
Dance Tempo Estimation Using a Single Leg-Attached 3D Accelerometer


Abstract
:1. Introduction
2. Materials and Methods
2.1. Data Acquisition
2.1.1. Materials
2.1.2. Measurements
2.2. Signal Processing
2.2.1. Signal Pre-Processing
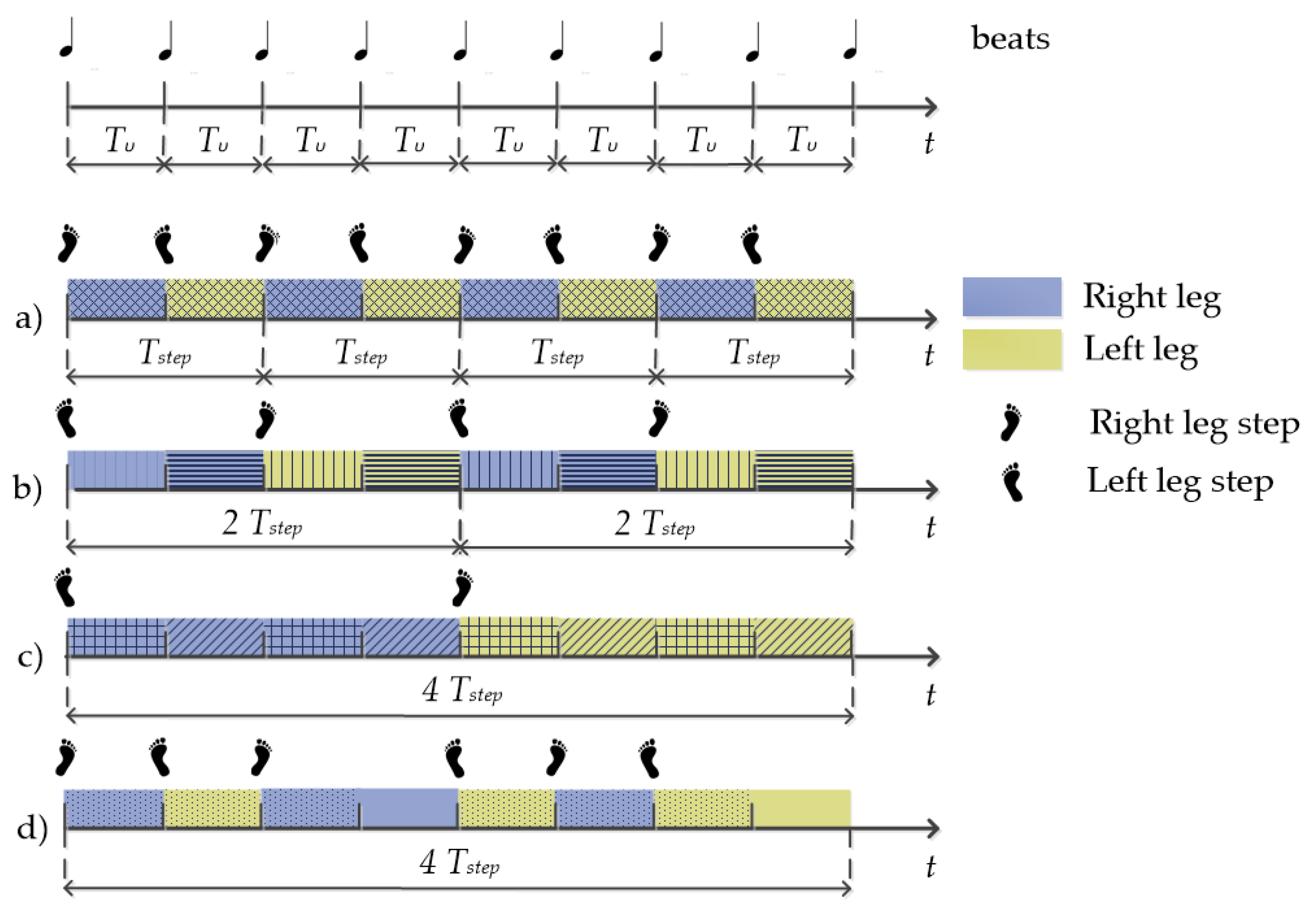
2.2.2. Dance Tempo Estimation
2.3. Validation
3. Results and Discussion
3.1. Overall Dance Tempo Estimation
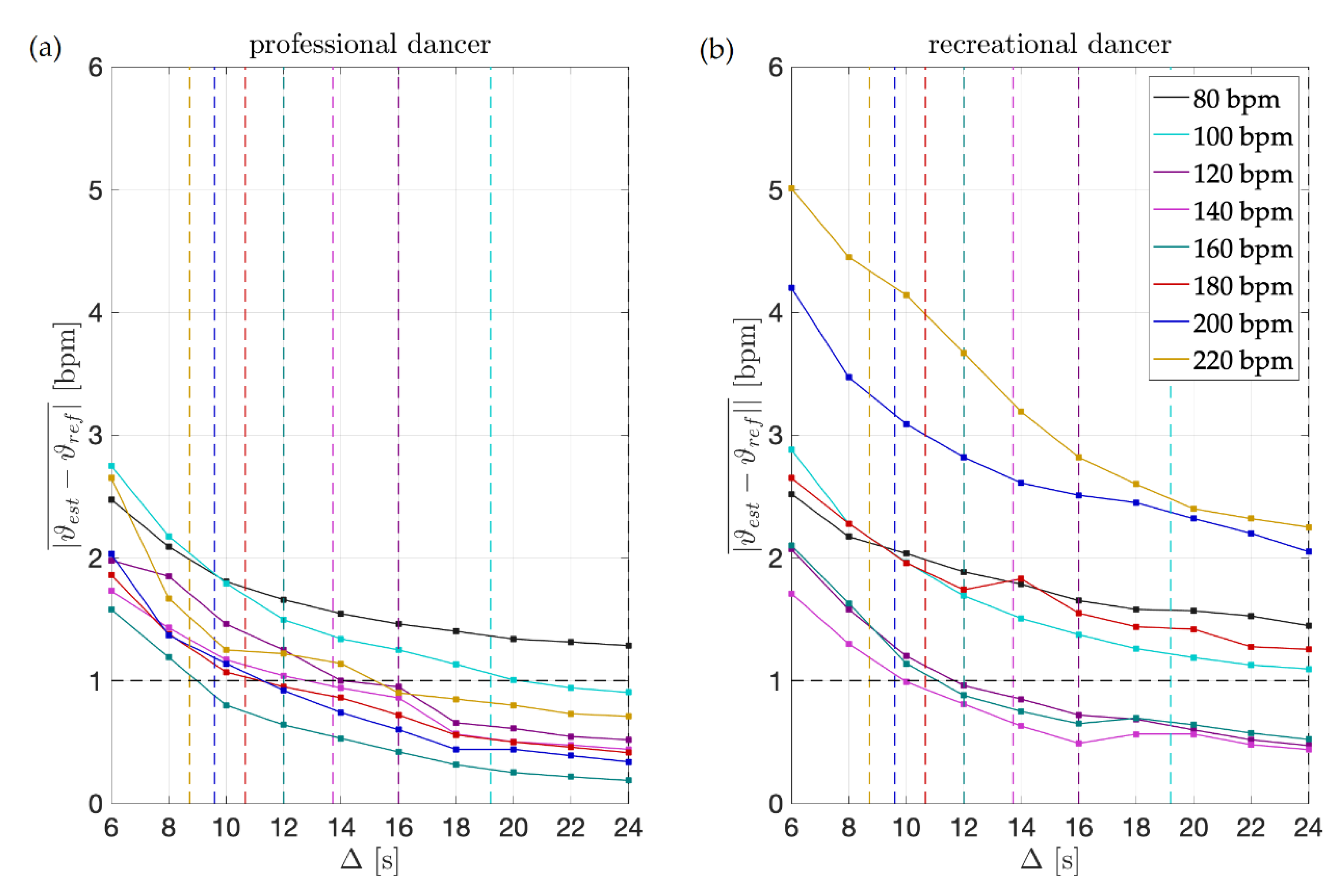
3.2. Dance Tempo Estimation for Short Excerpts
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Kyan, M.; Sun, G.; Li, H.; Zhong, L.; Muneesawang, P.; Dong, N.; Elder, B.; Guan, L. An Approach to Ballet Dance Training through MS Kinect and Visualization in a CAVE Virtual Reality Environment. ACM Trans. Intell. Syst. Technol. 2015, 6, 1–37. [Google Scholar] [CrossRef]
- Aich, A.; Mallick, T.; Bhuyan, H.B.G.S.; Das, P.; Majumdar, A.K. NrityaGuru: A dance tutoring system for bharatanatyam usingkinect. In Computer Vision, Pattern Recognition, Image Processing, and Graphics; Rameshan, R., Arora, C., Dutta Roy, S., Eds.; Springer: Singapore, 2018; pp. 481–493. [Google Scholar] [CrossRef]
- Dos Santos, A.D.P.; Yacef, K.; Martinez-Maldonado, R. Let’s dance: How to build a user model for dance students using wearable technology. In Proceedings of the 25th Conference on User Modeling, Adaptation and Personalization, Bratislava, Slovakia, 9–12 July 2017; pp. 183–191. [Google Scholar] [CrossRef]
- Drobny, D.; Weiss, M.; Borchers, J. Saltate!: A sensor-based system to support dance beginners. In Proceedings of the the 27th Annual CHI Conference on Human Factors in Computing Systems, Boston, MA, USA, 4–9 April 2009; pp. 3943–3948. [Google Scholar] [CrossRef]
- Romano, G.; Schneider, J.; Drachsler, H. Dancing Salsa with Machines—Filling the Gap of Dancing Learning Solutions. Sensors 2019, 19, 3661. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Ho, C.; Tsai, W.; Lin, K.; Chen, H.H. Extraction and alignment evaluation of motion beats for street dance. In Proceedings of the IEEE International Conference on Acoustics, Speech and Signal Processing, Vancouver, BC, Canada, 26–31 May 2013; pp. 2429–2433. [Google Scholar] [CrossRef]
- Cornacchia, M.; Ozcan, K.; Zheng, Y.; Velipasalar, S. A Survey on Activity Detection and Classification Using Wearable Sensors. IEEE Sens. J. 2017, 17, 386–403. [Google Scholar] [CrossRef]
- Lara, O.D.; Labrador, M.A. A Survey on Human Activity Recognition using Wearable Sensors. IEEE Commun. Surv. Tutor. 2013, 15, 1192–1209. [Google Scholar] [CrossRef]
- Sousa Lima, W.; Souto, E.; El-Khatib, K.; Jalali, R.; Gama, J. Human Activity Recognition Using Inertial Sensors in a Smartphone: An Overview. Sensors 2019, 19, 3213. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Sprager, S.; Juric, M.B. Inertial Sensor-Based Gait Recognition: A Review. Sensors 2015, 15, 22089–22127. [Google Scholar] [CrossRef] [PubMed]
- Paradiso, J.A.; Hsiao, K.; Benbasat, A.Y.; Teegarden, Z. Design and implementation of expressive footwear. IBM Syst. J. 2000, 39, 511–529. [Google Scholar] [CrossRef] [Green Version]
- Aylward, R.; Lovell, S.D.; Paradiso, J.A. A Compact, Wireless, Wearable Sensor Network for Interactive Dance Ensembles. In Proceedings of the International Workshop on Wearable and Implantable Body Sensor Networks, Cambridge, MA, USA, 3–5 April 2006. [Google Scholar] [CrossRef] [Green Version]
- Hasan, M.; Shimamura, T.A. Fundamental Frequency Extraction Method Based on Windowless and Normalized Autocorrelation Functions. In Proceedings of the 6th WSEAS International Conference on Computer Engineering and Applications, and Proceedings of the 2012 American Conference on Applied Mathematics.
- Liu, D.J.; Lin, C.T. Fundamental frequency estimation based on the joint time-frequency analysis of harmonic spectral structure. IEEE Trans. Speech Audio Process. 2001, 9, 609–621. [Google Scholar] [CrossRef]
- Ferreira, J.L.; Wu, Y.; Aarts, R.M. Enhancement of the Comb Filtering Selectivity Using Iterative Moving Average for Periodic Waveform and Harmonic Elimination. J. Healthc. Eng. 2018, 7901502. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Braun, S. The synchronous (time domain) average revisited. Mech. Syst. Signal Process. 2011, 25, 1087–1102. [Google Scholar] [CrossRef]
- Eyben, F.; Schuller, B.; Reiter, S.; Rigoll, G. Wearable assistance for the ballroom-dance hobbyist holistic rhythm analyis and dance-style classification. In Proceedings of the 2007 IEEE International Conference on Multimedia and Expo, Beijing, China, 2–5 July 2007; pp. 92–95. [Google Scholar] [CrossRef]
- Mbientlab MMR. Available online: https://mbientlab.com/metamotionr/ (accessed on 21 September 2021).
- Alphabetical Jazz Steps 3. Available online: https://www.youtube.com/watch?v=jAIwJd2tQo0&list=PLpLDojUPSMvcYMA7jEFPidEbSD2-vNz8m (accessed on 5 April 2021).
- Stančin, S.; Tomažič, S. Time- and Computation-Efficient Calibration of MEMS 3D Accelerometers and Gyroscopes. Sensors 2014, 14, 14885–14915. [Google Scholar] [CrossRef] [PubMed] [Green Version]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Metronome Tempo (bpm) | Estimated Tempo (bpm) | Absolute Tempo Difference (bpm) | |
|---|---|---|---|
| Professional Dancer | Recreational Dancer | ||
| 80 | 80 | 80 |  |
| 100 | 100 | 100 | |
| 120 | 121 | 120 | |
| 140 | 140 | 140 | |
| 160 | 160 | 160 | |
| 180 | 180 | 180 | |
| 200 | 200 | 200 | |
| 220 | 220 | 220 | |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Stančin, S.; Tomažič, S. Dance Tempo Estimation Using a Single Leg-Attached 3D Accelerometer. Sensors 2021, 21, 8066. https://doi.org/10.3390/s21238066
Stančin S, Tomažič S. Dance Tempo Estimation Using a Single Leg-Attached 3D Accelerometer. Sensors. 2021; 21(23):8066. https://doi.org/10.3390/s21238066
Chicago/Turabian StyleStančin, Sara, and Sašo Tomažič. 2021. "Dance Tempo Estimation Using a Single Leg-Attached 3D Accelerometer" Sensors 21, no. 23: 8066. https://doi.org/10.3390/s21238066
APA StyleStančin, S., & Tomažič, S. (2021). Dance Tempo Estimation Using a Single Leg-Attached 3D Accelerometer. Sensors, 21(23), 8066. https://doi.org/10.3390/s21238066