
Text Detection Using Multi-Stage Region Proposal Network Sensitive to Text Scale †



Abstract
1. Introduction
2. Related Works
2.1. Object Detection
2.2. Strategy Using Multi-Features
2.3. Text Detection
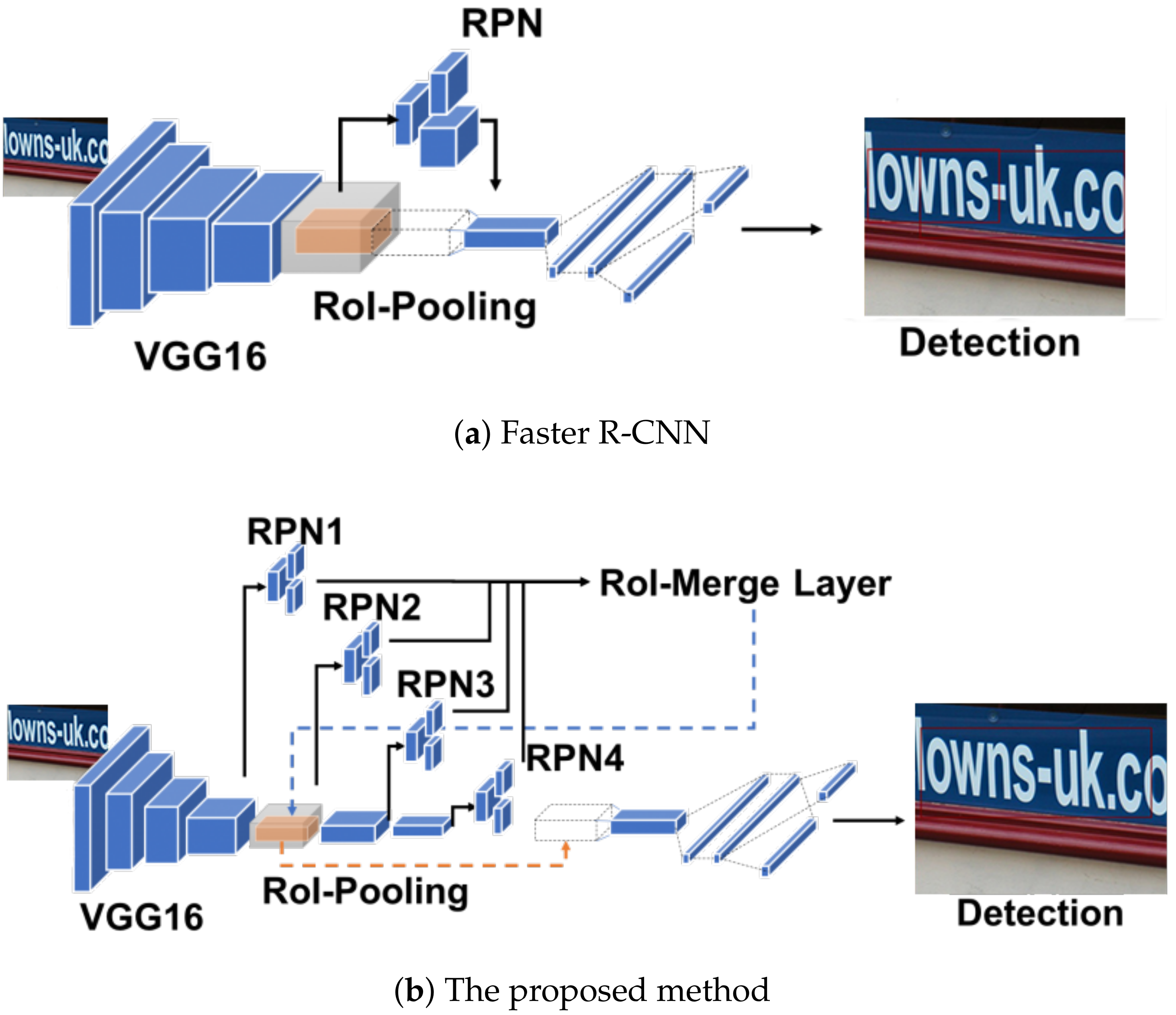
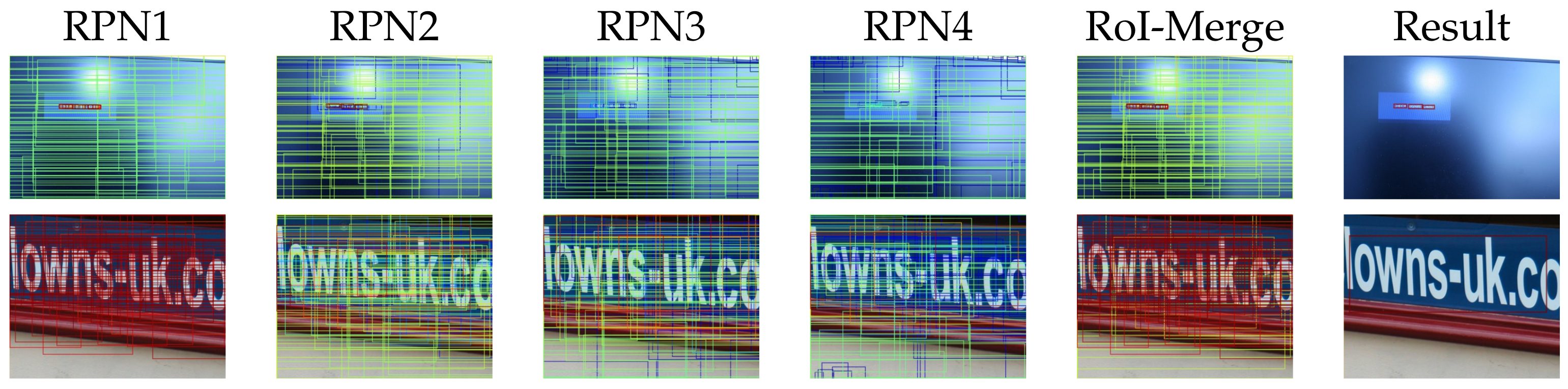
3. The Proposed Methods
3.1. Scale-Sensitive Pyramid
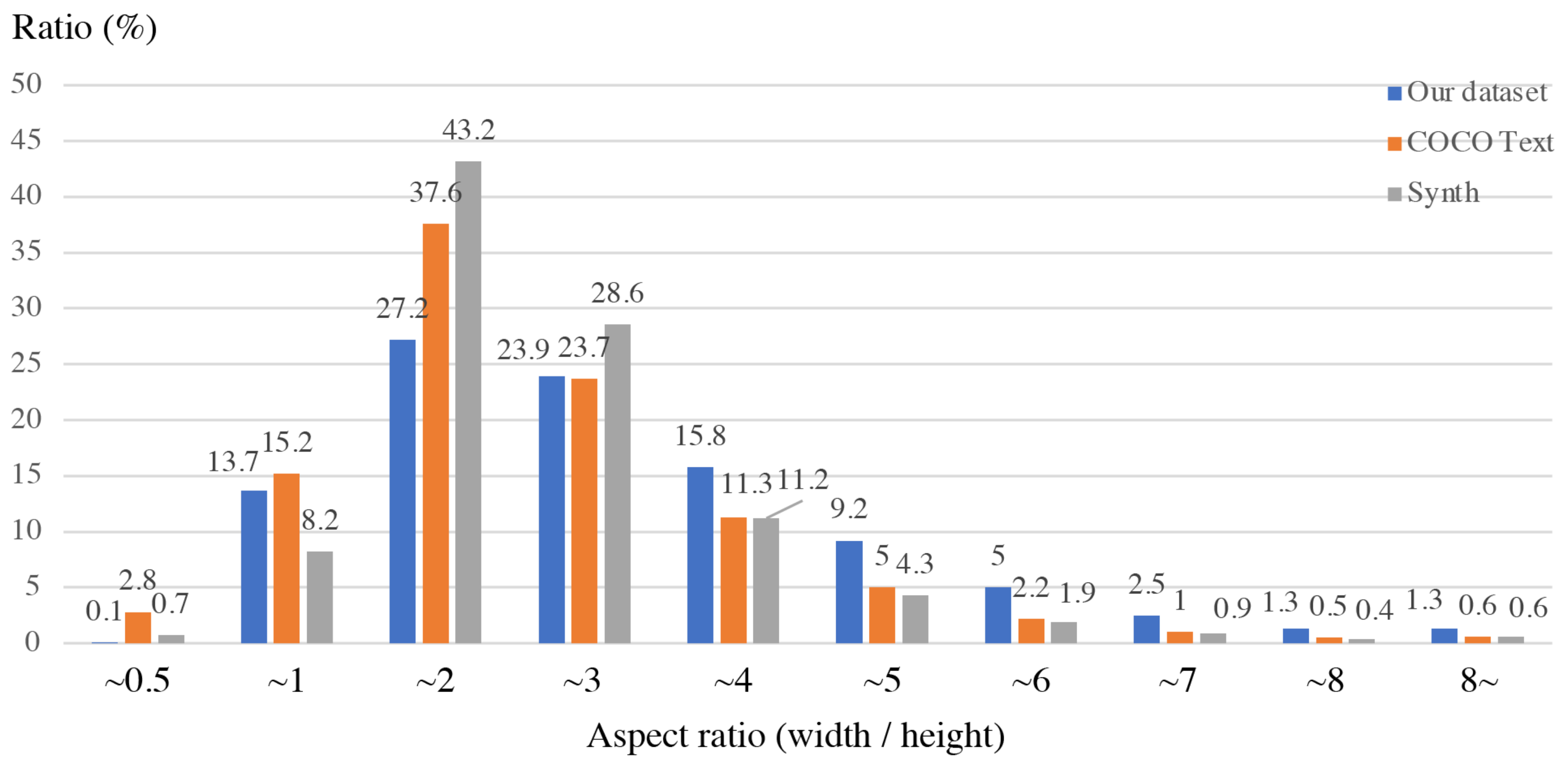
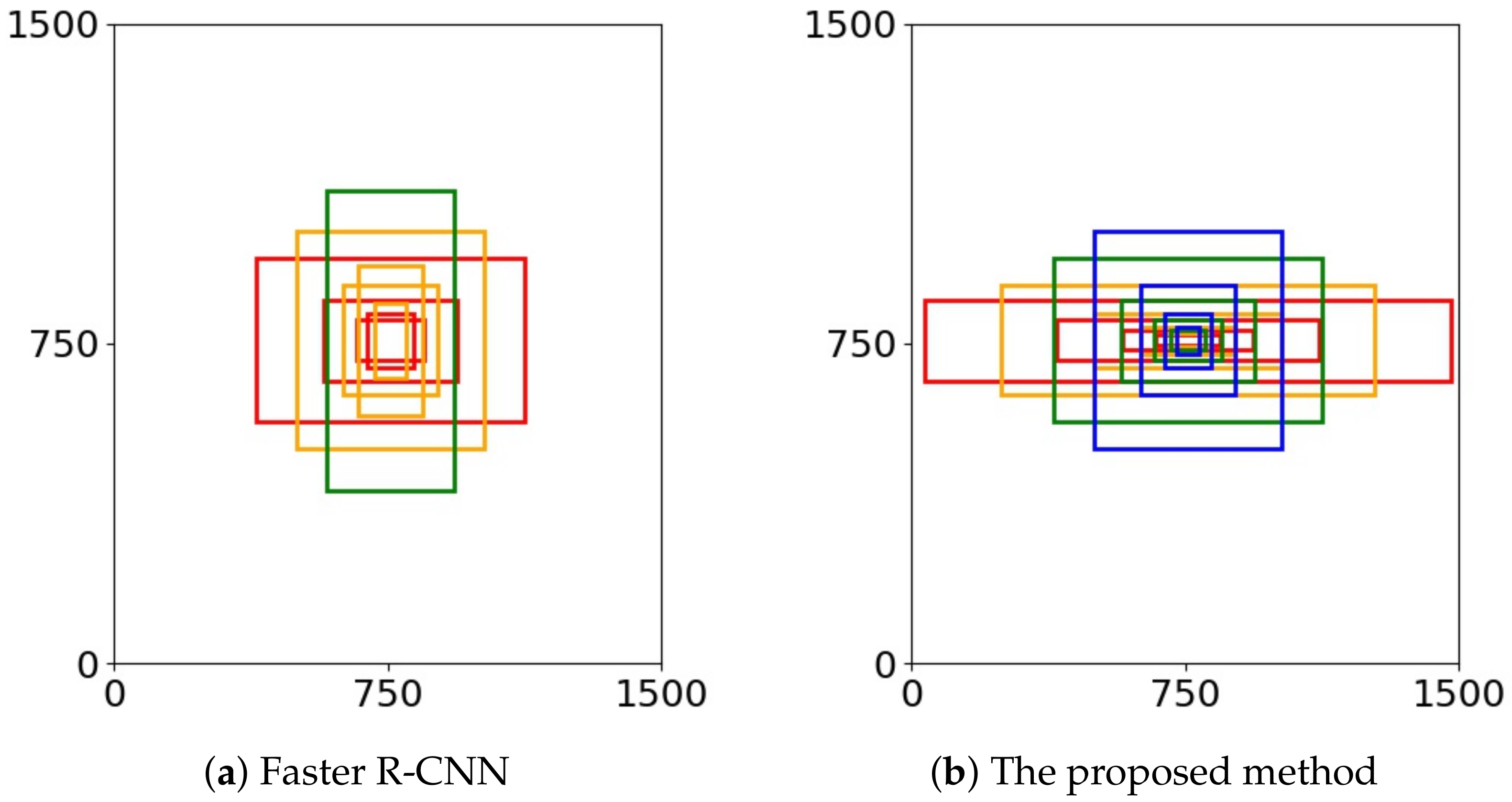
3.2. Anchor for Text Detection
3.3. Training Strategy
4. Experiments
4.1. Datasets and Evaluation Metrics
4.2. Numerical Results
4.3. Ablation Study
4.4. Scale Sensitive Strategy
4.5. Failure Analysis
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Huang, Z.; Lin, J.; Yang, H.; Wang, H.; Bai, T.; Liu, Q.; Pang, Y. An Algorithm Based on Text Position Correction and Encoder-Decoder Network for Text Recognition in the Scene Image of Visual Sensors. Sensors 2020, 20, 2942. [Google Scholar] [CrossRef]
- Li, Z.; Zhou, Y.; Sheng, Q.; Chen, K.; Huang, J. A High-Robust Automatic Reading Algorithm of Pointer Meters Based on Text Detection. Sensors 2020, 20, 5946. [Google Scholar] [CrossRef] [PubMed]
- Ren, S.; He, K.; Girshick, R.; Sun, J. Faster R-CNN: Towards Real-Time Object Detection with Region Proposal Networks. IEEE Trans. Pattern Anal. Mach. Intell. 2017, 39, 1137–1149. [Google Scholar] [CrossRef] [PubMed]
- Redmon, J.; Divvala, S.; Girshick, R.; Farhadi, A. You Only Look Once: Unified, Real-Time Object Detection. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Las Vegas, NV, USA, 27–30 June 2016; pp. 779–788. [Google Scholar]
- Redmon, J.; Farhadi, A. YOLO9000: Better, Faster, Stronger. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Honolulu, HI, USA, 21–26 July 2017; pp. 6517–6525. [Google Scholar]
- Redmon, J.; Farhadi, A. YOLOv3: An Incremental Improvement. arXiv 2018, arXiv:1804.02767. [Google Scholar]
- Liu, W.; Anguelov, D.; Erhan, D.; Szegedy, C.; Reed, S.; Fu, C.Y.; Berg, A.C. SSD: Single Shot MultiBox Detector. In Computer Vision—ECCV; Leibe, B., Matas, J., Sebe, N., Welling, M., Eds.; Springer: Cham, Switzerland, 2016; pp. 21–37. [Google Scholar]
- Lin, T.; Dollár, P.; Girshick, R.; He, K.; Hariharan, B.; Belongie, S. Feature Pyramid Networks for Object Detection. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Honolulu, HI, USA, 21–26 July 2017; pp. 936–944. [Google Scholar]
- Kong, T.; Yao, A.; Chen, Y.; Sun, F. HyperNet: Towards Accurate Region Proposal Generation and Joint Object Detection. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Las Vegas, NV, USA, 27–30 June 2016; pp. 845–853. [Google Scholar]
- He, K.; Zhang, X.; Ren, S.; Sun, J. Deep residual learning for image recognition. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Las Vegas, NV, USA, 27–30 June 2016; pp. 770–778. [Google Scholar]
- Wang, H.; Wang, Q.; Gao, M.; Li, P.; Zuo, W. Multi-scale Location-aware Kernel Representation for Object Detection. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Salt Lake City, UT, USA, 18–23 June 2018; pp. 1248–1257. [Google Scholar]
- Nagaoka, Y.; Miyazaki, T.; Sugaya, Y.; Omachi, S. Text Detection by Faster R-CNN with Multiple Region Proposal Networks. In Proceedings of the 2017 14th IAPR International Conference on Document Analysis and Recognition (ICDAR), Kyoto, Japan, 9–15 November 2017; pp. 15–20. [Google Scholar]
- Felzenszwalb, P.; McAllester, D.; Ramanan, D. A discriminatively trained, multiscale, deformable part model. In Proceedings of the Computer Vision and Pattern Recognition, Anchorage, AK, USA, 23–28 June 2008; pp. 1–8. [Google Scholar]
- Ren, X.; Ramanan, D. Histograms of sparse codes for object detection. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Portland, OR, USA, 23–28 June 2013; pp. 3246–3253. [Google Scholar]
- Girshick, R.B.; Donahue, J.; Darrell, T.; Malik, J. Rich Feature Hierarchies for Accurate Object Detection and Semantic Segmentation. In Proceedings of the 2014 IEEE Conference on Computer Vision and Pattern Recognition, Columbus, OH, USA, 23–28 June 2014; pp. 580–587. [Google Scholar]
- Uijlings, J.R.R.; van de Sande, K.E.A.; Gevers, T.; Smeulders, A.W.M. Selective Search for Object Recognition. Int. J. Comput. Vis. 2013, 104, 154–171. [Google Scholar] [CrossRef]
- Girshick, R. Fast R-CNN. In Proceedings of the IEEE International Conference on Computer Vision (ICCV), Santiago, Chile, 7–13 December 2015. [Google Scholar]
- Simonyan, K.; Zisserman, A. Very Deep Convolutional Networks for Large-Scale Image Recognition. In Proceedings of the International Conference on Learning Representations, San Diego, CA, USA, 7–9 May 2015. [Google Scholar]
- Kong, T.; Sun, F.; Yao, A.; Liu, H.; Lu, M.; Chen, Y. Ron: Reverse connection with objectness prior networks for object detection. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Honolulu, HI, USA, 21–26 July 2017; Volume 1, p. 2. [Google Scholar]
- Ronneberger, O.; Fischer, P.; Brox, T. U-net: Convolutional networks for biomedical image segmentation. In Proceedings of the International Conference on Medical Image Computing and Computer-Assisted Intervention, Munich, Germany, 5–9 October 2015; pp. 234–241. [Google Scholar]
- Badrinarayanan, V.; Kendall, A.; Cipolla, R. Segnet: A deep convolutional encoder-decoder architecture for image segmentation. arXiv 2015, arXiv:1511.00561. [Google Scholar] [CrossRef]
- Yu, C.; Wang, J.; Peng, C.; Gao, C.; Yu, G.; Sang, N. Bisenet: Bilateral segmentation network for real-time semantic segmentation. arXiv 2018, arXiv:1808.00897. [Google Scholar]
- Wang, K.; Babenko, B.; Belongie, S. End-to-end scene text recognition. In Proceedings of the International Conference on Computer Vision, Barcelona, Spain, 6–13 November 2011; pp. 1457–1464. [Google Scholar]
- Ozuysal, M.; Calonder, M.; Lepetit, V.; Fua, P. Fast Keypoint Recognition Using Random Ferns. IEEE Trans. Pattern Anal. Mach. Intell. 2010, 32, 448–461. [Google Scholar] [CrossRef] [PubMed]
- Felzenszwalb, P.F.; Huttenlocher, D.P. Pictorial Structures for Object Recognition. Int. J. Comput. Vis. 2005, 61, 55–79. [Google Scholar] [CrossRef]
- Wang, T.; Wu, D.J.; Coates, A.; Ng, A.Y. End-to-end text recognition with convolutional neural networks. In Proceedings of the 21st International Conference on Pattern Recognition (ICPR), Tsukuba, Japan, 11–15 November 2012; pp. 3304–3308. [Google Scholar]
- Milyaev, S.; Barinova, O.; Novikova, T.; Kohli, P.; Lempitsky, V. Image Binarization for End-to-End Text Understanding in Natural Images. In Proceedings of the 12th International Conference on Document Analysis and Recognition, Washington, DC, USA, 25–28 August 2013; pp. 128–132. [Google Scholar]
- Opitz, M.; Diem, M.; Fiel, S.; Kleber, F.; Sablatnig, R. End-to-End Text Recognition Using Local Ternary Patterns, MSER and Deep Convolutional Nets. In Proceedings of the 11th IAPR International Workshop on Document Analysis Systems, Tours, France, 7–10 April 2014; pp. 186–190. [Google Scholar]
- Matas, J.; Chum, O.; Urban, M.; Pajdla, T. Robust wide-baseline stereo from maximally stable extremal regions. Image Vis. Comput. 2004, 22, 761–767. [Google Scholar] [CrossRef]
- Jaderberg, M.; Simonyan, K.; Vedaldi, A.; Zisserman, A. Reading Text in the Wild with Convolutional Neural Networks. Int. J. Comput. Vis. 2016, 116, 1–20. [Google Scholar] [CrossRef]
- Zitnick, C.L.; Dollár, P. Edge boxes: Locating object proposals from edges. In European Conference on Computer Vision; Springer: Cham, Switzerland, 2014; pp. 391–405. [Google Scholar]
- Dollár, P.; Appel, R.; Belongie, S.; Perona, P. Fast feature pyramids for object detection. IEEE Trans. Pattern Anal. Mach. Intell. 2014, 36, 1532–1545. [Google Scholar] [CrossRef] [PubMed]
- Tian, S.; Pan, Y.; Huang, C.; Lu, S.; Yu, K.; Lim Tan, C. Text flow: A unified text detection system in natural scene images. In Proceedings of the IEEE International Conference on Computer Vision, Santiago, Chile, 7–13 December 2015; pp. 4651–4659. [Google Scholar]
- Chen, X.; Yuille, A.L. Detecting and reading text in natural scenes. In Proceedings of the 2004 IEEE Computer Society Conference on Computer Vision and Pattern Recognition, Washington, DC, USA, 27 June–2 July 2004; Volume 2, p. II. [Google Scholar]
- Liao, M.; Shi, B.; Bai, X.; Wang, X.; Liu, W. TextBoxes: A Fast Text Detector with a Single Deep Neural Network. Proc. AAAI Conf. Artif. Intell. 2017, 31, 4161–4167. [Google Scholar]
- Tian, Z.; Huang, W.; He, T.; He, P.; Qiao, Y. Detecting text in natural image with connectionist text proposal network. In European Conference on Computer Vision; Springer: Cham, Switzerland, 2016; pp. 56–72. [Google Scholar]
- Zhong, Z.; Jin, L.; Zhang, S.; Feng, Z. Deeptext: A unified framework for text proposal generation and text detection in natural images. arXiv 2016, arXiv:1605.07314. [Google Scholar]
- Szegedy, C.; Liu, W.; Jia, Y.; Sermanet, P.; Reed, S.; Anguelov, D.; Erhan, D.; Vanhoucke, V.; Rabinovich, A. Going deeper with convolutions. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Boston, MA, USA, 7–12 June 2015; pp. 1–9. [Google Scholar]
- Tang, Y.; Wu, X. Scene text detection and segmentation based on cascaded convolution neural networks. IEEE Trans. Image Process. 2017, 26, 1509–1520. [Google Scholar] [CrossRef] [PubMed]
- Dai, Y.; Huang, Z.; Gao, Y.; Xu, Y.; Chen, K.; Guo, J.; Qiu, W. Fused text segmentation networks for multi-oriented scene text detection. In Proceedings of the 24th International Conference on Pattern Recognition (ICPR), Beijing, China, 20–24 August 2018; pp. 3604–3609. [Google Scholar]
- Lyu, P.; Yao, C.; Wu, W.; Yan, S.; Bai, X. Multi-oriented scene text detection via corner localization and region segmentation. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Salt Lake City, UT, USA, 18–23 June 2018; pp. 7553–7563. [Google Scholar]
- Zhou, X.; Yao, C.; Wen, H.; Wang, Y.; Zhou, S.; He, W.; Liang, J. EAST: An efficient and accurate scene text detector. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Honolulu, HI, USA, 21–26 July 2017; pp. 2642–2651. [Google Scholar]
- He, W.; Zhang, X.Y.; Yin, F.; Liu, C.L. Deep direct regression for multi-oriented scene text detection. arXiv 2017, arXiv:1703.08289. [Google Scholar]
- Shi, B.; Bai, X.; Yao, C. An end-to-end trainable neural network for image-based sequence recognition and its application to scene text recognition. IEEE Trans. Pattern Anal. Mach. Intell. 2017, 39, 2298–2304. [Google Scholar] [CrossRef] [PubMed]
- Graves, A.; Fernández, S.; Gomez, F.; Schmidhuber, J. Connectionist temporal classification: Labelling unsegmented sequence data with recurrent neural networks. In Proceedings of the 23rd International Conference on Machine Learning; Association for Computing Machinery: New York, NY, USA, 2006; pp. 369–376. [Google Scholar]
- Bušta, M.; Neumann, L.; Matas, J. Deep textspotter: An end-to-end trainable scene text localization and recognition framework. In Proceedings of the IEEE International Conference on Computer Vision (ICCV), Venice, Italy, 22–29 October 2017; pp. 2223–2231. [Google Scholar]
- Li, H.; Wang, P.; Shen, C. Towards end-to-end text spotting with convolutional recurrent neural networks. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Honolulu, HI, USA, 21–26 July 2017; pp. 5238–5246. [Google Scholar]
- Liu, X.; Liang, D.; Yan, S.; Chen, D.; Qiao, Y.; Yan, J. FOTS: Fast Oriented Text Spotting with a Unified Network. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Salt Lake City, UT, USA, 18–23 June 2018; pp. 5676–5685. [Google Scholar]
- Veit, A.; Matera, T.; Neumann, L.; Matas, J.; Belongie, S. COCO-Text: Dataset and Benchmark for Text Detection and Recognition in Natural Images. arXiv 2016, arXiv:1601.07140. [Google Scholar]
- Gupta, A.; Vedaldi, A.; Zisserman, A. Synthetic Data for Text Localisation in Natural Images. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Las Vegas, NV, USA, 27–30 June 2016. [Google Scholar]
- Karatzas, D.; Gomez-Bigorda, L.; Nicolaou, A.; Ghosh, S.; Bagdanov, A.; Iwamura, M.; Matas, J.; Neumann, L.; Chandrasekhar, V.R.; Lu, S.; et al. ICDAR 2015 competition on Robust Reading. In Proceedings of the 2015 13th International Conference on Document Analysis and Recognition (ICDAR), Tunis, Tunisia, 23–26 August 2015; pp. 1156–1160. [Google Scholar]
- Nayef, N.; Yin, F.; Bizid, I.; Choi, H.; Feng, Y.; Karatzas, D.; Luo, Z.; Pal, U.; Rigaud, C.; Chazalon, J.; et al. ICDAR2017 Robust Reading Challenge on Multi-Lingual Scene Text Detection and Script Identification - RRC-MLT. In Proceedings of the 2017 14th IAPR International Conference on Document Analysis and Recognition (ICDAR), Kyoto, Japan, 9–15 November 2017; Volume 1, pp. 1454–1459. [Google Scholar]
- Wolf, C.; Jolion, J.M. Object count/area graphs for the evaluation of object detection and segmentation algorithms. Int. J. Doc. Anal. Recognit. 2006, 8, 280–296. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Method | Input Scale | Recall | Precision | F-Score | Time |
|---|---|---|---|---|---|
| Gupta+ [50] | Multiple | 75.5 | 92.0 | 83.0 | - |
| He+ [43] | Multiple | 81 | 92 | 86 | 0.9 s |
| Liao+ [35] | Multiple | 83 | 89 | 86 | 0.73 s |
| Tian+ [33] | Single | 75.9 | 85.2 | 80.3 | - |
| Zhong+ [37] | Single | 83 | 87 | 85 | 1.7 s |
| Baseline Faster R-CNN [3] | Single | 70.3 | 83 | 76.1 | 0.101 s |
| Proposed | Single | 76.3 | 91.8 | 83.3 | 0.137 s |
| Proposed (competition mode) | Single | 87.1 | 87.7 | 87.4 | - |
| Method | Anchor | SSP-RPNs | Recall | Precision | F-Score | Time |
|---|---|---|---|---|---|---|
| Baseline | 70.28 | 82.99 | 76.11 | 0.101 | ||
| Anchor | ✓ | 77.21 | 88.35 | 82.40 | 0.103 | |
| SSP-RPNs | ✓ | 70.26 | 86.63 | 77.86 | 0.125 | |
| Proposed | ✓ | ✓ | 76.29 | 91.81 | 83.33 | 0.137 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Nagaoka, Y.; Miyazaki, T.; Sugaya, Y.; Omachi, S. Text Detection Using Multi-Stage Region Proposal Network Sensitive to Text Scale. Sensors 2021, 21, 1232. https://doi.org/10.3390/s21041232
Nagaoka Y, Miyazaki T, Sugaya Y, Omachi S. Text Detection Using Multi-Stage Region Proposal Network Sensitive to Text Scale. Sensors. 2021; 21(4):1232. https://doi.org/10.3390/s21041232
Chicago/Turabian StyleNagaoka, Yoshito, Tomo Miyazaki, Yoshihiro Sugaya, and Shinichiro Omachi. 2021. "Text Detection Using Multi-Stage Region Proposal Network Sensitive to Text Scale" Sensors 21, no. 4: 1232. https://doi.org/10.3390/s21041232
APA StyleNagaoka, Y., Miyazaki, T., Sugaya, Y., & Omachi, S. (2021). Text Detection Using Multi-Stage Region Proposal Network Sensitive to Text Scale. Sensors, 21(4), 1232. https://doi.org/10.3390/s21041232