
Standards-Compliant Multi-Protocol On-Board Unit for the Evaluation of Connected and Automated Mobility Services in Multi-Vendor Environments †

 , ,
, ,  , , ,
, , , {kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
2. Related Work
3. ACCA Service
3.1. Architecture
3.2. V2X Information Flow
4. On-Board Unit Implementation
4.1. Hardware Setup
4.2. V2X Communication Protocols
- { "type": "denm",
- "origin": "on_board_application",
- "version": "1.0.0",
- "source_id": "obu_cttc_1",
- "timestamp": 1574778515425,
- "message": {
- "protocol_version": 1,
- "station_id": 225,
- "management_container": {
- "action_id": {
- "originating_station_id": 41,
- "sequence_number": 1 },
- "detection_time": 503253332000,
- "reference_time": 503253330000,
- "termination": 1,
- "event_position": {
- "latitude": 486263556,
- "longitude": 224921234,
- "altitude": 20000 } } },
- ...
- "situation_container": {
- "information_quality": 1,
- "event_type": {
- "cause": 97,
- "subcause": 0 },
- "linked_cause": {
- "cause": 1,
- "subcause": 1 } },
4.3. Hardware Interfaces with Vehicle’s Sensors and Actuators
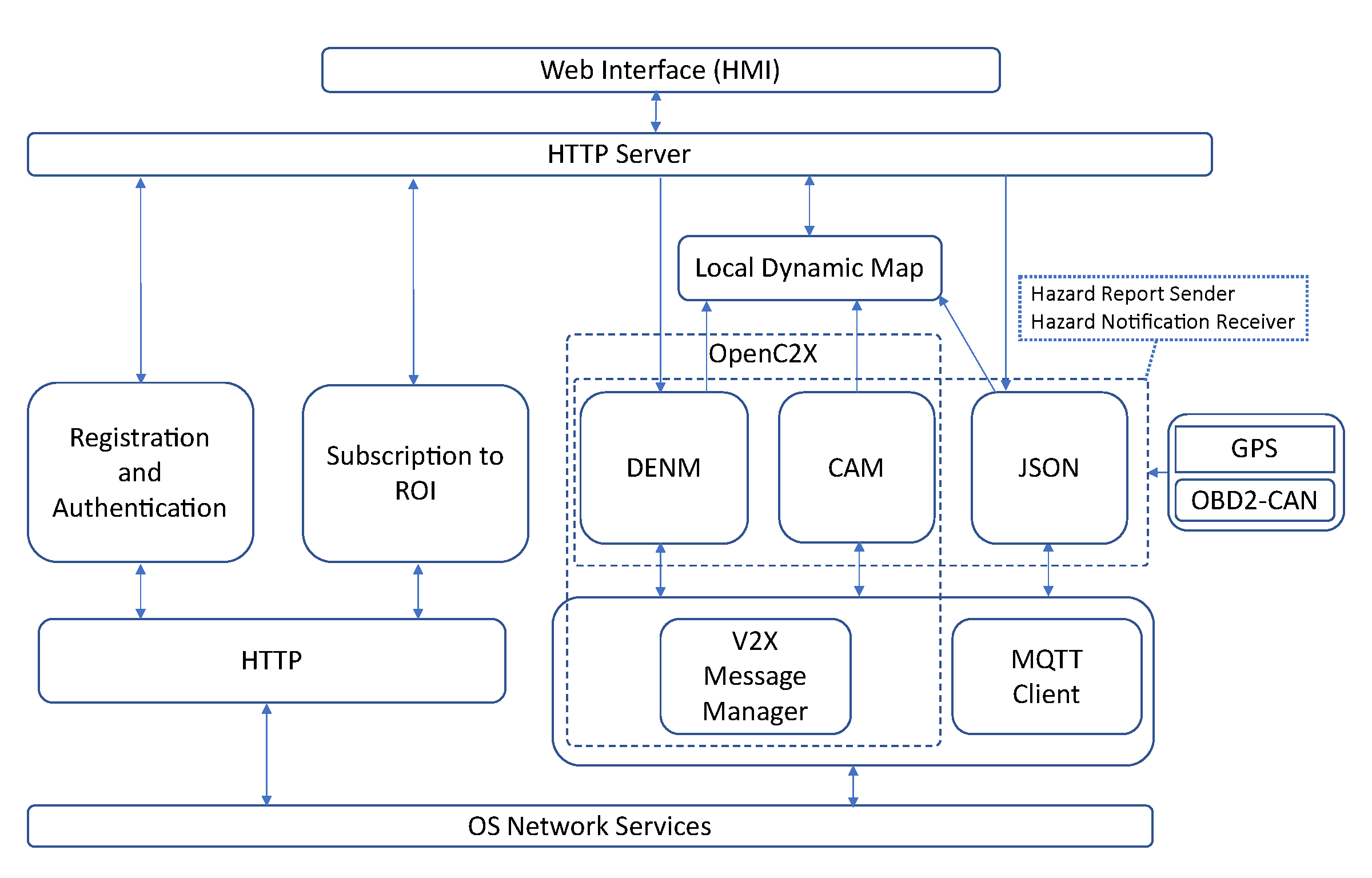
4.4. Software Architecture
5. Experimental Evaluation
5.1. Test Setup
5.2. Functional Validation
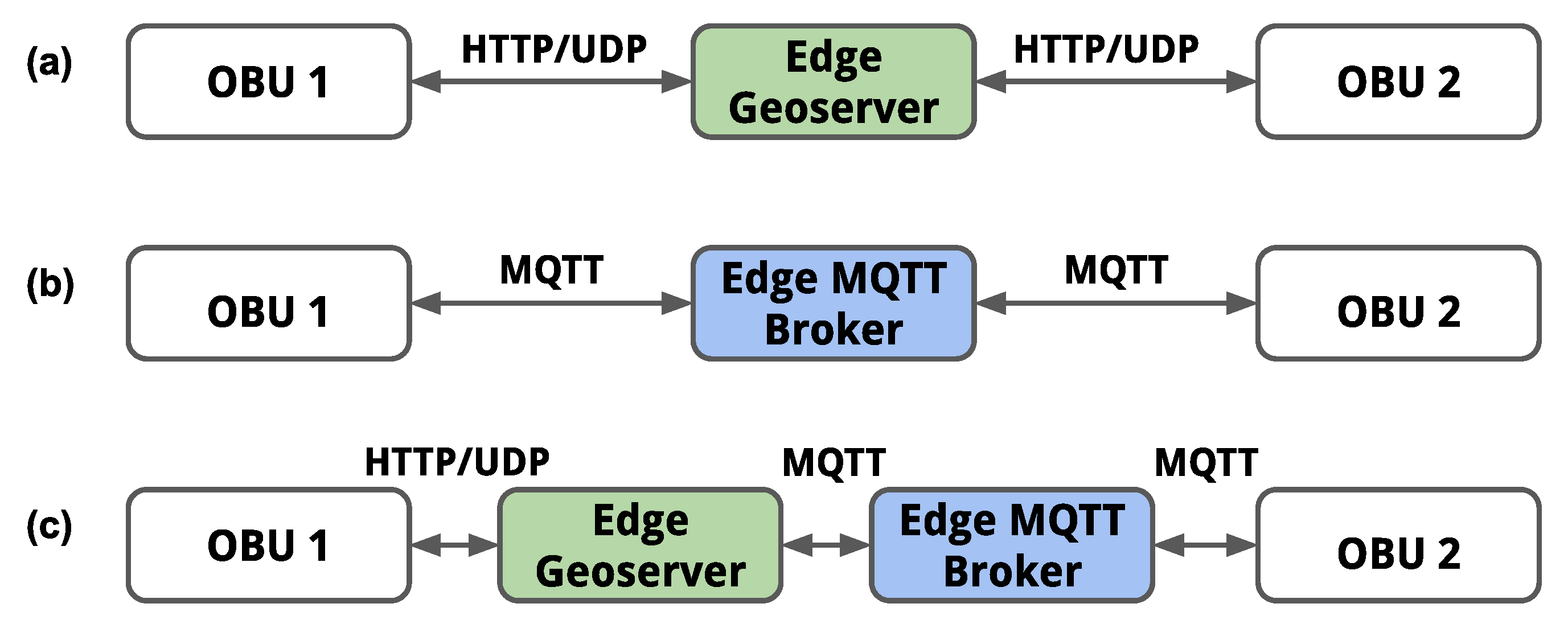
5.2.1. UDP/HTTP-Based Communications
5.2.2. MQTT-Based Communications
5.2.3. Hybrid UDP/HTTP and MQTT-Based Communications
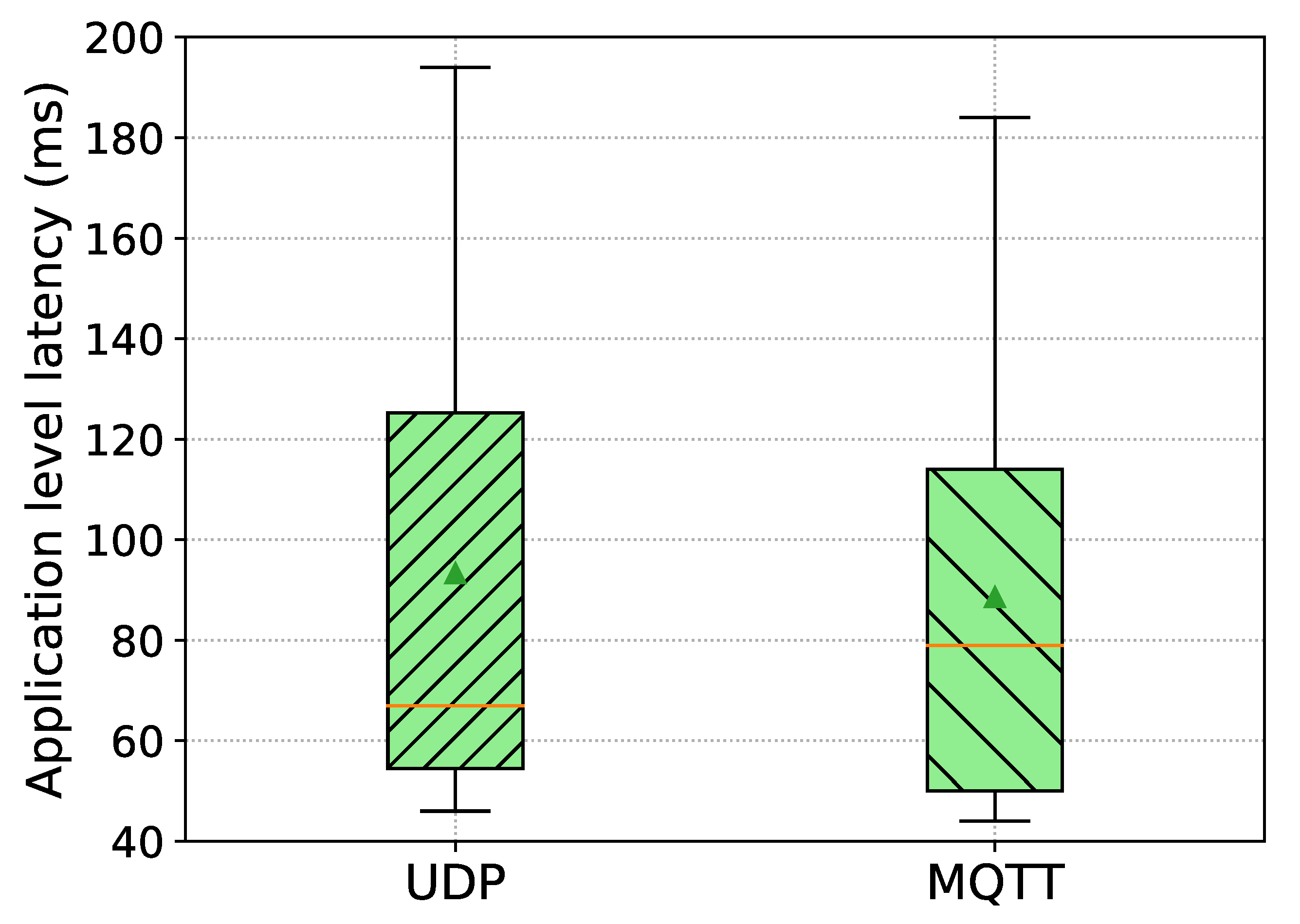
5.3. Application-Level Latency Results
5.3.1. Hazard Detected by a Vehicle
5.3.2. Hazard Reported by the Traffic Management System
6. Discussion
7. Conclusions and Future Work
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| ACCA | Anticipated Cooperative Collision Avoidance |
| ASN.1 | Abstract Syntax Notation One |
| BTP | Basic Transport Protocol |
| CAM | Cooperative Awareness Message |
| CAN | Control Area Network |
| CCAM | Cooperative, Connected and Automated Mobility |
| C-ITS | Cooperative Intelligent Transport System |
| C-V2X | Cellular Vehicle-to-Everything |
| DENM | Decentralized Environmental Notification Message |
| DSRC | Dedicated Short-Range Communications |
| ETSI | European Telecommunications Standards Institute |
| HMI | Human-Machine Interface |
| ITS | Intelligent Transport System |
| MQTT | Message Queuing Telemetry Transport protocol |
| MEC | Mobile Edge Computing |
| MNO | Mobile Network Operator |
| OBU | On-Board Unit |
| OEM | Original Equipment Manufacturer |
| RAN | Radio Access Network |
| ROI | Region of Interest |
| RSU | Roadside Unit |
| TMS | Traffic Management System |
| V2I | Vehicle-to-Infrastructure |
| V2N | Vehicle-to-Network |
| V2P | Vehicle-to-Pedestrian |
| V2V | Vehicle-to-Vehicle |
| V2X | Vehicle-to-Everything |
References
- Datta, S.K.; Da Costa, R.P.F.; Härri, J.; Bonnet, C. Integrating connected vehicles in Internet of Things ecosystems: Challenges and solutions. In Proceedings of the 2016 IEEE 17th International Symposium on A World of Wireless, Mobile and Multimedia Networks (WoWMoM), Coimbra, Portugal, 21–24 June 2016; pp. 1–6. [Google Scholar] [CrossRef]
- Datta, S.K.; Haerri, J.; Bonnet, C.; Ferreira Da Costa, R. Vehicles as Connected Resources: Opportunities and Challenges for the Future. IEEE Veh. Technol. Mag. 2017, 12, 26–35. [Google Scholar] [CrossRef]
- ETSI. Automotive Intelligent Transport Systems (ITS). Available online: https://www.etsi.org/technologies/automotive-intelligent-transport (accessed on 29 December 2020).
- Schulz, W.H.; Wieker, H.; Arnegger, B. Cooperative, Connected and Automated Mobility; Springer: Cham, Switzerland, 2019; pp. 219–229. [Google Scholar] [CrossRef]
- Datta, S.K.; Bonnet, C.; Haerri, J. Fog Computing architecture to enable consumer centric Internet of Things services. In Proceedings of the 2015 International Symposium on Consumer Electronics (ISCE), Madrid, Spain, 24–26 June 2015; pp. 1–2. [Google Scholar] [CrossRef]
- Fallgren, M.; Dillinger, M.; Alonso-Zarate, J.; Boban, M.; Abbas, T.; Manolakis, K.; Mahmoodi, T.; Svensson, T.; Laya, A.; Vilalta, R. Fifth-Generation Technologies for the Connected Car: Capable Systems for Vehicle-to-Anything Communications. IEEE Veh. Technol. Mag. 2018, 13, 28–38. [Google Scholar] [CrossRef]
- Garcia-Roger, D.; González, E.E.; Martín-Sacristán, D.; Monserrat, J.F. V2X Support in 3GPP Specifications: From 4G to 5G and Beyond. IEEE Access 2020, 8, 190946–190963. [Google Scholar] [CrossRef]
- 5GAA. Toward Fully Connected Vehicles: Edge Computing for Advanced Automotive Communications. Available online: https://5gaa.org/wp-content/uploads/2017/12/5GAA_T-170219-whitepaper-EdgeComputing_5GAA.pdf (accessed on 20 January 2021).
- Condoluci, M.; Gallo, L.; Mussot, L.; Kousaridas, A.; Spapis, P.; Mahlouji, M.; Mahmoodi, T. 5G V2X System-Level Architecture of 5GCAR Project. Future Internet 2019, 11, 217. [Google Scholar] [CrossRef]
- NOKIA. Car2MEC Project. Available online: https://www.nokia.com/about-us/news/releases/2019/03/21/continental-deutsche-telekom-fraunhofer-esk-mhp-and-nokia-successfully-conclude-tests-of-connected-driving-technology-on-the-a9-digital-test-track/ (accessed on 23 December 2020).
- 5GCroCo. 5G Cross Border Control. Available online: https://5gcroco.eu/ (accessed on 29 December 2020).
- Kousaridas, A.; Schimpe, A.; Euler, S.; Vilajosana, X.; Fallgren, M.; Landi, G.; Moscatelli, F.; Barmpounakis, S.; Vázquez-Gallego, F.; Sedar, R.; et al. 5G Cross-Border Operation for Connected and Automated Mobility: Challenges and Solutions. Future Internet 2019, 12, 5. [Google Scholar] [CrossRef]
- Sedar, R.; Vázquez-Gallego, F.; Casellas, R.; Vilalta, R.; Muñoz, R.; Silva, R.; Dizambourg, L.; Fernández, A.; Alonso-Zarate, J. An Experimental Vehicular On-Board Unit for the Execution of Anticipated Cooperative Collision Avoidance Services in Cross-Border Scenarios. In Proceedings of the 14th International Workshop on Wireless Network Testbeds, Experimental Evaluation and Characterization (WiNTECH’20), London, UK, 25 September 2020; pp. 118–119. [Google Scholar] [CrossRef]
- Muñoz, R.; Vázquez-Gallego, F.; Casellas, R.; Vilalta, R.; Sedar, R.; Alemany, P.; Martinez, R.; Alonso-Zárate, J.; Papageorgiou, A.; Catalan-Cid, M.; et al. 5GCroCo Barcelona Trial Site for Cross-border Anticipated Cooperative Collision Avoidance. In Proceedings of the 2020 European Conference on Networks and Communications (EuCNC), Dubrovnik, Croatia, 15–18 June 2020; pp. 34–39. [Google Scholar] [CrossRef]
- Jafari, A.; Al-Khayatt, S.; Dogman, A. Performance evaluation of IEEE 802.11p for vehicular communication networks. In Proceedings of the 2012 8th International Symposium on Communication Systems, Networks Digital Signal Processing (CSNDSP), Poznan, Poland, 18–20 July 2012; pp. 1–5. [Google Scholar] [CrossRef]
- Xu, Z.; Li, X.; Zhao, X.; Zhang, M.H.; Wang, Z. DSRC versus 4G-LTE for Connected Vehicle Applications: A Study on Field Experiments of Vehicular Communication Performance. J. Adv. Transp. 2017, 2017, 1–10. [Google Scholar] [CrossRef]
- Chen, S.; Hu, J.; Shi, Y.; Peng, Y.; Fang, J.; Zhao, R.; Zhao, L. Vehicle-to-Everything (v2x) Services Supported by LTE-Based Systems and 5G. IEEE Commun. Stand. Mag. 2017, 1, 70–76. [Google Scholar] [CrossRef]
- Wang, X.; Mao, S.; Gong, M.X. An Overview of 3GPP Cellular Vehicle-to-Everything Standards. GetMobile Mob. Comput. Commun. 2017, 21, 19–25. [Google Scholar] [CrossRef]
- Festag, A. Cooperative intelligent transport systems standards in europe. IEEE Commun. Mag. 2014, 52, 166–172. [Google Scholar] [CrossRef]
- Sjoberg, K.; Andres, P.; Buburuzan, T.; Brakemeier, A. Cooperative Intelligent Transport Systems in Europe: Current Deployment Status and Outlook. IEEE Veh. Technol. Mag. 2017, 12, 89–97. [Google Scholar] [CrossRef]
- Dey, K.C.; Rayamajhi, A.; Chowdhury, M.; Bhavsar, P.; Martin, J. Vehicle-to-vehicle (V2V) and vehicle-to-infrastructure (V2I) communication in a heterogeneous wireless network – Performance evaluation. Transp. Res. Part Emerg. Technol. 2016, 68, 168–184. [Google Scholar] [CrossRef]
- Jiang, D.; Delgrossi, L. IEEE 802.11p: Towards an International Standard for Wireless Access in Vehicular Environments. In Proceedings of the VTC Spring 2008-IEEE Vehicular Technology Conference, Singapore, 11–14 May 2008; pp. 2036–2040. [Google Scholar] [CrossRef]
- Laux, S.; Pannu, G.S.; Schneider, S.; Tiemann, J.; Klingler, F.; Sommer, C.; Dressler, F. OpenC2X—An Open Source Experimental and Prototyping Platform Supporting ETSI ITS-G5. In Proceedings of the 8th IEEE Vehicular Networking Conference (VNC 2016), Columbus, OH, USA, 8–10 December 2016; pp. 152–153. [Google Scholar] [CrossRef]
- Riebl, R. Vanetza, Open-Source Implementation of the ETSI ITS-G5 Protocol Stack. Available online: https://www.vanetza.org/ (accessed on 19 December 2020).
- ETSI. TS 102 636-3—V1.1.1. Intelligent Transport Systems (ITS); Vehicular Communications; GeoNetworking; Technical Report; ETSI: Sophia Antipolis CEDEX, France, 2010. [Google Scholar]
- ETSI. ETSI EN 302 637-2 V1.3.1. Intelligent Transport Systems (ITS); Vehicular Communications; Basic Set of Applications; Part 2: Specification of Cooperative Awareness Basic Service; Technical Report; ETSI: Sophia Antipolis CEDEX, France, 2014. [Google Scholar]
- ETSI. ETSI EN 302 637-3 V1.2.1. Intelligent Transport Systems (ITS); Vehicular Communications; Basic Set of Applications; Part 3: Specifications of Decentralized Environmental Notification Basic Service; Technical Report; ETSI: Sophia Antipolis CEDEX, France, 2014. [Google Scholar]
- Wireless, C. MK5 OBU. Available online: https://cohdawireless.com/solutions/hardware/mk5-obu/ (accessed on 29 December 2020).
- Klingler, F.; Pannu, G.S.; Sommer, C.; Bloessl, B.; Dressler, F. Poster: Field Testing Vehicular Networks Using OpenC2X. In Proceedings of the 15th Annual International Conference on Mobile Systems, Applications, and Services (MobiSys’17), Niagara Falls, NY, USA, 19–23 June 2017; p. 178. [Google Scholar] [CrossRef]
- Riebel, R.; Obermaier, C.; Neumeier, S.; Facchi, C. Vanetza: Boosting Research on Inter-Vehicle Communication. In Proceedings of the 5th GI/ITG KuVS Fachgespräch Inter-Vehicle Communication (FG-IVC 2017), Erlangen, Germany, 6–7 April 2017; pp. 37–40. [Google Scholar]
- 3GPP. LTE; Service Requirements for V2X Services (3GPP TS 22.185 Version 14.3.0 Release 14); Technical Report; 3GPP: Sophia Antipolis, France, 2017. [Google Scholar]
- ETSI. ETSI TS 102 940 V1.2.1—Intelligent Transport Systems (ITS); Security; ITS Communications Security Architecture and Security Management; Technical Report; ETSI: Sophia Antipolis CEDEX, France, 2016. [Google Scholar]
- Mahnke, W.; Leitner, S.H.; Damm, M. OPC Unified Architecture; Springer: Berlin, Germany, 2009. [Google Scholar] [CrossRef]
- Microsoft. Bing Maps Tile System. Available online: https://docs.microsoft.com/en-us/bingmaps/articles/bing-maps-tile-system (accessed on 16 December 2020).
- Lee, S.; Kim, H.; Hong, D.; Ju, H. Correlation analysis of MQTT loss and delay according to QoS level. In Proceedings of the International Conference on Information Networking 2013 (ICOIN), Bangkok, Thailand, 28–30 January 2013; pp. 714–717. [Google Scholar] [CrossRef]
- Naik, N. Choice of effective messaging protocols for IoT systems: MQTT, CoAP, AMQP and HTTP. In Proceedings of the 2017 IEEE International Systems Engineering Symposium (ISSE), Vienna, Austria, 11–13 October 2017; pp. 1–7. [Google Scholar] [CrossRef]









Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sedar, R.; Vázquez-Gallego, F.; Casellas, R.; Vilalta, R.; Muñoz, R.; Silva, R.; Dizambourg, L.; Fernández Barciela, A.E.; Vilajosana, X.; Datta, S.K.; et al. Standards-Compliant Multi-Protocol On-Board Unit for the Evaluation of Connected and Automated Mobility Services in Multi-Vendor Environments. Sensors 2021, 21, 2090. https://doi.org/10.3390/s21062090
Sedar R, Vázquez-Gallego F, Casellas R, Vilalta R, Muñoz R, Silva R, Dizambourg L, Fernández Barciela AE, Vilajosana X, Datta SK, et al. Standards-Compliant Multi-Protocol On-Board Unit for the Evaluation of Connected and Automated Mobility Services in Multi-Vendor Environments. Sensors. 2021; 21(6):2090. https://doi.org/10.3390/s21062090
Chicago/Turabian StyleSedar, Roshan, Francisco Vázquez-Gallego, Ramon Casellas, Ricard Vilalta, Raul Muñoz, Rodrigo Silva, Laurent Dizambourg, Antonio Eduardo Fernández Barciela, Xavier Vilajosana, Soumya Kanti Datta, and et al. 2021. "Standards-Compliant Multi-Protocol On-Board Unit for the Evaluation of Connected and Automated Mobility Services in Multi-Vendor Environments" Sensors 21, no. 6: 2090. https://doi.org/10.3390/s21062090
APA StyleSedar, R., Vázquez-Gallego, F., Casellas, R., Vilalta, R., Muñoz, R., Silva, R., Dizambourg, L., Fernández Barciela, A. E., Vilajosana, X., Datta, S. K., Härri, J., & Alonso-Zarate, J. (2021). Standards-Compliant Multi-Protocol On-Board Unit for the Evaluation of Connected and Automated Mobility Services in Multi-Vendor Environments. Sensors, 21(6), 2090. https://doi.org/10.3390/s21062090