoder. The device considers the data presented in the second row as the target position, rotates the motor to the target position, and uses the encoder to detect the actual position as the feedback signal to further ensure the motion control accuracy of the turntable. The fourth row of data is the difference between the third row of data and the second row of data, which represents the pitch and azimuth control deviation.
Figure 10 shows that the standard deviations of the pitch and azimuth angle control errors are 0.0176° and 0.0305°, respectively. The comparison and analysis of the pitch and azimuth encoder test data indicate that the model calculations are consistent with the measured values. The error range is approximately 0.04°, and the accuracy is better than 0.1°, which satisfies the verification requirements of the calibration model. The accuracy of the model is thus preliminarily verified by analyzing the motion control accuracy of the turntable and through actual observations by the solar observer.
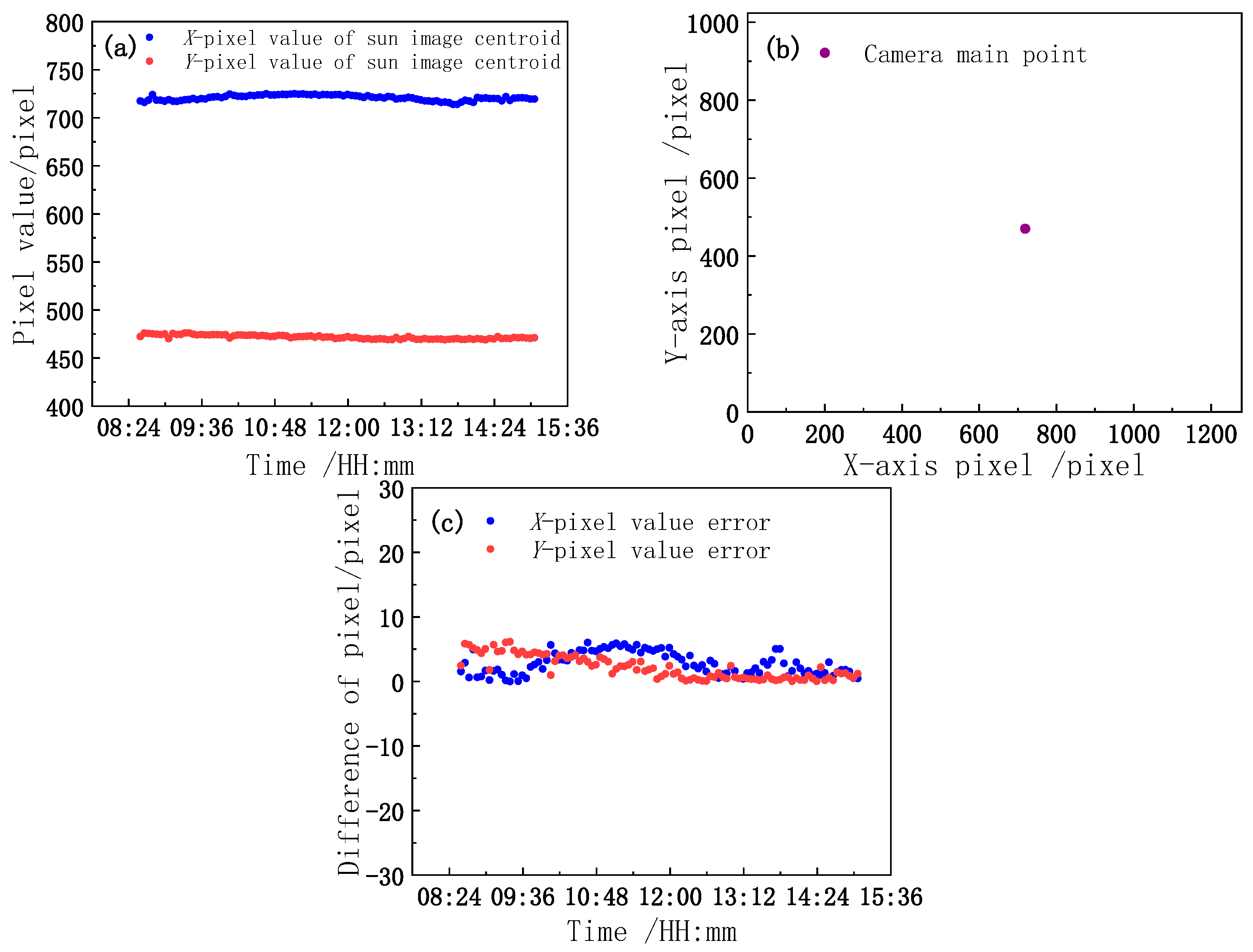
Through the inverse calibration model, the motor is driven and controlled, and the model is preliminarily verified. To further verify the accuracy of the model parameters, by considering the actual observation of the camera after calibration, the solar image is tracked and collected, and the centroid coordinates of the solar image are used for verification. The centroid coordinates of the solar image at different times are compared with the camera main point coordinates to reflect the deviation degree of the center light axis of the reflector pointing toward the sun. The root mean square error (RMSE) of the two groups of data is calculated by Equation (21) to quantitatively evaluate the correctness of the model solving parameters and the tracking control accuracy of the system.
Here,
and
are the RMSEs of the pitch and azimuth respectively;
and
are the coordinates of the principal point of the camera after calibration;
and
are the image centroid coordinates.
The centroid test data of the experimental verification model are presented in
Table 3, where only 8 sets of data are listed.
The first row in
Table 3 indicates the measured image centroid coordinates when the reflector centroid axis is aligned with the sun according to the target value of the inverse calibration model. The second row of data pertains to the use of a checkerboard to calibrate the camera’s main point coordinates. The third row shows the deviation between the measured image centroid and camera main point. The two sets of data and deviations are shown in
Figure 11.
According to the two sets of data in
Figure 9a,b, it can be determined by formula (21) that the RMSE values of the
X- and
Y-axis pixels are 2.0995 pixels and 0.8689 pixels, respectively, and the corresponding pixel angle resolution errors are 0.0377° and 0.0144°. The synthetic angular resolution error is calculated by formula (22) combined with the standard uncertainty formula [
30], and the synthetic angular resolution error is 0.0403°.
Here,
is the component of error uncertainty.
It can be determined from the above analysis data that a small deviation exists between the centroid coordinates of the solar image obtained by the actual observation of the camera as the observation value and the coordinates of the main point of the camera as the real value. Nevertheless, the two sets of data are consistent, which demonstrates the accuracy of the calibration model. At the same time, the tracking control accuracy of the system is also measured through the RMSE. Because the tracking accuracy of the system represents the normal pointing accuracy of the mirror, the tracking control accuracy of the system is also the pointing accuracy of the system.
5.4. Accuracy Analysis of System Tracking
Through the experimental verification and analysis of the calibration model, the accuracy of system tracking using the model is evaluated. The tracking accuracy of the system mainly includes the motion control accuracy, external image processing algorithm accuracy and calibration model calculation accuracy. The accuracy of the motion control pertains to the accuracy (0.0003°) of the solar position calculated with the astronomical algorithm [
31] and detection accuracy of the encoder (0.02°). The accuracy of the external image processing algorithm pertains to the accuracy of the image centroid extraction algorithm (0.032°) [
32,
33,
34,
35,
36], average reprojection error of the camera calibration (0.1299 pixels), interference of the solar image noise and accuracy of the calibration model calculation. The uncertainty sources affecting the tracking accuracy of the system are presented in
Table 4. The system tracking accuracy summarizes all the factors. The RMSE of the solar image obtained by the actual observation of the camera as the observation value and camera principal point coordinate as the real value is comprehensively evaluated as 0.0403°, and the tracking accuracy is noted to be better than 0.1°, which meets the requirements of the comprehensive pointing control accuracy of the system [
37,
38,
39,
40].
According to the data in
Table 4, the uncertainty of the system calibration is approximately 0.0403°. That is, the tracking control accuracy of the system is 0.0403°, which is greatly improved compared with the tracking accuracy of the tracking equipment in the solar photovoltaic industry and the tracking accuracy of foreign point light sources [
24,
41,
42,
43,
44,
45,
46]. This finding demonstrates the effectiveness of the calibration model in this paper.
Overall, the motion control error, encoder detection accuracy and image centroid extraction algorithm accuracy are the main error sources in the system control accuracy. Therefore, it is necessary to enhance the detection accuracy of the encoder, overcome the interference caused by the mechanical transmission error and unbalanced force in the motion processes, and optimize the image quality and image centroid extraction algorithm. Moreover, by enhancing the accuracy of the calibration camera and reducing the influence of the error caused by the model, the tracking accuracy of the system can be further increased to enhance the comprehensive pointing accuracy of the system and more effectively realize radiometric calibration and MTF detection of high-spatial resolution satellites.















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}