
Fluid–Structure Coupling Effects in a Dual U-Tube Coriolis Mass Flow Meter



Abstract
1. Introduction
2. Experiment Methodology
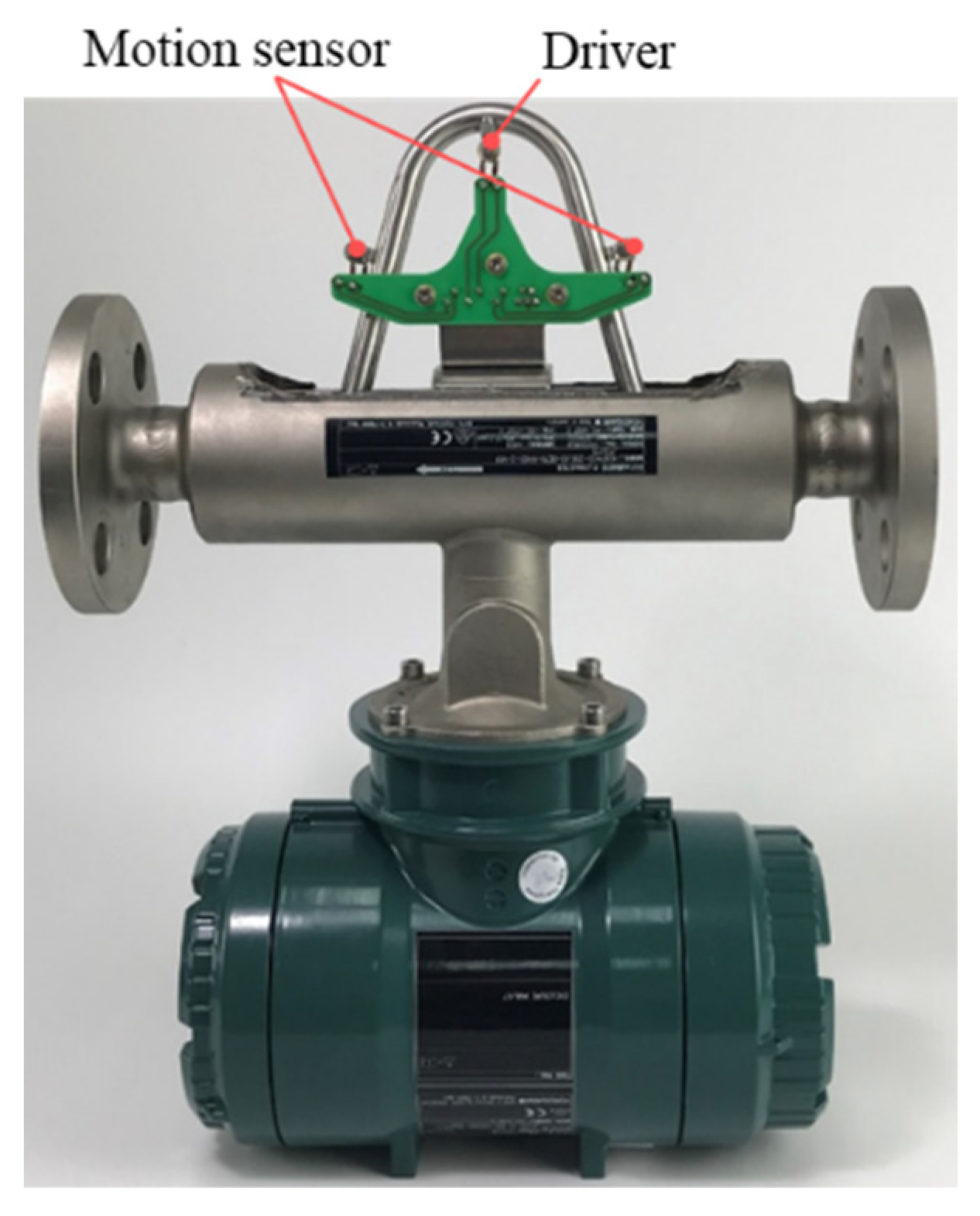
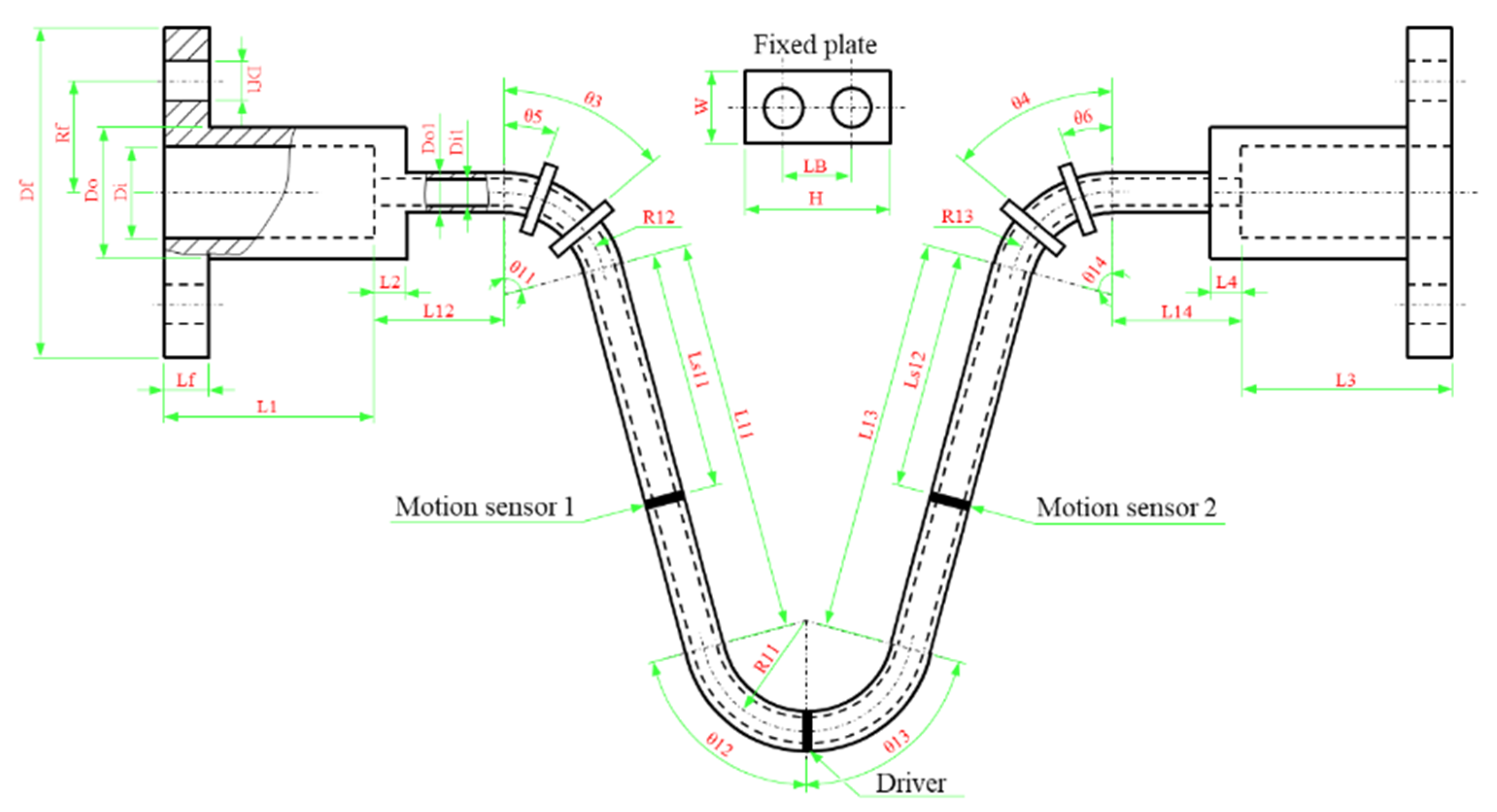
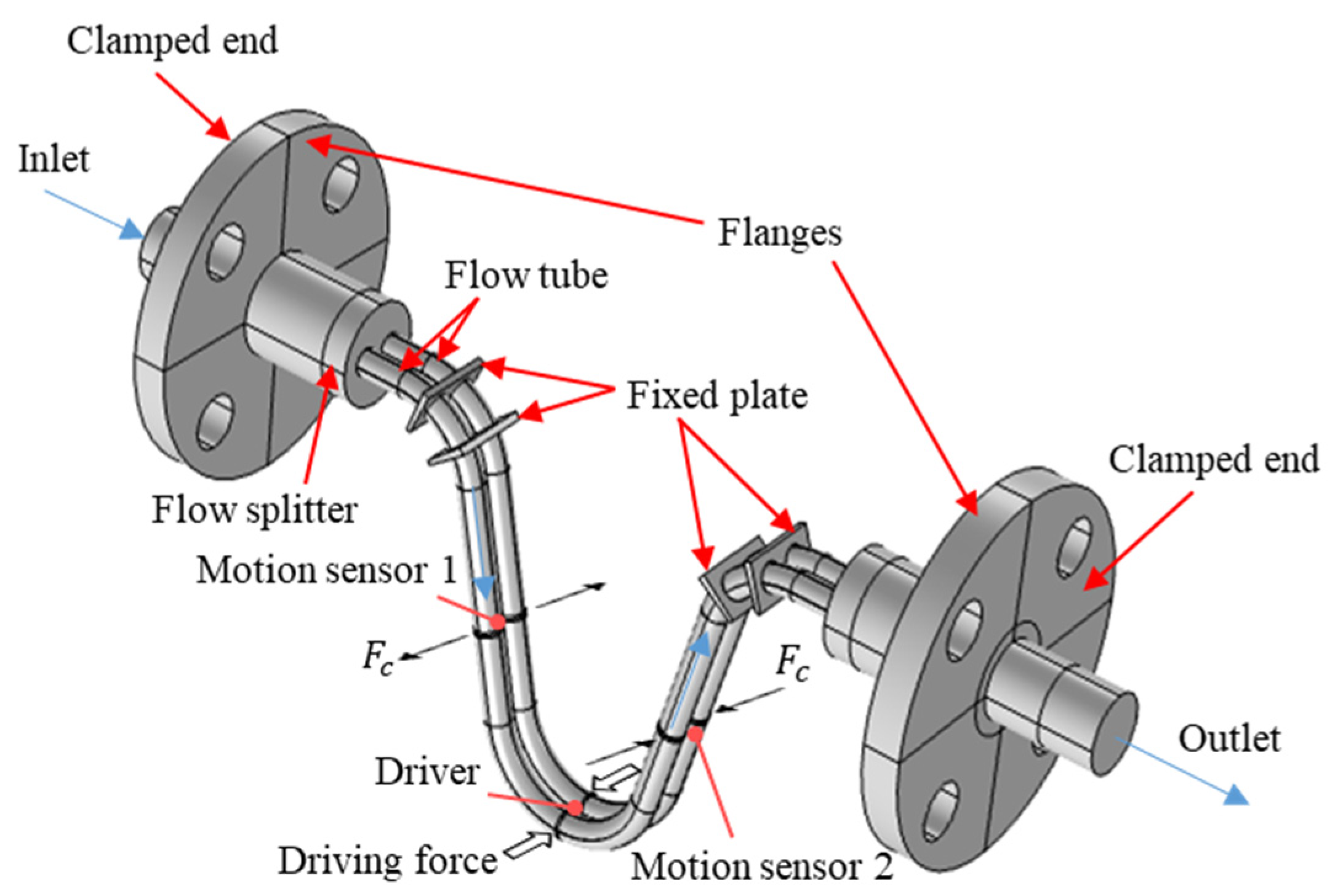
2.1. The Geometry, Motion Sensor and Driver Materials, and Parameterization of the Sample CMF
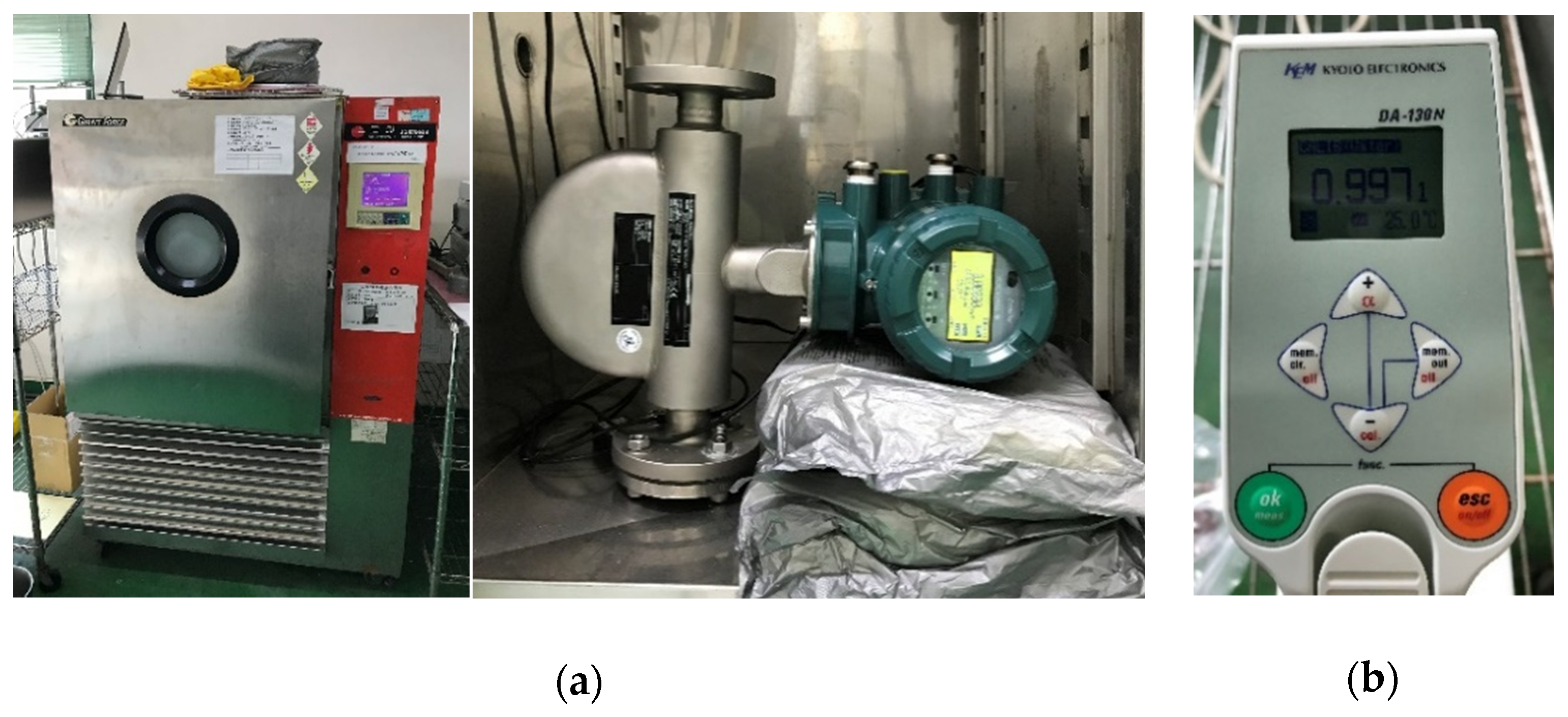
2.2. Experiment for Fluid Density Measurement
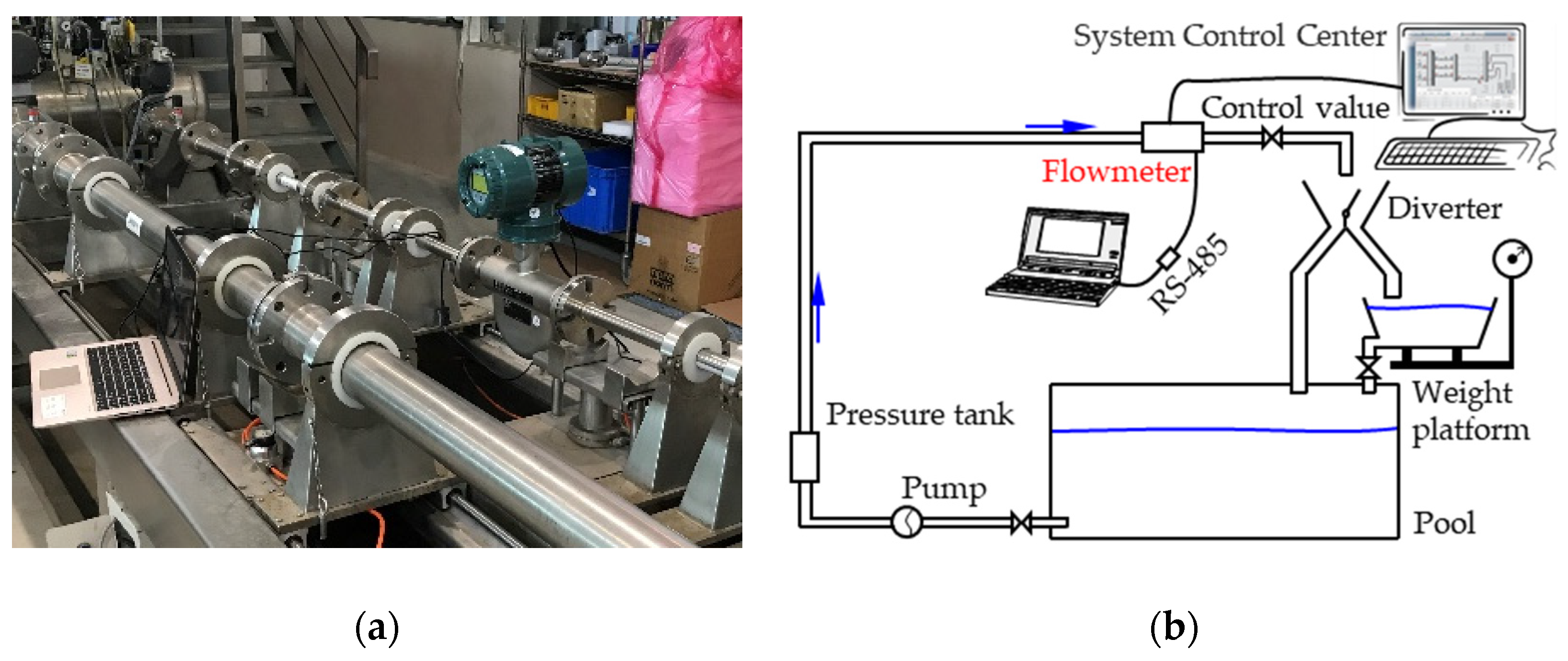
2.3. Experiment for Mass Flow Rate Measurement
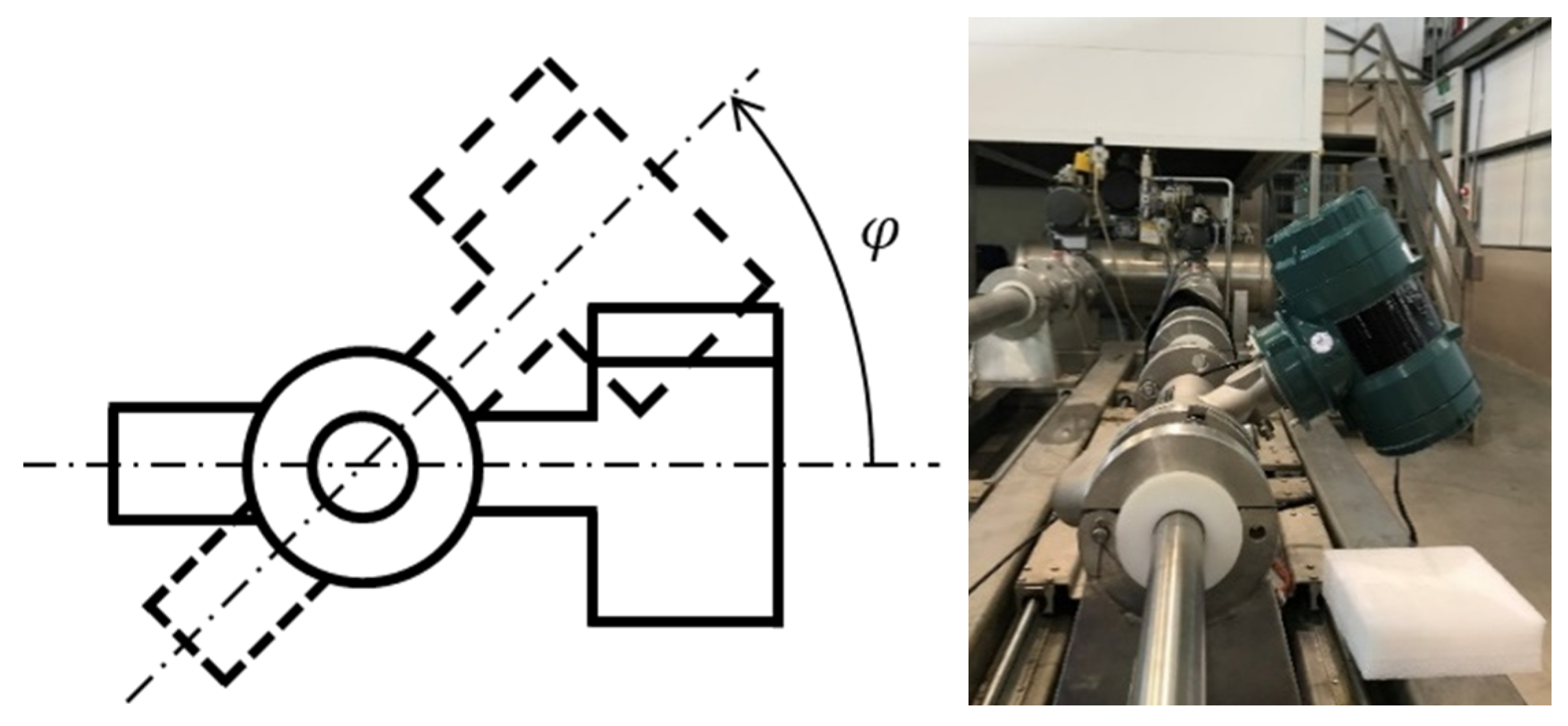
2.4. Experiment for the Influence of Gravity
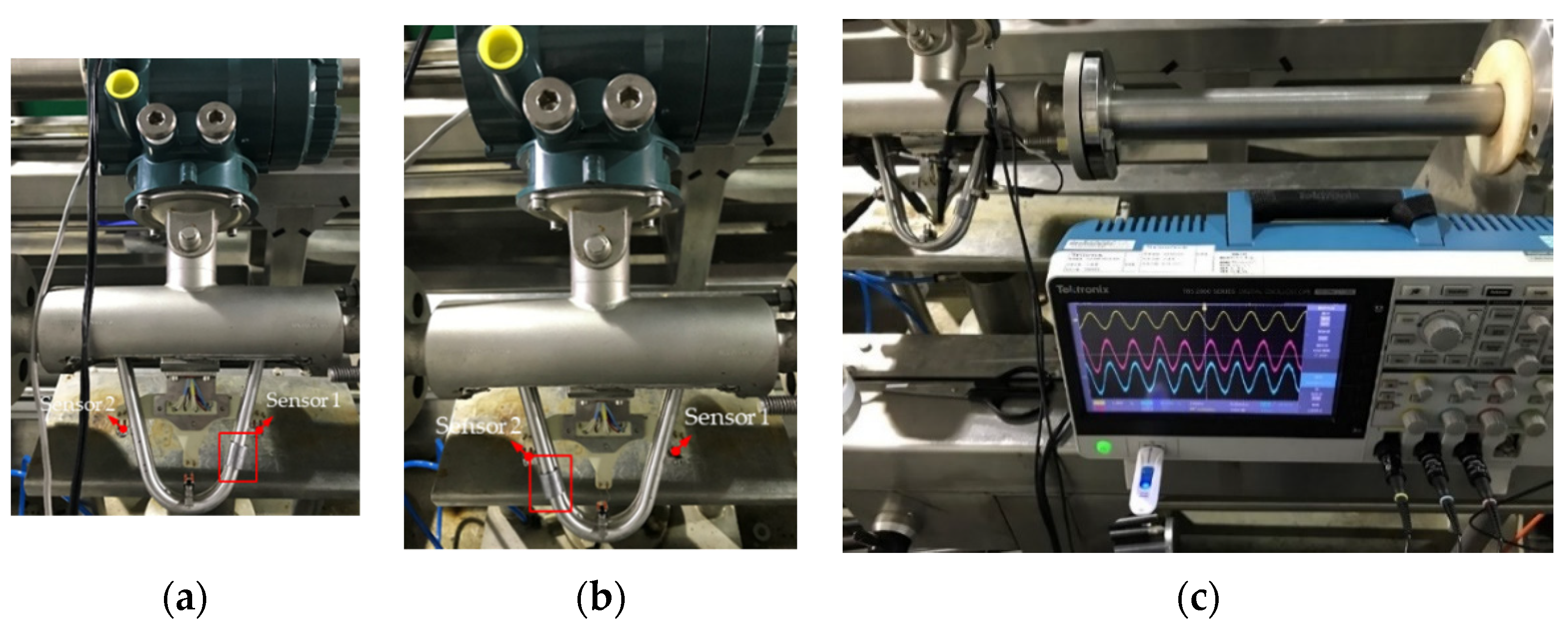
2.5. Experiment for Structural Imbalance
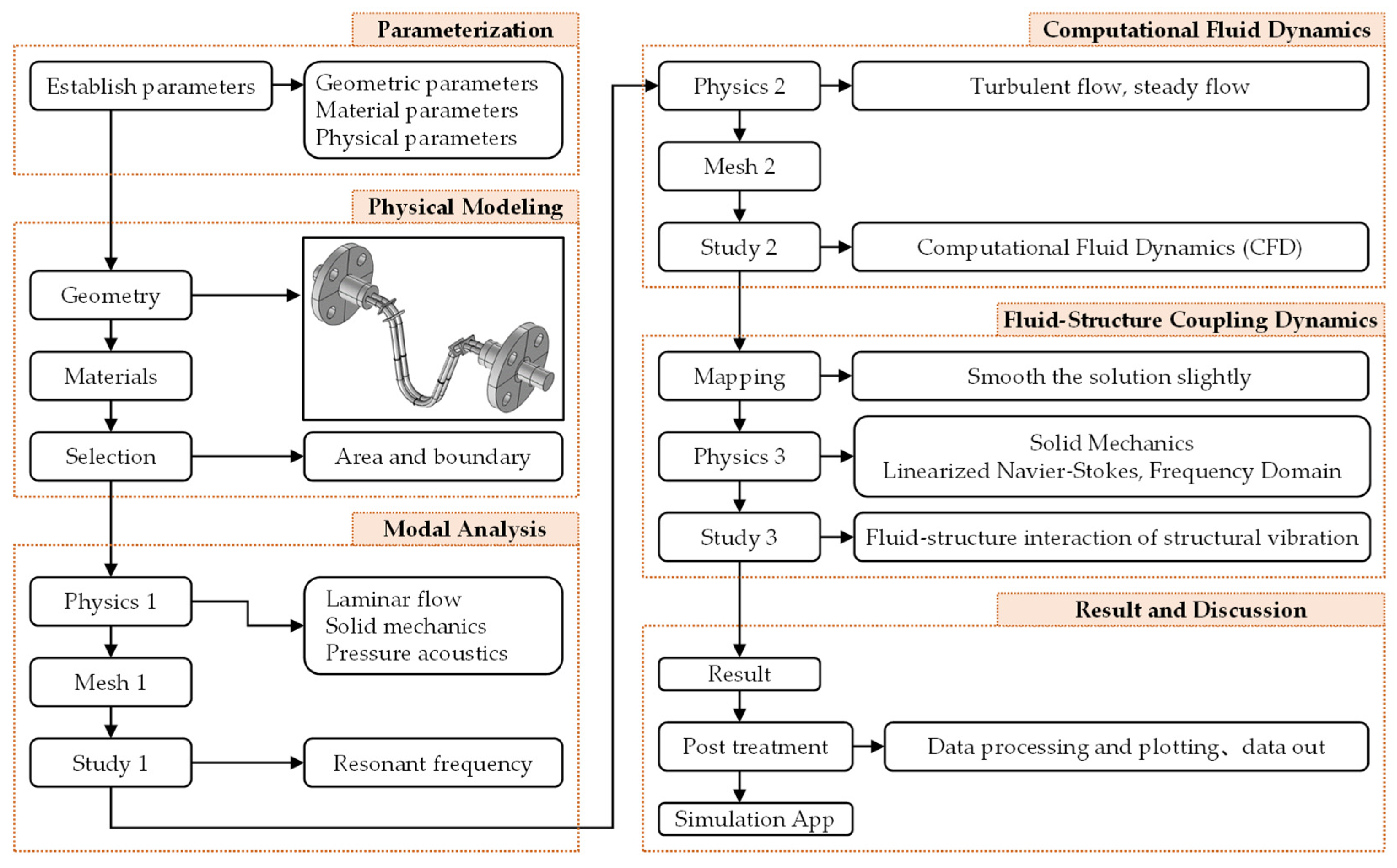
3. Simulation Methodology
3.1. Physical Modeling
3.2. Modal Analysis
3.3. Computational Fluid Dynamics
- The fluid is assumed to be a Newtonian fluid because the fluid in the experiment is water;
- The fluid is assumed to have an incompressible flow because the ratio of flow velocity to sound velocity for the fluid is a Mach number less than 0.3;
- Assume steady-state flow field, namely the velocity field is time-invariant, because all the measurements in the flow experiments are performed after the steady-state is reached;
- The fluid density, ρf, is constant because the experiment is kept in a constant temperature chamber to maintain the liquid’s temperature at 25 °C ± 0.05 °C;
- The influence of gravity can be ignored during simulation.
3.4. Fluid-Structure Coupling Dynamics
4. Results and Discussions
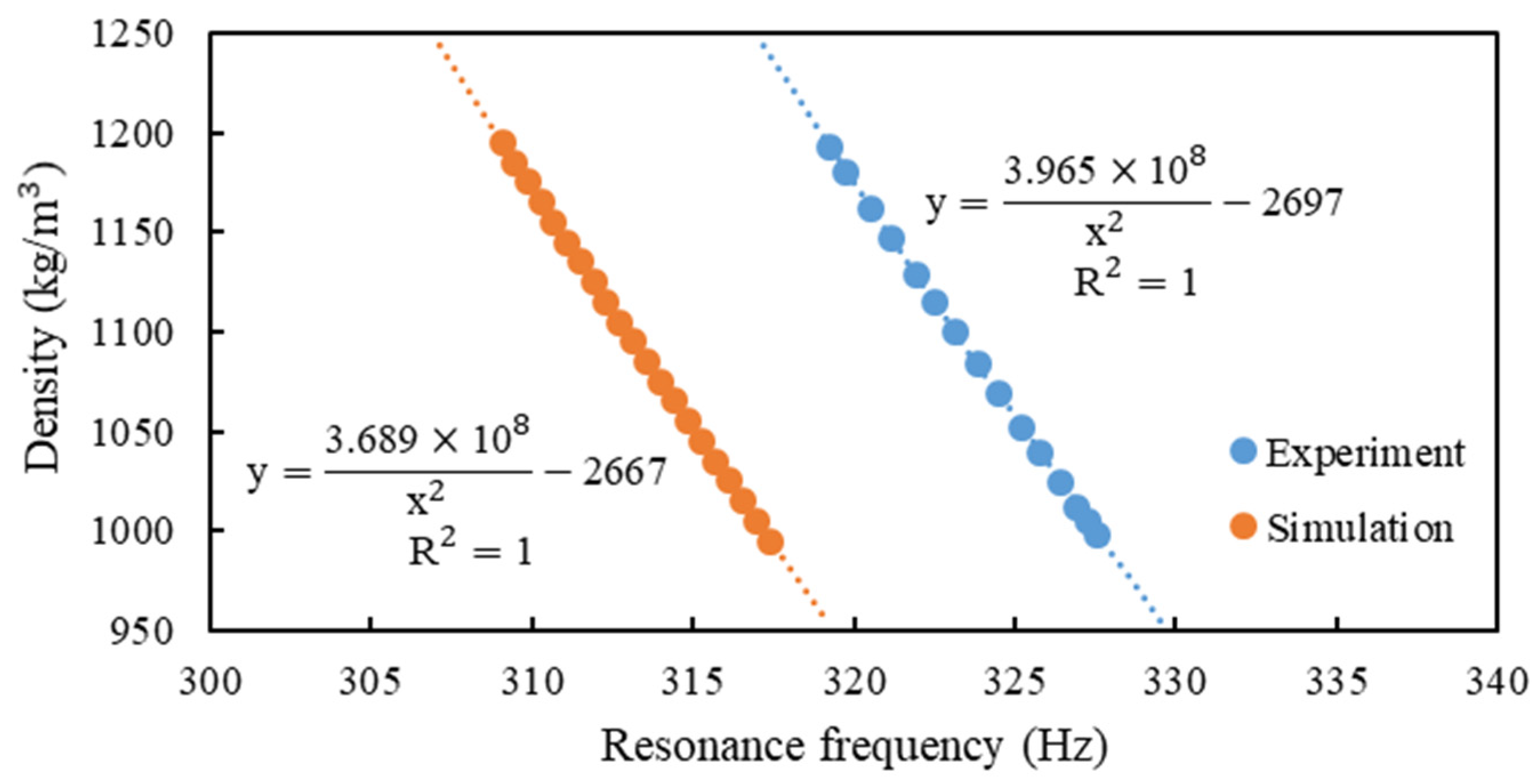
4.1. Resonant Frequency vs. Fluid Density
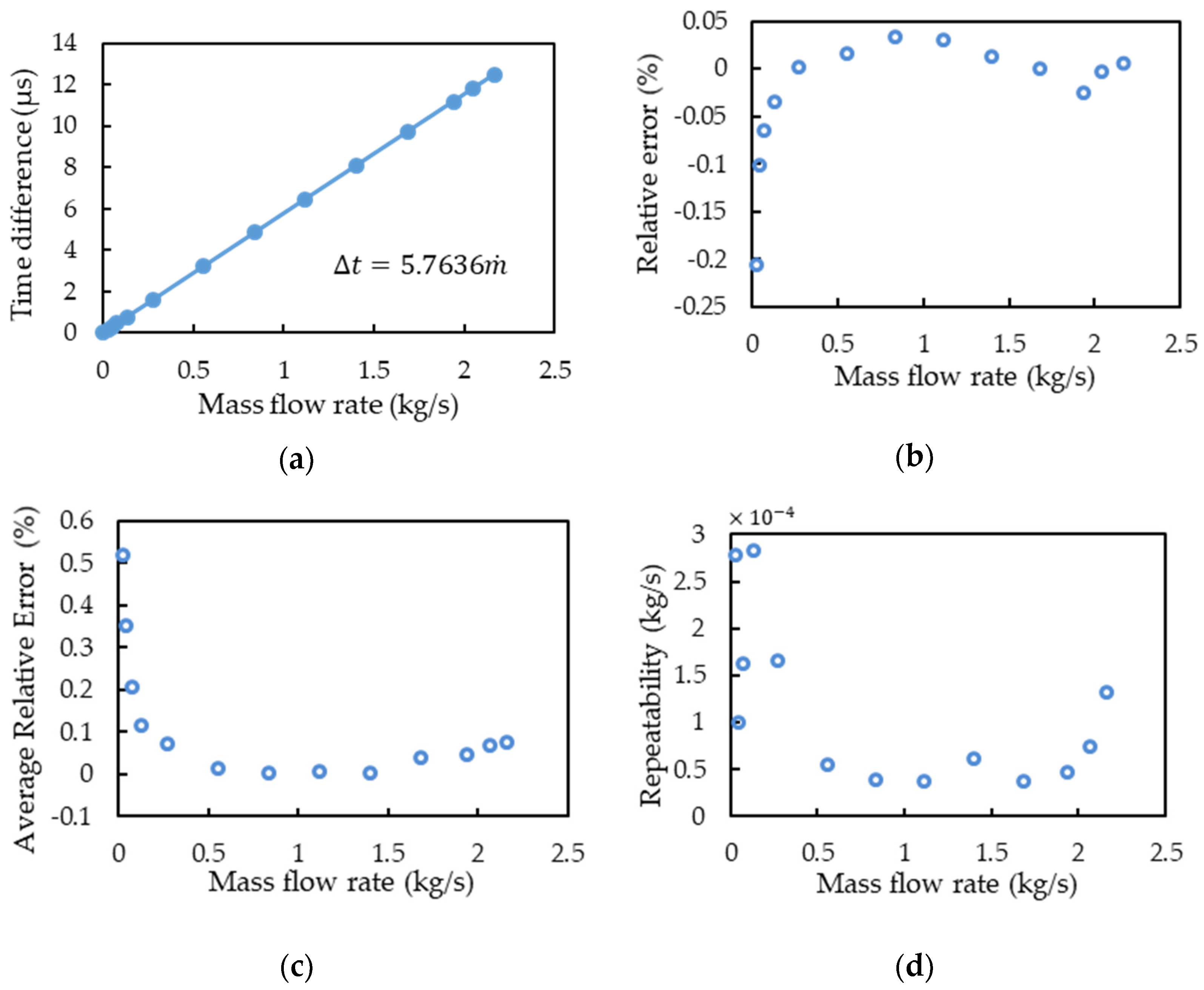
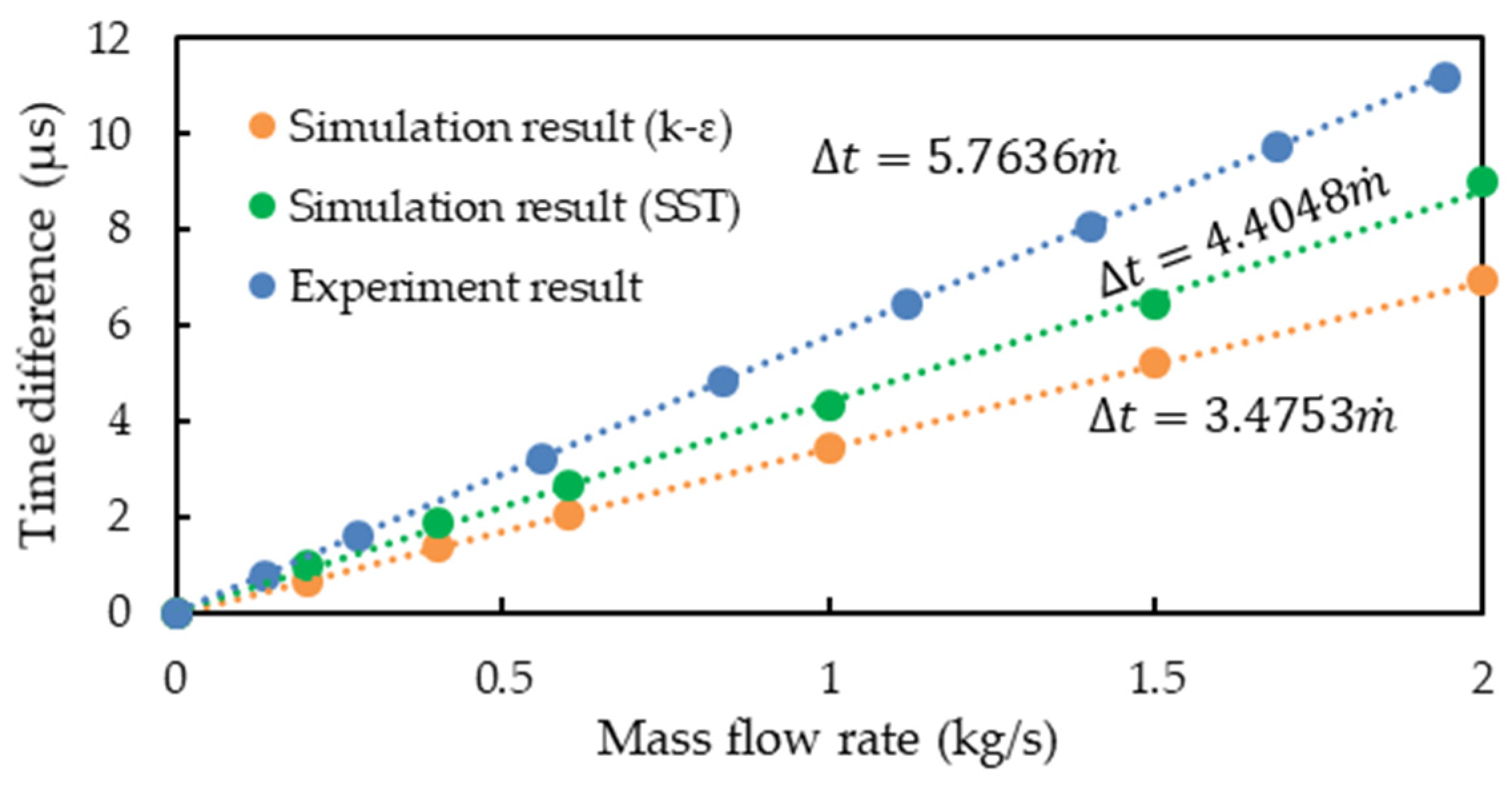
4.2. Signal Time-Difference vs. Mass Flow Rate
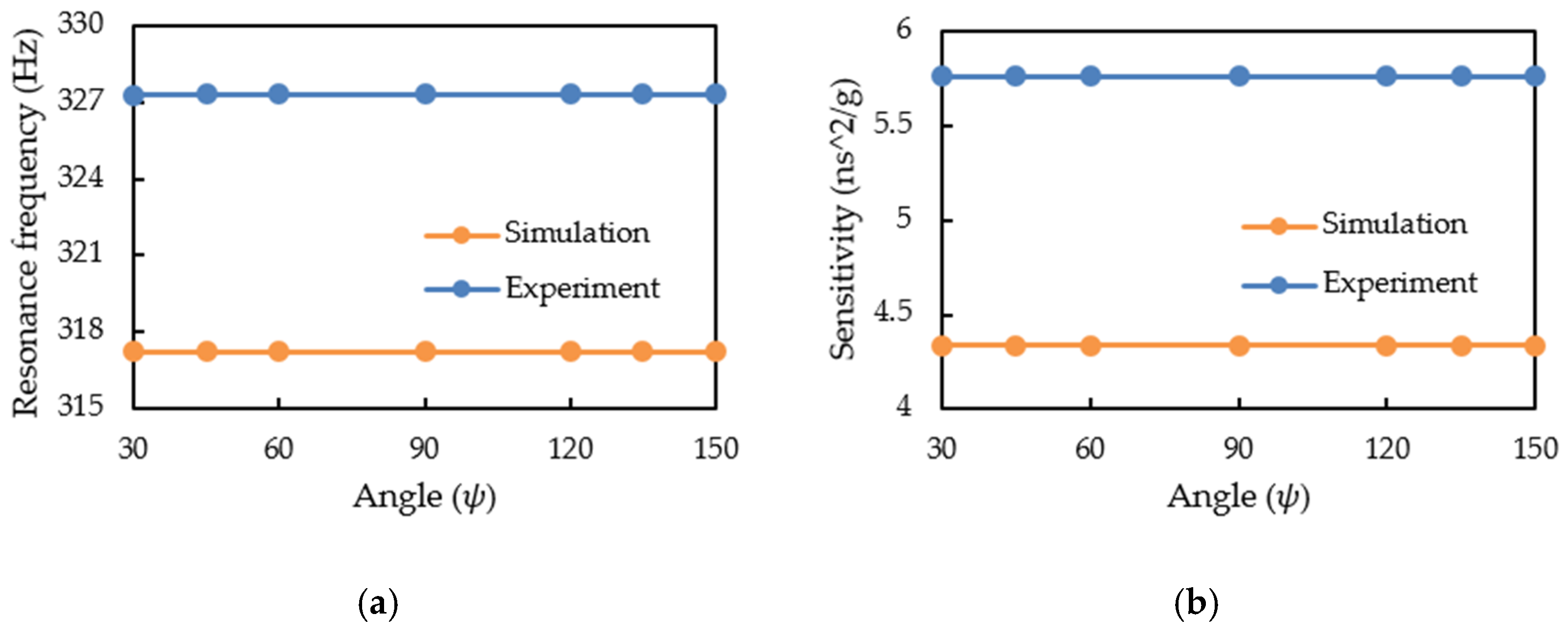
4.3. The Influence of Gravity
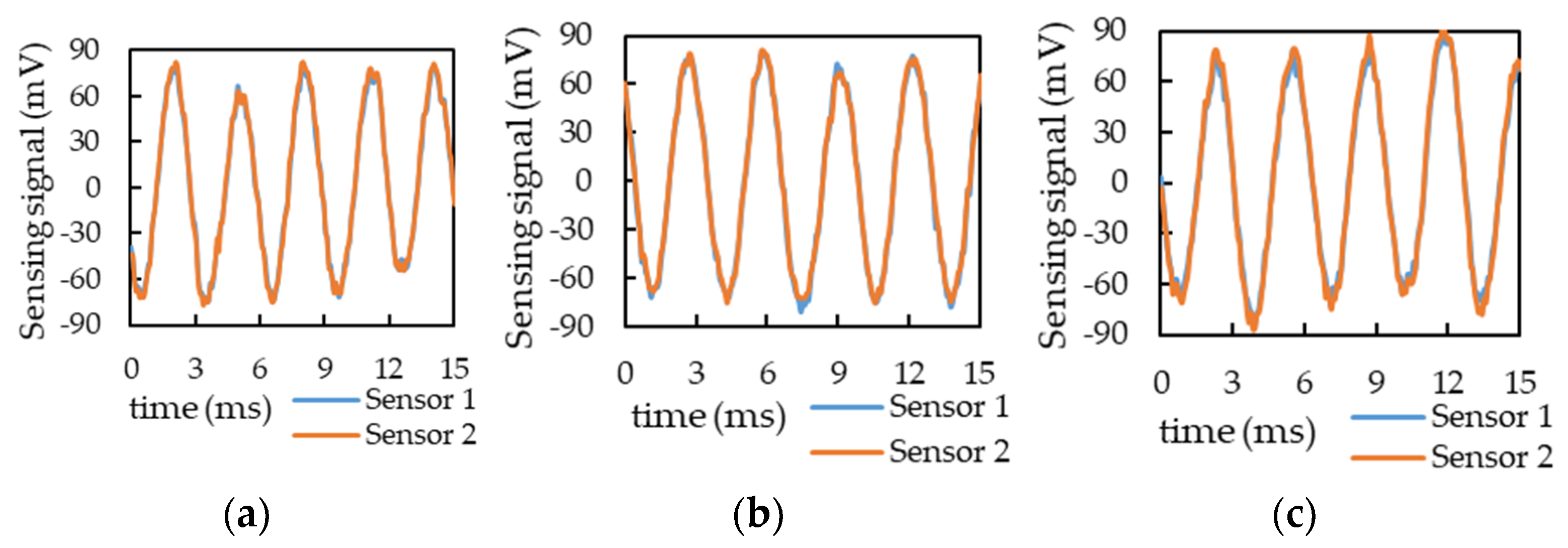
4.4. The Influence of Structural Imbalance
5. Some Other Design Considerations by Simulation
5.1. Fluid Viscosity Estimation Through Pressure Drop
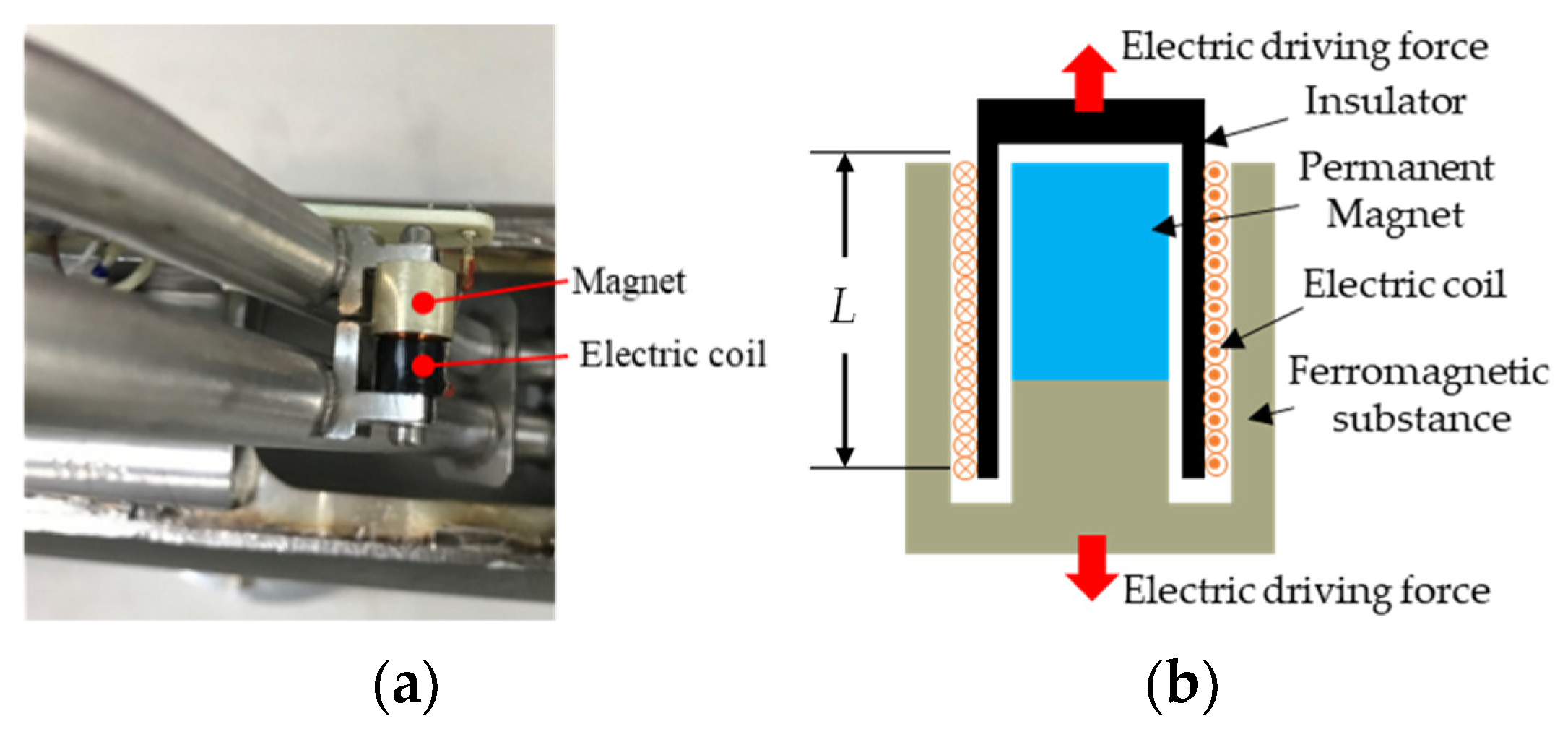
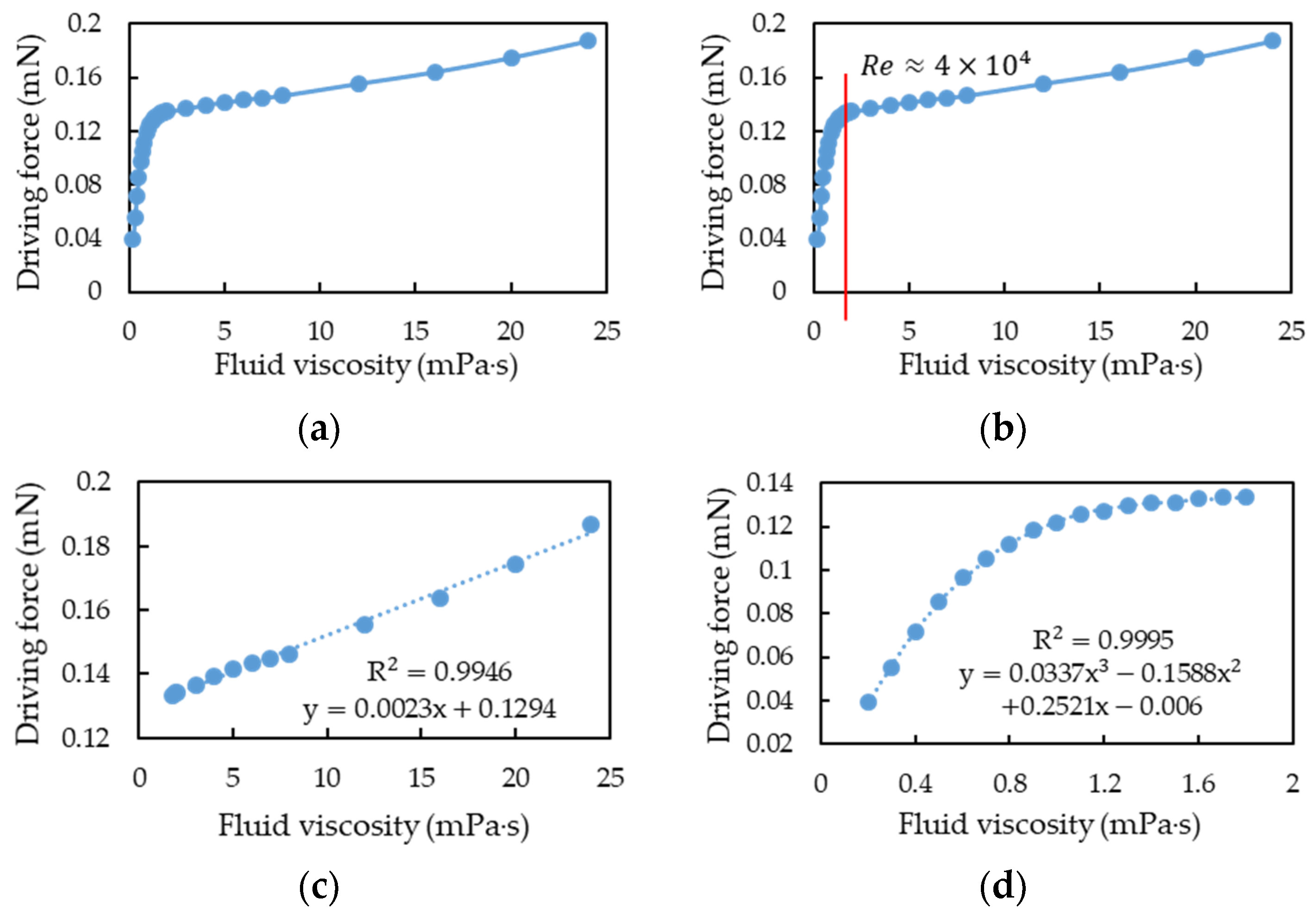
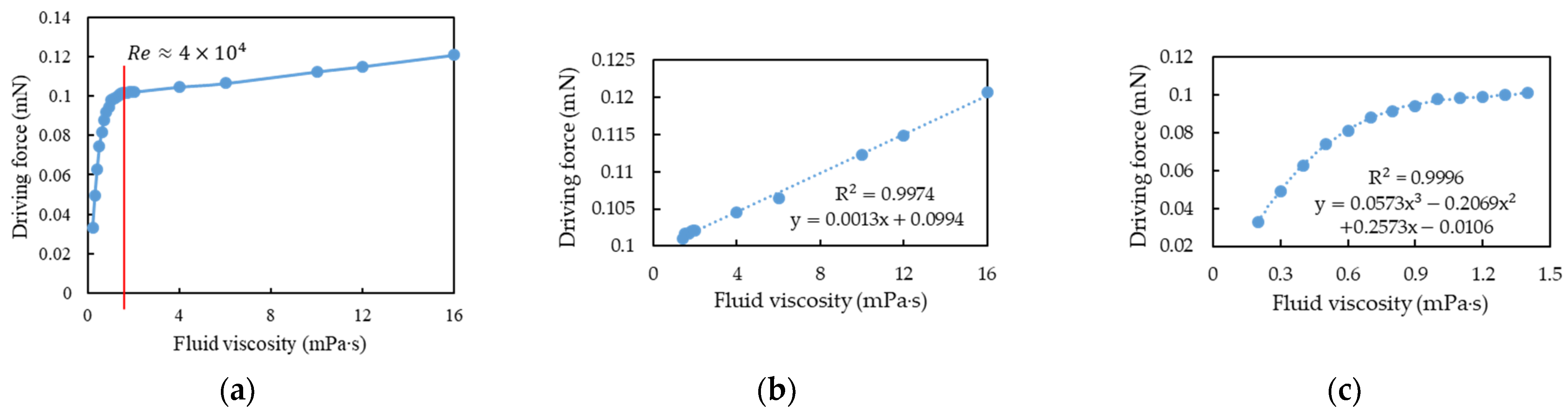
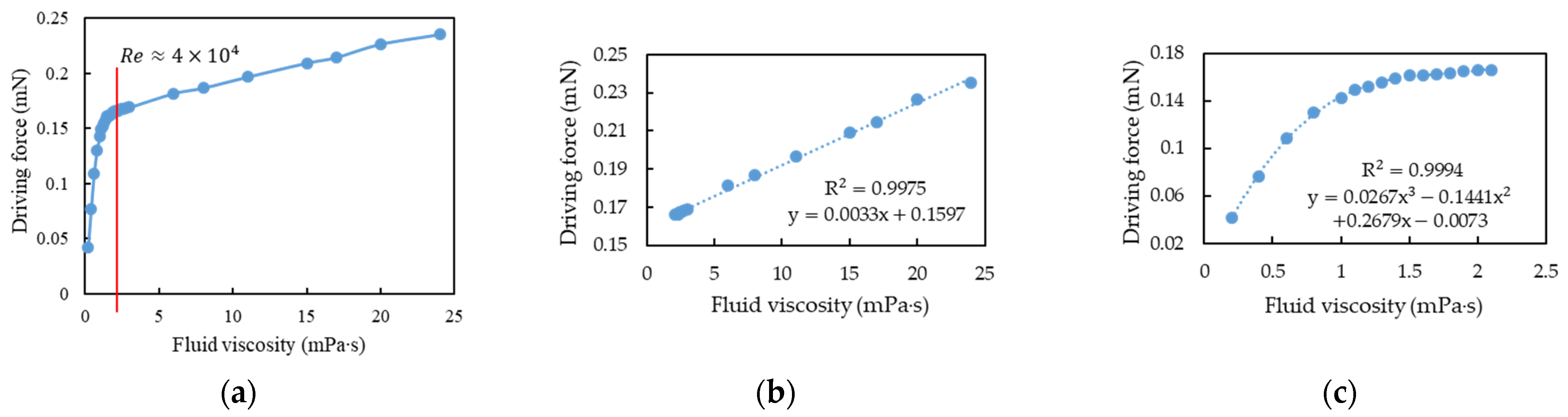
5.2. Fluid Viscosity Estimation Through Driving Current
5.3. Motion Sensor Positions
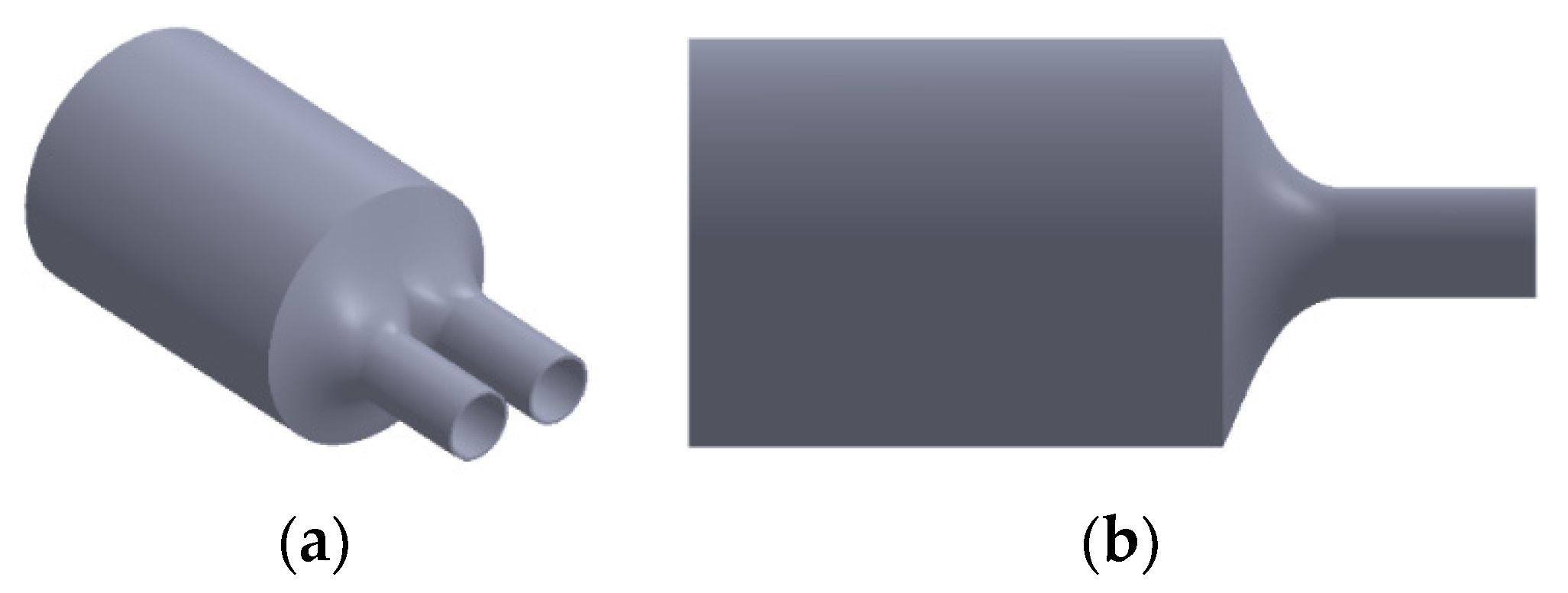
5.4. Flow Splitter Design
6. Conclusions
- The fluid density is inversely proportional to the square of resonant frequency. The deviation of the simulation from the experiment is only 3% and regular. The slight deviation may come from the frequency-dependent dynamic water stiffness and damping and the mass density of the solid-air-water mixture.
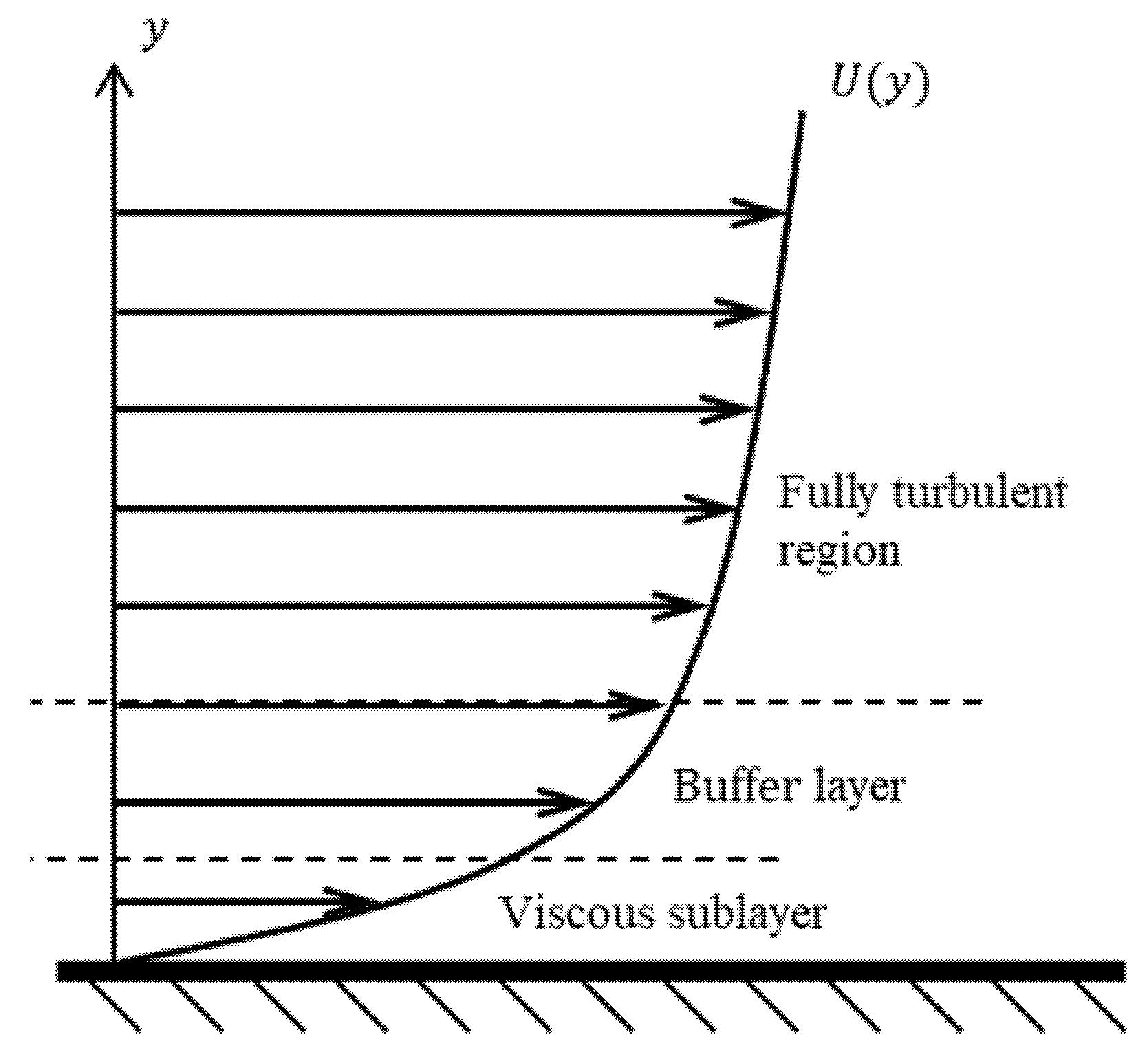
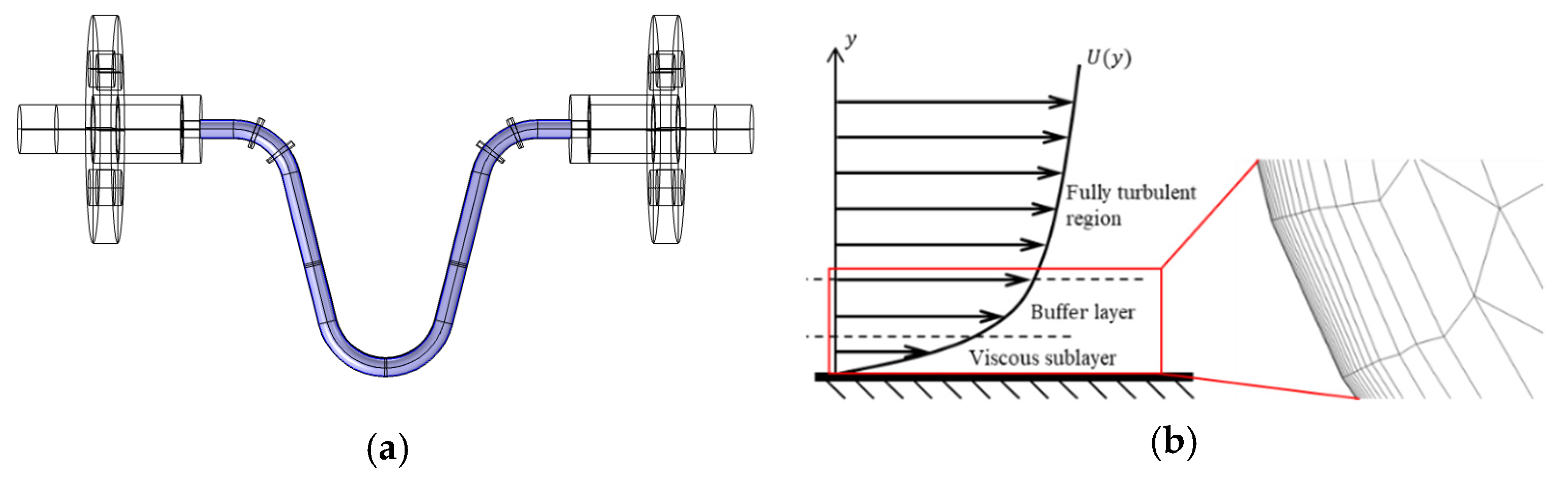
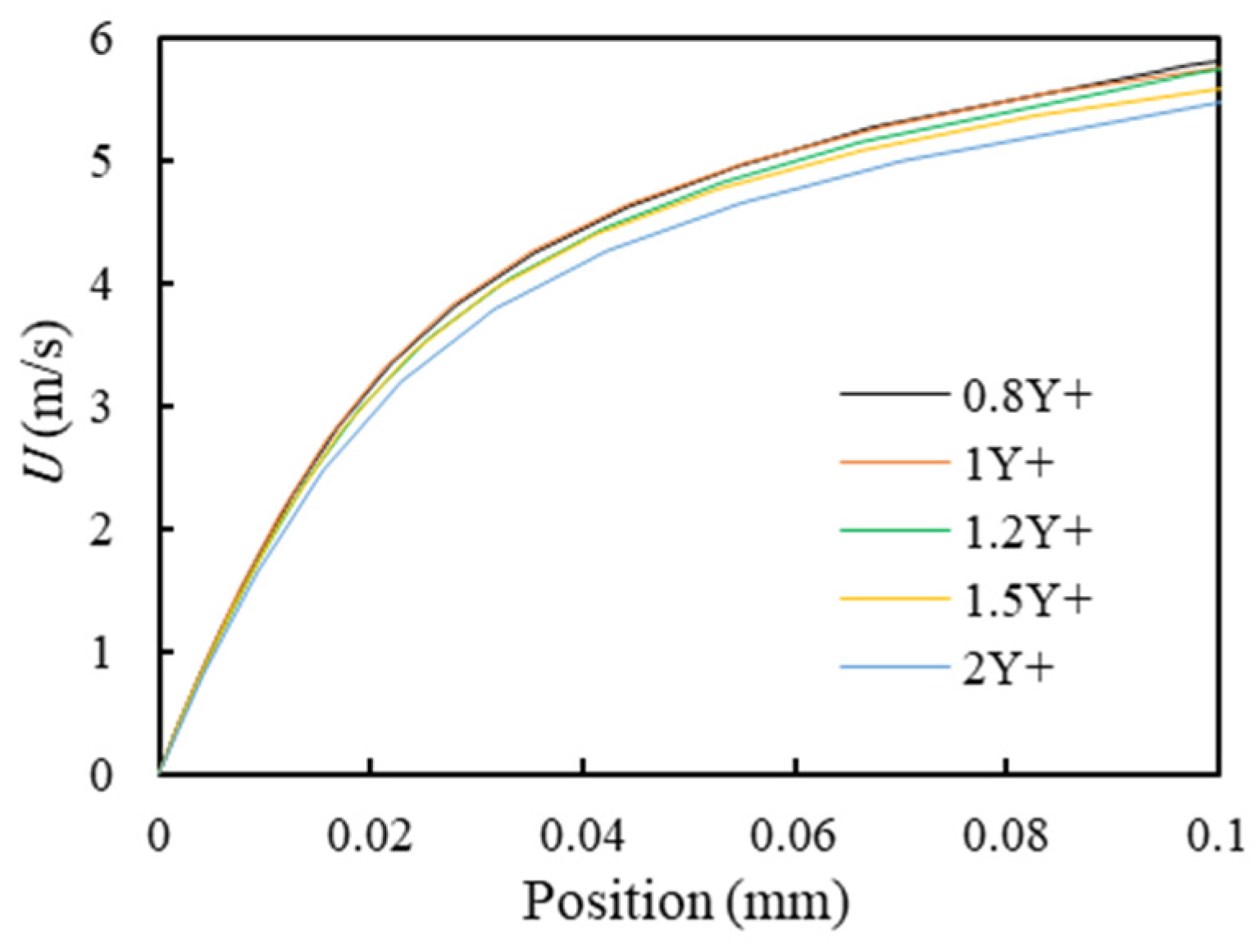
- The accurate calculation of the boundary layer is essential to analyze the fluid–structure coupling simulation of the CMF accurately, but accurate calculation of the boundary layer requires very fine mesh and very large numerical computation loading.
- In a factory, production lines typically include many complicated pipelines. Therefore, the installation angle of CMF must be adjusted according to the actual allowable space. A guideline is that the flow tube cannot be placed upwards, because air is lighter then water, otherwise the air will accumulate in the flow tube and cause measurement error. CMF can install any deflection angle under the premise that the flow tubes are oriented downward.
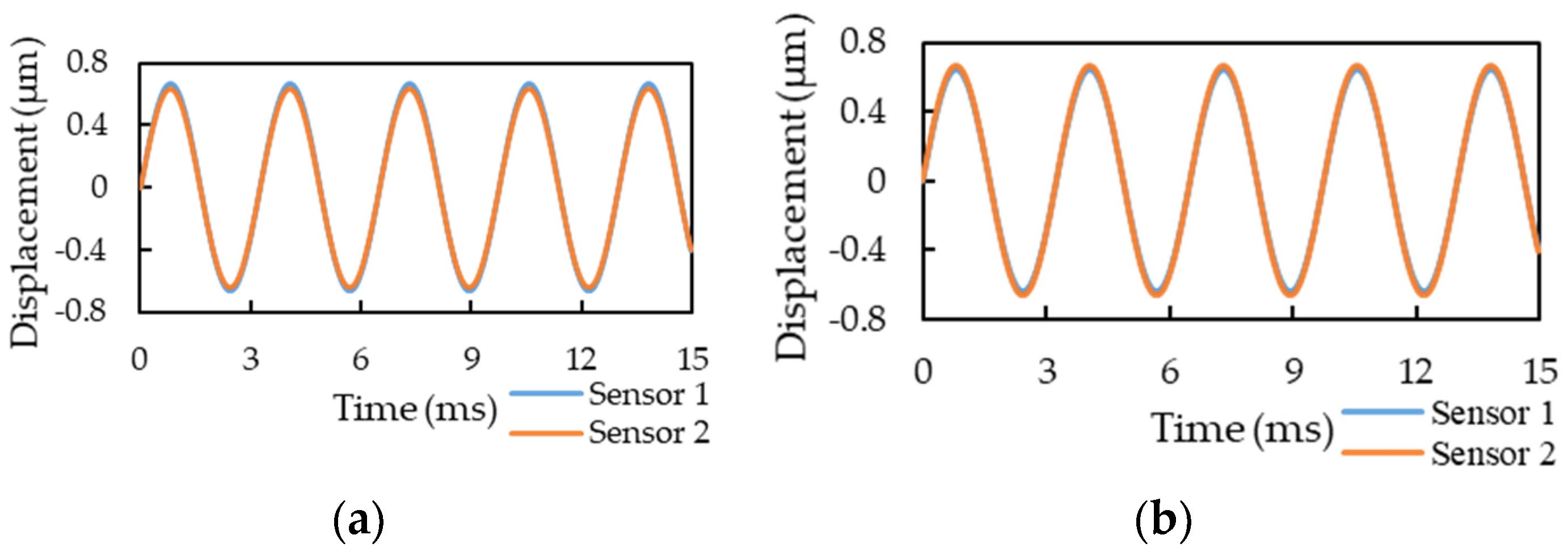
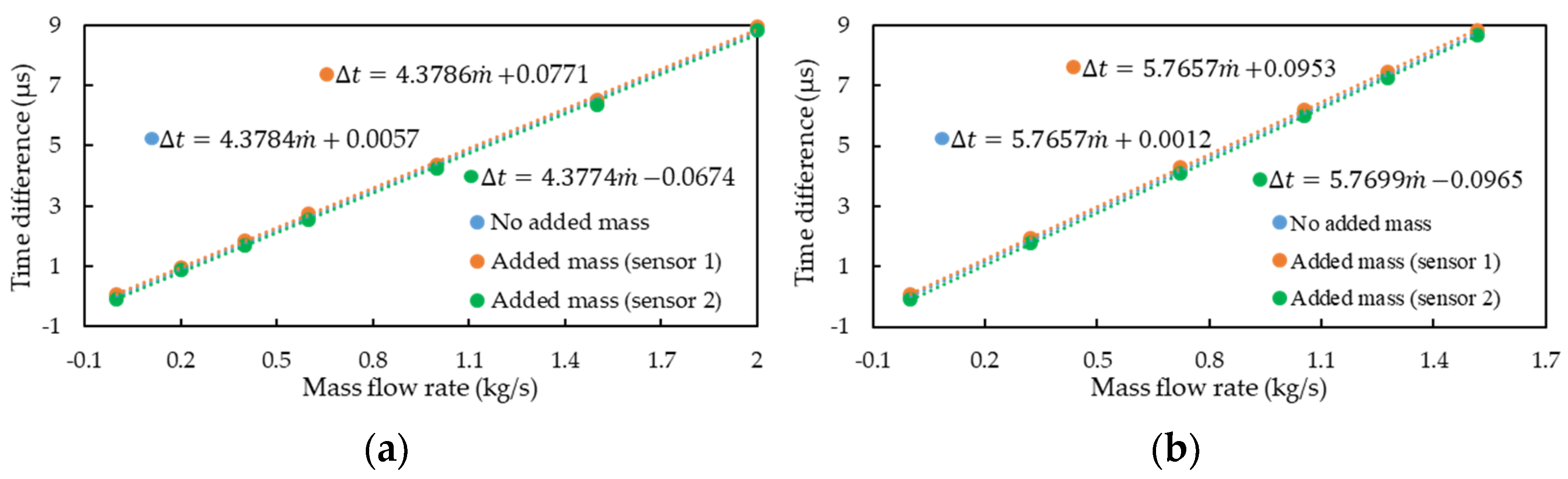
- The relationship between the mass flow rate and the time difference of the two motion sensors’ output is a linear function. The structural imbalance of the flow tubes only introduces an offset of such relationship, namely change the constant term of the linear function, under the premise that the unbalance mass is not large enough to change the resonant frequency of the CMF significantly.
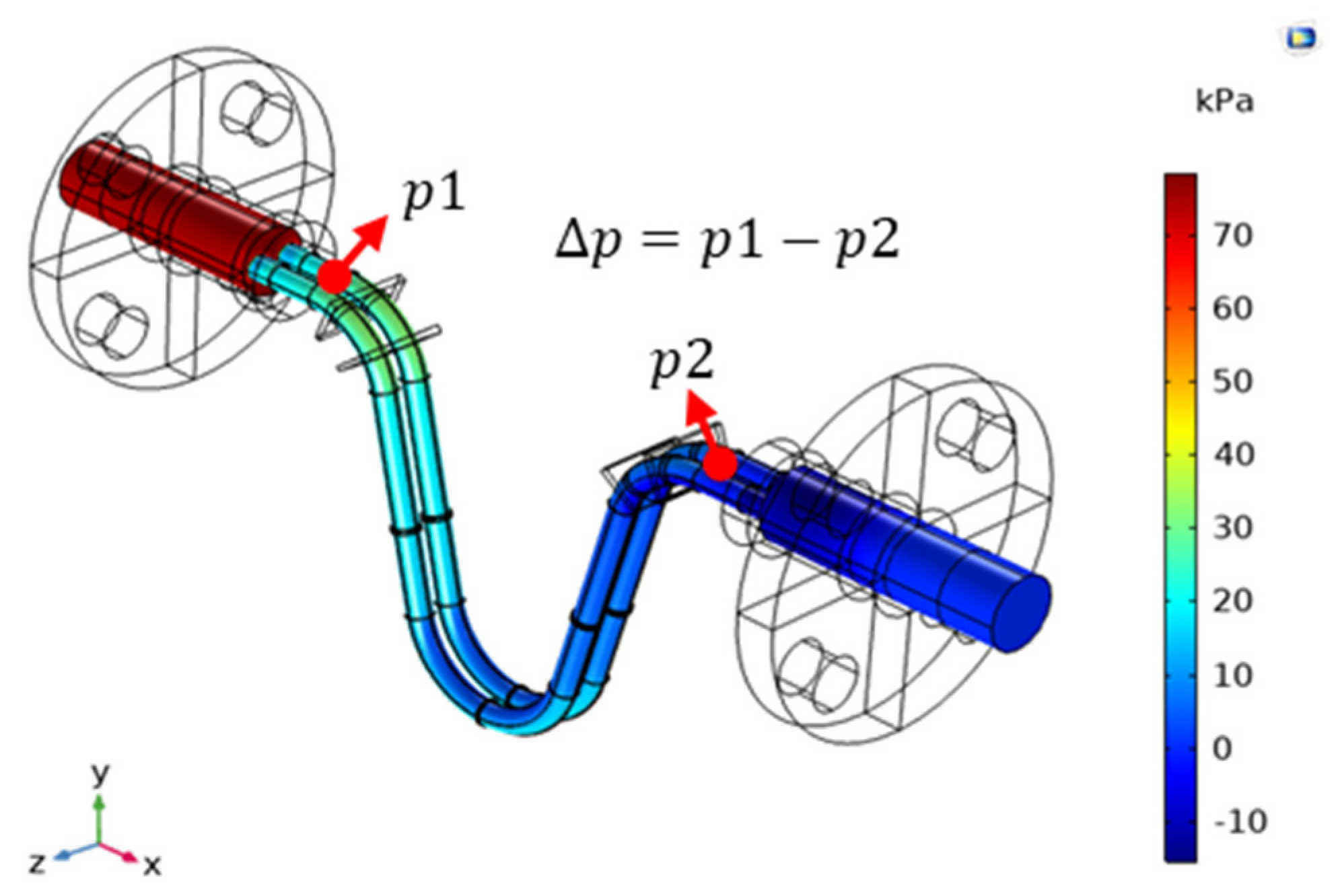
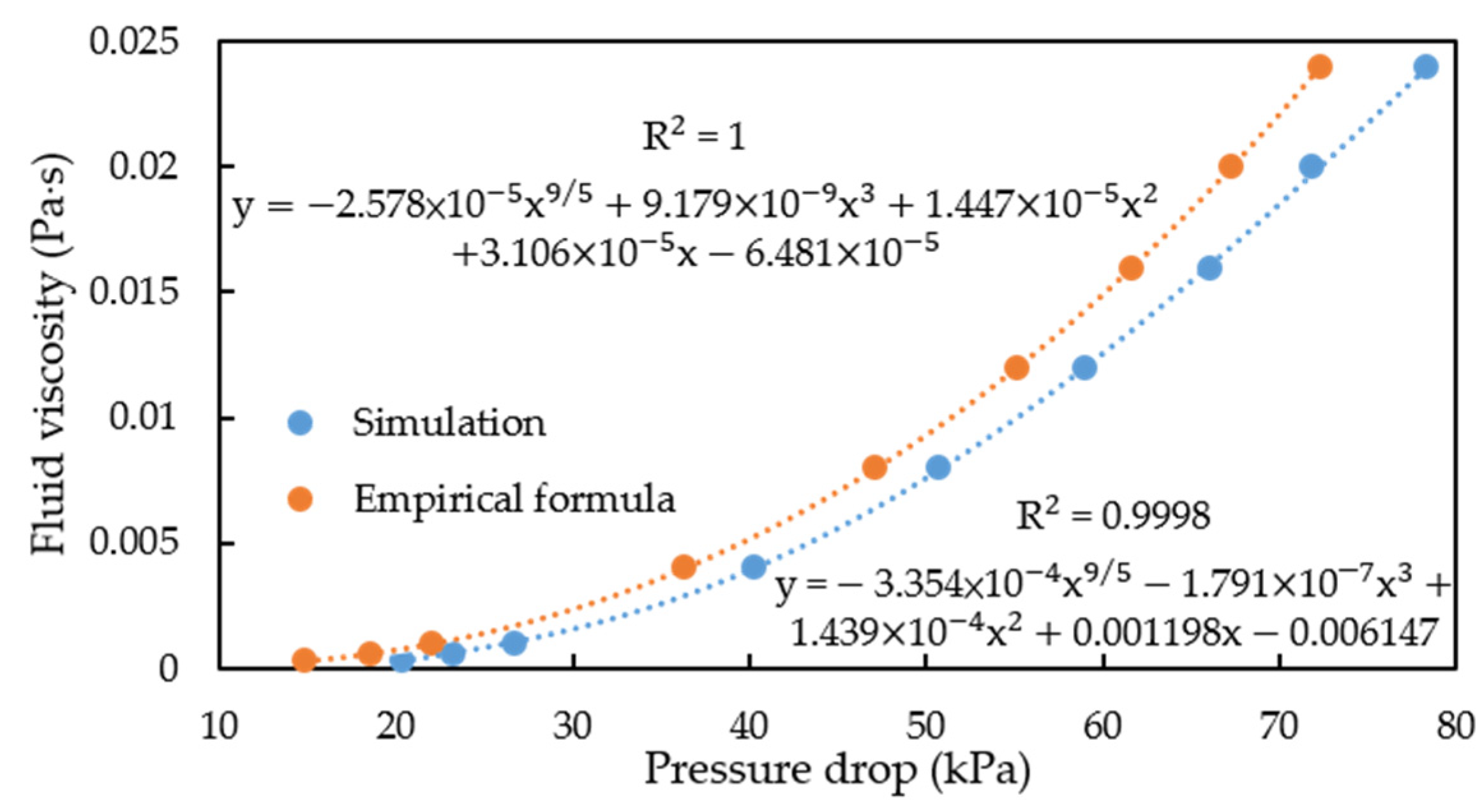
- The fluid viscosity can be deduced from the pressure drop of between the inlet and outlet of CMF, because the higher the fluid viscosity, the higher is the shear of the pipe wall, which causes changes in the pipe flow pressure drop. For CMF, the pressure drop is the sum of major and minor head loss multiplied by the gravitational acceleration and fluid density.
- Two empirical formula of driving force and fluid viscosity are proposed, one is a linear function and another is a cubic polynomial function; furthermore, the linear function is applicable for Re < 40,000 while the cubic polynomial function is for Re > 40,000. If the driving force is known, then the fluid viscosity may be deduced through the empirical formula. However, in practice, the driving current is known but not the driving force. Fortunately, the driving force of a voice coil actuator is proportional to the driving current. If the transfer function between the driving current and the driving force is known, then the fluid viscosity can be deduced from the driving current of the voice coil actuator through the two empirical formula of driving force and fluid viscosity. Firstly, the driving force is obtained from the transfer function of the driving force and driving current of the voice coil actuator. Secondly, assume the linear function is applicable, it is easy to calculate the fluid viscosity by substituting the driving force into the linear empirical formulas. Then, use the result to check whether Re is less than 40,000; if it is, the process ends, otherwise, the driving force is substituted into the cubic polynomial empirical formula to solve for the fluid viscosity, and the process ends.
- When the motion sensor is closer to the middle of the flow tube, its output signal increases linearly, while the time difference of signals outputted by the two motion sensors decreases linearly. Therefore, there is trade-off on the position of the motion sensors for the magnitude and time difference of the signal.
- If the pressure loss of pipe flow is too large, it is an effective method to design the flow splitter’s conical structure.
- The authors have developed a dual U-tube design application (App) based on COMSOL application development platform. Users can quickly evaluate their design through input the geometric and material parameters of the structure, the type of fluid, and the measurement specifications. The present application can significantly shorten product design and manufacturing time. The user interface is shown in Appendix A.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Appendix A. The User Interface of the COMSOL Simulation App
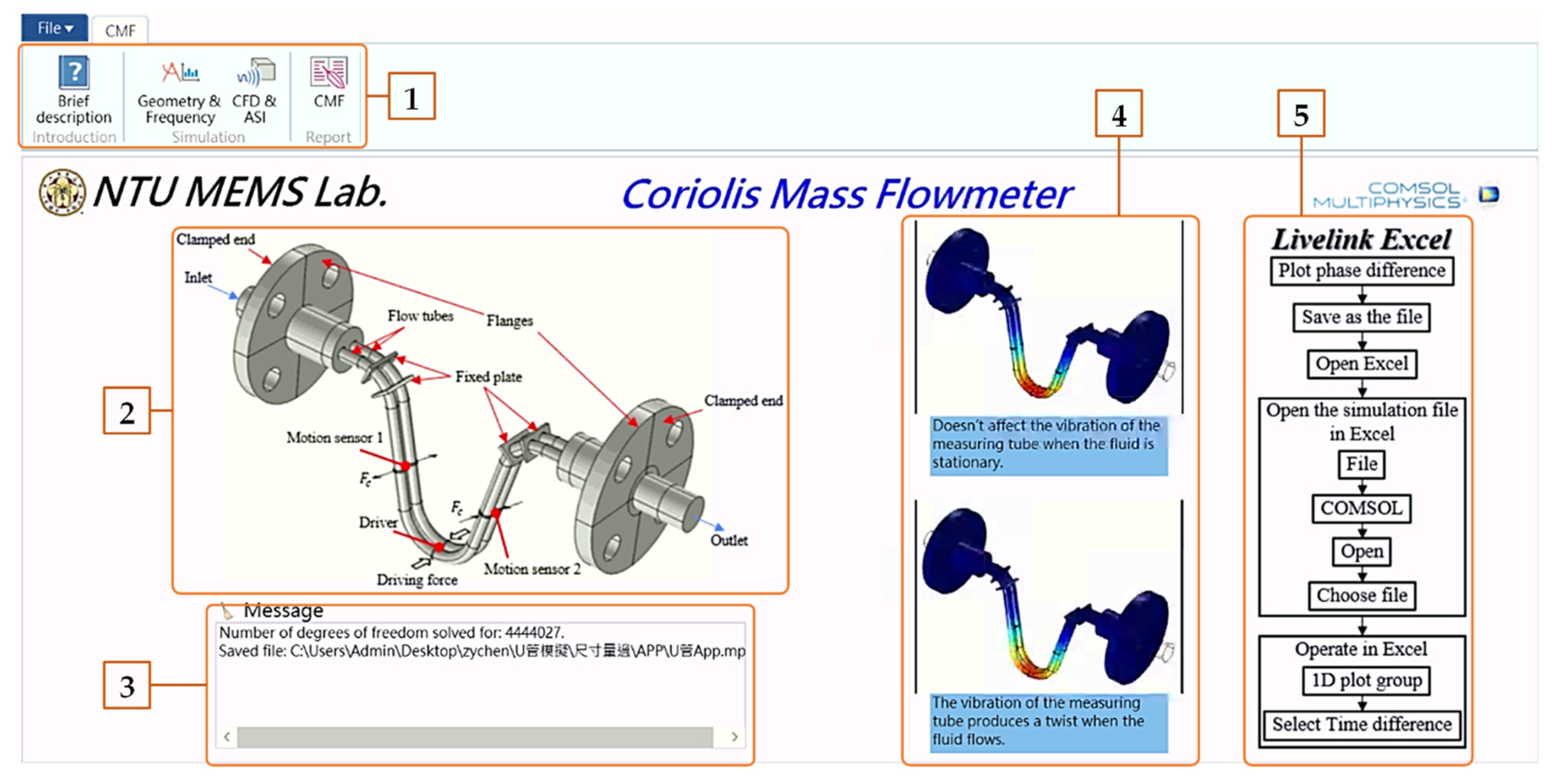
Appendix A.1. Simple Introduction Page
- (1)
- Pagination switching buttons: Positioned from left to right are the front cover of the simple introduction, geometric establishment and resonance frequency simulation, and computational fluid dynamics and simulation of the fluid–structure interaction.
- (2)
- Introduction to the dual U-tube CMF: Roughly describes the structure and boundary conditions of the simulated CMF with images.
- (3)
- Message window: Display the operation record of the simulation app.
- (4)
- Operation of the dual U-tube CMF: Aids the user in roughly understanding CMF operation when fluid is flowing or not flowing. The part above the text description is presented in the animation.
- (5)
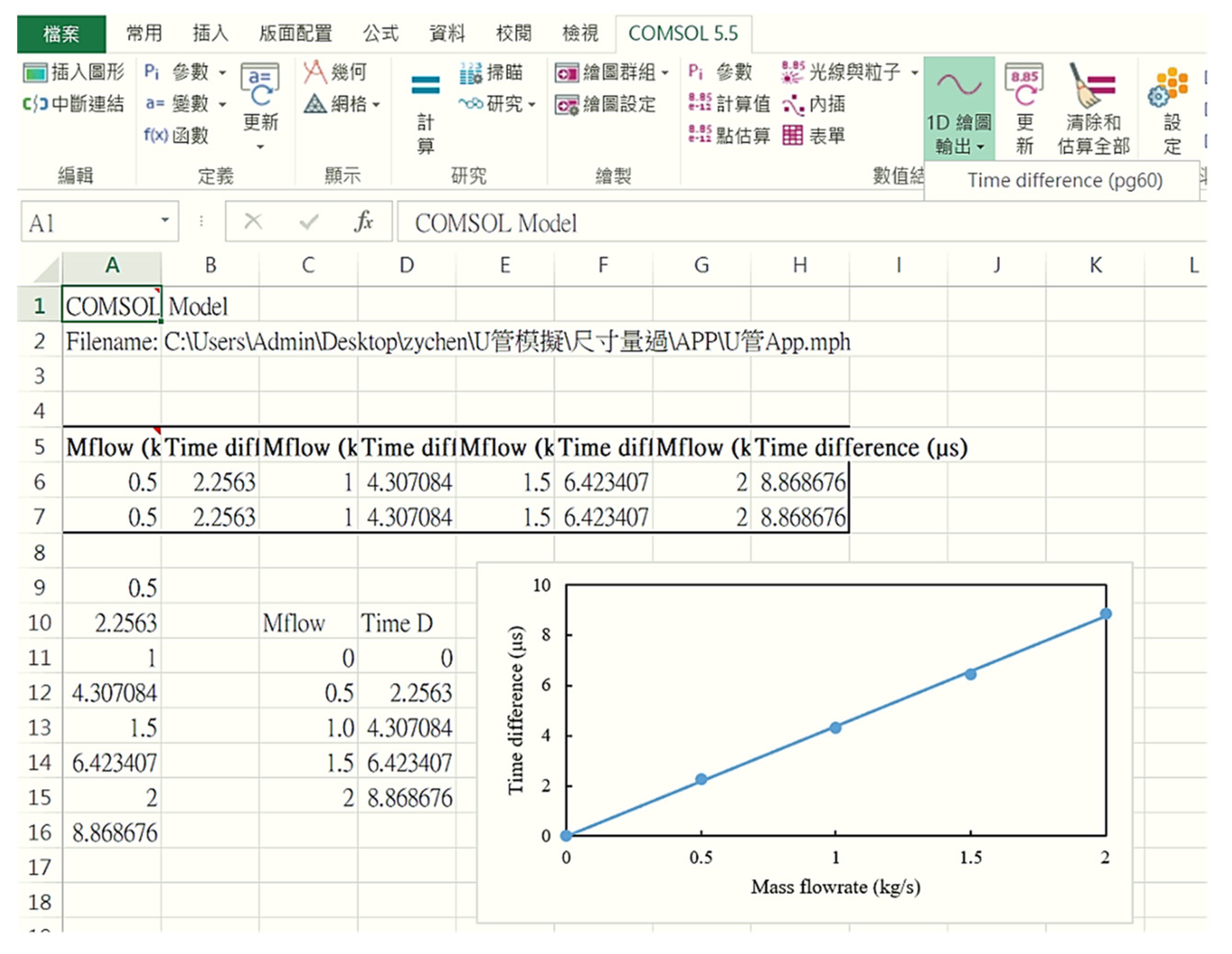
- Steps to connect to MS Excel: A flowchart providing users with an idea of how to connect COMSOL to MS Excel and process data.

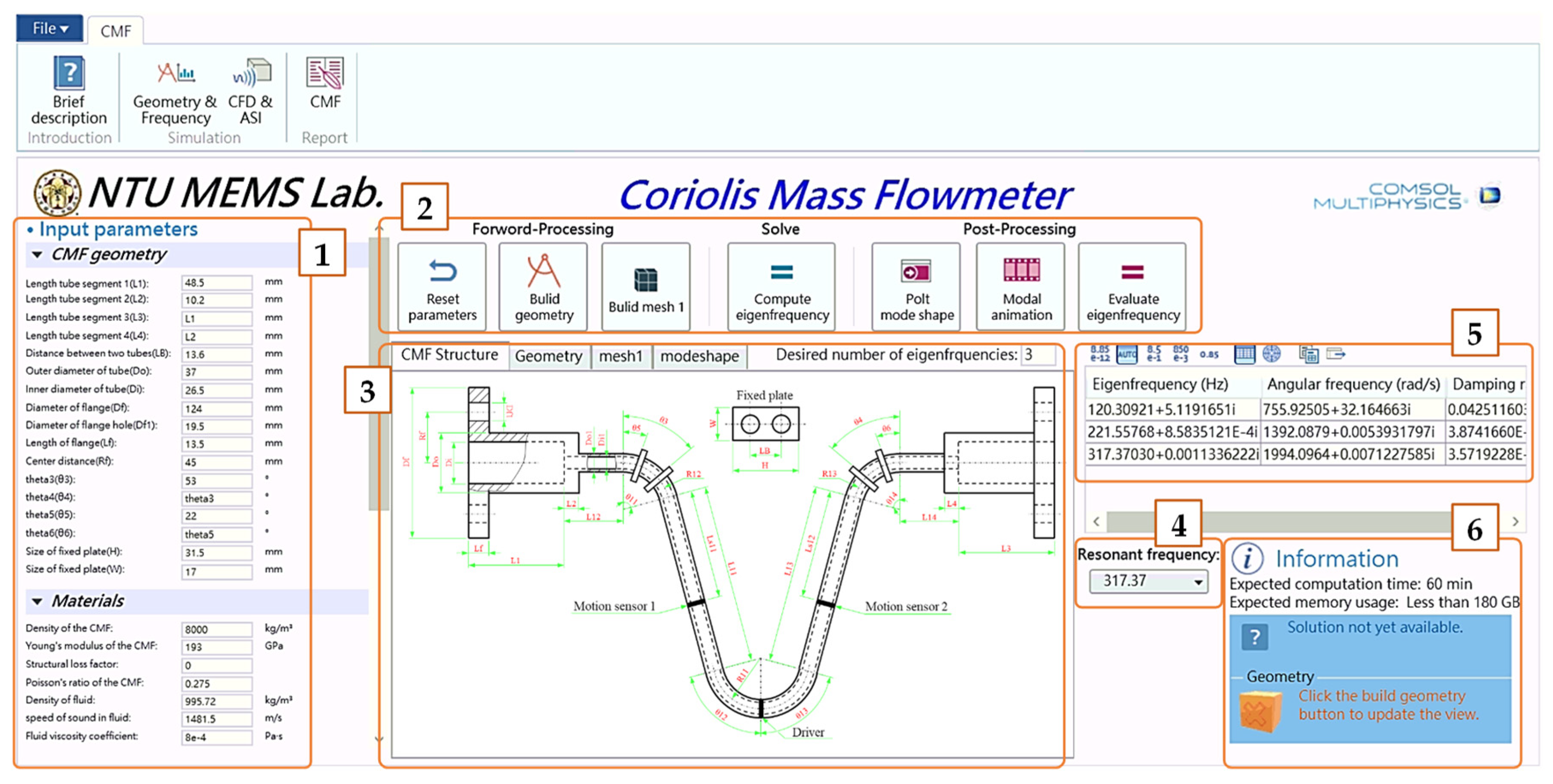
Appendix A.2. Geometry Establishment and Resonance Frequency Simulation Page
- (1)
- Input parameters: Includes the geometric and material parameters of the CMF.
- (2)
- Button area: Roughly divided into preprocessing, solving, and postprocessing. Placed from left to right are resetting parameters to set values, create geometry, create meshes, calculate characteristic frequencies, draw modals, and play modal animations.
- (3)
- Visualization results: Displays geometry and mesh creation results as well as simulation results. In the upper right corner, the user is allowed to input freely and solve several characteristic frequencies.
- (4)
- Dropdown list of frequency: The simulation result of the CMF resonance frequency can be selected to plot the mode of the frequency.
- (5)
- Display calculated value: Displays all the characteristic frequency values.
- (6)
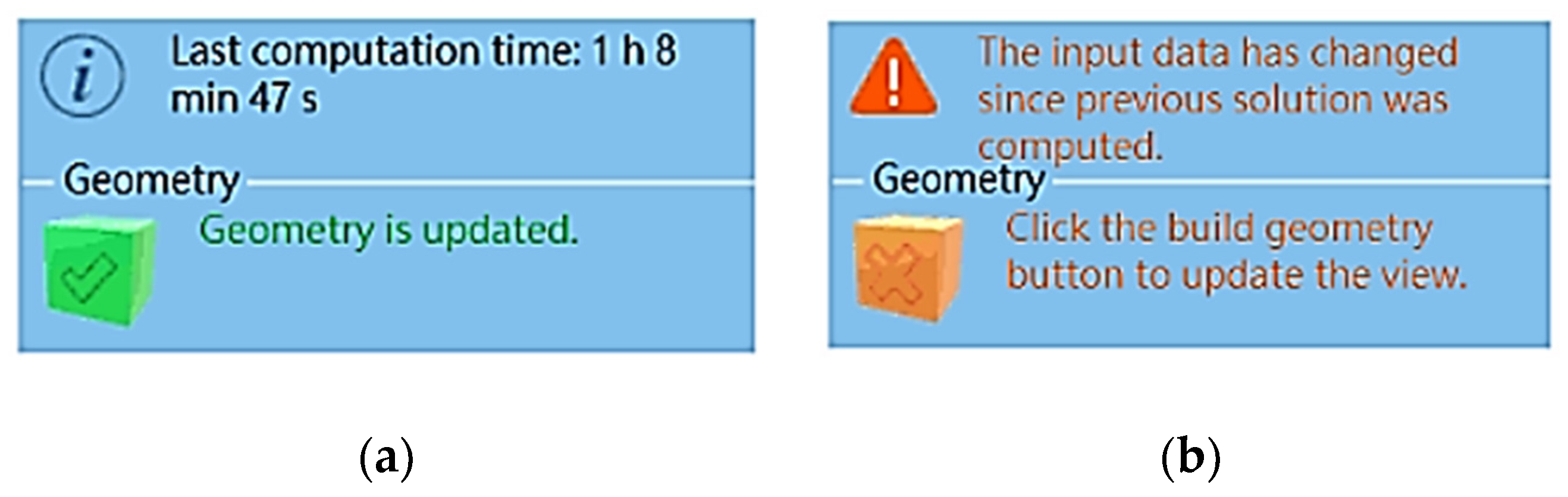
- Message window: Displays the status of geometry creation and the solution. Separate message windows are displayed when the geometry structure of the dual U-tube CMF is created and when the solution is completed. The information on the geometry creation and solution success is displayed to the user, Figure A3a. After the solution’s geometry is completed, any further changes to the parameters are displayed in separate message windows. Another message window reminds the user that parameters have been changed, Figure A3b.


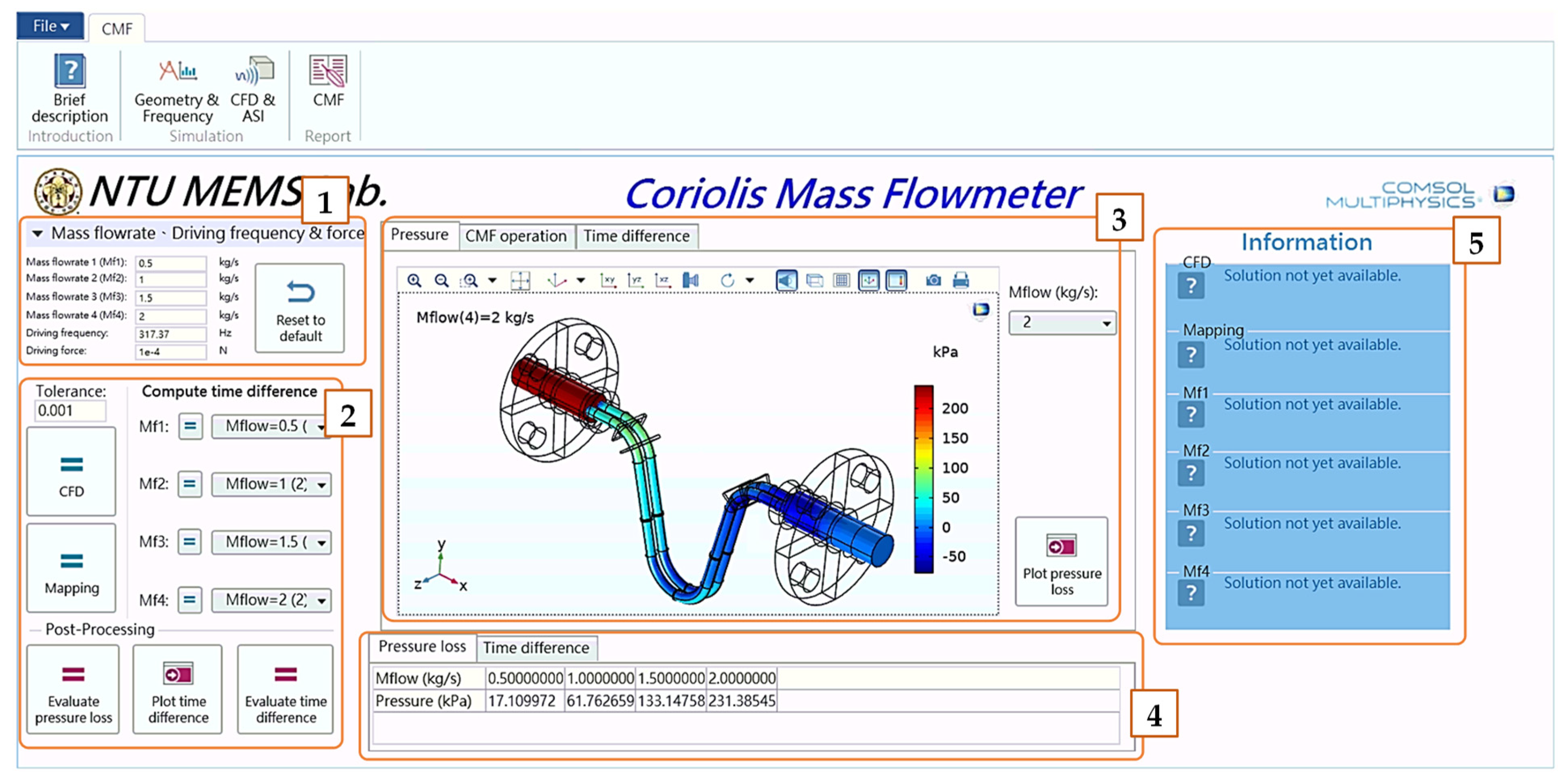
Appendix A.3. Computational Fluid Dynamics and Simulation of the Fluid–Structure Interaction Page
- (1)
- Input parameters: Displays parameters for mass flow rate, driving frequency, and driving force as well as a parameter reset button.
- (2)
- Solve and postprocessing button: The solve button enables the study of computational fluid dynamics, the marginal smoothening of the solution, and the simulation of the fluid–structure interaction to solve the phase difference. The above three steps must be solved in order. Also, users can input the iterative tolerance of CFD. Post-processing includes calculating the pipe flow pressure loss, plotting the relationship between mass flow rate and the phase difference, and calculating the phase difference.
- (3)
- Display of simulation results: Includes CMF pressure loss and operation as well as the relationship between mass flow rate and phase difference.
- (4)
- Display of calculated value: Displays the pressure loss and phase difference under different mass flow rates.
- (5)
- Message window: Displays the status of the solution. Its function is the same as the message window on the previous page.


References
- Wang, T.; Baker, R. Coriolis flowmeters: A review of developments over the past 20 years, and an assessment of the state of the art and likely future directions. Flow Meas. Instrum. 2014, 40, 99–123. [Google Scholar] [CrossRef]
- Sultan, G.; Hemp, J. Modelling of the Coriolis mass flowmeter. J. Sound Vib. 1989, 132, 473–489. [Google Scholar] [CrossRef]
- Raszillier, H.; Durst, F. Coriolis-effect in mass flow metering. Arch. Appl. Mech. 1991, 61, 192–214. [Google Scholar]
- Sultan, G. Single straight-tube Coriolis mass flowmeter. Flow Meas. Instrum. 1992, 3, 241–246. [Google Scholar] [CrossRef]
- Stack, C.; Garnett, R.; Pawlas, G. A finite element for the vibration analysis of a fluid-conveying Timoshenko beam. In Proceedings of the 34th Structures, Structural Dynamics and Materials Conference, La Jolla, CA, USA, 19–22 April 1993. [Google Scholar] [CrossRef]
- Kalotay, P. Density and viscosity monitoring systems using Coriolis flow meters. ISA Trans. 1999, 38, 303–310. [Google Scholar] [CrossRef]
- Keita, N.M. Ab Initio Simulation of Coriolis Mass Flowmeter. In Proceedings of the FLOMEKO 2000, Salvador, Brazil, 4–8 June 2000. [Google Scholar]
- Belhadj, A.; Cheesewright, R.; Clark, C. The simulation of Coriolis meter response to pulsating flow using a general purpose FE code. J. Fluids Struct. 2000, 14, 613–634. [Google Scholar] [CrossRef]
- Drahm, W.; Bjonnes, H. A Coriolis mass flowmeter with direct viscosity measurement. Comput. Control Eng. J. 2003, 14, 42–43. [Google Scholar] [CrossRef]
- Kumar, V.; Anklin, M.; Schwenter, B. Fluid-Structure Interaction (FSI) Simulations on the Sensitivity of Coriolis FlowMeter Under Low Reynolds Number Flows. In Proceedings of the 15th Flow Measurement Conference (FLOMEKO), Taipei, Taiwan, 13–15 October 2010. [Google Scholar]
- Romanov, V.; Beskachko, V. The simulation of Coriolis flow meter tube movements excited by fluid flow and exterior harmonic force. In Advanced Mathematical and Computational Tools in Metrology and Testing XI; Technology & Innovation Centre, University of Strathclyde: Glasgow, UK, 2017; pp. 29–31. [Google Scholar] [CrossRef]
- Gagliano, S.; Stella, G.; Bucolo, M. Real-time detection of slug velocity in microchannels. Micromachines 2020, 11, 241. [Google Scholar] [CrossRef] [PubMed]
- White, F.M.; Corfield, I. Viscous Fluid Flow; McGraw-Hill: New York, NY, USA, 2006. [Google Scholar]
- Jones, W.; Launder, B.E. The prediction of laminarization with a two-equation model of turbulence. Int. J. Heat Mass Transf. 1972, 15, 301–314. [Google Scholar] [CrossRef]
- Menter, F.R. Two-equation eddy-viscosity turbulence models for engineering applications. AIAA J. 1994, 32, 1598–1605. [Google Scholar] [CrossRef]
- Phuong, T.H.V. Dynamic Water Stiffness, Dynamic Water Damping and Dynamic Water Mass for Ship-Water-Interaction Analyses. In Proceedings of the International Conference on Advances in Computational Mechanics (ACOME), Ho Chi Minh City, Vietnam, 14–16 August 2012. [Google Scholar]
- Savić, V.; Knežević, D.; Lovrec, D.; Jocanović, M.; Karanović, V. Determination of pressure losses in hydraulic pipeline systems by considering temperature and pressure. Stroj. Vestn. J. Mech. Eng. 2009, 55, 237–243. [Google Scholar]
- Idelchik, I.E. Translation. In Handbook of Hydraulic Resistance; Hemisphere Publishing Corp.: Washington, DC, USA, 1986; p. 662. [Google Scholar]
- Paidoussis, M.P.; Issid, N. Dynamic stability of pipes conveying fluid. J. Sound Vib. 1974, 33, 267–294. [Google Scholar] [CrossRef]
- Donoso, G.; Ladera, C.; Martin, P. Magnetically coupled magnet–spring oscillators. Eur. J. Phys. 2010, 31, 433. [Google Scholar] [CrossRef]
- Anklin, M.; Drahm, W.; Rieder, A. Coriolis mass flowmeters: Overview of the current state of the art and latest research. Flow Meas. Instrum. 2006, 17, 317–323. [Google Scholar] [CrossRef]































{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Symbol | Values | Symbol | Values |
|---|---|---|---|
| Df | 124.00 mm | Df1 | 19.50 mm |
| Di | 26.50 mm | Di1 | 9.00 mm |
| Do | 37.00 mm | Do1 | 10.00 mm |
| H | 31.50 mm | LB | 13.60 mm |
| Lf | 13.50 mm | L1 = L3 | 48.50 mm |
| L2 = L4 | 10.20 mm | L11 = L13 | 83.00 mm |
| L12 = L14 | 28.70 mm | Ls11 = Ls12 | 50.70 mm |
| Rf | 45.00 mm | R11 | 31.65 mm |
| R12 = R13 | 31.70 mm | θ11 = θ14 | 76° |
| θ12 = θ13 | 76° | θ3 = θ4 | 53° |
| θ5 = θ6 | 22° | W | 17.00 mm |
| SAE 316L Stainless Steel | |
|---|---|
| Young’s Modulus (GPa) | 193 |
| Poisson Ratio | 0.275 |
| Density (kg/) | 8000 |
| Melting Point (°C) | 1400 |
| Thermal Expansion (1/K) | |
| Thermal Conductivity (W/m⋅K) | 16.3 |
| Electrical Resistivity (Ω⋅m) | |
| Driver mass (g) | 8.00 |
| Motion sensor mass (g) | 5.40 |
| Water at 25 °C | |
| Density (kg/) | 997.05 |
| Viscosity (mPa⋅s) | 0.89 |
| Constants | Values |
|---|---|
| Cμ | 0.09 |
| C1ε | 1.44 |
| C2ε | 1.92 |
| σk | 1 |
| σε | 1.3 |
| Constants | Values |
|---|---|
| α1 | 0.56 |
| α2 | 0.44 |
| 0.09 | |
| β1 | 0.075 |
| β2 | 0.0828 |
| σk1 | 0.5 |
| σk2 | 1 |
| σω1 | 0.5 |
| σω2 | 0.856 |
| Experiment | Simulation | ||||||
|---|---|---|---|---|---|---|---|
| wt % | Density by CMF (kg/m3) | Density by Meter (kg/m3) | Absolute Error (kg/m3) | Frequency (Hz) | Phase (mrad) | Density (kg/m3) | Frequency (Hz) |
| 0.00 | 998.0 | 997.1 | 0.9 | 327.56 | 0.006 | 995 | 317.39 |
| 1.00 | 1005.0 | 1004.3 | 0.7 | 327.25 | 0.002 | 1005 | 316.96 |
| 2.00 | 1012.1 | 1011.2 | 0.9 | 326.94 | 0.000 | 1015 | 316.53 |
| 4.00 | 1024.6 | 1025.4 | 0.8 | 326.38 | 0.006 | 1025 | 316.10 |
| 6.00 | 1039.3 | 1039.6 | 0.3 | 325.74 | 0.008 | 1035 | 315.67 |
| 8.00 | 1051.8 | 1053.8 | 2.0 | 325.20 | 0.001 | 1045 | 315.24 |
| 10.00 | 1068.8 | 1068.5 | 0.3 | 324.46 | 0.001 | 1055 | 314.82 |
| 12.00 | 1083.3 | 1083.5 | 0.2 | 323.84 | 0.009 | 1065 | 314.40 |
| 14.00 | 1099.4 | 1098.9 | 0.5 | 323.15 | 0.001 | 1075 | 313.98 |
| 16.00 | 1114.7 | 1115.1 | 0.4 | 322.5 | 0.001 | 1085 | 313.56 |
| 18.00 | 1128.7 | 1130.5 | 1.8 | 321.91 | 0.001 | 1095 | 313.14 |
| 20.00 | 1146.9 | 1147.2 | 0.3 | 321.15 | 0.004 | 1105 | 312.73 |
| 22.00 | 1161.8 | 1162.3 | 0.5 | 320.53 | 0.005 | 1115 | 312.31 |
| 24.00 | 1180.4 | 1181.9 | 1.5 | 319.76 | −0.002 | 1125 | 311.90 |
| 26.00 | 1192.6 | 1192.9 | 0.3 | 319.26 | 0.003 | 1135 | 311.49 |
| 1145 | 311.08 | ||||||
| 1155 | 310.67 | ||||||
| 1165 | 310.27 | ||||||
| 1175 | 309.86 | ||||||
| 1185 | 309.46 | ||||||
| 1195 | 309.06 | ||||||
| Experiment | Simulation | |||
|---|---|---|---|---|
| Flow Rate (kg/s) | Time Difference (μs) | Flow Rate (kg/s) | Time Difference (μs) | |
| k-ε Method | SST Method | |||
| 0.00 | 0.00 | 0.0 | 0.00 | 0.00 |
| 0.14 | 0.78 | 0.2 | 0.67 | 0.99 |
| 0.28 | 1.60 | 0.4 | 1.36 | 1.86 |
| 0.56 | 3.22 | 0.6 | 2.03 | 2.69 |
| 0.84 | 4.84 | 1.0 | 3.43 | 4.34 |
| 1.12 | 6.46 | 1.5 | 5.21 | 6.44 |
| 1.40 | 8.08 | 2.0 | 6.93 | 9.02 |
| 1.69 | 9.71 | |||
| 1.94 | 11.18 | |||
| Output Voltage of Sensor 1 (S1) | Output Voltage of Sensor 2 (S2) | S1-S2 | |
|---|---|---|---|
| No additional mass | 72.114 mV | 74.264 mV | −2.150 mV |
| Additional mass below Sensor 1 | 75.614 mV | 74.728 mV | 0.886 mV |
| Additional mass below Sensor 2 | 69.724 mV | 74.732 mV | −5.008 mV |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hu, Y.-C.; Chen, Z.-Y.; Chang, P.-Z. Fluid–Structure Coupling Effects in a Dual U-Tube Coriolis Mass Flow Meter. Sensors 2021, 21, 982. https://doi.org/10.3390/s21030982
Hu Y-C, Chen Z-Y, Chang P-Z. Fluid–Structure Coupling Effects in a Dual U-Tube Coriolis Mass Flow Meter. Sensors. 2021; 21(3):982. https://doi.org/10.3390/s21030982
Chicago/Turabian StyleHu, Yuh-Chung, Zen-Yu Chen, and Pei-Zen Chang. 2021. "Fluid–Structure Coupling Effects in a Dual U-Tube Coriolis Mass Flow Meter" Sensors 21, no. 3: 982. https://doi.org/10.3390/s21030982
APA StyleHu, Y.-C., Chen, Z.-Y., & Chang, P.-Z. (2021). Fluid–Structure Coupling Effects in a Dual U-Tube Coriolis Mass Flow Meter. Sensors, 21(3), 982. https://doi.org/10.3390/s21030982