Dynamic Temperature Management of Near-Sensor Processing for Energy-Efficient High-Fidelity Imaging

Abstract
1. Introduction
- We develop and validate an end-to-end modeling framework for studying energy, thermal, and noise implications of near-sensor processing. We use this framework to characterize different implications of a typical 3D stacked near-sensor architecture.
- Motivated by the characterization findings, we design principles and propose novel fidelity-driven runtime mechanisms for effective sensor thermal management.
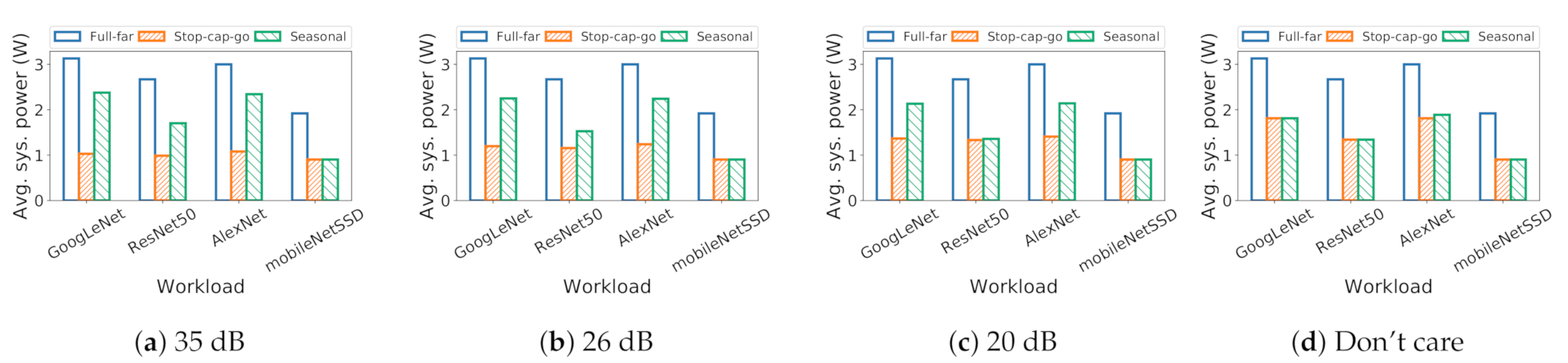
- Through emulation-based evaluation, we show that Stagioni determines duty cycling of near-sensor task processing to avoid fidelity issues that stem from thermal problems. We find that Stagioni reduces average system power by 22–53%; actual savings depend on specific power profiles and image fidelity needs.
2. Background and Related Work
3. Modeling Energy, Thermal, and Fidelity Implications of Near-Sensor Processing
3.1. Energy Analysis of Near-Sensor Processing
Energy of Vision Pipeline Components
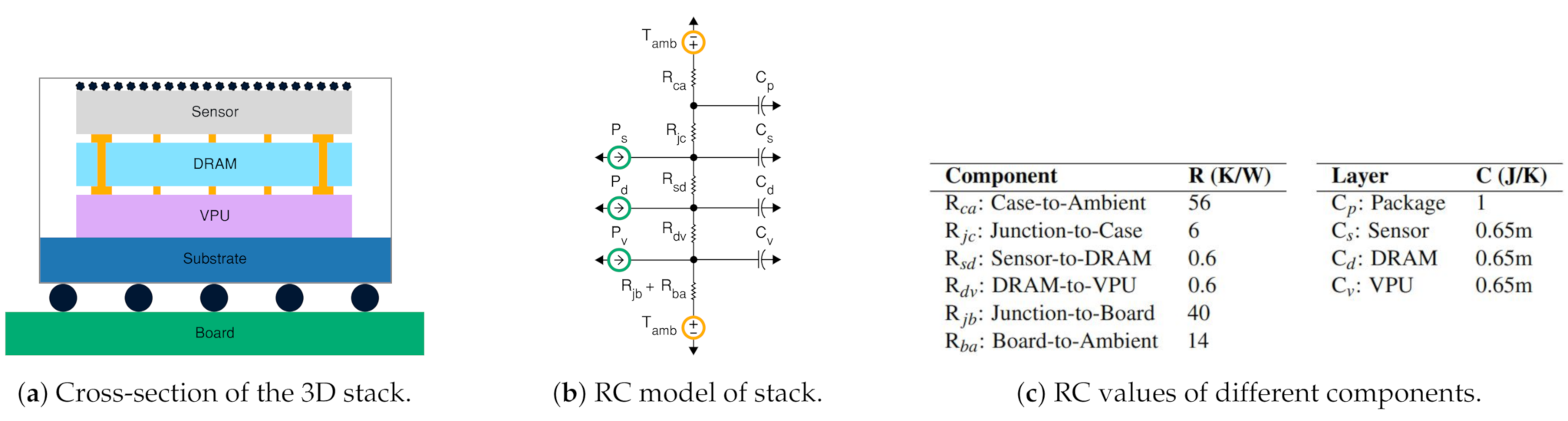
3.2. Thermal Analysis of Sensor Processing
3.2.1. Deriving the Component Values in the RC Model
3.2.2. Simulation-Based Thermal Analysis
3.3. Image Fidelity Implications of Temperature
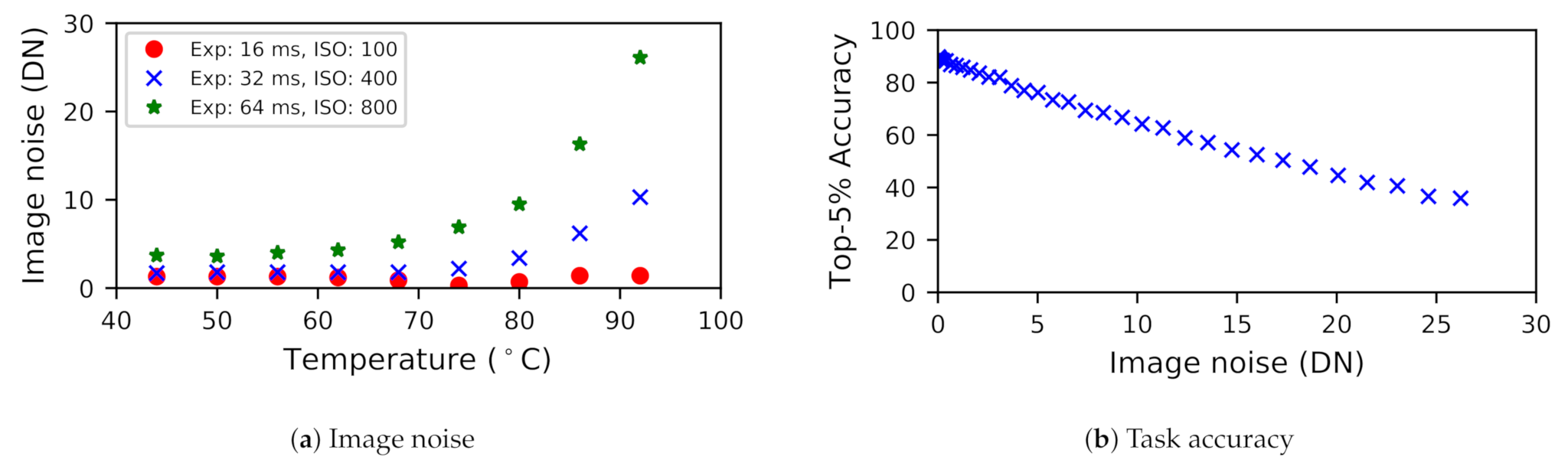
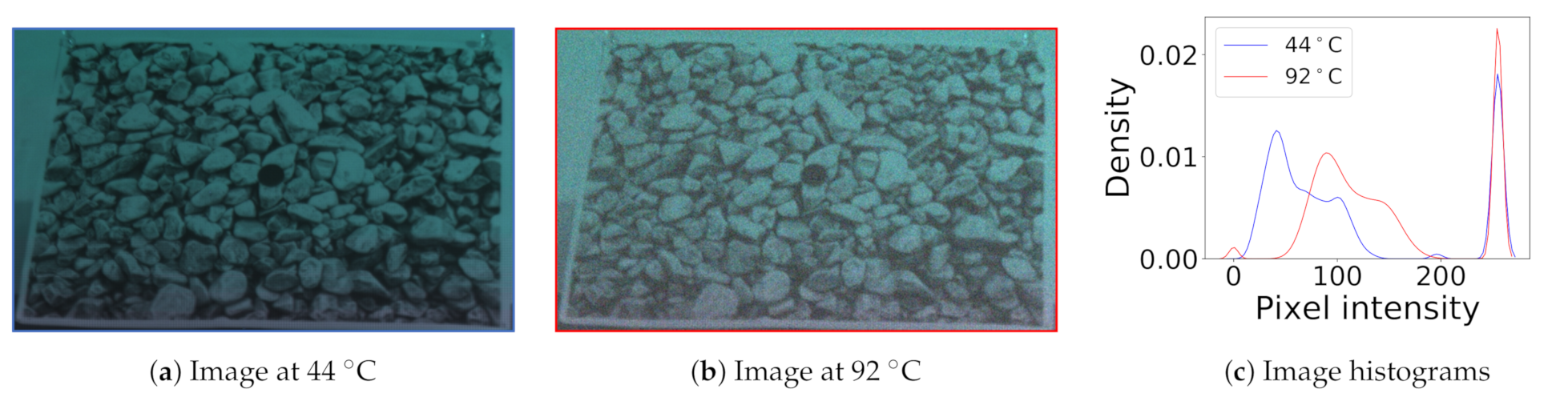
3.3.1. Noise Is more Prevalent at High Temperatures
3.3.2. Noise Visibly and Substantially Impairs Quality
3.4. Motivational Observations
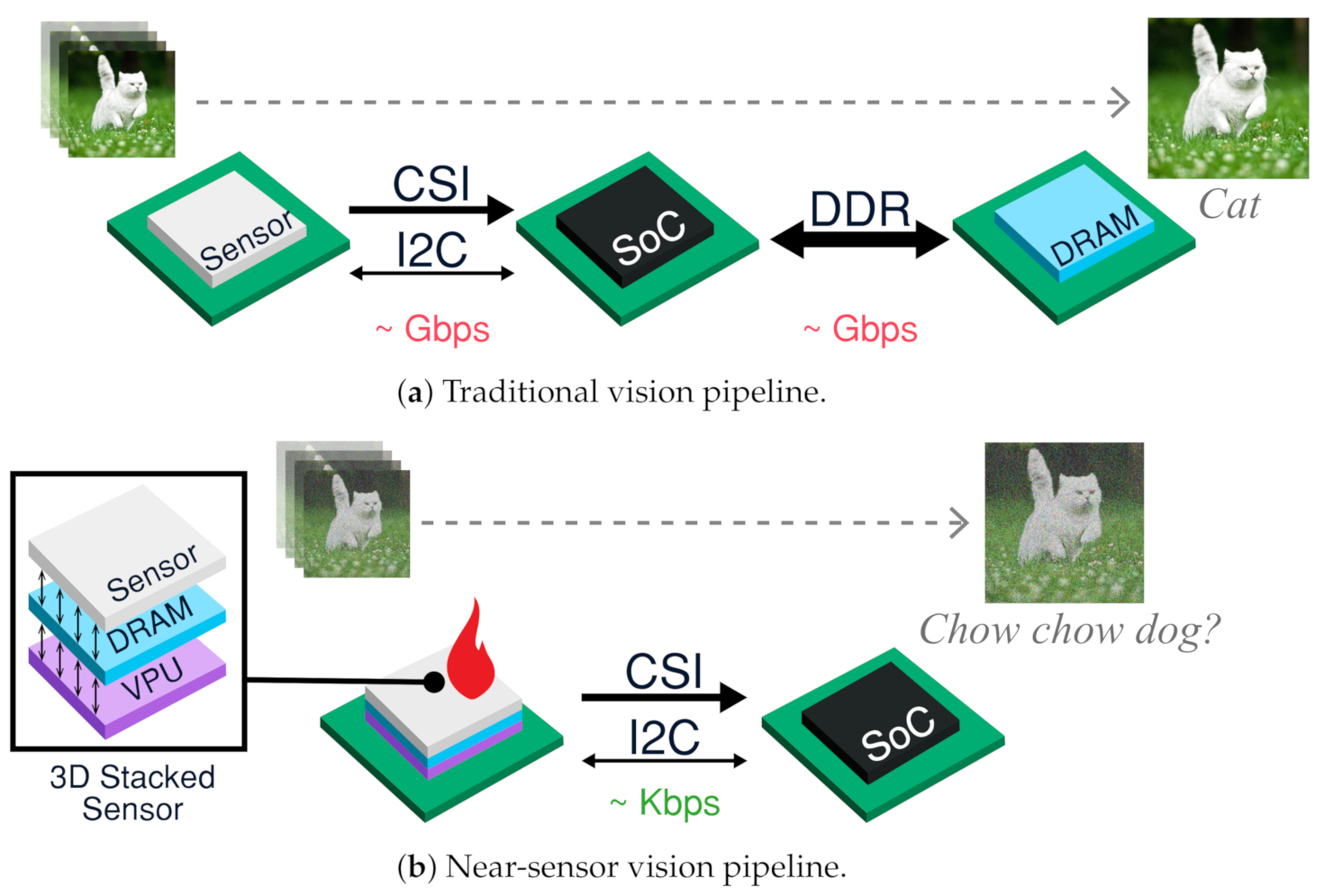
- Near-sensor processing promotes system energy-efficiency, but also increases sensor temperature.
- Raised sensor temperatures aggravate thermal noise.
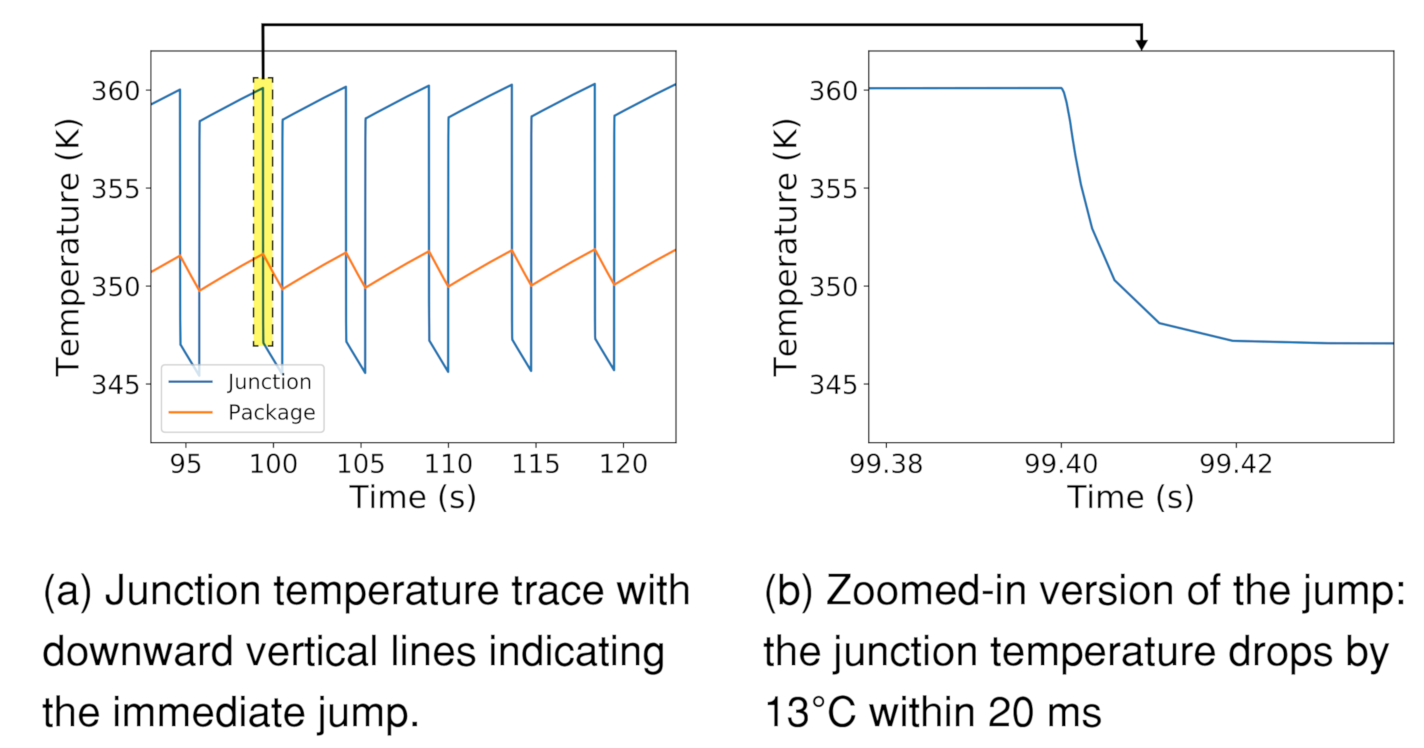
- Smaller (ms) sensor junction time constants facilitate an immediate sensor temperature drop.
- Fidelity needs are highly dynamic and depend on environment, e.g., lighting and ambient temperature.
- Imaging demands more fidelity, but vision tasks are also susceptible to noise, especially in low light.
4. Thermal Management for Near-Sensor Processing
4.1. Design Principles for Sensor Thermal Management
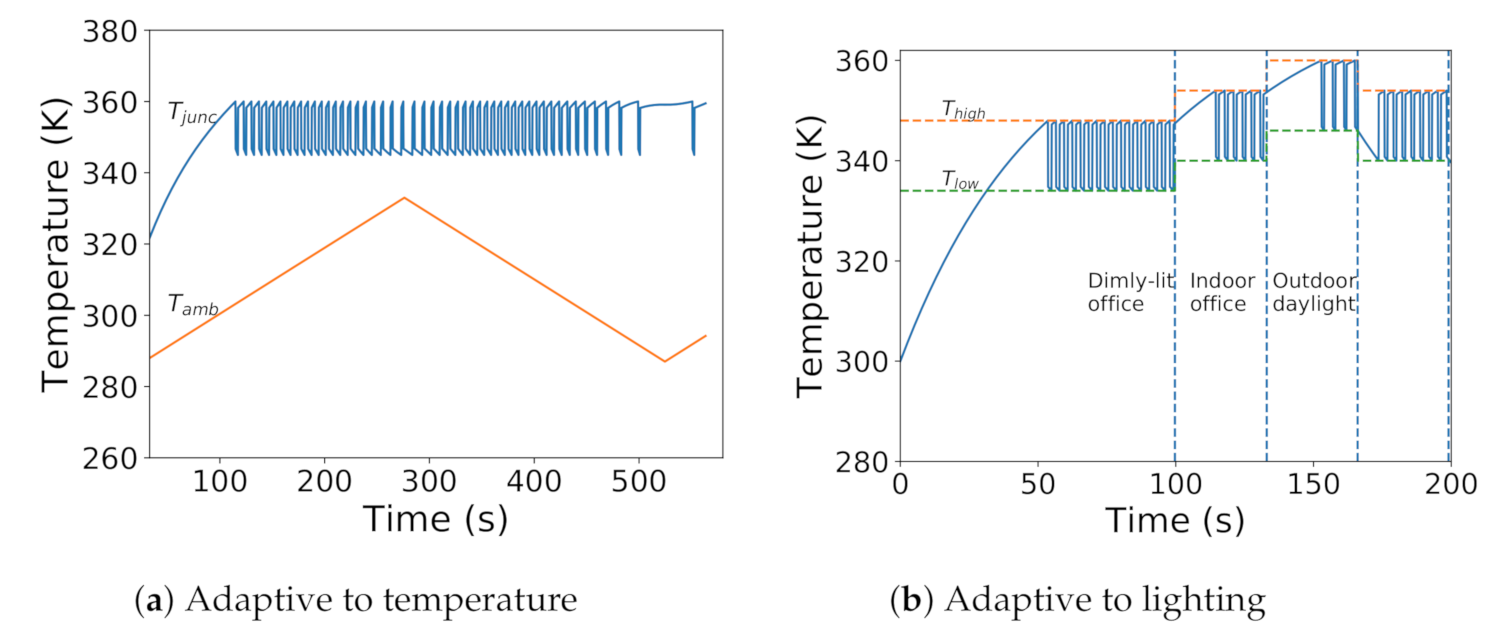
4.1.1. Situational Temperature Regulation
4.1.2. On-Demand Fidelity
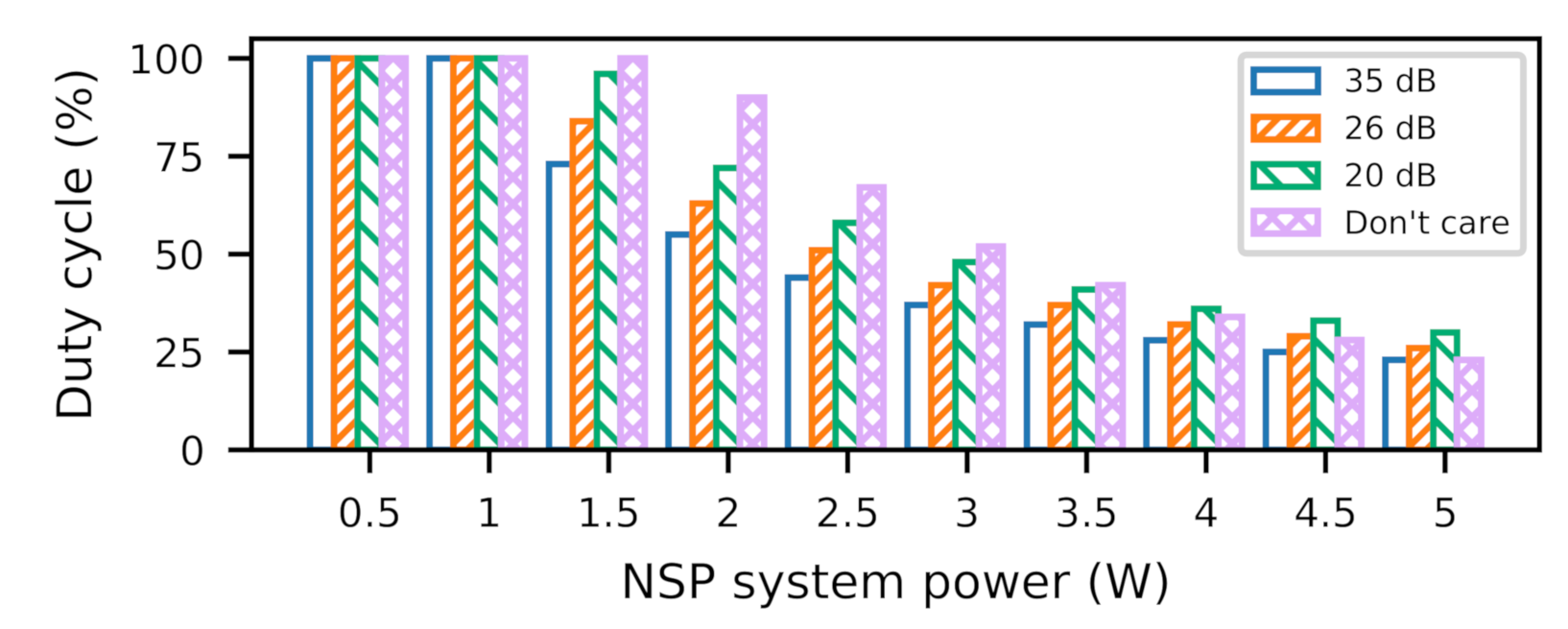
4.1.3. System Power Minimization through Duty Cycle
4.2. Stop-Capture-Go
4.3. Seasonal Migration
5. Experimental Methodology
5.1. Emulated Architecture
5.2. Emulation Setup
5.3. Workloads
6. Evaluation Results and Analysis
6.1. Duty Cycle
6.2. System Power Consumption
6.3. Overhead
6.4. Situational Awareness
7. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Enhancing Facebook’s AR Platform with Target Tracking Capabilities. Available online: https://research.fb.com/enhancing-facebooks-ar-platform-with-target-tracking-capabilities/ (accessed on 29 January 2021).
- Microsoft Hololens. Available online: https://www.microsoft.com/en-us/research/blog/ideas-blossom-for-using-microsoft-hololens/ (accessed on 29 January 2021).
- End-to-End Deep Learning for Self-Driving Cars. Available online: https://devblogs.nvidia.com/deep-learning-self-driving-cars/ (accessed on 29 January 2021).
- Azarkhish, E.; Rossi, D.; Loi, I.; Benini, L. Neurostream: Scalable and energy efficient deep learning with smart memory cubes. IEEE Trans. Parallel Distrib. Syst. 2018, 29, 420–434. [Google Scholar] [CrossRef]
- Pena, D.; Forembski, A.; Xu, X.; Moloney, D. Benchmarking of CNNs for low-cost, low-power robotics applications. In Proceedings of the RSS 2017 Workshop: New Frontier for Deep Learning in Robotics, Boston, MA, USA, 15 July 2017. [Google Scholar]
- History of 3D Stacked Image Sensors. Available online: http://www.3dic.org/3D_stacked_image_sensor (accessed on 7 August 2018).
- LiKamWa, R.; Hou, Y.; Gao, J.; Polansky, M.; Zhong, L. RedEye: Analog ConvNet image sensor architecture for continuous mobile vision. ACM SIGARCH Comput. Archit. News 2016, 44, 255–266. [Google Scholar] [CrossRef]
- Du, Z.; Fasthuber, R.; Chen, T.; Ienne, P.; Li, L.; Luo, T.; Feng, X.; Chen, Y.; Temam, O. ShiDianNao: Shifting vision processing closer to the sensor. In Proceedings of the 42nd Annual International Symposium on Computer Architecture, Portland, OR, USA, 13–17 June 2015. [Google Scholar]
- Dodge, S.; Karam, L. Understanding how image quality affects deep neural networks. In Proceedings of the 2016 Eighth International Conference on Quality of Multimedia Experience (QoMEX), Lisbon, Portugal, 6–8 June 2016. [Google Scholar]
- Skadron, K.; Stan, M.R.; Sankaranarayanan, K.; Huang, W.; Velusamy, S.; Tarjan, D. Temperature-aware microarchitecture: Modeling and implementation. ACM Trans. Archit. Code Optim. 2004, 1, 94–125. [Google Scholar] [CrossRef]
- Kumar, A.; Shang, L.; Peh, L.S.; Jha, N.K. System-level dynamic thermal management for high-performance microprocessors. IEEE Trans. Comput. Aided Des. Integr. Circuits Syst. 2008, 27, 96–108. [Google Scholar] [CrossRef]
- Donald, J.; Martonosi, M. Techniques for multicore thermal management: Classification and new exploration. ACM SIGARCH Comput. Archit. News 2006, 34, 78–88. [Google Scholar] [CrossRef]
- Isci, C.; Buyuktosunoglu, A.; Cher, C.Y.; Bose, P.; Martonosi, M. An analysis of efficient multi-core global power management policies: Maximizing performance for a given power budget. In Proceedings of the 39th Annual IEEE/ACM International Symposium on Microarchitecture, Orlando, FL, USA, 9–13 December 2006. [Google Scholar]
- Gomaa, M.; Powell, M.D.; Vijaykumar, T. Heat-and-run: Leveraging SMT and CMP to manage power density through the operating system. ACM Sigplan Not. 2004, 39, 260–270. [Google Scholar] [CrossRef]
- Amir, M.F.; Ko, J.H.; Na, T.; Kim, D.; Mukhopadhyay, S. 3-D Stacked Image Sensor With Deep Neural Network Computation. IEEE Sens. J. 2018, 18, 4187–4199. [Google Scholar] [CrossRef]
- Forchheimer, R.; Astrom, A. Near-sensor image processing: A new paradigm. IEEE Trans. Image Process. 1994, 3, 736–746. [Google Scholar] [CrossRef] [PubMed]
- Shi, Y.; Lichman, S. Smart Cameras: A Review; Citeseer Survey: Gothenburg, Sweden, 2005. [Google Scholar]
- Haruta, T.; Nakajima, T.; Hashizume, J.; Umebayashi, T.; Takahashi, H.; Taniguchi, K.; Kuroda, M.; Sumihiro, H.; Enoki, K.; Yamasaki, T.; et al. A 1/2.3 inch 20Mpixel 3-layer stacked CMOS Image Sensor with DRAM. In Proceedings of the 2017 IEEE International Solid-State Circuits Conference (ISSCC), San Francisco, CA, USA, 5–9 February 2017. [Google Scholar]
- Tech Insights. Samsung Galaxy S9 Camera Teardown. Available online: http://techinsights.com/about-techinsights/overview/blog/samsung-galaxy-s9-camera-teardown (accessed on 29 January 2021).
- Kumagai, O.; Niwa, A.; Hanzawa, K.; Kato, H.; Futami, S.; Ohyama, T.; Imoto, T.; Nakamizo, M.; Murakami, H.; Nishino, T.; et al. A 1/4-inch 3.9 Mpixel low-power event-driven back-illuminated stacked CMOS image sensor. In Proceedings of the IEEE International Solid-State Circuits Conference (ISSCC), San Francisco, CA, USA, 11–15 February 2018. [Google Scholar]
- Sony. CIS with Embedded AI Processor. Available online: https://www.sony.net/SonyInfo/News/Press/202005/20-037E/ (accessed on 29 January 2021).
- Lowe, D.G. Object Recognition from Local Scale-Invariant Features; ICCV: Vienna, Austria, 1999. [Google Scholar]
- Jia, Y.; Shelhamer, E.; Donahue, J.; Karayev, S.; Long, J.; Girshick, R.; Guadarrama, S.; Darrell, T. Caffe: Convolutional architecture for fast feature embedding. In Proceedings of the 22nd ACM international conference on Multimedia, Mountain View, CA, USA, 18–19 June 2014. [Google Scholar]
- Abadi, M.; Barham, P.; Chen, J.; Chen, Z.; Davis, A.; Dean, J.; Devin, M.; Ghemawat, S.; Irving, G.; Isard, M.; et al. Tensorflow: A System for Large-Scale Machine Learning; OSDI: Boulder, CO, USA, 2016. [Google Scholar]
- BVLC. Caffe Performance Measurements on NVIDIA GPUs. Available online: http://tutorial.caffe.berkeleyvision.org/performance_hardware.html (accessed on 29 January 2021).
- Pham, P.H.; Jelaca, D.; Farabet, C.; Martini, B.; LeCun, Y.; Culurciello, E. NeuFlow: Dataflow vision processing system-on-a-chip. In Proceedings of the 2012 IEEE 55th International Midwest Symposium on Circuits and Systems (MWSCAS), Boise, Idaho, 5–8 August 2012. [Google Scholar]
- Cavigelli, L.; Magno, M.; Benini, L. Accelerating real-time embedded scene labeling with convolutional networks. In Proceedings of the 52nd Annual Design Automation Conference, San Francisco, CA, USA, 8–12 June 2015. [Google Scholar]
- Zhang, C.; Li, P.; Sun, G.; Guan, Y.; Xiao, B.; Cong, J. Optimizing fpga-based accelerator design for deep convolutional neural networks. In Proceedings of the 2015 ACM/SIGDA International Symposium on Field-Programmable Gate Arrays, Monterey, CA, USA, 22–24 February 2015. [Google Scholar]
- Zhang, C.; Fang, Z.; Zhou, P.; Pan, P.; Cong, J. Caffeine: Towards uniformed representation and acceleration for deep convolutional neural networks. IEEE Trans. Comput. Aided Des. Integr. Circuits Syst. 2018, 38, 2072–2085. [Google Scholar] [CrossRef]
- Chen, Y.H.; Emer, J.; Sze, V. Eyeriss: A spatial architecture for energy-efficient dataflow for convolutional neural networks. ACM SIGARCH Comput. Archit. News 2016, 44, 367–379. [Google Scholar] [CrossRef]
- Han, S.; Liu, X.; Mao, H.; Pu, J.; Pedram, A.; Horowitz, M.A.; Dally, W.J. EIE: Efficient inference engine on compressed deep neural network. ACM SIGARCH Comput. Archit. News 2016, 44, 243–254. [Google Scholar] [CrossRef]
- Simonyan, K.; Zisserman, A. Very deep convolutional networks for large-scale image recognition. arXiv 2014. [Google Scholar]
- Levoy, M. Noise and ISO. Available online: https://graphics.stanford.edu/courses/cs178/lectures/noise-29apr14.pdf (accessed on 29 January 2021).
- Brooks, D.; Martonosi, M. Dynamic thermal management for high-performance microprocessors. In Proceedings of the Seventh International Symposium on High-Performance Computer Architecture, Nuevo Leone, Mexico, 20–24 January 2001. [Google Scholar]
- Lie, D.; Chae, K.; Mukhopadhyay, S. Analysis of the performance, power, and noise characteristics of a cmos image sensor with 3-d integrated image compression unit. IEEE Trans. Compon. Packag. Manuf. Technol. 2014, 4, 198–208. [Google Scholar] [CrossRef]
- LiKamWa, R.; Priyantha, B.; Philipose, M.; Zhong, L.; Bahl, P. Energy characterization and optimization of image sensing toward continuous mobile vision. In Proceedings of the 11th Annual International Conference on Mobile Systems, Applications, and Services, Taipei, Taiwan, 25–28 June 2013. [Google Scholar]
- Choi, J.; Park, S.; Cho, J.; Yoon, E. An energy/illumination-adaptive CMOS image sensor with reconfigurable modes of operations. IEEE J. Solid State Circuits 2015, 50, 1438–1450. [Google Scholar] [CrossRef]
- Micron Technologies. Power Calculators. Available online: https://www.micron.com/support/tools-and-utilities/power-calc (accessed on 29 January 2021).
- Xilinx. Xilinx Power Estimator. Available online: https://www.xilinx.com/products/technology/power/xpe.html (accessed on 29 January 2021).
- Borkar, S. Design challenges of technology scaling. IEEE Micro 1999, 19, 23–29. [Google Scholar] [CrossRef]
- Skadron, K.; Abdelzaher, T.; Stan, M.R. Control-theoretic techniques and thermal-RC modeling for accurate and localized dynamic thermal management. In Proceedings of the Eighth International Symposium on High Performance Computer Architecture, Boston, MA, USA, 2–6 February 2002. [Google Scholar]
- Yu, Y.J.; Wu, C.J. Designing a Temperature Model to Understand the Thermal Challenges of Portable Computing Platforms. In Proceedings of the 2018 17th IEEE Intersociety Conference on Thermal and Thermomechanical Phenomena in Electronic Systems (ITherm), San Diego, CA, USA, 29 May–1 June 2018. [Google Scholar]
- Heo, S.; Barr, K.; Asanović, K. Reducing power density through activity migration. In Proceedings of the 2003 International Symposium on Low Power Electronics and Design, Seoul, Korea, 25–27 August 2003. [Google Scholar]
- OnSemi. Python 1300 Datasheet. Available online: https://www.onsemi.com/pub/Collateral/NOIP1SN1300A-D.PDF (accessed on 29 January 2021).
- Qualcomm. Snapdragon 636 Mobile Platform. Available online: https://www.qualcomm.com/products/snapdragon-636-mobile-platform (accessed on 29 January 2021).
- Qualcomm. Snapdragon Profiler. Available online: https://developer.qualcomm.com/software/snapdragon-profiler (accessed on 29 January 2021).
- OnSemi. AR0330 Image Sensor Datasheet. Available online: https://www.onsemi.com/pub/Collateral/AR0330CM-D.PDF (accessed on 10 August 2018).
- Microsemi. Imaging and Video Solution. Available online: https://www.microsemi.com/products/fpga-soc/imaging (accessed on 29 January 2021).
- Milojičić, D.S.; Douglis, F.; Paindaveine, Y.; Wheeler, R.; Zhou, S. Process migration. ACM Comput. Surv. 2000, 32, 241–299. [Google Scholar] [CrossRef]
- Richmond, M.; Hitchens, M. A new process migration algorithm. ACM SIGOPS Oper. Syst. Rev. 1997, 31, 31–42. [Google Scholar] [CrossRef]
- Google. AIY Vision Kit. Available online: https://aiyprojects.withgoogle.com/vision/ (accessed on 29 January 2021).
- Intel. Intel Neural Compute Stick. Available online: https://software.intel.com/en-us/neural-compute-stick/get-started (accessed on 29 January 2021).
- Xilinx. HLS Based Deep Neural Network Accelerator Library for Xilinx Ultrascale+ MPSoCs. Available online: https://github.com/Xilinx/CHaiDNN (accessed on 29 January 2021).
- Po-Hsun, S. CapraRawCamera: Android App for Collecting Raw Photos for Computer Vision. Available online: https://github.com/cucapra/CapraRawCamera (accessed on 29 January 2021).










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Component | Energy (pJ/pixel) |
|---|---|
| Sensing | 595 |
| Communication (Sensor-SoC) | 900 |
| Communication (SoC-DRAM) | 2800 |
| Storage (Read) | 283 |
| Storage (Write) | 394 |
| DNN Model (VPU Arch) | Frame Rate (fps) | Trad. Sys Power (W) | NSP Sys Power (W) |
|---|---|---|---|
| AlexNet (Myriad2) | 12 | 3 | 1.86 |
| mobileNetSSD (Myriad2) | 11.8 | 1.92 | 0.9 |
| GoogLeNet (Neurostream) | 83 | 3.13 | 1.81 |
| ResNet50 (Neurostream) | 34 | 2.67 | 1.34 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kodukula, V.; Katrawala, S.; Jones, B.; Wu, C.-J.; LiKamWa, R. Dynamic Temperature Management of Near-Sensor Processing for Energy-Efficient High-Fidelity Imaging. Sensors 2021, 21, 926. https://doi.org/10.3390/s21030926
Kodukula V, Katrawala S, Jones B, Wu C-J, LiKamWa R. Dynamic Temperature Management of Near-Sensor Processing for Energy-Efficient High-Fidelity Imaging. Sensors. 2021; 21(3):926. https://doi.org/10.3390/s21030926
Chicago/Turabian StyleKodukula, Venkatesh, Saad Katrawala, Britton Jones, Carole-Jean Wu, and Robert LiKamWa. 2021. "Dynamic Temperature Management of Near-Sensor Processing for Energy-Efficient High-Fidelity Imaging" Sensors 21, no. 3: 926. https://doi.org/10.3390/s21030926
APA StyleKodukula, V., Katrawala, S., Jones, B., Wu, C.-J., & LiKamWa, R. (2021). Dynamic Temperature Management of Near-Sensor Processing for Energy-Efficient High-Fidelity Imaging. Sensors, 21(3), 926. https://doi.org/10.3390/s21030926