
FSD-BRIEF: A Distorted BRIEF Descriptor for Fisheye Image Based on Spherical Perspective Model




Abstract
1. Introduction
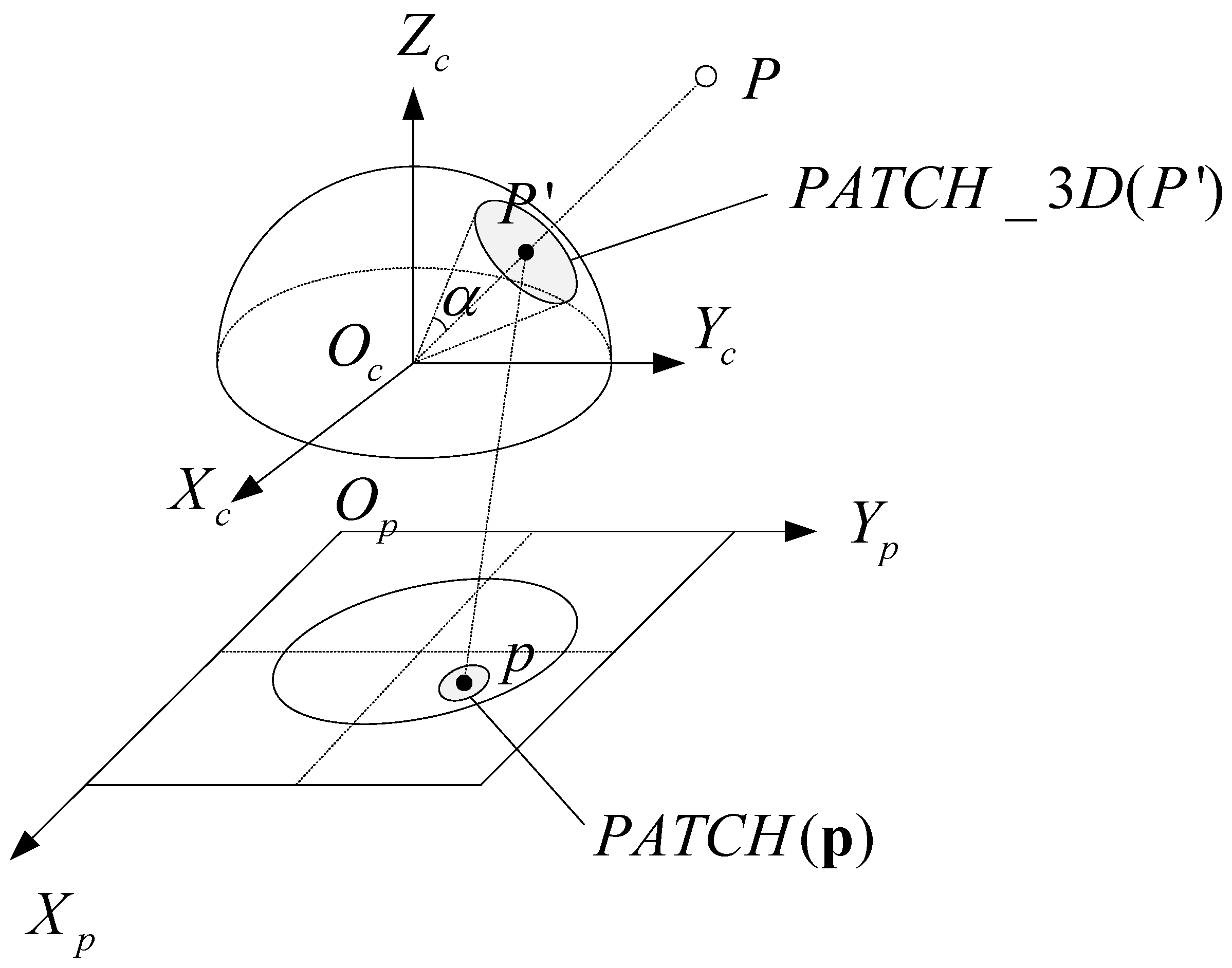
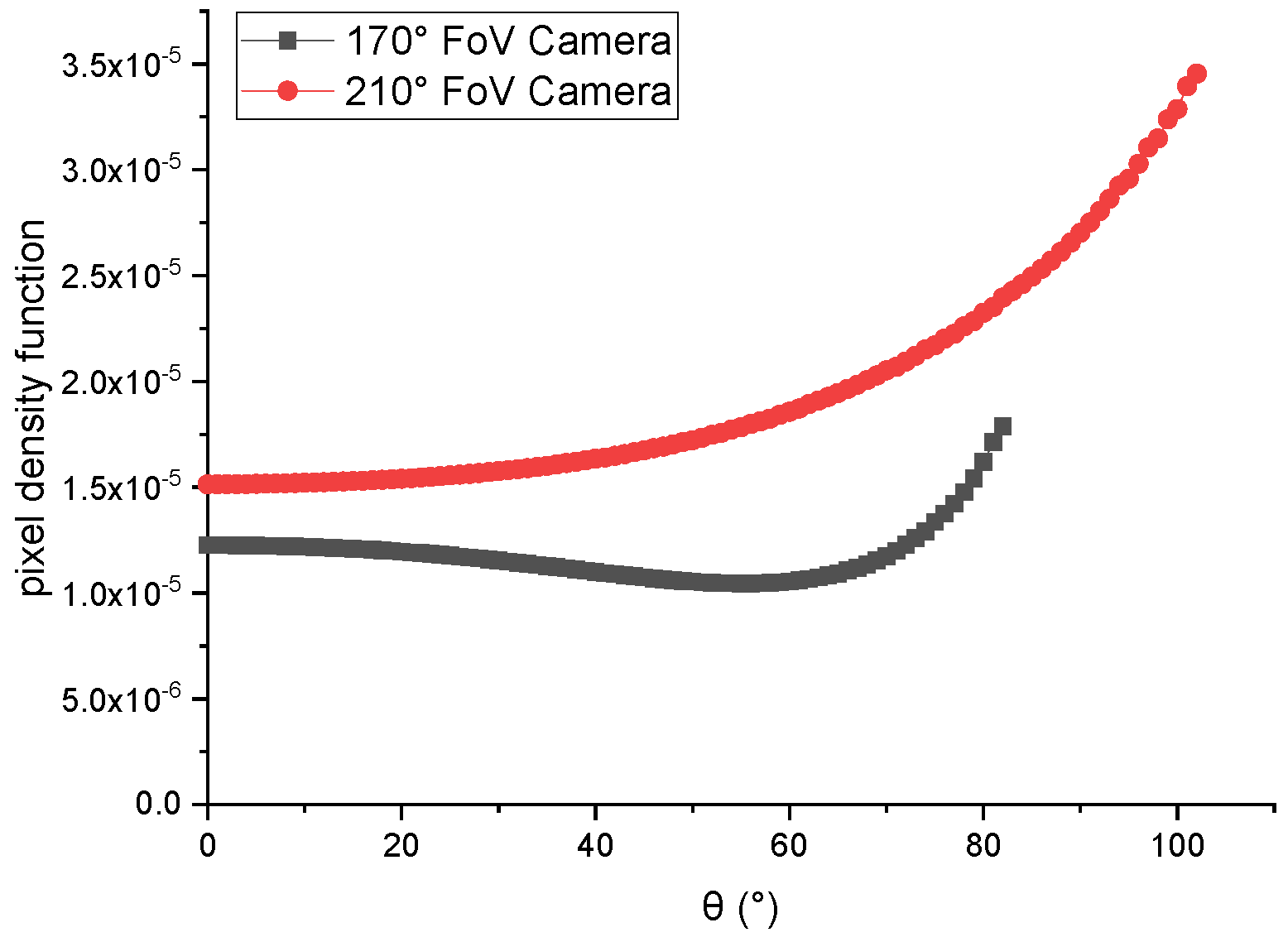
- A new pixel density function represented by the area of the spherical surface patch that each pixel of fisheye image occupies;
- A new method of determining the 3D gray centroid and the direction of feature points with pixel density function based on a spherical perspective model;
- A new feature point attitude matrix, providing a nonsingular description for both the position and the direction of the feature point in the spherical image surface;
- A novel descriptor template distortion method based on the spherical perspective model and the feature point attitude matrix.
2. Related Work
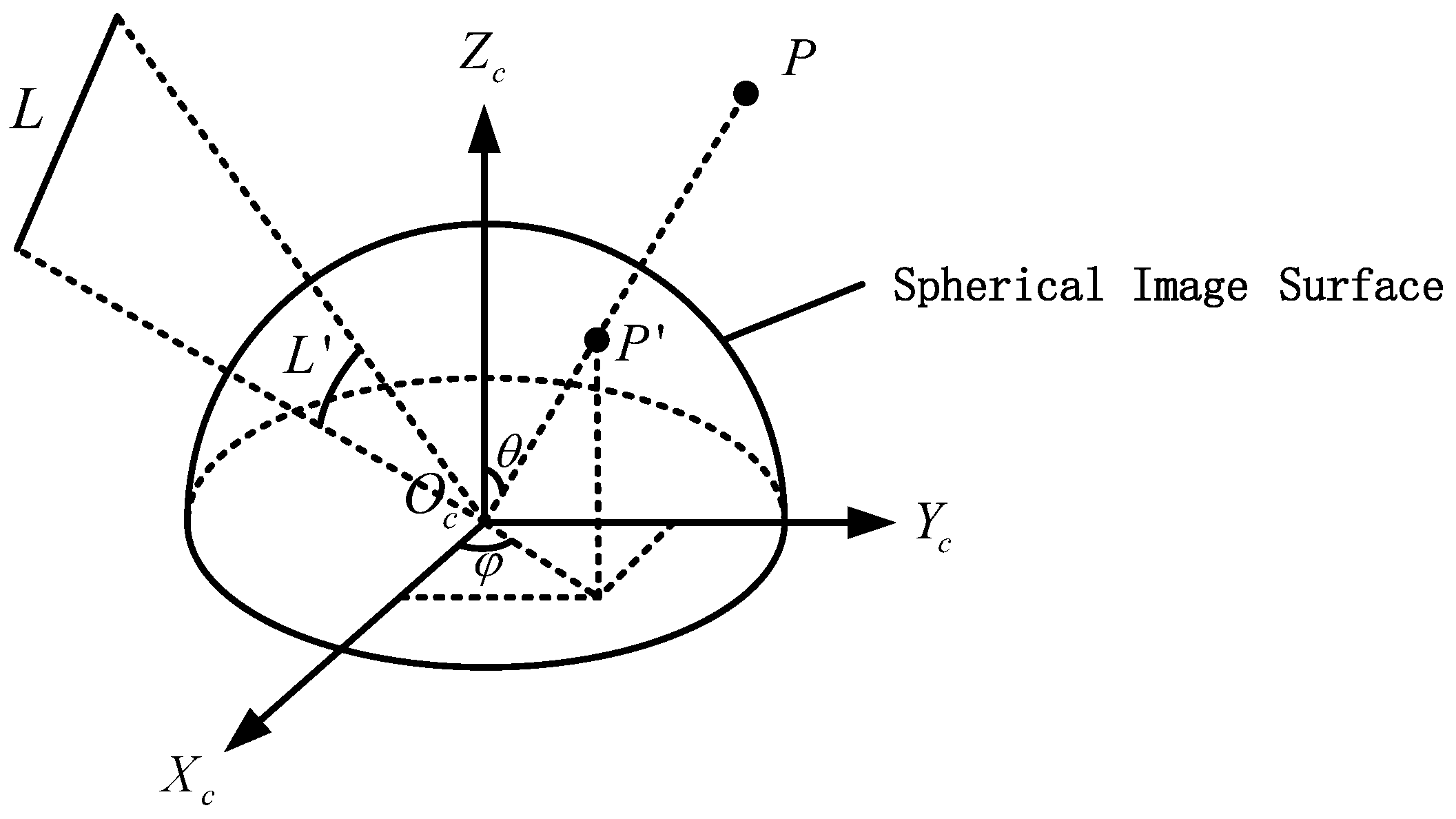
3. Fisheye Camera Model
4. FSD-BRIEF Descriptor
4.1. Pixel Density Function Designing
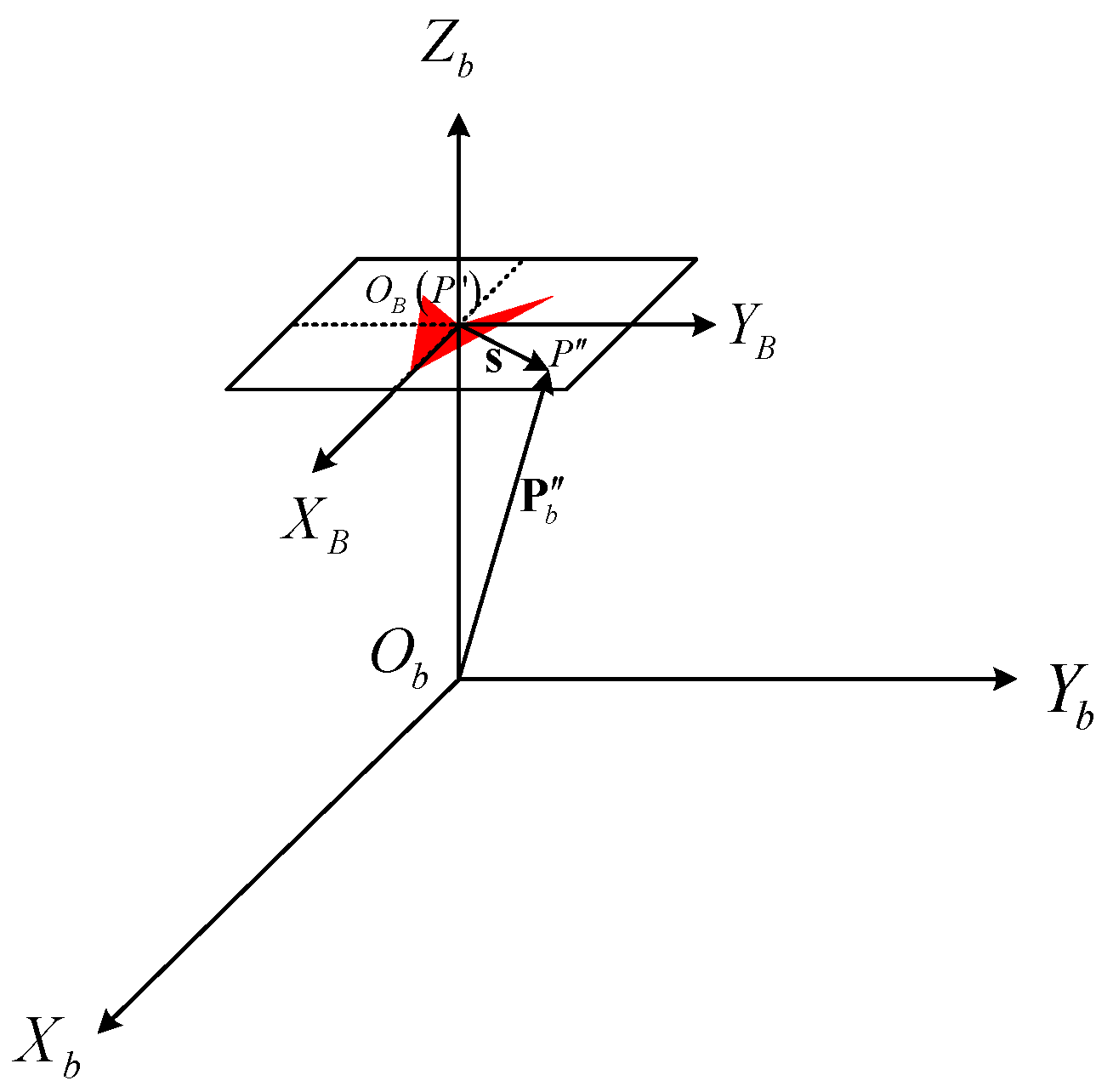
4.2. 3D Gray Centroid Calculation
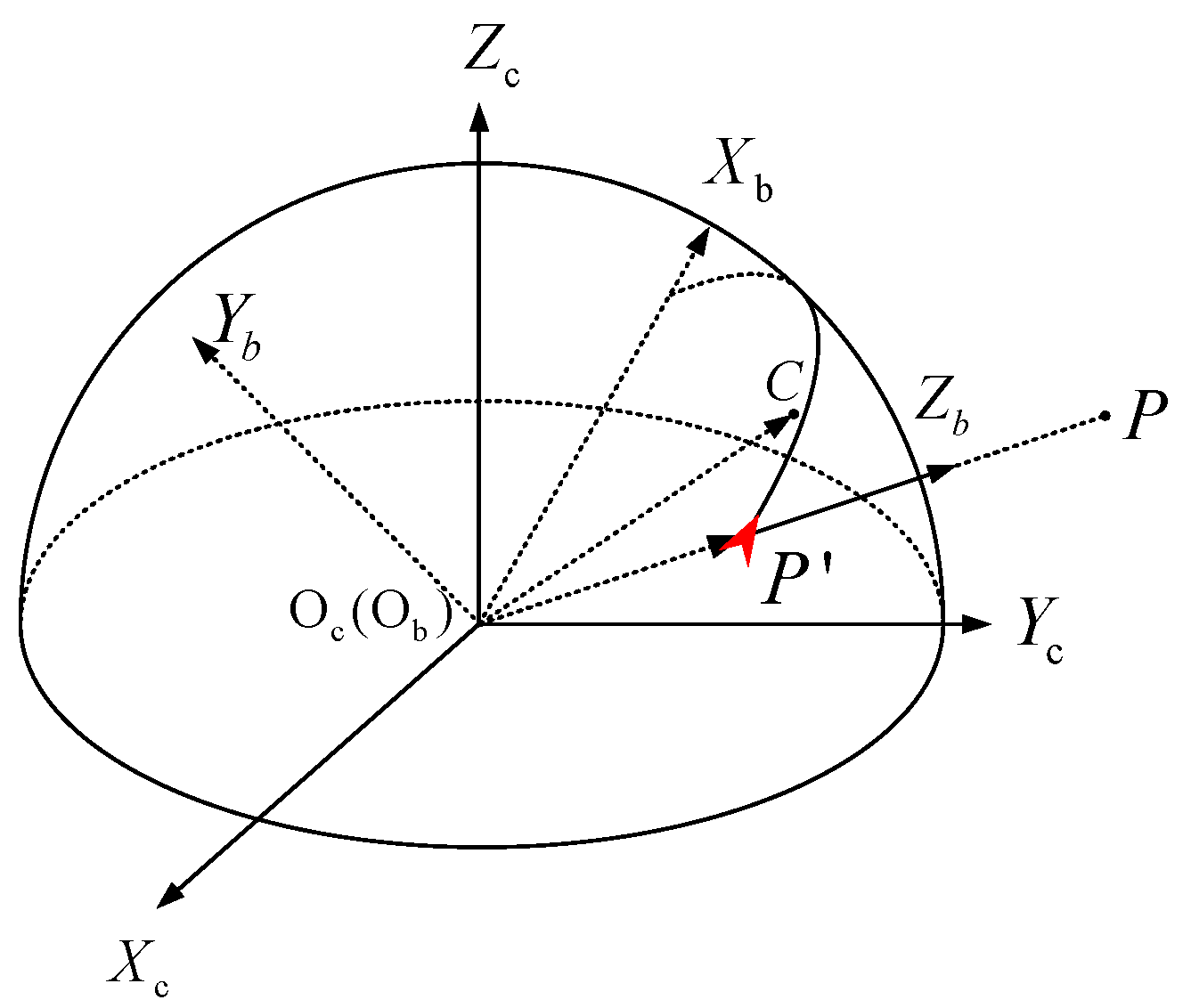
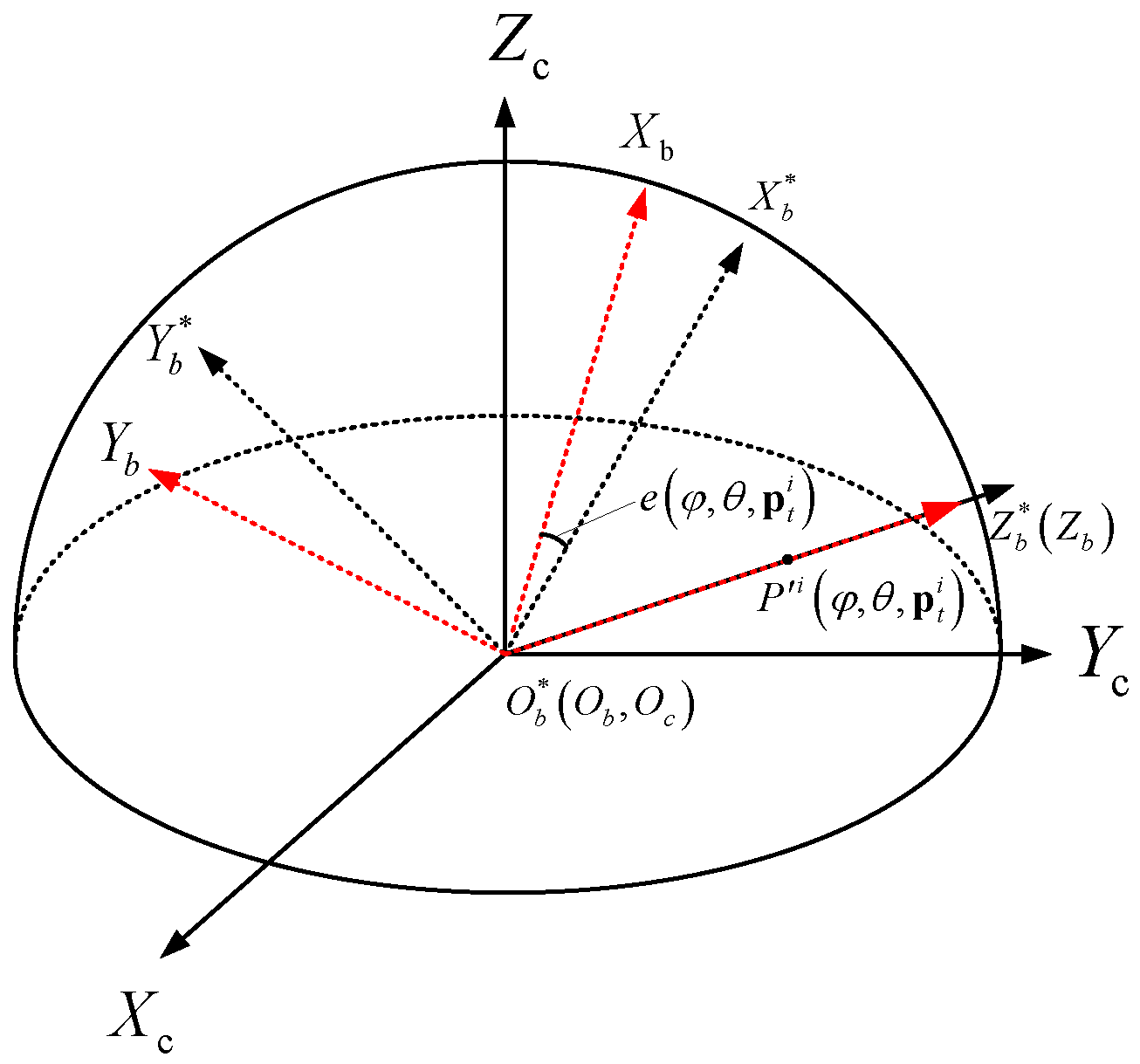
4.3. Feature Point Attitude Matrix Construction
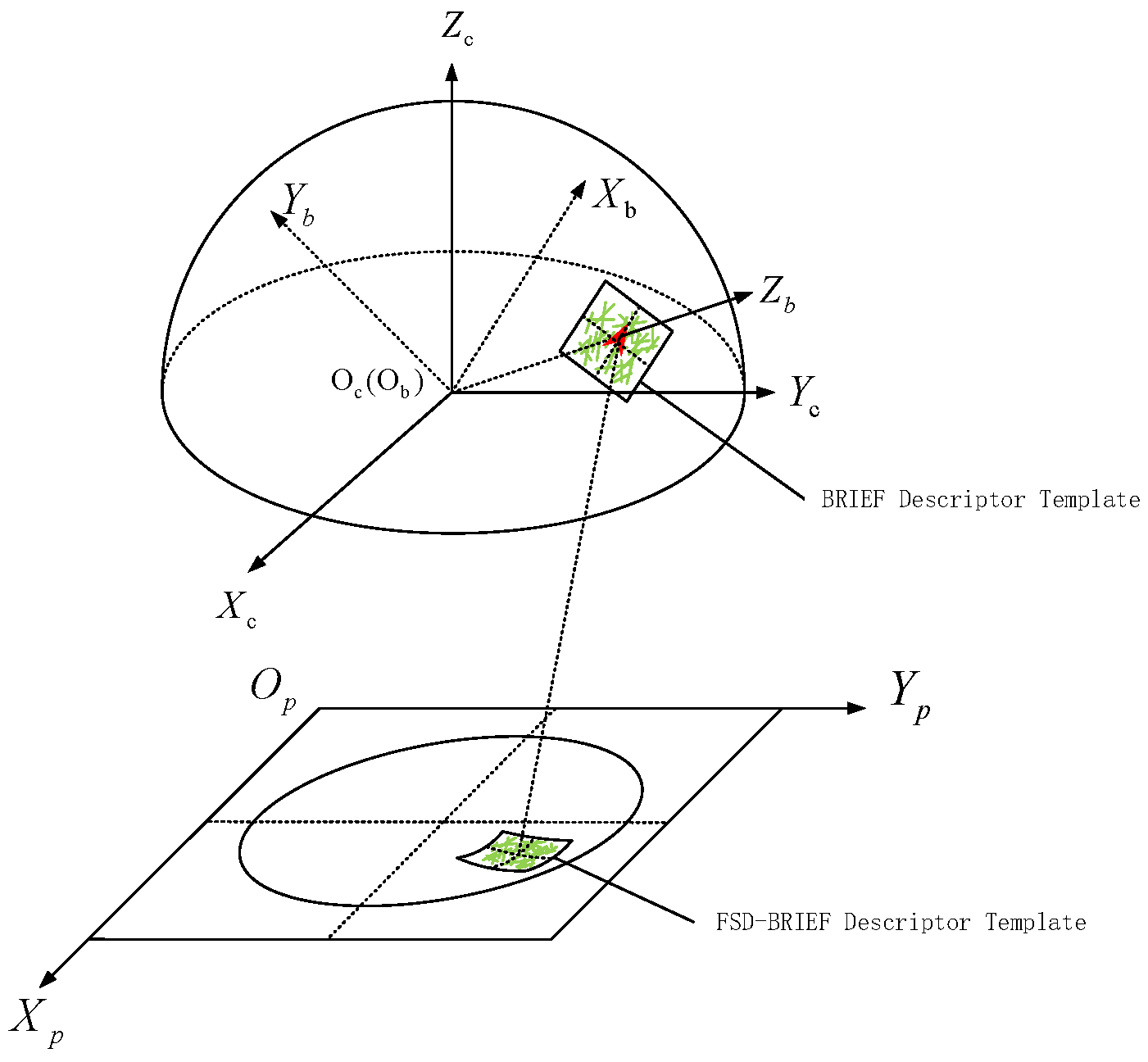
4.4. FSD-BRIEF Descriptor Extraction
- The center point of the descriptor template coincides with the projection point of the feature point on the sphere. In other words, the coordinate of point in the feature point attitude coordinate system is .
- The directions of , axis of BRIEF template coordinate system are consistent with the directions of , axis of the feature point attitude coordinate system.
- There is a scale factor between the coordinates in the BRIEF template coordinate system and the coordinates in the feature point attitude coordinate system.
5. Experimental Evaluation
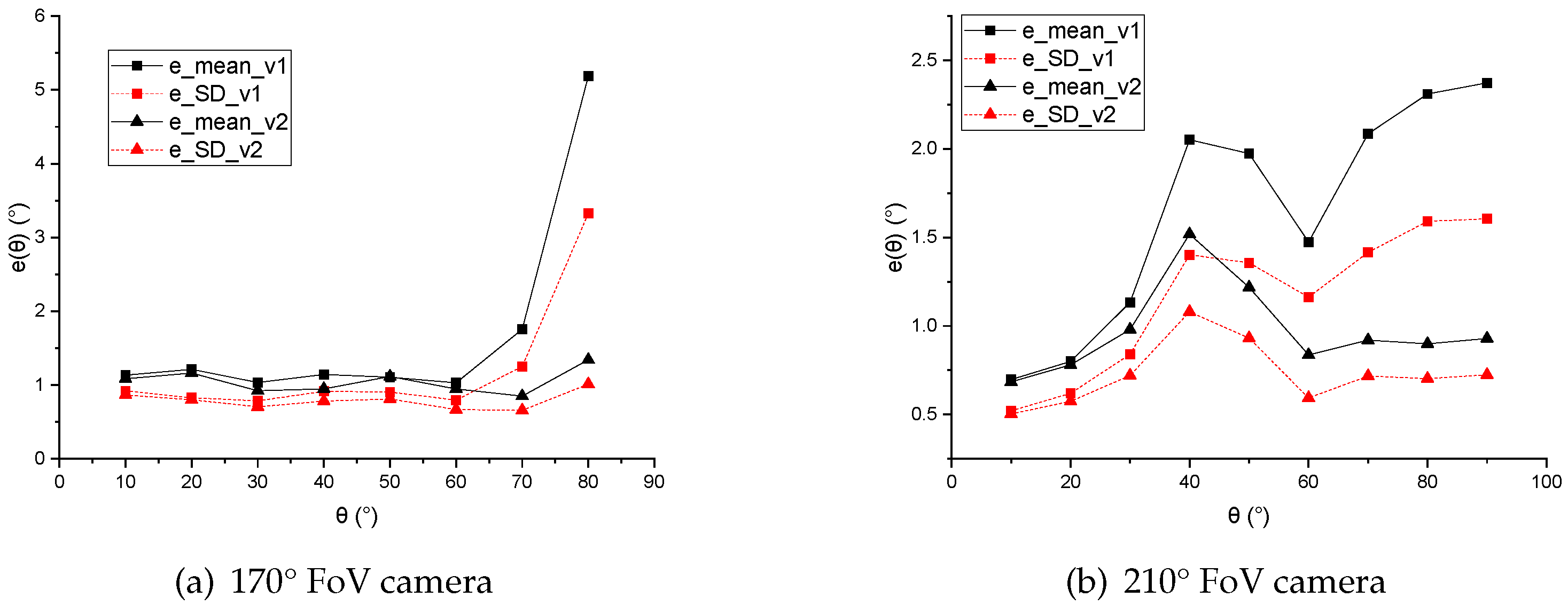
5.1. Experiment 1: The Contribution Evaluation of the Pixel Density Function to the Accuracy of Feature Point Orientation
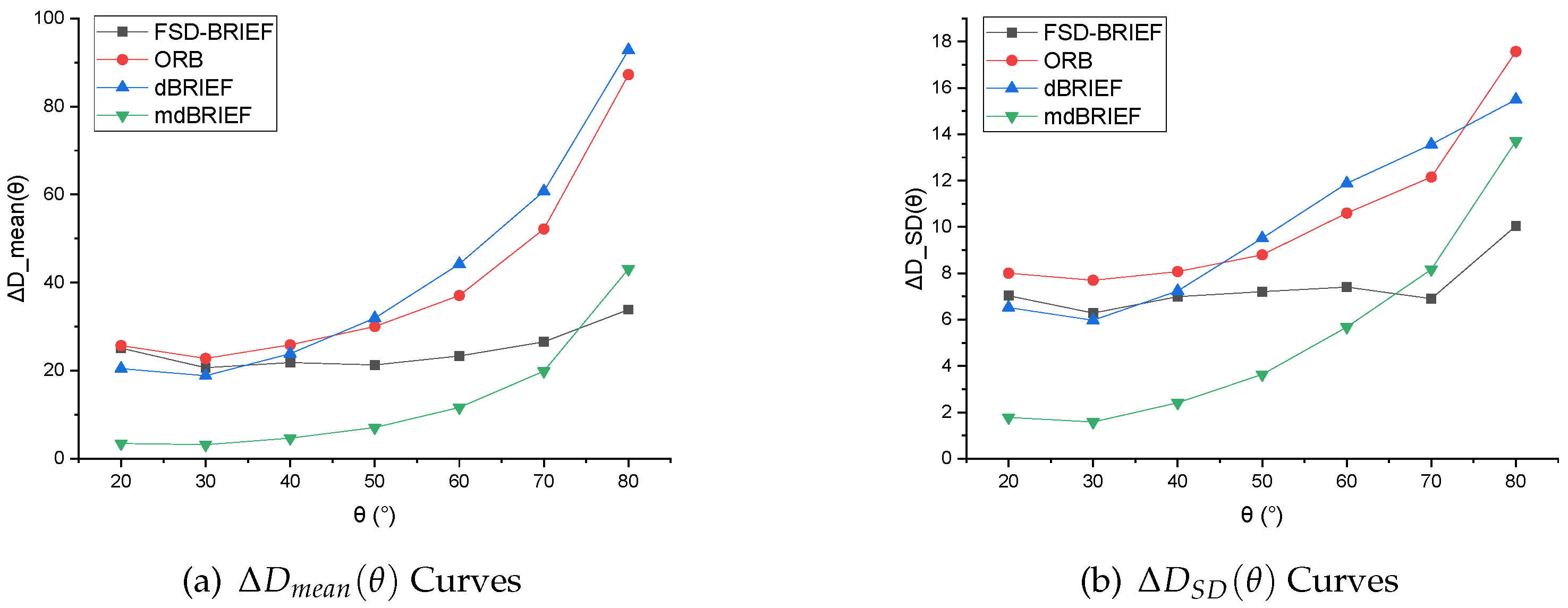
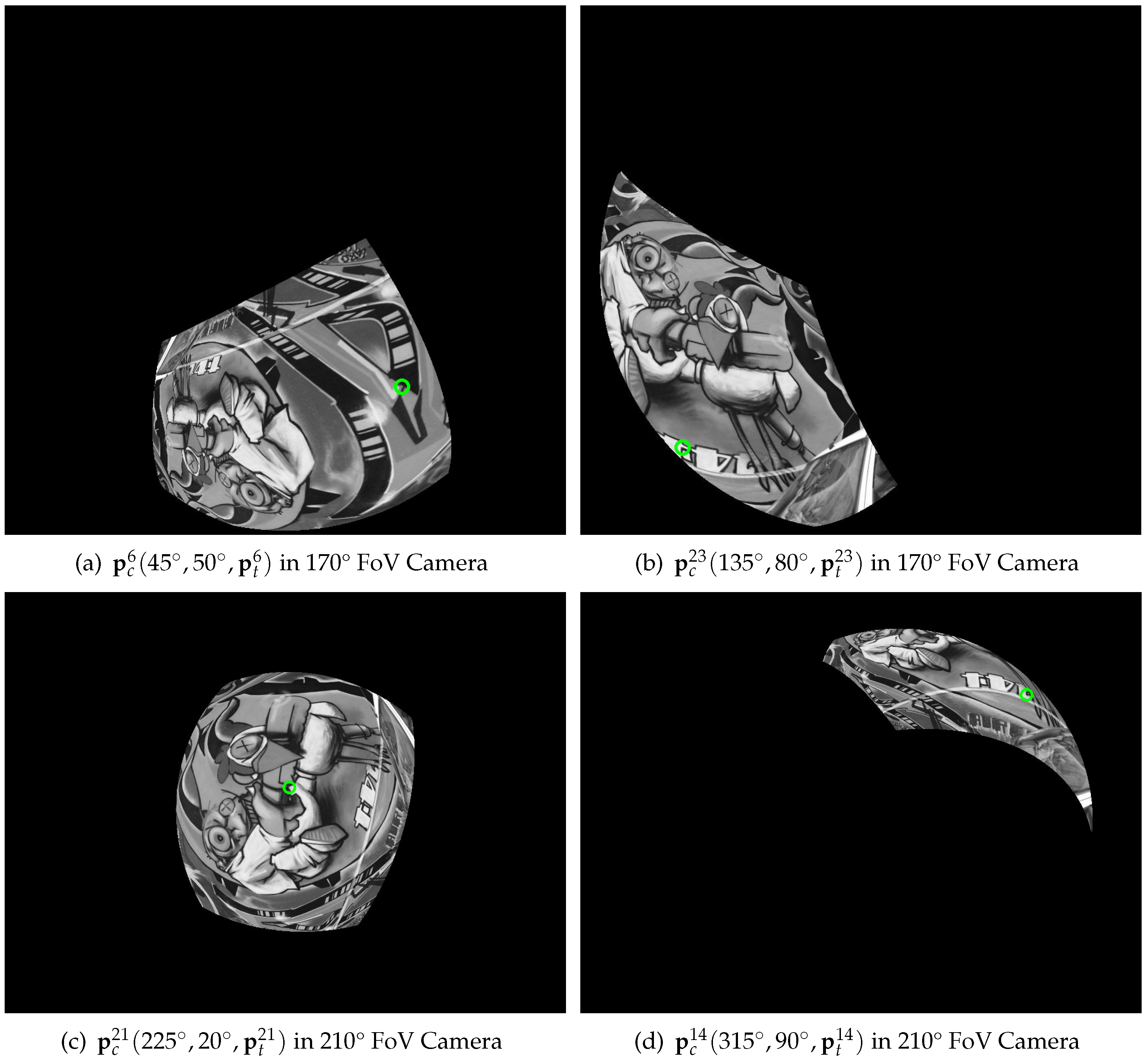
5.2. Experiment 2: Descriptor Invariance Evaluation of Fisheye Images in Different FoV Positions
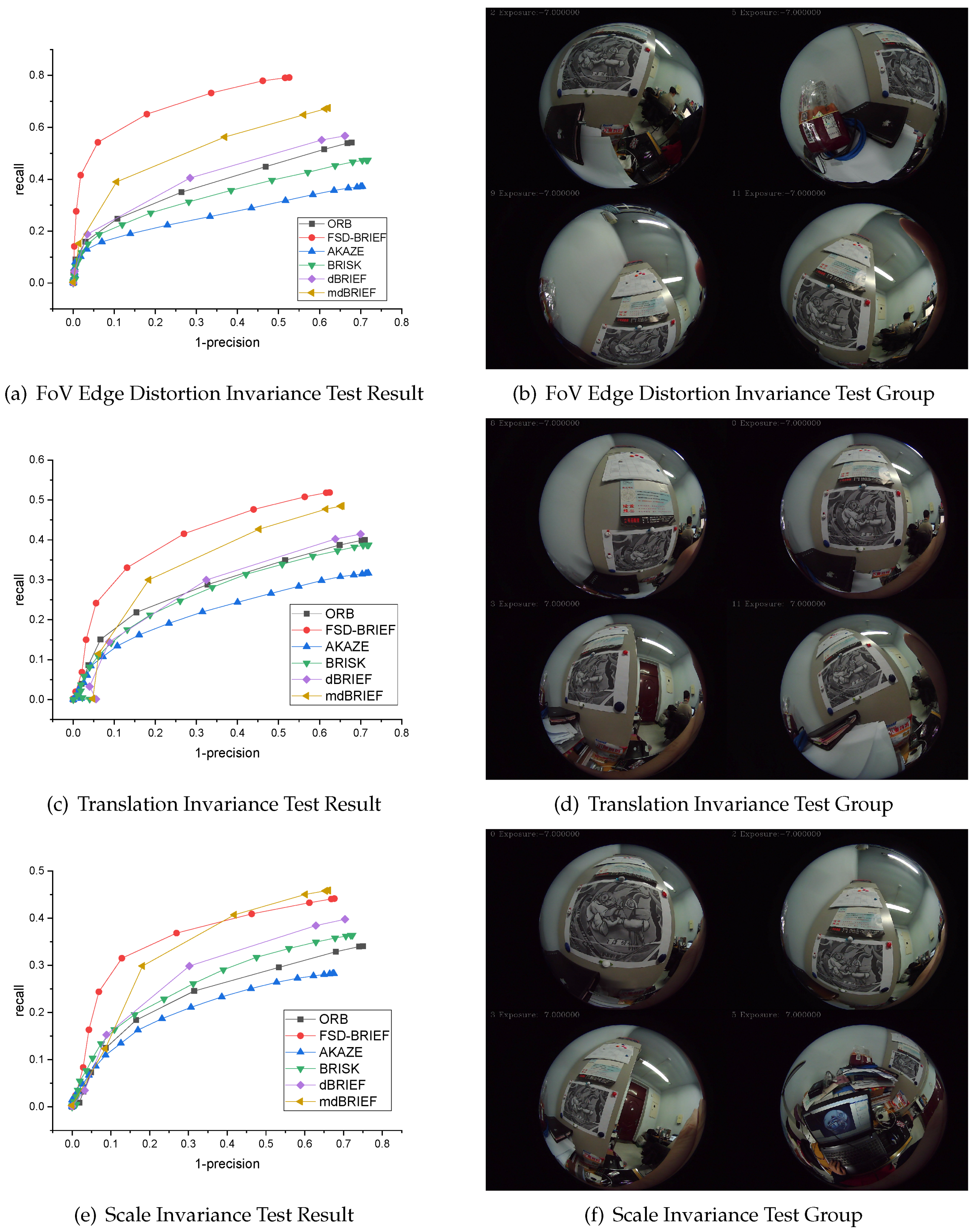
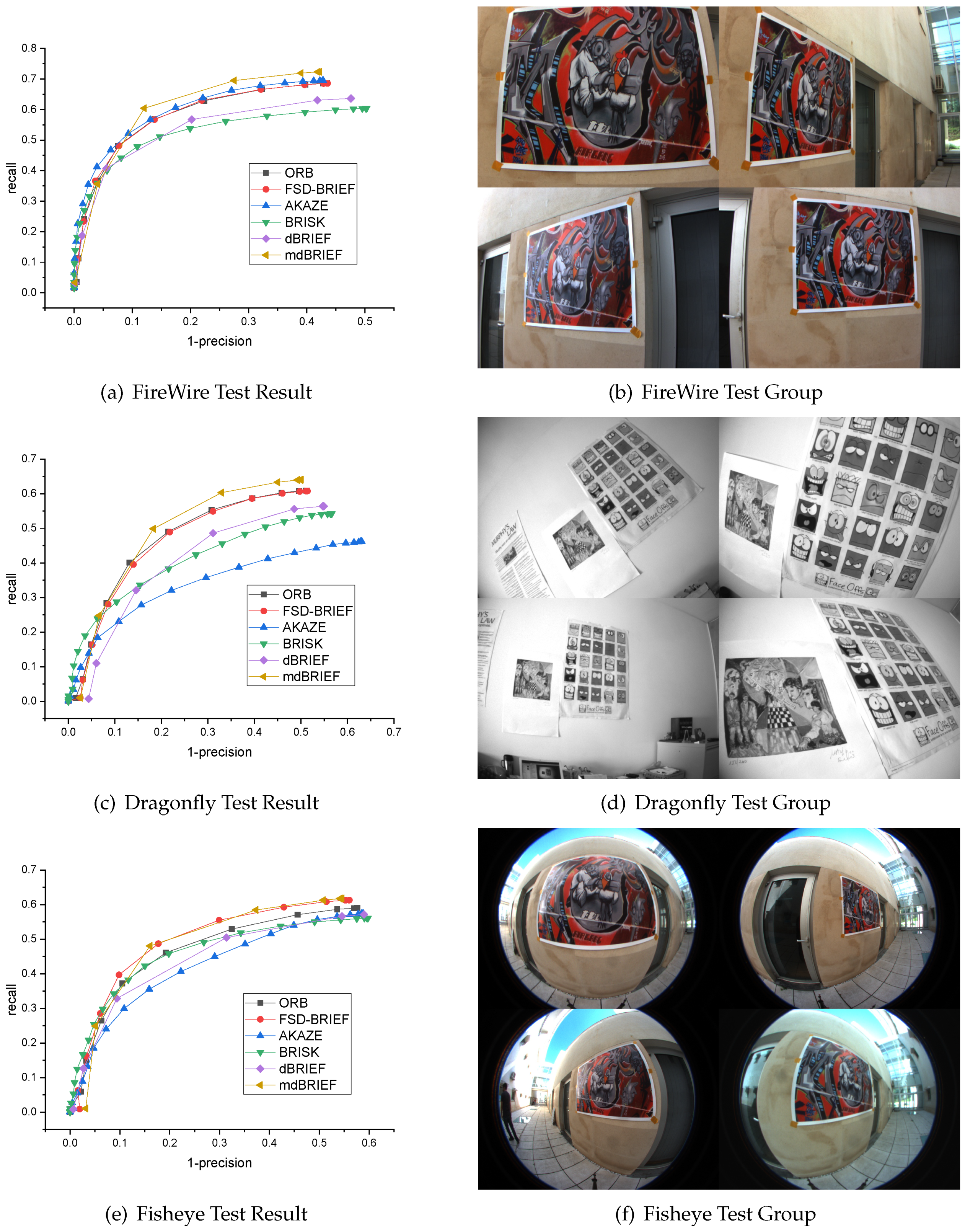
5.3. Experiment 3: Matching Performance Evaluation in Different Kind of Image Variance
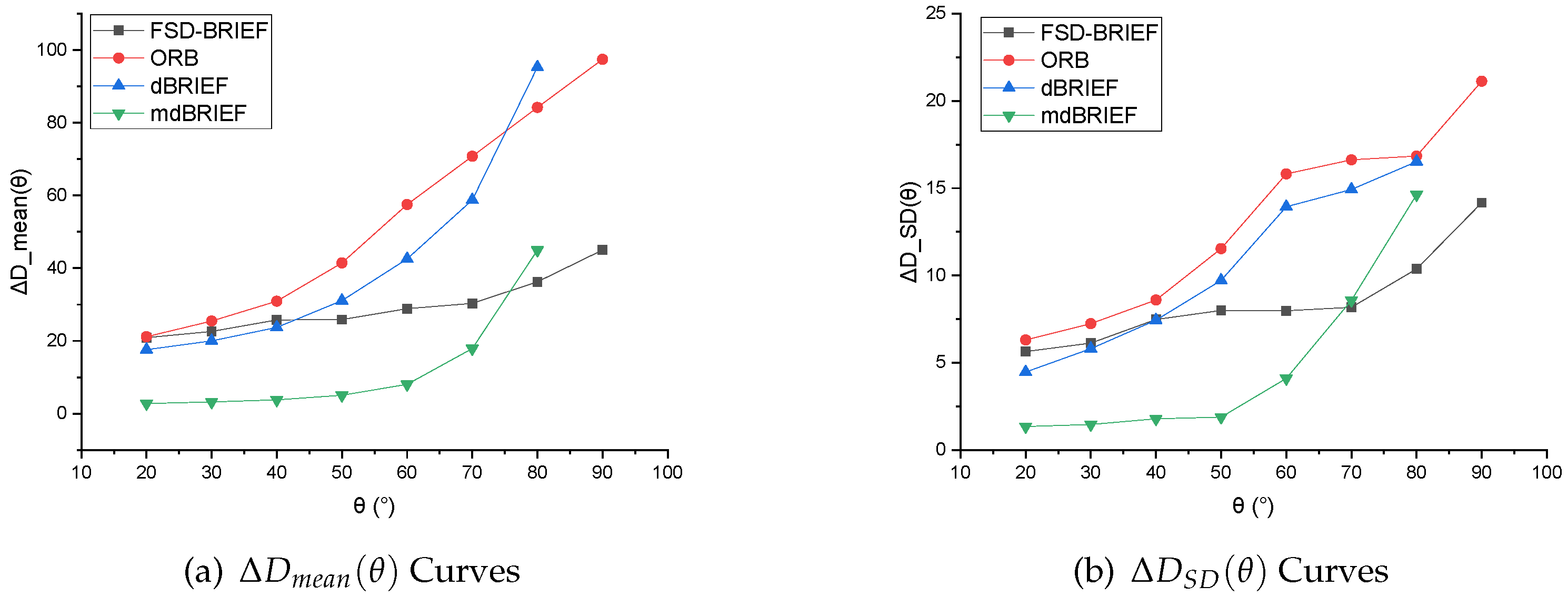
5.4. Experiment 4: Matching Performance Evaluation in Different Distortion Images
6. Conclusions
7. Future Work
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
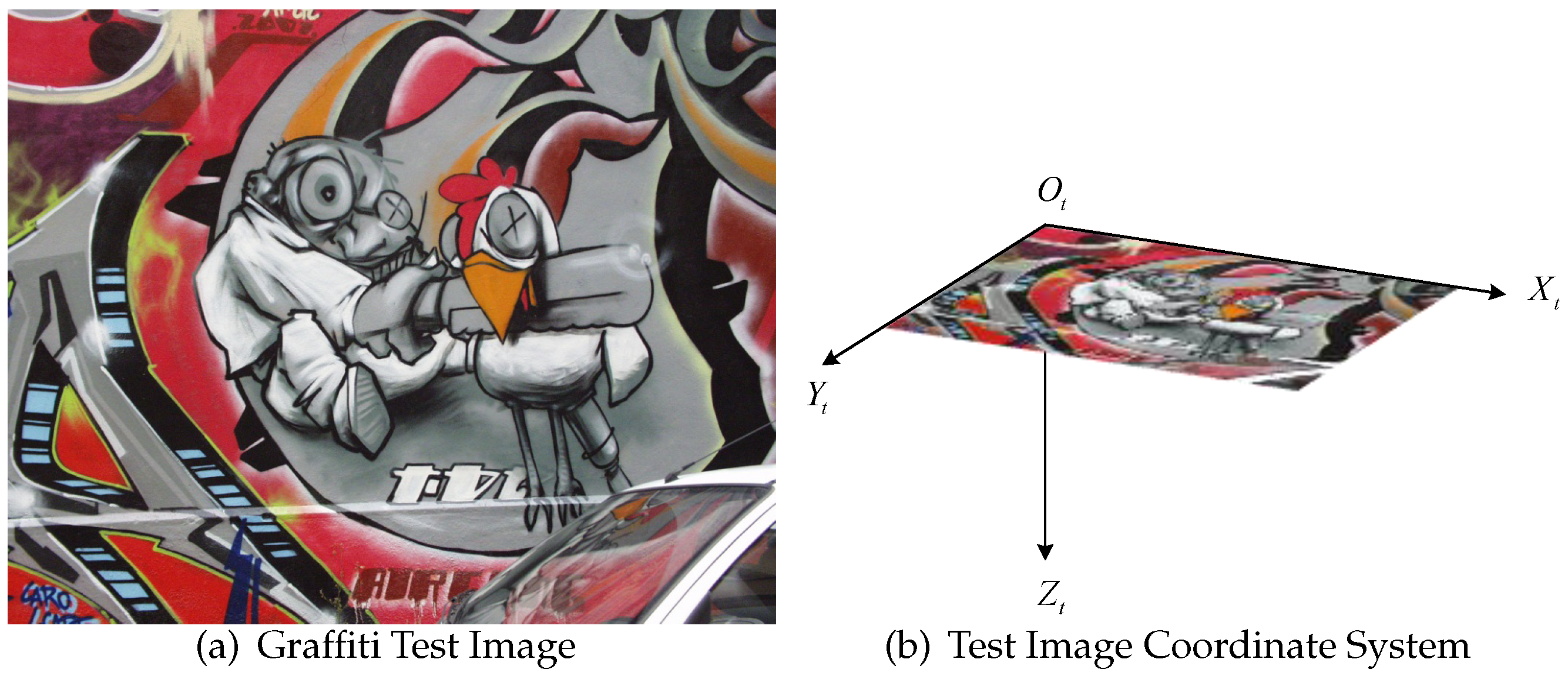
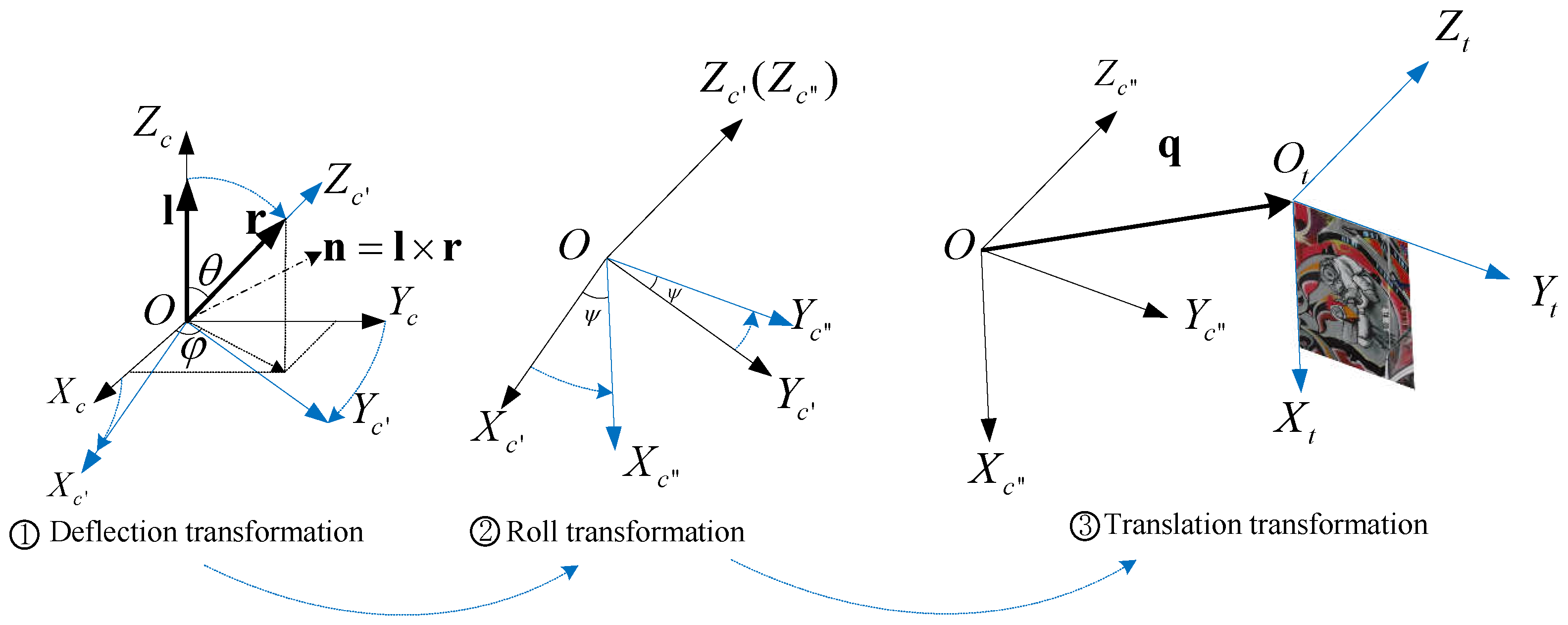
Appendix A. Coordinate Transformation for Virtual Dataset Generation


Appendix A.1. Deflection Transformation
Appendix A.2. Roll Transformation
Appendix A.3. Translation Transformation
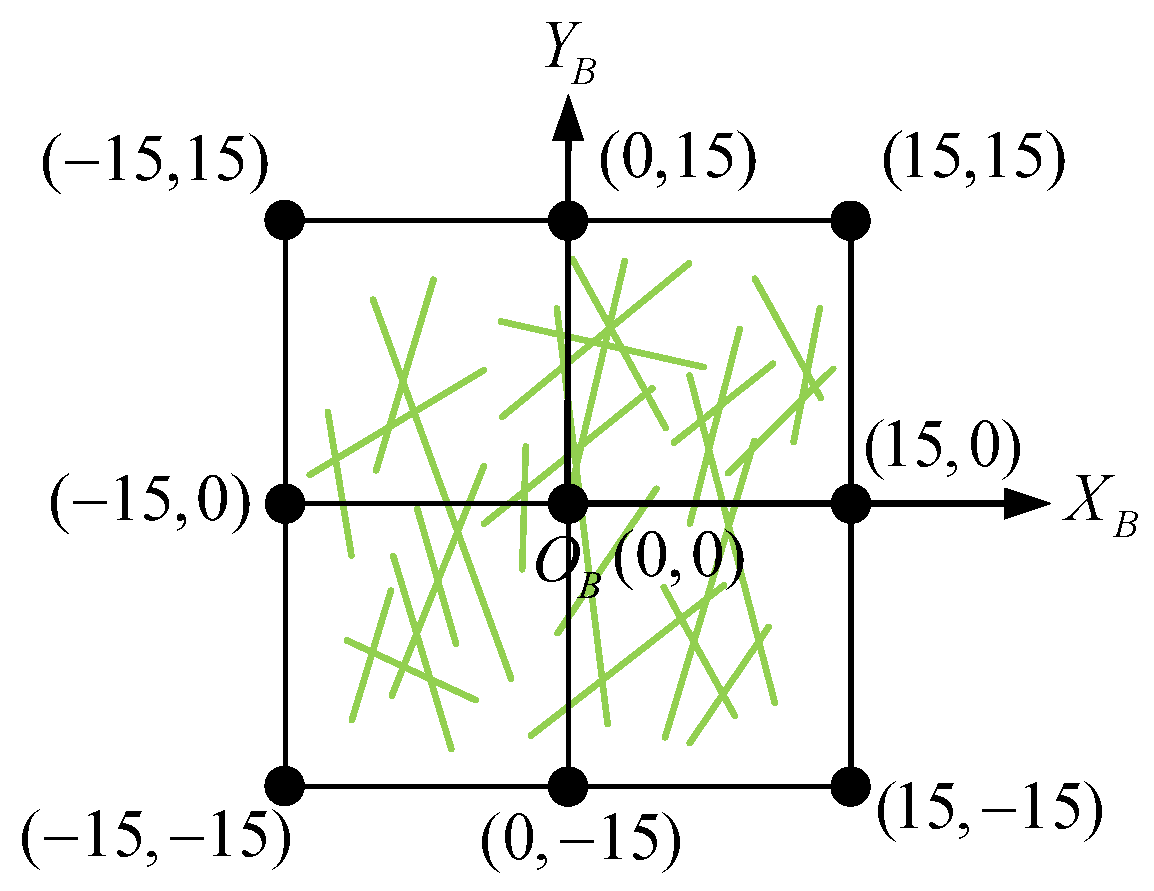
Appendix B. Virtual Dataset Generation
- As shown in Figure A3, ensure that the line is perpendicular to the test image plane , that is , so as to ensure that the circular neighborhood used to calculate the gray centroid of the feature point in the test image and the optical center of the camera forms a regular cone;
- Ensure that the length of is equal to the average values of the horizontal and vertical focal length of the virtual camera, so as to ensure that the circular area used for calculating the gray centroid of feature points in the original test image is approximately the same as that used to calculate the gray centroid of feature points in the fisheye image.

- Within the camera’s FoV, starting from , taking 10° as the interval, the angle is uniformly selected, and values of are generated.
- From 45° to 315°, is uniformly taken at 90° intervals, and the number of values generated is .
- When is 45° or 225°, the value of is taken as . When is 135° or 315°, the value of is taken as 0.

References
- Lowe, D.G. Object recognition from local scale-invariant features. Proc. IEEE Int. Conf. Comput. Vis. 1999, 2, 1150–1157. [Google Scholar]
- Bay, H.; Tuytelaars, T.; Gool, L.V. SURF: Speeded up robust features. In Computer Vision - ECCV 2006, Proceedings of the 9th European Conference on Computer Vision. Proceedings, Part I (Lecture Notes in Computer Science); Springer: Berlin/Heidelberg, Germany, 2006; Volume 3951, pp. 404–417. [Google Scholar]
- Calonder, M.; Lepetit, V.; Strecha, C.; Fua, P. BRIEF: Binary robust independent elementary features. Lect. Notes Comput. Sci. 2010, 6314 LNCS, 778–792. [Google Scholar]
- Rublee, E.; Rabaud, V.; Konolige, K.; Bradski, G. ORB: An efficient alternative to SIFT or SURF. In Proceedings of the 2011 IEEE International Conference on Computer Vision (ICCV 2011), Barcelona, Spain, 6–13 November 2011; pp. 2564–2571. [Google Scholar]
- Alcantarilla, P.F.; Bartoli, A.; Davison, A.J. KAZE features. Lect. Notes Comput. Sci. 2012, 7577 LNCS, 214–227. [Google Scholar]
- Leutenegger, S.; Chli, M.; Siegwart, R.Y. BRISK: Binary Robust invariant scalable keypoints. In Proceedings of the IEEE International Conference on Computer Vision, Barcelona, Spain, 6–13 November 2011; pp. 2548–2555. [Google Scholar]
- Ke, Y.; Sukthankar, R. PCA-SIFT: A more distinctive representation for local image descriptors. In Proceedings of the IEEE Computer Society Conference on Computer Vision and Pattern Recognition, Washington, DC, USA, 27 June–2 July 2004; Volume 2, pp. II506–II513. [Google Scholar]
- Liu, L.; Peng, F.y.; Zhao, K.; Wan, Y.p. Simplified SIFT algorithm for fast image matching. Infrared Laser Eng. 2008, 37, 181–184. [Google Scholar]
- Alcantarilla, P.F.; Nuevo, J.; Bartoli, A. Fast explicit diffusion for accelerated features in nonlinear scale spaces. In Proceedings of the BMVC 2013–Electronic Proceedings of the British Machine Vision Conference 2013, Bristol, UK, 9–13 September 2013. [Google Scholar]
- Tian, Y.; Fan, B.; Wu, F. L2-Net: Deep learning of discriminative patch descriptor in Euclidean space. In Proceedings of the 30th IEEE Conference on Computer Vision and Pattern Recognition, CVPR 2017, Honolulu, HI, USA, 21–26 July 2017; pp. 6128–6136. [Google Scholar]
- Mishchuk, A.; Mishkin, D.; Radenovi, F.; Matas, J. Working Hard to Know Your Neighbor’s Margins: Local Descriptor Learning Loss. arxiv 2017, arXiv:1705.10872. [Google Scholar]
- Mishkin, D.; Radenovic, F.; Matas, J. Repeatability Is Not Enough: Learning Affine Regions via Discriminability. In Proceedings of the ECCV, Munich, Germany, 8–14 September 2018. [Google Scholar]
- Campos, C.; Elvira, R.; Rodríguez, J.J.G.; Montiel, J.M.; Tardós, J.D. ORB-SLAM3: An Accurate Open-Source Library for Visual, Visual-Inertial and Multi-Map SLAM. arXiv 2020, arXiv:2007.11898. [Google Scholar]
- Urban, S.; Hinz, S. MultiCol-SLAM-a modular real-time multi-camera SLAM system arXiv. arXiv 2016, arXiv:1610.07336. [Google Scholar]
- Lin, Y.; Gao, F.; Qin, T.; Gao, W.; Liu, T.; Wu, W.; Yang, Z.; Shen, S. Autonomous aerial navigation using monocular visual-inertial fusion. J. Field Robot. 2018, 35, 23–51. [Google Scholar] [CrossRef]
- Miiller, M.G.; Steidle, F.; Schuster, M.J.; Lutz, P.; Maier, M.; Stoneman, S.; Tomic, T.; Sturzl, W. Robust Visual-Inertial State Estimation with Multiple Odometries and Efficient Mapping on an MAV with Ultra-Wide FOV Stereo Vision. In Proceedings of the 2018 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Madrid, Spain, 1–5 October 2018; pp. 3701–3708. [Google Scholar]
- Yahui, W.; Shaojun, C.; Shi-Jie, L.; Yun, L.; Yangyan, G.; Tao, L.; Ming-Ming, C. CubemapSLAM: A piecewise-pinhole monocular fisheye SLAM system. In Computer Vision-ACCV 2018, Proceedings of the 14th Asian Conference on Computer Vision. Revised Selected Papers: Lecture Notes in Computer Science (LNCS 11366); Jawahar, C., Li, H., Mori, G., Schindler, K., Eds.; Springer: Cham, Switzerland, 2019; Volume 11366, pp. 34–49. [Google Scholar]
- Scaramuzza, D.; Siegwart, R. Appearance-guided monocular omnidirectional visual odometry for outdoor ground vehicles. IEEE Trans. Robot. 2008, 24, 1015–1026. [Google Scholar] [CrossRef]
- Tardif, J.P.; Pavlidis, Y.; Daniilidis, K. Monocular visual odometry in urban environments using an omnidirectional camera. In Proceedings of the 2008 IEEE/RSJ International Conference on Intelligent Robots and Systems, IROS, Nice, France, 22–26 September 2008; pp. 2531–2538. [Google Scholar]
- Rituerto, A.; Puig, L.; Guerrero, J.J. Visual SLAM with an Omnidirectional Camera. In Proceedings of the 2010 20th International Conference on Pattern Recognition, Istanbul, Turkey, 23–26 August 2010; pp. 348–351. [Google Scholar] [CrossRef]
- Arican, Z.; Frossard, P. OmniSIFT: Scale invariant features in omnidirectional images. In Proceedings of the International Conference on Image Processing, ICIP, Hong Kong, China, 26–29 September 2010; pp. 3505–3508. [Google Scholar]
- Lourenco, M.; Barreto, J.P.; Vasconcelos, F. SRD-SIFT: Keypoint detection and matching in images with radial distortion. IEEE Trans. Robot. 2012, 28, 752–760. [Google Scholar] [CrossRef]
- Cruz Mota, J.; Bogdanova, I.; Paquier, B.; Bierlaire, M.; Thiran, J.P. Scale invariant feature transform on the sphere: Theory and applications. Int. J. Comput. Vis. 2012, 98, 217–241. [Google Scholar] [CrossRef]
- Hansen, P.; Corke, P.; Boles, W. Wide - angle visual feature matching for outdoor localization. Int. J. Robot. Res. 2010, 29, 267–297. [Google Scholar] [CrossRef]
- Zhao, Q.; Feng, W.; Wan, L.; Zhang, J. SPHORB: A Fast and Robust Binary Feature on the Sphere. Int. J. Comput. Vis. 2015, 113, 143–159. [Google Scholar] [CrossRef]
- Urban, S.; Weinmann, M.; Hinz, S. mdBRIEF-a fast online-adaptable, distorted binary descriptor for real-time applications using calibrated wide-angle or fisheye cameras. Comput. Vis. Image Underst. 2017, 162, 71–86. [Google Scholar] [CrossRef]
- Pourian, N.; Nestares, O. An End to End Framework to High Performance Geometry-Aware Multi-Scale Keypoint Detection and Matching in Fisheye Imag. In Proceedings of the International Conference on Image Processing, ICIP, Taipei, Taiwan, 22–25 September 2019; pp. 1302–1306. [Google Scholar]
- Kannala, J.; Brandt, S.S. A generic camera model and calibration method for conventional, wide-angle, and fish-eye lenses. IEEE Trans. Pattern Anal. Mach. Intell. 2006, 28, 1335–1340. [Google Scholar] [CrossRef] [PubMed]
- Viswanathan, D.G. Features from accelerated segment test (fast). In Proceedings of the 10th workshop on Image Analysis for Multimedia Interactive Services, London, UK, 6 May 2009; pp. 6–8. [Google Scholar]
- Mikolajczyk, K.; Schmid, C. A performance evaluation of local descriptors. IEEE Trans. Pattern Anal. Mach. Intell. 2005, 27, 1615–1630. [Google Scholar] [CrossRef] [PubMed]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Intrinsic Parameter | 170° FoV Camera | 210° FoV Camera |
|---|---|---|
| 284.977 | 257.28 | |
| 284.977 | 257.28 | |
| 423.039 | 582.006 | |
| 398.179 | 419.655 | |
| −0.00454 | −0.0765 | |
| 0.0396 | 0.00908 | |
| −0.0363 | −0.0117 | |
| 0.00584 | 0.00373 |
| θ (°) | Version 1 (Without Compensation) | Version 2 (With Compensation) | Error Reduction (%) | |||
|---|---|---|---|---|---|---|
| Mean | SD | Mean | SD | Mean | SD | |
| 10 | 1.133 | 0.920 | 1.084 | 0.865 | −4.306 | −5.978 |
| 20 | 1.213 | 0.827 | 1.162 | 0.800 | −4.140 | −3.360 |
| 30 | 1.034 | 0.786 | 0.922 | 0.703 | −10.895 | −10.452 |
| 40 | 1.143 | 0.914 | 0.948 | 0.782 | −17.111 | −14.451 |
| 50 | 1.106 | 0.905 | 1.116 | 0.811 | 0.895 | −10.367 |
| 60 | 1.030 | 0.796 | 0.947 | 0.668 | −8.033 | −16.065 |
| 70 | 1.756 | 1.251 | 0.849 | 0.656 | −51.629 | −47.526 |
| 80 | 5.185 | 3.326 | 1.342 | 1.011 | −74.123 | −69.592 |
| θ (°) | Version 1 (Without Compensation) | Version 2 (With Compensation) | Error Reduction (%) | |||
|---|---|---|---|---|---|---|
| Mean | SD | Mean | SD | Mean | SD | |
| 10 | 0.697 | 0.521 | 0.684 | 0.504 | −1.850 | −3.322 |
| 20 | 0.800 | 0.620 | 0.781 | 0.574 | −2.425 | −7.339 |
| 30 | 1.134 | 0.840 | 0.980 | 0.720 | −13.540 | −14.277 |
| 40 | 2.052 | 1.402 | 1.518 | 1.080 | −25.995 | −22.989 |
| 50 | 1.974 | 1.357 | 1.218 | 0.932 | −38.280 | −31.344 |
| 60 | 1.474 | 1.163 | 0.837 | 0.594 | −43.226 | −48.942 |
| 70 | 2.085 | 1.415 | 0.920 | 0.717 | −55.880 | −49.322 |
| 80 | 2.310 | 1.591 | 0.899 | 0.703 | −61.068 | −55.838 |
| 90 | 2.373 | 1.605 | 0.929 | 0.725 | −60.838 | −54.859 |
| θ (°) | FSD-BRIEF | ORB | dBRIEF | mdBRIEF | ||||
|---|---|---|---|---|---|---|---|---|
| Mean | SD | Mean | SD | Mean | SD | Mean | SD | |
| 20 | 25.100 | 7.033 | 25.692 | 8.005 | 20.458 | 6.520 | 3.458 | 1.779 |
| 30 | 20.658 | 6.284 | 22.767 | 7.700 | 18.833 | 5.974 | 3.192 | 1.583 |
| 40 | 21.825 | 6.994 | 25.867 | 8.073 | 23.850 | 7.237 | 4.667 | 2.413 |
| 50 | 21.300 | 7.209 | 30.017 | 8.798 | 31.917 | 9.516 | 7.083 | 3.635 |
| 60 | 23.325 | 7.407 | 37.050 | 10.598 | 44.217 | 11.882 | 11.633 | 5.680 |
| 70 | 26.533 | 6.904 | 52.175 | 12.154 | 60.742 | 13.563 | 19.883 | 8.170 |
| 80 | 33.850 | 10.045 | 87.233 | 17.572 | 92.792 | 15.495 | 43.083 | 13.704 |
| θ (°) | FSD-BRIEF | ORB | dBRIEF | mdBRIEF | ||||
|---|---|---|---|---|---|---|---|---|
| Mean | SD | Mean | SD | Mean | SD | Mean | SD | |
| 20 | 20.892 | 5.639 | 21.158 | 6.309 | 17.600 | 4.467 | 2.775 | 1.345 |
| 30 | 22.608 | 6.125 | 25.467 | 7.242 | 20.000 | 5.804 | 3.208 | 1.460 |
| 40 | 25.767 | 7.475 | 30.925 | 8.592 | 23.708 | 7.439 | 3.792 | 1.788 |
| 50 | 25.875 | 7.996 | 41.442 | 11.538 | 31.083 | 9.718 | 5.058 | 1.881 |
| 60 | 28.867 | 7.978 | 57.508 | 15.822 | 42.558 | 13.937 | 8.058 | 4.101 |
| 70 | 30.317 | 8.176 | 70.775 | 16.628 | 58.758 | 14.927 | 17.892 | 8.579 |
| 80 | 36.250 | 10.375 | 84.217 | 16.844 | 95.292 | 16.522 | 44.975 | 14.635 |
| 90 | 45.000 | 14.170 | 97.450 | 21.129 | - | - | - | - |
| Intrinsic Parameter | set1(FireWire) | set2(Dragonfly) | set3(Fisheye) |
|---|---|---|---|
| 539.389 | 528.626 | 306.780 | |
| 539.389 | 528.626 | 306.780 | |
| 312.103 | 365.029 | 634.729 | |
| 233.050 | 228.558 | 478.546 | |
| 0.0537 | −0.0994 | −0.000788 | |
| 0.0871 | −0.0205 | 0.0181 | |
| 0 | 0.00661 | −0.0117 | |
| 0 | 0.0150 | 0.00190 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, Y.; Song, J.; Ding, Y.; Yuan, Y.; Wei, H.-L. FSD-BRIEF: A Distorted BRIEF Descriptor for Fisheye Image Based on Spherical Perspective Model. Sensors 2021, 21, 1839. https://doi.org/10.3390/s21051839
Zhang Y, Song J, Ding Y, Yuan Y, Wei H-L. FSD-BRIEF: A Distorted BRIEF Descriptor for Fisheye Image Based on Spherical Perspective Model. Sensors. 2021; 21(5):1839. https://doi.org/10.3390/s21051839
Chicago/Turabian StyleZhang, Yutong, Jianmei Song, Yan Ding, Yating Yuan, and Hua-Liang Wei. 2021. "FSD-BRIEF: A Distorted BRIEF Descriptor for Fisheye Image Based on Spherical Perspective Model" Sensors 21, no. 5: 1839. https://doi.org/10.3390/s21051839
APA StyleZhang, Y., Song, J., Ding, Y., Yuan, Y., & Wei, H.-L. (2021). FSD-BRIEF: A Distorted BRIEF Descriptor for Fisheye Image Based on Spherical Perspective Model. Sensors, 21(5), 1839. https://doi.org/10.3390/s21051839