Friction Compensation Control of Electromechanical Actuator Based on Neural Network Adaptive Sliding Mode



Abstract
:1. Introduction
2. Materials and Methods
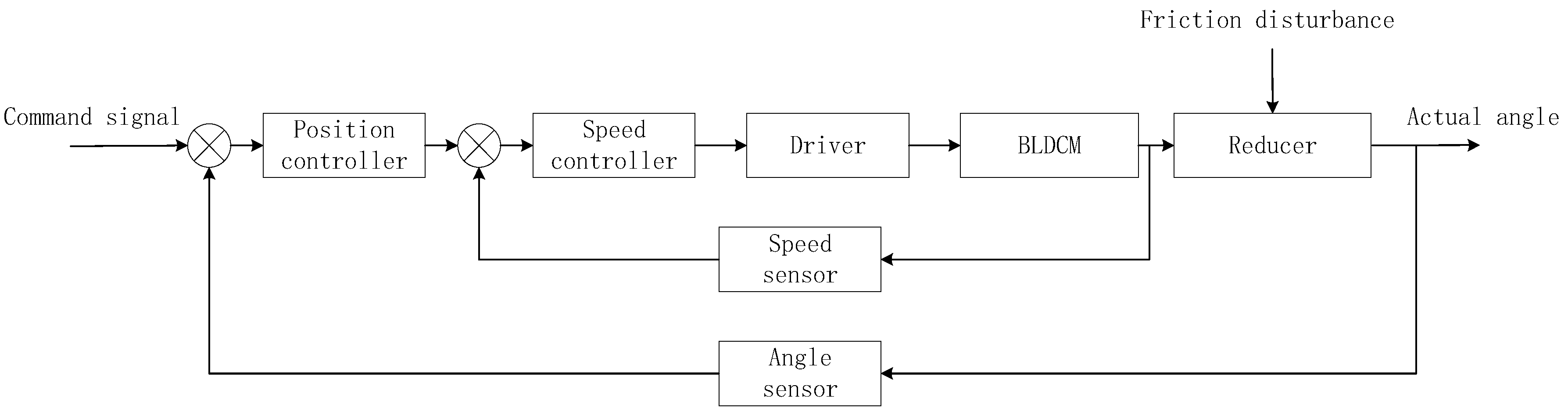
2.1. System Composition and Working Principle
2.2. EMA System Modeling
2.2.1. BLDC Motor Modeling
2.2.2. Drive and Reducer Modeling
2.2.3. Stribeck Friction Model
2.3. Controller Design
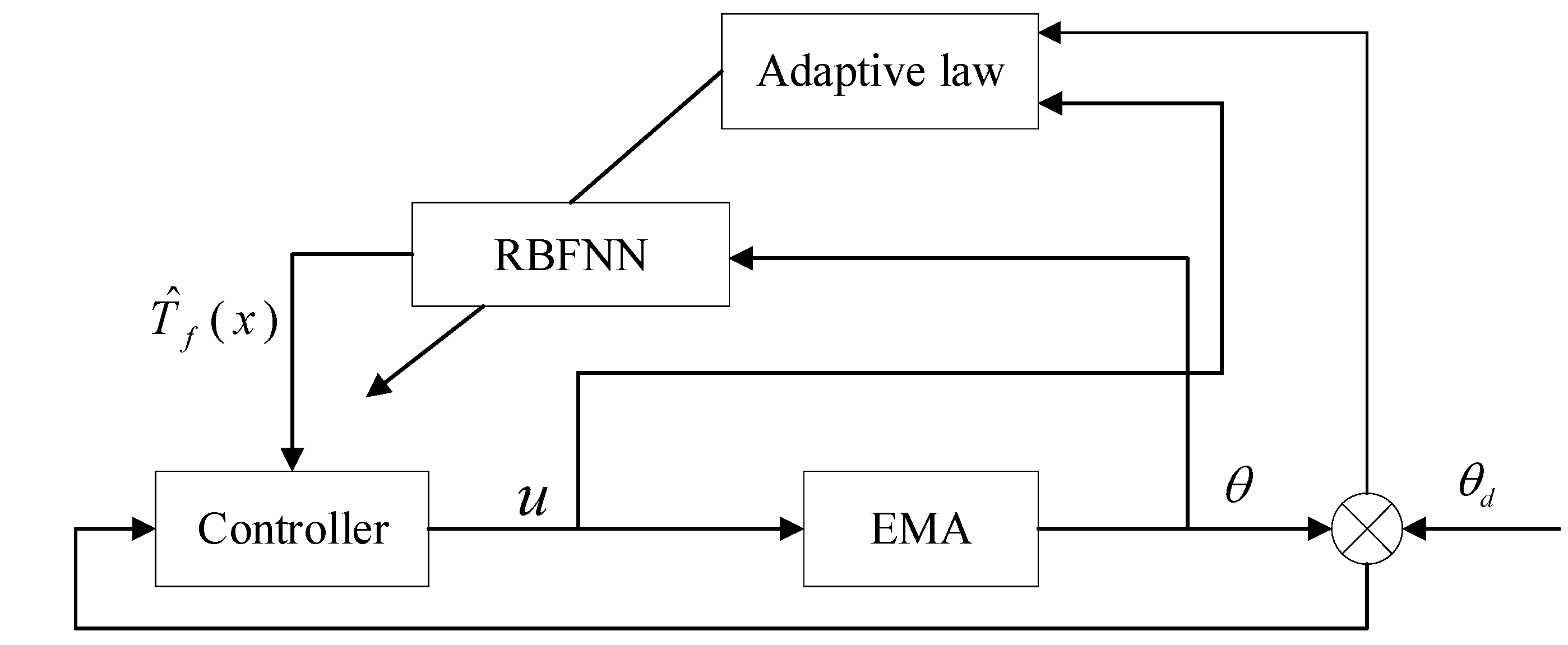
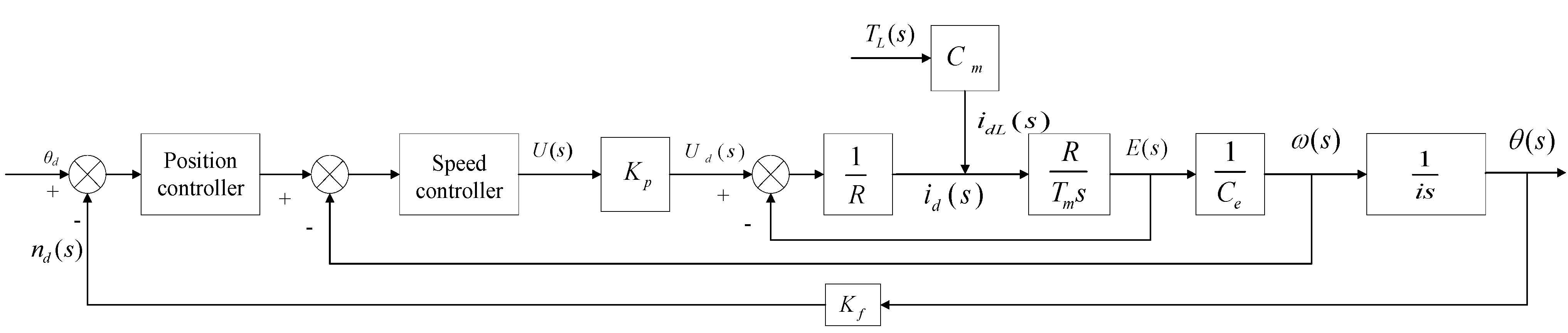
2.3.1. Controller Structure
2.3.2. Controller Design
2.3.3. Proof of Controller Stability
3. Simulation Results and Analysis
3.1. Parameter Settings
3.2. Simulation Results
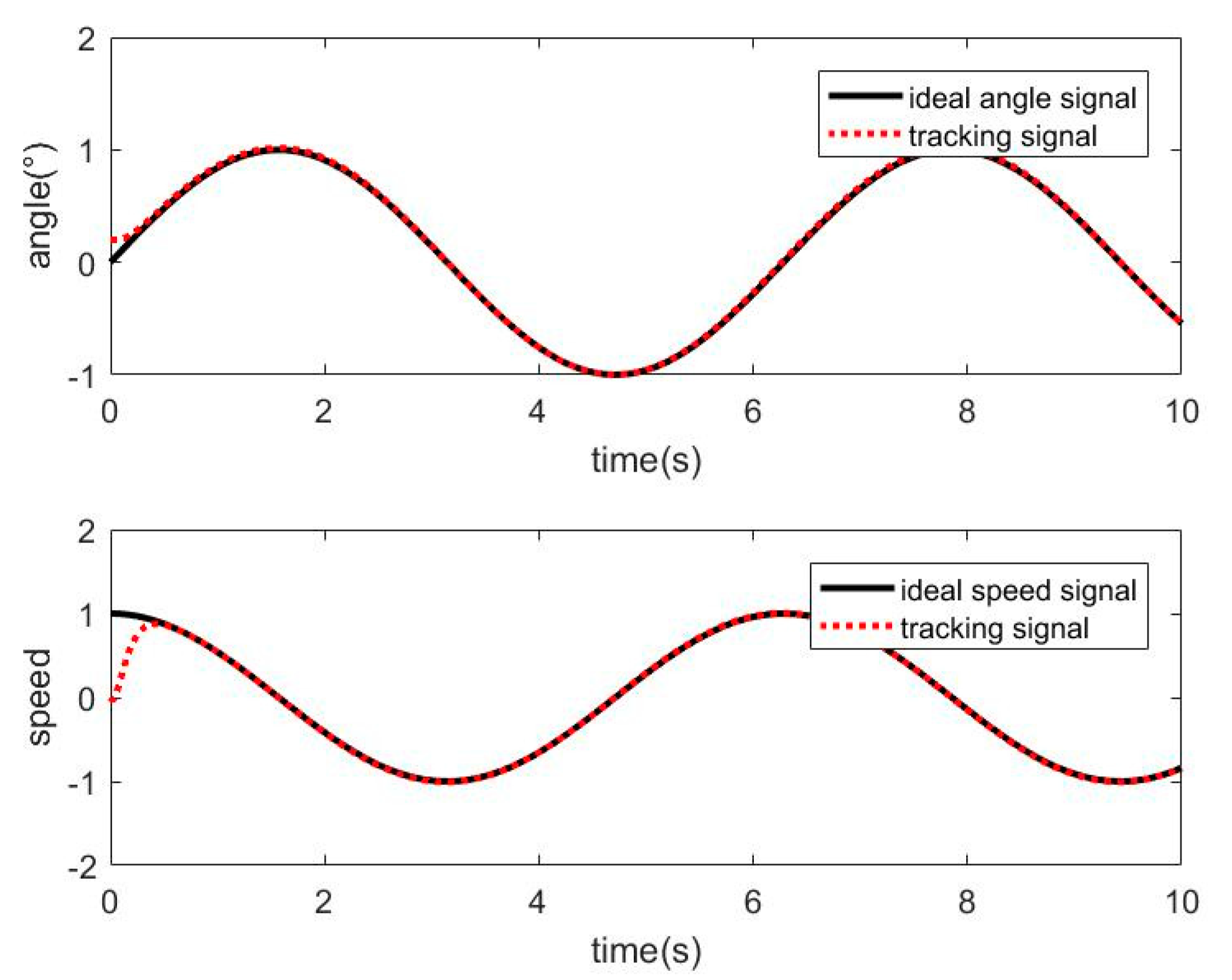
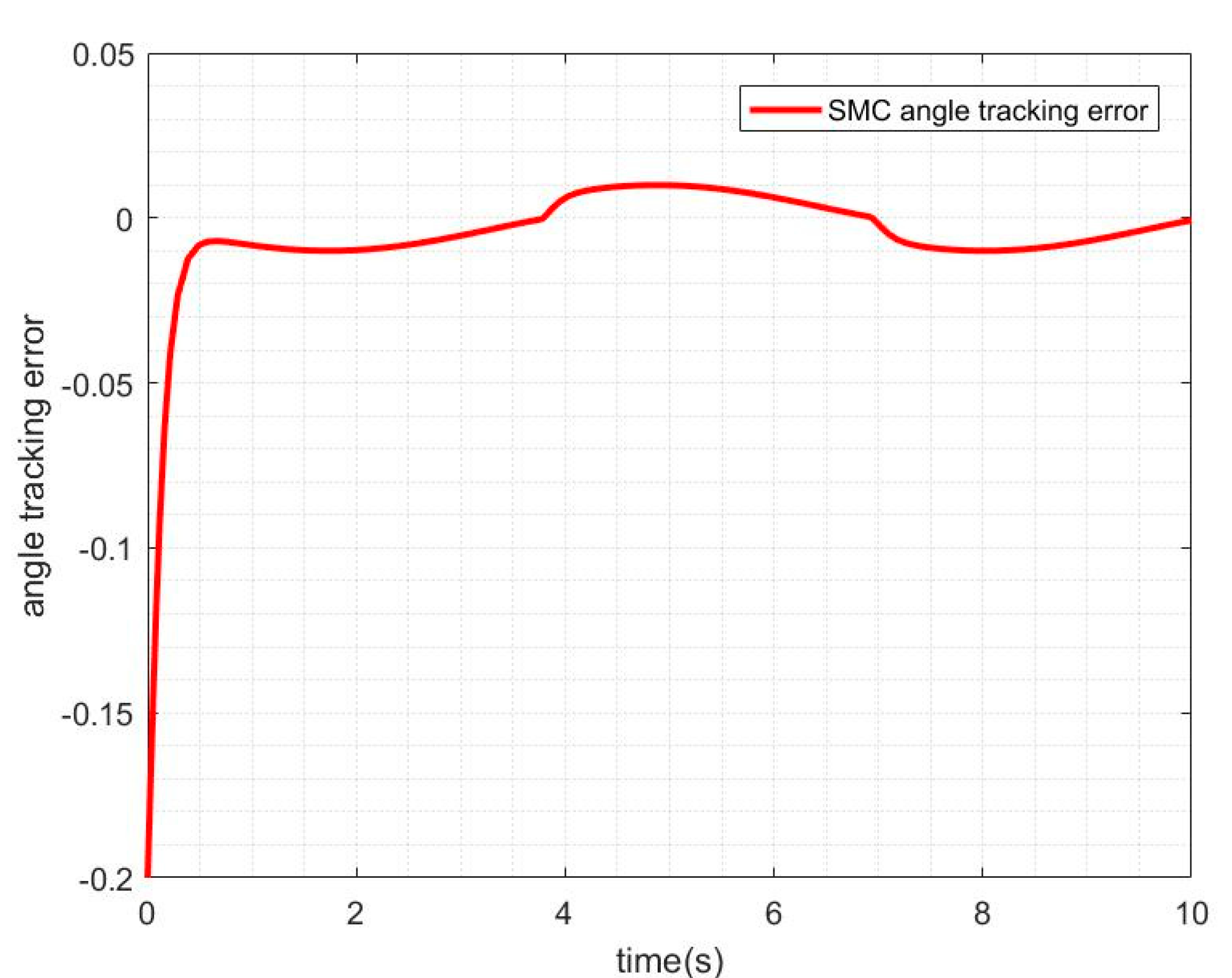
3.2.1. Simulation of SMC without Friction Disturbance
3.2.2. Simulation of SMC with Friction Disturbance
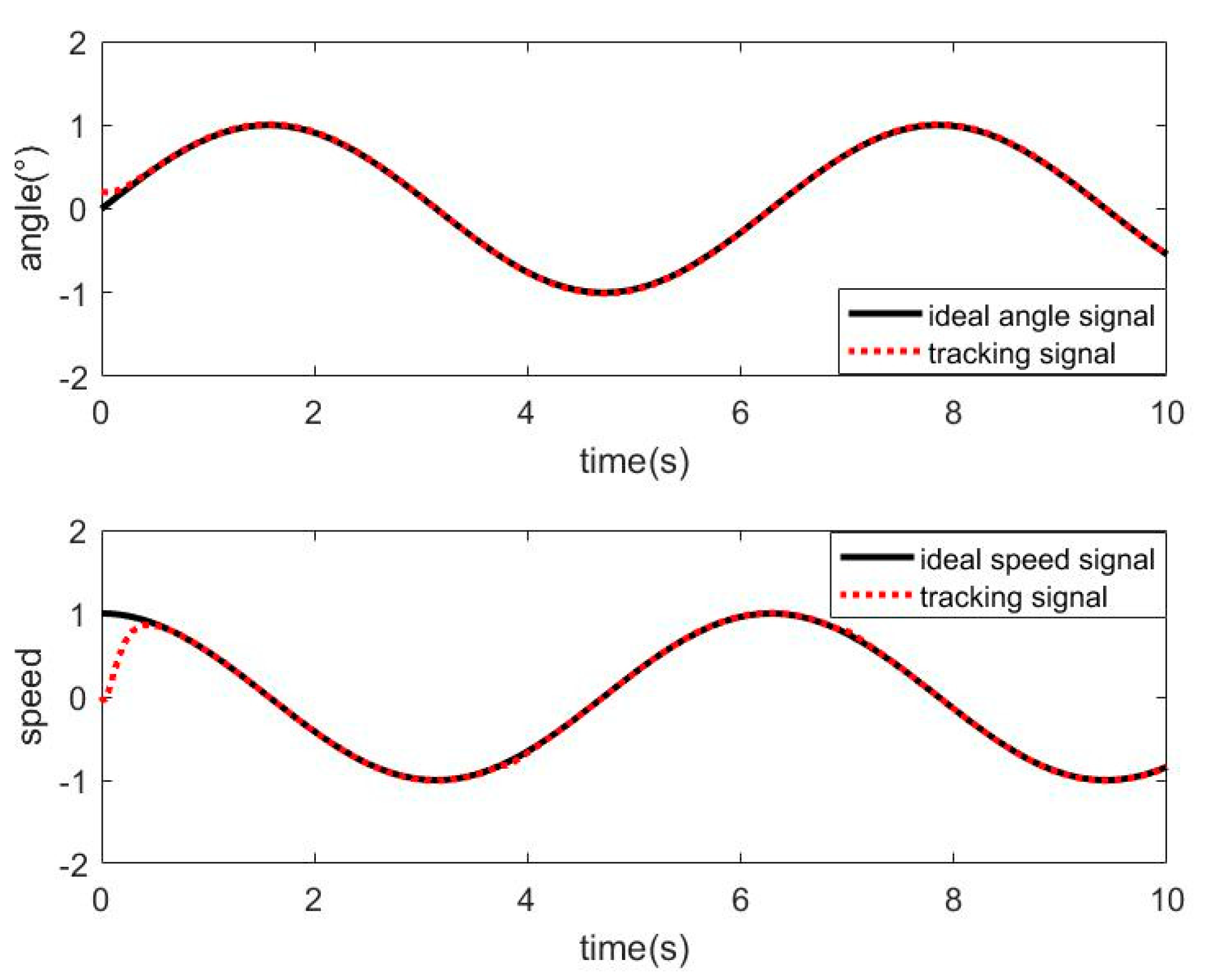
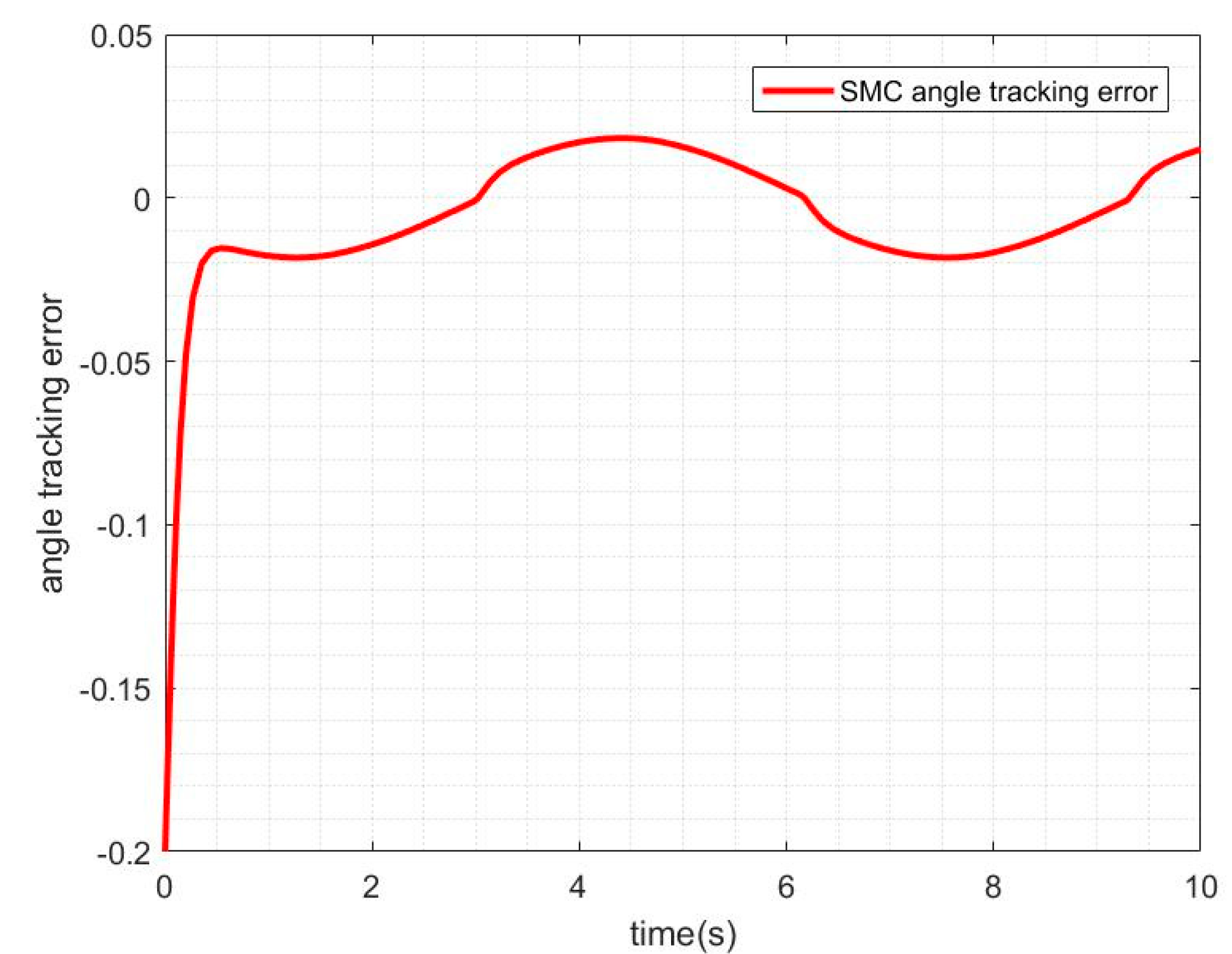
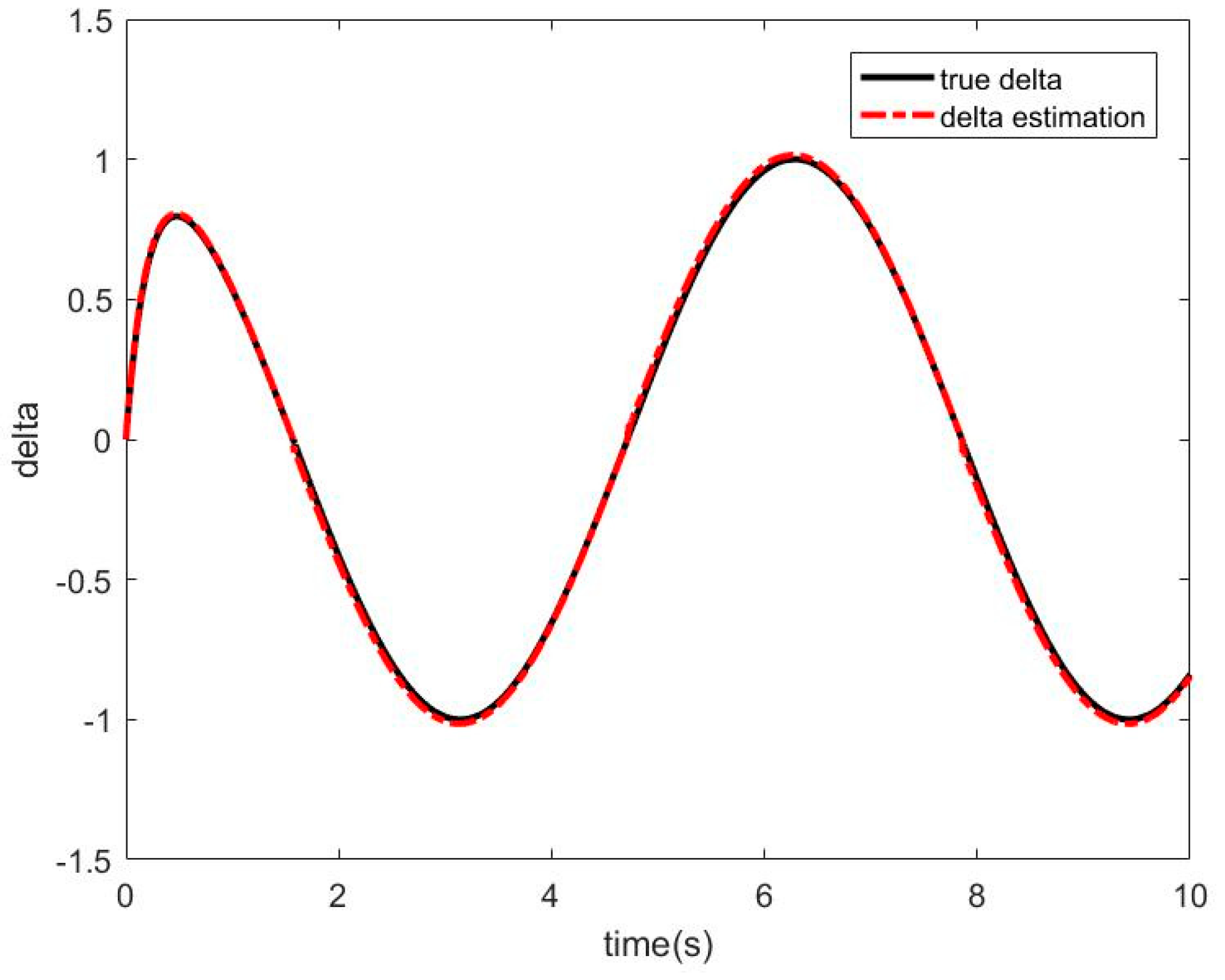
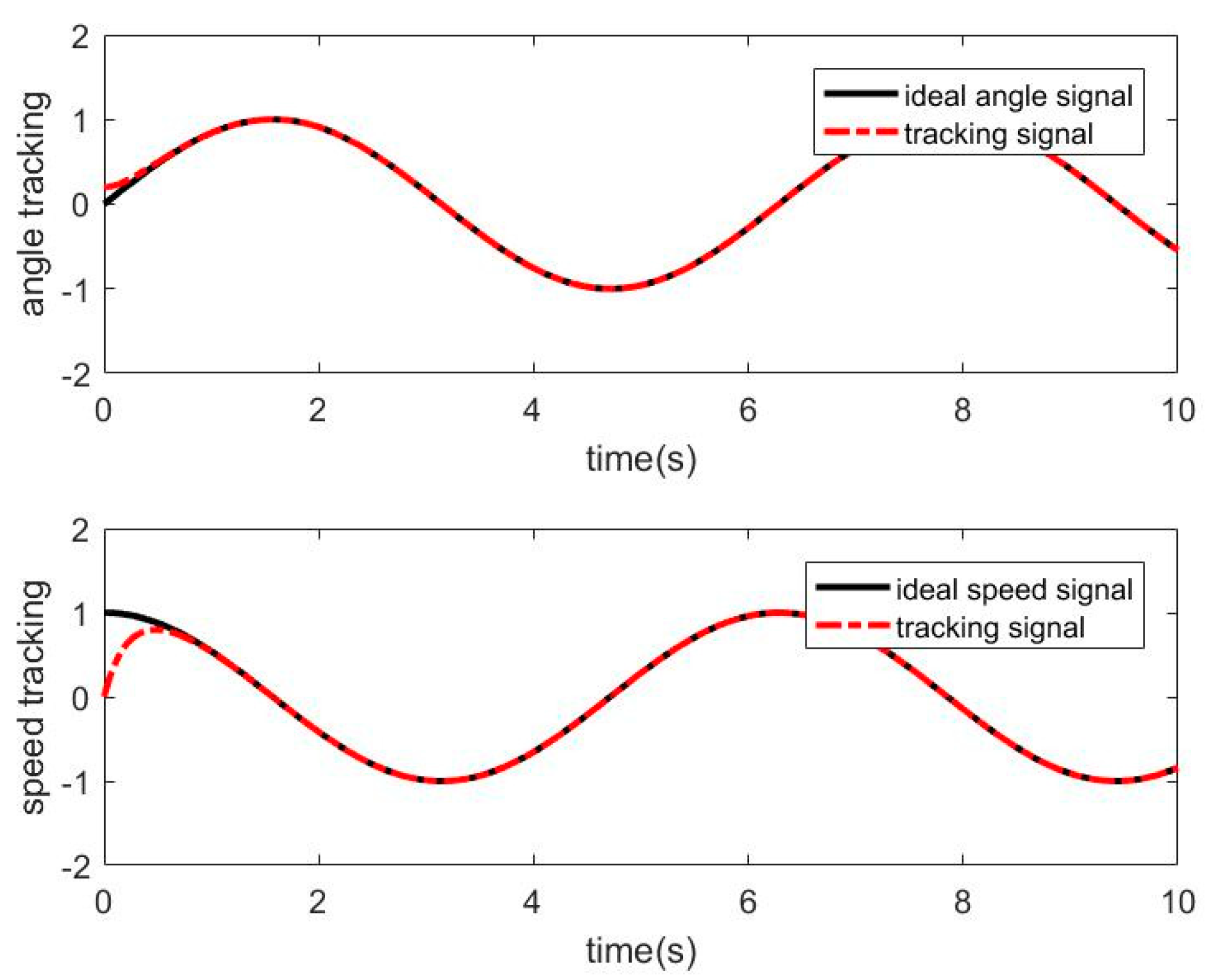
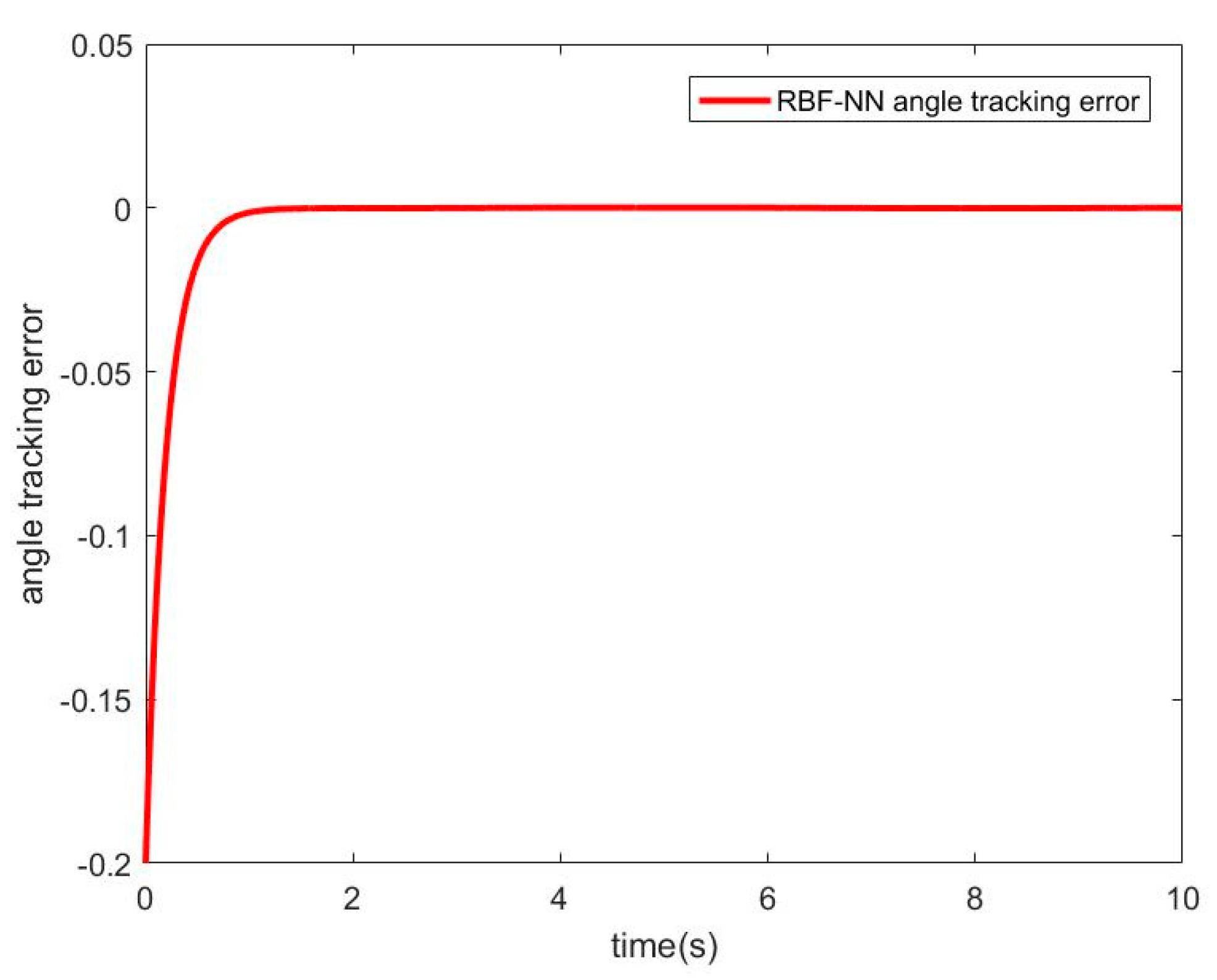
3.2.3. Simulation of RBF−NN ASMC with Friction Disturbance
3.3. Simulation Result Analysis
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Wang, C.; Gan, M.; Qiao, Z. A composite controller strategy for electromechanical actuator using a permanent−magnet synchronous motor. In Proceedings of the 33th Chinese Control Conference, Nanjing, China, 28–30 July 2014; pp. 3846–3851. [Google Scholar]
- Li, H. Improved hybrid robust control method for the electromechanical actuator in aircrafts. Chin. J. Mech. Eng. 2010, 23, 443–450. [Google Scholar]
- Armstrong−Hélouvry, B.; Dupont, P.; De Wit, C.C. A survey of models, analysis tools and compensation methods for the control of machines with friction. Automatica 1994, 30, 1083–1138. [Google Scholar]
- Zhang, M.; Zhou, M.; Liu, H. Friction compensation and observer−based adaptive sliding mode control of electromechanical actuator. Adv. Mech. Eng. 2018, 10. [Google Scholar] [CrossRef]
- Fei, J.; Ding, H.; Hou, S.; Wang, S.; Xin, M. Robust adaptive neural sliding mode approach for tracking control of a MEMS triaxial gyroscope. Int. J. Adv. Robot. Syst. 2012, 9, 20. [Google Scholar]
- Mostaghel, N.; Davis, T. Representations of Coulomb friction for dynamic analysis. Earthq. Eng. Struct. Dyn. 2015, 26, 541–548. [Google Scholar]
- Bo, L.C.; Pavelescu, D. The friction−speed relation and its influence on the critical velocity of stick−slip motion. Wear 1982, 82, 277–289. [Google Scholar]
- Karnopp, D. Computer simulation of stick−slip friction in mechanical dynamic systems. J. Dyn. Syst. Meas. Control. 1985, 107, 100–103. [Google Scholar]
- Dahl, P.R. A Solid Friction Model; Aerospace Corporation: El Segundo, CA, USA, 1968. [Google Scholar]
- Dupont, P.; Hayward, V.; Armstrong, B.; Altpeter, F. Single state elastoplastic friction models. IEEE Trans. Autom. Control 2002, 47, 787–792. [Google Scholar]
- Li, X.; Yao, J.; Zhou, C. Output feedback adaptive robust control of hydraulic actuator with friction and model uncertainty compensation. J. Frankl. Inst. 2017, 354, 5328–5349. [Google Scholar]
- Ferretti, G.; Magnani, G.; Rocco, P. Single and multistate integral friction models. IEEE Trans. Autom. Control 2004, 49, 2292–2297. [Google Scholar]
- Xu, L.; Yao, B. Adaptive robust control of mechanical systems with nonlinear dynamic friction compensation. Int. J. Control 2008, 81, 167–176. [Google Scholar]
- Lee, T.H.; Tan, K.K.; Huang, S. Adaptive friction compensation with a dynamical friction model. IEEE/ASME Trans. Mechatron. 2011, 16, 133–140. [Google Scholar]
- Huang, S. Intelligent friction modeling and compensation using neural network approximations. IEEE Trans. Ind. Electron. 2012, 59, 3342–3349. [Google Scholar]
- Feng, H.; Qiao, W.; Yin, C.; Yu, H.; Cao, D. Identification and compensation of non−linear friction for a electro−hydraulic system. Mech. Mach. Theory 2019, 141, 1–13. [Google Scholar]
- Yan, X.Y.; Mo, B.; He, Y. Design of BP neural network controller for infrared seeker servo system based on Stribeck friction model. Appl. Mech. Mater. 2014, 615, 409–414. [Google Scholar]
- Wang, L.; Chai, T.; Zhai, L. Neural-network-based terminal sliding-mode control of robotic manipulators including actuator dynamics. IEEE Trans. Ind. Electron. 2009, 56, 3296–3304. [Google Scholar]
- Park, B.S.; Yoo, S.J.; Park, J.B.; Choi, Y.H. Adaptive neural sliding mode control of nonholonomic wheeled mobile robots with model uncertainty. IEEE Trans. Control Syst. Technol. 2008, 17, 207–214. [Google Scholar]
- Fan, Q.Y.; Yang, G.H. Adaptive actor-critic design-based integral sliding-mode control for partially unknown nonlinear systems with input disturbances. IEEE Trans. Neural Netw. Learn. Syst. 2017, 27, 165–177. [Google Scholar]
- Han, S.I.; Lee, K.S. Robust friction state observer and recurrent fuzzy neural network design for dynamic friction compensation with backstepping control. Mechatronics 2010, 20, 384–401. [Google Scholar]
- Haidegger, T.; Kovács, L.; Precup, R.E.; Preitl, S.; Benyó, B.; Benyó, Z. Cascade control for telerobotic systems serving space medicine. IFAC Proceedings Volumes 2011, 44, 3759–3764. [Google Scholar]
- Turnip, A.; Panggabean, J.H. Hybrid controller design based magneto-rheological damper lookup table for quarter car suspension. Int. J. Artif. Intell. 2020, 18, 193–206. [Google Scholar]
- Cao, L.; Gao, S.; Zhao, D. Data-driven model-free sliding mode learning control for a class of discrete-time nonlinear systems. Trans. Inst. Meas. Control 2020, 42, 2533–2547. [Google Scholar]
- Lewis, L.F. Neural network control of robot manipulators. IEEE Expert 1996, 11, 64–75. [Google Scholar]
- Horng, J.H. Neural adaptive tracking control of a DC motor. Inf. Sci. 1999, 118, 1–13. [Google Scholar]
- Sadati, N.; Ghadami, R. Adaptive multi-model sliding mode control of robotic manipulators using soft computing. Neurocomputing 2008, 71, 2702–2710. [Google Scholar]
- Lin, F.-J.; Chen, S.-Y.; Shyu, K.-K. Robust dynamic sliding-mode control using adaptive RENN for magnetic levitation system. IEEE Trans. Neural Netw. 2009, 20, 938–951. [Google Scholar]
- Pennestrì, E.; Rossi, V.; Salvini, P.; Valentini, P.P. Review and comparison of dry friction force models. Nonlinear Dyn. 2016, 83, 1785–1801. [Google Scholar]
- Wei, Y.; Li, K.; Wang, X.; Li, D.; Deng, H. Fuzzy sliding mode control based on disturbance observer for electromechanical actuator on guided projectile. In Proceedings of the IEEE International Conference on Unmanned Systems, Beijing, China, 27–29 October 2017. [Google Scholar]
- Popenda, A. Modelling of BLDC motor en.ergized by different converter systems. Przegląd Elektrotechniczny 2013, 86. [Google Scholar]
- Bigras, P. Reduced nonlinear observer for bounded estimation of the static friction model with the Stribeck effect. Syst. Control Lett. 2009, 58, 119–123. [Google Scholar]
- Borello, L.; Dalla Vedova, M.D.L. A dry friction model and robust computational algorithm for reversible or irreversible motion transmissions. Int. J. Mech. Control 2012, 13, 37–48. [Google Scholar]
- Jing, Z.; Yongli, C.; Fengbao, H. Method of adaptive fuzzy sliding mode control for air-to-air missile electromechanical actuator. Ordnance Industry Automation 2014, 33, 42–46. [Google Scholar]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value |
|---|---|
| Rated voltage of BLDC MOTOR | 24 V |
| Rated speed of BLDC MOTOR | 22,000 rpm |
| Torque constant of BLDC MOTOR | 3.6 mNm/A |
| Electromechanical time constant | 5 ms |
| Armature circuit resistance | 0.9 Ω |
| Armature loop inductance | 0.05 mH |
| Back electromotive force constant | 2.5 Vs/rad |
| Reduction ratio | 6 |
| Drive magnification | 60 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ruan, W.; Dong, Q.; Zhang, X.; Li, Z. Friction Compensation Control of Electromechanical Actuator Based on Neural Network Adaptive Sliding Mode. Sensors 2021, 21, 1508. https://doi.org/10.3390/s21041508
Ruan W, Dong Q, Zhang X, Li Z. Friction Compensation Control of Electromechanical Actuator Based on Neural Network Adaptive Sliding Mode. Sensors. 2021; 21(4):1508. https://doi.org/10.3390/s21041508
Chicago/Turabian StyleRuan, Wei, Quanlin Dong, Xiaoyue Zhang, and Zhibing Li. 2021. "Friction Compensation Control of Electromechanical Actuator Based on Neural Network Adaptive Sliding Mode" Sensors 21, no. 4: 1508. https://doi.org/10.3390/s21041508
APA StyleRuan, W., Dong, Q., Zhang, X., & Li, Z. (2021). Friction Compensation Control of Electromechanical Actuator Based on Neural Network Adaptive Sliding Mode. Sensors, 21(4), 1508. https://doi.org/10.3390/s21041508