
Panoramic Visual SLAM Technology for Spherical Images



Abstract
1. Introduction
2. Related Works
- (1)
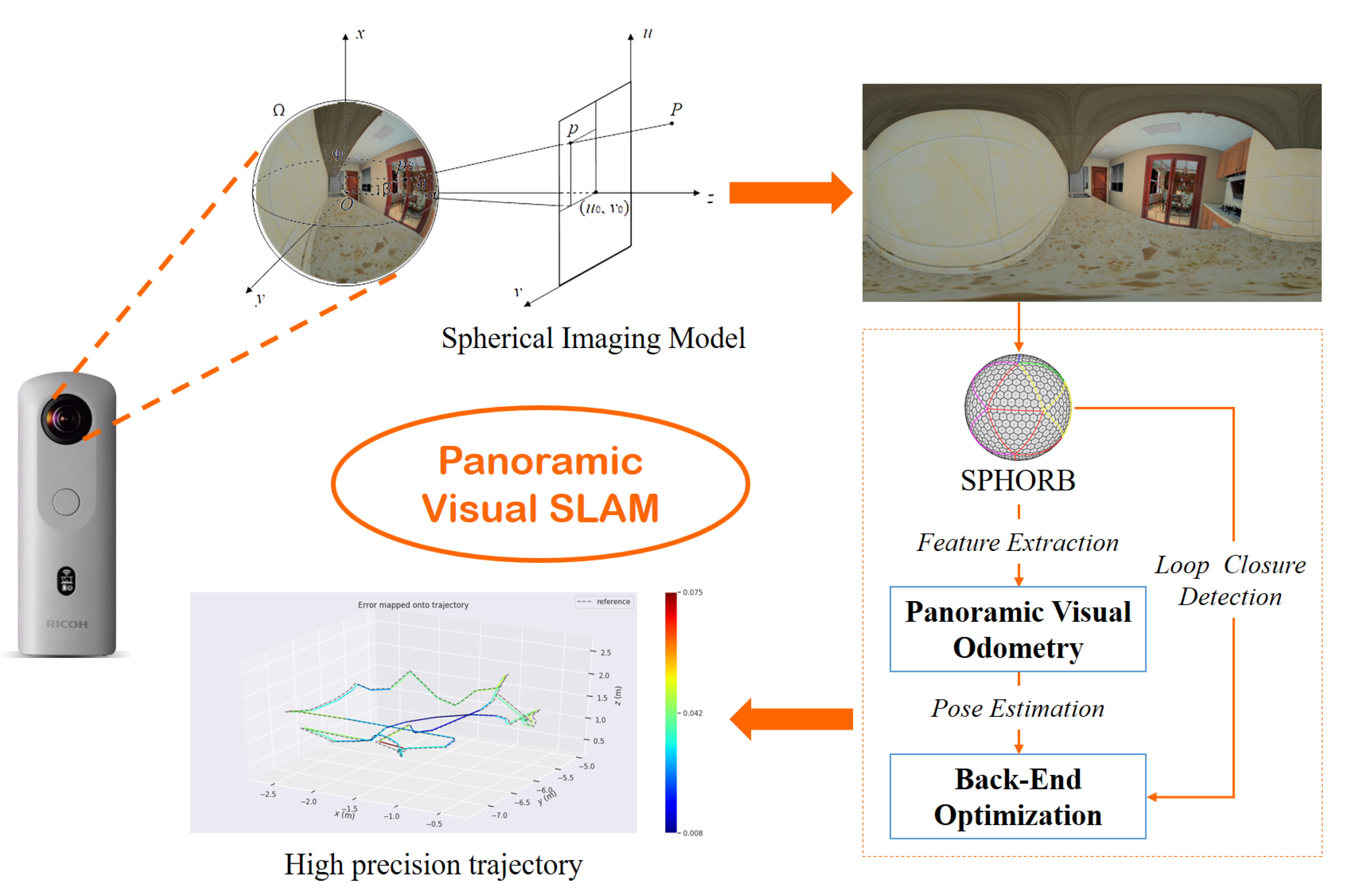
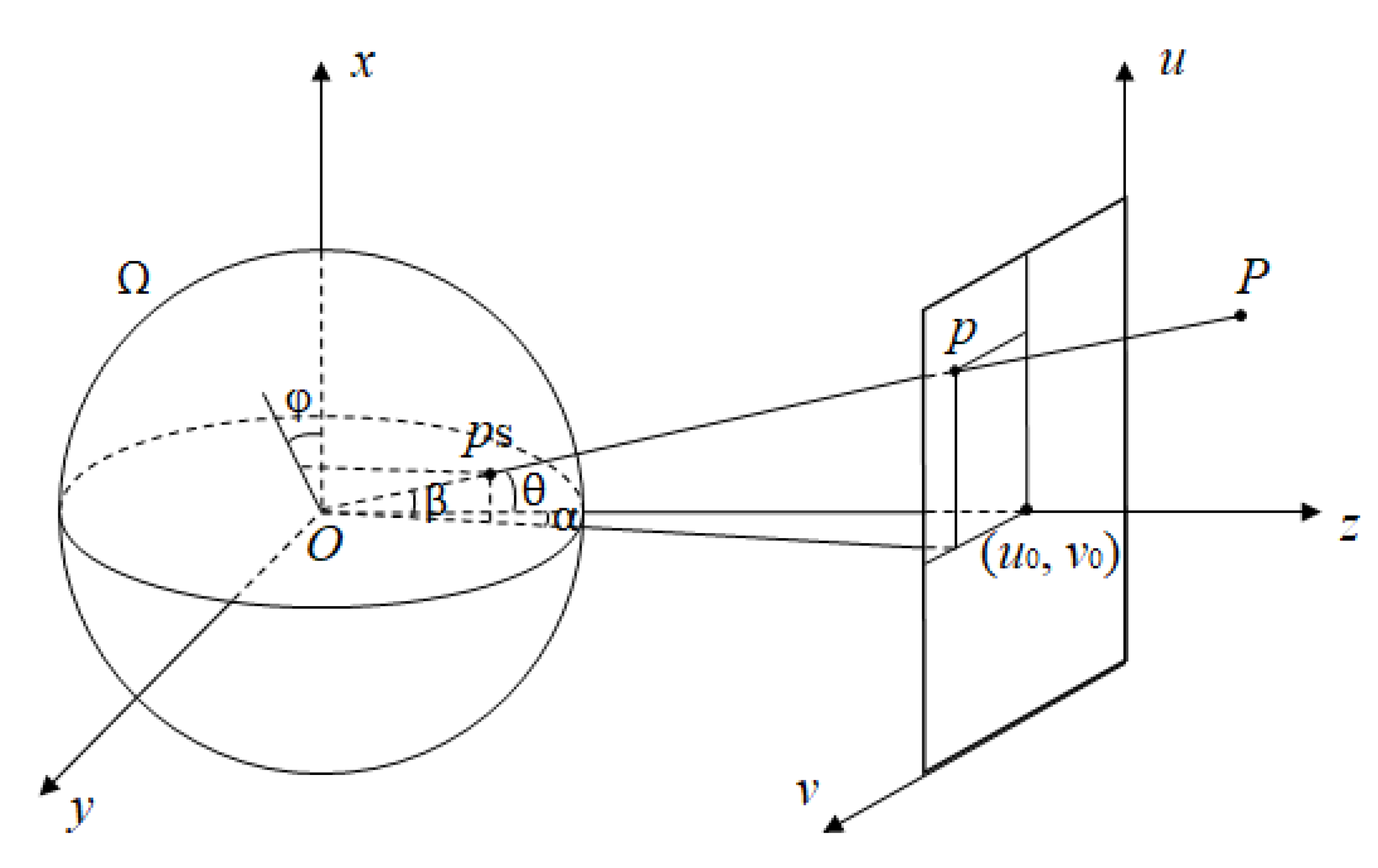
- The panoramic imaging model. We study the pixel expression method for spherical images, and derive the formula between the pixel coordinates and camera coordinates.
- (2)
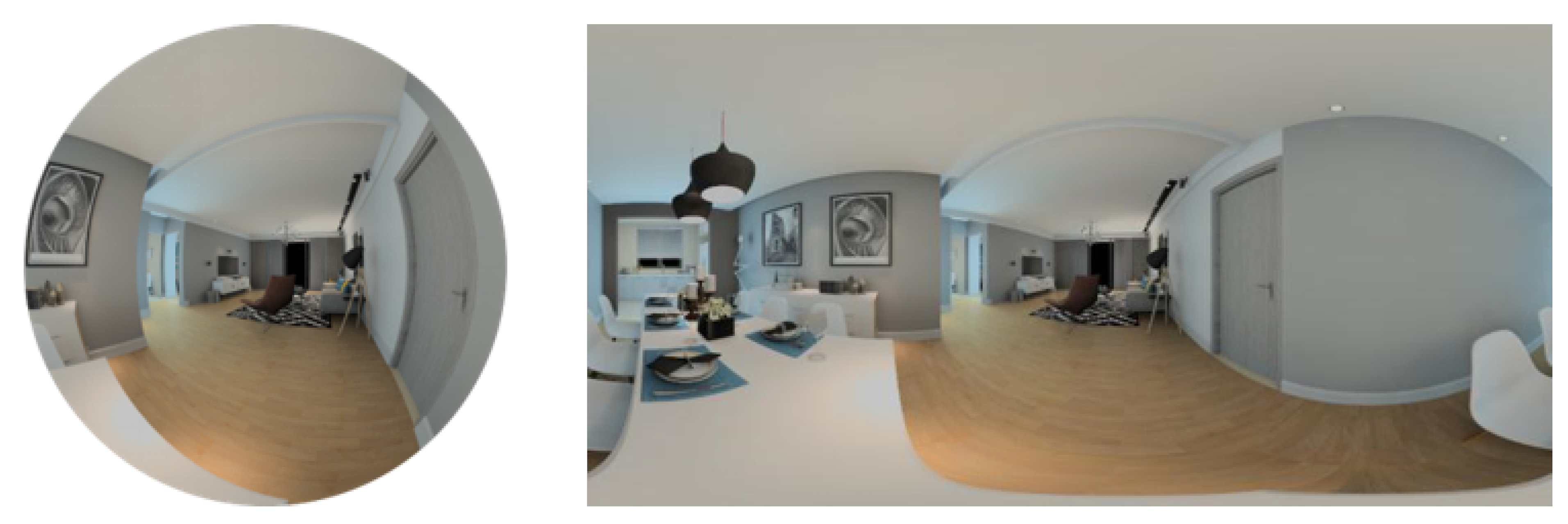
- Feature extraction and matching of panoramic images. Because panoramic images are seriously distorted and the imaging model differs from that of an ordinary monocular camera, we compare and analyze the feature extraction effects of various algorithms. The Spherical Oriented FAST and Rotated BRIEF (SPHORB) feature extraction algorithm is identified as being the most suitable for a panoramic visual SLAM positioning system. In addition, we propose improvements to the scale-invariant feature transform (SIFT) algorithm, and realize binary SIFT and ternary SIFT. These improvements to SIFT greatly increase the speed of SIFT while ensuring sufficient accuracy.
- (3)
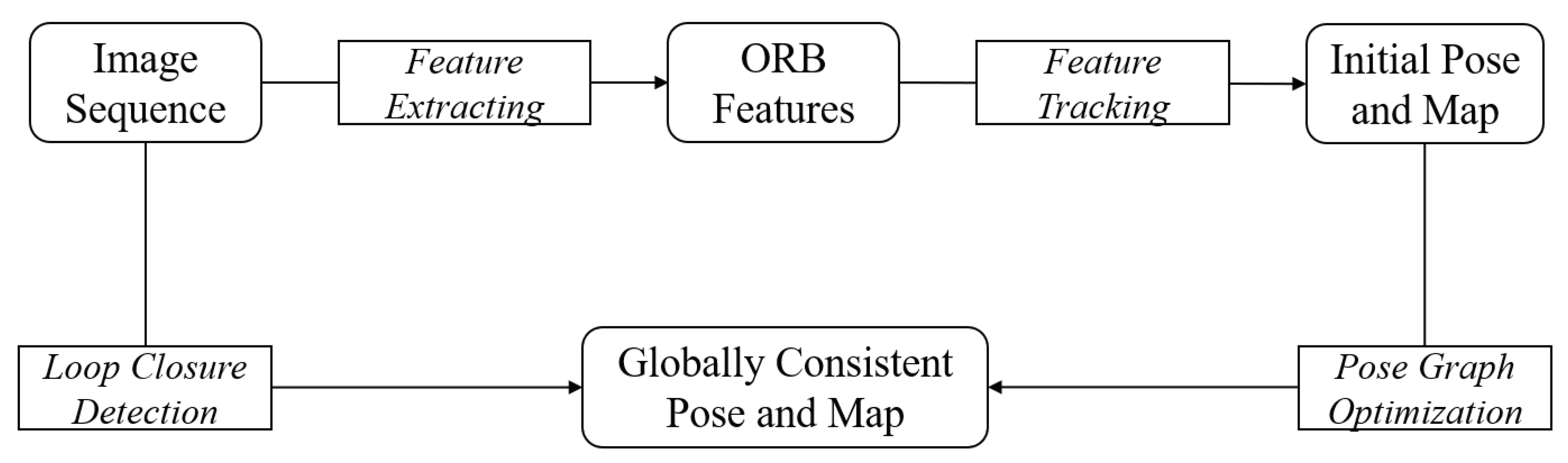
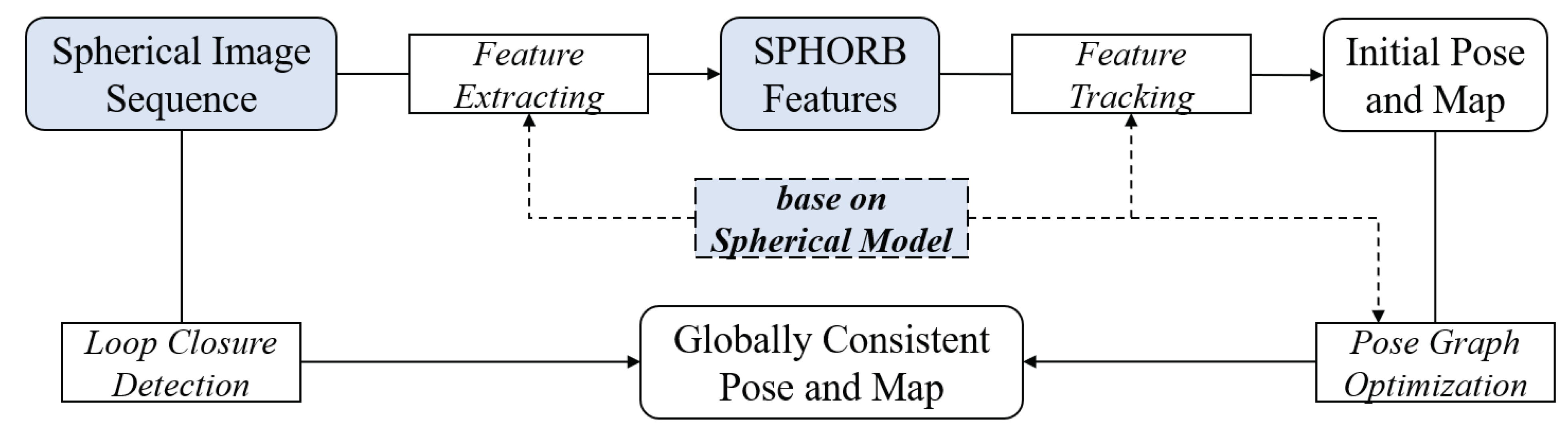
- Research into a SLAM algorithm for panoramic vision and the implementation of a location system. The ORB-SLAM2 [6] algorithm is improved, via front-end odometry and back-end optimization, to realize a SLAM positioning system that is suitable for panoramic vision.
3. Overview of Our Method
4. The Spherical Imaging Model
5. Feature Extraction and Matching of Spherical Images
6. The Panoramic Visual SLAM Algorithm
6.1. Front-End Visual Odometry
6.2. Back-End Optimization
7. Experiments and Analysis
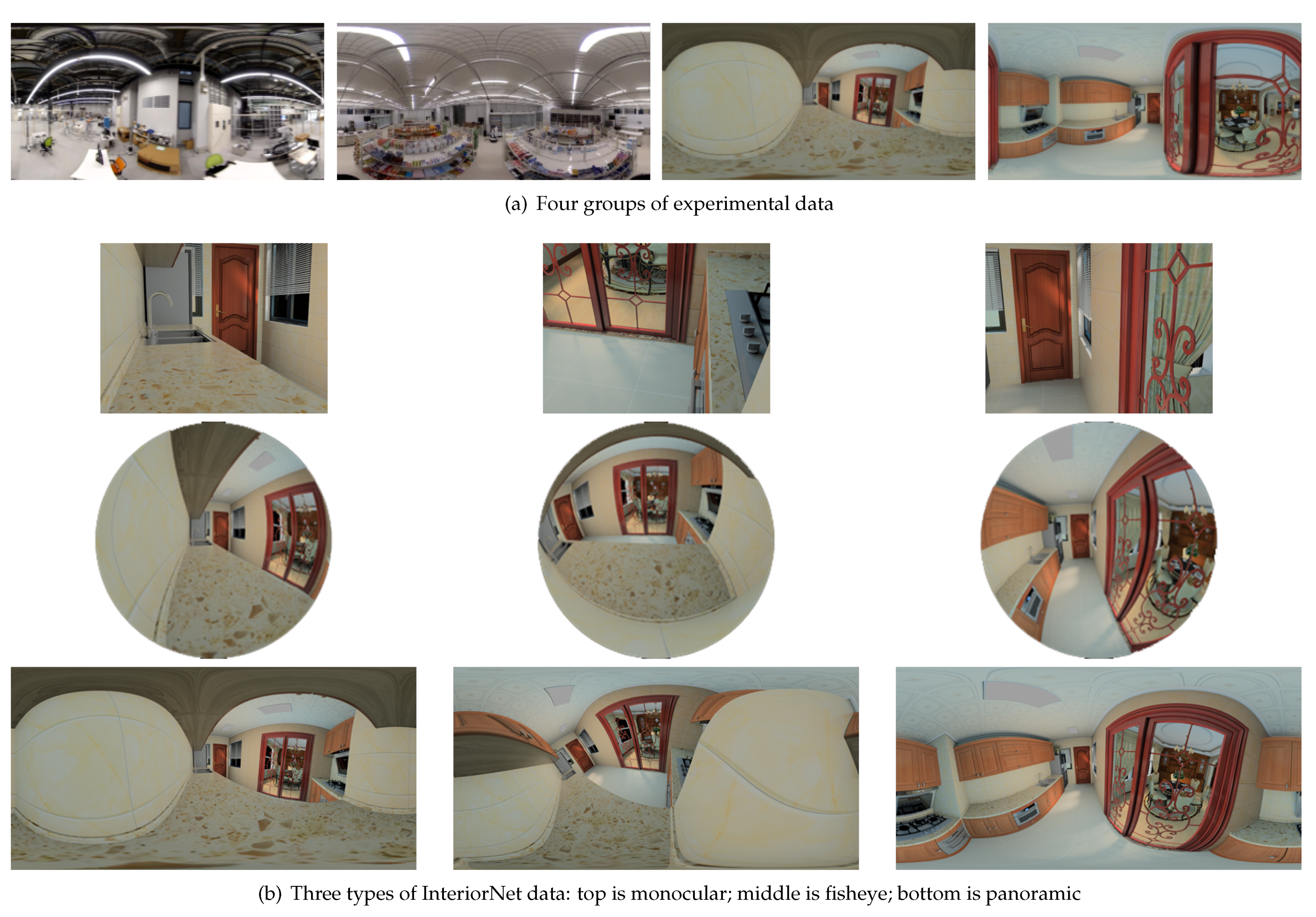
7.1. Experimental Data
7.2. Matching Experiment
7.2.1. SIFT, Binary SIFT, and Ternary SIFT
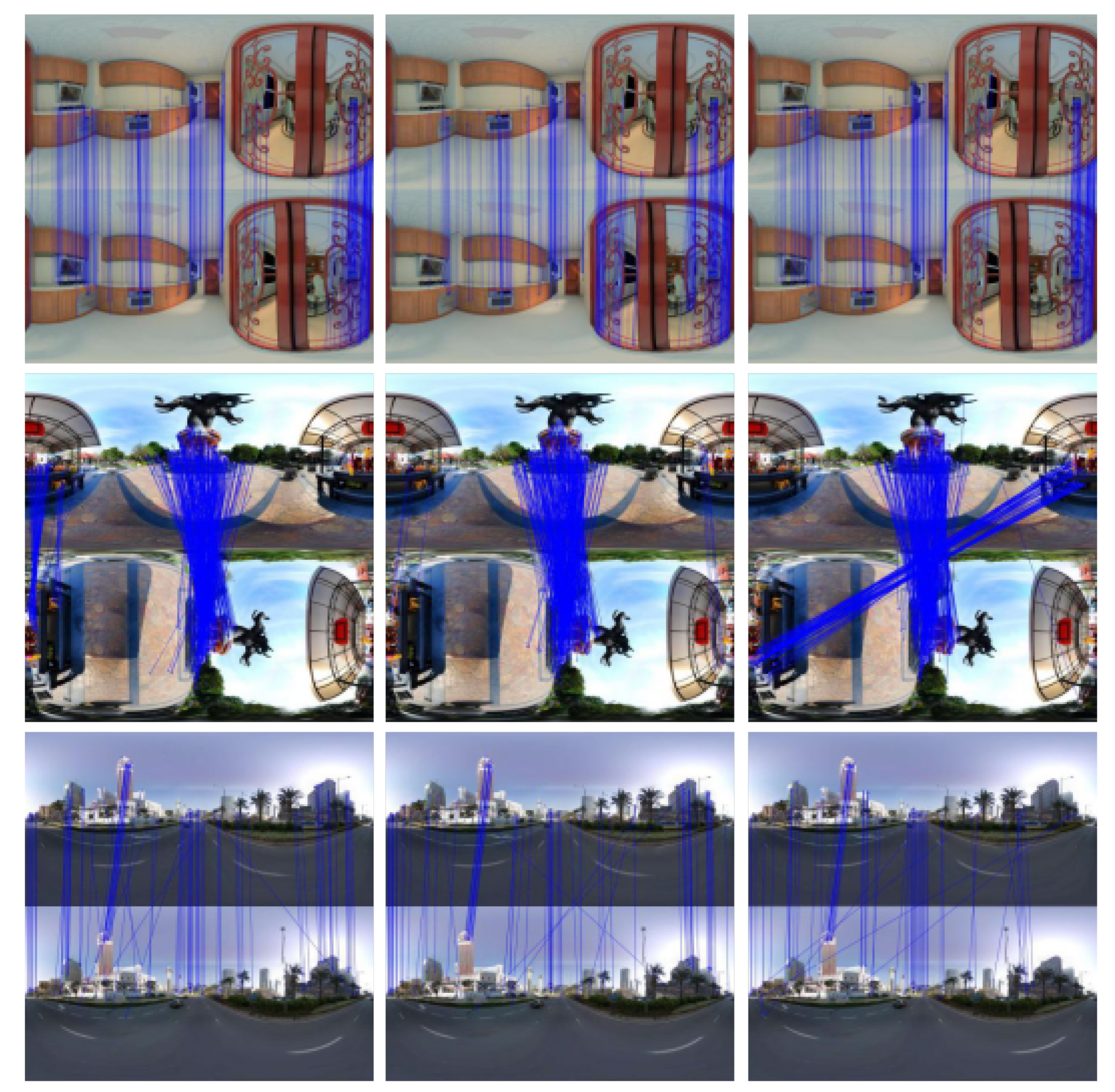
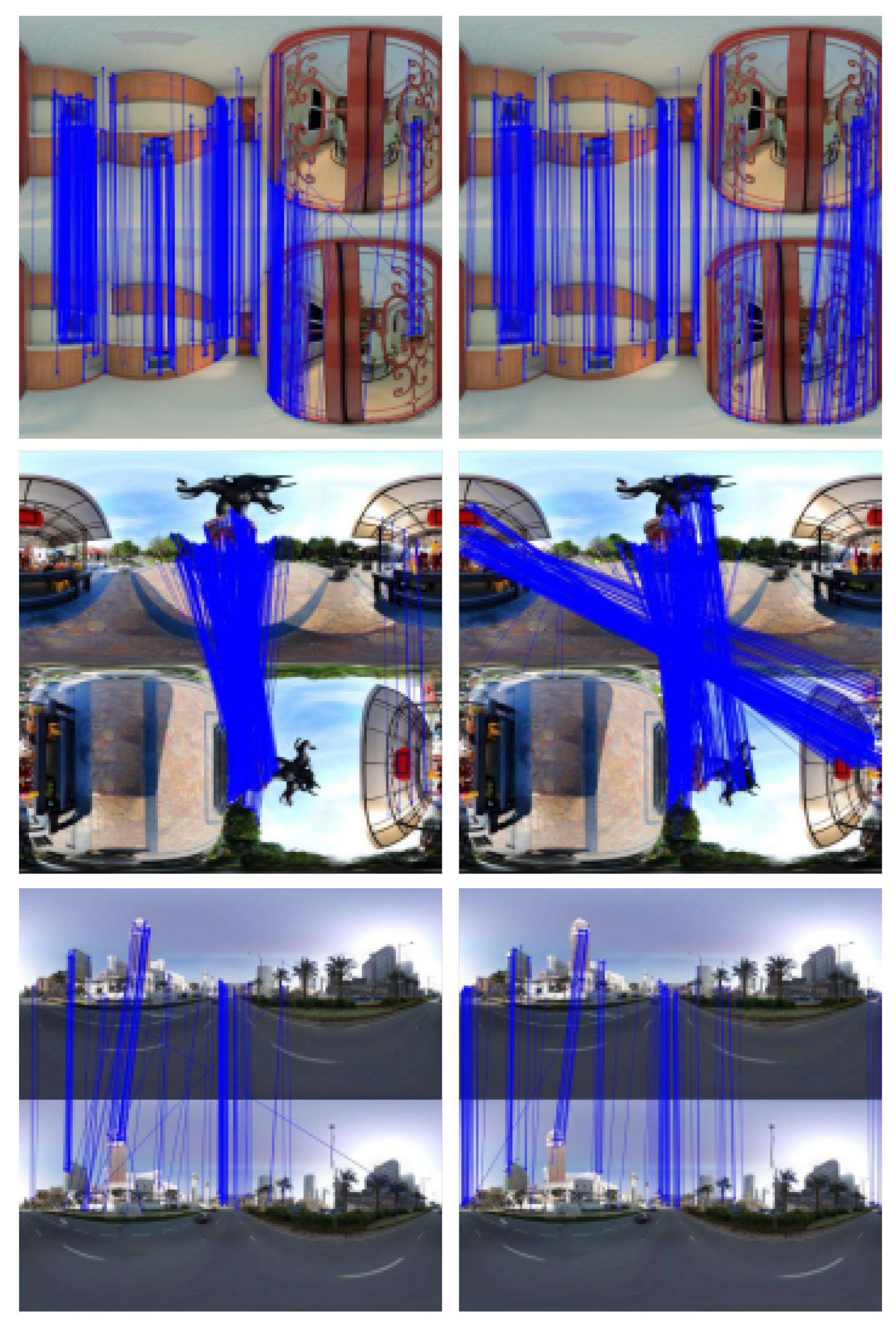
7.2.2. SPHORB and ORB
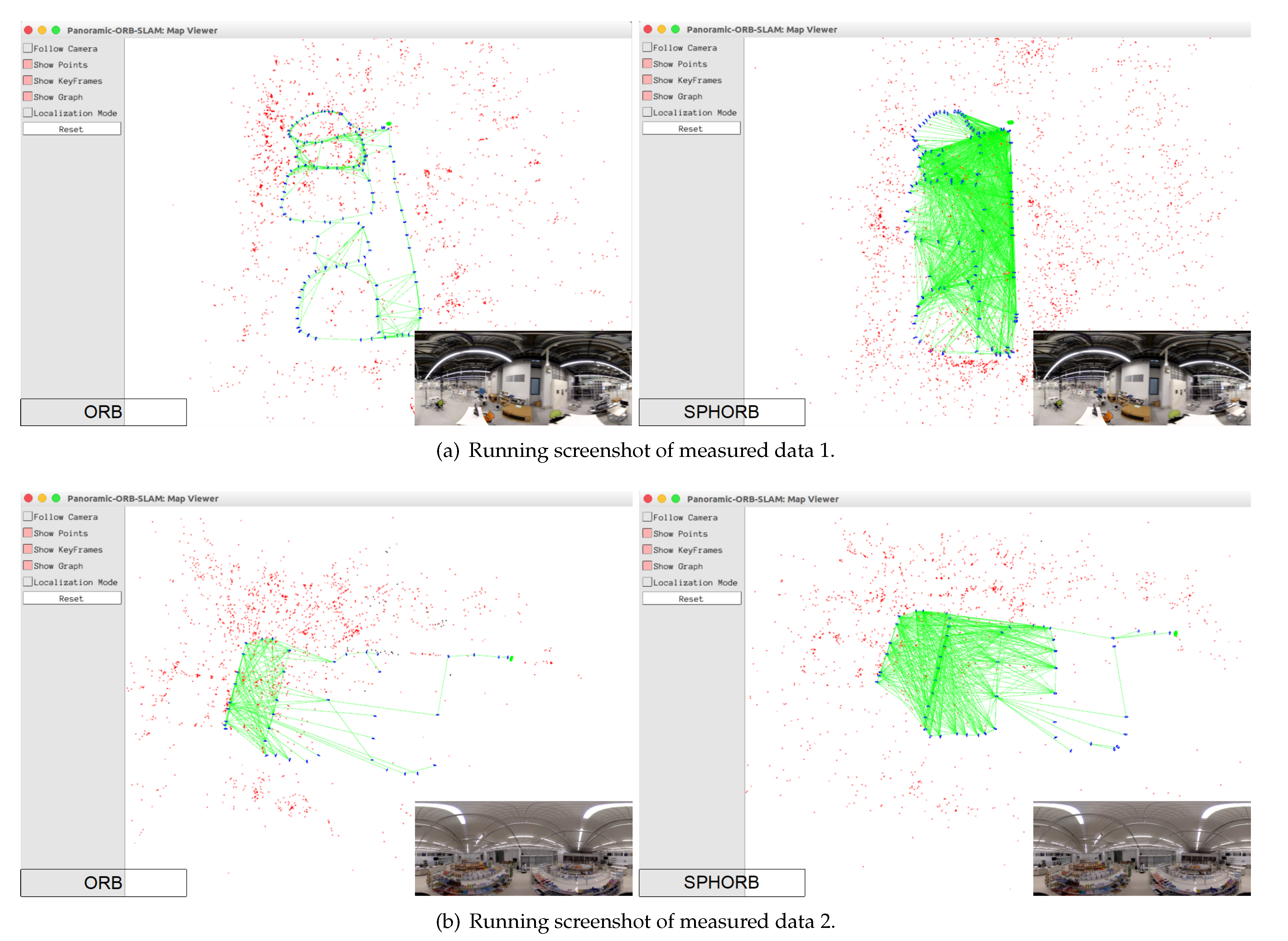
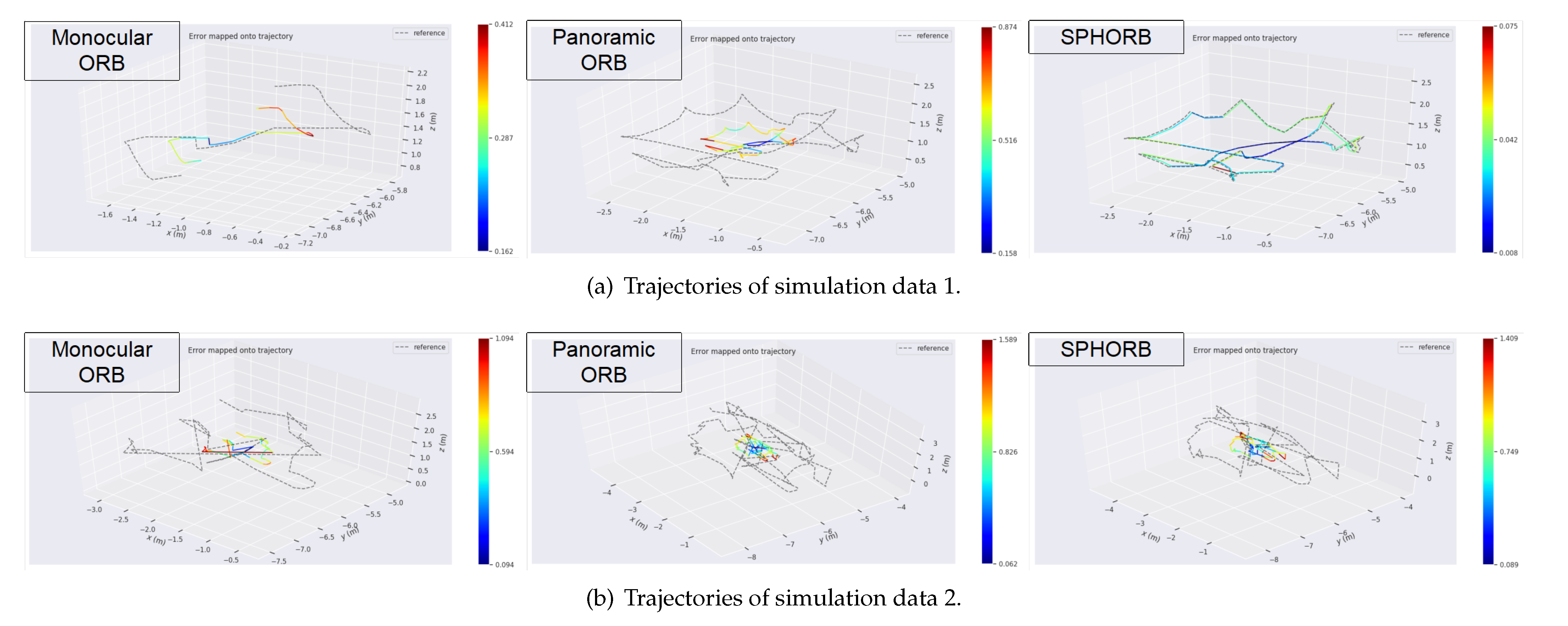
7.3. Panoramic Visual SLAM Experiment
8. Conclusions
- (1)
- For the spherical model, we compared the spherical surface to the Earth. The pixel coordinates on the sphere were expressed in latitude and longitude. The equations derived by this method are concise and easy to understand, which provides convenience for the back-end optimization part of panoramic SLAM.
- (2)
- Experiments show that most of the time, ternary SIFT outperforms binary SIFT and SIFT in accuracy and efficiency. The precision of ternary SIFT is slightly less than SIFT only when the number of feature points is very small (i.e., less than 500), but this is acceptable.
- (3)
- Spherical images have a higher resolution and more feature points, which has greater advantages than monocular images. However, the distortion of spherical images is serious. After weighing the relationship between accuracy and speed, it was found that the SPHORB algorithm is the most suitable among the feature extraction and matching algorithms mentioned in this paper for panoramic visual SLAM positioning systems.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Wang, Y. Research on Simultaneous Positioning and Map Creation Method of Mobile Robot Based on Panoramic Vision. Ph.D. Thesis, Harbin Engineering School, Harbin, China, 2010. [Google Scholar]
- Davison, A.J.; Murray, D.W. Mobile robot localisation using active vision. In Proceedings of the 5th European Conference on Computer Vision, Freiburg, Germany, 2–6 June 1998. [Google Scholar]
- Davison, A.J.; Reid, I.D.; Molton, N.D.; Stasse, O. MonoSLAM: Real-time single camera SLAM. IEEE Trans. Pattern Anal. Mach. Intell. 2007, 29, 1052–1067. [Google Scholar] [CrossRef] [PubMed]
- Klein, G.; Murray, D. Parallel tracking and mapping for small AR workspaces. In Proceedings of the 2007 6th IEEE and ACM International Symposium on Mixed and Augmented Reality, Nara, Japan, 13–16 November 2007; pp. 225–234. [Google Scholar]
- Mur-Artal, R.; Montiel, J.M.M.; Tardos, J.D. ORB-SLAM: A Versatile and Accurate Monocular SLAM System. IEEE Trans. Robot. 2015, 31, 1147–1163. [Google Scholar] [CrossRef]
- Mur-Artal, R.; Tardós, J.D. Orb-slam2: An open-source slam system for monocular, stereo, and rgb-d cameras. IEEE Trans. Robot. 2017, 33, 1255–1262. [Google Scholar] [CrossRef]
- Pumarola, A.; Vakhitov, A.; Agudo, A.; Sanfeliu, A.; Moreno-Noguer, F. PL-SLAM: Real-time monocular visual SLAM with points and lines. In Proceedings of the 2017 IEEE International Conference on Robotics and Automation (ICRA), Singapore, 29 May–3 June 2017; pp. 4503–4508. [Google Scholar]
- Gomez-Ojeda, R.; Moreno, F.A.; Zuñiga-Noël, D.; Scaramuzza, D.; Gonzalez-Jimenez, J. PL-SLAM: A stereo SLAM system through the combination of points and line segments. IEEE Trans. Robot. 2019, 35, 734–746. [Google Scholar] [CrossRef]
- Liu, S.; Guo, P.; Feng, L.; Yang, A. Accurate and Robust Monocular SLAM with Omnidirectional Cameras. Sensors 2019, 19, 4494. [Google Scholar] [CrossRef] [PubMed]
- Urban, S.; Hinz, S. MultiCol-SLAM-a modular real-time multi-camera slam system. arXiv 2016, arXiv:1610.07336. [Google Scholar]
- Engel, J.; Schöps, T.; Cremers, D. LSD-SLAM: Large-scale direct monocular SLAM. In Proceedings of the European Conference on Computer Vision, Zurich, Switzerland, 6–12 September 2014; pp. 834–849. [Google Scholar]
- Engel, J.; Koltun, V.; Cremers, D. Direct sparse odometry. IEEE Trans. Pattern Anal. Mach. Intell. 2017, 40, 611–625. [Google Scholar] [CrossRef] [PubMed]
- Forster, C.; Pizzoli, M.; Scaramuzza, D. SVO: Fast semi-direct monocular visual odometry. In Proceedings of the 2014 IEEE International Conference on Robotics and Automation (ICRA), Hong Kong, China, 31 May–7 June 2014; pp. 15–22. [Google Scholar]
- Kangni, F.; Laganiere, R. Orientation and pose recovery from spherical panoramas. In Proceedings of the 2007 IEEE 11th International Conference on Computer Vision, Rio de Janeiro, Brazil, 14–20 October 2007; pp. 1–8. [Google Scholar]
- Triggs, B.; McLauchlan, P.F.; Hartley, R.I.; Fitzgibbon, A.W. Bundle adjustment—A modern synthesis. In Proceedings of the International Workshop on Vision Algorithms, Corfu, Greece, 21–22 September 1999; pp. 298–372. [Google Scholar]
- Geyer, C.; Daniilidis, K. Catadioptric camera calibration. In Proceedings of the Seventh IEEE International Conference on Computer Vision, Corfu, Greece, 20–25 September 1999; pp. 398–404. [Google Scholar]
- Ikeda, S.; Sato, T.; Yokoya, N. High-resolution panoramic movie generation from video streams acquired by an omnidirectional multi-camera system. In Proceedings of the IEEE International Conference on Multisensor Fusion and Integration for Intelligent Systems, Tokyo, Japan, 30 July–1 August 2003; pp. 155–160. [Google Scholar]
- Parian, J.A.; Gruen, A. A sensor model for panoramic cameras. In Proceedings of the 6th Optical 3D Measurement Techniques, Zurich, Switzerland, 22–25 September 2003; pp. 22–25. [Google Scholar]
- Sato, T.; Yokoya, N. Efficient hundreds-baseline stereo by counting interest points for moving omni-directional multi-camera system. J. Vis. Commun. Image Represent. 2010, 21, 416–426. [Google Scholar] [CrossRef]
- Rituerto, A.; Puig, L.; Guerrero, J.J. Visual slam with an omnidirectional camera. In Proceedings of the 2010 20th International Conference on Pattern Recognition, Istanbul, Turkey, 23–26 August 2010; pp. 348–351. [Google Scholar]
- Gutierrez, D.; Rituerto, A.; Montiel, J.; Guerrero, J.J. Adapting a real-time monocular visual slam from conventional to omnidirectional cameras. In Proceedings of the 2011 IEEE International Conference on Computer Vision Workshops (ICCV Workshops), Barcelona, Spain, 6–11 November 2011; pp. 343–350. [Google Scholar]
- Gamallo, C.; Mucientes, M.; Regueiro, C.V. Omnidirectional visual SLAM under severe occlusions. Robot. Auton. Syst. 2015, 65, 76–87. [Google Scholar] [CrossRef]
- Valiente, D.; Jadidi, M.G.; Miró, J.V.; Gil, A.; Reinoso, O. Information-based view initialization in visual SLAM with a single omnidirectional camera. Robot. Auton. Syst. 2015, 72, 93–104. [Google Scholar] [CrossRef]
- Valiente, D.; Gil, A.; Payá, L.; Sebastián, J.M.; Reinoso, Ó. Robust visual localization with dynamic uncertainty management in omnidirectional SLAM. Appl. Sci. 2017, 7, 1294. [Google Scholar] [CrossRef]
- Valiente, D.; Gil, A.; Reinoso, Ó.; Juliá, M.; Holloway, M. Improved omnidirectional odometry for a view-based mapping approach. Sensors 2017, 17, 325. [Google Scholar] [CrossRef]
- Li, J.; Wang, X.; Li, S. Spherical-model-based SLAM on full-view images for indoor environments. Appl. Sci. 2018, 8, 2268. [Google Scholar] [CrossRef]
- Seok, H.; Lim, J. Rovo: Robust omnidirectional visual odometry for wide-baseline wide-fov camera systems. In Proceedings of the 2019 International Conference on Robotics and Automation (ICRA), Montreal, QC, Canada, 20–24 May 2019; pp. 6344–6350. [Google Scholar]
- Campos, C.; Elvira, R.; Rodríguez, J.J.G.; Montiel, J.M.; Tardós, J.D. ORB-SLAM3: An accurate open-source library for visual, visual-inertial and multi-map SLAM. arXiv 2020, arXiv:2007.11898. [Google Scholar]
- Terabayashi, K.; Morita, T.; Okamoto, H.; Umeda, K. 3D Measurement Using a Fish-Eye Camera Based on EPI Analysis. J. Robot. Mechatron. 2012, 24, 677. [Google Scholar] [CrossRef]
- Ji, S.; Qin, Z.; Shan, J.; Lu, M. Panoramic SLAM from a multiple fisheye camera rig. ISPRS J. Photogramm. Remote. Sens. 2020, 159, 169–183. [Google Scholar] [CrossRef]
- Caruso, D.; Engel, J.; Cremers, D. Large-scale direct SLAM for omnidirectional cameras. In Proceedings of the 2015 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Hamburg, Germany, 28 September–2 October 2015; pp. 141–148. [Google Scholar]
- Liu, P.; Heng, L.; Sattler, T.; Geiger, A.; Pollefeys, M. Direct visual odometry for a fisheye-stereo camera. In Proceedings of the 2017 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Vancouver, BC, Canada, 24–28 September 2017; pp. 1746–1752. [Google Scholar]
- Matsuki, H.; von Stumberg, L.; Usenko, V.; Stückler, J.; Cremers, D. Omnidirectional DSO: Direct sparse odometry with fisheye cameras. IEEE Robot. Autom. Lett. 2018, 3, 3693–3700. [Google Scholar] [CrossRef]
- Forster, C.; Zhang, Z.; Gassner, M.; Werlberger, M.; Scaramuzza, D. SVO: Semidirect visual odometry for monocular and multicamera systems. IEEE Trans. Robot. 2016, 33, 249–265. [Google Scholar] [CrossRef]
- Heng, L.; Choi, B. Semi-direct visual odometry for a fisheye-stereo camera. In Proceedings of the 2016 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Daejeon, Korea, 9–14 October 2016; pp. 4077–4084. [Google Scholar]
- Sumikura, S.; Shibuya, M.; Sakurada, K. OpenVSLAM: A versatile visual slam framework. In Proceedings of the 27th ACM International Conference on Multimedia, Nice, France, 21–25 October 2019; pp. 2292–2295. [Google Scholar]
- Zhang, Z.; Rebecq, H.; Forster, C.; Scaramuzza, D. Benefit of large field-of-view cameras for visual odometry. In Proceedings of the 2016 IEEE International Conference on Robotics and Automation (ICRA), Stockholm, Sweden, 16–21 May 2016; pp. 801–808. [Google Scholar]
- Li, W.; Saeedi, S.; McCormac, J.; Clark, R.; Tzoumanikas, D.; Ye, Q.; Huang, Y.; Tang, R.; Leutenegger, S. InteriorNet: Mega-Scale Multi-Sensor Photo-Realistic Indoor Scenes Dataset. 2019. Available online: https://interiornet.org/ (accessed on 14 October 2019).
- Kümmerle, R.; Grisetti, G.; Strasdat, H.; Konolige, K.; Burgard, W. g2o: A general framework for graph optimization. In Proceedings of the 2011 IEEE International Conference on Robotics and Automation, Shanghai, China, 9–13 May 2011; pp. 3607–3613. [Google Scholar]
- Geyer, C.; Daniilidis, K. A unifying theory for central panoramic systems and practical implications. In Proceedings of the European Conference on Computer Vision, Antibes, France, 11–14 May 2000; pp. 445–461. [Google Scholar]
- Barreto, J.P.; Araujo, H. Issues on the geometry of central catadioptric image formation. In Proceedings of the 2001 IEEE Computer Society Conference on Computer Vision and Pattern Recognition, Kauai, HI, USA, 8–14 December 2001. [Google Scholar]
- Khomutenko, B.; Garcia, G.; Martinet, P. An enhanced unified camera model. IEEE Robot. Autom. Lett. 2015, 1, 137–144. [Google Scholar] [CrossRef]
- Usenko, V.; Demmel, N.; Cremers, D. The double sphere camera model. In Proceedings of the 2018 International Conference on 3D Vision (3DV), Verona, Italy, 5–8 September 2018; pp. 552–560. [Google Scholar]
- Cruz-Mota, J.; Bogdanova, I.; Paquier, B.; Bierlaire, M.; Thiran, J.P. Scale Invariant Feature Transform on the Sphere: Theory and Applications. Int. J. Comput. Vis. 2012, 98, 217–241. [Google Scholar] [CrossRef]
- Ke, Y.; Sukthankar, R. PCA-SIFT: A more distinctive representation for local image descriptors. In Proceedings of the 2004 IEEE Computer Society Conference on Computer Vision and Pattern Recognition, Washington, DC, USA, 27 June–2 July 2004; pp. 506–513. [Google Scholar]
- Rublee, E.; Rabaud, V.; Konolige, K.; Bradski, G. ORB: An efficient alternative to SIFT or SURF. In Proceedings of the 2011 IEEE International Conference on Computer Vision (ICCV), Barcelona, Spain, 6–13 November 2011; pp. 2564–2571. [Google Scholar]
- Gao, X.; Zhang, T. Visual SLAM 14 Lectures from Theory to Practice; Electronic Industry Press: Beijing, China, 2017. [Google Scholar]
- Grupp, M. evo: Python Package for the Evaluation of Odometry and SLAM. Available online: https://github.com/MichaelGrupp/evo (accessed on 24 January 2020).












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Data Type | Matching Method | Rough Matching Number | Fine Matching Number | Fine Matching Rate | Matching Time (s) |
|---|---|---|---|---|---|
| Group 1 (Indoor, More Feature Points) | SIFT | 1196 | 475 | 39.72% | 1.104 |
| binary SIFT | 1212 | 460 | 37.95% | 0.731 | |
| ternary SIFT | 1075 | 439 | 40.84% | 0.698 | |
| Group 2 (Rotate 90 degrees) | SIFT | 1397 | 365 | 26.13% | 1.578 |
| binary SIFT | 1403 | 354 | 25.23% | 1.007 | |
| ternary SIFT | 1295 | 389 | 30.04% | 0.979 | |
| Group 3 (Outdoor, Fewer Feature Points) | SIFT | 191 | 92 | 48.17% | 0.319 |
| binary SIFT | 267 | 82 | 30.71% | 0.224 | |
| ternary SIFT | 196 | 68 | 34.69% | 0.214 |
| Data Type | Matching Method | Rough Matching Number | Fine Matching Number | Fine Matching Rate | Matching Time (s) |
|---|---|---|---|---|---|
| Group 1 (Indoor, More Feature Points) | ORB | 1458 | 978 | 67.08% | 1.868 |
| SPHORB | 1323 | 826 | 62.43% | 1.895 | |
| Group 2 (Rotate 90 degrees) | ORB | 2162 | 1190 | 55.04% | 3.791 |
| SPHORB | 4860 | 1208 | 24.86% | 4.099 | |
| Group 3 (Outdoor, Fewer Feature Points) | ORB | 350 | 166 | 47.43% | 3.263 |
| SPHORB | 267 | 165 | 61.80% | 3.695 |
| Data Type | Matching Method | Initial Frame ID | Mean Matches Per Frame | Mean Time Per Frame (s) |
|---|---|---|---|---|
| Measured Data 1 | ORB | 108 | 191 | 0.102 |
| SPHORB | 11 | 329 | 0.483 | |
| Measured Data 2 | ORB | 238 | 150 | 0.102 |
| SPHORB | 204 | 204 | 0.49 |
| Data Type | Matching Method | Initial Frame ID | Mean Matches Per Frame | Mean Time Per Frame (s) | Lost Frame IDs |
|---|---|---|---|---|---|
| Simulation Data 1 | Monocular ORB | 12 | 236 | 0.027 | 167-876 |
| Panoramic ORB | 55 | 802 | 0.143 | None | |
| SPHORB | 4 | 855 | 0.525 | None | |
| Simulation Data 2 | Monocular ORB | 4 | 205 | 0.029 | 449-574, 692-873 |
| Panoramic ORB | 4 | 327 | 0.12 | None | |
| SPHORB | 2 | 589 | 0.484 | None |
| Data Type | Matching Method | Max | Mean | Min | Rmse | Std |
|---|---|---|---|---|---|---|
| Simulation Data 1 | Monocular ORB | ✗ | ✗ | ✗ | ✗ | ✗ |
| Panoramic ORB | 0.874 | 0.576 | 0.158 | 0.597 | 0.155 | |
| SPHORB | 0.075 | 0.035 | 0.008 | 0.036 | 0.011 | |
| Simulation Data 2 | Monocular ORB | ✗ | ✗ | ✗ | ✗ | ✗ |
| Panoramic ORB | 1.589 | 0.868 | 0.062 | 0.937 | 0.354 | |
| SPHORB | 1.409 | 0.825 | 0.089 | 0.885 | 0.319 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, Y.; Huang, F. Panoramic Visual SLAM Technology for Spherical Images. Sensors 2021, 21, 705. https://doi.org/10.3390/s21030705
Zhang Y, Huang F. Panoramic Visual SLAM Technology for Spherical Images. Sensors. 2021; 21(3):705. https://doi.org/10.3390/s21030705
Chicago/Turabian StyleZhang, Yi, and Fei Huang. 2021. "Panoramic Visual SLAM Technology for Spherical Images" Sensors 21, no. 3: 705. https://doi.org/10.3390/s21030705
APA StyleZhang, Y., & Huang, F. (2021). Panoramic Visual SLAM Technology for Spherical Images. Sensors, 21(3), 705. https://doi.org/10.3390/s21030705