
A Human-Following Motion Planning and Control Scheme for Collaborative Robots Based on Human Motion Prediction



Abstract
:1. Introduction
- 1
- The proposed human-following motion planning and control scheme enables the worker to pick up the necessary parts and tools when needed.
- 2
- The proposed scheme achieves the human-following motion with a sufficiently small tracking error without adversely affecting the safety and comfort of the worker.
- 3
- Experiments conducted in an environment similar to a real automobile assembly process illustrate the effectiveness of the proposed scheme.
2. Related Works
2.1. Human–Robot Handover
2.2. Human-Following Robots
2.3. Motion/Task Planning Based on Human Motion Prediction
3. Proposed Motion Planning and Control Scheme
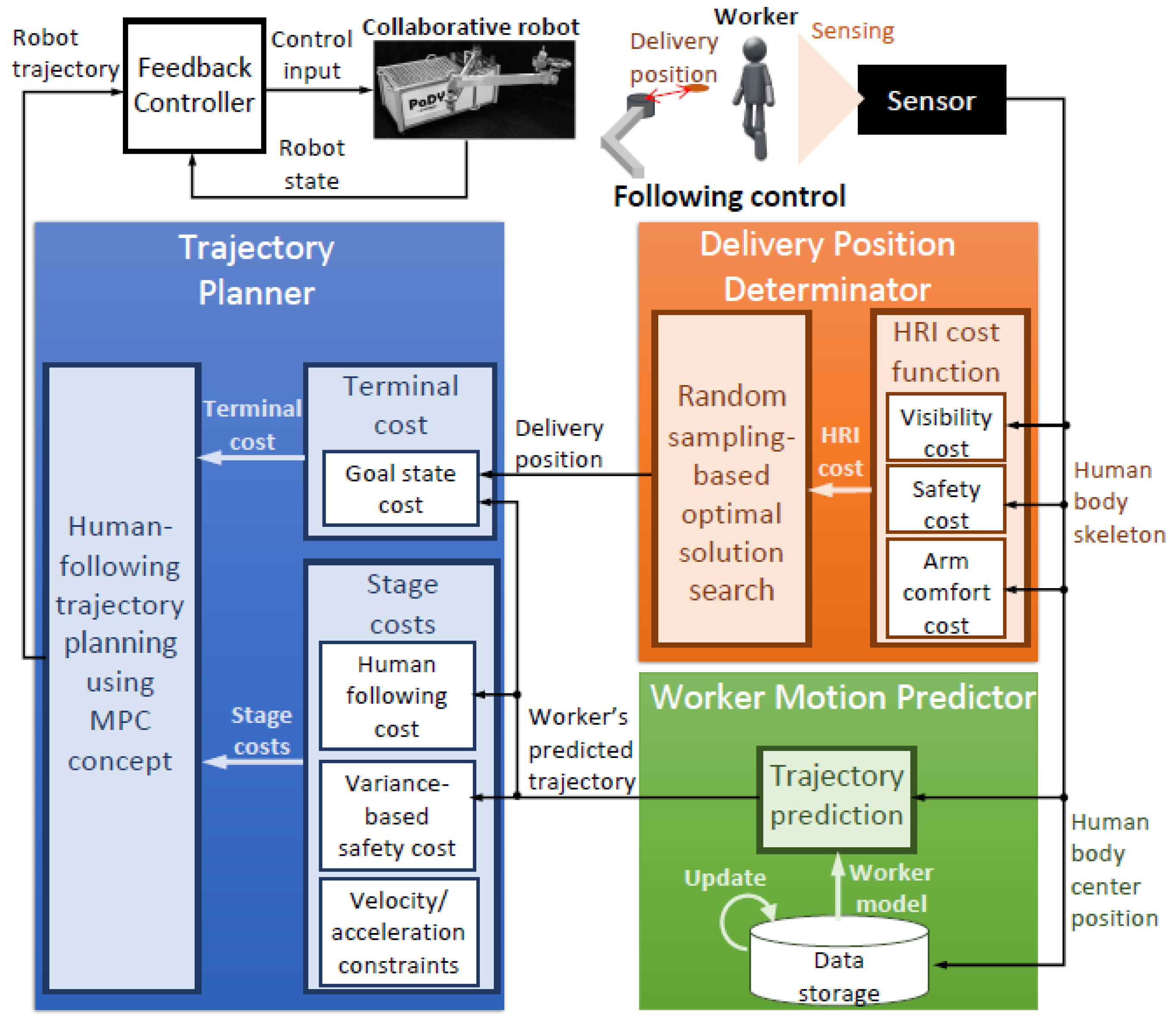
3.1. System Architecture
- 1
- Delivery position determination;
- 2
- Worker’s motion prediction;
- 3
- Trajectory planning and control.
3.2. Delivery Position Determination
| Algorithm 1: Determination of Optimal Delivery Position using T-RRT |
| Input: Worker’s position , |
| Current sample of the worker’s skeleton , |
| Sampling range , |
| HRI cost function |
| Output: Optimal delivery position |
| 1: Set the sampling area using and |
| 2: |
| 3: |
| 4: |
| 5: whiledo |
| 6: |
| 7: |
| 8: |
| 9: if then |
| 10: |
| 11: |
| 12: |
| 13: else |
| 14: |
| 15: end if |
| 16: end while |
| 17: |
| 18: return |
3.3. Worker’s Motion Prediction
| Algorithm 2: Worker’s motion prediction using GMR |
| Input: Current time , |
| Current position , |
| Position history , |
| Max prediction length |
| Output: Predicted trajectory |
| 1: whiledo |
| 2: |
| 3: |
| 4: |
| 5: |
| 6: end while |
3.4. Trajectory Planning and Control
| Algorithm 3: Robot Trajectory Generator |
| Input: Target delivery position , |
| Predicted worker’s trajectory , |
| Current state of the robot , |
| Max length of the robot trajectory |
| Output: Optimal trajectory is |
| 1: Initialize the set of input vectors |
| 2: |
| 3: whiledo |
| 4: while do |
| 5: |
| 6: end while |
| 7: while do |
| 8: |
| 9: end while |
| 10: while do |
| 11: |
| 12: end while |
| 13: |
| 14: end while |
| 15: whiledo |
| 16: |
| 17: end while |
4. Experiment
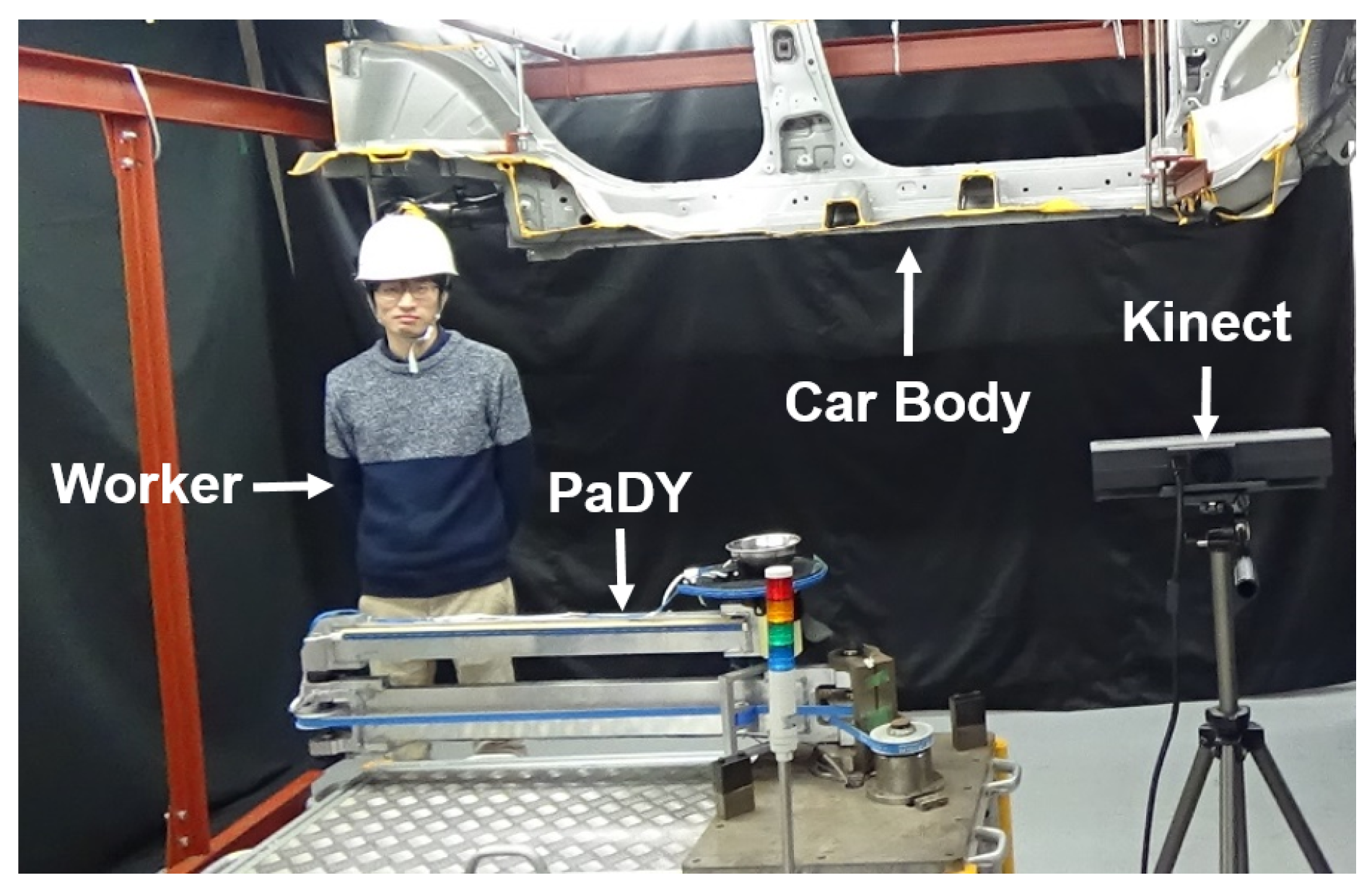
4.1. Experimental Setup
- 1
- Tightening a bolt (Task 1);
- 2
- Attaching three grommets (Task 2);
- 3
- Attaching one grommet (Task 3, Task 4, Task 5, Task 6).
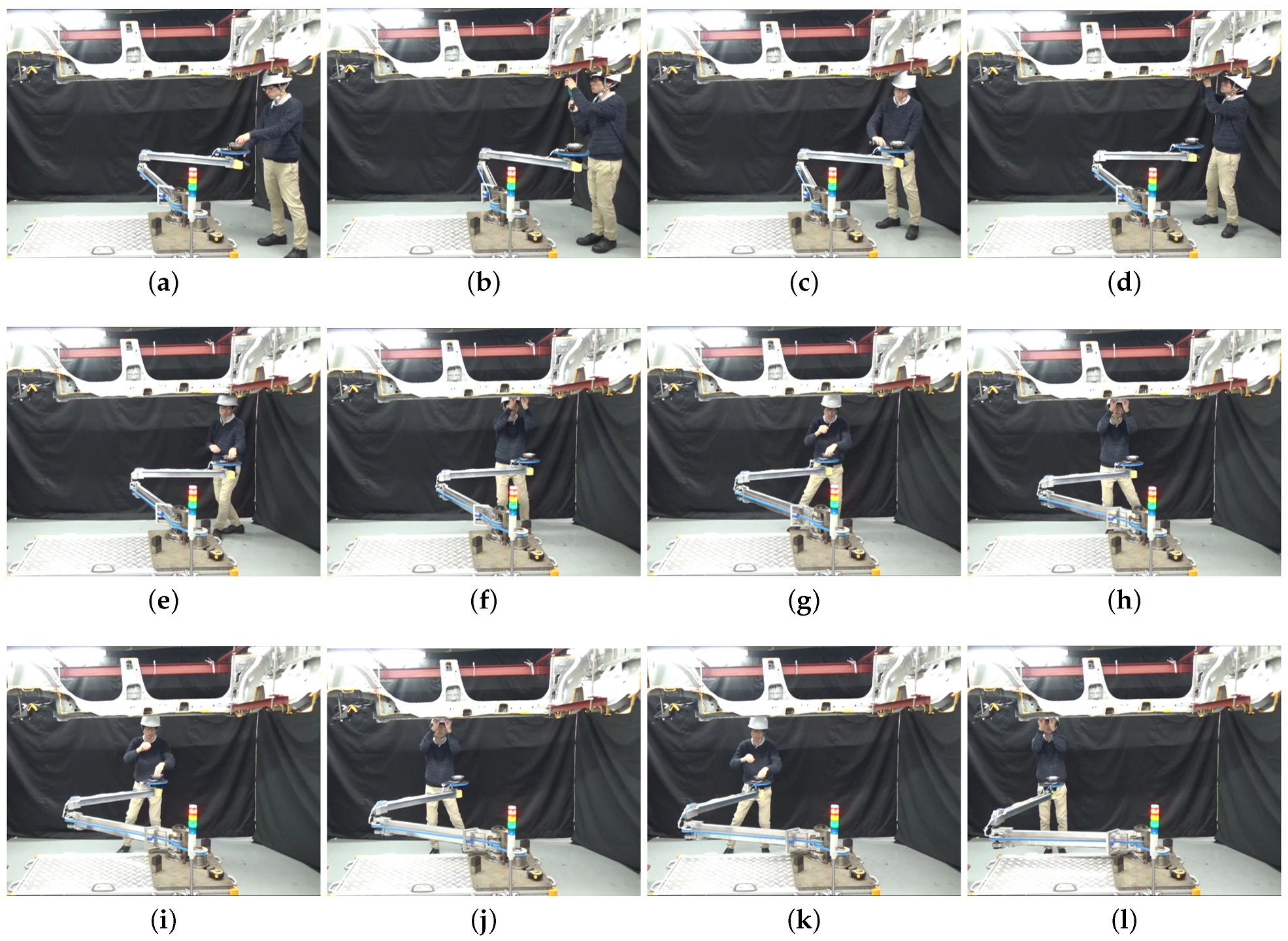
- 1
- The experiment begins when the robot starts to approach the worker standing at the working position for Task 1. The worker takes a bolt and the bolt tightening tool from the robot (Figure 6a).
- 2
- The worker performs Task 1 (Figure 6b).
- 3
- The worker moves to the working position for Task 2 and the robot follows him. The worker returns the bolt tightening tool to the tool holder (Figure 6c) and picks up three grommets from the parts tray.
- 4
- The worker performs Task 2 (Figure 6d).
- 5
- The worker moves to the working position for Task 3 and picks up a grommet from the tray (Figure 6e).
- 6
- The worker performs Task 3 (Figure 6f).
- 7
- The worker moves to the working position for Task 4 and picks up a grommet from the tray (Figure 6g).
- 8
- The worker performs Task 4 (Figure 6h).
- 9
- The worker moves to the working position for Task 5 and picks up another grommet from the parts tray (Figure 6i).
- 10
- The worker performs Task 5 (Figure 6j).
- 11
- The worker moves to the working position Task 6 and picks up the last grommet from the parts tray (Figure 6k).
- 12
- The worker performs Task 6 (Figure 6l) and this concludes the experiment.
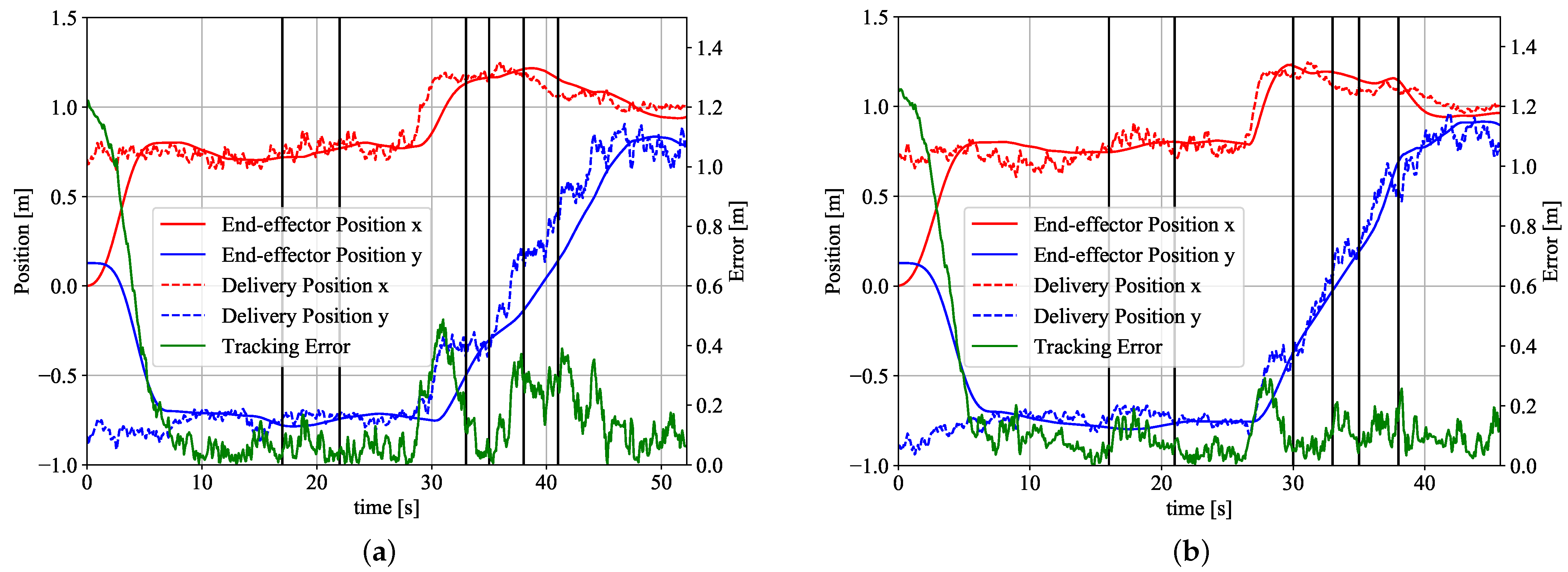
4.2. Tracking Performance
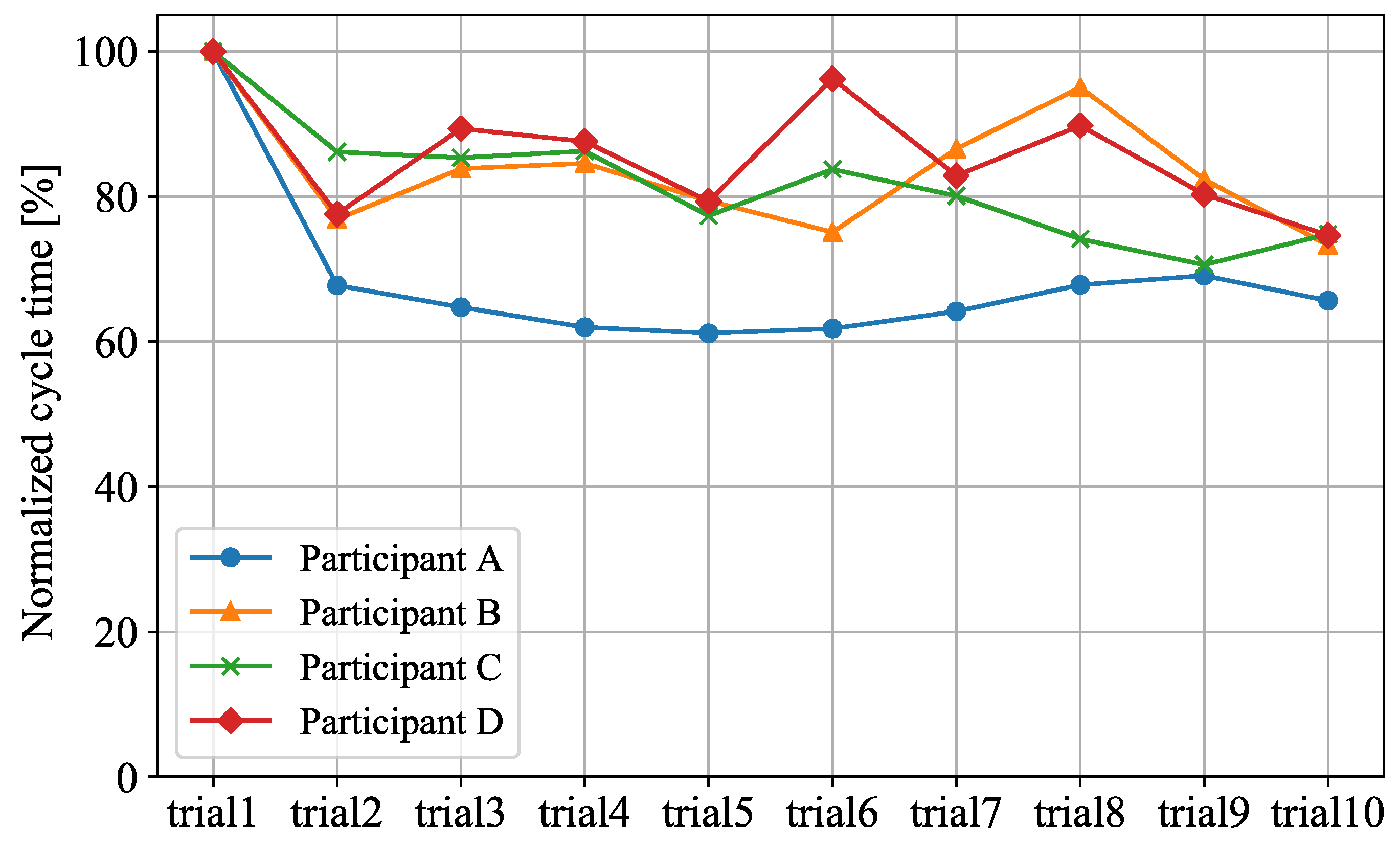
4.3. Cycle Time
4.4. HRI-Based Cost
5. Conclusions
Supplementary Materials
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| HRI | Human–Robot Interaction |
| MPC | Model Predictive Control |
| ISO | International Organization of Standardization |
| DOF | Degrees Of Freedom |
| PaDY | In-time Parts and tools Delivery to You robot |
| T-RRT | Transition-based Rapidly exploring Random Trees |
| GMR | Gaussian Mixture Regression |
| RMSE | Root Mean Square Error |
Appendix A. Detail Calculation of Gaussian Mixture Regression
References
- Troccaz, J.; Lavallee, S.; Hellion, E. A passive arm with dynamic constraints: A solution to safety problems in medical robotics. In Proceedings of the IEEE Systems Man and Cybernetics Conference—SMC, Le Touquet, France, 17–20 October 1993; Volume 3, pp. 166–171. [Google Scholar] [CrossRef]
- Colgate, J.; Wannasuphoprasit, W.; Peshkin, M. Cobots: Robots for collaboration with human operators. In Proceedings of the 1996 ASME International Mechanical Engineering Congress and Exposition, Atlanta, Georgia, 17–22 November 1996; pp. 433–439. [Google Scholar]
- Yamada, Y.; Konosu, H.; Morizono, T.; Umetani, Y. Proposal of Skill-Assist: A system of assisting human workers by reflecting their skills in positioning tasks. In Proceedings of the IEEE SMC’99 Conference Proceedings 1999 IEEE International Conference on Systems, Man, and Cybernetics (Cat. No.99CH37028), Tokyo, Japan, 12–15 October 1999; Volume 4, pp. 11–16. [Google Scholar] [CrossRef]
- ISO. ISO 10218-1:2011—Robots and Robotic Devices—Safety Requirements for Industrial Robots—Part 1: Robots; ISO: Geneva, Switzerland, 2011. [Google Scholar]
- ISO. ISO 10218-2:2011—Robots and Robotic Devices—Safety Requirements for Industrial Robots—Part 2: Robot Systems and Integration; ISO: Geneva, Switzerland, 2011. [Google Scholar]
- Perakovic, D.; Periša, M.; Cvitić, I.; Zorić, P. Information and communication technologies for the society 5.0 environment. In Proceedings of the XXXVIII Simpozijum o Novim Tehnologijama u Poštanskom i Telekomunikacionom Saobraćaju—PosTel 2020, Belgrade, Serbia, 1–2 December 2020. [Google Scholar] [CrossRef]
- Kinugawa, J.; Kawaai, Y.; Sugahara, Y.; Kosuge, K. PaDY: Human-friendly/cooperative working support robot for production site. In Proceedings of the 2010 IEEE/RSJ International Conference on Intelligent Robots and Systems, Taipei, Taiwan, 18–22 October 2010; pp. 5472–5479. [Google Scholar] [CrossRef]
- Hawkins, K.P.; Vo, N.; Bansal, S.; Bobick, A.F. Probabilistic human action prediction and wait-sensitive planning for responsive human-robot collaboration. In Proceedings of the 2013 13th IEEE-RAS International Conference on Humanoid Robots (Humanoids), Atlanta, GA, USA, 15–17 October 2013; pp. 499–506. [Google Scholar] [CrossRef]
- Pérez-D’Arpino, C.; Shah, J.A. Fast target prediction of human reaching motion for cooperative human-robot manipulation tasks using time series classification. In Proceedings of the 2015 IEEE International Conference on Robotics and Automation (ICRA), Seattle, WA, USA, 26–30 May 2015; pp. 6175–6182. [Google Scholar] [CrossRef]
- Unhelkar, V.V.; Lasota, P.A.; Tyroller, Q.; Buhai, R.D.; Marceau, L.; Deml, B.; Shah, J.A. Human-Aware Robotic Assistant for Collaborative Assembly: Integrating Human Motion Prediction With Planning in Time. IEEE Robot. Autom. Lett. 2018, 3, 2394–2401. [Google Scholar] [CrossRef] [Green Version]
- Bonci, A.; Cen Cheng, P.D.; Indri, M.; Nabissi, G.; Sibona, F. Human-Robot Perception in Industrial Environments: A Survey. Sensors 2021, 21, 1571. [Google Scholar] [CrossRef] [PubMed]
- Tanaka, Y.; Kinugawa, J.; Sugahara, Y.; Kosuge, K. Motion planning with worker’s trajectory prediction for assembly task partner robot. In Proceedings of the 2012 IEEE/RSJ International Conference on Intelligent Robots and Systems, Vilamoura, Algarve, Portugal, 7–12 October 2012; pp. 1525–1532. [Google Scholar] [CrossRef]
- Kanazawa, A.; Kinugawa, J.; Kosuge, K. Adaptive Motion Planning for a Collaborative Robot Based on Prediction Uncertainty to Enhance Human Safety and Work Efficiency. IEEE Trans. Robot. 2019, 35, 817–832. [Google Scholar] [CrossRef]
- Baraglia, J.; Cakmak, M.; Nagai, Y.; Rao, R.; Asada, M. Initiative in robot assistance during collaborative task execution. In Proceedings of the 2016 11th ACM/IEEE International Conference on Human-Robot Interaction (HRI), Christchurch, New Zealand, 7–10 March 2016; pp. 67–74. [Google Scholar] [CrossRef]
- Cakmak, M.; Srinivasa, S.S.; Lee, M.K.; Forlizzi, J.; Kiesler, S. Human preferences for robot-human hand-over configurations. In Proceedings of the 2011 IEEE/RSJ International Conference on Intelligent Robots and Systems, San Francisco, CA, USA, 25–30 September 2011; pp. 1986–1993. [Google Scholar] [CrossRef] [Green Version]
- Cakmak, M.; Srinivasa, S.S.; Lee, M.K.; Kiesler, S.; Forlizzi, J. Using spatial and temporal contrast for fluent robot-human hand-overs. In Proceedings of the 2011 6th ACM/IEEE International Conference on Human-Robot Interaction (HRI), Lausanne, Switzerland, 6–9 March 2011; pp. 489–496. [Google Scholar] [CrossRef]
- Mainprice, J.; Akin Sisbot, E.; Jaillet, L.; Cortés, J.; Alami, R.; Siméon, T. Planning human-aware motions using a sampling-based costmap planner. In Proceedings of the 2011 IEEE International Conference on Robotics and Automation, Shanghai, China, 9–13 May 2011; pp. 5012–5017. [Google Scholar] [CrossRef] [Green Version]
- Aleotti, J.; Micelli, V.; Caselli, S. An Affordance Sensitive System for Robot to Human Object Handover. Int. J. Soc. Robot. 2014, 6, 653–666. [Google Scholar] [CrossRef]
- Sisbot, E.A.; Alami, R. A Human-Aware Manipulation Planner. IEEE Trans. Robot. 2012, 28, 1045–1057. [Google Scholar] [CrossRef]
- Nagumo, Y.; Ohya, A. Human following behavior of an autonomous mobile robot using light-emitting device. In Proceedings of the 10th IEEE International Workshop on Robot and Human Interactive Communication, ROMAN 2001 (Cat. No.01TH8591), Paris, France, 18–21 September 2001; pp. 225–230. [Google Scholar] [CrossRef]
- Hirai, N.; Mizoguchi, H. Visual tracking of human back and shoulder for person following robot. In Proceedings of the 2003 IEEE/ASME International Conference on Advanced Intelligent Mechatronics (AIM 2003), Kobe, Japan, 20–24 July 2003; Volume 1, pp. 527–532. [Google Scholar] [CrossRef]
- Yoshimi, T.; Nishiyama, M.; Sonoura, T.; Nakamoto, H.; Tokura, S.; Sato, H.; Ozaki, F.; Matsuhira, N.; Mizoguchi, H. Development of a Person Following Robot with Vision Based Target Detection. In Proceedings of the 2006 IEEE/RSJ International Conference on Intelligent Robots and Systems, Beijing, China, 9–13 October 2006; pp. 5286–5291. [Google Scholar] [CrossRef]
- Morioka, K.; Oinaga, Y.; Nakamura, Y. Control of human-following robot based on cooperative positioning with an intelligent space. Electron. Commun. Jpn. 2012, 95, 20–30. [Google Scholar] [CrossRef]
- Suda, R.; Kosuge, K. Handling of object by mobile robot helper in cooperation with a human using visual information and force information. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems, Lausanne, Switzerland, 30 September–4 October 2002; Volume 2, pp. 1102–1107. [Google Scholar] [CrossRef]
- Mainprice, J.; Berenson, D. Human-robot collaborative manipulation planning using early prediction of human motion. In Proceedings of the 2013 IEEE/RSJ International Conference on Intelligent Robots and Systems, Tokyo, Japan, 3–7 November 2013; pp. 299–306. [Google Scholar] [CrossRef]
- Fridovich-Keil, D.; Bajcsy, A.; Fisac, J.F.; Herbert, S.L.; Wang, S.; Dragan, A.D.; Tomlin, C.J. Confidence-aware motion prediction for real-time collision avoidance. Int. J. Robot. Res. 2020, 39, 250–265. [Google Scholar] [CrossRef]
- Park, J.S.; Park, C.; Manocha, D. I-Planner: Intention-aware motion planning using learning-based human motion prediction. Int. J. Robot. Res. 2019, 38, 23–39. [Google Scholar] [CrossRef] [Green Version]
- Maeda, G.; Ewerton, M.; Neumann, G.; Lioutikov, R.; Peters, J. Phase estimation for fast action recognition and trajectory generation in human-robot collaboration. Int. J. Robot. Res. 2017, 36, 1579–1594. [Google Scholar] [CrossRef]
- Liu, H.; Wang, L. Human motion prediction for human-robot collaboration. J. Manuf. Syst. 2017, 44, 287–294. [Google Scholar] [CrossRef]
- Cheng, Y.; Sun, L.; Liu, C.; Tomizuka, M. Towards Efficient Human-Robot Collaboration With Robust Plan Recognition and Trajectory Prediction. IEEE Robot. Autom. Lett. 2020, 5, 2602–2609. [Google Scholar] [CrossRef]
- Sisbot, E.A.; Marin-Urias, L.F.; Alami, R.; Simeon, T. A Human Aware Mobile Robot Motion Planner. IEEE Trans. Robot. 2007, 23, 874–883. [Google Scholar] [CrossRef] [Green Version]
- Iqbal, K.F.; Kanazawa, A.; Ottaviani, S.R.; Kinugawa, J.; Kosuge, K. A real-time motion planning scheme for collaborative robots using HRI-based cost function. Int. J. Mechatr. Autom. 2021, 8, 42–52. [Google Scholar] [CrossRef]
- Jaillet, L.; Cortes, J.; Simeon, T. Transition-based RRT for path planning in continuous cost spaces. In Proceedings of the 2008 IEEE/RSJ International Conference on Intelligent Robots and Systems, Nice, France, 22–26 September 2008; pp. 2145–2150. [Google Scholar] [CrossRef] [Green Version]
- Kinugawa, J.; Kanazawa, A.; Arai, S.; Kosuge, K. Adaptive Task Scheduling for an Assembly Task Coworker Robot Based on Incremental Learning of Human’s Motion Patterns. IEEE Robot. Autom. Lett. 2017, 2, 856–863. [Google Scholar] [CrossRef]
- Calinon, S.; Bruno, D.; Caldwell, D.G. A task-parameterized probabilistic model with minimal intervention control. In Proceedings of the 2014 IEEE International Conference on Robotics and Automation (ICRA), Hong Kong, China, 31 May–7 June 2014; pp. 3339–3344. [Google Scholar] [CrossRef] [Green Version]
- Du Toit, N.E.; Burdick, J.W. Robot Motion Planning in Dynamic, Uncertain Environments. IEEE Trans. Robot. 2012, 28, 101–115. [Google Scholar] [CrossRef]
- Sung, H.G. Gaussian Mixture Regression and Classification. Ph.D. Thesis, Rice University, Houstion, TX, USA, 2004. [Google Scholar]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Worker | Average Cost (without Prediction) | Average Cost (with Prediction) | Max Cost (without Prediction) | Max Cost (with Prediction) |
|---|---|---|---|---|
| Worker A | 8.99 | 11.79 | 36.34 | 35.82 |
| Worker B | 12.73 | 9.90 | 38.17 | 34.44 |
| Worker C | 18.35 | 13.56 | 39.65 | 31.33 |
| Worker D | 16.30 | 17.50 | 31.47 | 31.26 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Khawaja, F.I.; Kanazawa, A.; Kinugawa, J.; Kosuge, K. A Human-Following Motion Planning and Control Scheme for Collaborative Robots Based on Human Motion Prediction. Sensors 2021, 21, 8229. https://doi.org/10.3390/s21248229
Khawaja FI, Kanazawa A, Kinugawa J, Kosuge K. A Human-Following Motion Planning and Control Scheme for Collaborative Robots Based on Human Motion Prediction. Sensors. 2021; 21(24):8229. https://doi.org/10.3390/s21248229
Chicago/Turabian StyleKhawaja, Fahad Iqbal, Akira Kanazawa, Jun Kinugawa, and Kazuhiro Kosuge. 2021. "A Human-Following Motion Planning and Control Scheme for Collaborative Robots Based on Human Motion Prediction" Sensors 21, no. 24: 8229. https://doi.org/10.3390/s21248229
APA StyleKhawaja, F. I., Kanazawa, A., Kinugawa, J., & Kosuge, K. (2021). A Human-Following Motion Planning and Control Scheme for Collaborative Robots Based on Human Motion Prediction. Sensors, 21(24), 8229. https://doi.org/10.3390/s21248229