Howling Detection and Suppression Based on Segmented Notch Filtering



Abstract
:1. Introduction
- On the basis of our previous work in [21], this paper proposes a closed-form FIR notch filter design, concurrently satisfying the above four conditions (i.e., arbitrary realizable notching frequency point, sufficiently flat passband, linear phase characteristic and low design complexity);
- Further, to ensure that howling suppression can work continuously while remaining the linear phase characteristic, we design a feasible segmentation based scheme consisting of an energy detector, spectrum corrector and a segmented notch filter;
- This paper actually develops a high-efficiency howling suppression mode, which can not only shorten the howling detection to an extent that a wearer can hardly recognize this accident, but also readily removes the howling without incurring any phase distortions.
2. Howling Generation and the Echo Cancellation Based Removal Method
2.1. Howling Generation
2.2. Problems of the Echo Cancellation Based Removal Method
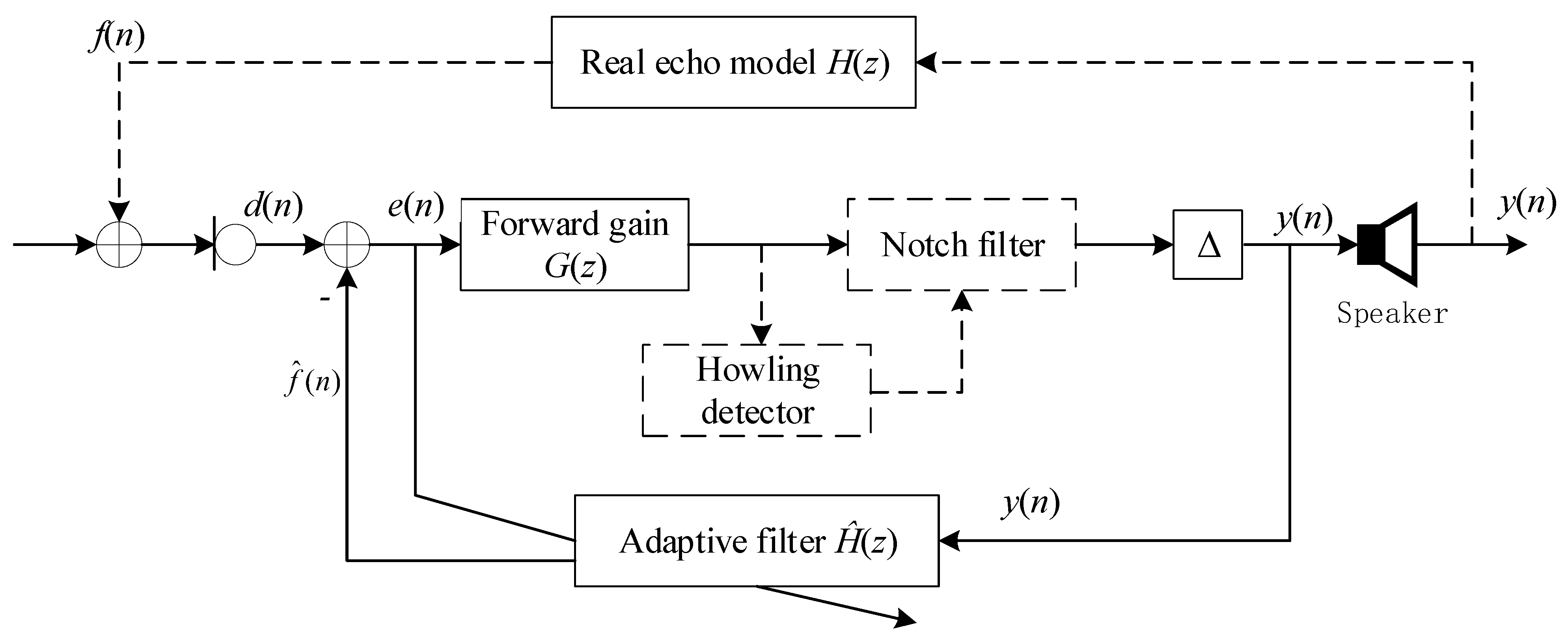
- Since the echo path behaves as significant randomness, its impulse response length can also hardly be predicted, resulting in the adaptive filter being unable to be specified with a fixed length (i.e., the delay amounts in Figure 2 can hardly be properly specified).
- As is well known, any adaptive filter cannot overcome the trade-off between fast convergence and small stable-state residual error. If fast convergence is preferred (with a large adaptive step size specified), large stable-state residual error inevitably exists, resulting in the wearer still feeling the small-level howling after convergence. Nevertheless, if a small stable-state residual error is preferred (with a small adaptive step size specified), this adaptive filter has to experience a long-duration transition process, resulting in the wearer having to also tolerate a long-duration howling.
- Another drawback lies in: as Figure 2 depicted, if does not approximate well, the transfer function is equivalent to an infinite impulsive response system, which potentially hides a risk of instability, once any pole of the denominator of falls outside the unit circle.
3. The Proposed Scheme
3.1. Block Diagram
3.2. Individual Noncore Parts
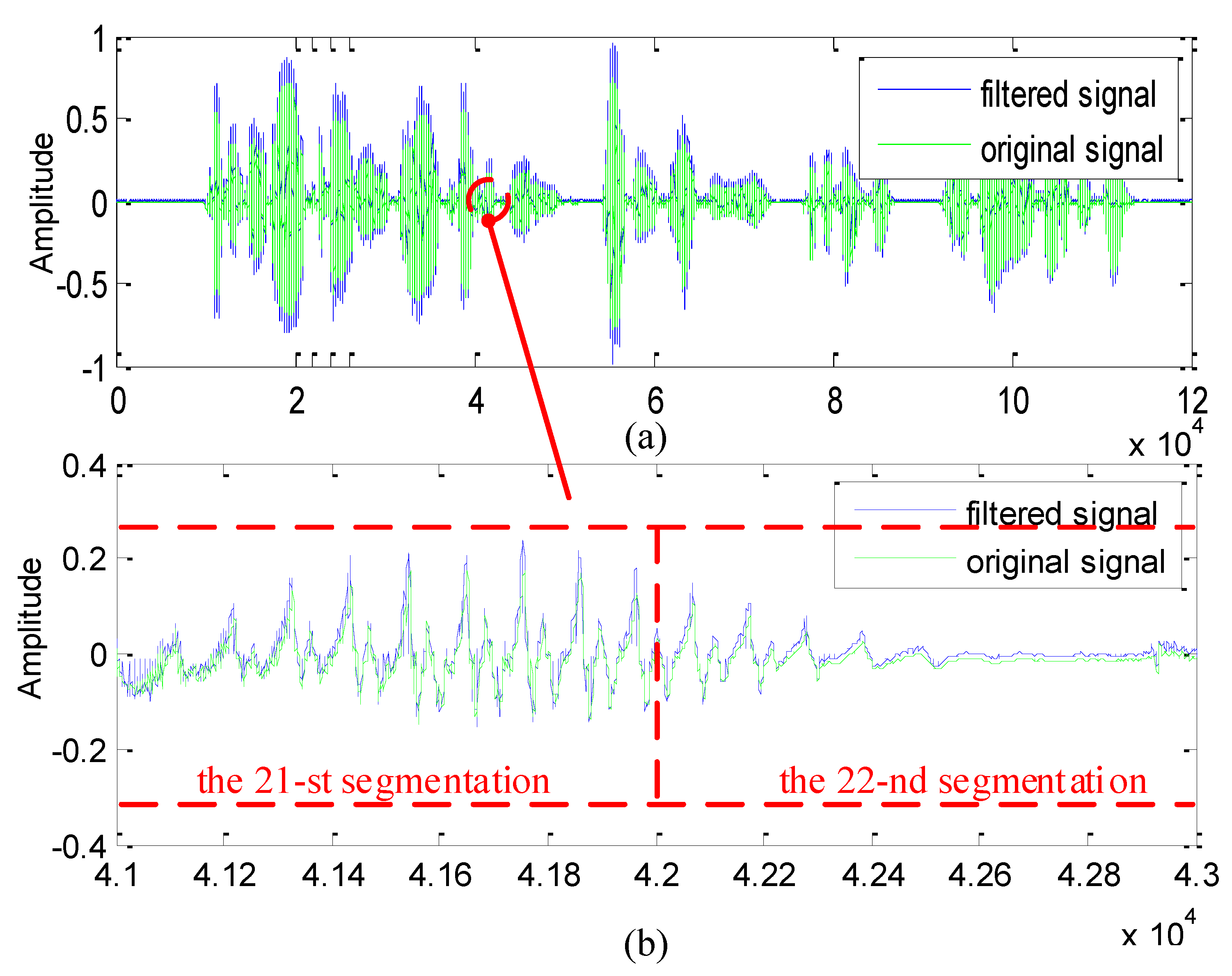
3.2.1. Segmenting and Splicing
3.2.2. Energy Detector
3.2.3. Notch Frequency Estimator
- Step 1 Implement hamming-windowed DFT on the input data segment to acquire the DFT spectra , among which the peak spectral position is recorded as m.
- Step 2 Calculate the amplitude ratio v between and its subpeak neighbor, that is,
- Step 3 Calculate a fractional frequency offset as
4. Design of the Closed-Form Notch Filter
4.1. Requirements of the Notch Filter Design
- To ensure that the hearing aid works efficiently when howling occurs, the notch filter design should be of low complexity;
- To ensure that any howling event is properly dealt with, the notching frequency should be realized at an arbitrary frequency position;
- To ensure that the frequency component of howling is significantly removed, the notch filter should possess large attenuation at the notch frequency;
- To ensure that no speech distortion occurs (especially near the edge of adjacent segments), the notch filter should be of linear-phase characteristic.
4.2. General Convolution Window Based FIR Filter Design
- Step 1 Implement IDFT on a specified frequency vector to acquire . Then, insert the replica of ∼ into the left part of to obtain the extended vector .
- Step 2 Implement normalized convolution between a commonly-used N-length window and an N-length rectangular window to obtain the -length window .
- Step 3 Implement the product on the corresponding elements of and to generate the final filter .
4.3. Derivation of the Closed-Form Notch Filter Design
4.4. Extra Data Extensions for Linear-Phase Characteristic
4.5. Analysis of the Proposed Notch Filter
- The proposed scheme exhibits stronger robustness to the time-varying characteristic of the echo channel (arising from its unpredictability) than the adaptive filter based scheme. When howling happens, both the howling frequency and the time-variant impulse response of the echo channel are essentially the acute reflection of the feedback channel. Meanwhile, the proposed scheme employs a spectrum corrector to estimate the howling frequency, whereas the traditional scheme employs the adaptive filter to track the echo’s impulse response. The former is implemented in the frequency domain, whereas the latter is implemented in the time domain. Hence, the former is more robust.
- The proposed scheme has a better real-time performance than the adaptive filter based scheme. Since our scheme actually only consumes low complexity, all the involved operations are simple (i.e., segmentation and splicing, spectrum correction, closed-form notch filter design and FIR filtering), whereas the latter consumes high complexity for the sake of balancing the trade-off between the parameter settings of step size and the steady-state residual error.
- The proposed scheme can guarantee the linear-phase characteristic, whereas the adaptive filter based scheme cannot. This is because the former adopts a linear-phase closed-form FIR filter design and proper data extension, whereas the latter adopts IIR notch design, which inevitably creates linear-phase distortion.
5. Numerical Results
5.1. Descriptions of Howling Suppression Generation
5.2. Comparison between the Proposed Notch Filter and the Conventional IIR Notch Filter
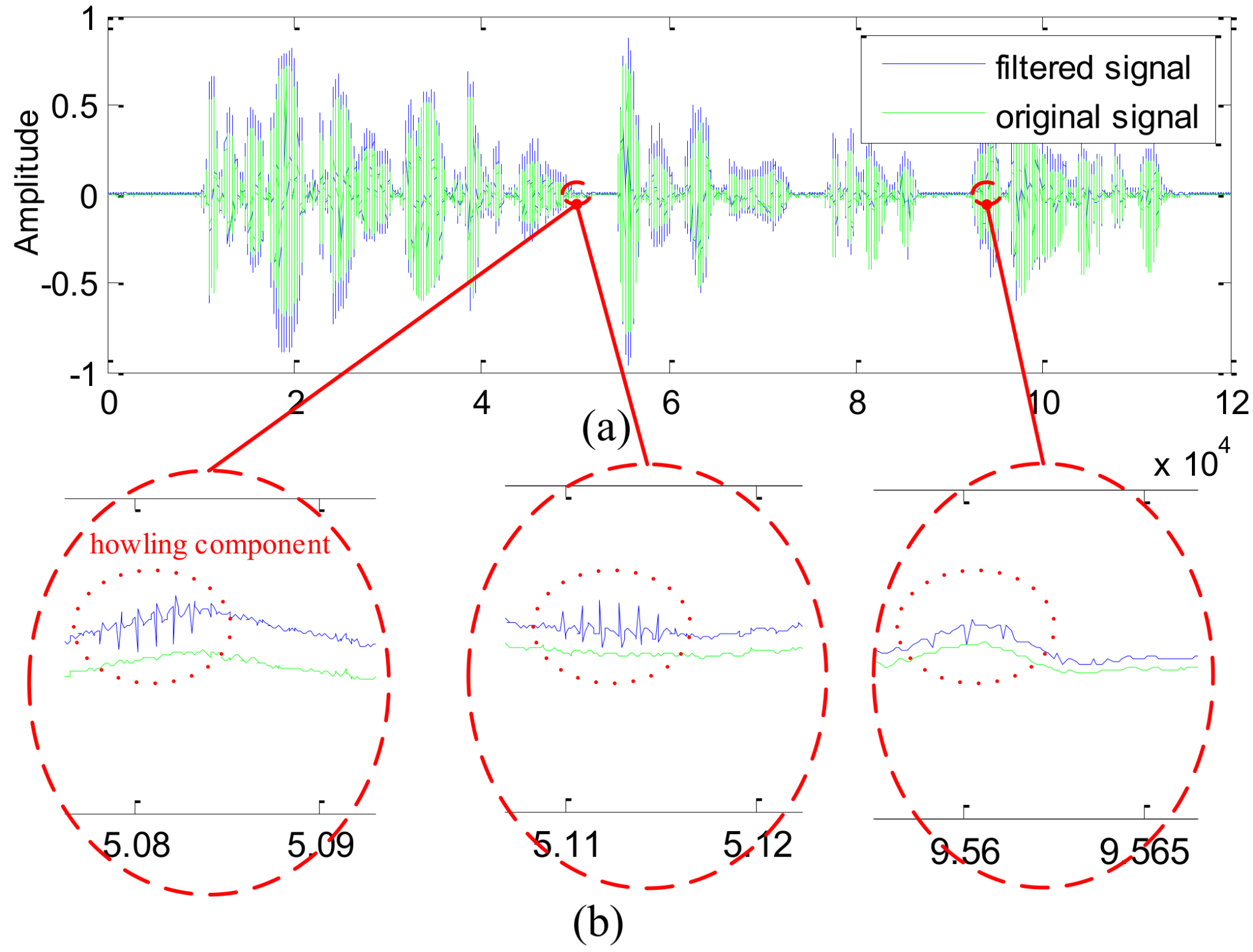
- The transitional band of the IIR notch filter is slightly wider than that of the proposed filter, which inevitably damages more useful frequency components near the notch position.
- Focusing on the notching position, the attenuation value of the IIR filter is about dB, whereas the attenuation value of the proposed filter is lower than dB. As a result, the howling component still appears on the former recovered waveform (see the enlarged waveform in Figure 9b), whereas no howling component is visible on the latter recovered waveform (see the enlarged waveform in Figure 10b).
5.3. Demonstration of the Proposed Closed-Form Notch Filter Based Scheme
5.4. Comparison of Different Howling Frequencies
5.5. Comparison of Different Filter Orders
5.6. Comparison of Different Data Extension Lengths
5.7. Demonstration of Linear-Phase Recovery Effect
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Appendix A
References
- Dhawan, R.; Mahalakshmi, P. Digital filtering in hearing aid system for the hearing impaired. In Proceedings of the 2016 International Conference on Electrical, Electronics, and Optimization Techniques (ICEEOT), Chennai, India, 3–5 March 2016; pp. 1494–1497. [Google Scholar]
- Mullins, K.A. Design of a digital hearing aid. In Proceedings of the IEEE Technical Applications Conference (Northcon/96), Conference Record, Seattle, WA, USA, 4–6 November 1996; pp. 281–284. [Google Scholar]
- Luo, H.; Arndt, H. Digital signal processing technology and applications in hearing aids. In Proceedings of the 6th International Conference on Signal Processing, Beijing, China, 26–30 August 2002; Volume 2, pp. 1727–1730. [Google Scholar]
- Shen, H.; Zhang, L. A new variable step-size algorithm onacoustic feedback suppression for digital hearing aids. In Proceedings of the 2014 International Conference on Audio, Language and Image Processing, Shanghai, China, 7–9 July 2014; pp. 171–175. [Google Scholar]
- Crummer, R.W.; Hassan, G.A. Diagnostic approach to tinnitus. Am. Fam. Physician 2004, 69, 120–126. [Google Scholar]
- Chung, K. Challenges and recent developments in hearing aids: Part ii. feedback and occlusion effect reduction strategies, laser shell manufacturing processes, and other signal processing technologies. Trends Amplif. 2004, 8, 125–164. [Google Scholar] [CrossRef] [Green Version]
- Ngo, K.; Waterschoot, T.V.; Christensen, M.G.; Moonen, M.; Jensen, S.H. Improved prediction error filters for adaptive feedback cancellation in hearing aids. Signal Process. 2013, 93, 3062–3075. [Google Scholar] [CrossRef] [Green Version]
- Ma, G.; Gran, F.; Jacobsen, F.; Agerkvist, F.T. Adaptive feedback cancellation with band-limited LPC vocoder in digital hearing aids. IEEE Trans. Audio Speech Lang. Process. 2011, 19, 677–687. [Google Scholar]
- Guo, M.; Jensen, S.H.; Jensen, J. Novel acoustic feedback cancellation approaches in hearing aid applications using probe noise and probe noise enhancement. IEEE Trans. Audio Speech Lang. Process. 2012, 20, 2549–2563. [Google Scholar] [CrossRef]
- Strasser, F.; Puder, H. Adaptive feedback cancellation for realistic hearing aid applications. IEEE/ACM Trans. Audio Speech Lang. 2015, 23, 2322–2333. [Google Scholar] [CrossRef]
- Friedlander, B.; Smith, J. Analysis and performance evaluation of an adaptive notch filter. IEEE Trans. Inf. Theory 1984, 30, 283–295. [Google Scholar] [CrossRef]
- Borio, D. Loop analysis of adaptive notch filters. IET Signal Process. 2016, 10, 659–669. [Google Scholar] [CrossRef]
- Waterschoot, T.; Moonen, M. Fifty years of acoustic feedback control: State of the art and future challenges. Proc. IEEE 2011, 99, 288–327. [Google Scholar] [CrossRef]
- Hamidia, M.; Amrouche, A. Improved variable step-size nlms adaptive filtering algorithm for acoustic echo cancellation. Digit. Signal Process. 2016, 49, 44–55. [Google Scholar] [CrossRef]
- Liang, R.; Wang, X.; Wang, Q.; Zou, C. A joint echo cancellation algorithm for quick suppression of howls in hearing aids. IEEJ Trans. Electr. Electron. Eng. 2017, 12, 565–574. [Google Scholar] [CrossRef]
- Sogami, A.; Kawamura, A.; Iiguni, Y. A high speech quality distance-based howling canceller with adaptive cascade notch filter and silent pilot signal. ICE Trans. Fundam. Electron. Commun. Comput. Sci. 2011, E94-A, 2306–2314. [Google Scholar] [CrossRef]
- Pandey, A.; Mathews, V.J. Howling suppression in hearing aids using least-squares estimation and perceptually motivated gain control. In Proceedings of the 2006 IEEE International Conference on Acoustics Speech and Signal Processing Proceedings, Toulouse, France, 14–19 May 2006; Volume 5. [Google Scholar]
- Mcclellan, J.; Parks, T. A united approach to the design of optimum FIR linear-phase digital filters. IEEE Trans. Circuit Theory 1973, 20, 697–701. [Google Scholar] [CrossRef]
- Zahradnik, P.; Vlcek, M. Fast analytical design algorithms for FIR notch filters. IEEE Trans. Circuits Syst. Regul. Pap. 2004, 51, 608–623. [Google Scholar] [CrossRef]
- Zahradnik, P.; Vlcek, M. An analytical procedure for critical frequency tuning of fir filters. IEEE Trans. Circuits Syst. II Express Briefs 2006, 53, 72–76. [Google Scholar] [CrossRef]
- Huang, X.; Jing, S.; Wang, Z.; Xu, Y.; Zheng, Y. Closed-form fir filter design based on convolution window spectrum interpolation. IEEE Trans. Signal Process. 2016, 64, 1173–1186. [Google Scholar] [CrossRef]
- Bustamante, D.K.; Worrall, T.L.; Williamson, M.J. Measurement and adaptive suppression of acoustic feedback in hearing aids. In Proceedings of the 1989 International Conference on Acoustics, Speech, and Signal Processing (ICASSP-89), Glasgow, Scotland, 23–26 May 1989. [Google Scholar]
- Zhang, F.; Geng, Z.; Yuan, W. The algorithm of interpolating windowed fft for harmonic analysis of electric power system. IEEE Trans. Power Deliv. 2001, 16, 160–164. [Google Scholar] [CrossRef]
- Huang, X.; Xu, J.; Liu, Y. Underdetermined speech blind identification based on spectrum correction and phase coherence criterion. IEEE Access 2019, 7, 21514–21526. [Google Scholar] [CrossRef]
- Haab, L.; Lehser, C.; Bernarding, C.; Corona-Strauss, F.I.; Seidler, H.; Hannemann, R.; Straussa, D.J. Implementation and long-term evaluation of a hearing aid supported tinnitus treatment using notched environmental sounds. IEEE J. Transl. Eng. Health Med. 2019, 7, 1600109. [Google Scholar] [CrossRef]
- Tsuchiya, M.; Sasaoka, N.; Itoh, Y.; Shiogai, K.; Kobayashi, M. Bias free adaptive notch filter based on sscf algorithm with decorrelation parameter. In Proceedings of the 2015 15th International Symposium on Communications and Information Technologies (ISCIT), Nara, Japan, 7–9 October 2015; pp. 21–24. [Google Scholar]
- Spriet, A.; Eneman, K.; Moonen, M.; Wouters, J. Objective measures for real-time evaluation of adaptive feedback cancellation algorithms in hearing aids. In Proceedings of the 2008 16th European Signal Processing Conference, Lausanne, Switzerland, 25–29 August 2008; pp. 1–5. [Google Scholar]
- Kar, A.; Ankitab, A.; Swamy, M.N.S. Automatic tap-length adjustment of adaptive filter for feedback attenuation in hearing aids. Appl. Acoust. 2020, 158, 107043. [Google Scholar] [CrossRef]
- Loetwassana, W.; Punchalard, R.; Lorsawatsiri, A.; Koseeyaporn, J.; Wardkein, P. Adaptive howling suppressor in an audio amplifier system. In Proceedings of the 2007 Asia-Pacific Conference on Communications, Bangkok, Thailand, 18–20 October 2007; pp. 445–448. [Google Scholar]
- Feng, Y.Q.; Tang, G.C.; Liang, R.Y.; Wang, Q.Y. An improved echo cancellation algorithm for hearing aids. In Proceedings of the 2015 International Conference on Electronics, Electrical Engineering and Information Science (EEEIS2015), Guangzhou, China, 7–9 August 2016. [Google Scholar]
- Carney, R. Design of a digital notch filter with tracking requirements. IEEE Trans. Space Electron. Telem. 1963, SET-9, 109–114. [Google Scholar] [CrossRef]
- Leotwassana, W.; Punchalard, R.; Silaphan, W. Adaptive howling canceller using adaptive iir notch filter: Simulation and implementation. In Proceedings of the International Conference on Neural Networks & Signal Processing, Nanjing, China, 14–17 December 2003. [Google Scholar]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| (Hz) | RSNR (dB) |
|---|---|
| 1290 | 21.28 |
| 1590 | 21.92 |
| 1890 | 21.97 |
| 2190 | 22.11 |
| 2490 | 22.18 |
| 2790 | 22.12 |
| 3090 | 22.04 |
| 3390 | 22.01 |
| Order N | RSNR (dB) |
|---|---|
| 32 | 21.92 |
| 64 | 21.83 |
| 128 | 21.75 |
| 256 | 22.43 |
| 512 | 22.81 |
| 1024 | 20.97 |
| Length | RSNR (dB) |
|---|---|
| 31 | 21.92 |
| 48 | 21.92 |
| 63 | 21.92 |
| 96 | 21.92 |
| 127 | 21.92 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, Y.; Huang, X.; Zheng, Y.; Gao, Z.; Kou, L.; Wan, J. Howling Detection and Suppression Based on Segmented Notch Filtering. Sensors 2021, 21, 8062. https://doi.org/10.3390/s21238062
Li Y, Huang X, Zheng Y, Gao Z, Kou L, Wan J. Howling Detection and Suppression Based on Segmented Notch Filtering. Sensors. 2021; 21(23):8062. https://doi.org/10.3390/s21238062
Chicago/Turabian StyleLi, Yanping, Xiangdong Huang, Yi Zheng, Zhongke Gao, Lei Kou, and Junhe Wan. 2021. "Howling Detection and Suppression Based on Segmented Notch Filtering" Sensors 21, no. 23: 8062. https://doi.org/10.3390/s21238062
APA StyleLi, Y., Huang, X., Zheng, Y., Gao, Z., Kou, L., & Wan, J. (2021). Howling Detection and Suppression Based on Segmented Notch Filtering. Sensors, 21(23), 8062. https://doi.org/10.3390/s21238062