
A Comparative Analysis of Signal Decomposition Techniques for Structural Health Monitoring on an Experimental Benchmark



Abstract
:1. Introduction
Adaptive Mode Decomposition Methods
2. Theoretical Background
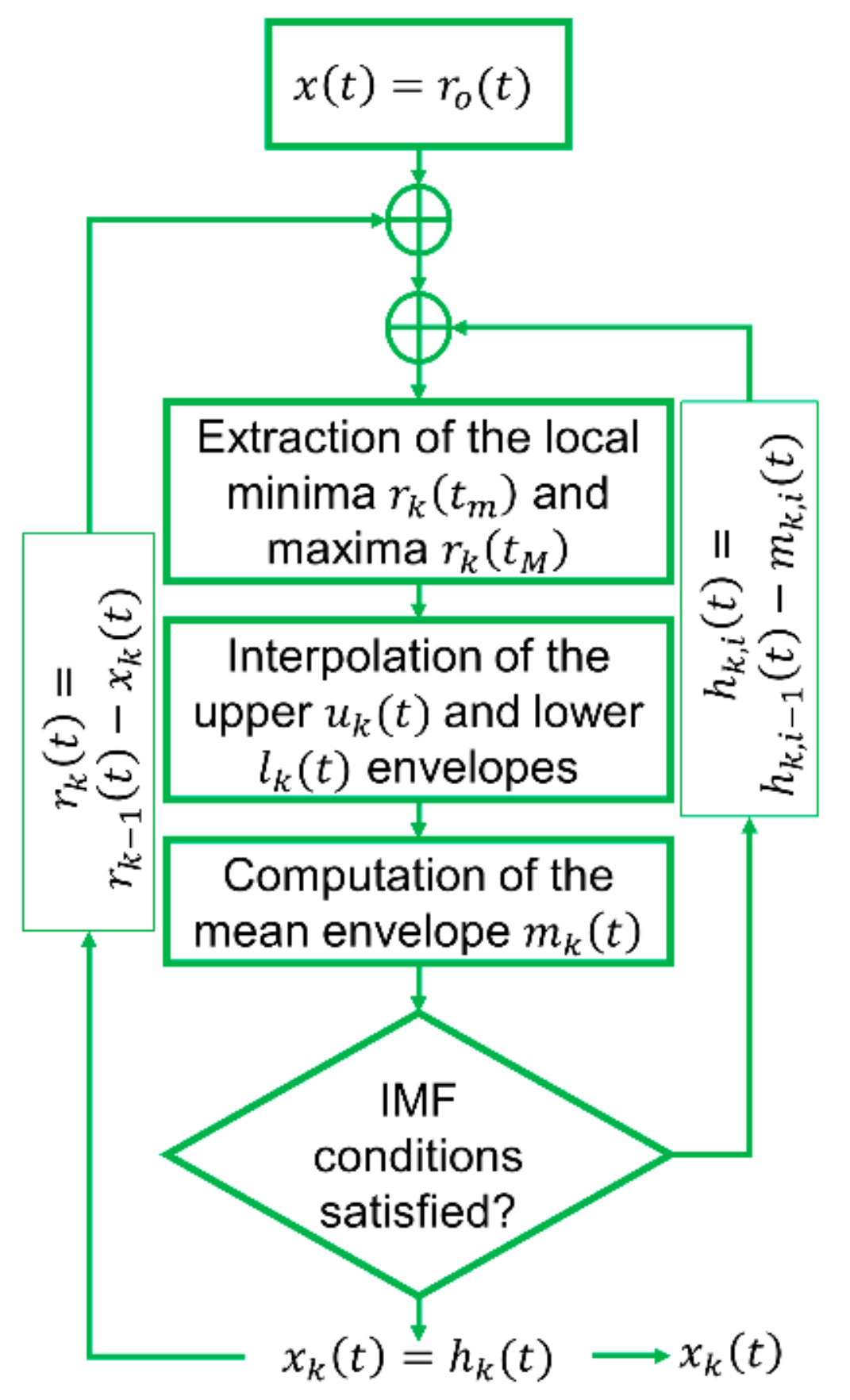
2.1. Empirical Mode Decomposition (EMD) and Derived Algorithms
- The number of local maxima and minima and the number of points where it assumes a zero value must be equal or at most differ by one unit;
- The local mean, defined as the mean of the upper hand lower envelopes, must be zero.
The Hilbert Transform
2.2. Hilbert Vibration Decomposition (HVD)
- The instantaneous frequency of the vibration component with the largest energy content (i.e., amplitude) is estimated;
- The envelope of the same is extracted;
- The component is subtracted from the signal.
2.3. Variational Mode Decomposition (VMD)
- For each mode , the associated analytic signal is computed employing the Hilbert transform. The result is a unilateral frequency spectrum (the negative frequencies of the FT spectrum are discarded, as they do not have physical meaning and are superfluous due to the Hermitian symmetry);
- Each mode’s spectrum is re-centred on the estimated centre (angular) frequency by mixing with a tuned exponential function;
- The bandwidth is eventually estimated through the Gaussian smoothness of the demodulated signal, which is the squared Euclidean norm (-norm) of the gradient.
2.4. Qualitative Comparison of the Techniques
3. The Numerical and Experimental Case Studies
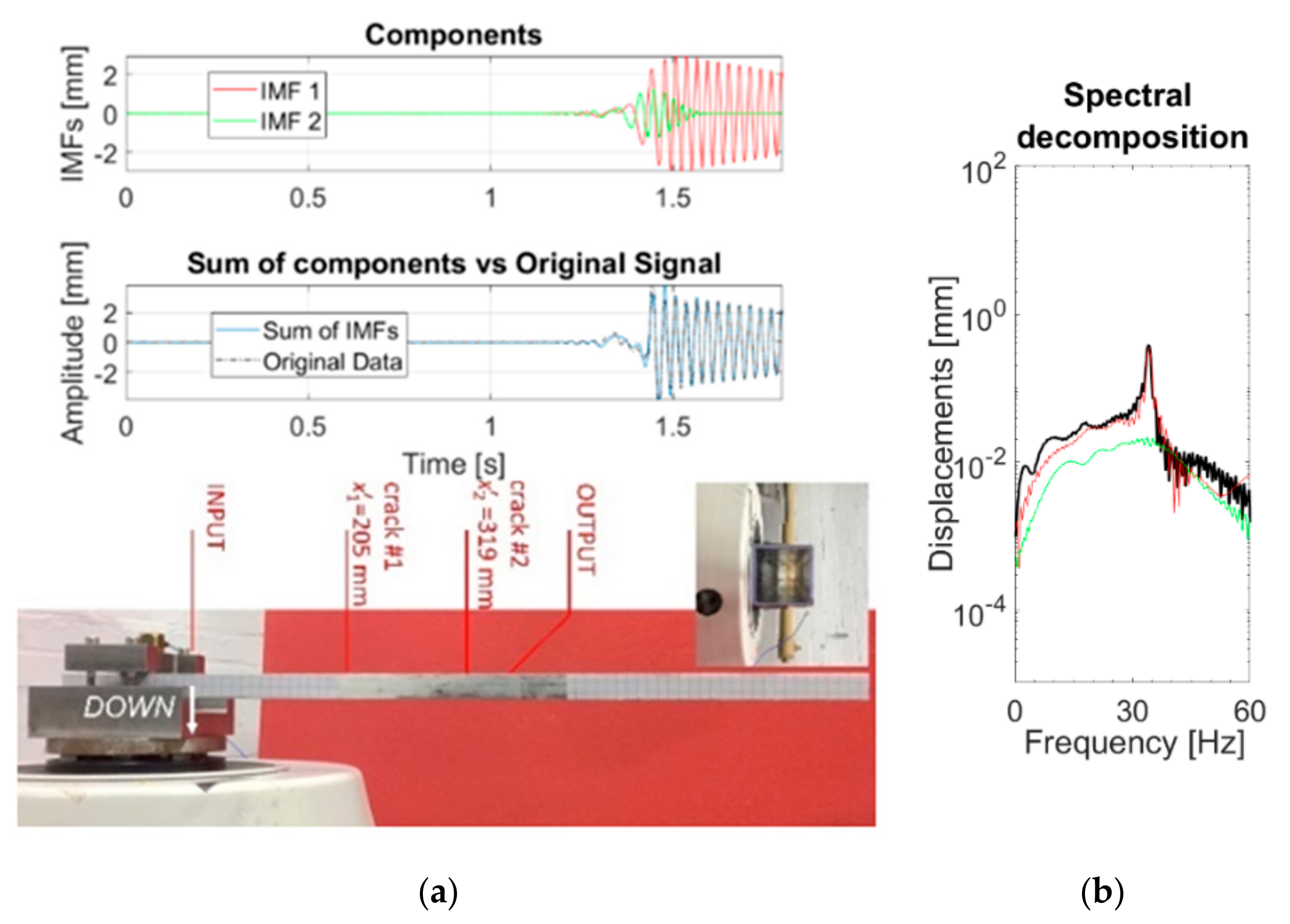
3.1. The Numerical Dataset
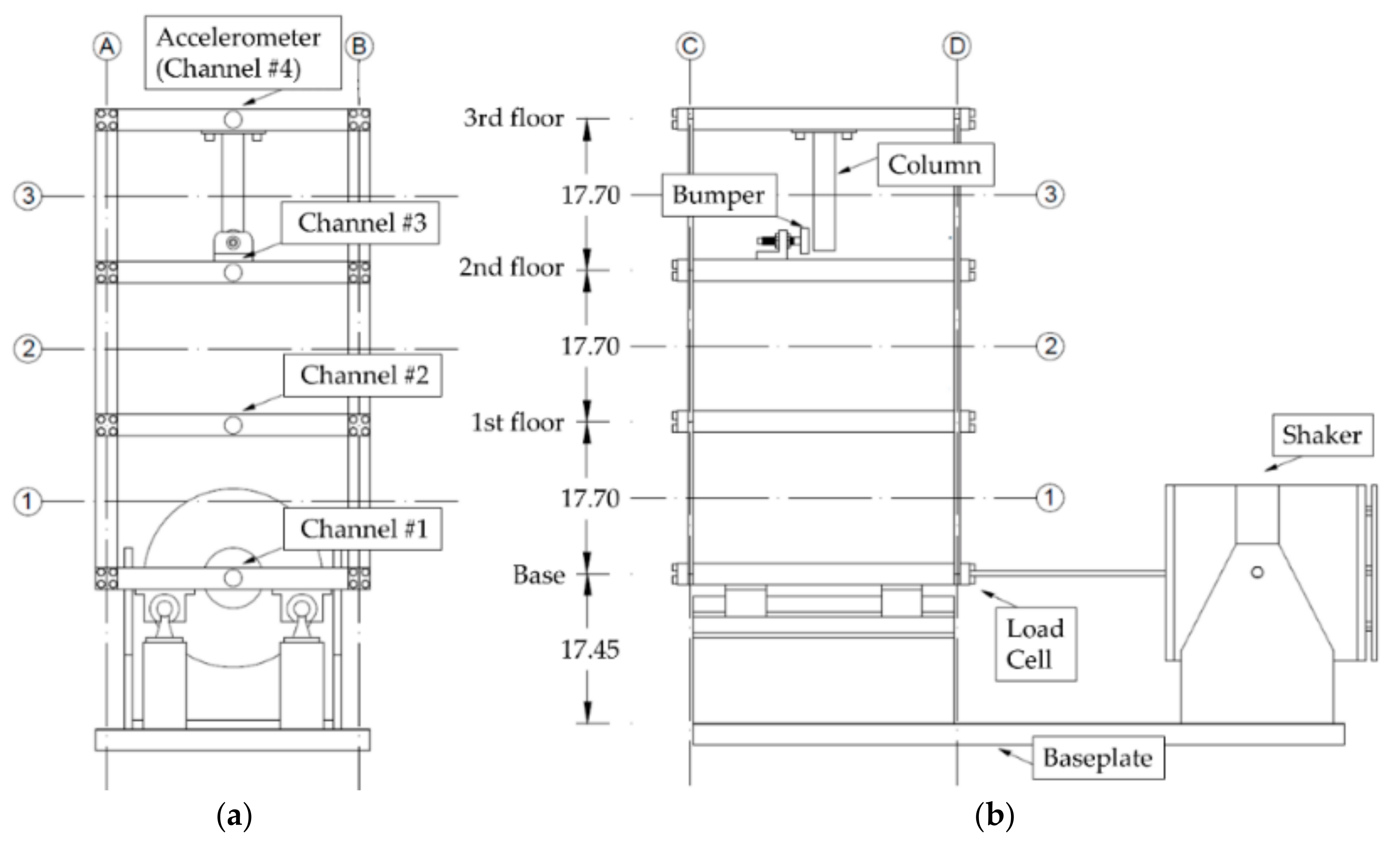
3.2. The LANL Benchmark
The Experimental Campaign
4. Results
- For the CEEMDAN, the improved version of the code described in Ref. [30] has been utilised. This requires the following inputs:
- The maximum number of sifting iterations allowed;
- The number of WGN realisations;
- The standard deviation of the applied noise.
Here, a noise SD of was applied for , with a maximum of 3000 sifting iterations. Noteworthy, the original implementation of the code uses a pseudorandom number generator to generate the WGN realisations; this may affect the replicability of the results. - For the HVD, the original scripts released by Feldman for use with his book (Ref. [41]) have been applied. The user-defined parameters, which should be inserted manually, are:
- The filter cut-off frequency (suggested to be in the range );
- The number K of modes to be extracted.
In this study, was set to the recommended minimum value of . Regarding K, this parameter was set to 3 to represent the a priori knowledge of the user (i.e., that the mechanical system can be well-approximated by a three DoF oscillator). - For the VMD, the original code has been used (released in 2013 by the authors and downloadable at https://math.montana.edu/dzosso/code/index.html, last visited 20 October 2020). An official MatLab implementation has been made available in the Wavelet Toolbox (https://it.mathworks.com/help/wavelet/ref/vmd.html; last visited 20 October 2020) since early 2020; however, this latter version has not been tested here. The arbitrarily defined parameters, which may influence the final results, are
- The initial values of and : and , which are generally all assumed as zeros at the first iteration, while the frequencies in can be initially zeroed, uniformly distributed, or random;
- α, the balancing parameter that defines the data-fidelity constraint;
- τ, the time-step of the dual ascent that determines the updating of the Lagrangian multipliers (generally defined to have an exact reconstruction or to achieve denoising);
- , the tolerance of the stopping criterion (generally around );
- The number K of modes to be extracted.
4.1. Preliminary Results for Noise Sensitivity and Sensor Placement
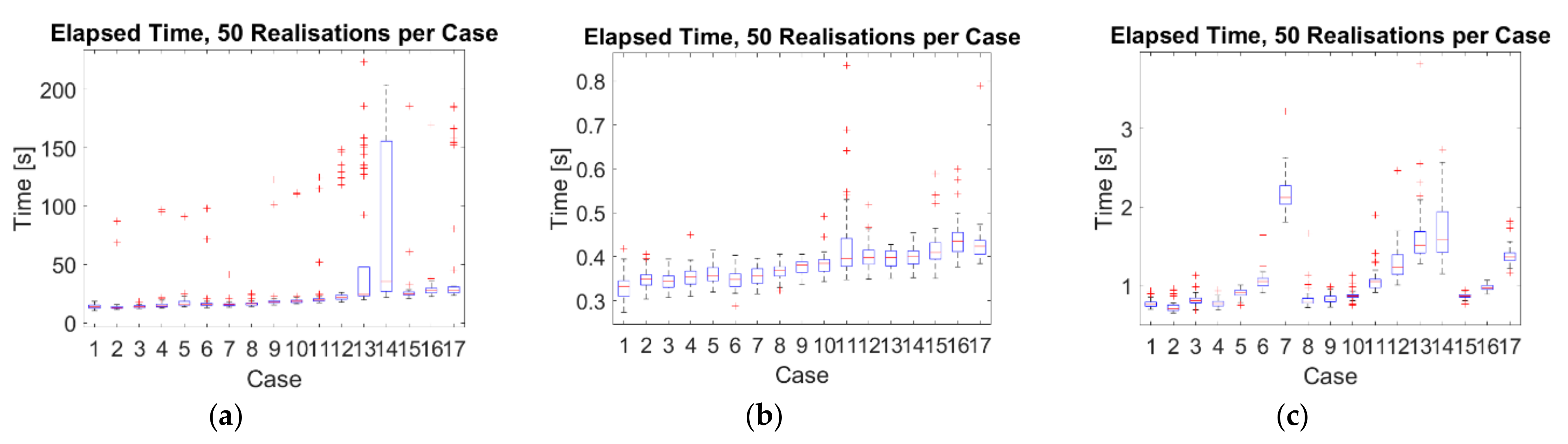
4.2. Computational Time Required
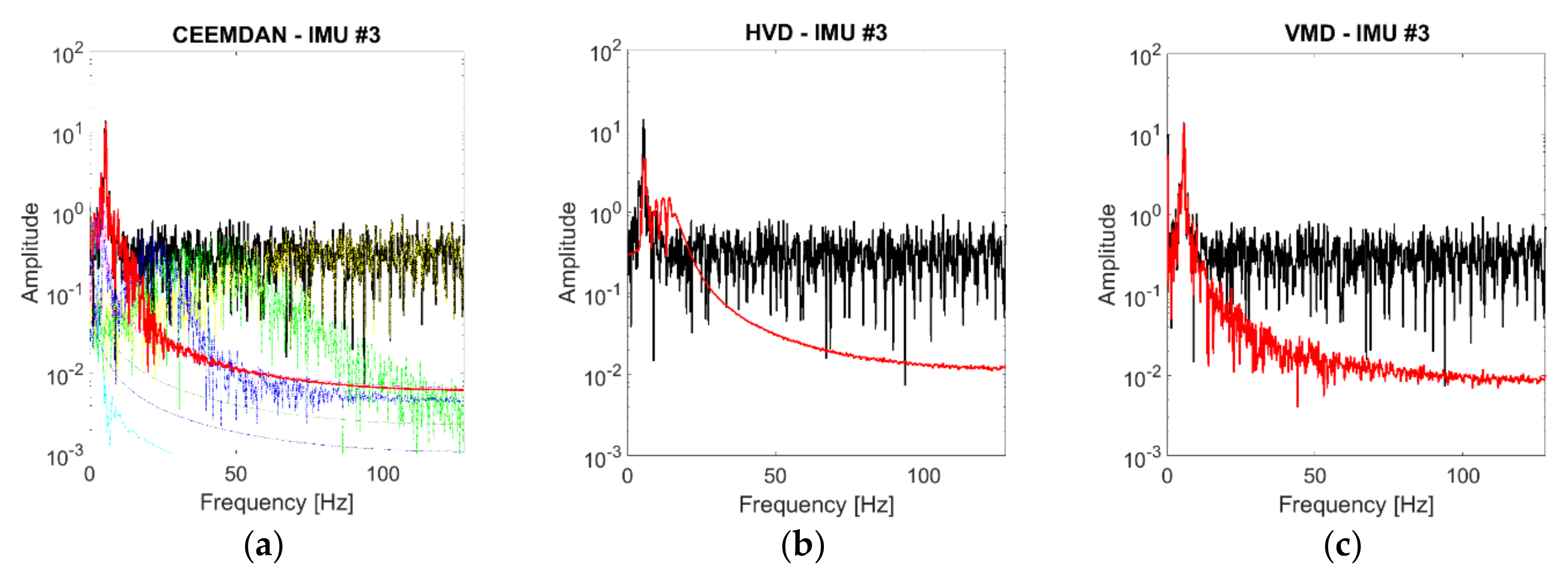
4.3. CEEMDAN IMFs
4.4. HVD IMFs
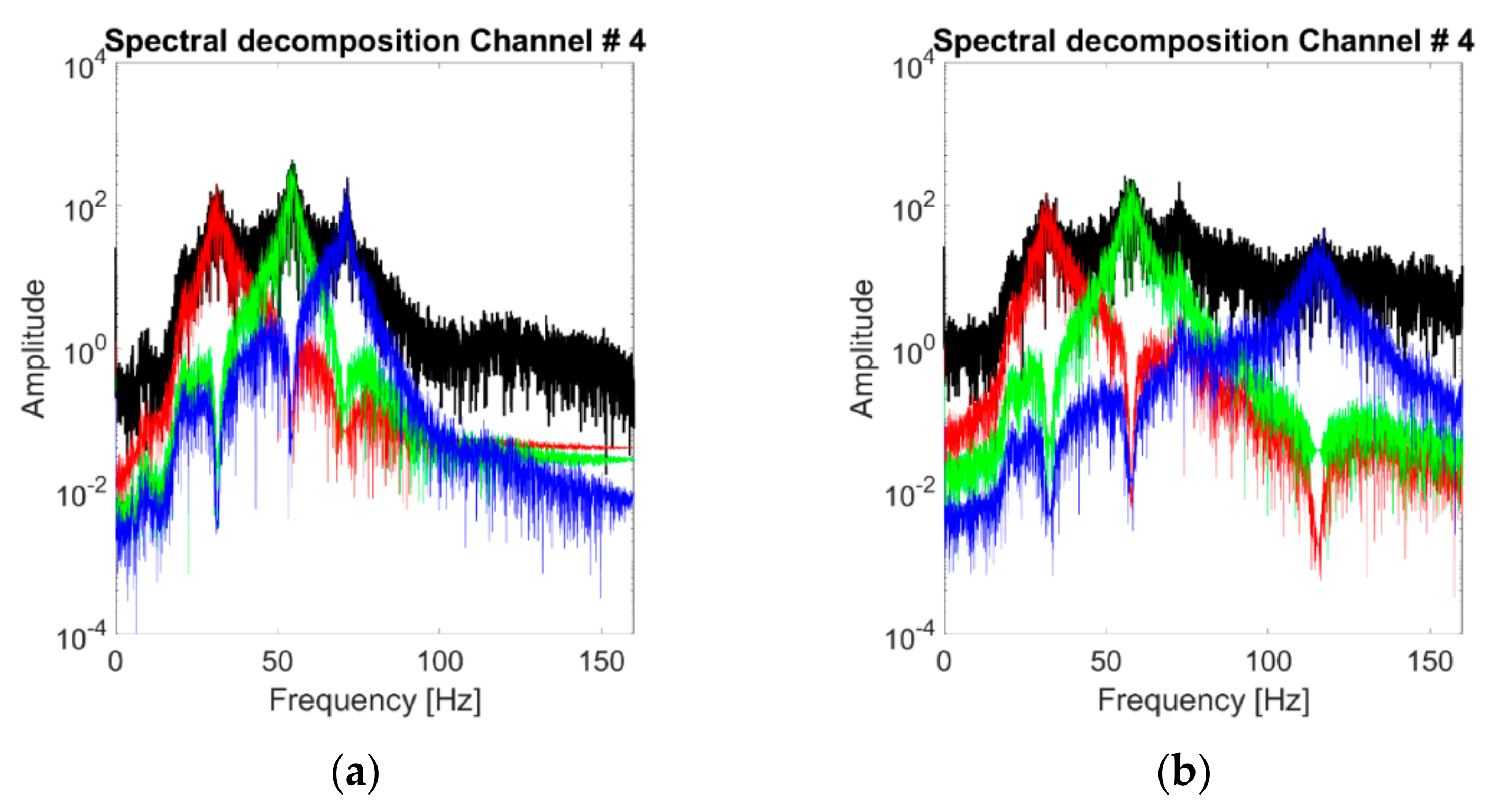
4.5. VMD IMFs
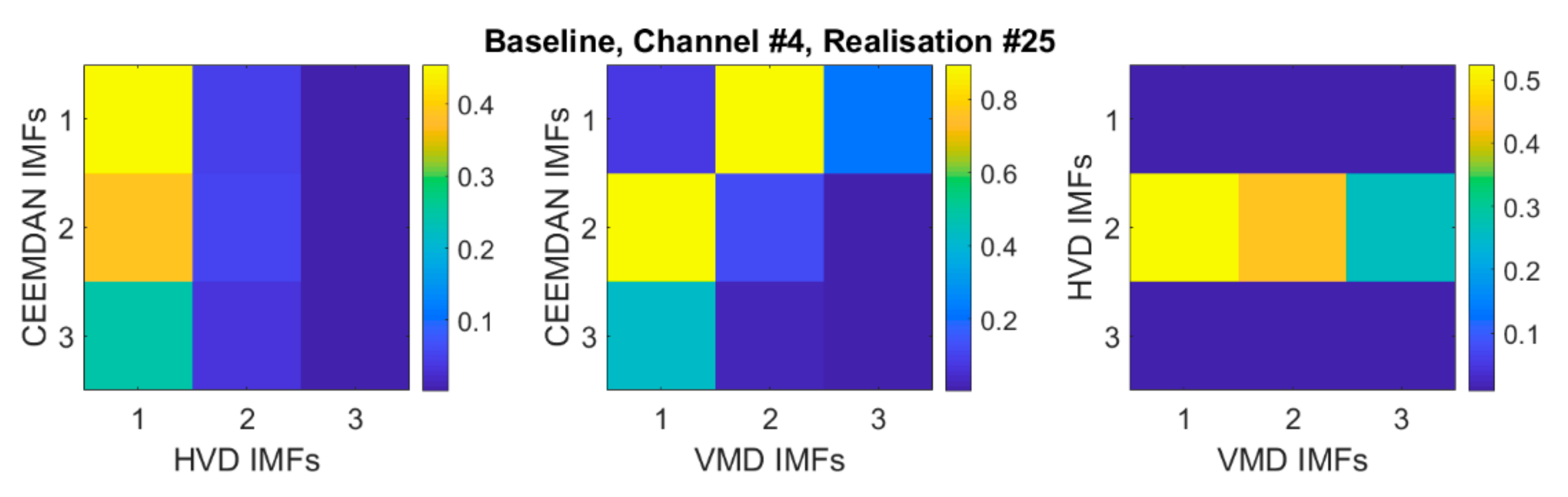
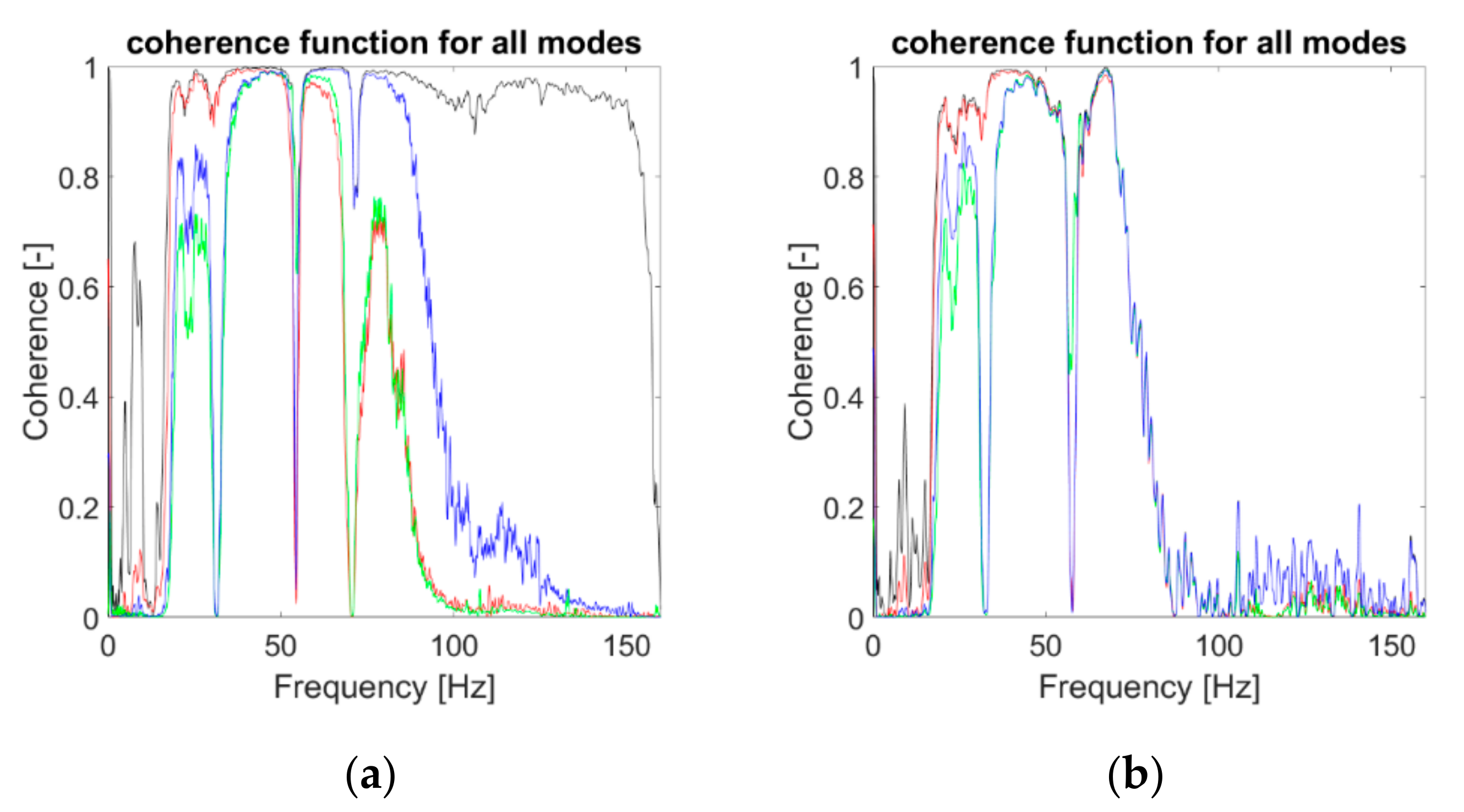
4.6. Comparability of the Extracted Modes
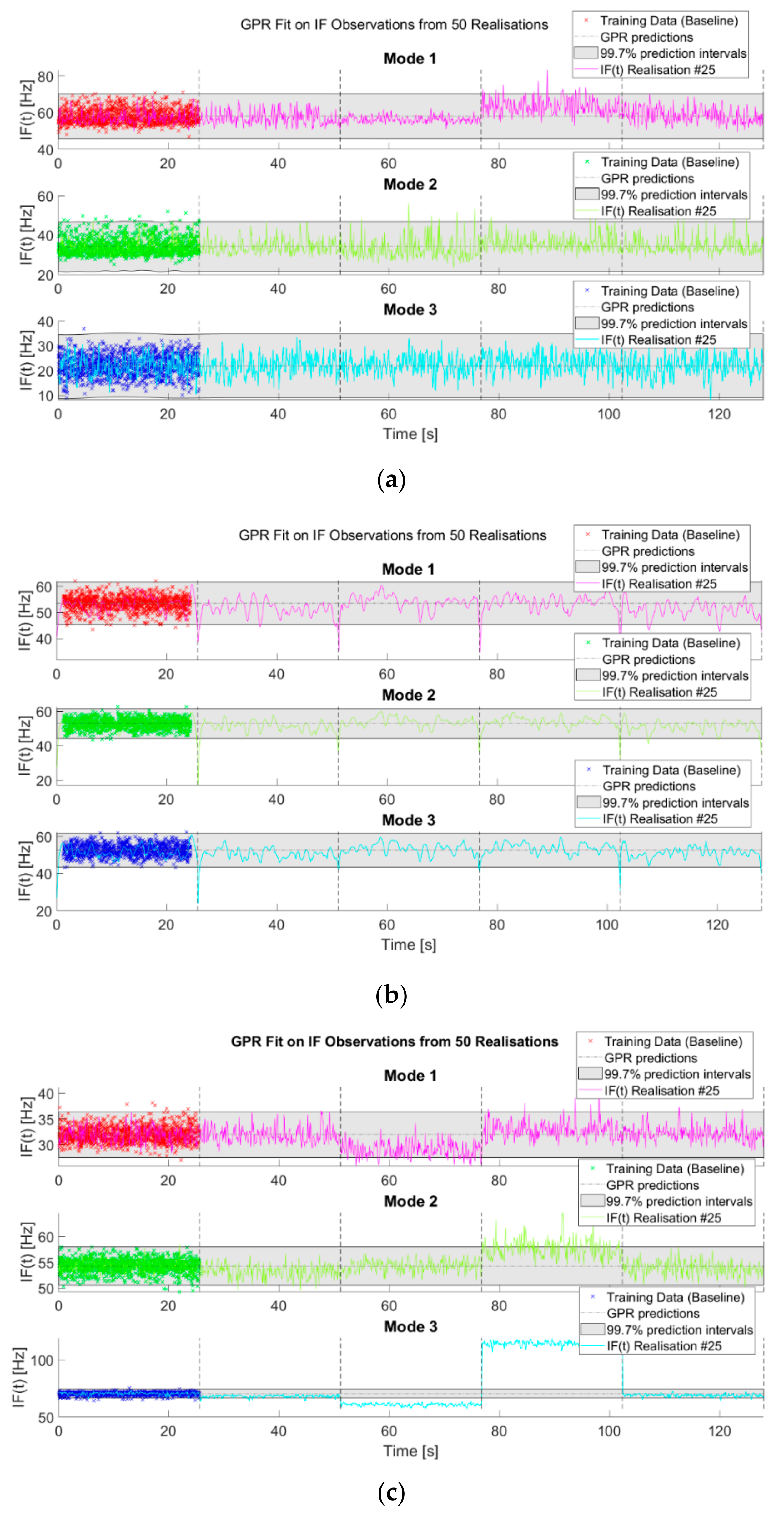
4.7. Sensitivity of the Extracted IMFs to Damage
4.8. Uses for ML-Based SHM
5. Discussion and Conclusions
- Regarding the choice between the data-driven or manual selection of the number of modes to be extracted, for structural engineering purposes, the second option should be preferred. The number of relevant vibrational modes of a target structure can be easily estimated or guessed; on the other hand, having a fixed number of modes greatly simplifies the comparison between different measurements. This also makes the detection of (most likely damage-related) anomalies easier and more reliable.
- When comparing the IMFs extracted from different recordings, it is necessary to check their comparability to avoid blunders.
- Filtering the acceleration THs of the structure under random excitations did not improve significantly any of the tested algorithms, or at least not for the specific case investigated here.
- The CEEMDAN algorithm can be used to isolate the most important characteristics of the target signal, yet it is greatly affected by measurement noise and nonlinear distortions.
- The HVD is better suited for time-domain applications rather than frequency-domain ones. It has a remarkable role for nonlinear SDoF systems where it can efficiently isolate distinct (linear or nonlinear) terms for forced or free vibrations. It is also well suited for the analysis of nonstationary responses to external impulses and the extraction of energy-related damage sensitive features. However, it is less apt for systems with multiple degrees of freedom and/or to track damage-related frequency shifts.
- The VMD approach performed overall better than the CEEMDAN and HVD techniques for tracking frequency shifts.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| EMD, EEMD, or CEEMDAN | Advantages | Relatively simple to apply and implement. Time-tested approach (applied extensively for more than 20 years). Fully data-driven: it does not require any prior knowledge of the structure under examination [68]. It automatically defines the optimal number of modes depending on the properties of the signal. On the other hand, different signals may return a different number of modes, making direct comparison difficult or unreliable [68]. It can operate with any data length [10] (except for computational issues). Thanks to its adaptivity, it has been demonstrated as an efficient tool for signal denoising in the case of both homoscedastic or heteroscedastic noise [69]. The damage effects can be limited and/or better appreciated in a subset of modes or even in a single IMF (which can be automatically selected accordingly to a feature of interest; see e.g., Ref. [70]). Several different stopping criteria exists in the scientific literature for the sifting process (e.g., a Standard Deviation threshold [7], the S-number [71], the Threshold Method [72], or the Energy Difference Tracking [73] criterion). It can be seen as a dyadic filter bank, similarly to the Discrete Wavelet Decomposition [74]. The extracted modes are hierarchically ordered: the first IMF contains the highest-frequency component, while, at any step, information of lower-frequency components is left into the residual signal [10]. This latter point can be also exploited to estimate the Hurst exponent [74] of the investigated time series. |
| Disadvantages | The EMD suffers from mode-mixing; this issue is only partially solved by the EEMD and CEEMDAN implementations. The CEEMDAN algorithm remains very sensitive to additive noise [47]. The modes may have a wide frequency band (thus not being a monocomponent term as expected). This is especially true for the first IMF [75]. Real-life signals are sampled, i.e., the continuous-time signal is reduced to a discrete-time reduction of the same during the measurement. A maximum/minimum of the original continuous signal may fall between two sampled points and therefore not be observed or correctly identified. This can undermine the correct identification of the extrema and therefore of their upper and lower envelopes [68]. The quality of the upper and lower envelopes depends on the choice of
For datasets of length , the order of time complexity of the classic EMD is ; i.e., it is equivalent to the traditional Fourier transform (but with a larger factor) [77]. This makes it less computationally efficient than other techniques such as ITD [78] and not applicable as it is for real-time, online monitoring [79]. The IMF components of the signal may have poor orthogonality; this limits their usefulness as a basis of the dynamic system [80]. The global, recursive sifting procedure does not allow for backward error correction [12]. It struggles to separate wide-band modes with overlapping spectra [81] and close modes [82] (generally, at least one octave of distance in the frequency domain is needed [47]). Some low-energy components may be inseparable [54,83]. Close modes can be difficult to isolate as well [54,83]. Some fictitious (computational) low-amplitude components may appear at low frequencies [82]. These have been reported to “spoil” [83] the time-frequency map, making the interpretation by a human user more difficult. Some parameters, such as the maximum number of sifting iterations allowed, the number of WGN realisations, and the standard deviation of the applied noise, are still selected manually and may affect the results. The pseudo-randomly generated WGN realisations strongly affect the results, the computational time, and effort required. This can cause instability issue at the software level as well. The procedure suffers from the end effects, overshoots, or undershoots typical of the HT [54]. |
| HVD | Advantages | Based on a single and simple signal processing technique (the Hilbert transform), with a clear analytical formulation and backed by solid physical principles. On the other hand, the HT is affected by all the issues explained in Section 2.1.1. Fully data-driven. It returns an envelope-based hierarchy of modes (the first mode has the highest varying amplitude, the following ones are ordered for decreasing amplitude), rather than frequency-based [54] (depending on the intended use, this can be both an advantage or a downside). The resulting IMFs are analytically defined with specific characteristics. It shows better frequency resolution in comparison to EMD, with greater capabilities to decompose closer frequencies (this aspect is deeply investigated in Ref. [47]). Nevertheless, it is still unable to detect very close modes (i.e., if the difference between the two natural frequencies is less than [10]). In at least one study [84], it has been proved to be more computationally efficient than an EMD-based option for detrending and baseline wander removal. Due to its significantly lower computational cost, the HVD has been deemed as “more appealing” [85] than EMD for real-time applications, such as for online monitoring. The number K of modes to be extracted is selected arbitrarily and can be varied as desired. On the other hand, there is no guarantee that the user’s assumption corresponds to the real number of independent components. In this regard, Feldman [10] suggests using a limit value of the standard deviation difference, computed from the two consecutive iteration results, as a stopping criterion for the sifting process. The data-driven automatic setting of is still considered to be beyond the current capabilities [47]. |
| Disadvantages | It has been proved to be as sensitive to additive noise as the EMD algorithm [47]. Being physically based, the method needs some theoretical requirements [10]:
For these reasons, the algorithm is not applicable for analysing intermittent or non-oscillating signals [54]. Due to the above prescriptions, the approach cannot extract aperiodic components of the signal [10]. Requires relatively long recordings, while the EMD can operate with shorter acquisitions [10,86]. Depending on the aim, an amplitude-based hierarchy may be preferable to a frequency-based one. However, since the shift in the natural frequencies is one of the main damage-sensitive features, the other way around is generally better suited for SHM. Less accurate than EMD for the abrupt envelope and/or frequency instantaneous variations such as frequency jumps and crossings [47,86]. The cut-off frequency , while being the only required parameter, is critical for the results and cannot be easily defined with absolute certainty. For technical reasons, the sampling frequency is strongly suggested to be in the range , with being the fundamental frequency of the signal [41]. |
| VMD | Advantages | Has a solid theoretical background and analytical formulation. Fully data-driven. The method is non-recursive, and the decomposed modes are extracted concurrently rather than iteratively (differently from EMD and HVD) [12,50]. This allows for error balancing between them through a joint-optimisation scheme. Does not require specific improvements to deal with measurement noise. The similarities of the mode updating procedure with the Wiener filter suggests that the approach has some optimality in dealing with measurement noise [12]. The VMD has been proved to be not only robust to noise but also sensitive in detecting weak side-band DSFs that are often masked by the background noise [83]. The extracted sub-signals have their own centre frequency and, for a sufficiently long time interval, can be considered as pure harmonics [12]. The resulting IMFs are bandwidth-limited, differently from the ones obtained from EMD. This narrow-band IMFs allows a proper single-mode decomposition [12], similarly to the HVD method [10]. The VMD has been proved to be well-suited for signal denoising and detrended fluctuation analysis, with an order of time complexity comparable to that of EMD [87]. It has been recently proposed in implementations for real-time pattern recognition, proving a major efficiency in comparison with EMD and wavelet-based approaches [88]. Does not require to predefine the filter bank boundaries [12]. The VMD has been shown to outperform EMD for intra-wave signal analysis [83]. The equivalent filter bank of the VMD has a Wavelet Packet (WP)-like structure, whereas the EMD has a more Wavelet-like equivalent filter bank. The former one results in more subdivisions in the time-frequency space, allowing (at least theoretically) to extract more features with higher resolution [51], allowing also to distinguish close modes [80]. As for the HVD, the number K of modes to be extracted is defined manually, which allows some flexibility but at the cost of adding more arbitrariness to the process. |
| Disadvantages | As for the HVD, the assumptions on the definition of the modes do not allow extracting non-periodic components. Differently from EMD, HVD, and other approaches such as the Discrete Wavelet Transform, it does not automatically return a hierarchy of modes (neither amplitude nor frequency ordered), even if this can be achieved easily in post-processing. Not appliable to non- discontinuous signals (e.g., sawtooth signals) [12]. Arguably, the instantaneous frequency of such signals is not physically very meaningful; yet it can still be useful for the analysis of signals from systems with abrupt structural changes (potentially even damage-induced). Struggles to decompose wide-band modes with overlapping spectra [80]. The method requires some user-defined parameters (α, τ, ), which may affect the results. These are more than e.g., for HVD, which only requires to define the cut-off frequency. |
References
- Farrar, C.R.; Worden, K. Structural Health Monitoring: A Machine Learning Perspective; John Wiley & Sons: Toronto, ON, Canada, 2013. [Google Scholar]
- Salawu, O. Detection of structural damage through changes in frequency: A review. Eng. Struct. 1997, 19, 718–723. [Google Scholar] [CrossRef]
- Bhowmik, B.; Tripura, T.; Hazra, B.; Pakrashi, V. First-Order Eigen-Perturbation Techniques for Real-Time Damage Detection of Vibrating Systems: Theory and Applications. Appl. Mech. Rev. 2019, 71. [Google Scholar] [CrossRef]
- Bhowmik, B.; Krishnan, M.; Hazra, B.; Pakrashi, V. Real-time unified single- and multi-channel structural damage detection using recursive singular spectrum analysis. Struct. Health Monit. 2018, 18, 563–589. [Google Scholar] [CrossRef]
- Iakovidis, I.; Cross, E.J.; Worden, K. A principled multiresolution approach for signal decomposition. J. Phys. Conf. Ser. 2018, 1106, 012001. [Google Scholar] [CrossRef] [Green Version]
- Feng, Z.; Zhang, N.; Zuo, M.J. Adaptive Mode Decomposition Methods and Their Applications in Signal Analysis for Machinery Fault Diagnosis: A Review with Examples. IEEE Access 2017, 5, 24301–24331. [Google Scholar] [CrossRef]
- Huang, N.E.; Shen, Z.; Long, S.R.; Wu, M.C.; Shih, H.H.; Zheng, Q.; Yen, N.C.; Tung, C.C.; Liu, H.H. The empirical mode decomposition and the Hilbert spectrum for nonlinear and non-stationary time series analysis. Proc. R. Soc. A Math. Phys. Eng. Sci. 1998, 454, 903–995. [Google Scholar] [CrossRef]
- Smith, J.S. The local mean decomposition and its application to EEG perception data. J. R. Soc. Interface 2005, 2, 443–454. [Google Scholar] [CrossRef] [PubMed]
- Zheng, J.; Cheng, J.; Yang, Y. A rolling bearing fault diagnosis approach based on LCD and fuzzy entropy. Mech. Mach. Theory 2013, 70, 441–453. [Google Scholar] [CrossRef]
- Feldman, M. Time-varying vibration decomposition and analysis based on the Hilbert transform. J. Sound Vib. 2006, 295, 518–530. [Google Scholar] [CrossRef]
- Gilles, J. Empirical Wavelet Transform. IEEE Trans. Signal Process. 2013, 61, 3999–4010. [Google Scholar] [CrossRef]
- Dragomiretskiy, K.; Zosso, D. Variational Mode Decomposition. IEEE Trans. Signal Process. 2014, 62, 531–544. [Google Scholar] [CrossRef]
- Frei, M.G.; Osorio, I. Intrinsic time-scale decomposition: Time–frequency–energy analysis and real-time filtering of non-stationary signals. Proc. R. Soc. A Math. Phys. Eng. Sci. 2006, 463, 321–342. [Google Scholar] [CrossRef]
- Barbosh, M.; Singh, P.; Sadhu, A. Empirical mode decomposition and its variants: A review with applications in structural health monitoring. Smart Mater. Struct. 2020, 29, 3001. [Google Scholar] [CrossRef]
- Isham, M.F.; Leong, M.S.; Lim, M.H.; Zakaria, M.K. A Review on Variational Mode Decomposition for Rotating Machinery Diagnosis; EDP Sciences: Les Ulis, France, 2019; Volume 255. [Google Scholar] [CrossRef]
- Figueiredo, E.; Park, G.; Farrar, C.R.; Worden, K.; Figueiras, J. Machine learning algorithms for damage detection under operational and environmental variability. Struct. Health Monit. 2010, 10, 559–572. [Google Scholar] [CrossRef]
- Rilling, G.; Flandrin, P.; Goncalves, P.; Lilly, J.M. Bivariate Empirical Mode Decomposition. IEEE Signal Process. Lett. 2007, 14, 936–939. [Google Scholar] [CrossRef] [Green Version]
- Rehman, N.; Mandic, D.P. Multivariate empirical mode decomposition. Proc. R. Soc. A Math. Phys. Eng. Sci. 2009, 466, 1291–1302. [Google Scholar] [CrossRef]
- McNeill, S. Decomposing a signal into short-time narrow-banded modes. J. Sound Vib. 2016, 373, 325–339. [Google Scholar] [CrossRef]
- Yang, J.N.; Lei, Y.; Pan, S.; Huang, N. System identification of linear structures based on Hilbert-Huang spectral analysis. Part 1: Normal modes. Earthq. Eng. Struct. Dyn. 2003, 32, 1443–1467. [Google Scholar] [CrossRef]
- Shi, Z.Y.; Law, S.S. Identification of Linear Time-Varying Dynamical Systems Using Hilbert Transform and Empirical Mode Decomposition Method. J. Appl. Mech. 2006, 74, 223–230. [Google Scholar] [CrossRef]
- Yu, D.J.; Ren, W.X. EMD-based stochastic subspace identification of structures from operational vibration measurements. Eng. Struct. 2005, 27, 1741–1751. [Google Scholar] [CrossRef]
- Chen, J.; Xu, Y.; Zhang, R. Modal parameter identification of Tsing Ma suspension bridge under Typhoon Victor: EMD-HT method. J. Wind. Eng. Ind. Aerodyn. 2004, 92, 805–827. [Google Scholar] [CrossRef]
- Chen, J. Application of Empirical Mode Decomposition in Structural Health Monitoring: Some Experience. Adv. Adapt. Data Anal. 2009, 1, 601–621. [Google Scholar] [CrossRef]
- Lei, Y.; Lin, J.; He, Z.; Zuo, M.J. A review on empirical mode decomposition in fault diagnosis of rotating machinery. Mech. Syst. Signal Process. 2013, 35, 108–126. [Google Scholar] [CrossRef]
- Liu, J.; Wang, X.; Yuan, S.; Li, G. On Hilbert-Huang Transform Approach for Structural Health Monitoring. J. Intell. Mater. Syst. Struct. 2006, 17, 721–728. [Google Scholar] [CrossRef]
- Huang, E.N.; Shen, S.S.P. Hilbert-Huang Transform and Its Applications; World Scientific Pub Co Pte Lt: Chennai, India, 2005; Volume 16. [Google Scholar]
- Kizhner, S.; Flatley, T.; Huang, N.E.; Blank, K.; Conwell, E. On the Hilbert-Huang transform data processing system development. In Proceedings of the 2004 IEEE Aerospace Conference Proceedings (IEEE Cat. No.04TH8720), Big Sky, MT, USA, 6–13 March 2004; pp. 1961–1978. [Google Scholar] [CrossRef] [Green Version]
- Wu, Z.; Huang, N.E.; Shen, S.S.P. Statistical Significance Test of Intrinsic Mode Functions. Hilbert–Huang Transform Appl. 2014, 149–169. [Google Scholar] [CrossRef] [Green Version]
- Colominas, M.A.; Schlotthauer, G.; Torres, M.E. Improved complete ensemble EMD: A suitable tool for biomedical signal processing. Biomed. Signal Process. Control 2014, 14, 19–29. [Google Scholar] [CrossRef]
- Wu, Z.; Huang, N.E. Ensemble Empirical Mode Decomposition: A Noise-Assisted Data Analysis Method. Adv. Adapt. Data Anal. 2009, 1, 1–41. [Google Scholar] [CrossRef]
- Torres, M.E.; Colominas, M.A.; Schlotthauer, G.; Flandrin, P. A complete ensemble empirical mode decomposition with adaptive noise. In Proceedings of the 2011 IEEE International Conference on Acoustics, Speech and Signal Processing (ICASSP), Prague, Czech Republic, 22–27 May 2011; pp. 4144–4147. [Google Scholar] [CrossRef]
- Feldman, M. Hilbert transform in vibration analysis. Mech. Syst. Signal Process. 2011, 25, 735–802. [Google Scholar] [CrossRef]
- Huang, N.E.; Wu, Z.; Long, S.R.; Arnold, K.C.; Chen, X.; Blank, K. On Instantaneous Frequency. Adv. Adapt. Data Anal. 2009, 1, 177–229. [Google Scholar] [CrossRef]
- Londoño, J.M.; Neild, S.A.; Cooper, J.E. Identification of backbone curves of nonlinear systems from resonance decay responses. J. Sound Vib. 2015, 348, 224–238. [Google Scholar] [CrossRef] [Green Version]
- Neild, S.; McFadden, P.; Williams, M. A review of time-frequency methods for structural vibration analysis. Eng. Struct. 2003, 25, 713–728. [Google Scholar] [CrossRef]
- Civera, M.; Fragonara, L.Z.; Surace, C. Using Video Processing for the Full-Field Identification of Backbone Curves in Case of Large Vibrations. Sensors 2019, 19, 2345. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Maragos, P.; Kaiser, J.; Quatieri, T. On amplitude and frequency demodulation using energy operators. IEEE Trans. Signal Process. 1993, 41, 1532–1550. [Google Scholar] [CrossRef]
- Junsheng, C.; Dejie, Y.; Yü, Y. The application of energy operator demodulation approach based on EMD in machinery fault diagnosis. Mech. Syst. Signal Process. 2007, 21, 668–677. [Google Scholar] [CrossRef]
- Zheng, J.; Pan, H.; Yang, S.; Cheng, J. Adaptive parameterless empirical wavelet transform based time-frequency analysis method and its application to rotor rubbing fault diagnosis. Signal Process. 2017, 130, 305–314. [Google Scholar] [CrossRef]
- Feldman, M. Hilbert Transform Applications in Mechanical Vibration; John Wiley & Sons: Toronto, ON, Canada, 2011. [Google Scholar]
- Feldman, M. Hilbert Transform, Envelope, Instantaneous Phase, and Frequency. Encycl. Struct. Health Monit. 2008. [Google Scholar] [CrossRef]
- Feldman, M. Considering high harmonics for identification of non-linear systems by Hilbert transform. Mech. Syst. Signal Process. 2007, 21, 943–958. [Google Scholar] [CrossRef]
- Feldman, M. Identification of weakly nonlinearities in multiple coupled oscillators. J. Sound Vib. 2007, 303, 357–370. [Google Scholar] [CrossRef]
- Noël, J.; Kerschen, G. Nonlinear system identification in structural dynamics: 10 more years of progress. Mech. Syst. Signal Process. 2017, 83, 2–35. [Google Scholar] [CrossRef]
- Boashash, B. Estimating and interpreting the instantaneous frequency of a signal. I. Fundamentals. Proc. IEEE 1992, 80, 520–538. [Google Scholar] [CrossRef]
- Braun, S.; Feldman, M. Decomposition of non-stationary signals into varying time scales: Some aspects of the EMD and HVD methods. Mech. Syst. Signal Process. 2011, 25, 2608–2630. [Google Scholar] [CrossRef]
- Civera, M.; Fragonara, L.Z.; Surace, C. An experimental study of the feasibility of phase-based video magnification for damage detection and localisation in operational deflection shapes. Strain 2020, 56, 2336. [Google Scholar] [CrossRef]
- Ni, P.; Li, J.; Hao, H.; Xia, Y.; Wang, X.; Lee, J.M.; Jung, K.H. Time-varying system identification using variational mode decomposition. Struct. Control Health Monit. 2018, 25, 2175. [Google Scholar] [CrossRef]
- Bagheri, A.; Ozbulut, O.E.; Harris, D.K. Structural system identification based on variational mode decomposition. J. Sound Vib. 2018, 417, 182–197. [Google Scholar] [CrossRef]
- Wang, Y.; Markert, R.; Xiang, J.; Zheng, W. Research on variational mode decomposition and its application in detecting rub-impact fault of the rotor system. Mech. Syst. Signal Process. 2015, 60, 243–251. [Google Scholar] [CrossRef]
- Carson, J. Notes on the Theory of Modulation. Proc. IRE 1922, 10, 57–64. [Google Scholar] [CrossRef] [Green Version]
- Liu, W.; Cao, S.; Chen, Y. Applications of variational mode decomposition in seismic time-frequency analysis. Geophysics 2016, 81, V365–V378. [Google Scholar] [CrossRef]
- Huang, Y.; Yan, C.J.; Xu, Q. On the difference between empirical mode decomposition and Hilbert vibration decomposition for earthquake motion records. In Proceedings of the 15th World Conference on Earthquake Engineering, Lisbon, Portugal, 24–28 September 2012. [Google Scholar]
- Aneesh, C.; Kumar, S.; Hisham, P.; Soman, K. Performance Comparison of Variational Mode Decomposition over Empirical Wavelet Transform for the Classification of Power Quality Disturbances Using Support Vector Machine. Procedia Comput. Sci. 2015, 46, 372–380. [Google Scholar] [CrossRef] [Green Version]
- Pontillo, A.; Hayes, D.; Dussart, G.X.; Matos, G.E.L.; Carrizales, M.A.; Yusuf, S.Y.; Lone, M.M. Flexible High Aspect Ratio Wing: Low Cost Experimental Model and Computational Framework. In Proceedings of the 2018 AIAA Atmospheric Flight Mechanics Conference, American Institute of Aeronautics and Astronautics, Atlanta, GA, USA, 25–29 June 2018. [Google Scholar]
- Civera, M.; Fragonara, L.Z.; Surace, C. A Computer Vision-Based Approach for Non-Contact Modal Analysis and Finite Element Model Updating; Springer International Publishing: New York, NY, USA, 2021; pp. 481–493. [Google Scholar]
- Civera, M.; Ferraris, M.; Ceravolo, R.; Surace, C.; Betti, R. The Teager-Kaiser Energy Cepstral Coefficients as an Effective Structural Health Monitoring Tool. Appl. Sci. 2019, 9, 5064. [Google Scholar] [CrossRef] [Green Version]
- Figueiredo, E.; Park, G.; Figueiras, J.; Farrar, C.; Worden, K. Structural Health Monitoring Algorithm Comparisons Using Standard Data Sets; Office of Scientific and Technical Information (OSTI): Oak Ridge, TN, USA, 2009.
- Pugno, N.; Surace, C.; Ruotolo, R. Evaluation of the Non-Linear Dynamic Response to Harmonic Excitation of a Beam with Several Breathing Cracks. J. Sound Vib. 2000, 235, 749–762. [Google Scholar] [CrossRef] [Green Version]
- Panda, S.; Tripura, T.; Hazra, B. First-Order Error-Adapted Eigen Perturbation for Real-Time Modal Identification of Vibrating Structures. J. Vib. Acoust. 2021, 143, 1–25. [Google Scholar] [CrossRef]
- Kay, S.M. Modern Spectral Estimation: Theory and Application; Pearson Education: London, UK, 1988. [Google Scholar]
- Klionskiy, D.M.; Kaplun, D.I.; Geppener, V.V. Empirical Mode Decomposition for Signal Preprocessing and Classification of Intrinsic Mode Functions. Pattern Recognit. Image Anal. 2018, 28, 122–132. [Google Scholar] [CrossRef]
- Rasmussen, C.E. Gaussian Processes in Machine Learning. In Summer School on Machine Learning; Springer: Cham, Switzerland, 2004; pp. 63–71. [Google Scholar] [CrossRef] [Green Version]
- Civera, M.; Surace, C.; Worden, K. Detection of Cracks in Beams Using Treed Gaussian Processes. In Proceedings of the Conference of Society for Experimental Mechanics Series; Springer International Publishing, Garden Grove, CA, USA, 30 January–2 February 2017; Volume 19, pp. 85–97. [Google Scholar]
- Martucci, D.; Civera, M.; Surace, C.; Worden, K. Novelty Detection in a Cantilever Beam using Extreme Function Theory. J. Phys. Conf. Ser. 2018, 1106, 2027. [Google Scholar] [CrossRef] [Green Version]
- Civera, M.; Boscato, G.; Fragonara, L.Z. Treed gaussian process for manufacturing imperfection identification of pultruded GFRP thin-walled profile. Compos. Struct. 2020, 254, 2882. [Google Scholar] [CrossRef]
- Rato, R.; Ortigueira, M.; Batista, A. On the HHT, its problems, and some solutions. Mech. Syst. Signal Process. 2008, 22, 1374–1394. [Google Scholar] [CrossRef] [Green Version]
- Klionskiy, D.; Kupriyanov, M.; Kaplun, D. Mikhail Signal denoising based on empirical mode decomposition. J. Vibroeng. 2017, 19, 5560–5570. [Google Scholar] [CrossRef]
- Ricci, R.; Pennacchi, P. Diagnostics of gear faults based on EMD and automatic selection of intrinsic mode functions. Mech. Syst. Signal Process. 2011, 25, 821–838. [Google Scholar] [CrossRef] [Green Version]
- Huang, N.E.; Shen, Z.; Long, S.R. A New View of Nonlinear Water Waves: The Hilbert Spectrum. Annu. Rev. Fluid Mech. 1999, 31, 417–457. [Google Scholar] [CrossRef] [Green Version]
- Rilling, G.; Flandrin, P.; Gonçalves, P. On Empirical Mode Decomposition and Its Algorithms. 2003. Available online: https://hal.inria.fr/inria-00570628 (accessed on 14 September 2020).
- Junsheng, C.; Dejie, Y.; Yu, Y. Research on the intrinsic mode function (IMF) criterion in EMD method. Mech. Syst. Signal Process. 2006, 20, 817–824. [Google Scholar] [CrossRef]
- Flandrin, P.; Rilling, G.; Goncalves, P. Empirical Mode Decomposition as a Filter Bank. IEEE Signal Process. Lett. 2004, 11, 112–114. [Google Scholar] [CrossRef] [Green Version]
- Dätig, M.; Schlurmann, T. Performance and limitations of the Hilbert–Huang transformation (HHT) with an application to irregular water waves. Ocean Eng. 2004, 31, 1783–1834. [Google Scholar] [CrossRef]
- Rilling, G.; Flandrin, P. One or Two Frequencies? The Empirical Mode Decomposition Answers. IEEE Trans. Signal Process. 2008, 56, 85–95. [Google Scholar] [CrossRef] [Green Version]
- Wang, Y.H.; Yeh, C.H.; Young, H.W.V.; Hu, K.; Lo, M.T. On the computational complexity of the empirical mode decomposition algorithm. Phys. A Stat. Mech. Appl. 2014, 400, 159–167. [Google Scholar] [CrossRef]
- Voznesenskiy, A.; Kaplun, D. Adaptive Signal Processing Algorithms Based on EMD and ITD. IEEE Access 2019, 7, 171313–171321. [Google Scholar] [CrossRef]
- Fontugne, R.; Borgnat, P.; Flandrin, P. Online Empirical Mode Decomposition. In Proceedings of the 2017 IEEE International Conference on Acoustics, Speech and Signal Processing (ICASSP), New Orleans, LA, USA, 5–9 March 2017; pp. 4306–4310. [Google Scholar]
- Qiang, Z.G.; Wei, M.Z.; Quan, X.G.; Jie, W.D. On the difference between empirical mode decomposition and wavelet decomposition in the nonlinear time series. Acta Phys. Sin. 2005, 54, 3947–3957. [Google Scholar] [CrossRef]
- Chen, S.; Dong, X.; Peng, Z.; Zhang, W.; Meng, G. Nonlinear Chirp Mode Decomposition: A Variational Method. IEEE Trans. Signal Process. 2017, 65, 6024–6037. [Google Scholar] [CrossRef]
- Peng, Z.; Tse, P.W.; Chu, F. A comparison study of improved Hilbert–Huang transform and wavelet transform: Application to fault diagnosis for rolling bearing. Mech. Syst. Signal Process. 2005, 19, 974–988. [Google Scholar] [CrossRef]
- Yang, W.; Peng, Z.; Wei, K.; Shi, P.; Tian, W. Superiorities of variational mode decomposition over empirical mode decomposition particularly in time–frequency feature extraction and wind turbine condition monitoring. IET Renew. Power Gener. 2017, 11, 443–452. [Google Scholar] [CrossRef] [Green Version]
- Sharma, H.; Sharma, K. Baseline wander removal of ECG signals using Hilbert vibration decomposition. Electron. Lett. 2015, 51, 447–449. [Google Scholar] [CrossRef]
- Mutlu, A.Y. Detection of epileptic dysfunctions in EEG signals using Hilbert vibration decomposition. Biomed. Signal Process. Control 2018, 40, 33–40. [Google Scholar] [CrossRef]
- Feldman, M. Theoretical analysis and comparison of the Hilbert transform decomposition methods. Mech. Syst. Signal Process. 2008, 22, 509–519. [Google Scholar] [CrossRef]
- Liu, Y.; Yang, G.; Li, M.; Yin, H. Variational mode decomposition denoising combined the detrended fluctuation analysis. Signal Process. 2016, 125, 349–364. [Google Scholar] [CrossRef]
- Sahani, M.; Dash, P.; Samal, D. A real-time power quality events recognition using variational mode decomposition and online-sequential extreme learning machine. Measurement 2020, 157, 107597. [Google Scholar] [CrossRef]














| Feature | EMD | HVD | VMD |
|---|---|---|---|
| Basis | Self-Adaptation | Self-Adaptation | Prior Determination |
| Frequency | Difference, Local | Difference, Global | Difference, Global |
| Characterisation domain | Energy-Time | Energy-Time-Frequency | Energy-Time-Frequency |
| Apt for nonlinear systems? | Yes | Yes | Yes |
| Apt for nonstationary signals? | Yes | Yes | No |
| Feature extraction | Yes | Yes | Yes |
| Theoretical foundations | Empirical | Complete Theory | Complete Theory |
| Property | Value | Measurement Unit |
|---|---|---|
| Free length (clamp to tip) | 706.00 | mm |
| Thickness | 2.00 | mm |
| Max width at the Clamped section | 180.00 | mm |
| Min width at the tip section | 17.04 | mm |
| Young’s modulus | MPa | |
| Density | 2893.07 | |
| Damping ratio | 0.86 | % |
| Poisson’s ratio | 0.26 | - |
| Case | Description |
|---|---|
| 1 | Undamaged baseline |
| 2 | Undamaged with confounding influences; added mass of 1.2 kg at the base |
| 3 | Undamaged with confounding influences; added mass of 1.2 kg at the 1st floor |
| 4 | Linear damage; 87.5% stiffness reduction in one column of the 1st inter-storey |
| 5 | Linear damage; 87.5% stiffness reduction in two columns of the 1st inter-storey |
| 6 | Linear damage; 87.5% stiffness reduction in one column of the 2nd inter-storey |
| 7 | Linear damage; 87.5% stiffness reduction in two columns of the 2nd inter-storey |
| 8 | Linear damage; 87.5% stiffness reduction in one column of the 3rd inter-storey |
| 9 | Linear damage; 87.5% stiffness reduction in two columns of the 3rd inter-storey |
| 10 | Nonlinear damage; distance between bumper and column tip 0.20 mm |
| 11 | Nonlinear damage; distance between bumper and column tip 0.15 mm |
| 12 | Nonlinear damage; distance between bumper and column tip 0.13 mm |
| 13 | Nonlinear damage; distance between bumper and column tip 0.10 mm |
| 14 | Nonlinear damage; distance between bumper and column tip 0.05 mm |
| 15 | Nonlinear damage with confounding influences; Bumper 0.20 mm from column tip, 1.2 kg added at the base |
| 16 | Nonlinear damage with confounding influences; Bumper 0.20 mm from column tip, 1.2 kg added on the 1st floor |
| 17 | Nonlinear damage with confounding influences; Damaged bumper 0.10 mm from column tip, 1.2 kg added on the 1st floor |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Civera, M.; Surace, C. A Comparative Analysis of Signal Decomposition Techniques for Structural Health Monitoring on an Experimental Benchmark. Sensors 2021, 21, 1825. https://doi.org/10.3390/s21051825
Civera M, Surace C. A Comparative Analysis of Signal Decomposition Techniques for Structural Health Monitoring on an Experimental Benchmark. Sensors. 2021; 21(5):1825. https://doi.org/10.3390/s21051825
Chicago/Turabian StyleCivera, Marco, and Cecilia Surace. 2021. "A Comparative Analysis of Signal Decomposition Techniques for Structural Health Monitoring on an Experimental Benchmark" Sensors 21, no. 5: 1825. https://doi.org/10.3390/s21051825
APA StyleCivera, M., & Surace, C. (2021). A Comparative Analysis of Signal Decomposition Techniques for Structural Health Monitoring on an Experimental Benchmark. Sensors, 21(5), 1825. https://doi.org/10.3390/s21051825