
Digital Twin Generation: Re-Conceptualizing Agent Systems for Behavior-Centered Cyber-Physical System Development


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
2. Methodology
3. Digital Twins as Behavioral Design Encapsulations
- represent a metaphor when designing complex, distributed intelligent systems in terms of autonomous units of action.
- provide a set of technologies for orchestrating intelligence.
- allow the homo-morphological modeling of real-world scenarios and, thus, enable meeting human-centered needs in digital systems, e.g., with respect to organizing work.
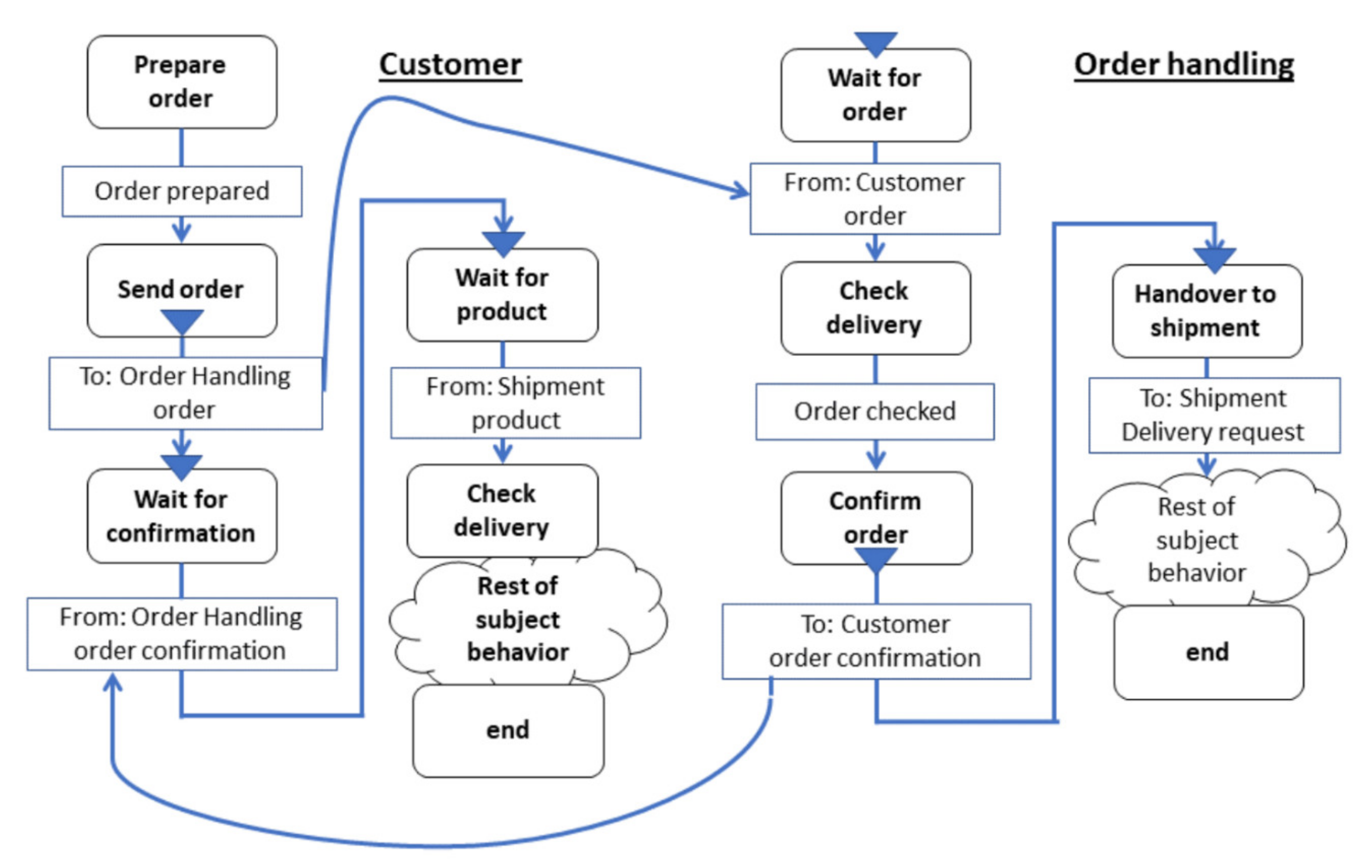
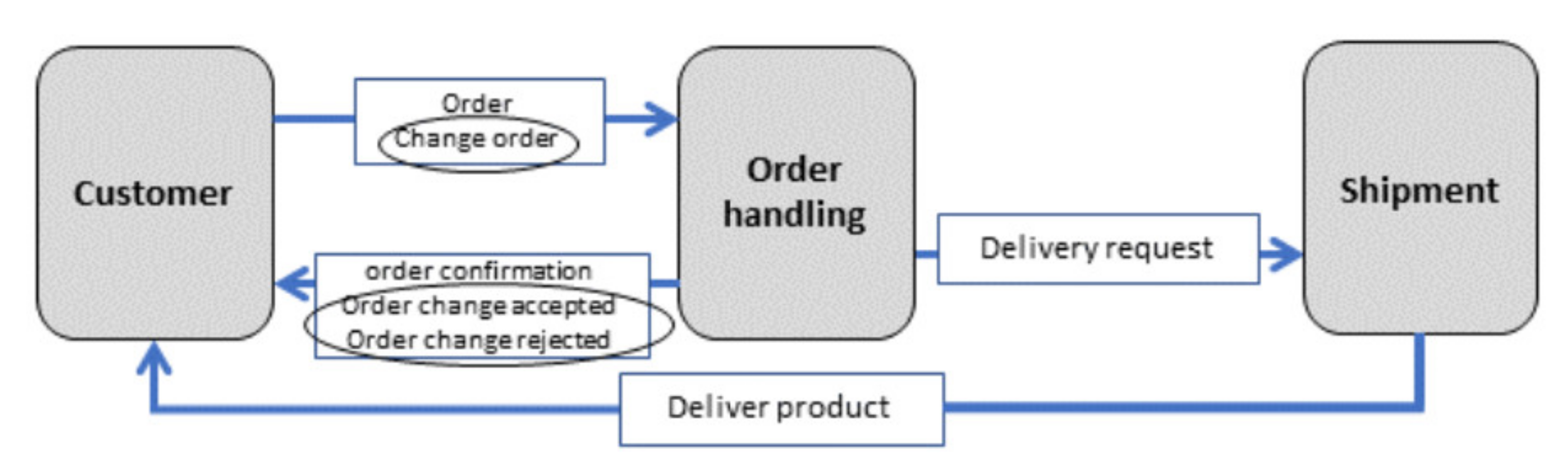
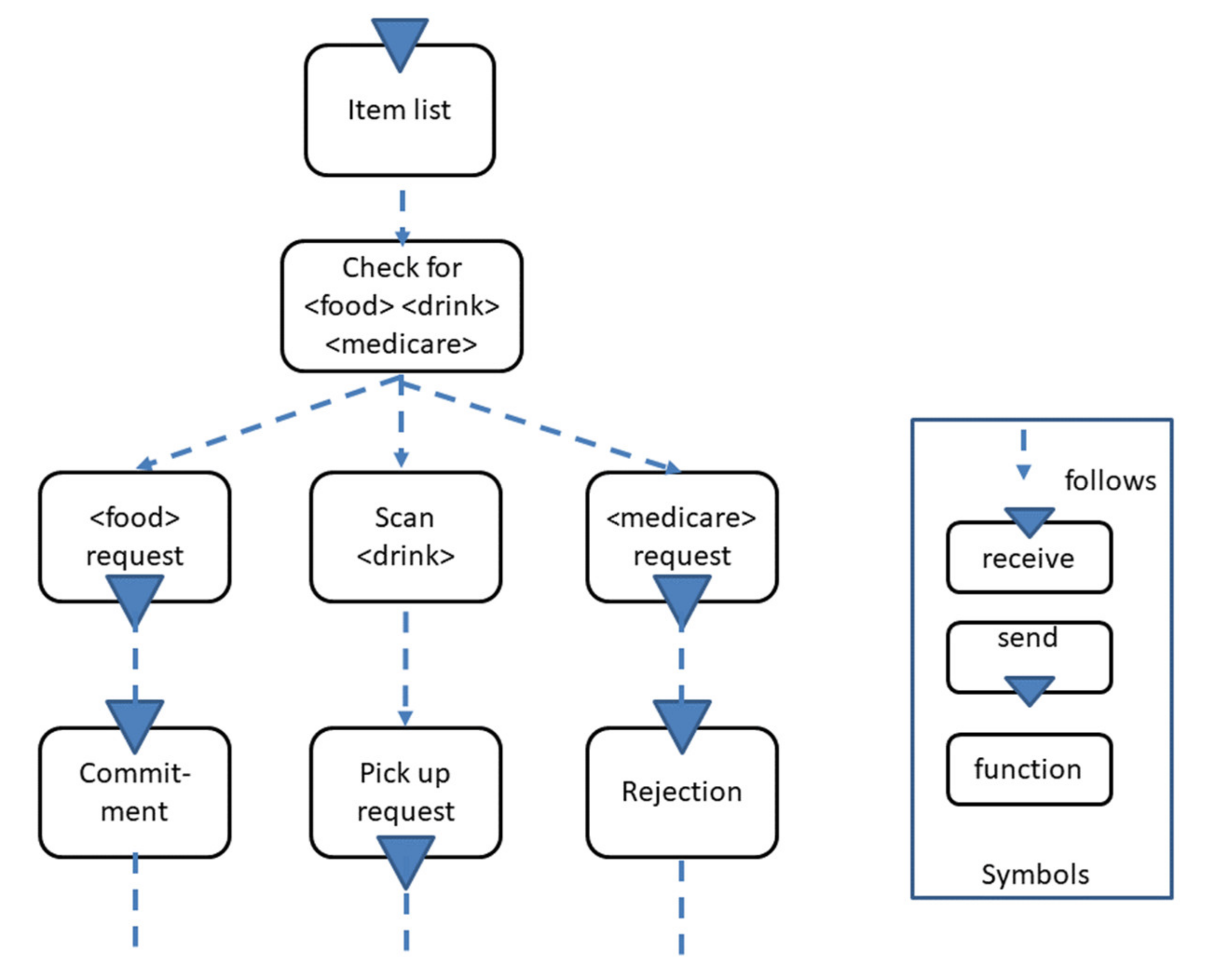
- Behavior encapsulations as a part of process representations have two constitutive elements: active entities (termed subjects) and their mutual interactions. Both are represented in Subject Interaction Diagrams (SIDs). Each of those active entities encapsulate behavior sequences, explicitly representing both functional activities (e.g., task performance) and communication—namely, sending and receiving messages. Encapsulated behavior is represented in Subject Behavior Diagrams (SBDs). Consequently, each subject of an SID is detailed in terms of encapsulated behavior through an SBD.
- Subjects’ interactions include data. Therefore, they exchange messages. These messages can include data, e.g., (business) objects, which are processed by the receiving subject (as detailed in the SBD of the receiving subject).
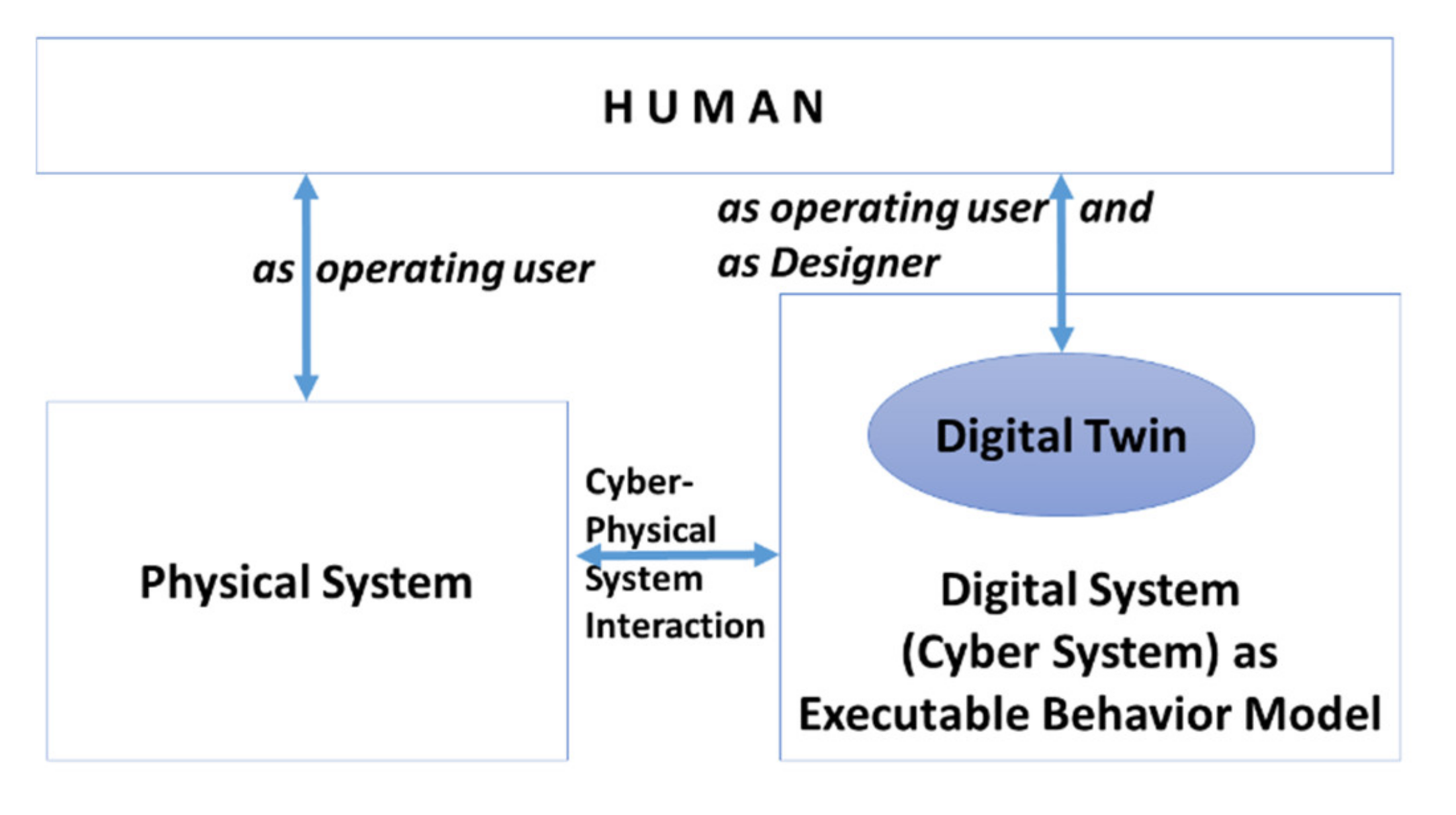
- Subject representation abstracts from organizational implementation. Since subjects are behavior abstractions, by the time of modeling, e.g., when designing a CPS (component), it is not specified whether a subject’s behavior is instantiated by humans, digital or physical systems, or a combination of those. This property is essential for representing digital twins as a baseline and for control purposes (see above). For instance, the grocery shop can either be a web shop or a physical one or any combination that can be controlled by a subject-oriented digital twin. The activities of shopping assistant can either be performed by humans, digital entities, physical systems, or a combination of those.
- Subject representations are executable. The control flow of each subject specifications contains functional and interaction activities that can be executed automatically for validation and operation. Like in reality, the runtime behavior of a subject-oriented model is designed to operate subjects in parallel. They exchange messages in an asynchronous or synchronous way, leading to a concurrent distributed system. For the automated execution of subject-oriented models, several tools have been developed, including Metasonic (see metasonic.de), actnconnect (see actnconnect.de), and UeberFlow (see i2pm.net). The CPS behavior in terms of business operation can be validated and experienced interactively before putting it into operation.
- Subjects act autonomously in a network. Any system or process consists of autonomously acting components, forming a network of interacting entities (subjects) to achieve a common goal. Besides sending and receiving messages, subject actions include local actions that do not involve interactions, such as calculating a value, and interactions, i.e., message exchanges.
- (i)
- A subject is identified by a name and represents a role in a process.
- (ii)
- A message has a label and represents the exchange of information between subjects.
- (iii)
- A functional activity or action is identified by a functional state name and represents a local action to be executed.
- (iv)
- A send activity corresponds to a named send state and represents a communication action concerned with sending a message.
- (v)
- A receive activity corresponds to a named receive state and represents a communication action concerned with receiving a message.
4. Capturing CPS Behavior
4.1. CPS Components as Self-Contained Subjects
- -
- Modeling starts out as the relevant goals determine the specifications of the subjects—they encapsulate goal-oriented behavior.
- -
- According to the goal that leads to its identification, a subject encapsulates the behavior that enables to achieve that goal. In this way, purposefulness is implemented.
- -
- Since a subject contains encapsulated behavior, it also is able to pursue a specific goal independently from other subjects—it has controlled autonomy.
- -
- Each subject interfaces its environment namely in terms of sending and receiving messages carrying data to be processed. As such, a subject is not only situated in that environment but also context-aware, since, through exchanging information with another subject, relevant context information is delivered to other components. By sending messages to other subjects, it influences the environment.
- -
- Due to the bidirectional capabilities active and passive behavior with respect to awareness can be represented, either through requesting information about the behavior of other subjects of the environment (active behavior) or through receiving information on changes of the environment and responding on demand (passive behavior).
4.2. CPS as Networked Multicomponent Architectures
- -
- possible local states a component such as a network node (agent) can be in.
- -
- actions a network node is able to perform.
- -
- a local protocol that allows selecting actions—depending on the current local state of a networked component.
- -
- a local evolution function. It captures the logic how a networked component evolves from one local state to another. This step depends on the component’s own action and the actions set by other ones, set out by communication.
- -
- A set of agents (part of the user-defined model)
- -
- A set of agent relationships (part of the user-defined model)
- -
- A framework for simulating agent behaviors and interactions
- -
- Each subject has its individual intelligent behavior, represented by state transitions triggered by inputs and dedicated decision rules.
- -
- The interaction among subjects is not disturbed by any supervising authority. It is driven by individual subjects sending and receiving messages. Hence, the overall CPS corresponds to choreographed self-contained units (subjects).
5. Choreographic Intelligence Deployment
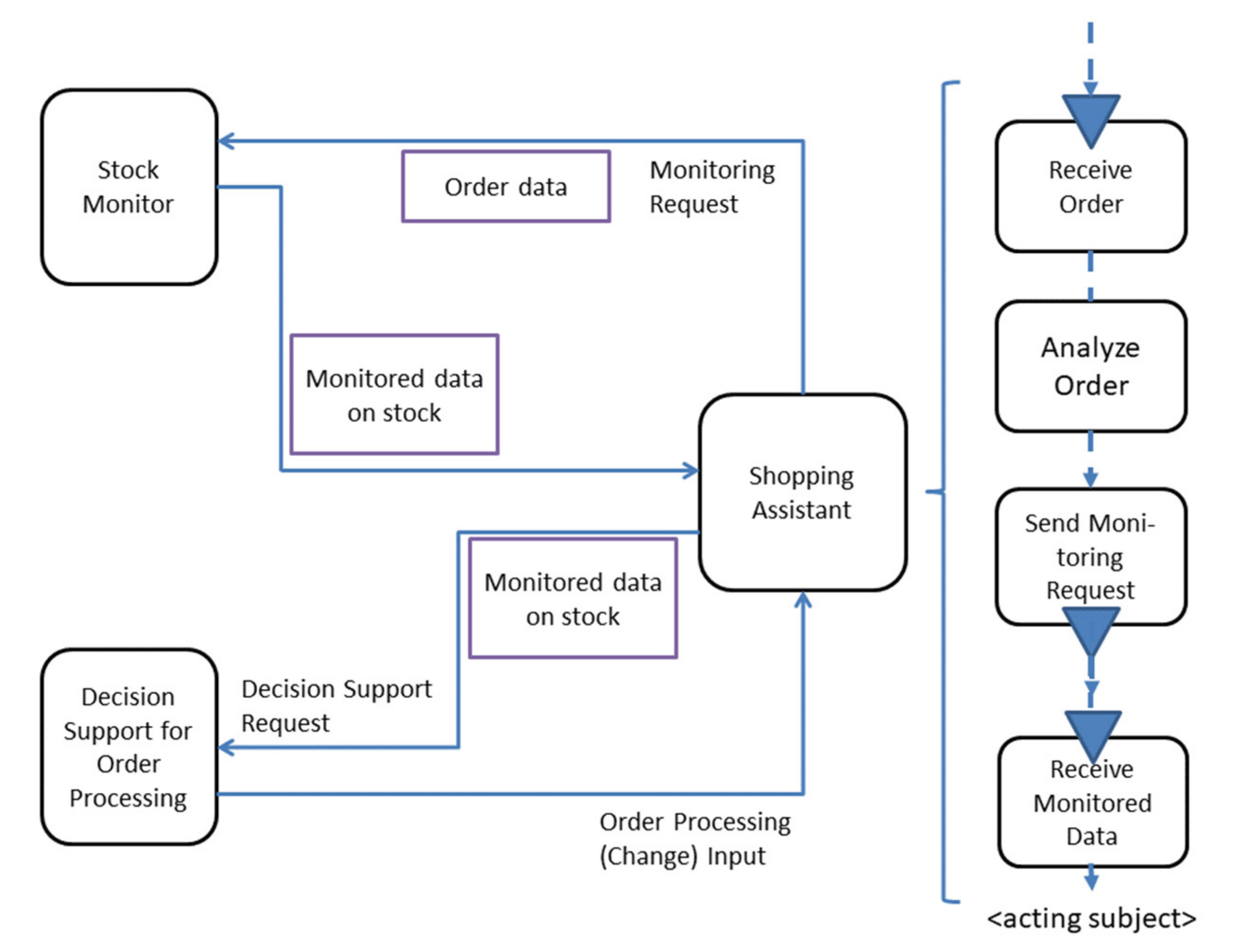
- <acting subject>: This type of component is a subject is acting to accomplish a specific decision-making task, e.g., to complete order handling.
- Monitoring: This type of component is capable to receive and process requests to collect data on the current situation through its message passing connections. It is also able to automatically and push information based on received and processed data from its environment to support the <acting subject>.
- Decision Support: It supports selecting the next action and is consulted by an <acting subject> in a certain state. It is provided with all available information on a certain situation through this subject, which is coupled to monitoring.
6. Discussion and Conclusions
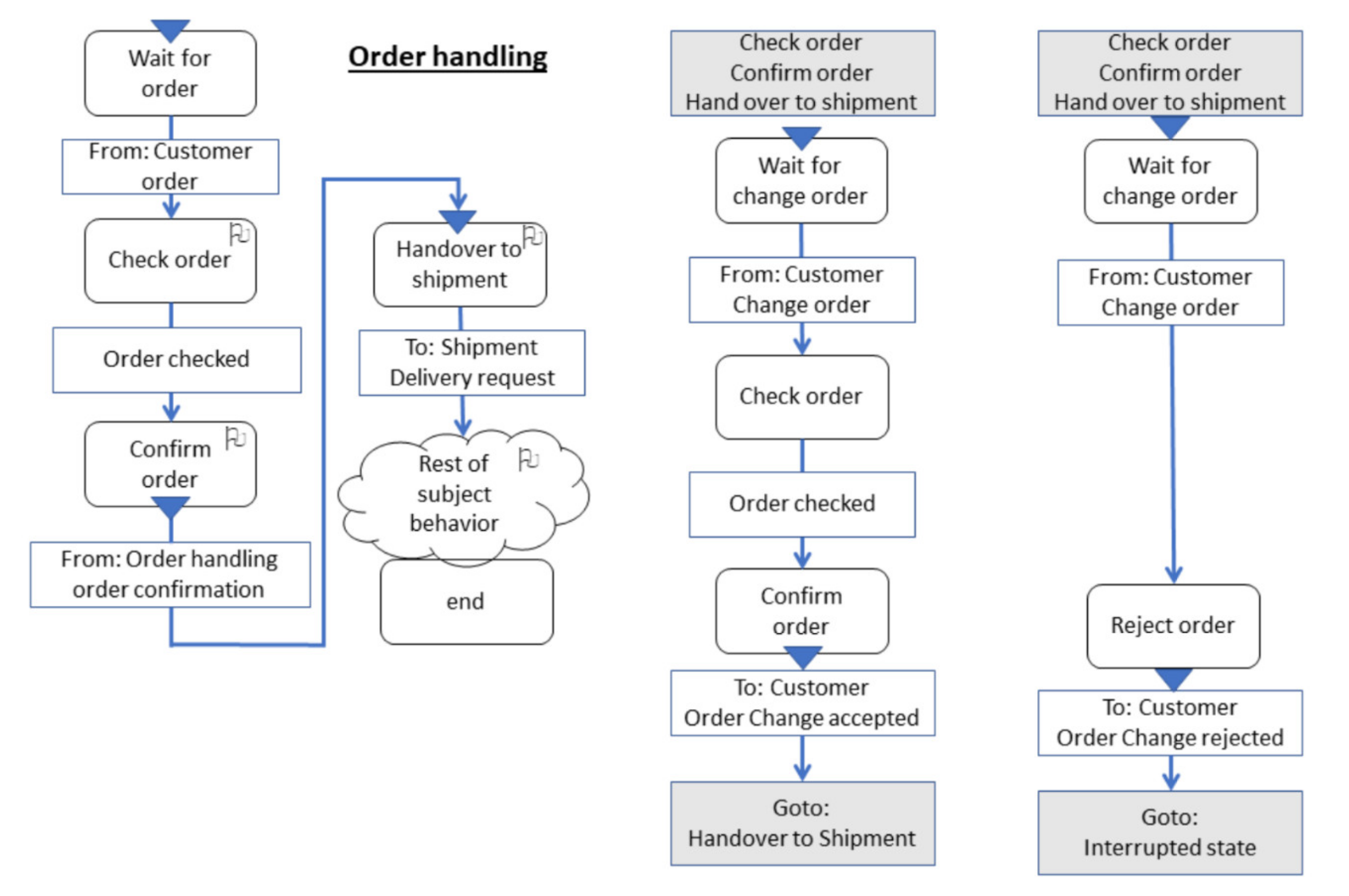
- active and reactive activities.
- nonroutine behaviors based on events.
- structured integration of business rules.
- decision-making patterns.
- monitoring for informed decision support.
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Derler, P.; Lee, E.A.; Tripakis, S.; Törngren, M. Cyber-physical system design contracts. In Proceedings of the ACM/IEEE 4th International Conference on Cyber-Physical Systems, Philadelphia, PA, USA, 8–11 April 2013; pp. 109–118. [Google Scholar]
- Hehenberger, P.; Vogel-Heuser, B.; Bradley, D.; Eynard, B.; Tomiyama, T.; Achiche, S. Design, modelling, simulation and integration of cyber physical systems: Methods and applications. Comput. Ind. 2016, 82, 273–289. [Google Scholar] [CrossRef]
- Khaitan, S.K.; McCalley, J.D. Design techniques and applications of cyberphysical systems: A survey. IEEE Syst. J. 2014, 9, 350–365. [Google Scholar] [CrossRef]
- Merlo, C.; Abi Akle, A.; Llaria, A.; Terrasson, G.; Villeneuve, E.; Pilniere, V. Proposal of a user-centred approach for CPS design: Pillbox case study. IFAC PapersOnLine 2019, 51, 196–201. [Google Scholar] [CrossRef]
- Weiss, G. (Ed.) Multi-Agent Systems; MIT Press: Cambridge, MA, USA, 2013. [Google Scholar]
- Sterling, L.; Taveter, K. The Art of Agent-Oriented Modeling; MIT Press: Cambridge, MA, USA, 2009. [Google Scholar]
- Wooldridge, M. Intelligent Agents. In Multi-Agent Systems, 2nd ed.; Weiss, G., Ed.; MIT Press: Cambridge, MA, USA, 2013; pp. 1–50. [Google Scholar]
- North, M.J.; Macal, C.M. Managing Business Complexity: Discovering Strategic Solutions with Agent-Based Modeling and Simulation; Oxford University Press: Oxford, UK, 2007. [Google Scholar]
- Fleischmann, A.; Schmidt, W.; Stary, C.; Obermeier, S.; Börger, E. Subject-Oriented Business Process Management; Springer: Berlin, Germany, 2012. [Google Scholar]
- Weske, M. Business Process Management: Concepts, Languages, Architectures; Springer: Berlin, Germany, 2012. [Google Scholar]
- Wagner, R.; Schleich, B.; Haefner, B.; Kuhnle, A.; Wartzack, S.; Lanza, G. Challenges and potentials of digital twins and Industry 4.0 in product design and production for high performance products. Procedia CIRP 2019, 84, 88–93. [Google Scholar] [CrossRef]
- Papacharalampopoulos, A.; Stavropoulos, P.; Petrides, D. Towards a digital twin for manufacturing processes: Applicability on laser welding. Procedia CIRP 2020, 88, 110–115. [Google Scholar] [CrossRef]
- Liu, C.; Jiang, P.; Jiang, W. Web-based digital twin modeling and remote control of cyber-physical production systems. Robot. Comput. Integr. Manuf. 2020, 64, 101956. [Google Scholar] [CrossRef]
- Lu, Y.; Liu, C.; Kevin, I.; Wang, K.; Huang, H.; Xu, X. Digital Twin-driven smart manufacturing: Connotation, reference model, applications and research issues. Robot. Comput. Integr. Manuf. 2020, 61, 101837. [Google Scholar] [CrossRef]
- Murray, K.B.; Häubl, G. Personalization without interrogation: Towards more effective interactions between consumers and feature-based recommendation agents. J. Interact. Mark. 2009, 23, 38–146. [Google Scholar] [CrossRef]
- Davis, R. Business Process Modelling with ARIS: A Practical Guide; Springer: Berlin, Germany, 2001. [Google Scholar]
- Wooldridge, M.; Jennings, N.R.; Kinny, D. The Gaia methodology for agent-oriented analysis and design. Auton. Agents Multi Agent Syst. 2000, 3, 285–312. [Google Scholar] [CrossRef]
- Nealon, J.L.; Moreno, A. Agent-based applications in health care. In Applications of Software Agent Technology in the Health Care Domain; Nealon, J., Moreno, A., Eds.; Birkhäuser: Basel, Switzerland, 2003; pp. 3–18. [Google Scholar]
- Stratulat, T.; Ferber, J.; Tranier, J. MASQ: Towards an integral approach to interaction. In Proceedings of the 8th International Conference on Autonomous Agents and Multiagent Systems (AAMAS 2009), Budapest, Hungary, 10–15 May 2009; pp. 813–820. [Google Scholar]
- Cohen, M.; Dam, M.; Lomuscio, A.; Russo, F. Abstraction in model checking multi-agent systems. In Proceedings of the 8th International Conference on Autonomous Agents and Multiagent Systems (AAMAS 2009), Budapest, Hungary, 10–15 May 2009; Decker, S., Sierra, C., Eds.; International Foundation for Autonomous Agents and Multiagent Systems: Richland, SC, USA, 2009. Available online: https://www.researchgate.net/publication/221454186_Abstraction_in_model_checking_multi-agent_systems (accessed on 4 February 2021).
- Heath, B.; Hill, R.; Ciarallo, F. A survey of agent-based modeling practices (January 1998–July 2008). J. Artif. Soc. Soc. Simul. 2009, 12, 9–43. [Google Scholar]
- Cheng, B.H.C.; De Lemos, R.; Giese, H.; Inverardi, P.; Magee, J. (Eds.) Software Engineering for Self-Adaptive Systems; LNCS 5525; Springer: Berlin, Germany, 2009. [Google Scholar]
- Seghrouchni, A.E.F.; Dix, J.; Dastani, M.; Bordini, R.H. (Eds.) Multi-Agent Programming. Languages, Tools and Applications; Springer: Heidelberg, Germany, 2009. [Google Scholar]
- Hahn, C.; Madrigal-Mora, C.; Fischer, K. A platform-independent metamodel for multiagent systems. Auton. Agents Multi Agent Syst. 2009, 18, 239–266. [Google Scholar] [CrossRef]
- Fagin, R.; Halpern, J.Y.; Vardi, M.Y.; Moses, Y. Reasoning about Knowledge; MIT Press: Cambridge, MA, USA, 1995. [Google Scholar]
- Raimondi, F.; Lomuscio, A. Automatic verification of multi-agent systems by model checking via ordered binary decision diagrams. J. Appl. Logic 2007, 5, 235–251. [Google Scholar] [CrossRef][Green Version]
- Gero, J.S.; Fujii, H. A computational framework for concept formation for a situated design agent. Knowl. Based Syst. 2000, 13, 361–368. [Google Scholar] [CrossRef]
- Gero, J.S.; Kannengiesser, U. The Situated-Function-Behaviour-Structure framework. In Artificial Intelligence in Design’02; Gero, J.S., Ed.; Kluwer: Dordrecht, The Netherlands, 2002; pp. 89–104. [Google Scholar]
- Gero, J.S.; Kannengiesser, U. Function-Behaviour-Structure: A Model for social situated agents. In Proceedings of the Workshop on Cognitive Modeling of Agents and Multi-Agent Interactions, International Joint Conference on Artificial Intelligence, IJCAI, Acapulco, Mexico, 9–15 August 2003; pp. 101–107. [Google Scholar]
- Uhlemann, T.H.J.; Lehmann, C.; Steinhilper, R. The digital twin: Realizing the cyber-physical production system for industry 4.0. Procedia CIRP 2017, 61, 335–340. [Google Scholar] [CrossRef]
- Telukdarie, A.; Sishi, M.N. Enterprise Definition for Industry 4.0. In Proceedings of the 2018 IEEE International Conference on Industrial Engineering and Engineering Management (IEEM), Bangkok, Thailand, 16–19 December 2018; pp. 849–853. [Google Scholar]
- Moisescu, M.A.; Sacala, I.S.; Dumitrache, I.; Caramihai, S.I.; Barbulescu, B.; Danciuc, M. A cyber-physical systems approach to cognitive enterprise. Period. Eng. Nat. Sci. 2019, 7, 337–342. [Google Scholar] [CrossRef]
- Riss, U.V.; Maus, H.; Javaid, S.; Jilek, C. Digital Twins of an Organization for Enterprise Modeling, Proceedings of the IFIP Working Conference on the Practice of Enterprise Modeling, Riga, Latvia, 25–27 November 2020; Springer: Cham, Switzerland, 2020; pp. 25–40. [Google Scholar]
- Zhou, J.; Li, P.; Zhou, Y.; Wang, B.; Zang, J.; Meng, L. Toward New-Generation Intelligent Manufacturing. Engineering 2018, 4, 11–20. [Google Scholar] [CrossRef]
- Ullah, A.M.M. Fundamental Issues of Concept Mapping Relevant to Discipline-Based Education: A Perspective of Manufacturing Engineering. Educ. Sci. 2019, 9, 228. [Google Scholar] [CrossRef]
- Venkatakumar, H.; Schmidt, W. Subject-oriented specification of IoT scenarios. In Proceedings of the 11th International Conference on Subject-Oriented Business Process Management, ACM, Seville, Spain, 26–28 June 2019; pp. 29–40. [Google Scholar]
- Weichhart, G.; Reiser, M.; Stary, C. Task-Based Design of Cyber-Physical Systems–Meeting Representational Requirements with S-BPM, Proceedings of the International Conference on Subject-Oriented Business Process Management, Bremen, Germany, 2–4 December 2020; Springer: Cham, Switzerland, 2020; pp. 63–73. [Google Scholar]
- Quintal, C.; Macías, J.A. Measuring and improving the quality of development processes based on usability and accessibility. Univers. Access Inf. Soc. 2020. [Google Scholar] [CrossRef]
- Fleischmann, A. Limitations of Choreography Specifications with BPMN, Proceedings of the International Conference on Subject-Oriented Business Process Management, Bremen, Germany, 2–4 December 2020; Springer: Cham, Switzerland, 2020; pp. 203–216. [Google Scholar]
- Aheleroff, S.; Xu, X.; Zhong, R.Y.; Lu, Y. Digital Twin as a Service (DTaaS) in Industry 4.0: An Architecture Reference Model. Adv. Eng. Inform. 2020, 47, 101225. [Google Scholar] [CrossRef]
- Ghosh, A.K.; AMM, S.U.; Kubo, A. Hidden Markov model-based digital twin construction for futuristic manufacturing systems. Artif. Intell. Eng. Des. Anal. Manuf. 2019, 33, 317–331. [Google Scholar] [CrossRef]
- Neubauer, M.; Stary, C. S-BPM in the Production Industry: A Stakeholder Approach; Springer Nature: Cham, Switzerland, 2017. [Google Scholar]
- Neubauer, M.; Krenn, F.; Majoe, D.; Stary, C. Subject-orientation as design language for integration across organisational control layers. Int. J. Prod. Res. 2017, 55, 3644–3656. [Google Scholar] [CrossRef]
- Kadir, B.A.; Broberg, O. Human-centered design of work systems in the transition to industry 4.0. Appl. Ergon. 2020, 92, 103334. [Google Scholar] [CrossRef] [PubMed]

















Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Stary, C. Digital Twin Generation: Re-Conceptualizing Agent Systems for Behavior-Centered Cyber-Physical System Development. Sensors 2021, 21, 1096. https://doi.org/10.3390/s21041096
Stary C. Digital Twin Generation: Re-Conceptualizing Agent Systems for Behavior-Centered Cyber-Physical System Development. Sensors. 2021; 21(4):1096. https://doi.org/10.3390/s21041096
Chicago/Turabian StyleStary, Christian. 2021. "Digital Twin Generation: Re-Conceptualizing Agent Systems for Behavior-Centered Cyber-Physical System Development" Sensors 21, no. 4: 1096. https://doi.org/10.3390/s21041096
APA StyleStary, C. (2021). Digital Twin Generation: Re-Conceptualizing Agent Systems for Behavior-Centered Cyber-Physical System Development. Sensors, 21(4), 1096. https://doi.org/10.3390/s21041096