
A Decentralized Sensor Fusion Scheme for Multi Sensorial Fault Resilient Pose Estimation

 , , and
, , and 
Abstract
:1. Introduction
2. Problem Formulation
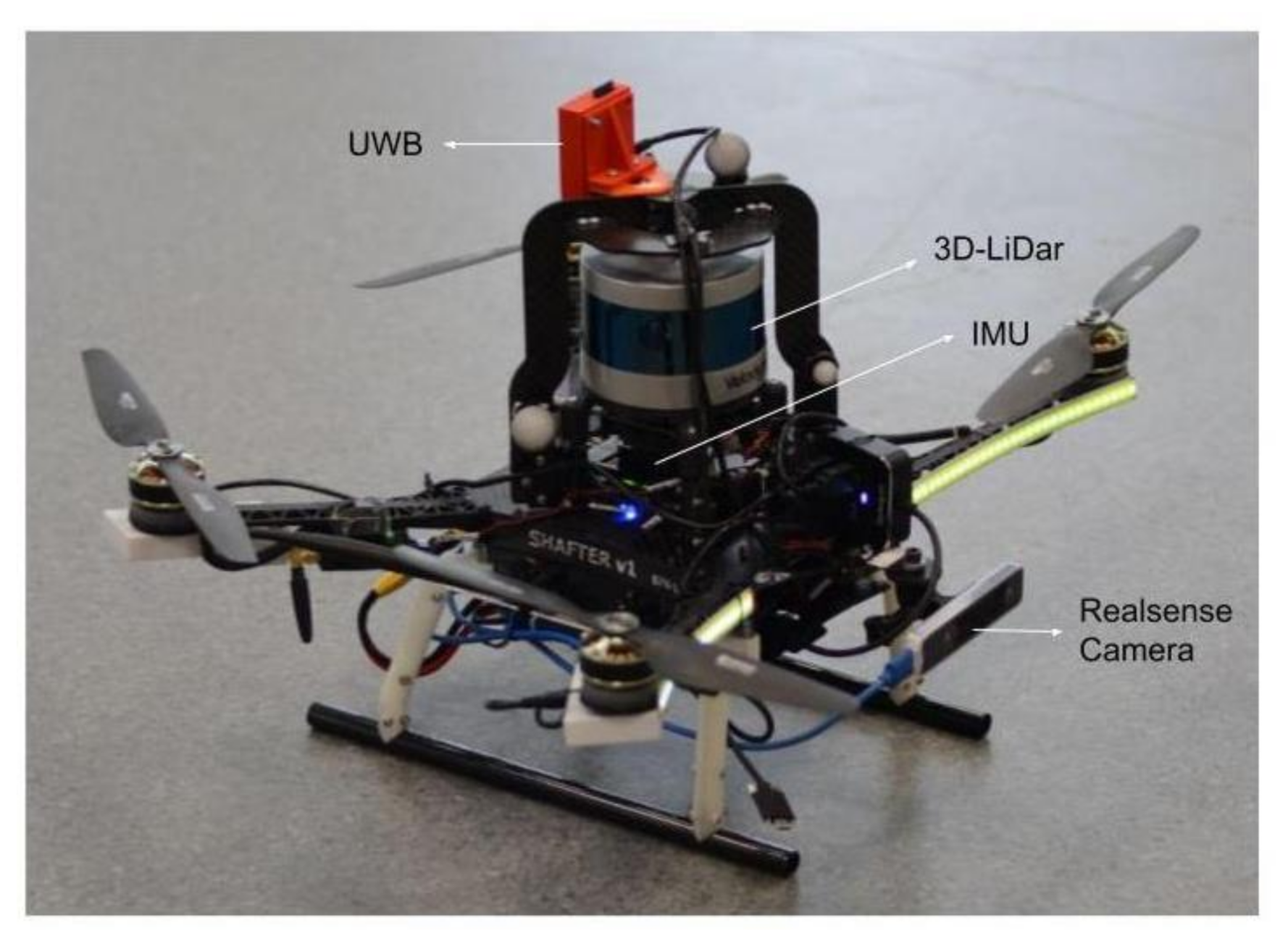
2.1. Asynchronous Sensors Associated with the Present Study
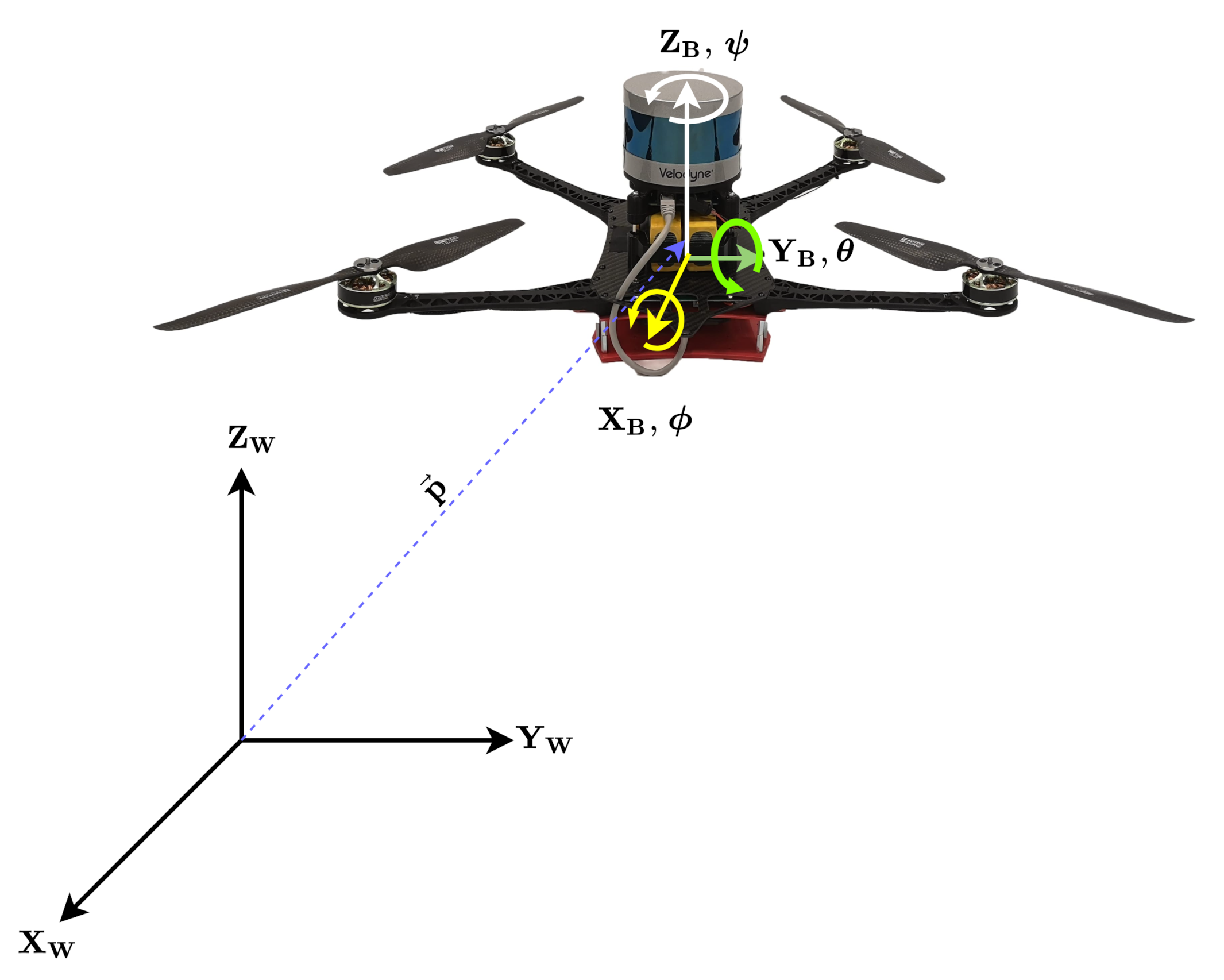
2.2. The MAV’s Utilized Kinematic Model
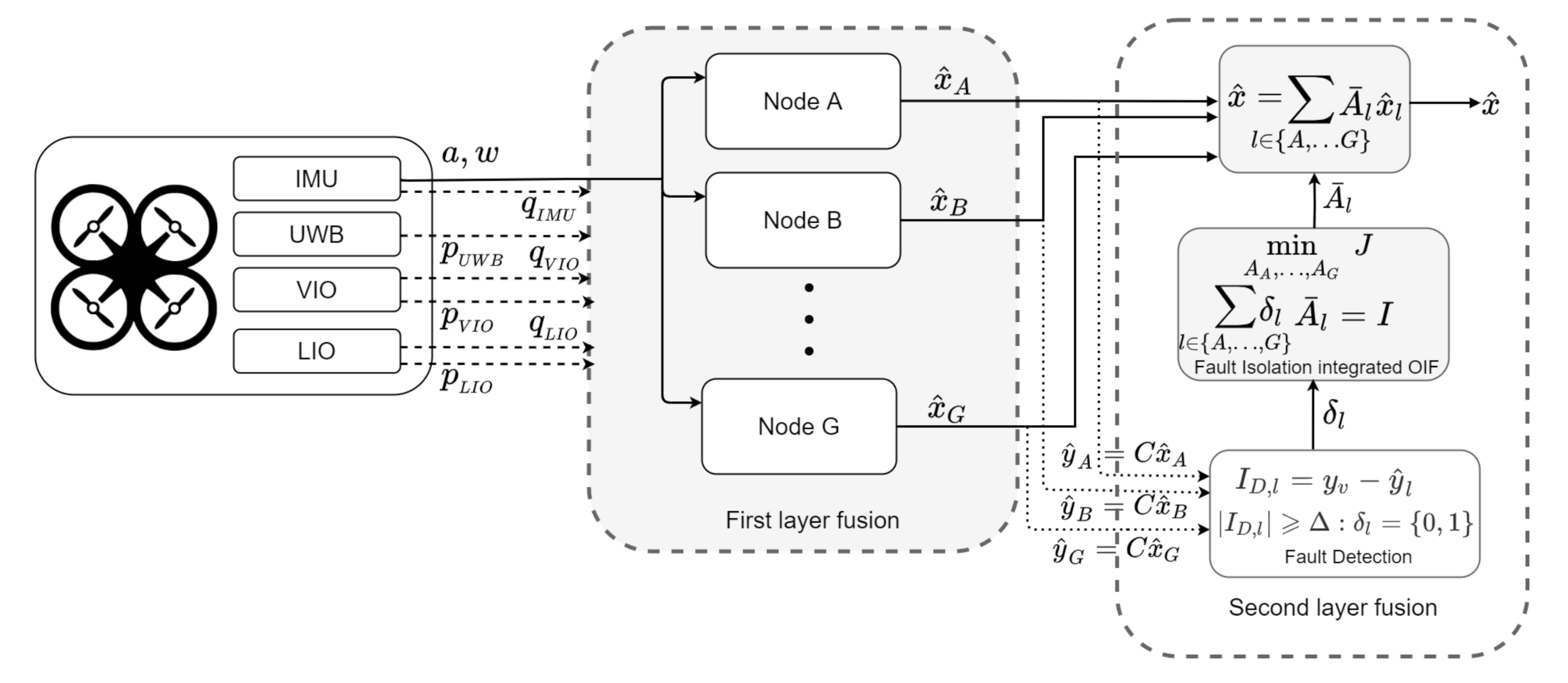
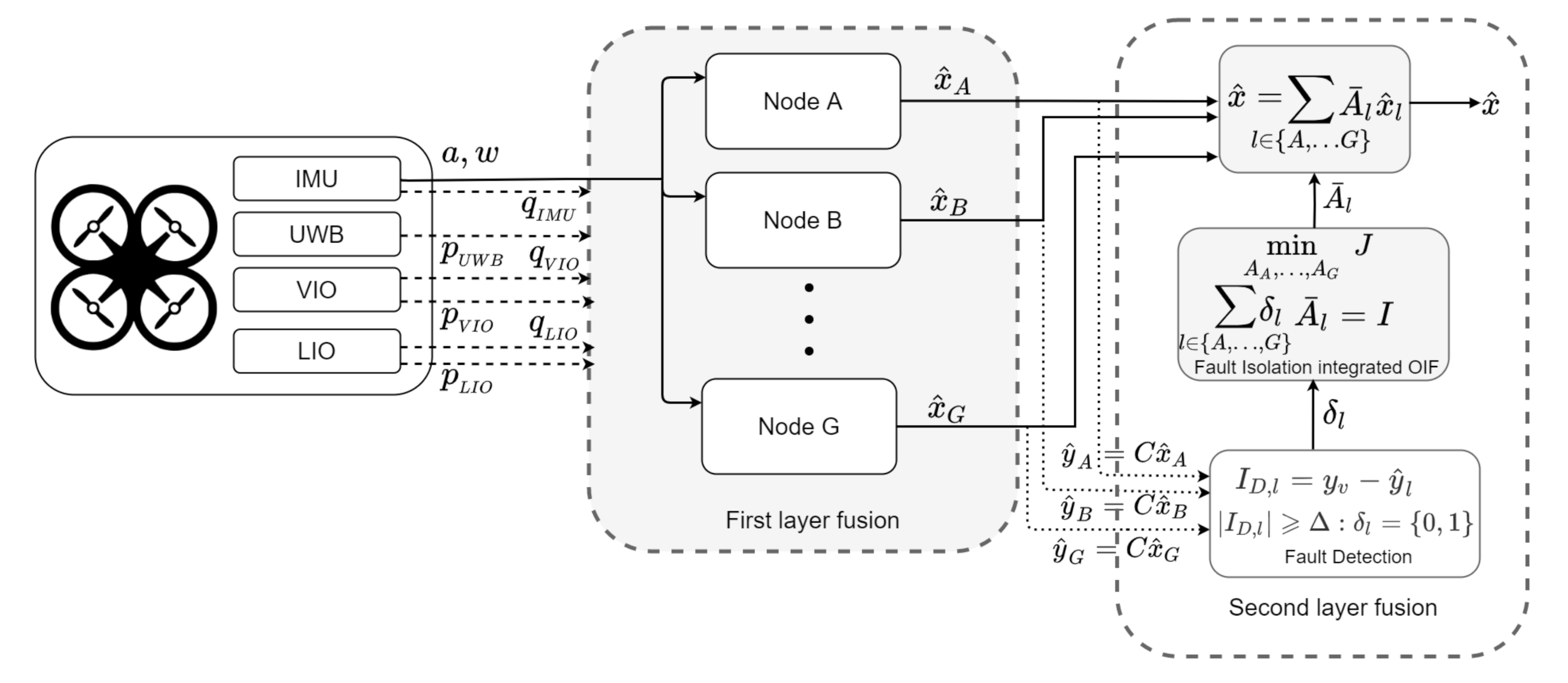
3. Decentralized Sensor Fusion Architecture
3.1. First Layered Decentralized Fusion Architecture

3.2. Second Layer Decentralized Fusion Architecture
Fault Detection
4. Experimental Framework Evaluation
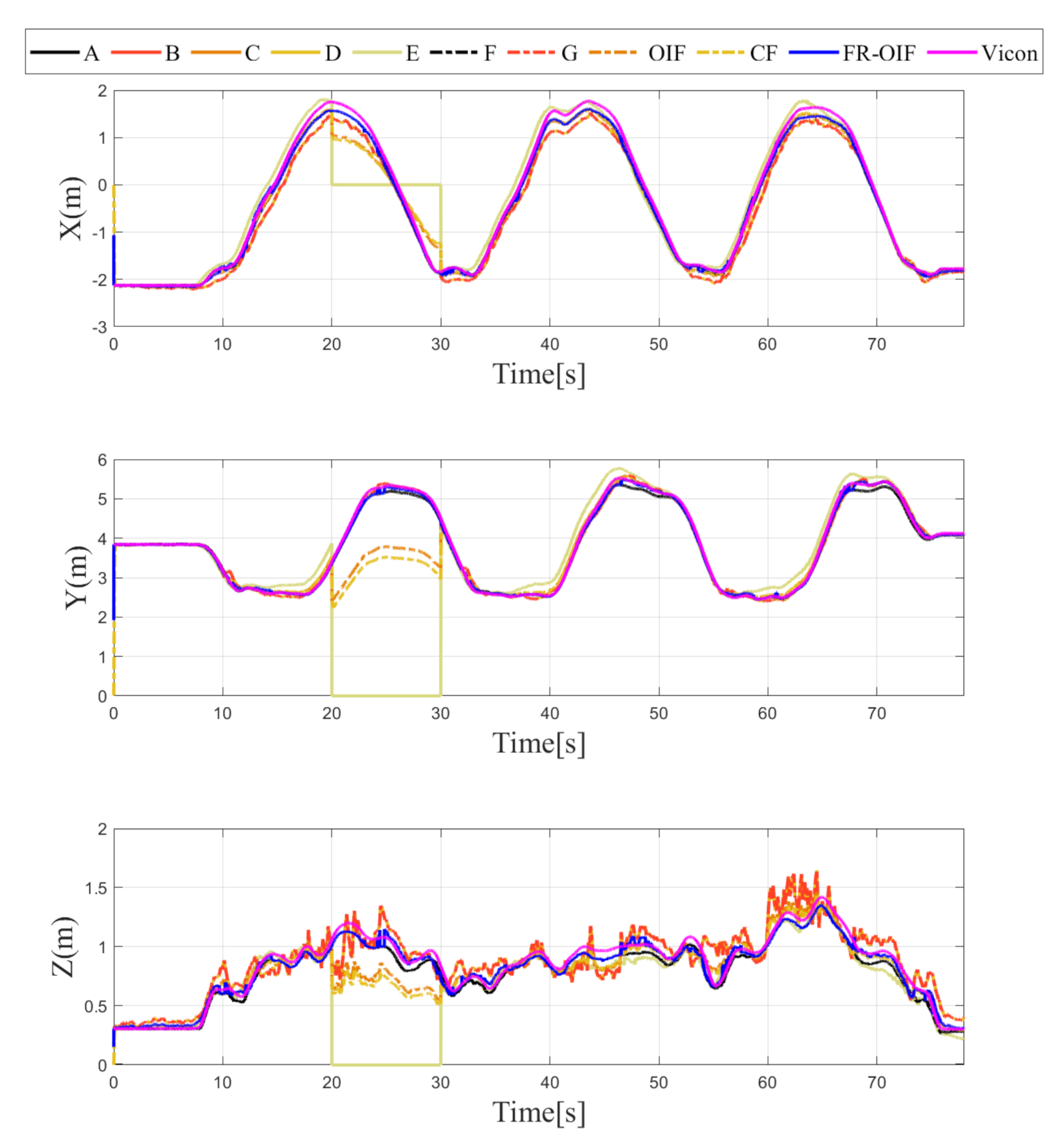
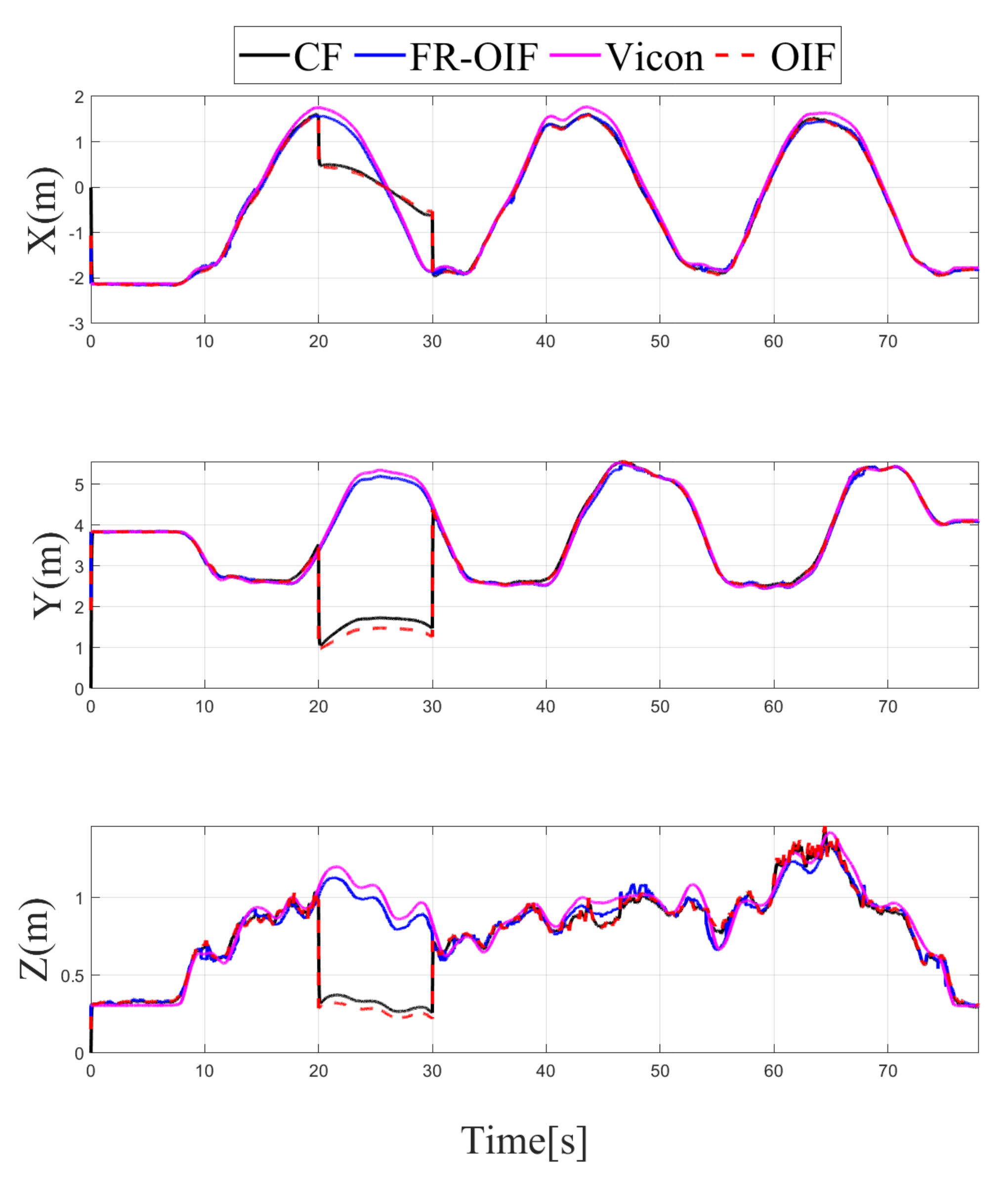
- Case-1: Temporal fault only in LIO measurement in between (20–30) s, while measurement from all other sensors are unaltered.
- Case-2: Temporal fault only in VIO measurement in between (50–60) s, while measurement from all other sensors are unaltered.
- Case-3: Temporal fault in both LIO and UWB measurements are itroduced in different operating points. The UWB measurement is faulty during (20–30) s, whereas for LIO reports faulty data during (35–45) s. Hence, this case evaluates multiple faults from different sensors in separate operating point.
- Case-4: Simultaneous temporal failure of LIO and UWB appeared during (20–30) s.
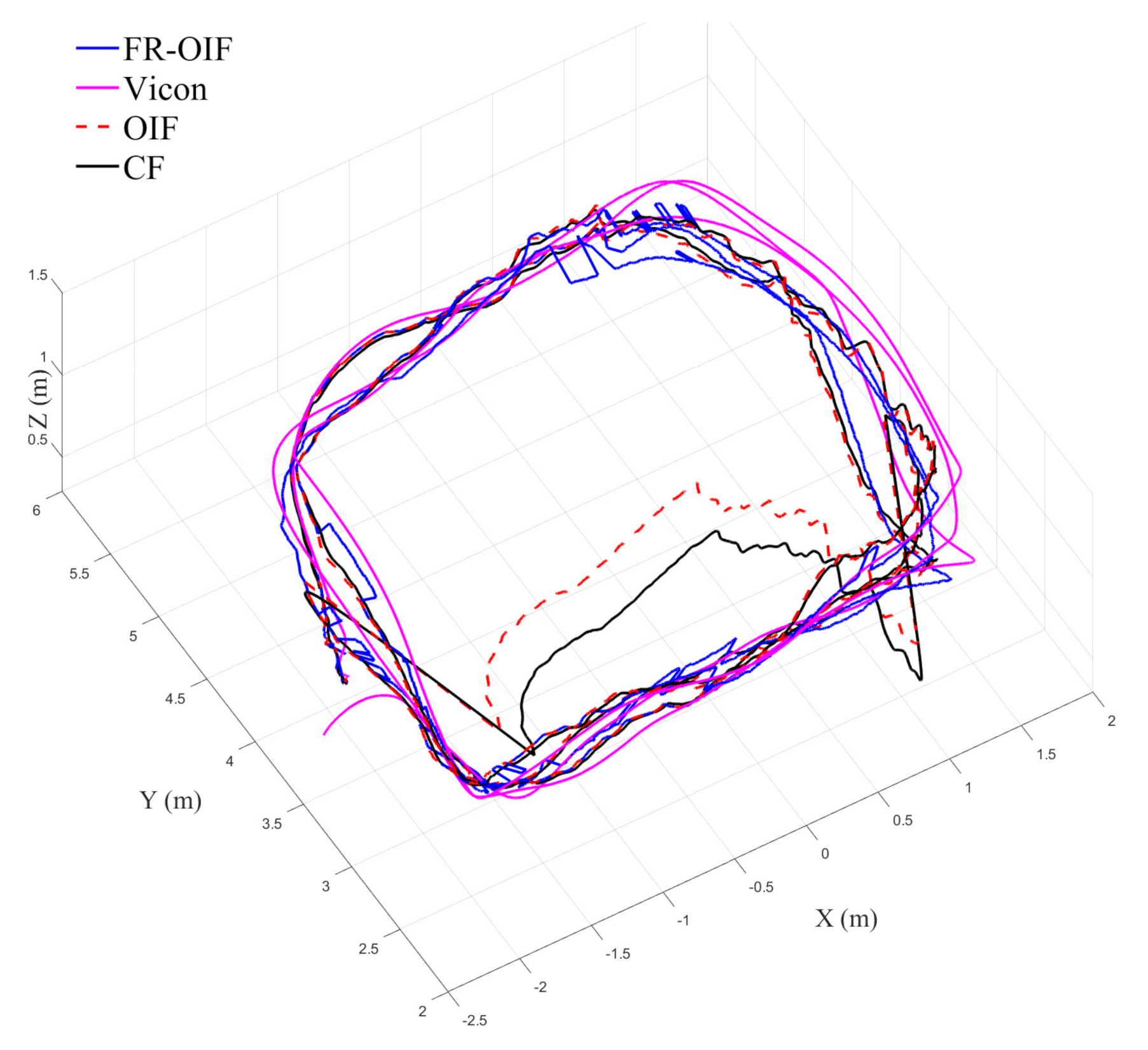
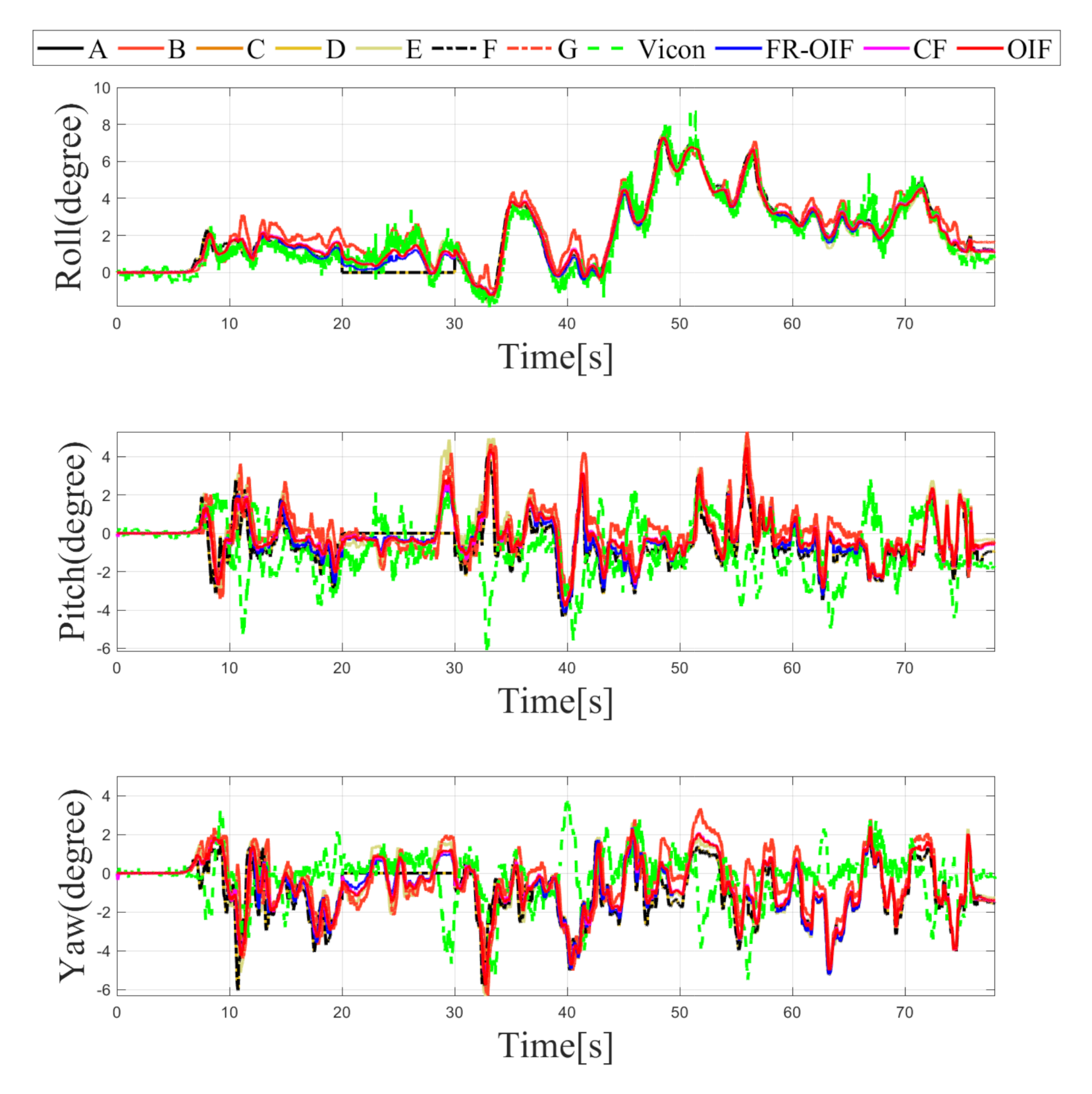
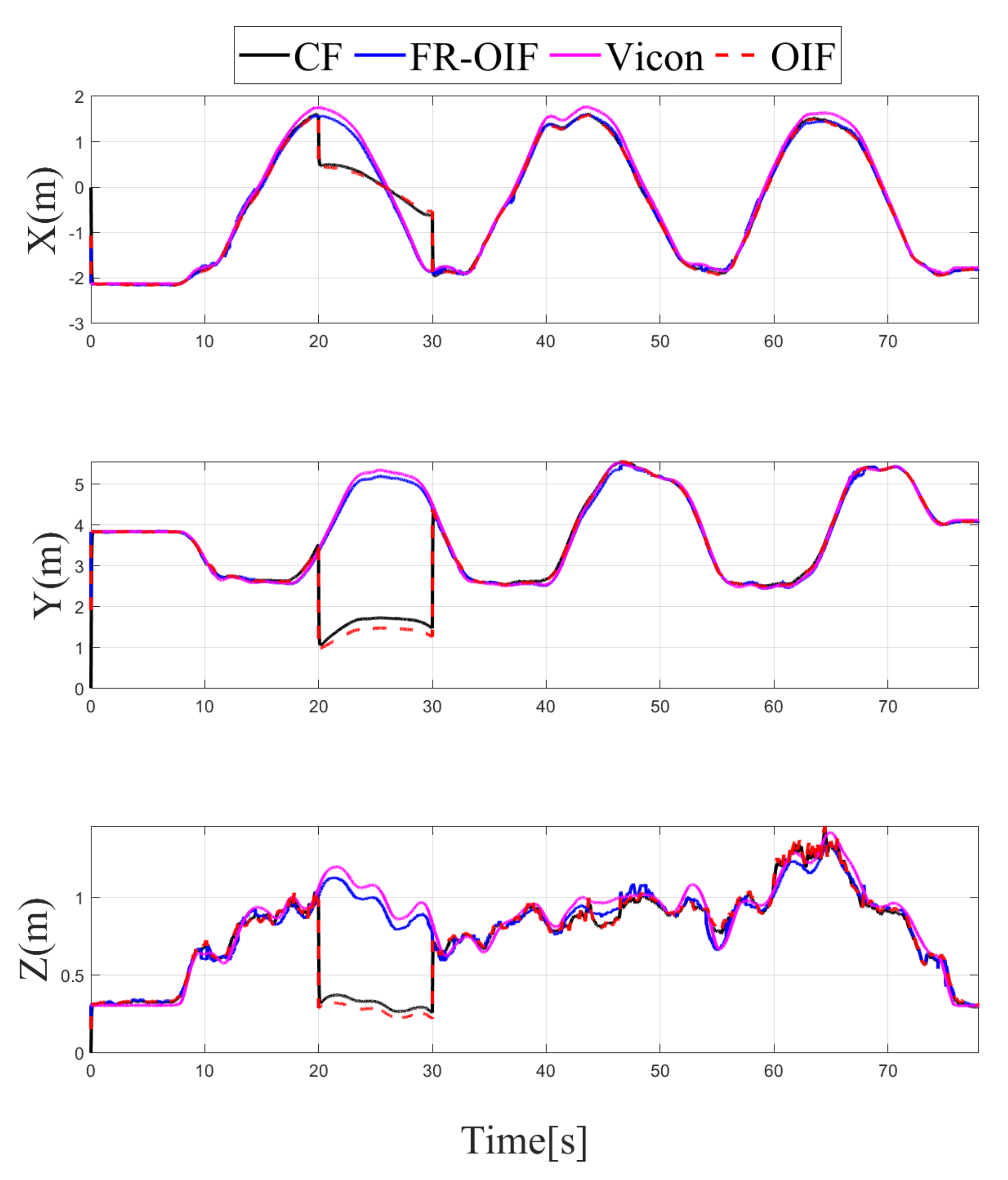
4.1. Comparison of FR-OIF with Centralized and Distributed Fusion Approaches
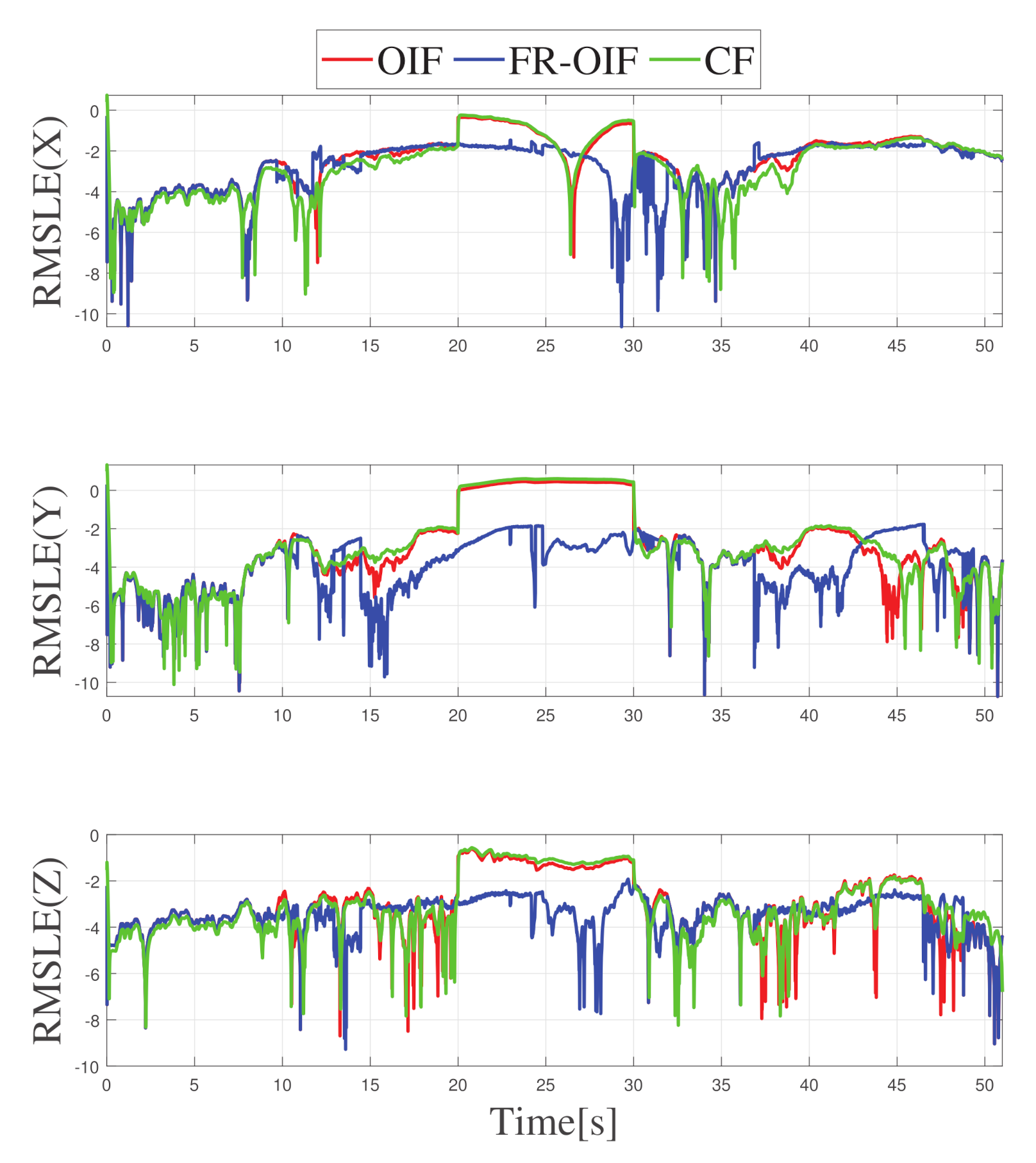
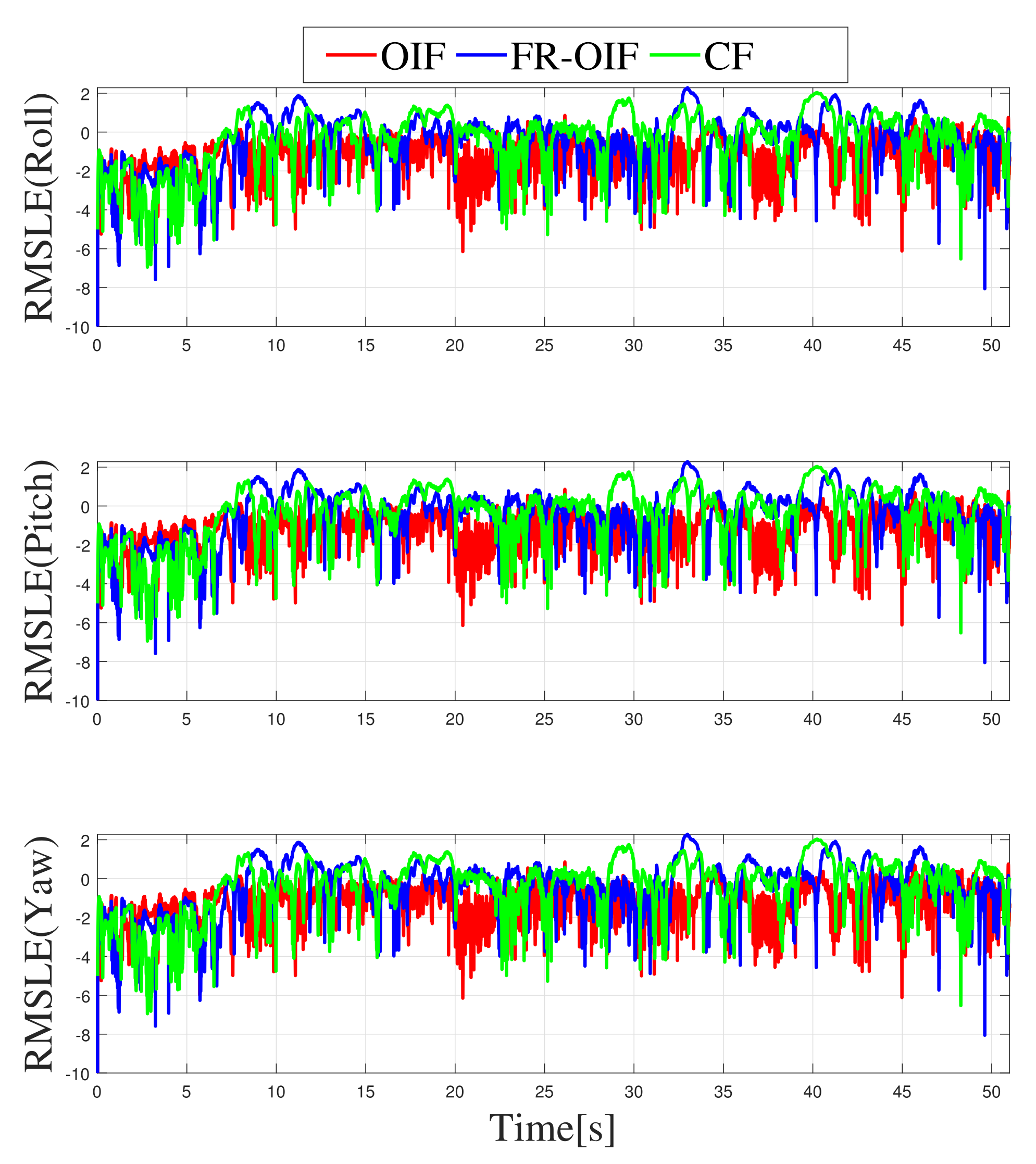
4.2. Accuracy in Terms of the Root Mean Square Error
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Wanasinghe, T.R.; Mann, G.K.; Gosine, R.G. Decentralized cooperative localization for heterogeneous multi-robot system using split covariance intersection filter. In Proceedings of the 2014 Canadian Conference on Computer and Robot Vision, Montreal, QC, Canada, 6–9 May 2014; pp. 167–174. [Google Scholar]
- Durrant-Whyte, H.F.; Rao, B.; Hu, H. Toward a fully decentralized architecture for multi-sensor data fusion. In Proceedings of the IEEE International Conference on Robotics and Automation, Cincinnati, OH, USA, 13–18 May 1990; pp. 1331–1336. [Google Scholar]
- Rigatos, G.G. Extended Kalman and particle filtering for sensor fusion in motion control of mobile robots. Math. Comput. Simul. 2010, 81, 590–607. [Google Scholar] [CrossRef]
- Yazdkhasti, S.; Sasiadek, J. Multi Sensor Fusion Based on Adaptive Kalman Filtering; Springer: Warsaw, Poland, 2017; pp. 317–333. [Google Scholar] [CrossRef]
- Brena, R.F.; Aguileta, A.A.; Trejo, L.A.; Molino-Minero-Re, E.; Mayora, O. Choosing the Best Sensor Fusion Method: A Machine-Learning Approach. Sensors 2020, 20, 2350. [Google Scholar] [CrossRef] [PubMed]
- Liggins, M., II; Hall, D.; Llinas, J. Handbook of Multisensor Data Fusion: Theory and Practice; CRC Press: Boca Raton, FL, USA, 2017. [Google Scholar]
- Hall, D.; Chong, C.Y.; Llinas, J.; Liggins, M., II. Distributed Data Fusion for Network-Centric Operations; CRC Press: Boca Raton, FL, USA, 2017. [Google Scholar]
- Hoang, T.; Duong, P.; Van, N.; Viet, D.; Vinh, T. Multi-sensor perceptual system for mobile robot and sensor fusion-based localization. In Proceedings of the 2012 International Conference on Control, Automation and Information Sciences (ICCAIS), Saigon, Vietnam, 26–29 November 2012; pp. 259–264. [Google Scholar]
- Vasquez, B.P.E.A.; Gonzalez, R.; Matia, F.; De la Puente, P. Sensor fusion for tour-guide robot localization. IEEE Access 2018, 6, 78947–78964. [Google Scholar] [CrossRef]
- Mueller, M.W.; Hamer, M.; D’Andrea, R. Fusing ultra-wideband range measurements with accelerometers and rate gyroscopes for quadrocopter state estimation. In Proceedings of the 2015 IEEE International Conference on Robotics and Automation (ICRA), Seattle, WA, USA, 26–30 May 2015; pp. 1730–1736. [Google Scholar]
- Al Khatib, E.I.; Jaradat, M.A.; Abdel-Hafez, M.; Roigari, M. Multiple sensor fusion for mobile robot localization and navigation using the Extended Kalman Filter. In Proceedings of the 2015 10th International Symposium on Mechatronics and Its Applications (ISMA), Sharjah, United Arab Emirates, 8–10 December 2015; pp. 1–5. [Google Scholar]
- Cotugno, G.; D’Alfonso, L.; Lucia, W.; Muraca, P.; Pugliese, P. Extended and Unscented Kalman Filters for mobile robot localization and environment reconstruction. In Proceedings of the 21st Mediterranean Conference on Control and Automation, Platanias, Greece, 25–28 June 2013; pp. 19–26. [Google Scholar]
- Anjum, M.L.; Park, J.; Hwang, W.; Kwon, H.i.; Kim, J.H.; Lee, C.; Kim, K.S. Sensor data fusion using unscented kalman filter for accurate localization of mobile robots. In Proceedings of the ICCAS 2010, Gyeonggi-do, Korea, 27–30 October 2010; pp. 947–952. [Google Scholar]
- Ullah, I.; Shen, Y.; Su, X.; Esposito, C.; Choi, C. A localization based on unscented Kalman filter and particle filter localization algorithms. IEEE Access 2019, 8, 2233–2246. [Google Scholar] [CrossRef]
- D’Alfonso, L.; Lucia, W.; Muraca, P.; Pugliese, P. Mobile robot localization via EKF and UKF: A comparison based on real data. Robot. Auton. Syst. 2015, 74, 122–127. [Google Scholar] [CrossRef]
- Martinelli, F. Robot localization: Comparable performance of EKF and UKF in some interesting indoor settings. In Proceedings of the 2008 16th Mediterranean Conference on Control and Automation, Ajaccio, France, 25–27 June 2008; pp. 499–504. [Google Scholar]
- Wang, S.; Chen, L.; Gu, D.; Hu, H. An optimization based moving horizon estimation with application to localization of autonomous underwater vehicles. Robot. Auton. Syst. 2014, 62, 1581–1596. [Google Scholar] [CrossRef]
- Kimura, K.; Hiromachi, Y.; Nonaka, K.; Sekiguchi, K. Vehicle localization by sensor fusion of LRS measurement and odometry information based on moving horizon estimation. In Proceedings of the 2014 IEEE Conference on Control Applications (CCA), Juan Les Antibes, France, 8–10 October 2014; pp. 1306–1311. [Google Scholar]
- Zhou, B.; Qian, K.; Fang, F.; Ma, X.; Dai, X. Multi-sensor fusion robust localization for indoor mobile robots based on a set-membership estimator. In Proceedings of the 2015 IEEE International Conference on Cyber Technology in Automation, Control and Intelligent Systems (CYBER), Shenyang, China, 8–12 June 2015; pp. 157–162. [Google Scholar]
- Fang, X.; Wang, C.; Nguyen, T.M.; Xie, L. Graph optimization approach to range-based localization. IEEE Trans. Syst. Man Cybern. Syst. 2020, 51, 6830–6841. [Google Scholar] [CrossRef] [Green Version]
- Nguyen, T.M.; Cao, M.; Yuan, S.; Lyu, Y.; Nguyen, T.H.; Xie, L. Viral-fusion: A visual-inertial-ranging-lidar sensor fusion approach. IEEE Trans. Robot. 2021, 1–20. [Google Scholar] [CrossRef]
- Nebot, E.M.; Bozorg, M.; Durrant-Whyte, H.F. Decentralized architecture for asynchronous sensors. Auton. Robot. 1999, 6, 147–164. [Google Scholar] [CrossRef]
- Alatise, M.B.; Hancke, G.P. A review on challenges of autonomous mobile robot and sensor fusion methods. IEEE Access 2020, 8, 39830–39846. [Google Scholar] [CrossRef]
- Zali, A.; Bozorg, M.; Masouleh, M.T. Localization of an indoor mobile robot using decentralized data fusion. In Proceedings of the 2019 7th International Conference on Robotics and Mechatronics (ICRoM), Tehran, Iran, 20–21 November 2019; pp. 328–333. [Google Scholar]
- Santos, M.C.; Santana, L.V.; Martins, M.M.; Brandão, A.S.; Sarcinelli-Filho, M. Estimating and controlling uav position using rgb-d/imu data fusion with decentralized information/kalman filter. In Proceedings of the 2015 IEEE International Conference on Industrial Technology (ICIT), Seville, Spain, 17–19 March 2015; pp. 232–239. [Google Scholar]
- Li, H.; Nashashibi, F. Cooperative multi-vehicle localization using split covariance intersection filter. IEEE Intell. Transp. Syst. Mag. 2013, 5, 33–44. [Google Scholar] [CrossRef]
- Sijs, J.; Lazar, M.; Bosch, P. State fusion with unknown correlation: Ellipsoidal intersection. In Proceedings of the 2010 American Control Conference, Baltimore, MD, USA, 30 June–2 July 2010; pp. 3992–3997. [Google Scholar]
- Wu, M.; Ma, H.; Zhang, X. Decentralized cooperative localization with fault detection and isolation in robot teams. Sensors 2018, 18, 3360. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Carrillo-Arce, L.C.; Nerurkar, E.D.; Gordillo, J.L.; Roumeliotis, S.I. Decentralized multi-robot cooperative localization using covariance intersection. In Proceedings of the 2013 IEEE/RSJ International Conference on Intelligent Robots and Systems, Tokyo, Japan, 3–7 November 2013; pp. 1412–1417. [Google Scholar]
- Wang, X.; Sun, S.; Li, T.; Liu, Y. Fault tolerant multi-robot cooperative localization based on covariance union. IEEE Robot. Autom. Lett. 2021, 6, 7799–7806. [Google Scholar] [CrossRef]
- Sun, S.L.; Deng, Z.L. Multi-sensor optimal information fusion Kalman filter. Automatica 2004, 40, 1017–1023. [Google Scholar] [CrossRef]
- Bakr, M.A.; Lee, S. Distributed multisensor data fusion under unknown correlation and data inconsistency. Sensors 2017, 17, 2472. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Al Hage, J.; El Najjar, M.E.; Pomorski, D. Multi-sensor fusion approach with fault detection and exclusion based on the Kullback–Leibler Divergence: Application on collaborative multi-robot system. Inf. Fusion 2017, 37, 61–76. [Google Scholar] [CrossRef]
- Li, T.; Corchado, J.M.; Sun, S. Partial consensus and conservative fusion of Gaussian mixtures for distributed PHD fusion. IEEE Trans. Aerosp. Electron. Syst. 2018, 55, 2150–2163. [Google Scholar] [CrossRef] [Green Version]
- Rekleitis, I. Cooperative Localization and Multi-Robot Exploration. Ph.D. Thesis, School of Computer Science, McGill University, Montreal, Quebec, Canada, 2003. [Google Scholar]
- Kshirsagar, J.; Shue, S.; Conrad, J.M. A survey of implementation of multi-robot simultaneous localization and mapping. In Proceedings of the SoutheastCon 2018, St. Petersburg, FL, USA, 19–22 April 2018; pp. 1–7. [Google Scholar]
- Perron, J.M.; Huang, R.; Thomas, J.; Zhang, L.; Tan, P.; Vaughan, R.T. Orbiting a moving target with multi-robot collaborative visual slam. In Proceedings of the Workshop on Multi-View Geometry in Robotics (MVIGRO), Rome, Italy, 16 July 2015; pp. 1339–1344. [Google Scholar]
- Shan, T.; Englot, B.; Meyers, D.; Wang, W.; Ratti, C.; Daniela, R. LIO-SAM: Tightly-coupled Lidar Inertial Odometry via Smoothing and Mapping. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Las Vegas, NV, USA, 24 October–24 January 2020; pp. 5135–5142. [Google Scholar]
- Corke, P.I.; Khatib, O. Robotics, Vision and Control: Fundamental Algorithms in MATLAB; Springer: Berlin/Heidelberg, Germany, 2011; Volume 73. [Google Scholar]
- Sola, J. Quaternion kinematics for the error-state Kalman filter. arXiv 2017, arXiv:1711.02508. [Google Scholar]
- Simon, D. Optimal State Estimation: Kalman, H Infinity, and Nonlinear Approaches; John Wiley & Sons: Hoboken, NJ, USA, 2006. [Google Scholar]
- Givens, M.W.; Coopmans, C. A survey of inertial sensor fusion: Applications in suas navigation and data collection. In Proceedings of the 2019 International Conference on Unmanned Aircraft Systems (ICUAS), Atlanta, GA, USA, 11–14 June 2019; pp. 1054–1060. [Google Scholar]
- Yuksel, G.; Isik, O.R. Numerical analysis of Backward–Euler discretization for simplified magnetohydrodynamic flows. Appl. Math. Model. 2015, 39, 1889–1898. [Google Scholar] [CrossRef]
- Rao, S.S. Engineering Optimization: Theory and Practice; John Wiley & Sons: Hoboken, NJ, USA, 2019. [Google Scholar]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Pose | A | B | C | D | E | F | G |
|---|---|---|---|---|---|---|---|
| Position | Real sense Camera | 3D LiDar | UWB | UWB | 3D LiDar | Real sense Camera | UWB |
| Orientation | IMU | Real sense Camera | IMU | 3D LiDar | IMU | 3D- LiDar | Real sense Camera |
| Axis | A | B | C | D | E | F | G | CF | OIF | FR-OIF |
|---|---|---|---|---|---|---|---|---|---|---|
| X | 0.1114 | 0.5740 | 0.2509 | 0.2509 | 0.5740 | 0.1114 | 0.2509 | 0.2503 | 0.2340 | 0.1394 |
| Y | 0.0806 | 2.1856 | 0.0793 | 0.0793 | 2.1856 | 0.0806 | 0.0793 | 0.7564 | 0.6452 | 0.0650 |
| Z | 0.0502 | 0.4616 | 0.1122 | 0.1122 | 0.4616 | 0.0502 | 0.1122 | 0.1751 | 0.1557 | 0.0499 |
| Angles | A | B | C | D | E | F | G | CF | OIF | FR-OIF |
|---|---|---|---|---|---|---|---|---|---|---|
| 0.4667 | 0.7522 | 0.4667 | 0.7473 | 0.4667 | 0.7473 | 0.0168 | 0.5343 | 0.5154 | 0.5340 | |
| 2.0663 | 2.1664 | 2.0663 | 1.9324 | 2.0663 | 1.9324 | 0.0188 | 1.9618 | 1.9618 | 1.9505 | |
| 1.9387 | 1.9246 | 1.9387 | 1.9357 | 1.9387 | 1.9357 | 0.0066 | 1.8365 | 1.8456 | 1.8341 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Mukherjee, M.; Banerjee, A.; Papadimitriou, A.; Mansouri, S.S.; Nikolakopoulos, G. A Decentralized Sensor Fusion Scheme for Multi Sensorial Fault Resilient Pose Estimation. Sensors 2021, 21, 8259. https://doi.org/10.3390/s21248259
Mukherjee M, Banerjee A, Papadimitriou A, Mansouri SS, Nikolakopoulos G. A Decentralized Sensor Fusion Scheme for Multi Sensorial Fault Resilient Pose Estimation. Sensors. 2021; 21(24):8259. https://doi.org/10.3390/s21248259
Chicago/Turabian StyleMukherjee, Moumita, Avijit Banerjee, Andreas Papadimitriou, Sina Sharif Mansouri, and George Nikolakopoulos. 2021. "A Decentralized Sensor Fusion Scheme for Multi Sensorial Fault Resilient Pose Estimation" Sensors 21, no. 24: 8259. https://doi.org/10.3390/s21248259
APA StyleMukherjee, M., Banerjee, A., Papadimitriou, A., Mansouri, S. S., & Nikolakopoulos, G. (2021). A Decentralized Sensor Fusion Scheme for Multi Sensorial Fault Resilient Pose Estimation. Sensors, 21(24), 8259. https://doi.org/10.3390/s21248259