
Ultrasound Defect Localization in Shell Structures with Lamb Waves Using Spare Sensor Array and Orthogonal Matching Pursuit Decomposition


Abstract
:1. Introduction
2. Methodology
2.1. Introduction of OMP
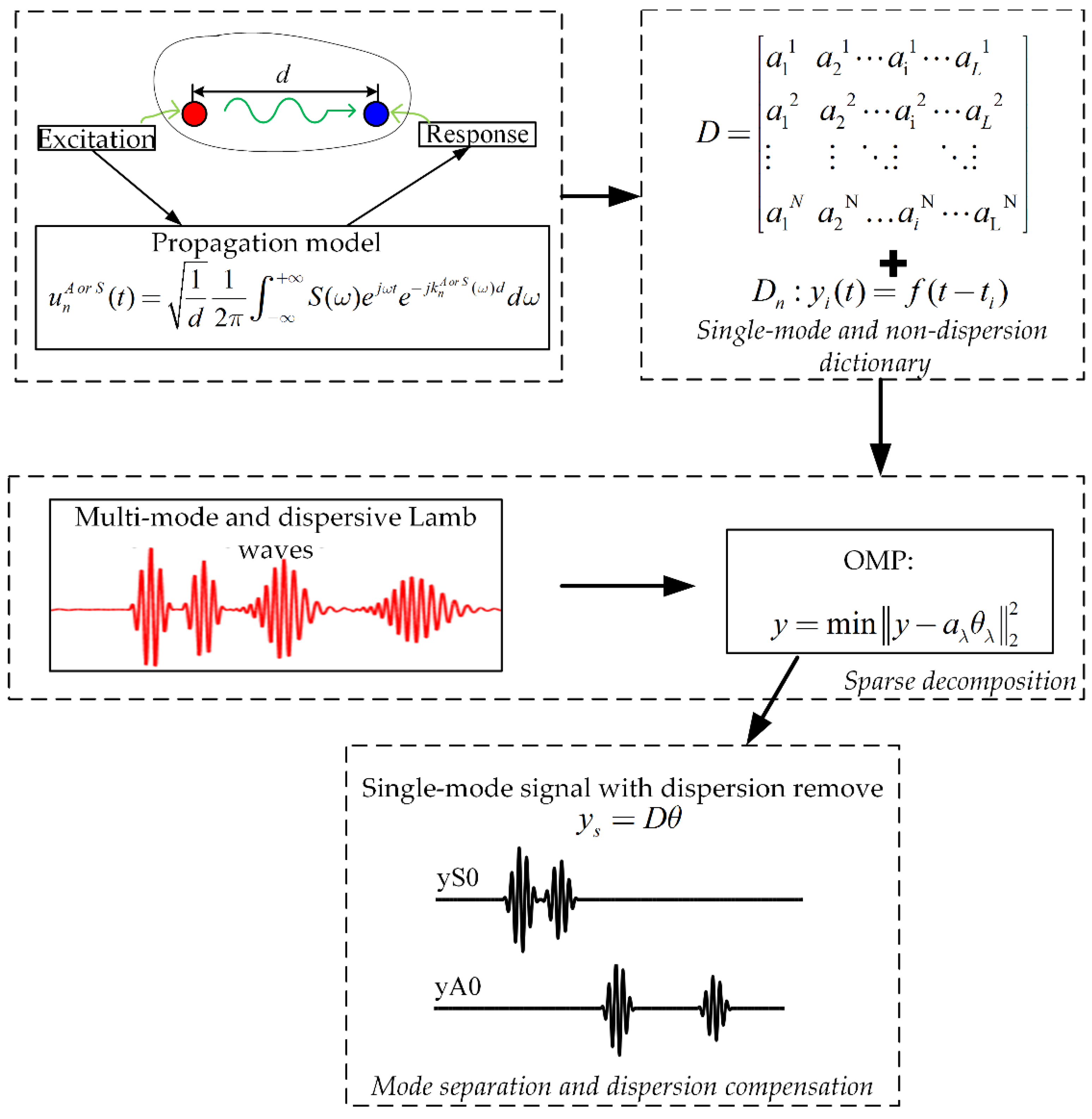
2.2. Overcomplete Dictionary Construction
2.3. Nondispersive Dictionary
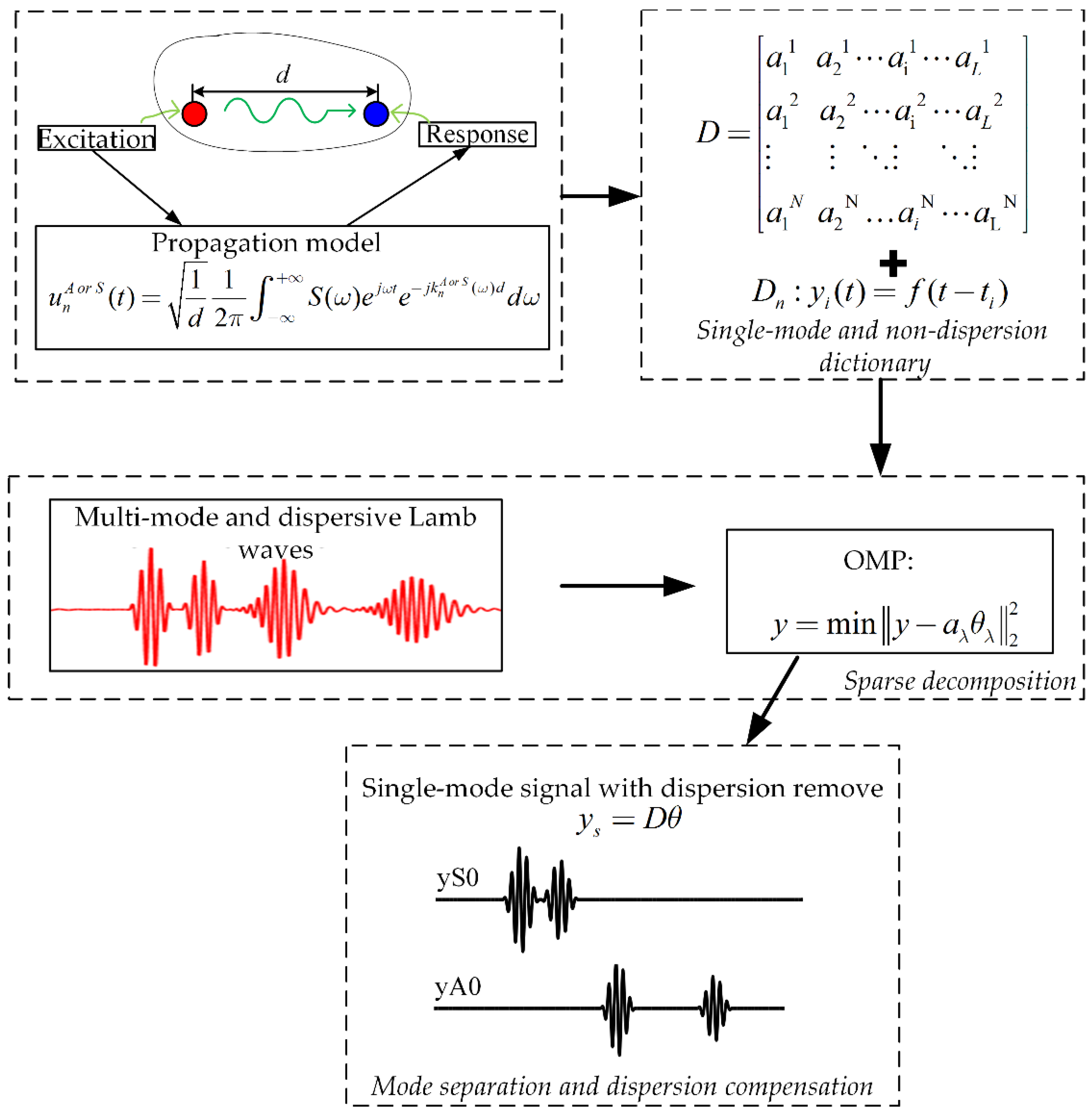
2.4. OMP-Based Decomposition and Dispersion Removal Algorithm
- (1)
- Initialization process. Determine sparsity degree K which means the number of potential wave packets. Build an overcomplete dictionary D as:
- (2)
- Orthogonal matching. Find the column aλ in the dictionary according to the product value θλ of acquisition signal y and aλ. Then, record the product value θλ, known as matching coefficients. , λ indicates that the atom is the λ-th column in the dictionary, and .
- (3)
- Update and iteration. Update the solution set , and update the residual signal by subtracting the selected atoms from the signal of last iteration.
- (4)
- Termination judgment. Determine whether the number of iterations is greater than K. If it is not satisfied, execute the matching and update procedures again.
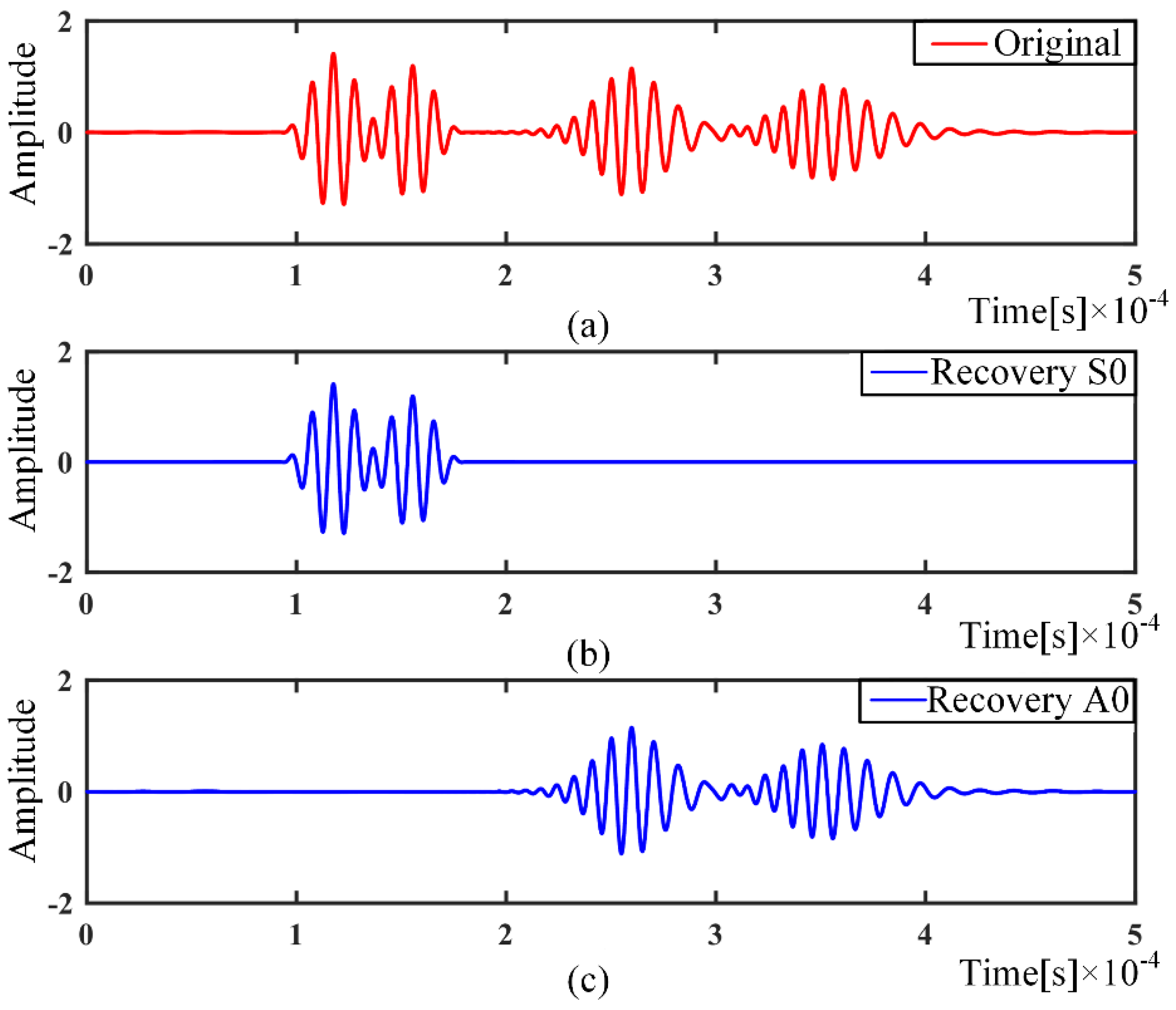
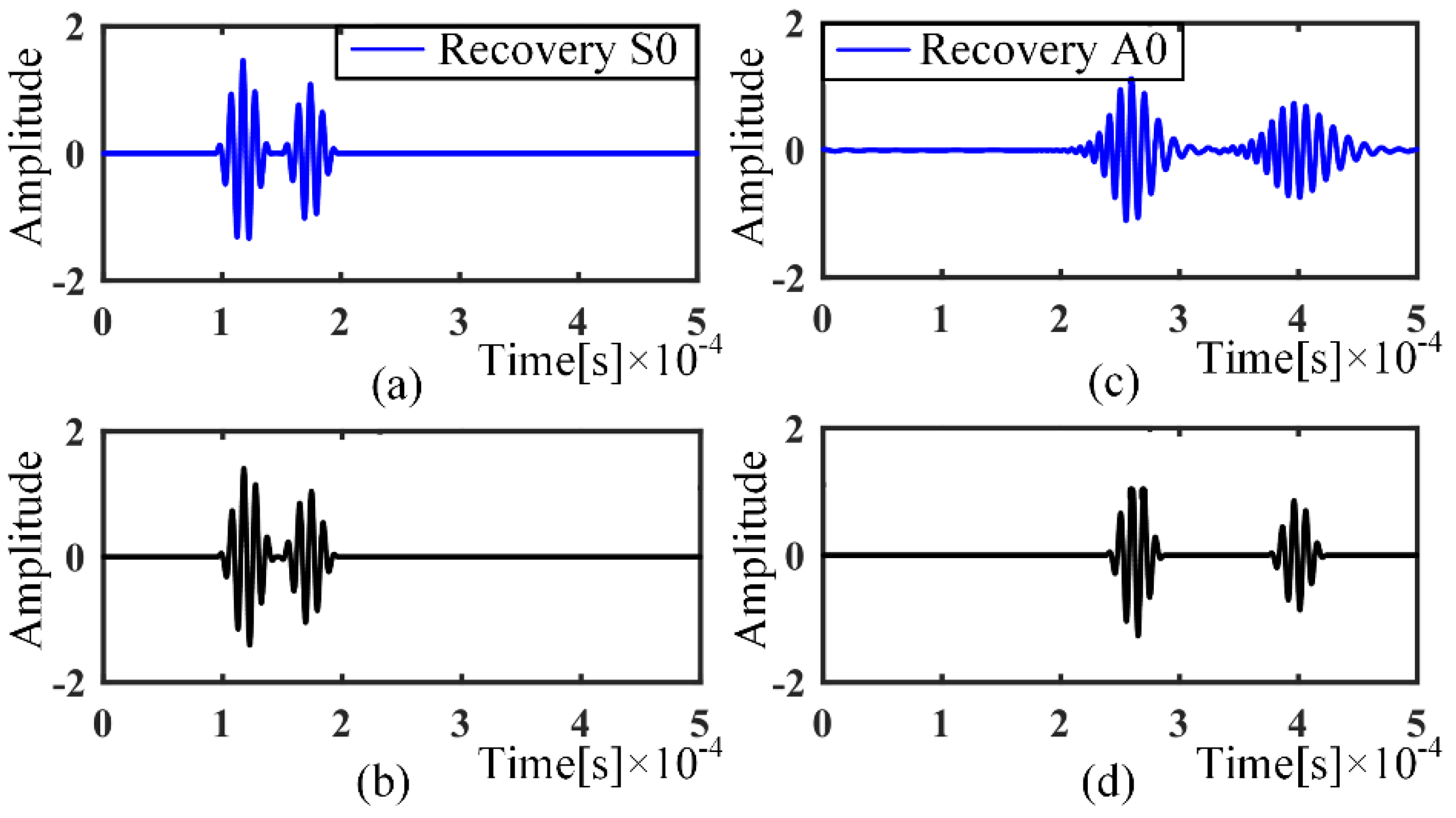
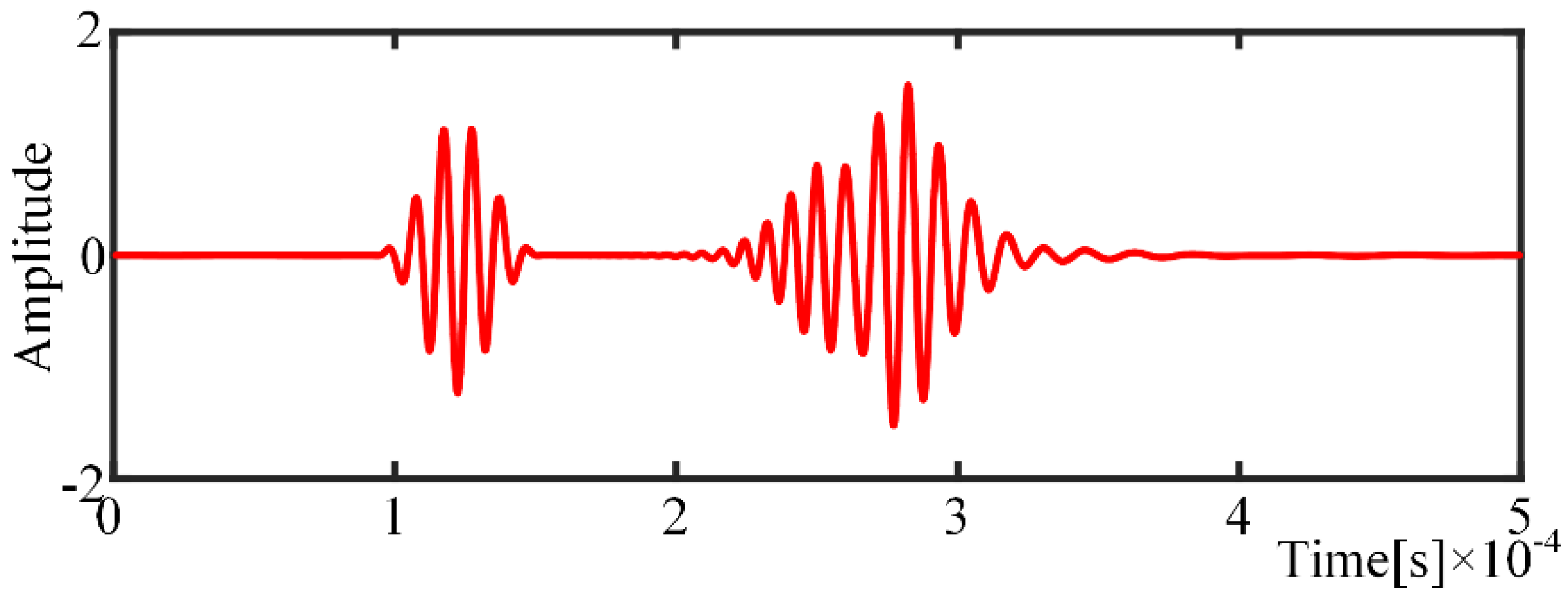
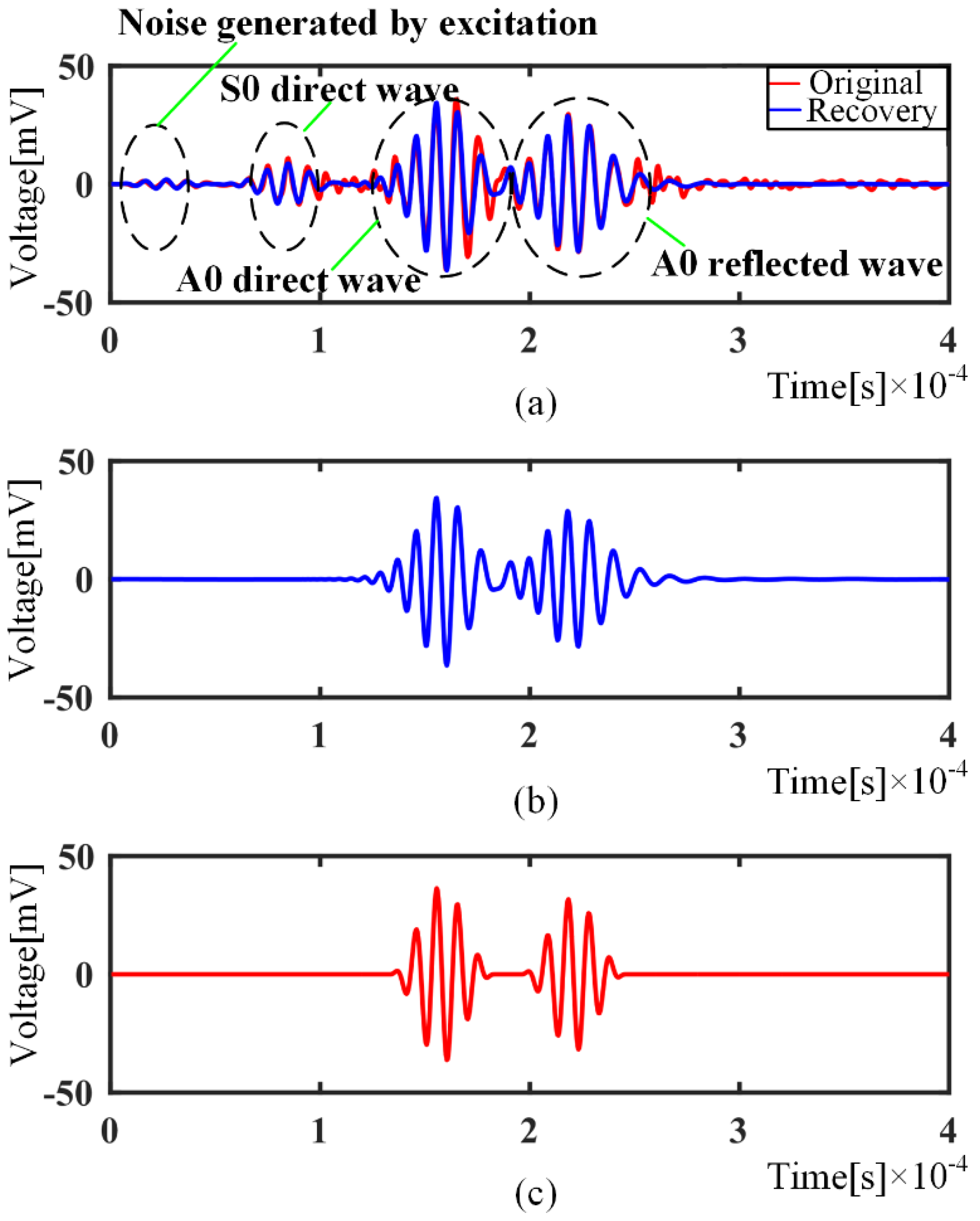
3. Methodology Verification
Numerical Simulation
4. Experimental Verification
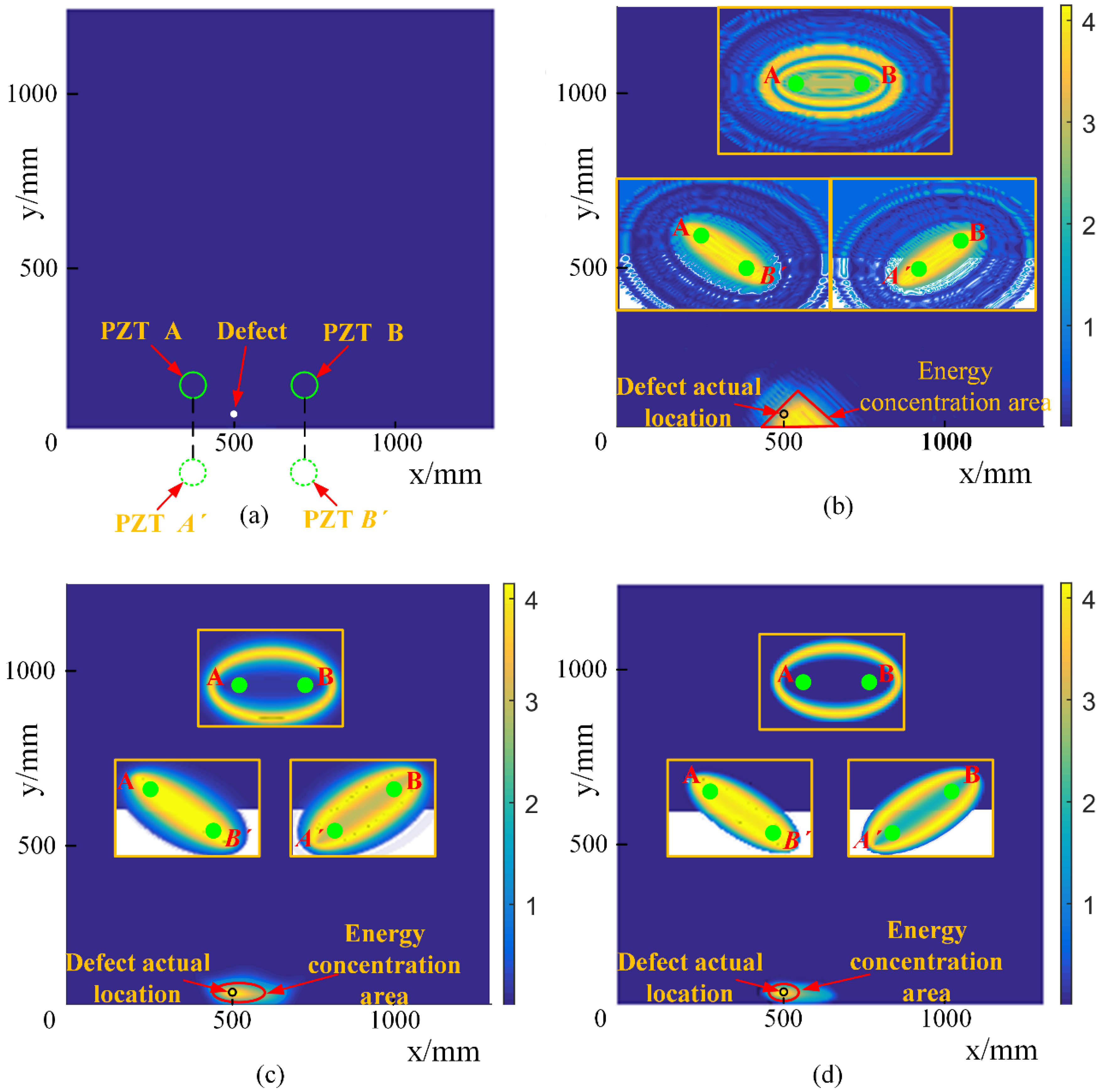
4.1. Sparse Sensor Array-Based Localization Method
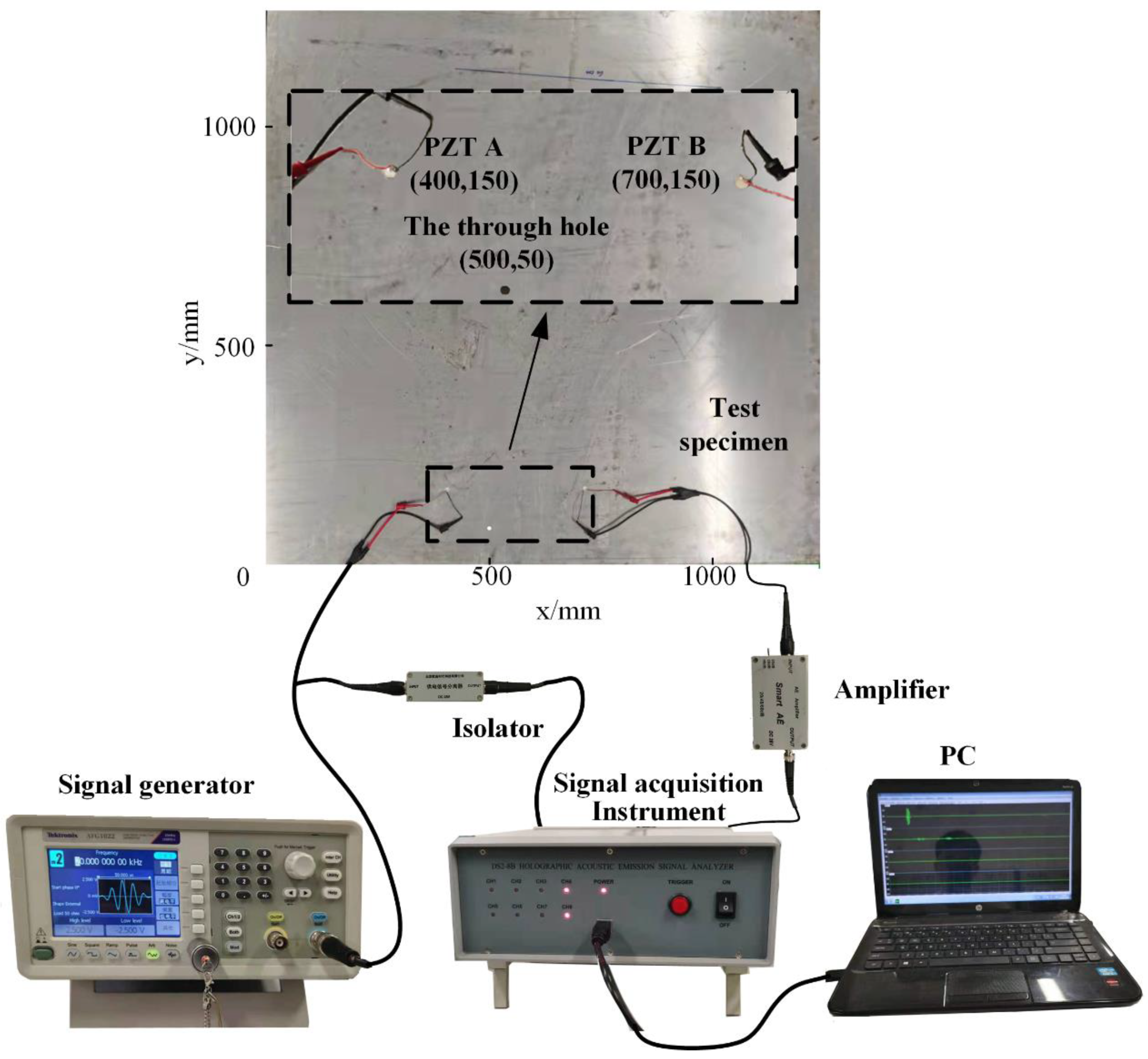
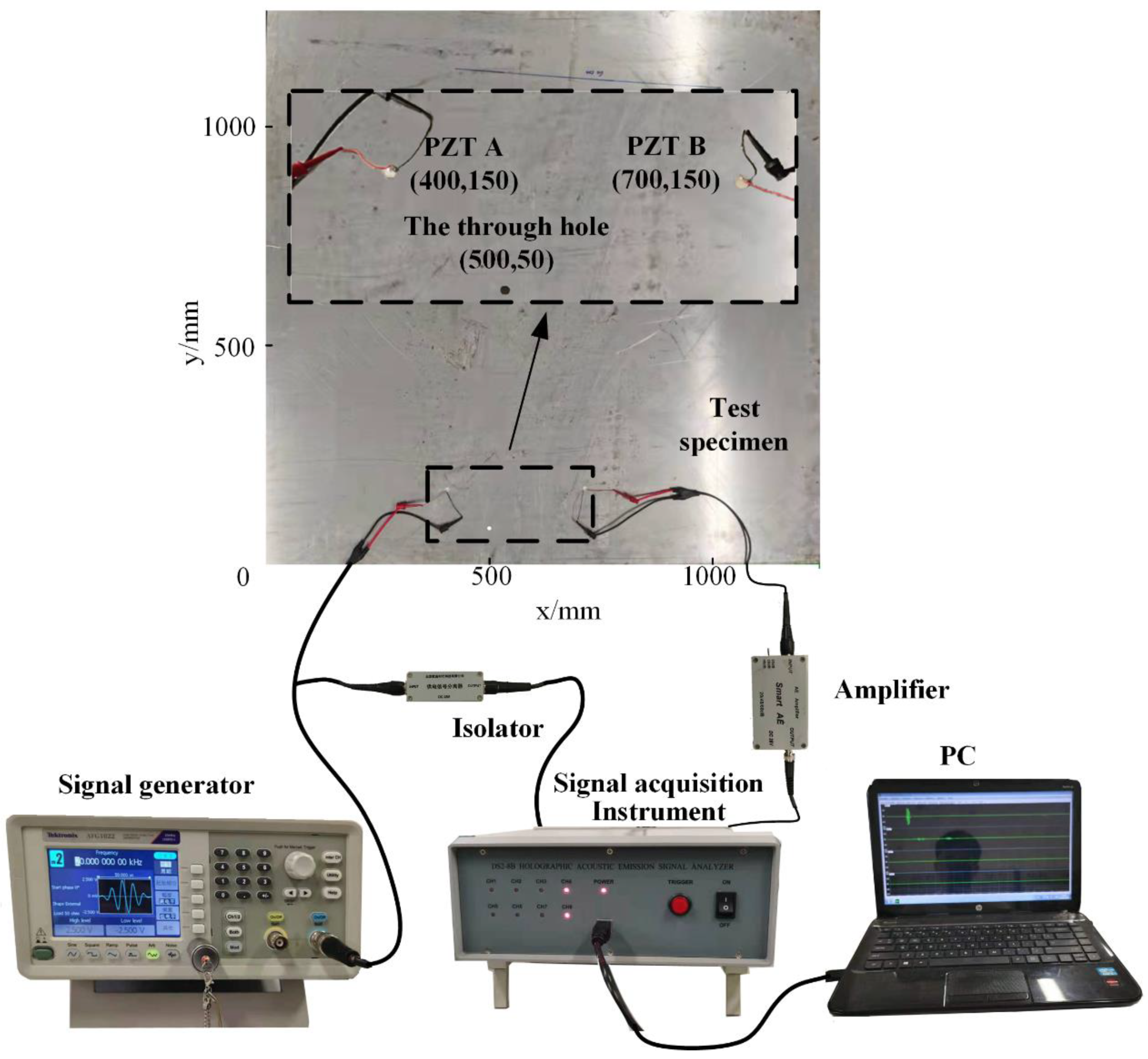
4.2. Experimental Setup
- (1)
- under the intact condition, excite a five-peak sinusoidal wave modulated by Hanning window with a center frequency of 100 kHz from PZT A, collect the signals from PZT B. Then, excite modulated wave from PZT B, and collect the signals from PZT B. These signals are considered to be the reference signals.
- (2)
- in the practical monitoring, repeat the acquisition step above.
- (3)
- subtract the intact signal from the acquisition signal with defects, known as the state-relative signals.
- (4)
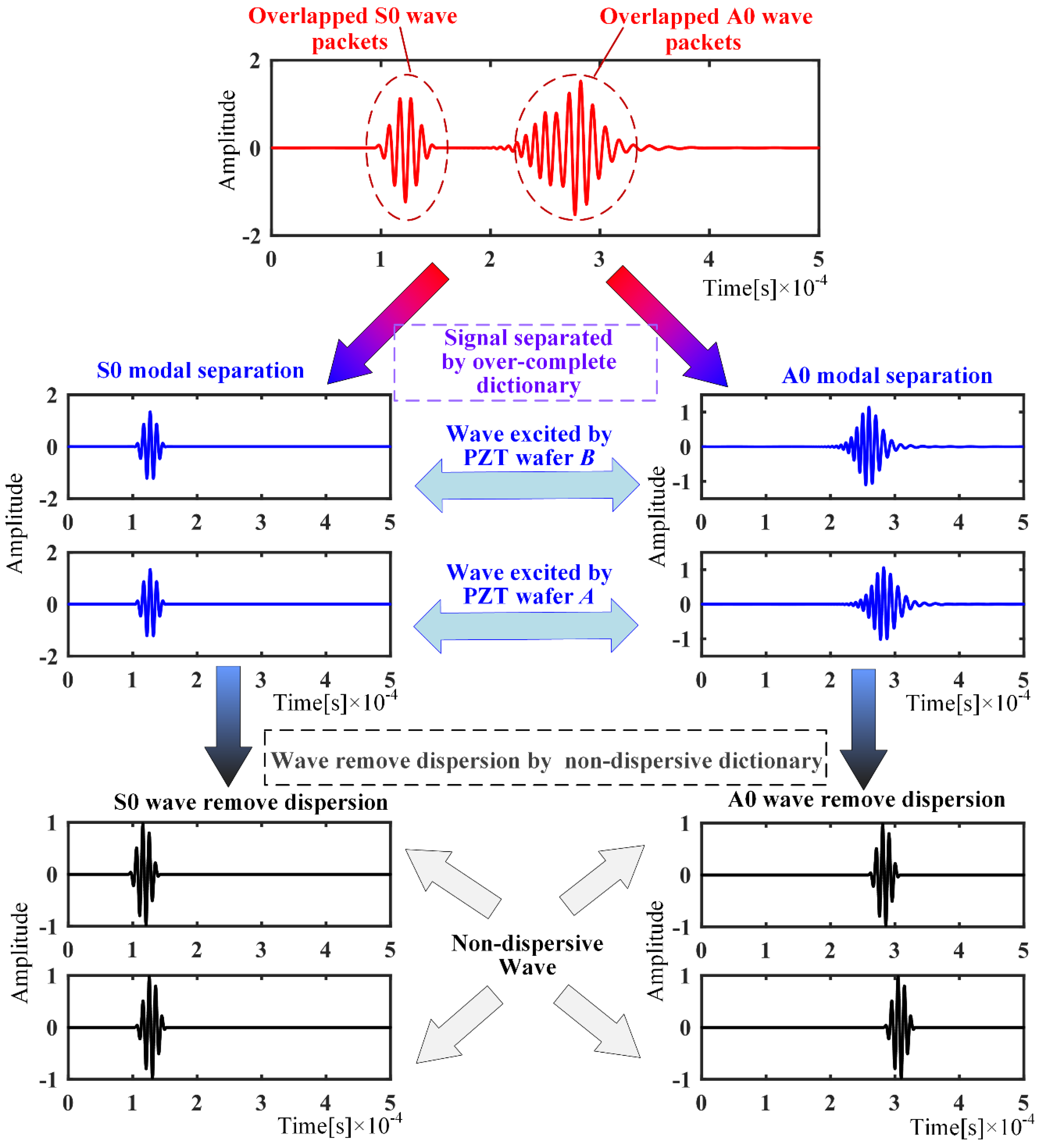
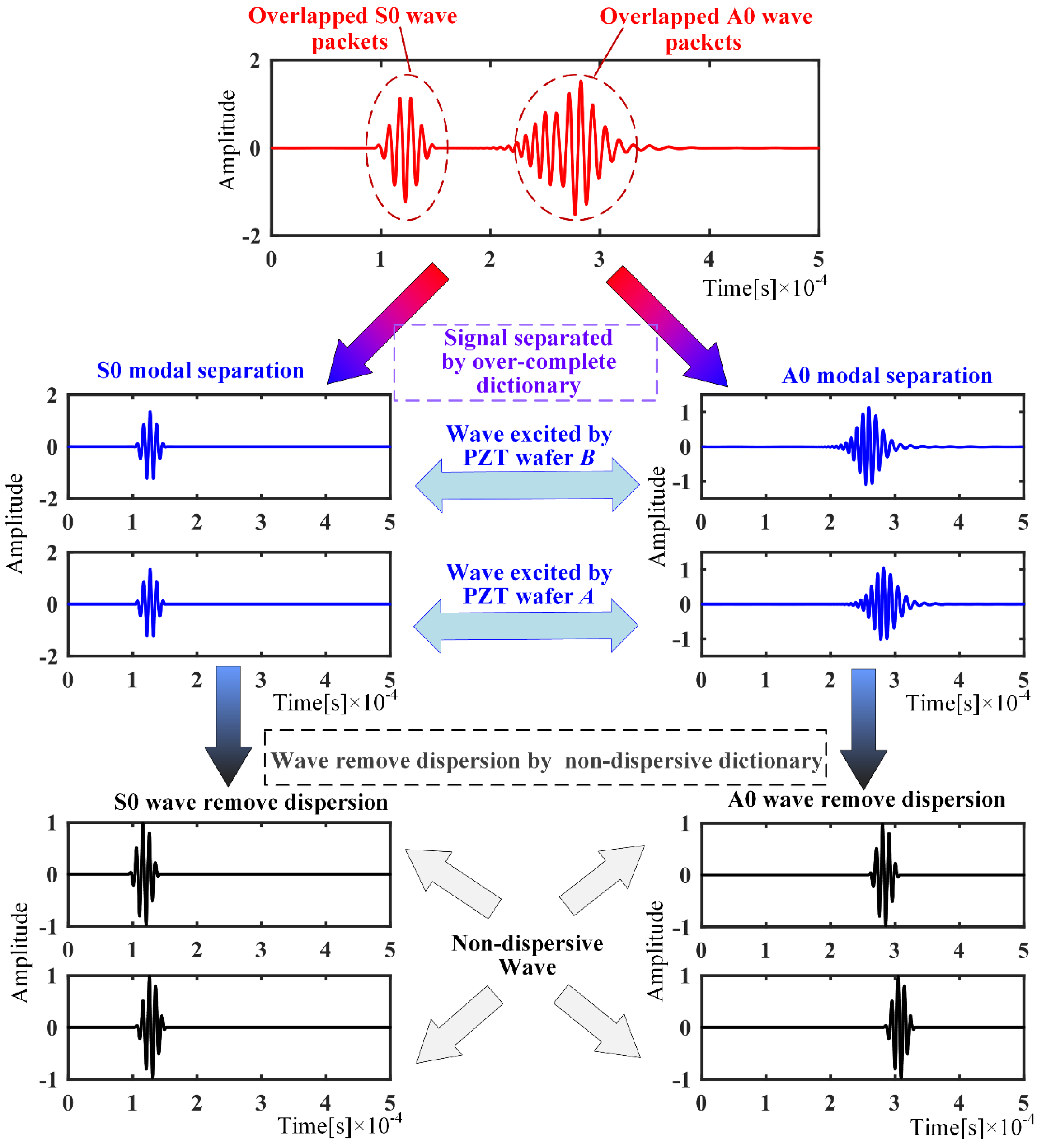
- decompose the state-relative signals into wave packets of a single mode by the OMP-based decomposition and dispersion compensation method.
- (5)
- localize the defect by sparse sensor array-based localization method.
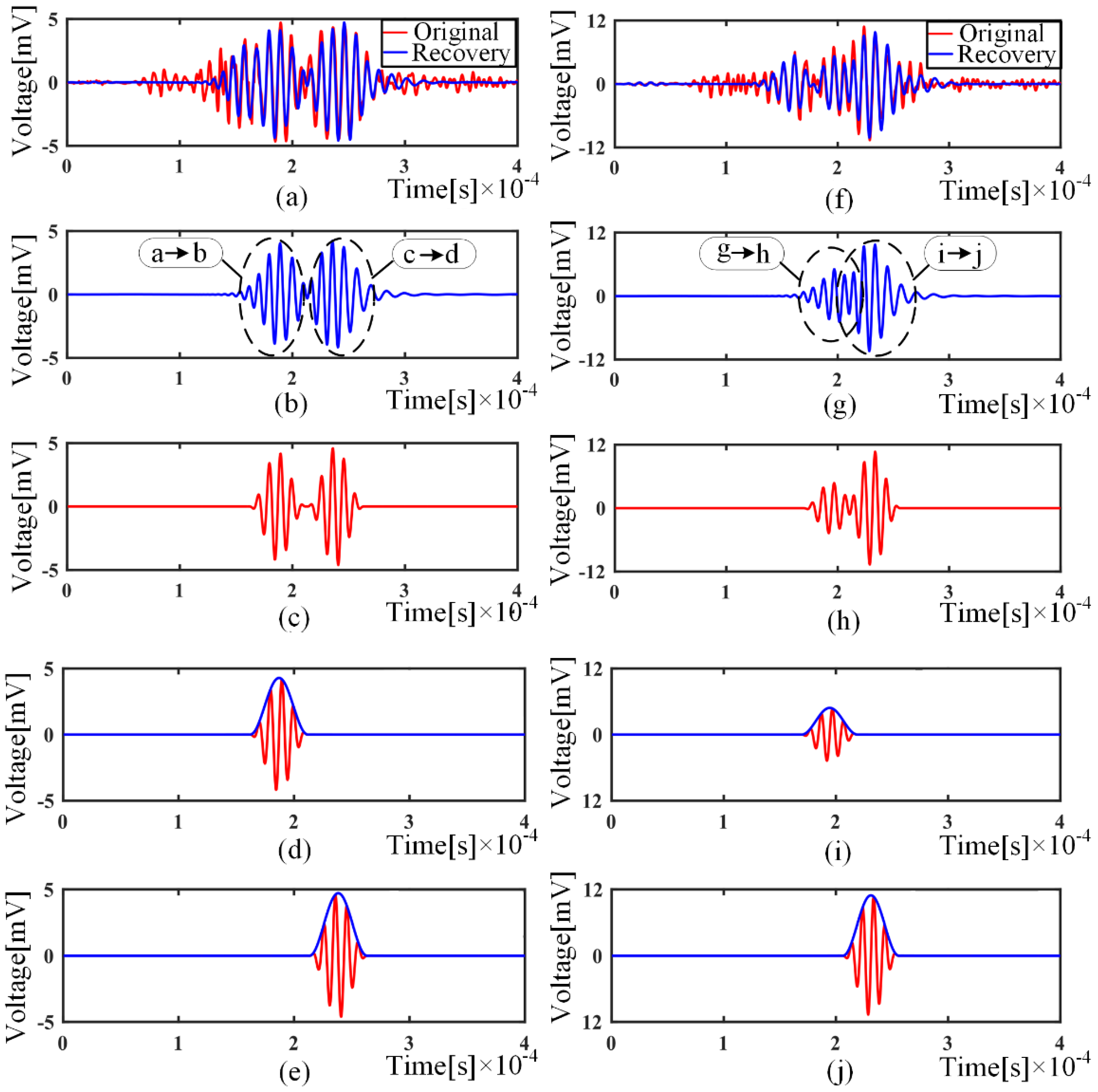
4.3. Experimental Results
5. Conclusions
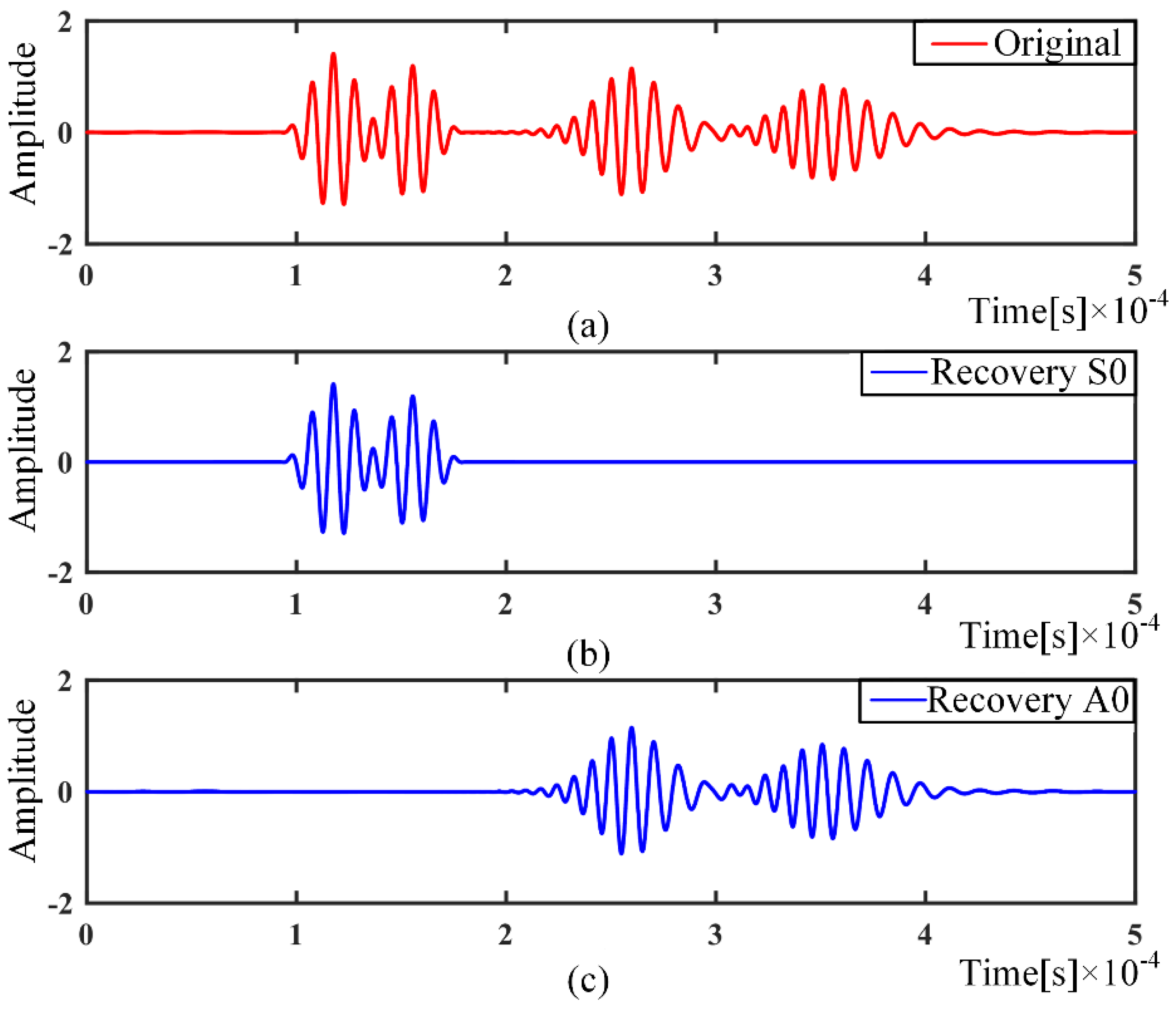
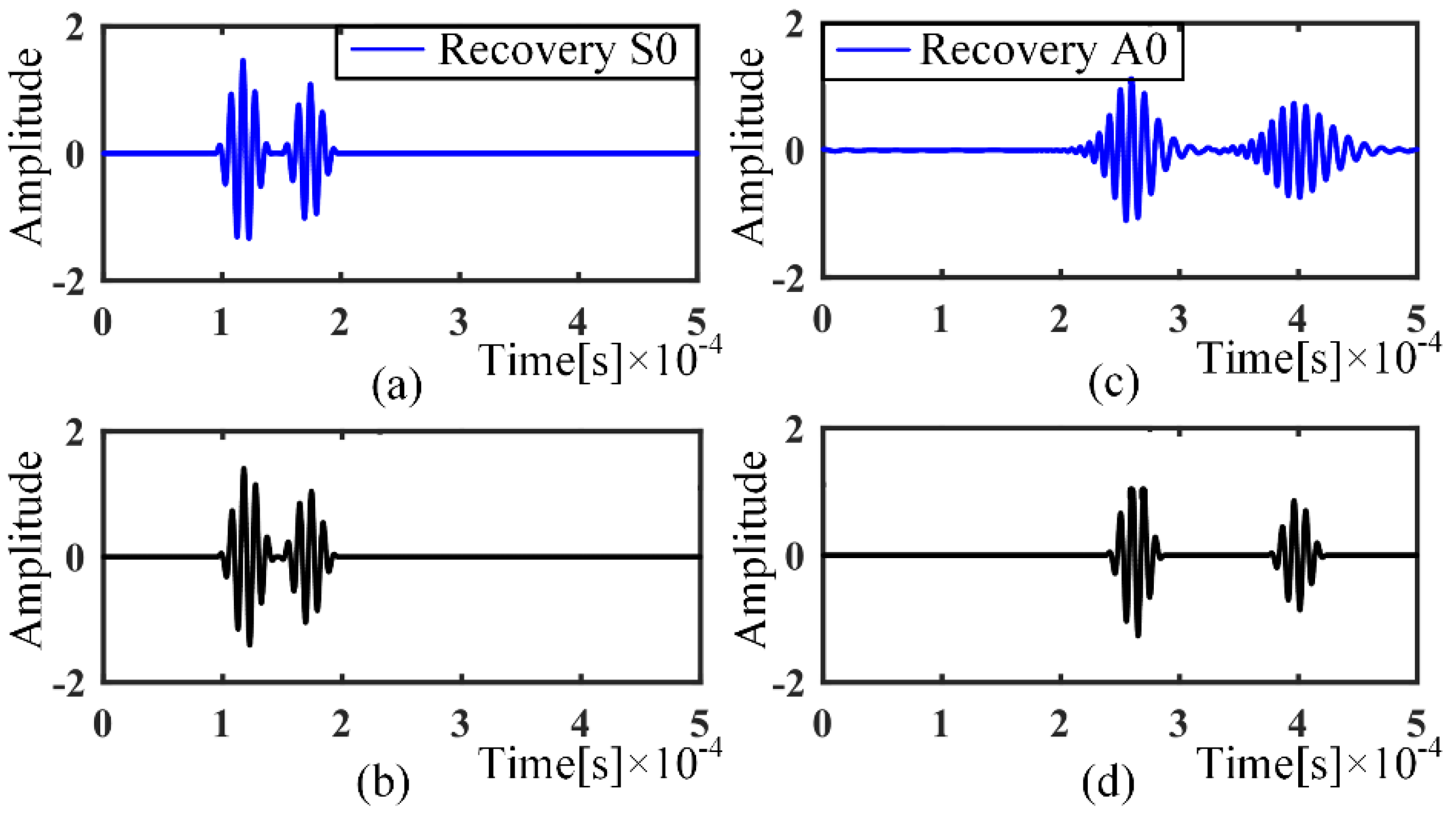
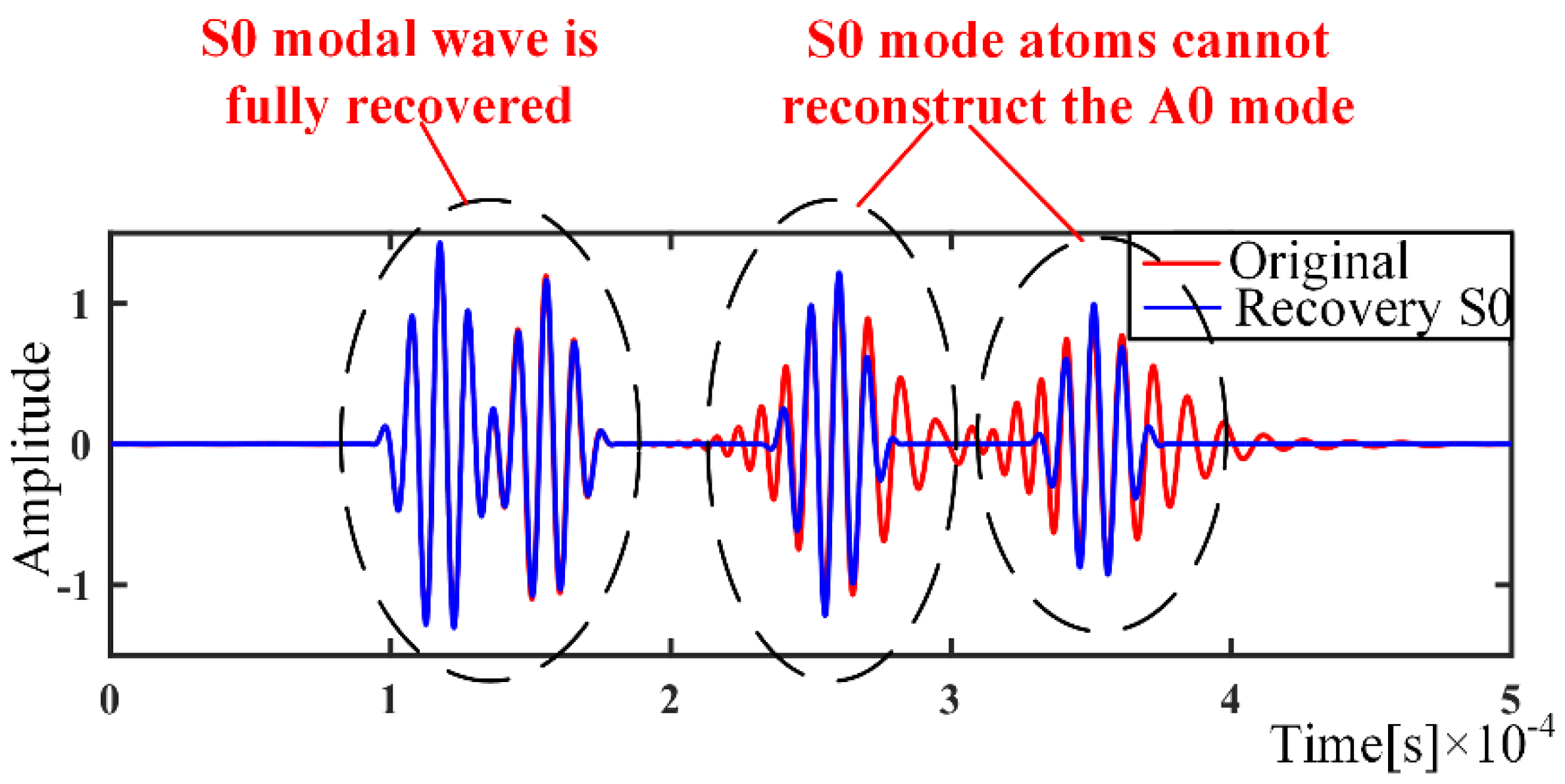
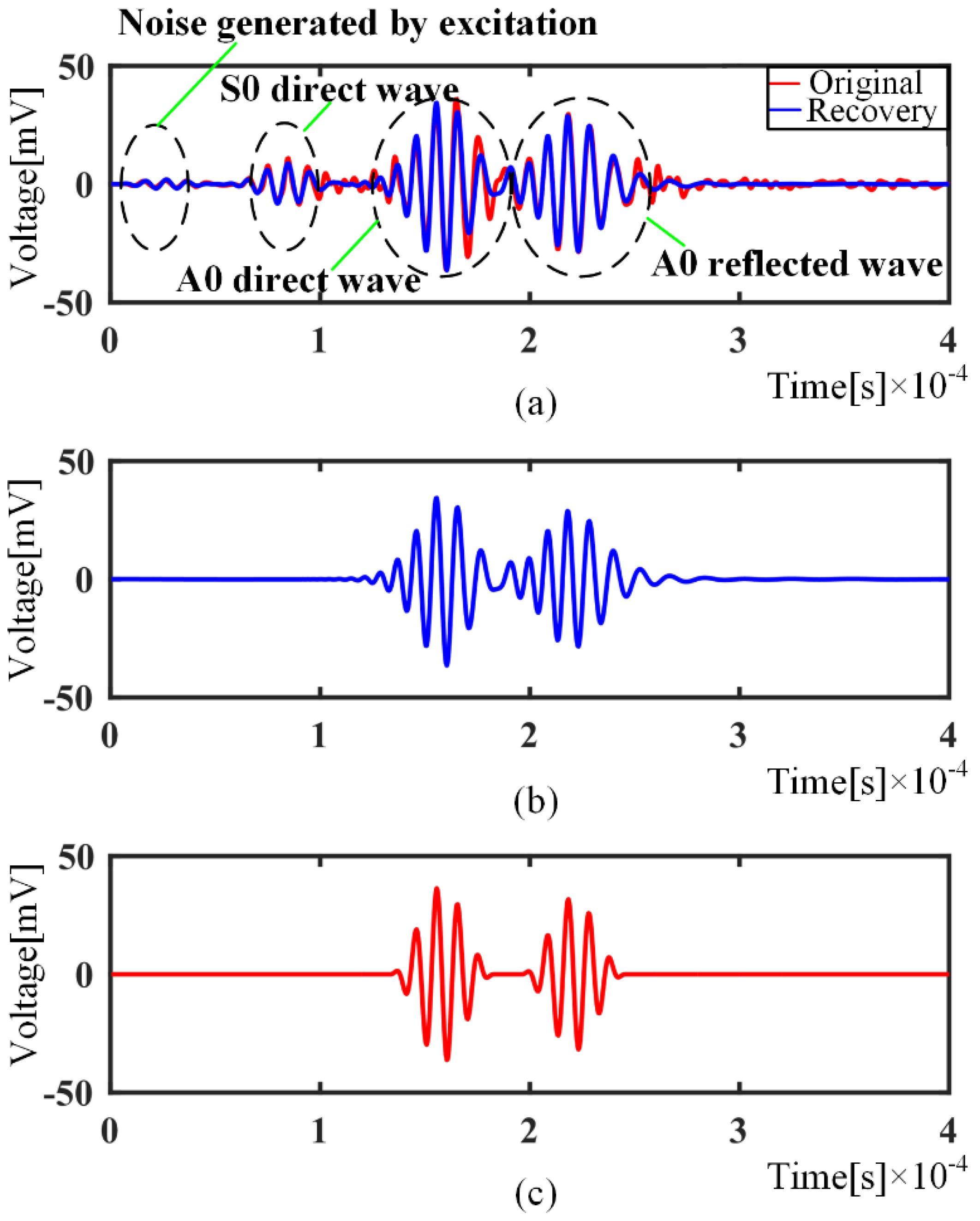
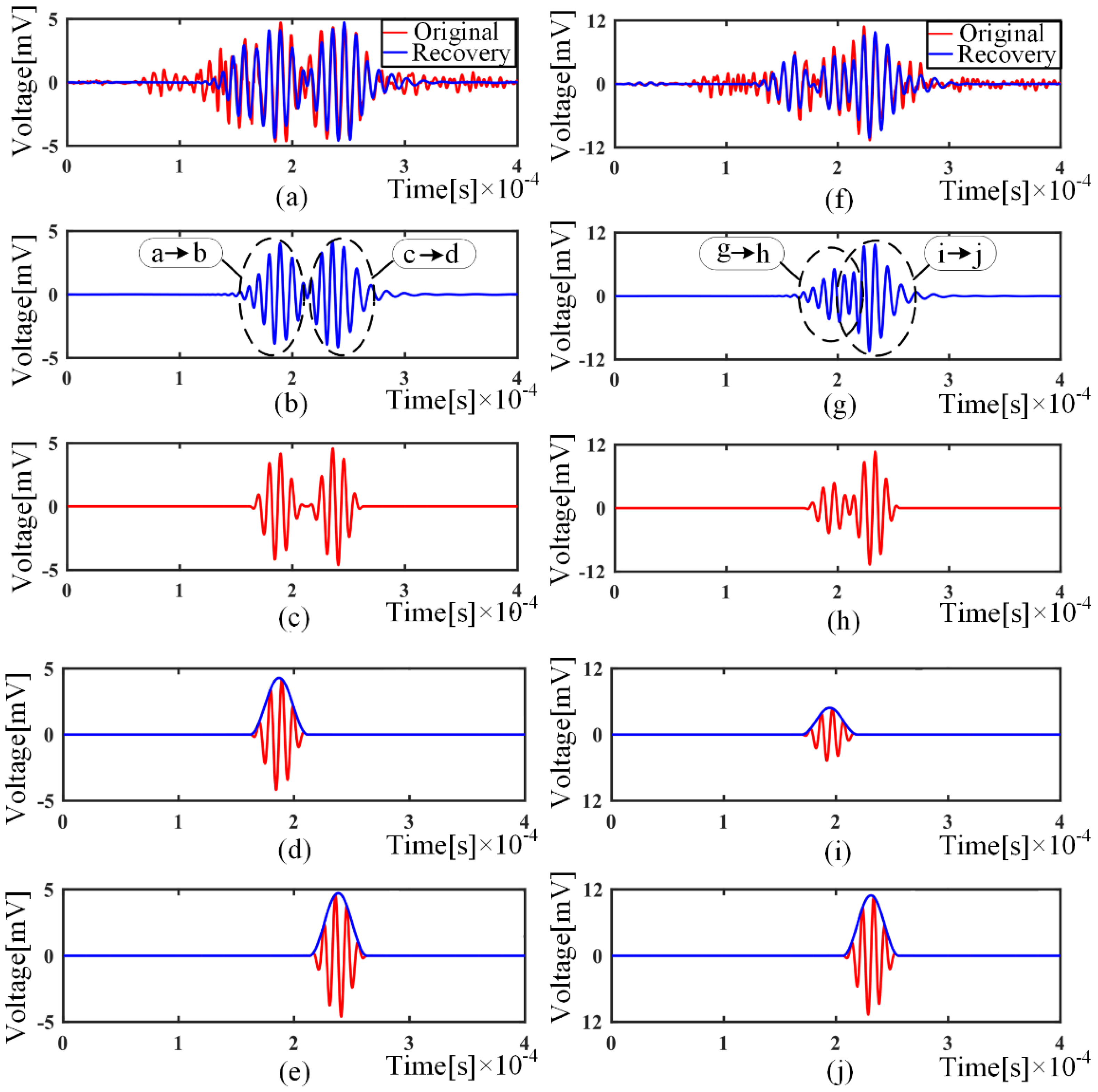
- with the over-completed dictionaries of A0 and S0 mode, the OMP-based algorithm can separate wave packets from collected signals, even if the wave packets are overlapped. Thereafter, with the nondispersive dictionaries, the dispersion part is removed, which transforms the deformed wave packets to the original excitation signal.
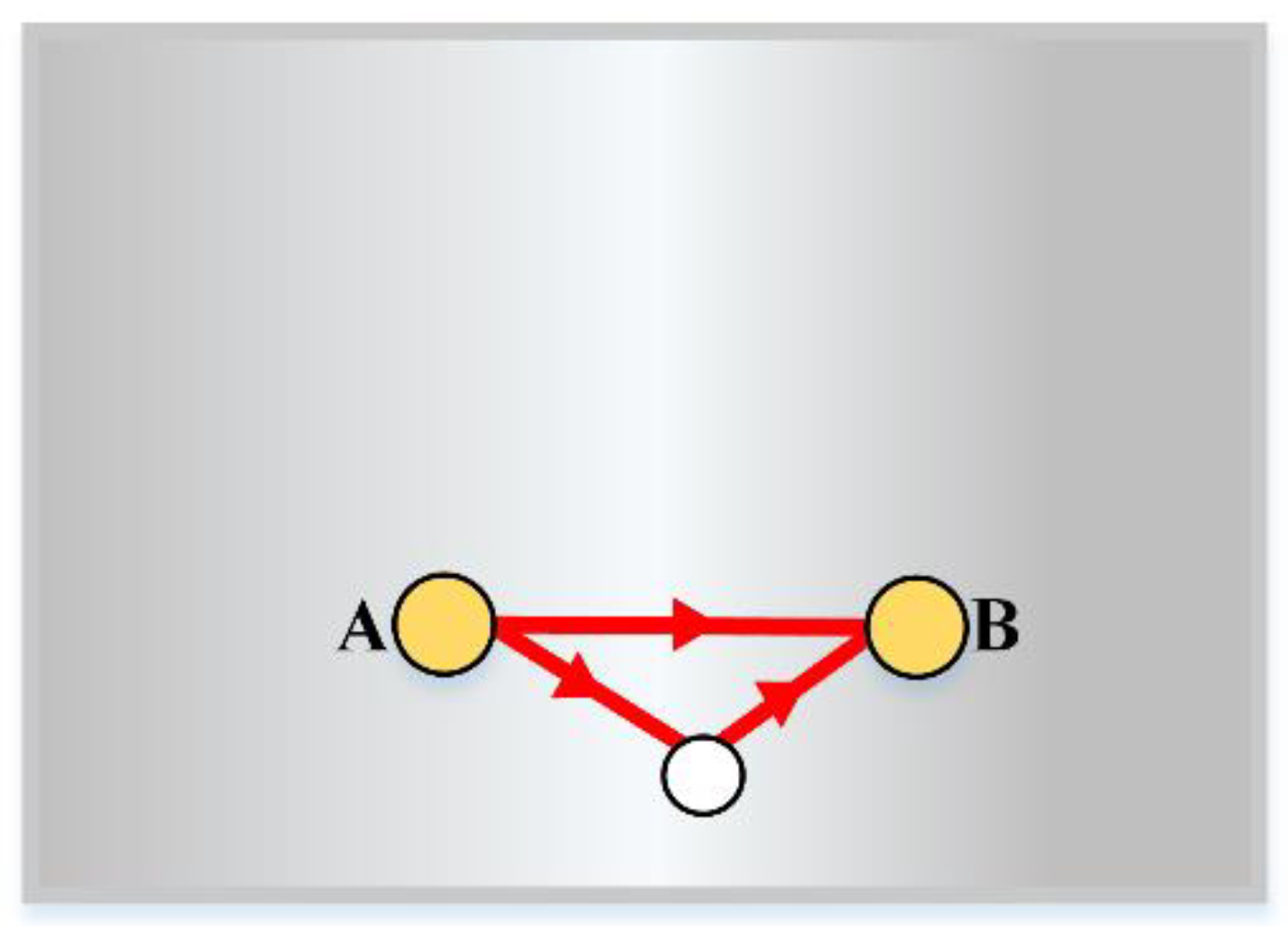
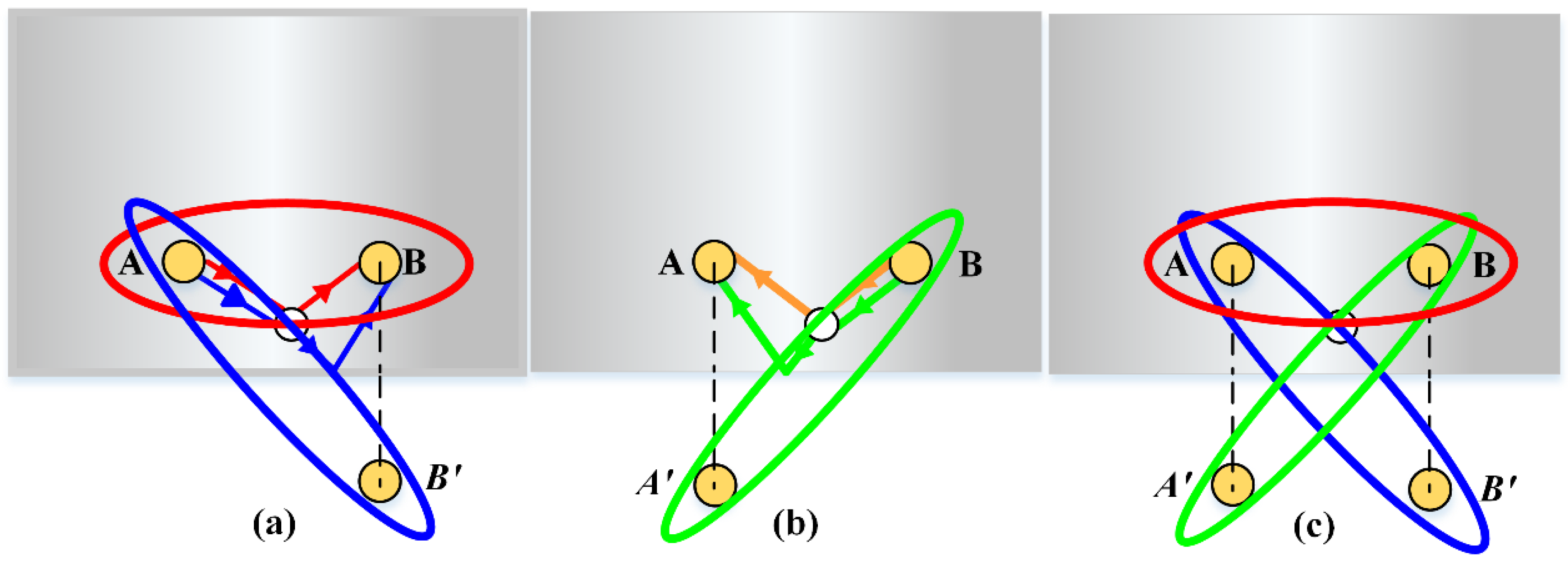
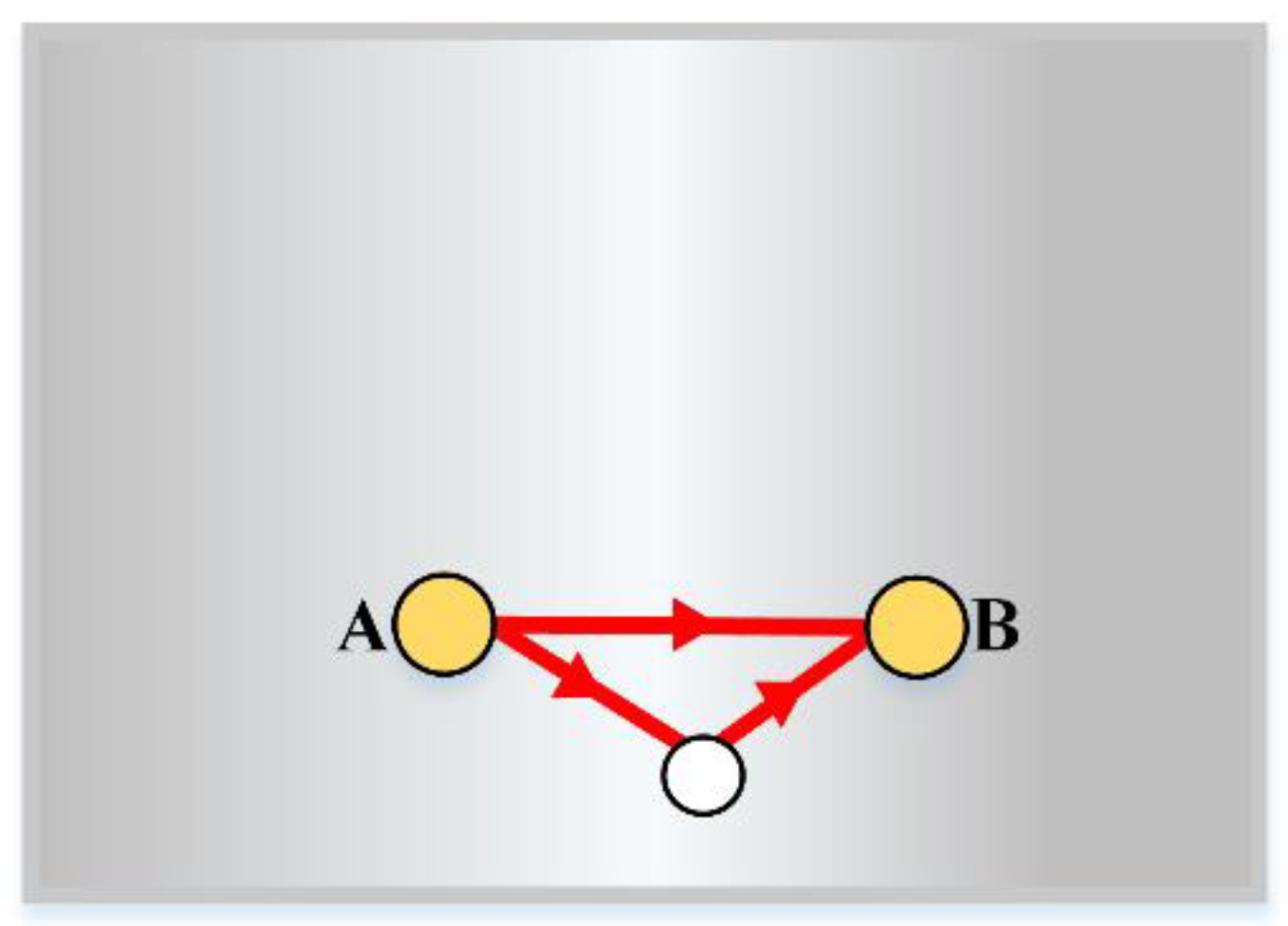
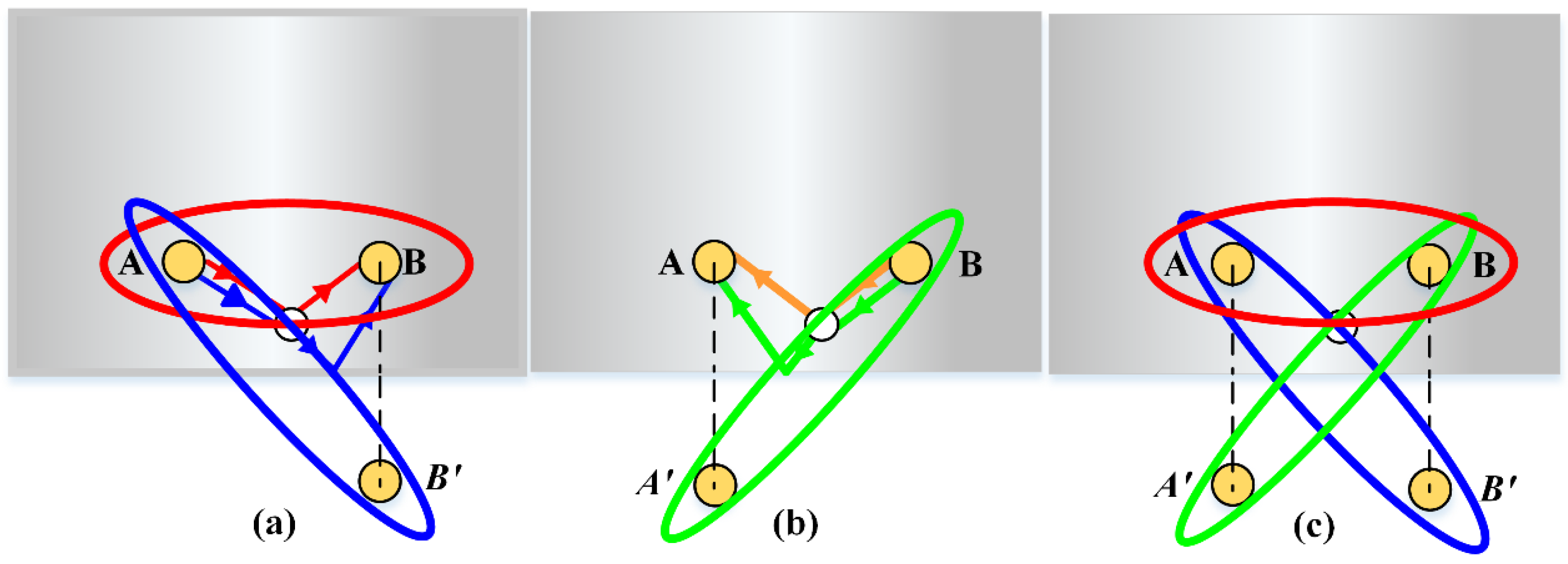
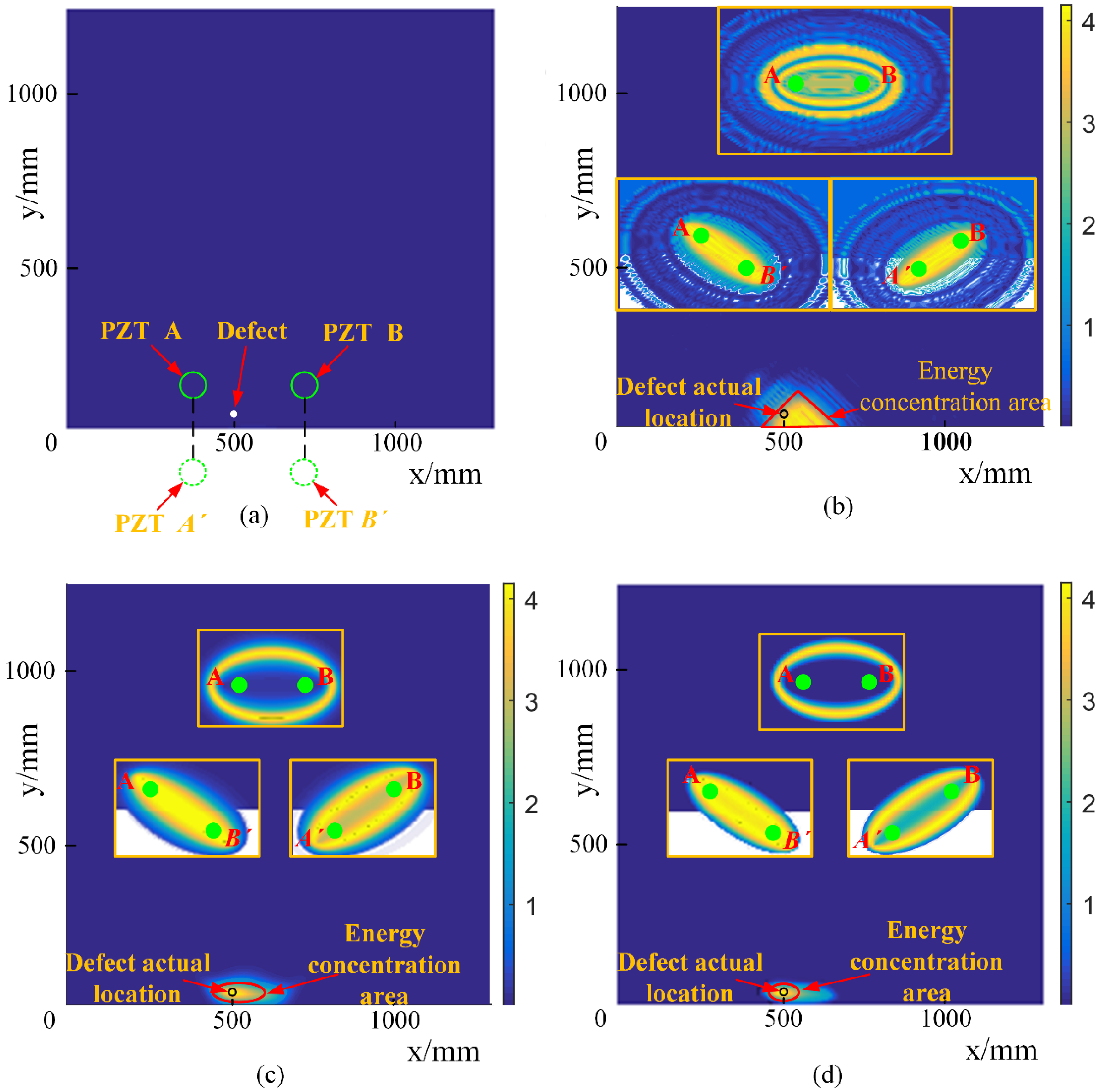
- the wave packets reflected by the defect and edge are innovatively used for defect localization, which is the equivalent of mounting a virtual sensor at the mirroring position. The use of these multipath wave packets is beneficial for reducing the use of transducers.
- the dispersion-removed wave packets of multipath can localize the defect position and improve the resolution of defect localization.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Zhongqing, S.; Lin, Y.; Ye, L. Guided lamb waves for identification of damage in composite structures: A review. J. Sound Vib. 2006, 295, 753–780. [Google Scholar]
- Rose, J.L. A baseline and vision of ultrasonic guided wave inspection potential. J. Press. Ves. Technol. 2002, 124, 273–282. [Google Scholar] [CrossRef]
- Wang, B.; Lin, X. Study of scattering characteristics of Lamb wave-defect interaction. Intern. Combust. Engine Parts 2020, 18, 3–4. [Google Scholar]
- Caibin, X.; Jishuo, W.; Shenxin, Y. A focusing MUSIC algorithm for baseline-free Lamb wave damage localization. Mech. Syst. Signal. Process. 2021, 164, 108242. [Google Scholar]
- Wang, C.H.; Rose, J.T.; Change, F. A synthetic time-reversal imaging method for structural health monitoring. Smart Mater. Struct. 2004, 13, 415–423. [Google Scholar] [CrossRef]
- Hall, J.S.; Michaels, J.E. Multipath ultrasonic guided wave imaging in complex structures. Struct. Health Monit. 2015, 14, 345–358. [Google Scholar] [CrossRef]
- Croxford, A.J.; Wilcox, P.D.; Drinkwater, B.W. Guided wave SHM with adistributed sensor network. Health Monit. Struct. Biol. Syst. 2008, 6935, 69350E. [Google Scholar]
- Perelli, A.; de Marchi, L.; Flamigni, L. Best basis compressive sensing of guided waves in structural health monitoring. Digit. Signal Process. 2015, 42, 35–42. [Google Scholar] [CrossRef]
- Ebrahimkhanlou, A.; Dubuc, B.; Salamone, S. Damage localization in metallic plate structures using edge-reflected lamb waves. Smart Mater. Struct. 2016, 25, 085035. [Google Scholar] [CrossRef] [Green Version]
- Supreet, A.K.; Joseph, M.; Harley, J.B. Baseline-free guided wave damage detection with surrogate data and dictionary learning. J. Acoust. Soc. Am. 2018, 143, 3807–3818. [Google Scholar]
- Golato, A.; Ahmad, F.; Santhanam, S.; Amin, M.G. Defect classification in sparsity-based structural health monitoring. In Proceedings of the Conference on Compressive Sensing VI—From Diverse Modalities to Big Data Analytics, Anaheim, CA, USA, 13–14 April 2017. [Google Scholar]
- Xu, C.B.; Yang, Z.B.; Chen, X.F.; Tian, S.H.; Xie, Y. A guided wave dispersion compensation method based on compressed sensing. Mech. Syst. Signal. Process. 2018, 103, 89–104. [Google Scholar] [CrossRef]
- Xu, C.; Yang, Z.; Qiao, B.; Chen, X. Sparse estimation of propagation distances in Lamb wave inspection. Meas. Sci. Technol. 2019, 30, 055601. [Google Scholar] [CrossRef]
- Xu, C.; Yang, Z.; Qiao, B.; Chen, X. A parameter estimation based sparse representation approach for mode separation and dispersion compensation of Lamb waves in isotropic plate. Smart Mater. Struct. 2020, 29, 035020. [Google Scholar] [CrossRef]
- Mallat, S.; Zhang, Z. Matching pursuit with time-frequency dictionaries. IEEE Trans. Signal. Process. 1993, 41, 3397–3415. [Google Scholar] [CrossRef] [Green Version]
- Hao, L.; Zhongke, Y.; Jianying, W. Convergence research of orthogonal matching pursuit algorithm. Microcomput. Inf. 2008, 3, 209–210. [Google Scholar]
- Hua, J.; Gao, F.; Zeng, L.; Lin, J. Modified sparse reconstruction imaging of lamb waves for damage quantitative evaluation. NDT E Int. 2019, 107, 102143. [Google Scholar] [CrossRef]
- Xu, C.; Yang, Z.; Deng, M. Weighted Structured Sparse Reconstruction-Based Lamb Wave Imaging Exploiting Multipath Edge Reflections in an Isotropic Plate. Sensors 2020, 20, 3502. [Google Scholar] [CrossRef]
- Hua, J.; Gao, F.; Zeng, L.; Lin, J. Sparse reconstruction imaging of damage for Lamb wave simultaneous excitation system in composite laminates. Measurement 2018, 136, 102143. [Google Scholar] [CrossRef]
- Pati, Y.; Rezaiifar, R.; Krishnaprasad, P. Orthogonal matching pursuit: Recursive function approximation with applications to wavelet decomposition. In Proceedings of the IEEE Asilomar Conference on Signals, Systems, and Computers, Los Alamitos, CA, USA, 1–3 November 1993; Volume 1, pp. 40–44. [Google Scholar]
- Mu, W.; Sun, J.; Liu, G.; Wang, S. High-resolution crack localization approach based on diffraction wave. Sensors 2019, 19, 1951. [Google Scholar] [CrossRef] [Green Version]
- Viktorov, I. Rayleigh and Lamb Waves (Physical Theory and Applications); PlenumPress: New York, NY, USA, 1967; pp. 123–135. [Google Scholar]
- Harley, J.B.; Moura, J.M.F. Sparse recovery of the multimodal and dispersive characteristics of Lamb waves. J. Acoust. Soc. Am. 2013, 133, 2732–2745. [Google Scholar] [CrossRef]
- Zhao, X.; Gao, H.; Zhang, G. Active health monitoring of an aircraft wing with embedded piezoelectric sensor/actuator network: I. Defect detection, localization and growth monitoring. Smart Mater. Struct. 2007, 16, 1208–1217. [Google Scholar] [CrossRef]
- Kim, H.; Yuan, F. Enhanced damage imaging of a metallic plate using matching pursuit algorithm with multiple wavepaths. Ultrasonics 2018, 89, 84–101. [Google Scholar] [CrossRef] [PubMed]
- Michaels, J.E.; Michaels, T.E. Detection of structural damage from the local temporal coherence of diffuse ultrasonic signals. IEEE Trans. Ultrason. Ferroelectr. Freq. Control. 2005, 52, 1769–1782. [Google Scholar] [CrossRef] [PubMed]
- Mu, W.; Sun, J.; Xin, R.; Liu, G.; Wang, S. Time reversal damage localization method of ocean platform based on particle swarm optimization algorithm. Mar. Struct. 2020, 69, 102672. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Material | Density (kg/m3) | Elastic Modulus (Pa) | Poisson’s Ratio |
|---|---|---|---|
| Q235 | 7800 | 2.1 × 1011 | 0.33 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Mu, W.; Gao, Y.; Liu, G. Ultrasound Defect Localization in Shell Structures with Lamb Waves Using Spare Sensor Array and Orthogonal Matching Pursuit Decomposition. Sensors 2021, 21, 8127. https://doi.org/10.3390/s21238127
Mu W, Gao Y, Liu G. Ultrasound Defect Localization in Shell Structures with Lamb Waves Using Spare Sensor Array and Orthogonal Matching Pursuit Decomposition. Sensors. 2021; 21(23):8127. https://doi.org/10.3390/s21238127
Chicago/Turabian StyleMu, Weilei, Yuqing Gao, and Guijie Liu. 2021. "Ultrasound Defect Localization in Shell Structures with Lamb Waves Using Spare Sensor Array and Orthogonal Matching Pursuit Decomposition" Sensors 21, no. 23: 8127. https://doi.org/10.3390/s21238127
APA StyleMu, W., Gao, Y., & Liu, G. (2021). Ultrasound Defect Localization in Shell Structures with Lamb Waves Using Spare Sensor Array and Orthogonal Matching Pursuit Decomposition. Sensors, 21(23), 8127. https://doi.org/10.3390/s21238127