
Spatial Location in Integrated Circuits through Infrared Microscopy †

 ,
,  ,
,  ,
,
Abstract
1. Introduction
1.1. Industrial Context
1.2. Vision Context
- If the IC is tilted or deformed (even by a micron), then the focus may need to be readjusted at every point during the characterization.
- Re-targeting a structure induces imprecision because the human visual perception can vary significantly.
2. Scanning System for Viewing Integrated Circuits
2.1. Autofocus Methods
2.2. Specialized Autofocus for Viewing Integrated Circuits
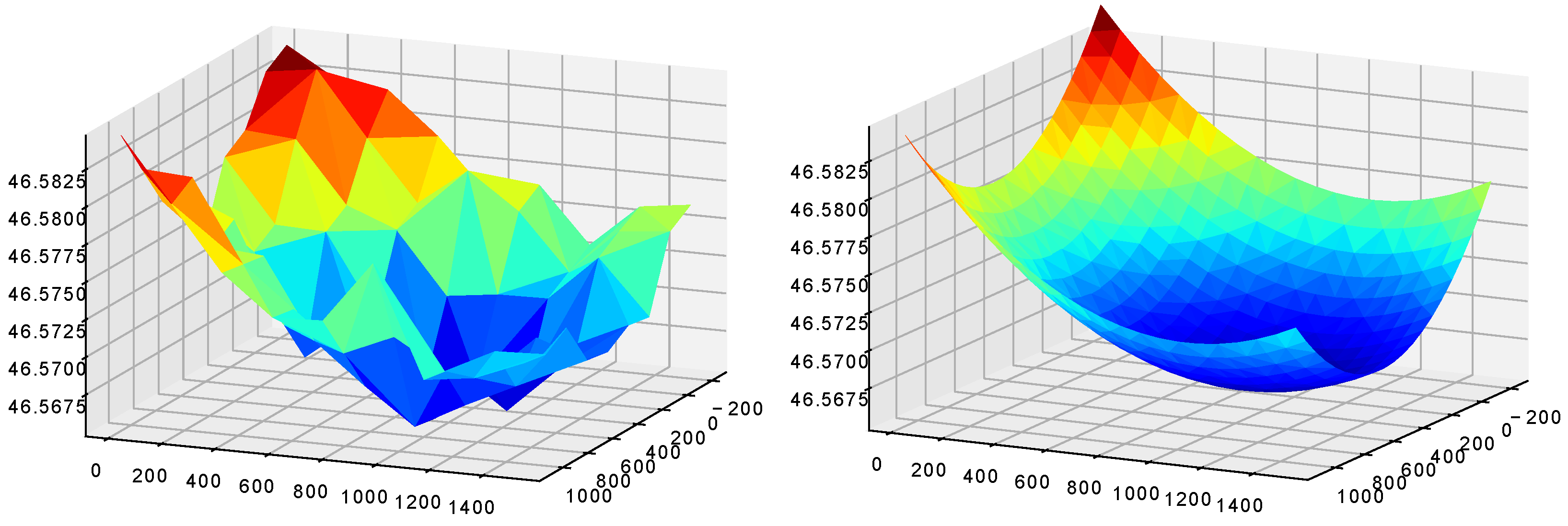
- Given a resolution factor L, we define sub-domains of such that:with the sub-domain indices, whose size is:and such that .
- For each , the projection coefficients are given by:where is the restriction of U in the sub-domain and the polynomials defined in given sub-domain,
- The resulting multi-resolution structure is designed by grouping the projection coefficients according to polynomial degree from the basis used for the projection.
3. Pattern Recognition
3.1. Graph-Based Methods
3.2. Application to Integrated Circuits
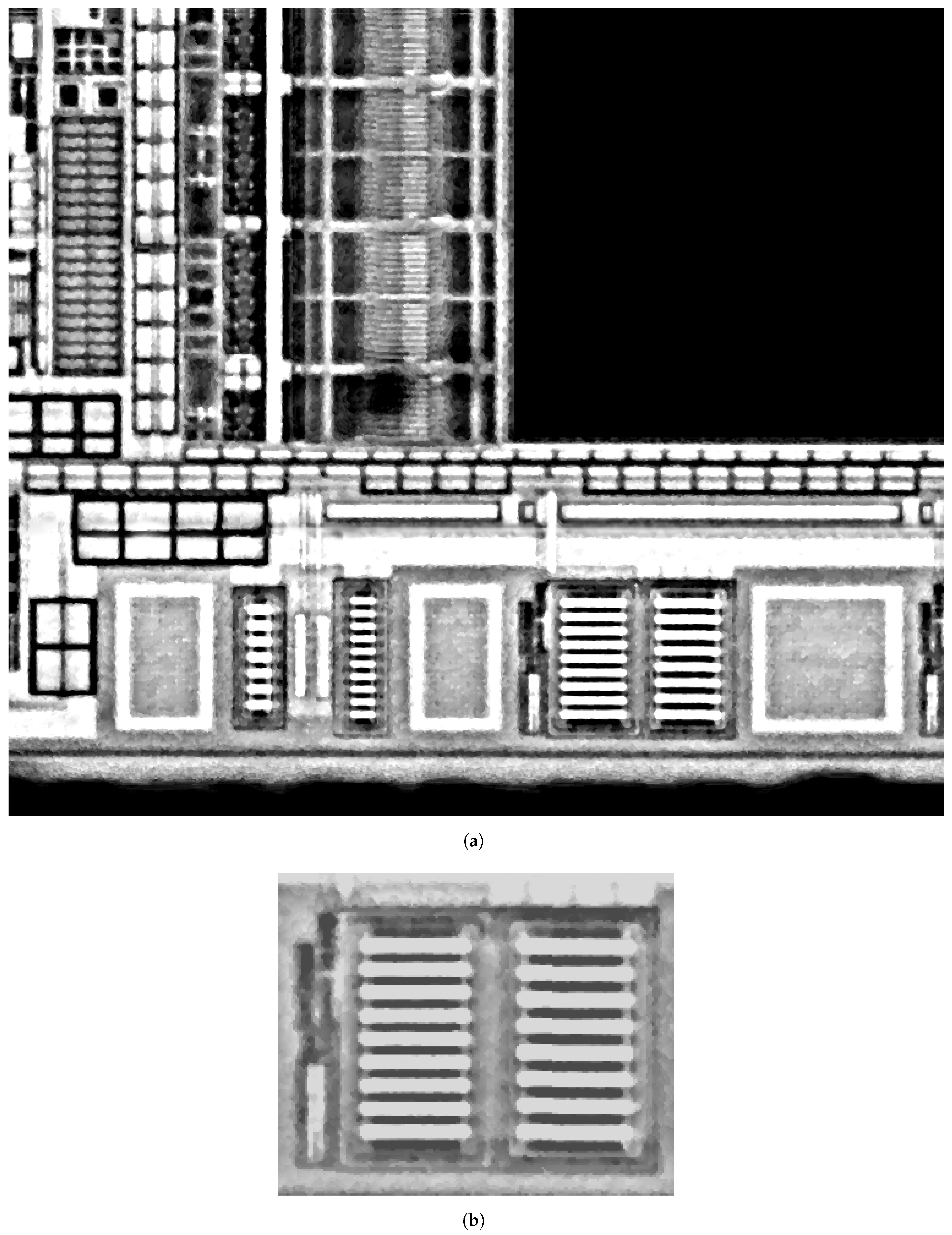
3.2.1. From Integrated-Circuit Image to Labeled Graph
- anisotropic-like filtering to reduce the infrared granular noise, following the method proposed in [34], based on polynomial decomposition and of an image and its adaptive reconstruction,
- binarizing using an adaptive Gaussian thresholding,
- skeletonizing based on the distance transform [58] and its ridge extraction.
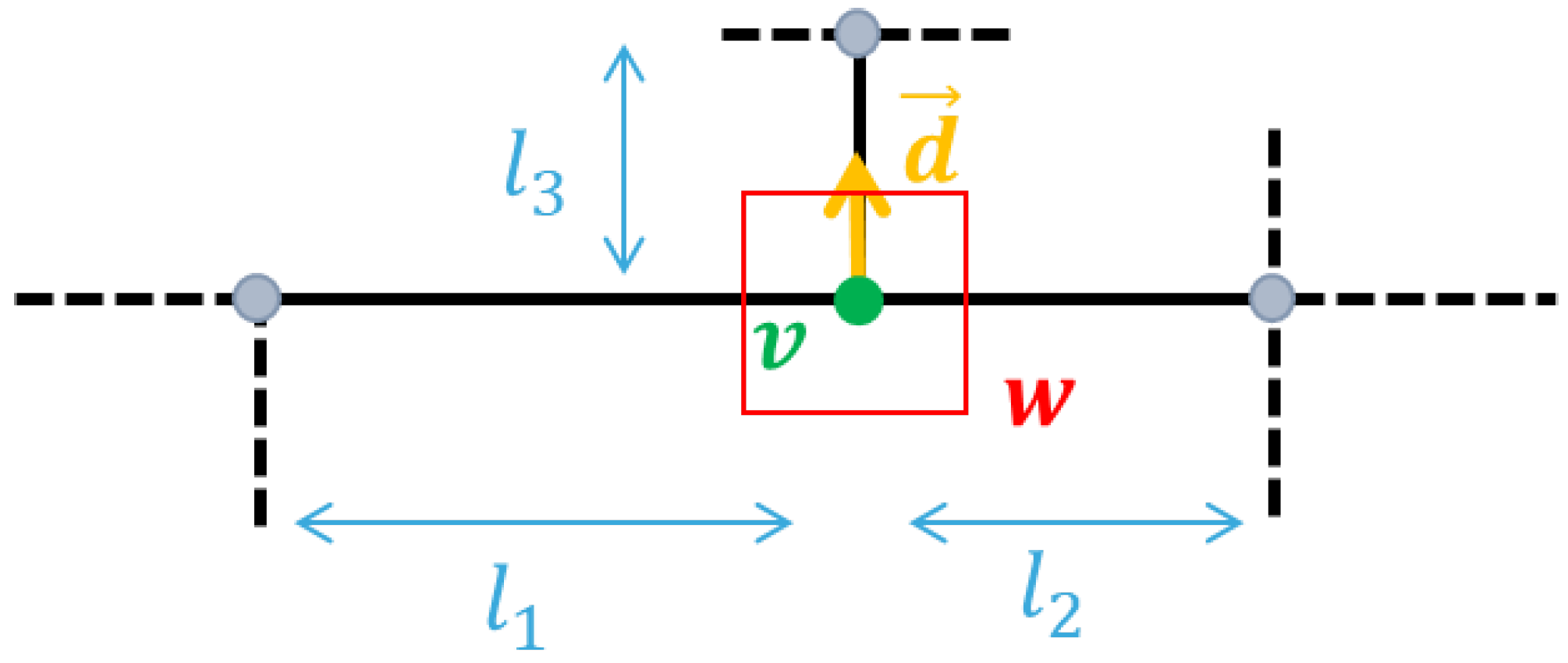
Structural Descriptor
- Considering a node and , the set of its x connected edges, ordered by length its structural descriptor is given bywhere is the length of edge .
- Considering an edge and , the set of its y connected edges, ordered by length its structural descriptor is given by
Textural Descriptor
- each window is centered on its corresponding node and of a size related to its smallest connected edges,
- if d is the main orientation provided by its connected edges, the gradients in the window are oriented according to d,
- the window is split into four sub-windows and each of the gradient intensity is weighted according to the global window intensity so that each of their histogram is less sensitive to non-linear brightness [60]. Number four is related to the maximal node connexity (at most four neighbors).
- for each node , its label is bipartite such that
- for each edge , its label is such that .
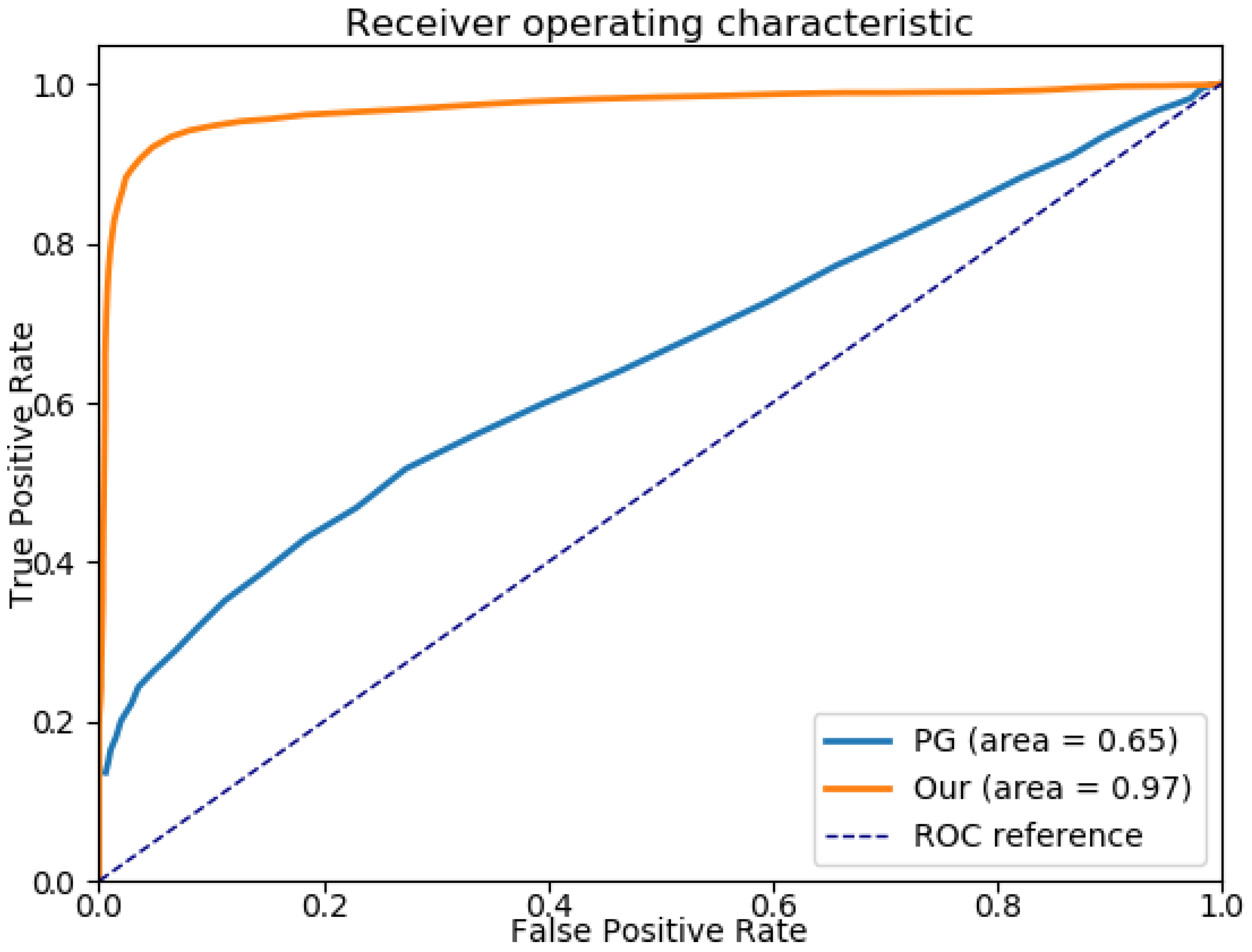
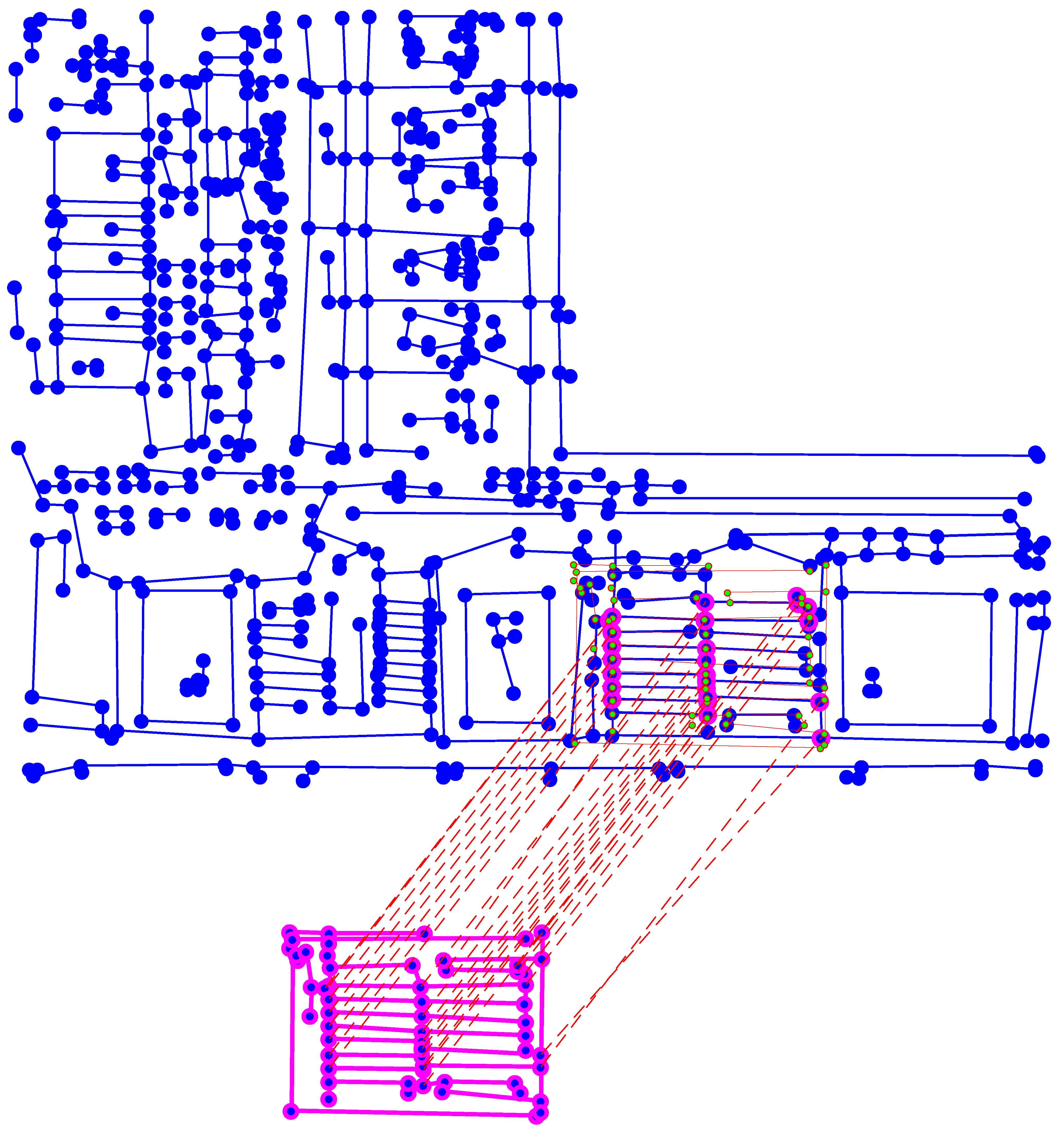
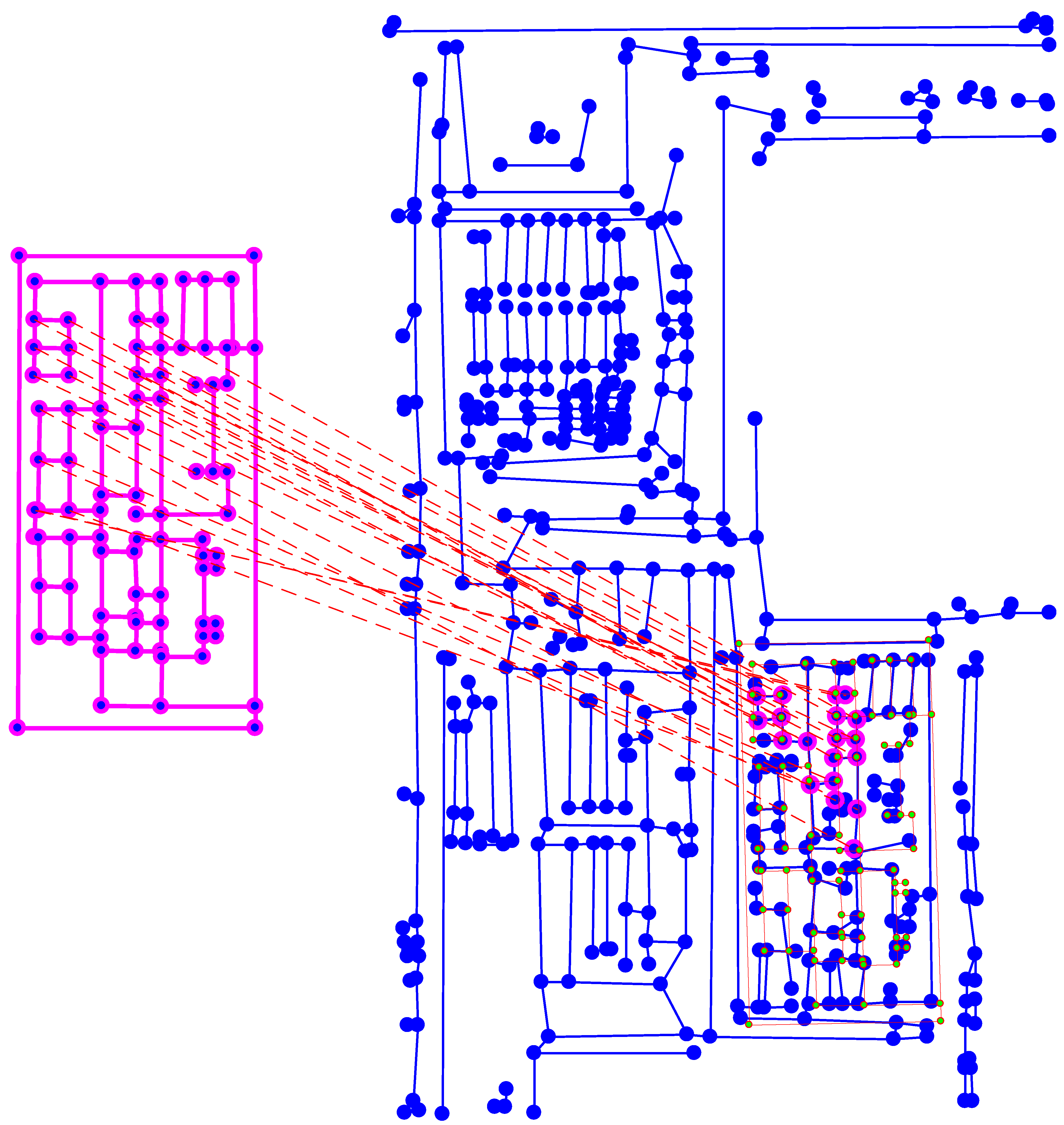
3.2.2. Matching Method for Integrated Pattern Location
- input graphs may be disconnected and PG preserves connectivity,
- no optimization condition constrains any global connectivity in the solution.
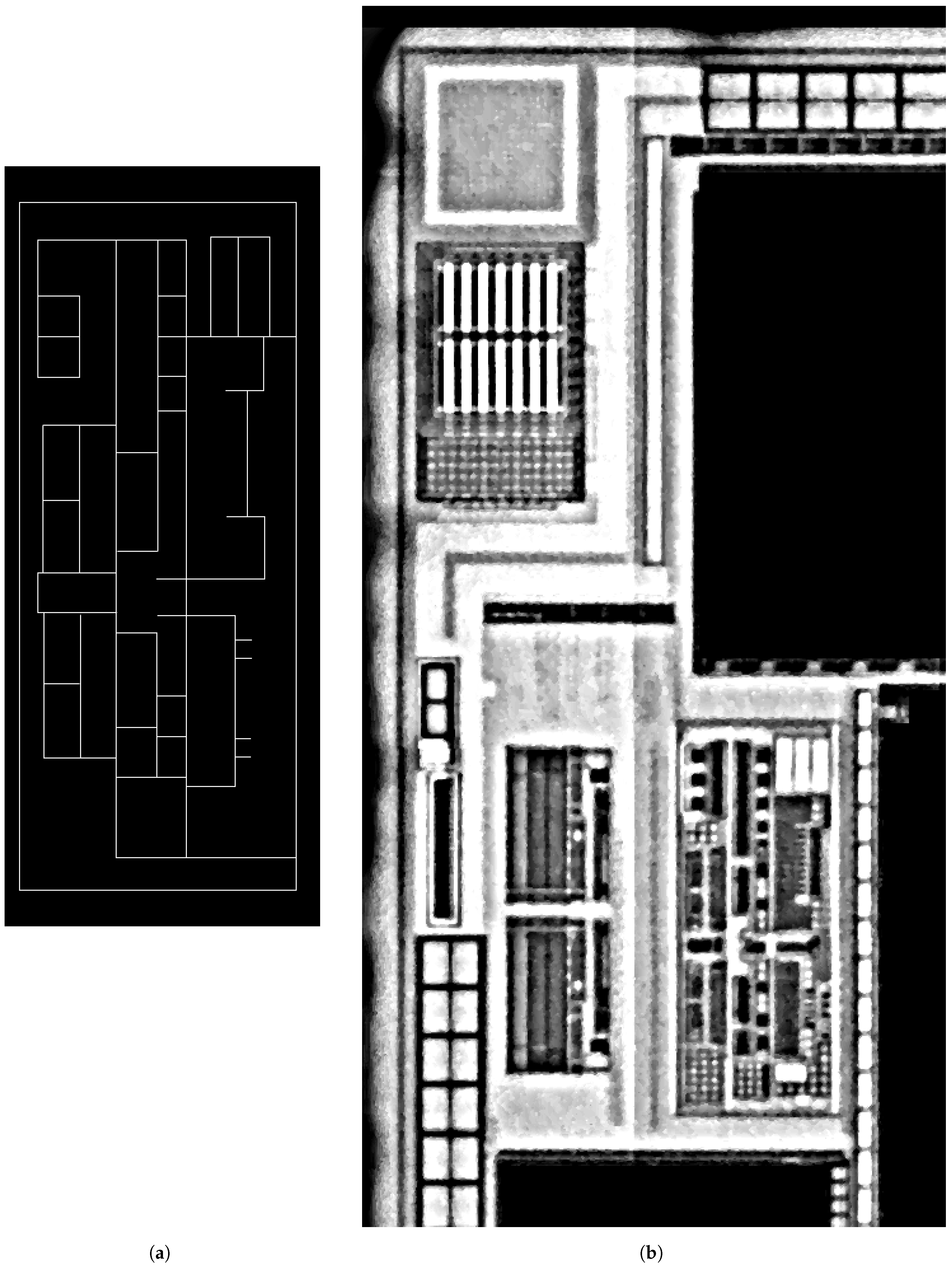
3.2.3. Location Method Validation
4. Experiments & Results
- (1)
- a photo acquisition of an electronic structure,
- (2)
- a synthetic image representing an electronic structure.
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Rahaman, H.; Champion, E. To 3D or Not 3D: Choosing a Photogrammetry Workflow for Cultural Heritage Groups. Herit. Sci. 2019, 2, 112. [Google Scholar] [CrossRef]
- Kang, T.W. 3D Image Scan Automation Planning based on Mobile Rover. J. Korea Acad. Ind. Coop. Soc. 2019, 20, 1–7. [Google Scholar] [CrossRef]
- Davis, A.; Belton, D.; Helmholz, P.; Bourke, P.; McDonald, J. Pilbara rock art: Laser scanning, photogrammetry and 3D photographic reconstruction as heritage management tools. Herit. Sci. 2017, 5, 1–16. [Google Scholar] [CrossRef]
- Bulgarevich, D.S.; Tsukamoto, S.; Kasuya, T.; Demura, M.; Watanabe, M. Pattern recognition with machine learning on optical microscopy images of typical metallurgical microstructures. Sci. Rep. 2018, 8, 1–8. [Google Scholar] [CrossRef] [PubMed]
- Kaur, P.; Krishan, K.; Sharma, S.K.; Kanchan, T. Facial-recognition algorithms: A literature review. Med. Sci. Law 2020, 60, 131–139. [Google Scholar] [CrossRef] [PubMed]
- Rosyda, S.S.; Purboyo, T.W. A Review of Various Handwriting Recognition Methods. Int. J. Appl. Eng. Res. 2018, 13, 1155–1164. [Google Scholar]
- Ngugi, L.C.; Abelwahab, M.; Abo-Zahhad, M. Recent advances in image processing techniques for automated leaf pest and disease recognition—A review. Inf. Process. Agric. 2020. [Google Scholar] [CrossRef]
- Asgari, S.; Scalzo, F.; Kasprowicz, M. Pattern Recognition in Medical Decision Support. BioMed Res. Int. 2019, 2019, 1–2. [Google Scholar] [CrossRef]
- Bertocci, F.; Grandoni, A.; Djuric-Rissner, T. Scanning Acoustic Microscopy (SAM): A Robust Method for Defect Detection during the Manufacturing Process of Ultrasound Probes for Medical Imaging. Sensors 2019, 19, 4868. [Google Scholar] [CrossRef] [PubMed]
- Zhao, G.; Qin, S. High-Precision Detection of Defects of Tire Texture Through X-ray Imaging Based on Local Inverse Difference Moment Features. Sensors 2018, 18, 2524. [Google Scholar] [CrossRef]
- Aryan, P.; Sampath, S.; Sohn, H. An Overview of Non-Destructive Testing Methods for Integrated Circuit Packaging Inspection. Sensors 2018, 18, 1981. [Google Scholar] [CrossRef] [PubMed]
- Courbon, F. Retro-Conception Matérielle Partielle Appliquée à L’injection Ciblée de Fautes Laser et à la Détection Efficace de Chevaux de Troie Matériels. Ph.D. Thesis, Mines Saint-Etienne, Saint-Etienne, France, 2015. [Google Scholar]
- Courbon, F.; Fournier, J.J.A.; Loubet-Moundi, P.; Tria, A. Combining Image Processing and Laser Fault Injections for Characterizing a Hardware AES. IEEE Trans. Comput.-Aided Des. Integr. Circuits Syst. 2015, 34, 928–936. [Google Scholar] [CrossRef]
- Neumann, B. Autofokussierung. Leitz-Mitt. Wiss. Techn. 1985, 8, 228–232. [Google Scholar]
- Neumann, B.; Dämon, A.; Hogenkamp, D.; Beckmann, E.; Kollmann, J. A laser-autofocus for automatic microscopy and metrology. Sens. Actuators 1989, 17, 267–272. [Google Scholar] [CrossRef]
- Hansard, M.; Lee, S.; Choi, O.; Horaud, R. Time of Flight Cameras: Principles, Methods, and Applications; SpringerBriefs in Computer Science, Springer Science & Business Media: Berlin, Germany, 2012; p. 95. [Google Scholar] [CrossRef]
- Dutton, N.; Yang, X.; Channon, K. Time of Flight Sensing for Brightness and Autofocus Control in Image Projection Devices. U.S. Patent 2018091784A1, 29 March 2018. [Google Scholar]
- Bathe-Peters, M.; Annibale, P.; Lohse, M.J. All-optical microscope autofocus based on an electrically tunable lens and a totally internally reflected IR laser. Opt. Express 2018, 26, 2359–2368. [Google Scholar] [CrossRef]
- Wang, Z.; Bovik, A.C.; Lu, L. Why is image quality assessment so difficult? In Proceedings of the IEEE International Conference on Acoustics, Speech, and Signal Processing (ICASSP 2002), Orlando, FL, USA, 13–17 May 2002; pp. 3313–3316. [Google Scholar] [CrossRef]
- Krotkov, E. Focusing. Int. J. Comput. Vis. 1988, 1, 223–237. [Google Scholar] [CrossRef]
- Xu, X.; Wang, Y.; Tang, J.; Zhang, X.; Liu, X. Robust Automatic Focus Algorithm for Low Contrast Images Using a New Contrast Measure. Sensors 2011, 11, 8281–8294. [Google Scholar] [CrossRef]
- Fonseca, E.; Fiadeiro, P.; Pereira, M.; Pinheiro, A. Comparative analysis of autofocus functions in digital in-line phase-shifting holography, Autofocus. Appl. Opt. 2016, 55, 7663. [Google Scholar] [CrossRef] [PubMed]
- Podlech, S. Autofocus by Bayes Spectral Entropy Applied to Optical Microscopy. Microsc. Microanal. 2016, 22, 199–207. [Google Scholar] [CrossRef]
- Zhang, X.; Wu, H.; Ma, Y. A new auto-focus measure based on medium frequency discrete cosine transform filtering and discrete cosine transform. Appl. Comput. Harmon. Anal. 2016, 40, 430–437. [Google Scholar] [CrossRef]
- Zhang, Z.; Liu, Y.; Xiong, Z.; Li, J.; Zhang, M. Focus and Blurriness Measure Using Reorganized DCT Coefficients for an Autofocus Application. IEEE Trans. Circuits Syst. Video Technol. 2018, 28, 15–30. [Google Scholar] [CrossRef]
- Fan, Z.; Chen, S.; Hu, H.; Chang, H.; Fu, Q. Autofocus algorithm based on Wavelet Packet Transform for infrared microscopy. In Proceedings of the 2010 3rd International Congress on Image and Signal Processing, Yantai, China, 16–18 October 2010; Volume 5, pp. 2510–2514. [Google Scholar] [CrossRef]
- Zhang, X.; Jia, C.; Xie, K. Evaluation of Autofocus Algorithm for Automatic Dectection of Caenorhabditis elegans Lipid Droplets. Prog. Biochem. Biophys. (PBB) 2016, 43, 167–175. [Google Scholar] [CrossRef]
- Abelé, R.; Fronte, D.; Liardet, P.; Boï, J.; Damoiseaux, J.; Merad, D. Autofocus in infrared microscopy. In Proceedings of the 23rd IEEE International Conference on Emerging Technologies and Factory Automation (ETFA 2018), Torino, Italy, 4–7 September 2018; pp. 631–637. [Google Scholar] [CrossRef]
- Srivastava, A.K.; Kandpal, N. Design and Implementation of a Real-Time Autofocus Algorithm for Thermal Imagers. In Proceedings of the International Conference on Computer Vision and Image Processing (CVIP 2016), Roorkee, India, 26–28 February 2016; Raman, B., Kumar, S., Roy, P.P., Sen, D., Eds.; Springer: Singapore, 2017; Volume 1, pp. 377–387. [Google Scholar] [CrossRef]
- Abelé, R.; El Moubtahij, R.; Fronte, D.; Liardet, P.Y.; Damoiseaux, J.L.; Boï, J.M.; Merad, D. FMPOD: A Novel Focus Metric Based on Polynomial Decomposition for Infrared Microscopy. IEEE Photonics J. 2019, 11, 1–17. [Google Scholar] [CrossRef]
- Eden, M.; Unser, M.; Leonardi, R. Polynomial representation of pictures. Signal Process. 1986, 10, 385–393. [Google Scholar] [CrossRef]
- Kihl, O.; Tremblais, B.; Augereau, B. Multivariate orthogonal polynomials to extract singular points. In Proceedings of the International Conference on Image Processing (ICIP 2008), San Diego, CA, USA, 12–15 October 2008; pp. 857–860. [Google Scholar] [CrossRef]
- Kihl, O. Modélisations Polynomiales Hiérarchisées Applications à L’analyse de Mouvements Complexes. Ph.D. Thesis, Université de Poitiers, Poitiers, France, 2012. [Google Scholar]
- El Moubtahij, R.; Augereau, B.; Tairi, H.; Fernandez-Maloigne, C. A polynomial texture extraction with application in dynamic texture classification. In Proceedings of the Twelfth International Conference on Quality Control by Artificial Vision (CQAV 2015), Le Creusot, France, 3–5 June 2015; Volume 9534, p. 953407. [Google Scholar] [CrossRef]
- Bordei, C.; Bourdon, P.; Augereau, B.; Carré, P. Polynomial based texture representation for facial expression recognition, polynomial. In Proceedings of the IEEE International Conference on Acoustics, Speech and Signal Processing (ICASSP 2014), Florence, Italy, 4–9 May 2014; pp. 529–533. [Google Scholar] [CrossRef]
- El Moubtahij, R.; Augereau, B.; Tairi, H.; Fernandez-Maloigne, C. Spatial image polynomial decomposition with application to video classification. J. Electron. Imaging 2015, 24, 061114. [Google Scholar] [CrossRef][Green Version]
- El Moubtahij, R. Transformations Polynomiales: Applications à L’estimation de Mouvements et à la Classification de Vidéos. Ph.D. Thesis, Université de Poitiers, Poitiers, France, 2016. [Google Scholar]
- Mallat, S.G. A theory for multiresolution signal decomposition: The wavelet representation. IEEE Trans. Pattern Anal. Mach. Intell. 1989, 11, 674–693. [Google Scholar] [CrossRef]
- Lewis, J.P. Fast Normalized Cross-Correlation. Circuits Syst. Signal Process. 2009, 28, 819–843. [Google Scholar]
- Robles-Kelly, A.; Hancock, E.R. String Edit Distance, Random Walks And Graph Matching. Int. J. Pattern Recognit. Artif. Intell. 2004, 18, 315–327. [Google Scholar] [CrossRef]
- Chen, X.; Huo, H.; Huan, J.; Vitter, J.S. Efficient Graph Similarity Search in External Memory. IEEE Access 2017, 5, 4551–4560. [Google Scholar] [CrossRef]
- Wang, R.; Fang, Y.; Feng, X. Efficient Parallel Computing of Graph Edit Distance. In Proceedings of the 35th IEEE International Conference on Data Engineering Workshops, ICDE Workshops 2019, Macao, China, 8–12 April 2019; pp. 233–240. [Google Scholar] [CrossRef]
- Robles-Kelly, A.; Hancock, E.R. Graph edit distance from spectral seriation. IEEE Trans. Pattern Anal. Mach. Intell. 2005, 27, 365–378. [Google Scholar] [CrossRef]
- Levenshtein, V.I. Binary codes capable of correcting deletions, insertions, and reversals. Sov. Phys. Dokl. 1966, 10, 707–710. [Google Scholar]
- Bougleux, S.; Brun, L.; Carletti, V.; Foggia, P.; Gaüzère, B.; Vento, M. Graph edit distance as a quadratic assignment problem. Pattern Recognit. Lett. 2017, 87, 38–46. [Google Scholar] [CrossRef]
- Lawler, E.L. The Quadratic Assignment Problem. Manag. Sci. 1963, 9, 586–599. [Google Scholar] [CrossRef]
- Lyzinski, V.; Fishkind, D.E.; Fiori, M.; Vogelstein, J.T.; Priebe, C.E.; Sapiro, G. Graph Matching: Relax at Your Own Risk. IEEE Trans. Pattern Anal. Mach. Intell. 2016, 38, 60–73. [Google Scholar] [CrossRef]
- Gold, S.; Rangarajan, A. A Graduated Assignment Algorithm for Graph Matching. IEEE Trans. Pattern Anal. Mach. Intell. 1996, 18, 377–388. [Google Scholar] [CrossRef]
- Hazan, E.; Levy, K.Y.; Shalev-Shwartz, S. On Graduated Optimization for Stochastic Non-Convex Problems. In Proceedings of the 33nd International Conference on Machine Learning (ICML 2016), New York City, NY, USA, 19–24 June 2016; Volume 48, pp. 1833–1841. [Google Scholar] [CrossRef]
- Zaslavskiy, M.; Bach, F.; Vert, J. A Path Following Algorithm for the Graph Matching Problem. IEEE Trans. Pattern Anal. Mach. Intell. 2009, 31, 2227–2242. [Google Scholar] [CrossRef] [PubMed]
- Zhou, F.; De la Torre, F. Factorized Graph Matching. IEEE Trans. Pattern Anal. Mach. Intell. 2016, 38, 1774–1789. [Google Scholar] [CrossRef]
- Duchenne, O.; Bach, F.R.; Kweon, I.; Ponce, J. A Tensor-Based Algorithm for High-Order Graph Matching. IEEE Trans. Pattern Anal. Mach. Intell. 2011, 33, 2383–2395. [Google Scholar] [CrossRef]
- Yan, J.; Li, C.; Li, Y.; Cao, G. Adaptive Discrete Hypergraph Matching. IEEE Trans. Cybern. 2018, 48, 765–779. [Google Scholar] [CrossRef]
- Dutta, A.; Lladós, J.; Bunke, H.; Pal, U. Product graph-based higher order contextual similarities for inexact subgraph matching. Pattern Recognit. 2018, 76, 596–611. [Google Scholar] [CrossRef]
- Yan, J.; Yin, X.C.; Lin, W.; Deng, C.; Zha, H.; Yang, X. A Short Survey of Recent Advances in Graph Matching. In Proceedings of the 2016 ACM on International Conference on Multimedia Retrieval (ICMR 2016), New York, NY, USA, 6–9 June 2016; pp. 167–174. [Google Scholar] [CrossRef]
- Emmert-Streib, F.; Dehmer, M.; Shi, Y. Fifty years of graph matching, network alignment and network comparison. Inf. Sci. 2016, 346–347, 180–197. [Google Scholar] [CrossRef]
- Goyal, P.; Ferrara, E. Graph embedding techniques, applications, and performance: A survey. Knowl.-Based Syst. 2018, 151, 78–94. [Google Scholar] [CrossRef]
- Felzenszwalb, P.F.; Huttenlocher, D. Distance Transforms of Sampled Functions. Theory Comput. 2012, 8, 415–428. [Google Scholar] [CrossRef]
- Hough, P.V.C. Method and Means For recognizing Complex Patterns. U.S. Patent 3,069,654, 18 December 1962. [Google Scholar]
- Dalal, N.; Triggs, B. Histograms of oriented gradients for human detection. In Proceedings of the 2005 IEEE Computer Society Conference on Computer Vision and Pattern Recognition (CVPR 2005), San Diego, CA, USA, 20–26 June 2005; Volume 1, pp. 886–893. [Google Scholar] [CrossRef]
- McConnell, R.K. Method of and Apparatus for Pattern Recognition. U.S. Patent 4,567,610, 28 January 1986. [Google Scholar]
- Soler, J.D.; Beuther, H.; Rugel, M.; Wang, Y.; Clark, P.C.; Glover, S.C.O.; Goldsmith, P.F.; Heyer, M.; Anderson, L.D.; Goodman, A.; et al. Histogram Of Oriented Gradients: A Technique For The Study Of Molecular Cloud Formation. Astron. Astrophys. 2019, 622, A166. [Google Scholar] [CrossRef]
- Le Bodic, P.; Héroux, P.; Adam, S.; Lecourtier, Y. An integer linear program for substitution-tolerant subgraph isomorphism and its use for symbol spotting in technical drawings. Pattern Recognit. 2012, 45, 4214–4224. [Google Scholar] [CrossRef]
- Yang, X.; Prasad, L.; Latecki, L.J. Affinity Learning with Diffusion on Tensor Product Graph. IEEE Trans. Pattern Anal. Mach. Intell. 2013, 35, 28–38. [Google Scholar] [CrossRef] [PubMed]
- Le, T.N.; Luqman, M.M.; Dutta, A.; Héroux, P.; Rigaud, C.; Guérin, C.; Foggia, P.; Burie, J.C.; Ogier, J.M.; Lladós, J.; et al. Subgraph spotting in graph representations of comic book images. Pattern Recognit. Lett. 2018, 112, 118–124. [Google Scholar] [CrossRef]
- Cho, M.; Lee, J.; Lee, K.M. Reweighted Random Walks for Graph Matching. In Proceedings of the Computer Vision- ECCV 2010-11th European Conference on Computer Vision, Heraklion, Crete, Greece, 5–11 September 2010; Part V. pp. 492–505. [Google Scholar] [CrossRef]
- Aziz, F.; Wilson, R.C.; Hancock, E.R. Backtrackless Walks on a Graph. IEEE Trans. Neural Netw. Learn. Syst. 2013, 24, 977–989. [Google Scholar] [CrossRef] [PubMed]
- Abelé, R.; Damoiseaux, J.; Fronte, D.; Liardet, P.; Boï, J.; Merad, D. Graph Matching Applied For Textured Pattern Recognition. In Proceedings of the IEEE International Conference on Image Processing (ICIP 2020), Abu Dhabi, United Arab Emirates, 25–28 October 2020; pp. 1451–1455. [Google Scholar] [CrossRef]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Given a Node v | Given an Edge e | |
|---|---|---|
| Let {} be its # connected edges in decreasing order |  |  |
| Its structural descriptor |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Abelé, R.; Damoiseaux, J.-L.; Moubtahij, R.E.; Boi, J.-M.; Fronte, D.; Liardet, P.-Y.; Merad, D. Spatial Location in Integrated Circuits through Infrared Microscopy. Sensors 2021, 21, 2175. https://doi.org/10.3390/s21062175
Abelé R, Damoiseaux J-L, Moubtahij RE, Boi J-M, Fronte D, Liardet P-Y, Merad D. Spatial Location in Integrated Circuits through Infrared Microscopy. Sensors. 2021; 21(6):2175. https://doi.org/10.3390/s21062175
Chicago/Turabian StyleAbelé, Raphaël, Jean-Luc Damoiseaux, Redouane El Moubtahij, Jean-Marc Boi, Daniele Fronte, Pierre-Yvan Liardet, and Djamal Merad. 2021. "Spatial Location in Integrated Circuits through Infrared Microscopy" Sensors 21, no. 6: 2175. https://doi.org/10.3390/s21062175
APA StyleAbelé, R., Damoiseaux, J.-L., Moubtahij, R. E., Boi, J.-M., Fronte, D., Liardet, P.-Y., & Merad, D. (2021). Spatial Location in Integrated Circuits through Infrared Microscopy. Sensors, 21(6), 2175. https://doi.org/10.3390/s21062175