
Swarm Robotics: A Perspective on the Latest Reviewed Concepts and Applications

 , , , , and
, , , , and
Abstract
1. Introduction
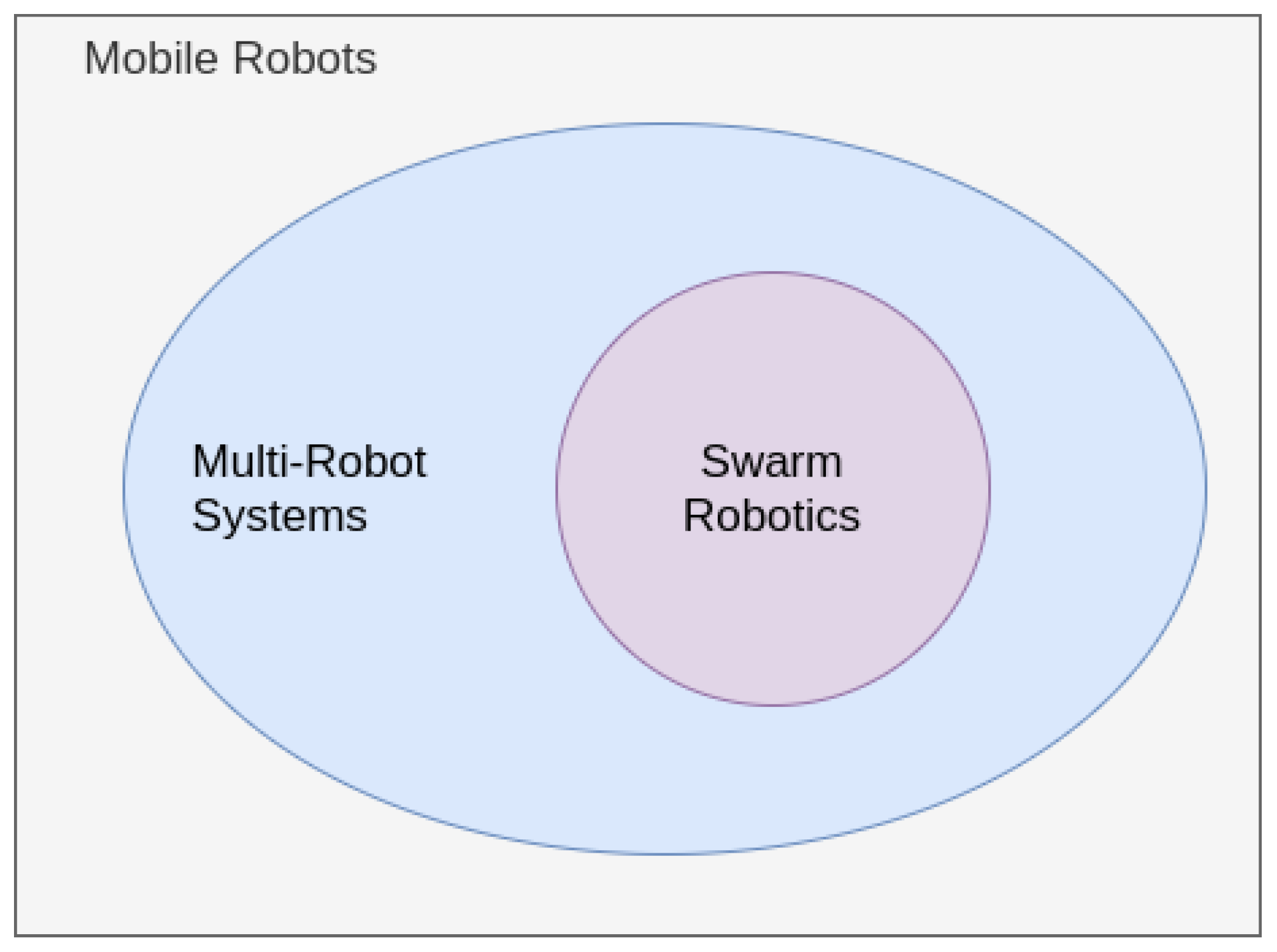
- An analysis of the inspirations and definitions of SR. This discussion also differentiates the concepts of mobile robots, multi-robot systems, and swarm robotics. Regarding this contribution, there is also a presentation of the main features of this field.
- An evaluation of several SR projects’ main features. This work accesses several robotics platforms, frameworks, simulators, and projects presented in the literature. With this information, we provide an overview of the most commonly used research tools.
- A presentation of the most basic behaviors and tasks in SR. We provide a general discussion regarding the techniques currently applied to solve the field problems with this analysis.
- A presentation of the applications that use SR. This discussion provides an overview of the importance of swarm robotics in multiple environments and applications.
2. Swarm Behaviors
3. Defining Swarm Robotics
3.1. Swarm Robotics Main Features
- In theory, the robots should all be equal. However, if not, the robotic swarm should be similar [33].
3.2. Differences between Swarm Robotics and Other Multi-Robot Systems
4. Swarm Robotic Projects
4.1. Robotic Plataforms
- Khepera was one of the first robotic projects, developed in the mid-1990 [40]. This robot was created by École Polytechnique Fédéralede Lausanne—(EPFL, Switzerland). Another version such as Khepera III [41] were launched during the next decade with some simulation programs. In a further version, Khepera IV is compounded by Linux Core running 800 MHz ARM Cortex-A8 Processor with 256 MB of RAM, an additional flashcard 512MB and 8GB for data and with 802.11 b/g Wi-Fi, Bluetooth 2.0 EDR, and 20 sensors [42].
- Alice was created by Gilles Caprari at Autonomous Systems Lab at EPFL as an enhancement from Khepera. It was a small and independent robot that became very popular due to its size and comparatively low-cost, enabling it possible to produce and manage a group of hundreds of robots concurrently [43,44].
- Kobot was created at the Middle East Technical University, Turkey [45]. Kobot is a movable robot equipped with some sensors. It was drawn to be used in various robotic research jobs, such as guided movement.
- E-puck [46] is a platform created to help engineering students at their class. The robots own an uncomplicated accurate structure effortless to comprehend, manage and preserve. The robots were as versatile, with many alternatives for more improvement and upgrading, whereby sensors, processors, and so on. This device is constantly under upgrade, and its last version is E-puck 2 (http://www.e-puck.org/index.php?option=com_content&view=article&id=55&Itemid=42, acessed on 3 March 2021).
- Jasmine was a public open hardware robot produced by the University of Stuttgart whose goal was to construct a low-cost and easy microrobot platform [47].
- Sambot is a robotic platform proposed by Wei et al. [48] as self-organizing swarms that link to form new structures. Self-organization happens through a moving docking mechanism.
- S-bot was a robotic prototype created by Mondada et al. [51] to generate a swarm robotics colony named SWARM-BOT. It features an ARM processor running Linux, omnidirectional cameras, infrared proximity sensors, light sensors, accelerometers, and actuators.
- AMiR is a platform for research and education on swarm robotics. Its low cost allows the creation of systems with many robots. The prototypes are equipped with infrared emitters and phototransistors to allow stigmergy [52].
- eSwarBot is a platform created to allow affordable research and experimentation using real robots. It is based on an Arduino microcontroller and specifically targets the educational and academic environments [57].
- Pheeno is a robot designed for flexible swarm robotics applications. It targets education, research, and outreach activities. This model features a 3-DoF gipper module, and infrared range sensors, a camera, and an Inertial Measurement Unit as sensors [58].
- Pi Swarm is a platform developed targeting research and education in swarm robotics. Its objectives include cost reduction and simplifying the platform programming, and tool-chain [59].
- microUSV is a small platform to validate marine swarm robotics appliances. It features 3D-printed parts and off-the-shelf components to compose its design [60].
- mROBerTO and mROBerTO 2.0 are robotic platforms with advanced computational and sensing abilities to create swarm robotics applications. The advances on this platform allowed the creation of platforms with more reliability and repeatable locomotion [61].
- Tribots are three-legged robots designed to reproduce complex strategies from ants, including the evasion from large predators. The robots are insect-scaled and easy to assemble. Nonetheless, it allows a set of five different movements [64].
- A primary CPU/MCU, responsible for the high-level robot intelligence. As stated before, swarm robotics usually have low-level intelligent tasks, as the intelligence is usually collective. Thus, usually, the platforms have low-power MCUs or embedded CPUs with constrained resources.
- Some solutions present auxiliary MCU modules. These modules are usually responsible for real-time tasks. There is no guarantee of real-time operations in more elaborated solutions, especially those using CPUs with embedded OSs. Thus, these auxiliary units control these low-level tasks.
- The robot context-awareness comes from the Sensors/Transducers. These devices include the communication modules, as collective intelligence is a critical feature in swarm robotics.
- The interaction with the environment and neighbors comes from the Actuators/Transducers. Again, the communication modules are also a part of this feature, as they have active participation in the communication and collective intelligence. For instance, many robots use IR LEDs and phototransistors to perform local communication.
- Sizes vary from microrobots of 1.6 cm (approximately 1 inch) to 23 cm. Nonetheless, all solutions can be considered low-size robots, as this feature is essential for the swarm’s scalability.
4.2. Robotic Simulators
- UberSim is a platform originally created to validate soccer robots [67]. This system relies on the ODE as its physics platform.
- Microsoft Robotics Studio (MSRS) is a framework based in Windows to simulate robotic units [72]. The physics simulator in this context was an external appliance created by Ageia.
- ARGoS is a simulator developed for multi-robot simulation [73]. This platform allows the usage of multiple physics engines, enabling the simulation of up to 10,000 e-puck in 60% of the time taken in a real-world experiment.
- Simbad is an autonomous robot simulation package [76]. It enables various methods of single or multi-robot simulation using a Java-based platform.
- RoboNetSim is a framework for multi-robot and network simulation [77]. This platform is based on ARGoS, with added network simulators.
- JBotEvolver is a platform to enhance research and education in evolutionary robotics [80]. This platform is based in Java, with easy installation and use.
- CoppeliaSim, which was previously named V-Rep, is a mobile robots simulation framework [81]. This platform allows the simulation of several aspects of multiple robots inside a defined environment.
4.3. Architectures and Frameworks
- Aerostack is an example of architecture and software framework developed for UAV/UAS SR applications [91]. The onboard application has modules to control real-time and non-real-time tasks. The collective architecture considers modules that target the most relevant tasks in the context of each SR unit.
- ARCog is a cognitive-based architecture designed to surface inspections in large scale [92]. The decision process happens through a supervising agent that attends solicitations from each unit throughout the execution time.
- ALLIANCE is a software architecture designed to facilitate the control of heterogeneous SR applications [93]. Internally, each unit has a set of high-level functions to perform designed tasks, using information from internal states, other robots, and environmental conditions.
- CoMPACT presented a hierarchical architecture to control UAV swarms [94]. This proposal combines mission-planning tasks with dynamic reassignment, motion planning, and swarm behaviors.
5. Basic Behaviors and Tasks in Swarm Robotics
5.1. Aggregation
Distributed and Reinforcement Learning
5.2. Direct Communication
Stigmergy
5.3. Dispersion
5.4. Pattern Formation
5.5. Collective Movement
- the agents use merely one-hop neighbor knowledge;
- the agents keep connectivity network topology through knowledge swap;
- the agents keep a requested neighboring distance;
- the agents are sufficient to go through obstructions without splitting the agent swarm. The authors emphasize the fundamental idea is to add an orientating force and a topology force inside the process. The orientating force is employed to conduct the agents to their destiny place over the predefined path. According to the authors, it guarantees that the agents proceed to budge up to arrive at their destiny place. The topology force is employed to keep a “decent” topology of the swarm, such as to preserve connectivity of network topology and the required distance among the neighboring agents.
- no obstructions or no chiefs;
- no obstructions with a chief;
- with obstructions with or without chiefs.
- the algorithms perform all the requisites;
- the algorithms are free to GPS and robot faults.
- the algorithms’ self-adjusting control create a network topologies further solid and spare travel time of agents.
5.6. Task Allocation
5.7. Source Search
5.8. Collective Transport of Objects
5.9. Collective Mapping
6. Applications Using Swarm Robotics
6.1. Marine Environmental Control
6.2. Autonomous Aerial Tasks
6.3. Industry 4.0
6.4. Farming
6.5. Civil Construction
6.6. Space Exploration Tasks
7. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Conflicts of Interest
Abbreviations
| SR | Swarm Robotics |
| SI | Swarm Intelligence |
| MRS | Multi-Robotic Systems |
| MR | Mobile Robotics |
| DM-KNN | Minkowski distance function |
| GA | Genetic Algorithm |
| RDPSO | Robotic Darwin PSO |
| UAV | Unmanned Aerial Vehicle |
| UAS | Unmanned Aerial System |
References
- Hinchey, M.G.; Sterritt, R.; Rouff, C. Swarms and swarm intelligence. Computer 2007, 40, 111–113. [Google Scholar] [CrossRef]
- Brambilla, M.; Ferrante, E.; Birattari, M.; Dorigo, M. Swarm robotics: A review from the swarm engineering perspective. Swarm Intell. 2013, 7, 1–41. [Google Scholar] [CrossRef]
- Woolley, A.W.; Aggarwal, I.; Malone, T.W. Collective intelligence and group performance. Curr. Dir. Psychol. Sci. 2015, 24, 420–424. [Google Scholar] [CrossRef]
- Bonabeau, E.; Marco, D.D.R.D.F.; Dorigo, M.; Théraulaz, G.; Theraulaz, G. Swarm Intelligence: From Natural to Artificial Systems; Number 1; Oxford University Press: Oxford, UK, 1999. [Google Scholar]
- Blum, C.; Li, X. Swarm intelligence in optimization. In Swarm Intelligence; Springer: Berlin/Heidelberg, Germany, 2008; pp. 43–85. [Google Scholar]
- Şahin, E. Swarm robotics: From sources of inspiration to domains of application. In Proceedings of the International Workshop on Swarm Robotics, Santa Monica, CA, USA, 17 July 2004; pp. 10–20. [Google Scholar]
- Dorigo, M.; Birattari, M.; Brambilla, M. Swarm robotics. Scholarpedia 2014, 9, 1463. [Google Scholar] [CrossRef]
- Garattoni, L.; Birattari, M. Swarm robotics. In Wiley Encyclopedia of Electrical and Electronics Engineering; Wiley-Interscience: Hoboken, NJ, USA, 2016. [Google Scholar]
- Hamann, H.; Schmickl, T. Modelling the swarm: Analysing biological and engineered swarm systems. Math. Comput. Model. Dyn. Syst. 2012, 18, 1–12. [Google Scholar] [CrossRef]
- Trianni, V.; Campo, A. Fundamental collective behaviors in swarm robotics. In Springer Handbook of Computational Intelligence; Springer: Berlin/Heidelberg, Germany, 2015; pp. 1377–1394. [Google Scholar]
- Correll, N.; Hamann, H. Probabilistic modeling of swarming systems. In Springer Handbook of Computational Intelligence; Springer: Berlin/Heidelberg, Germany, 2015; pp. 1423–1432. [Google Scholar]
- Hamann, H. Swarm Robotics: A Formal Approach; Springer: Berlin/Heidelberg, Germany, 2018. [Google Scholar]
- Navarro, I.; Matía, F. An introduction to swarm robotics. ISRN Robot. 2013. [Google Scholar] [CrossRef]
- Nedjah, N.; Junior, L.S. Review of methodologies and tasks in swarm robotics towards standardization. Swarm Evol. Comput. 2019, 50, 100565. [Google Scholar] [CrossRef]
- Bayındır, L. A review of swarm robotics tasks. Neurocomputing 2016, 172, 292–321. [Google Scholar] [CrossRef]
- Beni, G. From swarm intelligence to swarm robotics. In Proceedings of the International Workshop on Swarm Robotic, Santa Monica, CA, USA, 17 July 2004; pp. 1–9. [Google Scholar]
- Farooq, M.; Caro, G.A.D. Routing Protocols for Next-Generation Networks Inspired by Collective Behaviors of Insect Societies: An Overview. In Natural Computing Series; Springer: Berlin/Heidelberg, Germany, 2008; pp. 101–160. [Google Scholar] [CrossRef]
- Lu, J.; Liu, J.; Couzin, I.D.; Levin, S.A. Emerging collective behaviors of animal groups. In Proceedings of the 2008 7th World Congress on Intelligent Control and Automation, Chongqing, China, 27–25 June 2008; pp. 1060–1065. [Google Scholar]
- Giardina, I. Collective behavior in animal groups: Theoretical models and empirical studies. HFSP J. 2008, 2, 205–219. [Google Scholar] [CrossRef]
- Couzin, I.D. Collective cognition in animal groups. Trends Cogn. Sci. 2009, 13, 36–43. [Google Scholar] [CrossRef]
- Puliafito, A.; Hufnagel, L.; Neveu, P.; Streichan, S.; Sigal, A.; Fygenson, D.K.; Shraiman, B.I. Collective and single cell behavior in epithelial contact inhibition. Proc. Natl. Acad. Sci. USA 2012, 109, 739–744. [Google Scholar] [CrossRef]
- Couzin, I.D.; Krause, J. Self-organization and collective behavior in vertebrates. Adv. Study Behav. 2003, 32, 10–1016. [Google Scholar]
- Janson, S.; Merkle, D.; Middendorf, M. A decentralization approach for swarm intelligence algorithms in networks applied to multi swarm PSO. Int. J. Intell. Comput. Cybern. 2008, 1, 25–45. [Google Scholar] [CrossRef]
- Garnier, S.; Gautrais, J.; Theraulaz, G. The biological principles of swarm intelligence. Swarm Intell. 2007, 1, 3–31. [Google Scholar] [CrossRef]
- Tan, Y.; Zheng, Z.Y. Research advance in swarm robotics. Def. Technol. 2013, 9, 18–39. [Google Scholar] [CrossRef]
- Nehmzow, U. Mobile Robotics: A Practical Introduction; Springer Science & Business Media: Berlin/Heidelberg, Germany, 2012. [Google Scholar]
- Osaba, E.; Del Ser, J.; Iglesias, A.; Yang, X.S. Soft Computing for Swarm Robotics: New Trends and Applications; Elsevier: Amsterdam, The Netherlands, 2020. [Google Scholar]
- Yang, H.a.; Cao, S.; Bai, L.; Zhang, Z.; Kong, J. A distributed and parallel self-assembly approach for swarm robotics. Robot. Auton. Syst. 2019, 118, 80–92. [Google Scholar] [CrossRef]
- Li, J.; Tan, Y. A probabilistic finite state machine based strategy for multi-target search using swarm robotics. Appl. Soft Comput. 2019, 77, 467–483. [Google Scholar] [CrossRef]
- Singh, P.K.; Singh, R.; Nandi, S.K.; Ghafoor, K.Z.; Rawat, D.B.; Nandi, S. An efficient blockchain-based approach for cooperative decision making in swarm robotics. Internet Technol. Lett. 2020, 3, e140. [Google Scholar] [CrossRef]
- Ali, S.; Khan, Z.; Din, A.; HASSAN, M.U. Investigation on communication aspects of multiple swarm networked robotics. Turk. J. Electr. Eng. Comput. Sci. 2019, 27, 2010–2020. [Google Scholar] [CrossRef]
- Cambier, N.; Miletitch, R.; Frémont, V.; Dorigo, M.; Ferrante, E.; Trianni, V. Language Evolution in Swarm Robotics: A Perspective. Front. Robot. AI 2020, 7, 12. [Google Scholar] [CrossRef]
- Chattopadhyay, I.; Ray, A. Supervised self-organization of homogeneous swarms using ergodic projections of Markov chains. IEEE Trans. Syst. Man, Cybern. Part B (Cybernetics) 2009, 39, 1505–1515. [Google Scholar] [CrossRef]
- Rizk, Y.; Awad, M.; Tunstel, E.W. Cooperative heterogeneous multi-robot systems: A survey. ACM Comput. Surv. (CSUR) 2019, 52, 1–31. [Google Scholar] [CrossRef]
- Su, H.; Zhang, J.; Zeng, Z. Formation-containment control of multi-robot systems under a stochastic sampling mechanism. Sci. China Technol. Sci. 2020, 63, 1025–1034. [Google Scholar] [CrossRef]
- Yu, H.; Shi, P.; Lim, C.C.; Wang, D. Formation control for multi-robot systems with collision avoidance. Int. J. Control 2019, 92, 2223–2234. [Google Scholar] [CrossRef]
- Leofante, F.; Ábrahám, E.; Niemueller, T.; Lakemeyer, G.; Tacchella, A. Integrated synthesis and execution of optimal plans for multi-robot systems in logistics. Inf. Syst. Front. 2019, 21, 87–107. [Google Scholar] [CrossRef]
- Khalastchi, E.; Kalech, M. Fault Detection and Diagnosis in Multi-Robot Systems: A Survey. Sensors 2019, 19, 4019. [Google Scholar] [CrossRef] [PubMed]
- Notomista, G.; Mayya, S.; Hutchinson, S.; Egerstedt, M. An optimal task allocation strategy for heterogeneous multi-robot systems. In Proceedings of the 2019 18th European Control Conference (ECC), Naples, Italy, 25–28 June 2019; pp. 2071–2076. [Google Scholar]
- Mondada, F.; Franzi, E.; Guignard, A. The development of khepera. Experiments with the Mini-Robot Khepera. In Proceedings of the First International Khepera Workshop, Paderborn, Germany, 10–11 December 1999; pp. 7–14. [Google Scholar]
- Pugh, J.; Raemy, X.; Favre, C.; Falconi, R.; Martinoli, A. A fast onboard relative positioning module for multirobot systems. IEEE/ASME Trans. Mechatron. 2009, 14, 151–162. [Google Scholar] [CrossRef]
- Soares, J.M.; Navarro, I.; Martinoli, A. The Khepera IV mobile robot: Performance evaluation, sensory data and software toolbox. In Proceedings of the Robot 2015: Second Iberian Robotics Conference, Lisbon, Portugal, 19–21 November 2015; pp. 767–781. [Google Scholar]
- Caprari, G.; Estier, T.; Siegwart, R. Fascination of down scaling-Alice the sugar cube robot. J. Micromechatron. 2001, 1, 177–189. [Google Scholar] [CrossRef]
- Caprari, G.; Siegwart, R. Mobile micro-robots ready to use: Alice. In Proceedings of the 2005 IEEE/RSJ International Conference on Intelligent Robots and Systems, Edmonton, AB, Canada, 2–6 August 2005; pp. 3295–3300. [Google Scholar]
- Turgut, A.E.; Çelikkanat, H.; Gökçe, F.; Şahin, E. Self-organized flocking in mobile robot swarms. Swarm Intell. 2008, 2, 97–120. [Google Scholar] [CrossRef]
- Mondada, F.; Bonani, M.; Raemy, X.; Pugh, J.; Cianci, C.; Klaptocz, A.; Magnenat, S.; Zufferey, J.C.; Floreano, D.; Martinoli, A. The e-puck, a robot designed for education in engineering. In Proceedings of the 9th Conference on Autonomous Robot Systems and Competitions, Branco, Portugal, 7 May 2009; IPCB: Castelo Branco, Portugal, 2009; Volume 1, pp. 59–65. [Google Scholar]
- Kornienko, S.; Kornienko, O.; Levi, P. Collective AI: Context awareness via communication. In Proceedings of the IJCAI, Scotland, UK, 30 July–5 August 2005; Volume 5, pp. 1464–1470. [Google Scholar]
- Wei, H.; Chen, Y.; Tan, J.; Wang, T. Sambot: A self-assembly modular robot system. IEEE/ASME Trans. Mechatron. 2010, 16, 745–757. [Google Scholar] [CrossRef]
- Seyfried, J.; Szymanski, M.; Bender, N.; Estaña, R.; Thiel, M.; Wörn, H. The I-SWARM project: Intelligent small world autonomous robots for micro-manipulation. In Proceedings of the International Workshop on Swarm Robotics, Monica, CA, USA, 17 July 2004; pp. 70–83. [Google Scholar]
- Valdastri, P.; Corradi, P.; Menciassi, A.; Schmickl, T.; Crailsheim, K.; Seyfried, J.; Dario, P. Micromanipulation, communication and swarm intelligence issues in a swarm microrobotic platform. Robot. Auton. Syst. 2006, 54, 789–804. [Google Scholar] [CrossRef]
- Mondada, F.; Guignard, A.; Bonani, M.; Bar, D.; Lauria, M.; Floreano, D. Swarm-bot: From concept to implementation. In Proceedings of the 2003 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2003) (Cat. No. 03CH37453), Las Vegas, NV, USA, 27–31 October 2003; Volume 2, pp. 1626–1631. [Google Scholar]
- Arvin, F.; Samsudin, K.; Ramli, A.R. Development of a miniature robot for swarm robotic application. Int. J. Comput. Electr. Eng. 2009, 1, 436–442. [Google Scholar] [CrossRef]
- Arvin, F.; Murray, J.; Zhang, C.; Yue, S. Colias: An autonomous micro robot for swarm robotic applications. Int. J. Adv. Robot. Syst. 2014, 11, 113. [Google Scholar] [CrossRef]
- Arvin, F.; Krajník, T.; Turgut, A.E.; Yue, S. COSΦ: Artificial pheromone system for robotic swarms research. In Proceedings of the 2015 IEEE/RSJ international conference on intelligent robots and systems (IROS), Vancouver, BC, Canada, 24–28 September 2015; pp. 407–412. [Google Scholar]
- Hu, C.; Fu, Q.; Yue, S. Colias IV: The affordable micro robot platform with bio-inspired vision. In Proceedings of the Annual Conference Towards Autonomous Robotic Systems, Bristol, UK, 25–27 July 2018; pp. 197–208. [Google Scholar]
- Sun, X.; Liu, T.; Hu, C.; Fu, Q.; Yue, S. ColCOS φ: A multiple pheromone communication system for swarm robotics and social insects research. In Proceedings of the 2019 IEEE 4th International Conference on Advanced Robotics and Mechatronics (ICARM), Toyonaka, Japan, 3–5 July 2019; pp. 59–66. [Google Scholar]
- Couceiro, M.S.; Figueiredo, C.M.; Luz, J.M.A.; Ferreira, N.M.; Rocha, R.P. A Low-Cost Educational Platform for Swarm Robotics. Int. J. Robot. Educ. Art 2012, 2, 1–15. [Google Scholar]
- Wilson, S.; Gameros, R.; Sheely, M.; Lin, M.; Dover, K.; Gevorkyan, R.; Haberland, M.; Bertozzi, A.; Berman, S. Pheeno, a versatile swarm robotic research and education platform. IEEE Robot. Autom. Lett. 2016, 1, 884–891. [Google Scholar] [CrossRef]
- Hilder, J.; Naylor, R.; Rizihs, A.; Franks, D.; Timmis, J. The pi swarm: A low-cost platform for swarm robotics research and education. In Proceedings of the Conference Towards Autonomous Robotic Systems, Birmingham, UK, 1–3 September 2014; pp. 151–162. [Google Scholar]
- Gregory, C.; Vardy, A. microUSV: A low-cost platform for indoor marine swarm robotics research. HardwareX 2020, 7, e00105. [Google Scholar] [CrossRef]
- Eshaghi, K.; Li, Y.; Kashino, Z.; Nejat, G.; Benhabib, B. mROBerTO 2.0–An Autonomous Millirobot With Enhanced Locomotion for Swarm Robotics. IEEE Robot. Autom. Lett. 2020, 5, 962–969. [Google Scholar] [CrossRef]
- Rubenstein, M.; Ahler, C.; Nagpal, R. Kilobot: A low cost scalable robot system for collective behaviors. In Proceedings of the 2012 IEEE International Conference on Robotics and Automation, Saint Paul, MN, USA, 14–18 May 2012; pp. 3293–3298. [Google Scholar]
- Rubenstein, M.; Ahler, C.; Hoff, N.; Cabrera, A.; Nagpal, R. Kilobot: A low cost robot with scalable operations designed for collective behaviors. Robot. Auton. Syst. 2014, 62, 966–975. [Google Scholar] [CrossRef]
- Zhakypov, Z.; Mori, K.; Hosoda, K.; Paik, J. Designing minimal and scalable insect-inspired multi-locomotion millirobots. Nature 2019, 571, 381–386. [Google Scholar] [CrossRef]
- Rusu, R.B.; Maldonado, A.; Beetz, M.; Gerkey, B. Extending Player/Stage/Gazebo towards cognitive robots acting in ubiquitous sensor-equipped environments. In Proceedings of the International Conference on Robotics and Automation (ICRA) Workshop for Network Robot Systems, Roma, Italy, 10–14 April 2007. [Google Scholar]
- Gerkey, B.; Vaughan, R.T.; Howard, A. The player/stage project: Tools for multi-robot and distributed sensor systems. In Proceedings of the 11th International Conference on Advanced Robotics, Coimbra, Portuga, 30 June–3 July 2003; Volume 1, pp. 317–323. [Google Scholar]
- Browning, B.; Tryzelaar, E. Ubersim: A realistic simulation engine for robot soccer. In Proceedings of the Autonomous Agents and Multi-Agent Systems, AAMAS’03, Auckland, New Zealand, 9–13 May 2003. [Google Scholar]
- Carpin, S.; Lewis, M.; Wang, J.; Balakirsky, S.; Scrapper, C. USARSim: A robot simulator for research and education. In Proceedings of the 2007 IEEE International Conference on Robotics and Automation, Rome, Italy, 10–14 April 2007; pp. 1400–1405. [Google Scholar]
- Balakirsky, S.; Kootbally, Z. Usarsim/ros: A combined framework for robotic control and simulation. In Proceedings of the International Symposium on Flexible Automation, St. Louis, MI, USA, 18–20 June 2012; Volume 45110, pp. 101–108. [Google Scholar]
- Pettinaro, G.C.; Kwee, I.W.; Gambardella, L.M. Swarmbot3D User Manual, Technical Report No. IDSIA-22-03; IDSIA: Manno, Switzerland, 2003. [Google Scholar]
- Pettinaro, G.C.; Kwee, I.W.; Gambardella, L.M. Definition, Implementation, and Calibration of the Swarmbot3d Simulator; Technical Report No. IDSIA-21-03; IDSIA: Manno, Switzerland, 2003; pp. 7–10. [Google Scholar]
- Jackson, J. Microsoft robotics studio: A technical introduction. IEEE Robot. Autom. Mag. 2007, 14, 82–87. [Google Scholar] [CrossRef]
- Pinciroli, C.; Trianni, V.; O’Grady, R.; Pini, G.; Brutschy, A.; Brambilla, M.; Mathews, N.; Ferrante, E.; Di Caro, G.; Ducatelle, F.; et al. ARGoS: A modular, parallel, multi-engine simulator for multi-robot systems. Swarm Intell. 2012, 6, 271–295. [Google Scholar] [CrossRef]
- Valentini, G.; Antoun, A.; Trabattoni, M.; Wiandt, B.; Tamura, Y.; Hocquard, E.; Trianni, V.; Dorigo, M. Kilogrid: A novel experimental environment for the Kilobot robot. Swarm Intell. 2018, 12, 245–266. [Google Scholar] [CrossRef]
- Antoun, A.; Valentini, G.; Hocquard, E.; Wiandt, B.; Trianni, V.; Dorigo, M. Kilogrid: A modular virtualization environment for the kilobot robot. In Proceedings of the 2016 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Daejeon, Korea, 9–14 October 2016; pp. 3809–3814. [Google Scholar]
- Hugues, L.; Bredeche, N. Simbad: An autonomous robot simulation package for education and research. In Proceedings of the International Conference on Simulation of Adaptive Behavior, Daejeon, Korea, 9–14 October 2006; pp. 831–842. [Google Scholar]
- Kudelski, M.; Gambardella, L.M.; Di Caro, G.A. RoboNetSim: An integrated framework for multi-robot and network simulation. Robot. Auton. Syst. 2013, 61, 483–496. [Google Scholar] [CrossRef]
- Michel, O. Cyberbotics Ltd. Webots™: Professional mobile robot simulation. Int. J. Adv. Robot. Syst. 2004, 1, 5. [Google Scholar] [CrossRef]
- Scott, A.F.; Yu, C. Cooperative multi-agent mapping and exploration in Webots®. In Proceedings of the 2009 4th International Conference on Autonomous Robots and Agents, Wellington, New Zealand, 10–12 February 2009; pp. 56–61. [Google Scholar]
- Duarte, M.; Silva, F.; Rodrigues, T.; Moura Oliveira, S.; Christensen, A. JBotEvolver: A Versatile Simulation Program for Evolutionary Robotics. In Artificial Life 14; Proceedings of the Fourteenth International Conference on the Synthesis and Simulation of Living Systems, New York, NY, USA, 30 July–2 August 2014; MIT Press: Cambridge, MA, USA, 2014; pp. 210–211. [Google Scholar]
- Rohmer, E.; Singh, S.; Freese, M. Coppeliasim (formerly v-rep): A versatile and scalable robot simulation framework. In Proceedings of the 2013 IEEE/RSJ International Conference on Intelligent Robots and Systems, Tokyo, Japan, 3–7 November 2013. [Google Scholar]
- Chen, W.; Liu, B.; Huang, H.; Guo, S.; Zheng, Z. When UAV swarm meets edge-cloud computing: The QoS perspective. IEEE Netw. 2019, 33, 36–43. [Google Scholar] [CrossRef]
- Wan, S.; Gu, Z.; Ni, Q. Cognitive computing and wireless communications on the edge for healthcare service robots. Comput. Commun. 2020, 149, 99–106. [Google Scholar] [CrossRef]
- Ivanov, D. Fog robotics distributed computing in a monitoring task. In Proceedings of the Computer Science On-line Conference, Zlin, Czech Republic, 24–27 April 2020; pp. 554–562. [Google Scholar]
- Hou, X.; Ren, Z.; Wang, J.; Zheng, S.; Cheng, W.; Zhang, H. Distributed fog computing for latency and reliability guaranteed swarm of drones. IEEE Access 2020, 8, 7117–7130. [Google Scholar] [CrossRef]
- Secinti, G.; Trotta, A.; Mohanti, S.; Di Felice, M.; Chowdhury, K.R. FOCUS: Fog computing in UAS software-defined mesh networks. IEEE Trans. Intell. Transp. Syst. 2019, 21, 2664–2674. [Google Scholar] [CrossRef]
- Chen, Y.; Du, Z.; Garcia-Acosta, M. Robot as a service in cloud computing. In Proceedings of the 2010 Fifth IEEE International Symposium on Service Oriented System Engineering, Nanjing, China, 4–5 June 2010; pp. 151–158. [Google Scholar]
- He, H.; Kamburugamuve, S.; Fox, G.C.; Zhao, W. Cloud based real-time multi-robot collision avoidance for swarm robotics. Int. J. Grid Distrib. Comput. 2016, 9, 339–358. [Google Scholar] [CrossRef]
- Turnbull, L.; Samanta, B. Cloud robotics: Formation control of a multi robot system utilizing cloud infrastructure. In Proceedings of the 2013 Proceedings of IEEE Southeastcon, Jacksonville, FL, USA, 4–7 April 2013; pp. 1–4. [Google Scholar]
- Queralta, J.P.; Qingqing, L.; Gia, T.N.; Truong, H.L.; Westerlund, T. End-to-end design for self-reconfigurable heterogeneous robotic swarms. In Proceedings of the 2020 16th International Conference on Distributed Computing in Sensor Systems (DCOSS), Marina del Rey, CA, USA, 25–27 May 2020; pp. 281–287. [Google Scholar]
- Sanchez-Lopez, J.L.; Fernández, R.A.S.; Bavle, H.; Sampedro, C.; Molina, M.; Pestana, J.; Campoy, P. Aerostack: An architecture and open-source software framework for aerial robotics. In Proceedings of the 2016 International Conference on Unmanned Aircraft Systems (ICUAS), Marriott, VA, USA, 7–10 June 2016; pp. 332–341. [Google Scholar]
- Pinto, M.F.; Honorio, L.M.; Melo, A.; Marcato, A.L. A Robotic Cognitive Architecture for Slope and Dam Inspections. Sensors 2020, 20, 4579. [Google Scholar] [CrossRef] [PubMed]
- Parker, L.E. ALLIANCE: An architecture for fault tolerant multirobot cooperation. IEEE Trans. Robot. Autom. 1998, 14, 220–240. [Google Scholar] [CrossRef]
- Boskovic, J.; Knoebel, N.; Moshtagh, N.; Amin, J.; Larson, G. Collaborative mission planning & autonomous control technology (compact) system employing swarms of uavs. In Proceedings of the AIAA Guidance, Navigation, and Control Conference, Chicago, IL, USA, 10–13 August 2009; p. 5653. [Google Scholar]
- Firat, Z.; Ferrante, E.; Gillet, Y.; Tuci, E. On self-organised aggregation dynamics in swarms of robots with informed robots. Neural Comput. Appl. 2020, 32, 13825–13841. [Google Scholar] [CrossRef]
- Khaldi, B.; Harrou, F.; Cherif, F.; Sun, Y. Improving robots swarm aggregation performance through the Minkowski distance function. In Proceedings of the 2020 6th International Conference on Mechatronics and Robotics Engineering (ICMRE), Barcelona, Spain, 12–15 February 2020; pp. 87–91. [Google Scholar]
- Mısır, O.; Gökrem, L.; Can, M.S. Fuzzy-based self organizing aggregation method for swarm robots. Biosystems 2020, 196, 104187. [Google Scholar] [CrossRef] [PubMed]
- Shah, D.; Vachhani, L. Swarm aggregation without communication and global positioning. IEEE Robot. Autom. Lett. 2019, 4, 886–893. [Google Scholar] [CrossRef]
- Hüttenrauch, M.; Adrian, S.; Neumann, G. Deep reinforcement learning for swarm systems. J. Mach. Learn. Res. 2019, 20, 1–31. [Google Scholar]
- Sartoretti, G.; Wu, Y.; Paivine, W.; Kumar, T.S.; Koenig, S.; Choset, H. Distributed reinforcement learning for multi-robot decentralized collective construction. In Distributed Autonomous Robotic Systems; Springer: Berlin/Heidelberg, Germany, 2019; pp. 35–49. [Google Scholar]
- Wai, H.T.; Yang, Z.; Wang, Z.; Hong, M. Multi-agent reinforcement learning via double averaging primal-dual optimization. arXiv 2018, arXiv:1806.00877. [Google Scholar]
- Di Mario, E.; Navarro, I.; Martinoli, A. Distributed learning of cooperative robotic behaviors using particle swarm optimization. In Proceedings of the Experimental Robotics, Tokyo, Japan, 3–6 October 2016; pp. 591–604. [Google Scholar]
- Akrour, R.; Schoenauer, M.; Sebag, M. April: Active preference learning-based reinforcement learning. In Proceedings of the Joint European Conference on Machine Learning and Knowledge Discovery in Databases, Bristol, UK, 24–28 September 2012; pp. 116–131. [Google Scholar]
- Hüttenrauch, M.; Šošić, A.; Neumann, G. Local communication protocols for learning complex swarm behaviors with deep reinforcement learning. In Proceedings of the International Conference on Swarm Intelligence, Rome, Italy, 29–31 October 2018; pp. 71–83. [Google Scholar]
- Li, Y.; Klingner, J.; Correll, N. Distributed camouflage for swarm robotics and smart materials. Auton. Robot. 2018, 42, 1635–1650. [Google Scholar] [CrossRef]
- De Nicola, R.; Di Stefano, L.; Inverso, O. Multi-agent systems with virtual stigmergy. In Proceedings of the Federation of International Conferences on Software Technologies: Applications and Foundations, Toulouse, France, 25–29 June 2018; pp. 351–366. [Google Scholar]
- Tang, Q.; Xu, Z.; Yu, F.; Zhang, Z.; Zhang, J. Dynamic target searching and tracking with swarm robots based on stigmergy mechanism. Robot. Auton. Syst. 2019, 120, 103251. [Google Scholar] [CrossRef]
- Tang, Q.; Yu, F.; Zhang, Y.; Ding, L.; Eberhard, P. A stigmergy based search method for swarm robots. In Proceedings of the International Conference on Swarm Intelligence, Fukuoka, Japan, 27 July 2017; pp. 199–209. [Google Scholar]
- Bayert, J.; Khorbotly, S. Robotic Swarm Dispersion Using Gradient Descent Algorithm. In Proceedings of the 2019 IEEE International Symposium on Robotic and Sensors Environments (ROSE), Ottawa, ON, Canada, 17–18 June 2019; pp. 1–6. [Google Scholar]
- Florea, A.G.; Buiu, C. Synchronized dispersion of robotic swarms using XP colonies. In Proceedings of the 2016 8th International Conference on Electronics, Computers and Artificial Intelligence (ECAI), Ploiesti, Romania, 30 June–2 July 2016; pp. 1–6. [Google Scholar]
- Kshemkalyani, A.D.; Molla, A.R.; Sharma, G. Dispersion of Mobile Robots on Grids. In Proceedings of the International Workshop on Algorithms and Computation, Singapore, 31 March–2 April 2020; pp. 183–197. [Google Scholar]
- Novischi, D.M.; Florea, A.M. Decentralized Swarm Aggregation and Dispersion with Inter-Member Collision Avoidance for Non-holonomic Multi-Robot Systems. In Proceedings of the 2018 IEEE 14th International Conference on Intelligent Computer Communication and Processing (ICCP), Cluj-Napoca, Romania, 6–8 September 2018; pp. 89–95. [Google Scholar]
- Coppola, M.; Guo, J.; Gill, E.; de Croon, G.C. Provable self-organizing pattern formation by a swarm of robots with limited knowledge. Swarm Intell. 2019, 13, 59–94. [Google Scholar] [CrossRef]
- Li, G.; St-Onge, D.; Pinciroli, C.; Gasparri, A.; Garone, E.; Beltrame, G. Decentralized progressive shape formation with robot swarms. Auton. Robot. 2019, 43, 1505–1521. [Google Scholar] [CrossRef]
- Queralta, J.P.; McCord, C.; Gia, T.N.; Tenhunen, H.; Westerlund, T. Communication-free and index-free distributed formation control algorithm for multi-robot systems. Procedia Comput. Sci. 2019, 151, 431–438. [Google Scholar] [CrossRef]
- Wang, H.; Rubenstein, M. Shape Formation in Homogeneous Swarms Using Local Task Swapping. IEEE Trans. Robot. 2020, 36, 597–612. [Google Scholar] [CrossRef]
- Talamali, M.S.; Bose, T.; Haire, M.; Xu, X.; Marshall, J.A.; Reina, A. Sophisticated collective foraging with minimalist agents: A swarm robotics test. Swarm Intell. 2020, 14, 25–56. [Google Scholar] [CrossRef]
- Yamagishi, K.; Suzuki, T. Collective movement method for swarm robot based on a thermodynamic model. Int. J. Adv. Comput. Sci. Appl. 2017, 8, 513–519. [Google Scholar] [CrossRef]
- Scholz, C.; Engel, M.; Pöschel, T. Rotating robots move collectively and self-organize. Nat. Commun. 2018, 9, 1–8. [Google Scholar] [CrossRef]
- Zhao, H.; Liu, H.; Leung, Y.W.; Chu, X. Self-adaptive collective motion of swarm robots. IEEE Trans. Autom. Sci. Eng. 2018, 15, 1533–1545. [Google Scholar] [CrossRef]
- Harwell, J.; Lowmanstone, L.; Gini, M. Demystifying Emergent Intelligence and Its Effect on Performance In Large Robot Swarms. In Proceedings of the 19th International Conference on Autonomous Agents and MultiAgent Systems, Auckland, New Zealand, 9–13 May 2020; pp. 474–482. [Google Scholar]
- Khaluf, Y.; Vanhee, S.; Simoens, P. Local ant system for allocating robot swarms to time-constrained tasks. J. Comput. Sci. 2019, 31, 33–44. [Google Scholar] [CrossRef]
- Lee, W.; Vaughan, N.; Kim, D. Task Allocation Into a Foraging Task With a Series of Subtasks in Swarm Robotic System. IEEE Access 2020, 8, 107549–107561. [Google Scholar] [CrossRef]
- Hung, P.D.; La, H.M.; Ngo, T.D. Adaptive hierarchical distributed control with cooperative task allocation for robot swarms. In Proceedings of the 2020 IEEE/SICE International Symposium on System Integration (SII), Honolulu, HI, USA, 12–15 January 2020; pp. 1300–1305. [Google Scholar]
- Liu, Z.; West, C.; Lennox, B.; Arvin, F. Local Bearing Estimation for a Swarm of Low-Cost Miniature Robots. Sensors 2020, 20, 3308. [Google Scholar] [CrossRef] [PubMed]
- Renzaglia, A.; Briñón-Arranz, L. Search and Localization of a Weak Source with a Multi-robot Formation. J. Intell. Robot. Syst. 2020, 97, 623–634. [Google Scholar] [CrossRef]
- Dadgar, M.; Couceiro, M.S.; Hamzeh, A. RbRDPSO: Repulsion-Based RDPSO for Robotic Target Searching. Iran. J. Sci. Technol. Trans. Electr. Eng. 2020, 44, 551–563. [Google Scholar] [CrossRef]
- Jain, U.; Tiwari, R.; Godfrey, W.W. Multiple odor source localization using diverse-PSO and group-based strategies in an unknown environment. J. Comput. Sci. 2019, 34, 33–47. [Google Scholar] [CrossRef]
- Ebel, H.; Luo, W.; Yu, F.; Tang, Q.; Eberhard, P. Design and Experimental Validation of a Distributed Cooperative Transportation Scheme. IEEE Trans. Autom. Sci. Eng. 2020. [Google Scholar] [CrossRef]
- Gabellieri, C.; Tognon, M.; Sanalitro, D.; Pallottino, L.; Franchi, A. A study on force-based collaboration in swarms. Swarm Intell. 2020, 14, 57–82. [Google Scholar] [CrossRef]
- Shi, H.; Li, J.; Li, Z. A distributed strategy for cooperative autonomous robots using pedestrian behavior for multi-target search in the unknown environment. Sensors 2020, 20, 1606. [Google Scholar] [CrossRef] [PubMed]
- Sugawara, K. Object Transportation by Swarm Robots Based on Constraint Granular Convection. In Distributed Autonomous Robotic Systems; Springer: Berlin/Heidelberg, Germany, 2019; pp. 329–340. [Google Scholar]
- Arvanitakis, I.; Tzes, A. Collaborative mapping and navigation for a mobile robot swarm. In Proceedings of the 2017 25th Mediterranean Conference on Control and Automation (MED), Valletta, Malta, 3–6 July 2017; pp. 696–700. [Google Scholar]
- Delight, M.; Ramakrishnan, S.; Zambrano, T.; MacCready, T. Developing robotic swarms for ocean surface mapping. In Proceedings of the 2016 IEEE International Conference on Robotics and Automation (ICRA), Stockholm, Sweden, 16–21 May 2016; pp. 5309–5315. [Google Scholar]
- Kegeleirs, M.; Ramos, D.G.; Birattari, M. Random walk exploration for swarm mapping. In Proceedings of the Annual Conference Towards Autonomous Robotic Systems, London, UK, 3–5 July 2019; pp. 211–222. [Google Scholar]
- Kit, J.L.; Mateo, D.; Bouffanais, R. A decentralized mobile computing network for multi-robot systems operations. In Proceedings of the 2018 9th IEEE Annual Ubiquitous Computing, Electronics & Mobile Communication Conference (UEMCON), New York, NY, USA, 8–10 November 2018; pp. 309–314. [Google Scholar]
- Lončar, I.; Babić, A.; Arbanas, B.; Vasiljević, G.; Petrović, T.; Bogdan, S.; Mišković, N. A Heterogeneous Robotic Swarm for Long-Term Monitoring of Marine Environments. Appl. Sci. 2019, 9, 1388. [Google Scholar] [CrossRef]
- Gupta, R.; Bayal, R. Source Detection of Oil Spill using Modified Glowworm Swarm optimization. In Proceedings of the 2020 5th International Conference on Computing, Communication and Security (ICCCS), Patna, India, 14–16 October 2020; pp. 1–6. [Google Scholar]
- Sànchez, N.D.G.; Vargas, P.A.; Couceiro, M.S. A darwinian swarm robotics strategy applied to underwater exploration. In Proceedings of the 2018 IEEE Congress on Evolutionary Computation (CEC), Rio de Janeiro, Brazil, 8–13 July 2018; pp. 1–6. [Google Scholar]
- Garcia-Aunon, P.; Roldán, J.J.; Barrientos, A. Monitoring traffic in future cities with aerial swarms: Developing and optimizing a behavior-based surveillance algorithm. Cogn. Syst. Res. 2019, 54, 273–286. [Google Scholar] [CrossRef]
- Camci, E.; Kripalani, D.R.; Ma, L.; Kayacan, E.; Khanesar, M.A. An aerial robot for rice farm quality inspection with type-2 fuzzy neural networks tuned by particle swarm optimization-sliding mode control hybrid algorithm. Swarm Evol. Comput. 2018, 41, 1–8. [Google Scholar] [CrossRef]
- Zambon, I.; Cecchini, M.; Egidi, G.; Saporito, M.G.; Colantoni, A. Revolution 4.0: Industry vs. agriculture in a future development for SMEs. Processes 2019, 7, 36. [Google Scholar] [CrossRef]
- Turner, C.J.; Oyekan, J.; Stergioulas, L.; Griffin, D. Utilizing Industry 4.0 on the Construction Site Challenges and Opportunities. IEEE Trans. Ind. Inf. 2020, 17, 746–756. [Google Scholar] [CrossRef]
- Benotsmane, R.; Kovács, G.; Dudás, L. Economic, Social Impacts and Operation of Smart Factories in Industry 4.0 Focusing on Simulation and Artificial Intelligence of Collaborating Robots. Soc. Sci. 2019, 8, 143. [Google Scholar] [CrossRef]
- Limeira, M.A.; Piardi, L.; Kalempa, V.C.; de Oliveira, A.S.; Leitão, P. WsBot: A Tiny, Low-Cost Swarm Robot for Experimentation on Industry 4.0. In Proceedings of the 2019 Latin American Robotics Symposium (LARS), 2019 Brazilian Symposium on Robotics (SBR) and 2019 Workshop on Robotics in Education (WRE), Grande do Sul, Brazil, 22–26 October 2019; pp. 293–298. [Google Scholar]
- Lee, C. Development of an industrial Internet of Things (IIoT) based smart robotic warehouse management system. In Proceedings of the International Conference on Information Resources Management (CONF-IRM), Ningbo, China, 3–5 June 2018. [Google Scholar]
- Liu, X.; Cao, J.; Yang, Y.; Jiang, S. CPS-based smart warehouse for industry 4.0: A survey of the underlying technologies. Computers 2018, 7, 13. [Google Scholar]
- Liu, Y.; Wang, L.; Huang, H.; Liu, M.; Xu, C.Z. A novel swarm robot simulation platform for warehousing logistics. In Proceedings of the 2017 IEEE International Conference on Robotics and Biomimetics (ROBIO), Macau, China, 5–8 December 2017; pp. 2669–2674. [Google Scholar]
- Zhang, J.; Ding, G.; Zou, Y.; Qin, S.; Fu, J. Review of job shop scheduling research and its new perspectives under Industry 4.0. J. Intell. Manuf. 2019, 30, 1809–1830. [Google Scholar] [CrossRef]
- Farrugia, J.L.; Fabri, S.G. Swarm robotics for object transportation. In Proceedings of the 2018 UKACC 12th International Conference on Control (CONTROL), Sheffield, UK, 5–7 September 2018; pp. 353–358. [Google Scholar]
- Anil, H.; Nikhil, K.; Chaitra, V.; Sharan, B.G. Revolutionizing farming using swarm robotics. In Proceedings of the 2015 6th International Conference on Intelligent Systems, Modelling and Simulation, Kuala Lumpur, Malaysia, 9–12 February 2015; pp. 141–147. [Google Scholar]
- Albani, D.; IJsselmuiden, J.; Haken, R.; Trianni, V. Monitoring and mapping with robot swarms for agricultural applications. In Proceedings of the 2017 14th IEEE International Conference on Advanced Video and Signal Based Surveillance (AVSS), Lecce, Italy, 29 August–1 September 2017; pp. 1–6. [Google Scholar]
- Carbone, C.; Garibaldi, O.; Kurt, Z. Swarm robotics as a solution to crops inspection for precision agriculture. KnE Eng. 2018, 552–562. [Google Scholar] [CrossRef]
- Blender, T.; Buchner, T.; Fernandez, B.; Pichlmaier, B.; Schlegel, C. Managing a mobile agricultural robot swarm for a seeding task. In Proceedings of the IECON 2016-42nd Annual Conference of the IEEE Industrial Electronics Society, Florence, Italy, 23–26 October 2016; pp. 6879–6886. [Google Scholar]
- Millard, A.G.; Ravikanna, R.; Groß, R.; Chesmore, D. Towards a Swarm Robotic System for Autonomous Cereal Harvesting. In Proceedings of the Annual Conference Towards Autonomous Robotic Systems, London, UK, 3–5 July 2019; pp. 458–461. [Google Scholar]
- Minßen, T.; Gaus, C.; Urso, L.; Hanke, S.; Schattenberg, J.; Frerichs, L. Robots for plant-specific care operations in Arable Farming-concept and technological requirements for the operation of robot swarms for plant care tasks. EFITA/WCCA 2011, 11, 1–11. [Google Scholar]
- Gaus, C.C.; Urso, L.M.; Minßen, T.F.; de Witte, T. Economics of Mechanical Weeding by a Swarm of Small Field Robots. In Proceedings of the 57th Annual Conference of the German Association of Agricultural Economists (GEWISOLA), Weihenstephan, Germany, 13–15 September 2017. [Google Scholar] [CrossRef]
- Melenbrink, N.; Rinderspacher, K.; Menges, A.; Werfel, J. Autonomous anchoring for robotic construction. Autom. Constr. 2020, 120, 103391. [Google Scholar] [CrossRef]
- Melenbrink, N.; Werfel, J. Local force cues for strength and stability in a distributed robotic construction system. Swarm Intell. 2018, 12, 129–153. [Google Scholar] [CrossRef]
- Werfel, J.; Petersen, K.; Nagpal, R. Designing collective behavior in a termite-inspired robot construction team. Science 2014, 343, 754–758. [Google Scholar] [CrossRef] [PubMed]
- Gerling, V.; Von Mammen, S. Robotics for self-organised construction. In Proceedings of the 2016 IEEE 1st International Workshops on Foundations and Applications of Self* Systems (FAS* W), Augsburg, Germany, 12–16 September 2016; pp. 162–167. [Google Scholar]
- Rouff, C.A.; Hinchey, M.G.; Truszkowski, W.F.; Rash, J.L. Experiences applying formal approaches in the development of swarm-based space exploration systems. Int. J. Softw. Tools Technol. Transf. 2006, 8, 587–603. [Google Scholar] [CrossRef]
- Masár, M.; Zelenka, J. Modification of PSO algorithm for the purpose of space exploration. In Proceedings of the 2012 IEEE 16th International Conference on Intelligent Engineering Systems (INES), Lisbon, Portugal, 13–15 June 2012; pp. 51–54. [Google Scholar]
- Vassev, E.; Sterritt, R.; Rouff, C.; Hinchey, M. Swarm technology at NASA: Building resilient systems. IT Prof. 2012, 14, 36–42. [Google Scholar] [CrossRef]
- Hao, W.; Qin, S. Multi-objective path planning for space exploration robot based on chaos immune particle swarm optimization algorithm. In Proceedings of the International Conference on Artificial Intelligence and Computational Intelligence, Taiyuan, China, 24–25 September 2011; pp. 42–52. [Google Scholar]
- Sabatini, M.; Palmerini, G.B. Collective control of spacecraft swarms for space exploration. Celest. Mech. Dyn. Astron. 2009, 105, 229. [Google Scholar] [CrossRef]
- Katz, J.; Mohan, S.; Miller, D. On-orbit assembly of flexible space structures with SWARM. In Proceedings of the AIAA Infotech@Aerospace 2010, Atlanta, GA, USA, 20–22 April 2010; p. 3524. [Google Scholar]
- Ayre, M.; Izzo, D.; Pettazzi, L. Self assembly in space using behaviour based intelligent components. In Proceedings of the TAROS, Towards Autonomous Robotic Systems, London, UK, 12–14 September 2005; pp. 1–8. [Google Scholar]


{kind=link}
| CPU/MCU | Memory | Extra MCU | Battery | Sensors | Actuators | Size | |
|---|---|---|---|---|---|---|---|
| Khepera | Arm Cortex-A8 @ 800 MHz | 256 MB | dsPIC33FJ64 GS608 | 1 × 7.2 V Li-Poly (3600 mAh) | Optical Sensors, Ultrassonic Sensors, IMU, Microphones, Camera | 2 DC motors, 3 RGB LEDS, 1 loudspeaker | 14.8 cm |
| Khepera IV | Arm Cortex-A8 @ 800 MHz | 256 MB | dsPIC33FJ64 GS608 | 1 × 7.4 V Li-Poly (3400 mAh) | 8 IR Proximity and Light 4 IR Ground Proximity 5 Ultrassonic Sensors IMU, Microphone, Camera | 2 DC motors, 3 RGB LEDS, 1 loudspeaker | 14.0 cm |
| Alice | PIC16F84 @ 4 MHz | - | - | 3 × 1.5 V (23 mAh) | 4 infrared sensors, radio board | 2 Swatch motors, radio board | 2.1 cm |
| Kobot | PIC18F4620A @ 20 MHz | - | - | 2000 mAh Li-Poly (possibly 3.7 V) | 8 infrared sensors, ZigBeeCommunication Module | 2 DC Motors, ZigBee communication module | 12 cm |
| E-puck | PIC30F46014 @ 64 MHz | 8 kB | - | 5 Wh Li-Ion, 1800 mAh (possibly 3.7 V) | 8 infrared sensors, 3D accelerometer, 3D gyro, 3 microphones, camera | 2 stepper motors, 1 loudspeaker, 8 red LEDs, green LED ring, red LED beam | 7.5 cm |
| E-puck 2 | STM32F407 @ 168 MHz | 192 kB | - | 5 Wh Li-Ion, 1800 mAh (possibly 3.7 V) | 8 infrared sensors, 3D accelerometer, 3D gyro, 3D magnetometer, 4 microphones, camera, Front real distance sensor, Time of fight (ToF) | 2 stepper motors, 1 loudspeaker, 4 red LED, 4 RGB LEDs, green light, 1 front red LED Bluetooth 2.0, BLE, Wi-Fi | 7.5 cm |
| Jasmine | ATmega168 @ 8MHz | 1 kB | ATmega88 | 5V Li-Po Battery (250 mAh) | 6 IR Phototransistors, 1 IR receiver for communication | 2 DC Motors, 6 IR Phototransistors, one IR LED for communication | 3.0 cm |
| Sambot | STM32 ARM Cortex-M3 @ 72 MHz | 128 kB | 4× ATMega8 | - | 4 encoders, Accelerometer, Gyroscope, ZigBee Communication Module | 2 Micro DC Motors, Coupling module motor, coupling hook motor, ZigBee communication module | 10.2 cm |
| S-bot | XScale ARM @ 400 MHz | 64 MB | 10× PIC processors | 4Wh Li-Ion (possibly 3.7 V, 1100 mAh) | color omnidirectional camera, 16 lateral and 4 bottom IR proximity sensors, 24 light sensors, a 3 axis accelerometer, two humidity sensors, incremental encoders and torque sensors | Mobility DC motors, gripper motors, 2 loudspeakers, 8 RGB LEDs | 11.6 cm |
| AMiR | ATmega168 @ 8MHz | 1 kB | - | 3.7 V Li-Poly (400 mAh) | IR Receivers | 2 DC Motors, IR Emitters | 7.3 cm |
| Colias | ARM Cortex-M4 @ 180 MHz | 256 kB | Atmega168 | Lithum 3.7 V (320 mAh) | 2 DC Motors, RGB LED, 3 LEDs | Motion Sensor, Camera, 2 microphones, 2 light sensors, 3 IR receivers | 4.0 cm |
| eSwarBot | ATMega328P @ 16 MHz | 32 KB | - | 1 × 9 V (2300 mAh) | MaxSonar EZ1, 2 encoders, 2.4 GHz XBee | 6 RGB LED, 2.4 GHz XBee, 2 DC Motors | 12.6 cm |
| Pheeno | ARM Cortex-A7 @ 900 MHz | 1 GB | ATmega328P | 11.1 V Li-Po (3000 mAh) | 3D accelerometer, 3D magnetometer, wheel encoders, IR sensor, camera | RPR serial linkage servo, 2 DC Motors | 5.0 cm |
| microUSV | ARM11 @ 1GHz | 512 MB | ATmega328 | 9 V Battery | IMU | DC Motor | 23.0 cm |
| mROBerTO | ARM Cortex-M0 @ 16 MHz | 256 KB | - | 3 × 3.7 V Li-Po (120 mAh) | Light, range, gyro, camera, accelerometer, compass, distance, bearing | 2 micro DC motors | 3.2 cm |
| Kilobot | Atmega328 @ 8 MHz | 32 KB | - | 3.4 V Li-ion (160 mAh) | IR Receiver | infrared LED transmitter, 2 Vibration Motors | 1.6 cm |
| Tribot | ATtiny4313 @ 10 MHz | 256 B | - | 3 × 3.7 V Li-Po (120 mAh) | 2 IR proximity sensors | 2 IR transceivers, 3 linear spring-type shape-memory alloy (SMA) | 5.8 cm |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Dias, P.G.F.; Silva, M.C.; Rocha Filho, G.P.; Vargas, P.A.; Cota, L.P.; Pessin, G. Swarm Robotics: A Perspective on the Latest Reviewed Concepts and Applications. Sensors 2021, 21, 2062. https://doi.org/10.3390/s21062062
Dias PGF, Silva MC, Rocha Filho GP, Vargas PA, Cota LP, Pessin G. Swarm Robotics: A Perspective on the Latest Reviewed Concepts and Applications. Sensors. 2021; 21(6):2062. https://doi.org/10.3390/s21062062
Chicago/Turabian StyleDias, Pollyanna G. Faria, Mateus C. Silva, Geraldo P. Rocha Filho, Patrícia A. Vargas, Luciano P. Cota, and Gustavo Pessin. 2021. "Swarm Robotics: A Perspective on the Latest Reviewed Concepts and Applications" Sensors 21, no. 6: 2062. https://doi.org/10.3390/s21062062
APA StyleDias, P. G. F., Silva, M. C., Rocha Filho, G. P., Vargas, P. A., Cota, L. P., & Pessin, G. (2021). Swarm Robotics: A Perspective on the Latest Reviewed Concepts and Applications. Sensors, 21(6), 2062. https://doi.org/10.3390/s21062062