
Westdrive X LoopAR: An Open-Access Virtual Reality Project in Unity for Evaluating User Interaction Methods during Takeover Requests


 ,
, 

Abstract
1. Introduction
2. Methods and Main Features of LoopAR
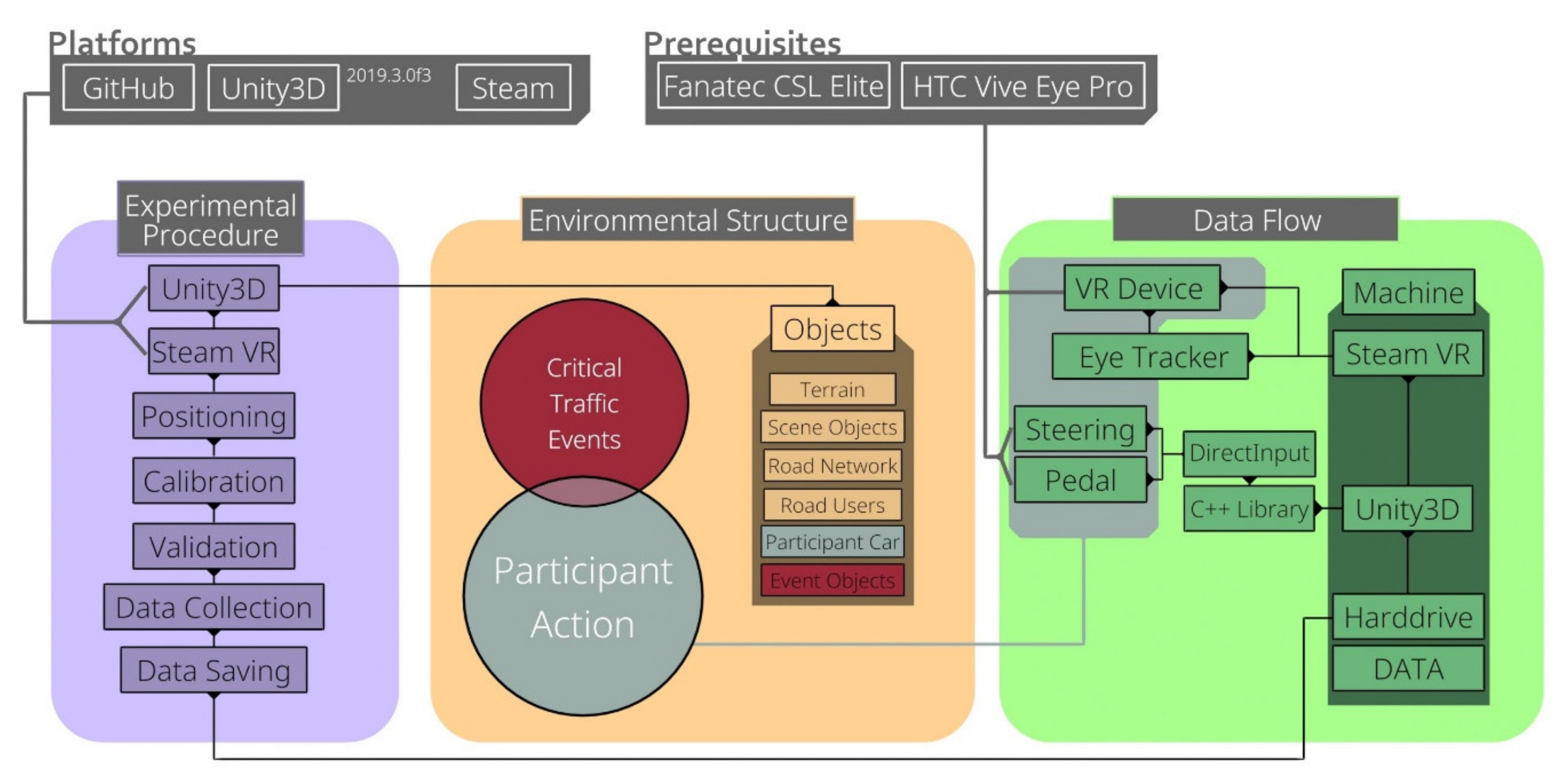
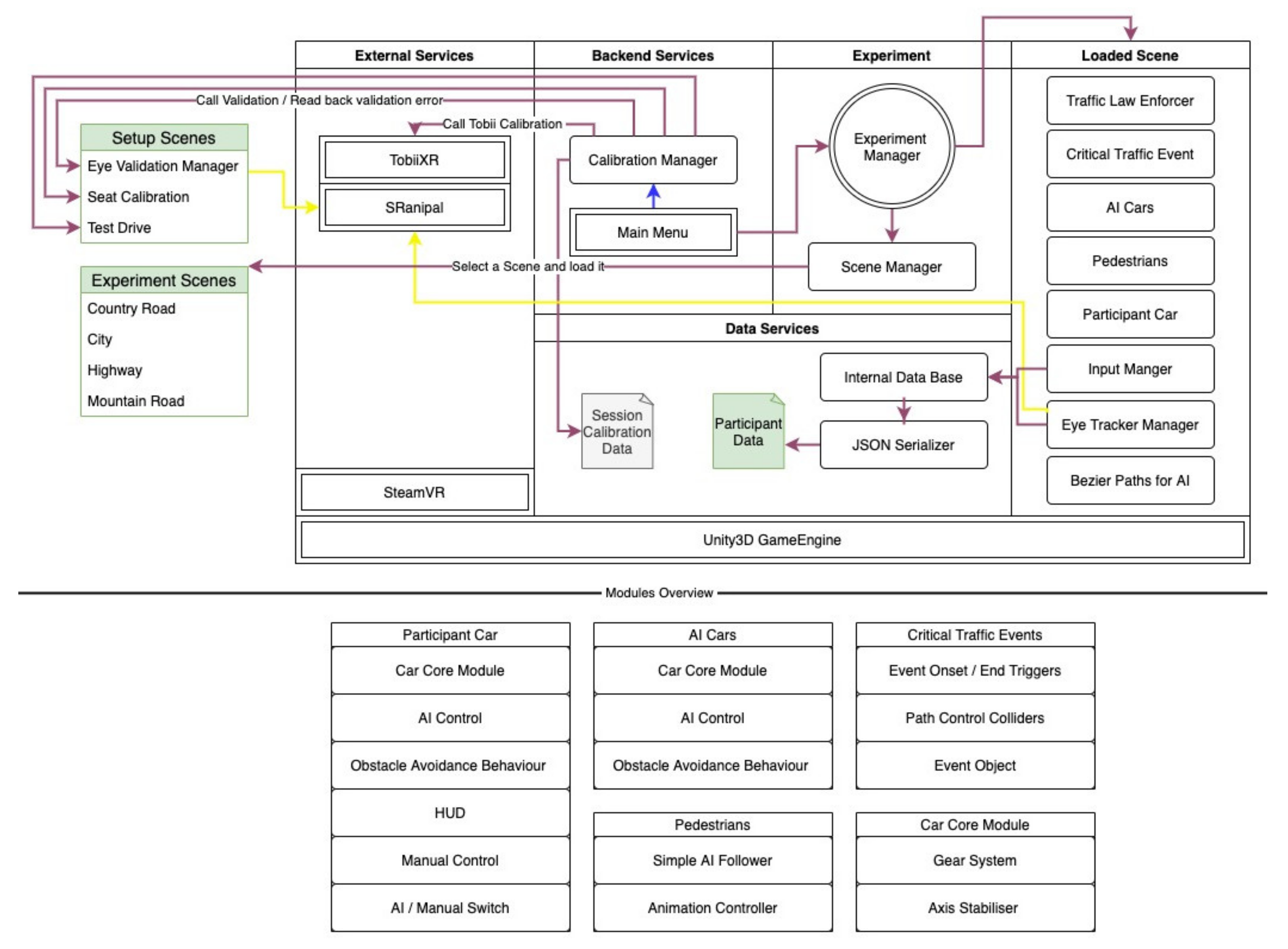
2.1. Platform
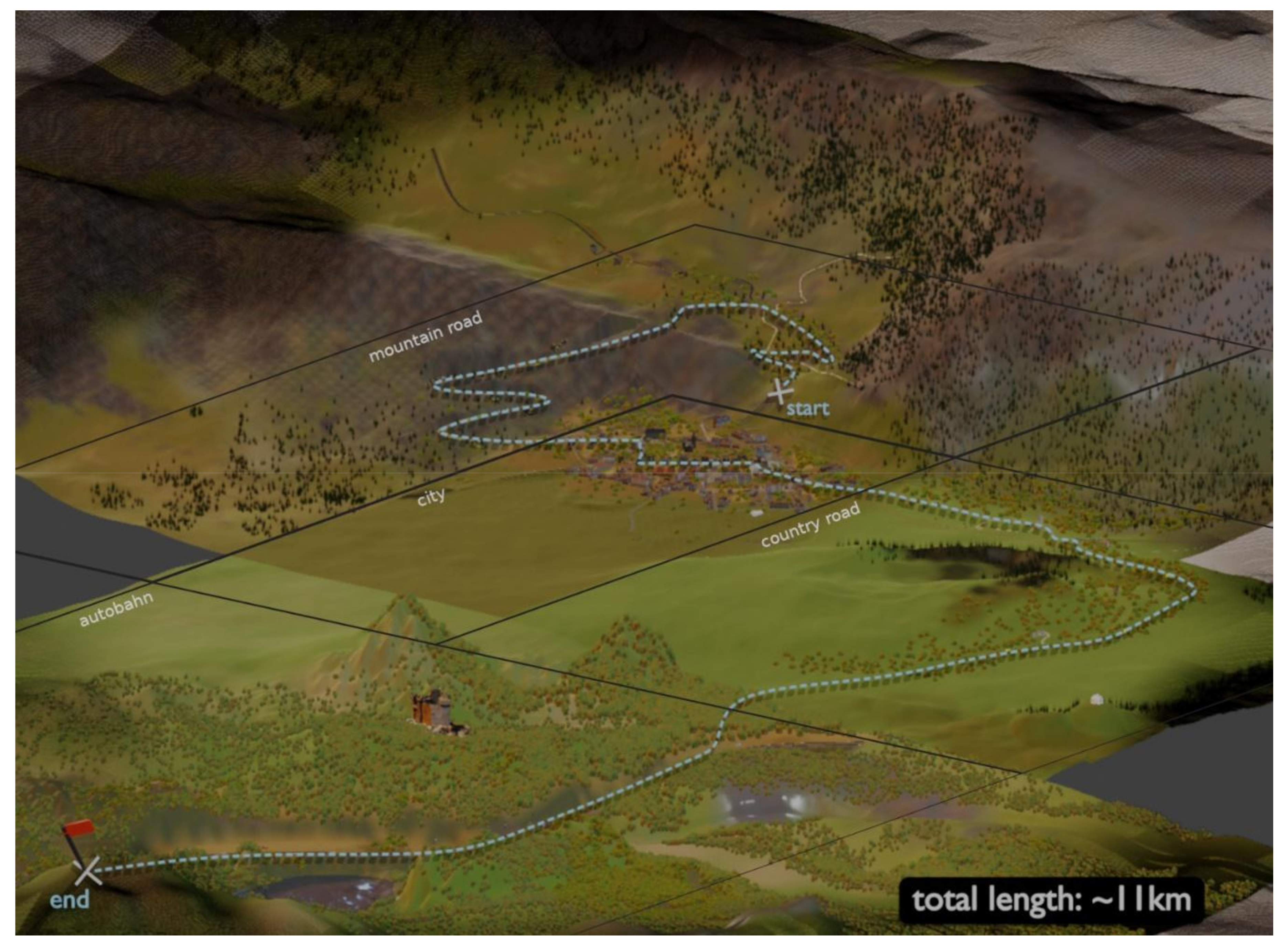
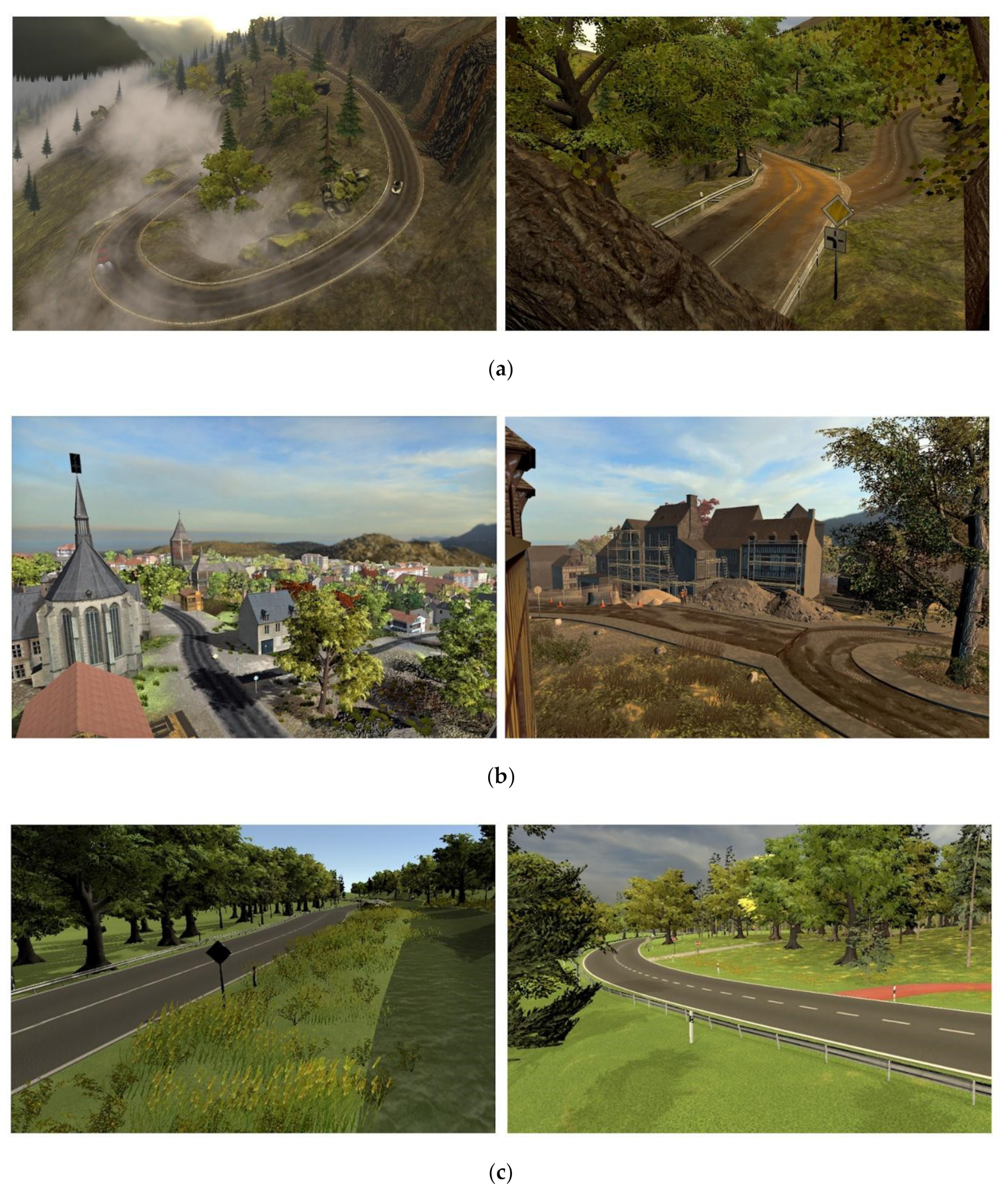
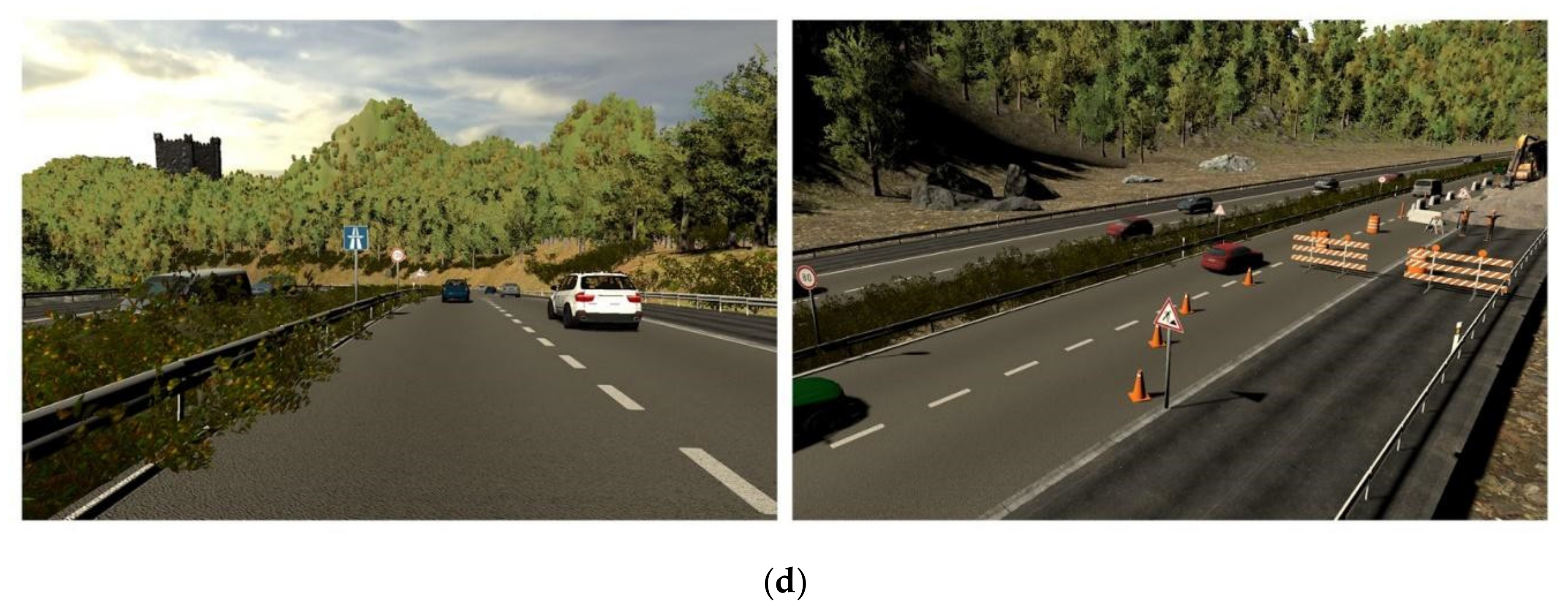
2.2. Virtual Environment
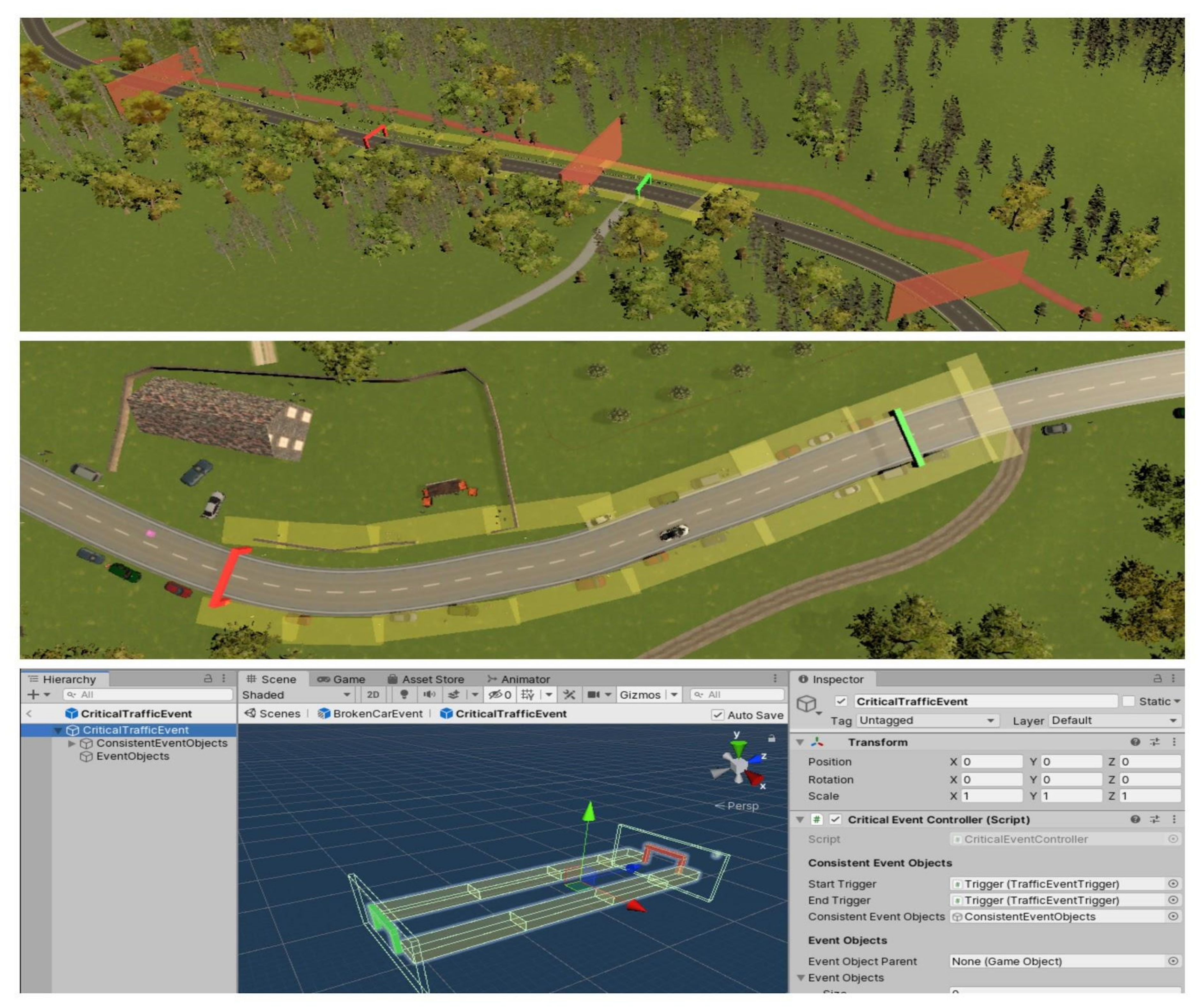
2.3. Critical Traffic Events
2.4. Cars and Traffic Behavior
2.5. Experiment Management
3. Hardware Requirements
4. Discussion
5. User Reports
6. Conclusions
Supplementary Materials
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Norman, D.A. The ‘problem’ with automation: Inappropriate feedback and interaction, not ‘over-automation’. Philos. Trans. Royal Soc. Lond. B Biol. Sci. 1990, 327, 585–593. [Google Scholar]
- Bengler, K.; Rettenmaier, M.; Fritz, N.; Feierle, A. From HMI to HMIs: Towards an HMI Framework for Automated Driving. Information 2020, 11, 61. [Google Scholar] [CrossRef]
- Li, S.; Blythe, P.; Edwards, S.; Goodman, P.; Hill, G. Investigation of the influence of multitasking on drivers’ takeover performance in highly automated vehicles. In Proceedings of the 26th Intelligent Transport Systems World Congress, Newcastle University, Singapore, 21–25 October 2019. [Google Scholar]
- Lindgren, T.; Fors, V.; Pink, S.; Osz, K. Anticipatory experience in everyday autonomous driving. Pers. Ubiquit. Comput. 2020. [Google Scholar] [CrossRef]
- Audi. Audi Technology Portal. Available online: https://www.audi-technology-portal.de/en/electrics-electronics/driver-assistant-systems/audi-q7-traffic-jam-assist (accessed on 12 January 2020).
- Tesla. 2020. Available online: https://www.tesla.com/de_DE/autopilot (accessed on 26 November 2020).
- Masalonis, A.J.; Duley, J.A.; Parasuraman, R. Effects of manual and autopilot control on mental workload and vigilance during simulated general aviation flight. Transp. Hum. Factors 1999, 1, 187–200. [Google Scholar] [CrossRef]
- Zeeb, K.; Buchner, A.; Schrauf, M. What determines the takeover time? An integrated model approach of driver takeover after automated driving. Accid. Anal. Prev. 2015, 78, 212–221. [Google Scholar] [CrossRef] [PubMed]
- Abe, G.; Itoh, M.; Yamamura, T. Effective and acceptable forward collision warning systems based on relationships between car-following behaviour and reaction to deceleration of lead vehicle. In Human Modelling in Assisted Transportation; Springer: Milano, Italy, 2011; pp. 155–164. [Google Scholar]
- Maurer, M.; Gerdes, J.C.; Lenz, B.; Winner, H. (Eds.) Autonomes Fahren: Technische, Rechtliche und Gesellschaftliche Aspekte; Springer: Berlin/Heidelberg, Germany, 2015. [Google Scholar]
- Marberger, C.; Mielenz, H.; Naujoks, F.; Radlmayr, J.; Bengler, K.; Wandtner, B. Understanding and applying the concept of “driver availability” in automated driving. In International Conference on Applied Human Factors and Ergonomics; Springer: Cham, The Netherland, 2017; pp. 595–605. [Google Scholar]
- Melcher, V.; Rauh, S.; Diederichs, F.; Widlroither, H.; Bauer, W. Take-over requests for automated driving. Procedia Manufac. Turing 2015, 3, 2867–2873. [Google Scholar] [CrossRef]
- Dogan, E.; Honnêt, V.; Masfrand, S.; Guillaume, A. Effects of non-driving-related tasks on takeover performance in different takeover situations in conditionally automated driving. Transp. Res. Part F Traffic Psychol. Behav. 2019, 62, 494–504. [Google Scholar] [CrossRef]
- Gold, C.; Damböck, D.; Lorenz, L.; Bengler, K. “Take over!” How long does it take to get the driver back into the loop? In Proceedings of the Human Factors and Ergonomics Society Annual Meeting; Sage: Los Angeles, CA, USA, 2013; Volume 57, pp. 1938–1942. [Google Scholar]
- Summala, H. Brake reaction times and driver behavior analysis. Transp. Hum. Factors 2000, 2, 217–226. [Google Scholar] [CrossRef]
- Green, M. “How long does it take to stop?” Methodological analysis of driver perception-brake times. Transp. Hum. Factors 2000, 2, 195–216. [Google Scholar] [CrossRef]
- Jarosch, O.; Bellem, H.; Bengler, K. Effects of task-induced fatigue in prolonged conditional automated driving. Hum. Factors 2019, 61, 1186–1199. [Google Scholar] [CrossRef] [PubMed]
- Endsley, M.R.; Kiris, E.O. The out-of-the-loop performance problem and level of control in automation. Hum. Factors 1995, 37, 381–394. [Google Scholar] [CrossRef]
- Morra, L.; Lamberti, F.; Pratticó, F.G.; La Rosa, S.; Montuschi, P. Building Trust in Autonomous Vehicles: Role of Virtual Reality Driving Simulators in HMI Design. IEEE Trans. Veh. Technol. 2019, 68, 9438–9450. [Google Scholar] [CrossRef]
- Howard, D.; Dai, D. Public perceptions of self-driving cars: The case of Berkeley, California. In Proceedings of the Transportation Research Board 93rd Annual Meeting, Washington, DC, USA, 12–16 January 2014; Volume 14, p. 4502. [Google Scholar]
- Nezami, F.N.; Wächter, M.A.; Pipa, G.; König, P. Project Westdrive: Unity City with Self-Driving Cars and Pedestrians for Virtual Reality Studies. Front. ICT 2020, 7, 1. [Google Scholar] [CrossRef]
- Cruden Automotive Simulators. Cruden Simulators. Available online: https://www.cruden.com/automotive-driving-simulators/ (accessed on 7 December 2020).
- Esri CityEngine. 3D Modeling Software for Urban Environments. ESRI. 2013. Available online: https://www.esri.com/en-us/arcgis/products/arcgis-cityengine/overview (accessed on 15 December 2019).
- FUZOR. 2019. Available online: https://www.kalloctech.com/ (accessed on 16 December 2019).
- Dosovitskiy, A.; Ros, G.; Codevilla, F.; Lopez, A.; Koltun, V. CARLA: An open urban driving simulator. arXiv 2017, arXiv:1711.03938. [Google Scholar]
- Juliani, A.; Berges, V.P.; Vckay, E.; Gao, Y.; Henry, H.; Mattar, M.; Lange, D. Unity: A general platform for intelligent agents. arXiv 2018, arXiv:1809.02627. [Google Scholar]
- Open Street Map (OSM). Available online: https://www.openstreetmap.org/ (accessed on 7 December 2020).
- Blender Foundation. Blender Homepage. 2002. Available online: https://www.blender.org/ (accessed on 19 November 2020).
- Prautzsch, H.; Boehm, W.; Paluszny, M. Bézier and B-Spline Techniques; Springer Science & Business Media: Berlin/Heidelberg, Germany, 2013. [Google Scholar]
- Sebastian Lague, Path-Creator 2019. GitHub Repository. Available online: https://github.com/SebLague/Path-Creator (accessed on 12. June 2020).
- LaViola, J.J., Jr. A discussion of cybersickness in virtual environments. ACM Sigchi Bull. 2000, 32, 47–56. [Google Scholar] [CrossRef]
- Lewis, J.R. The system usability scale: Past, present, and future. Int. J. Hum. Comput. Interact. 2018, 34, 577–590. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| GPU | Nvidia GeForce RTX 2080, equivalent or better |
| CPU | Intel(R) Xeon E5-1607 v4, equivalent or better |
| RAM | 32 GB |
| Video Output | HDMI 1.4, DisplayPort 1.2 or newer. USB port, 1x USB 2.0 or better |
| Operating System | Windows 10 |
| VR HMD | Vive Pro Eye with built-in Tobii Eye Tracker |
| Steering Wheel | Game-ready Fanatec CSL Elite Steering Wheel and pedals |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Nezami, F.N.; Wächter, M.A.; Maleki, N.; Spaniol, P.; Kühne, L.M.; Haas, A.; Pingel, J.M.; Tiemann, L.; Nienhaus, F.; Keller, L.; et al. Westdrive X LoopAR: An Open-Access Virtual Reality Project in Unity for Evaluating User Interaction Methods during Takeover Requests. Sensors 2021, 21, 1879. https://doi.org/10.3390/s21051879
Nezami FN, Wächter MA, Maleki N, Spaniol P, Kühne LM, Haas A, Pingel JM, Tiemann L, Nienhaus F, Keller L, et al. Westdrive X LoopAR: An Open-Access Virtual Reality Project in Unity for Evaluating User Interaction Methods during Takeover Requests. Sensors. 2021; 21(5):1879. https://doi.org/10.3390/s21051879
Chicago/Turabian StyleNezami, Farbod N., Maximilian A. Wächter, Nora Maleki, Philipp Spaniol, Lea M. Kühne, Anke Haas, Johannes M. Pingel, Linus Tiemann, Frederik Nienhaus, Lynn Keller, and et al. 2021. "Westdrive X LoopAR: An Open-Access Virtual Reality Project in Unity for Evaluating User Interaction Methods during Takeover Requests" Sensors 21, no. 5: 1879. https://doi.org/10.3390/s21051879
APA StyleNezami, F. N., Wächter, M. A., Maleki, N., Spaniol, P., Kühne, L. M., Haas, A., Pingel, J. M., Tiemann, L., Nienhaus, F., Keller, L., König, S. U., König, P., & Pipa, G. (2021). Westdrive X LoopAR: An Open-Access Virtual Reality Project in Unity for Evaluating User Interaction Methods during Takeover Requests. Sensors, 21(5), 1879. https://doi.org/10.3390/s21051879