
Characterization and Benchmark of a Novel Capacitive and Fluidic Inclination Sensor



Abstract
:1. Introduction
2. Materials and Methods
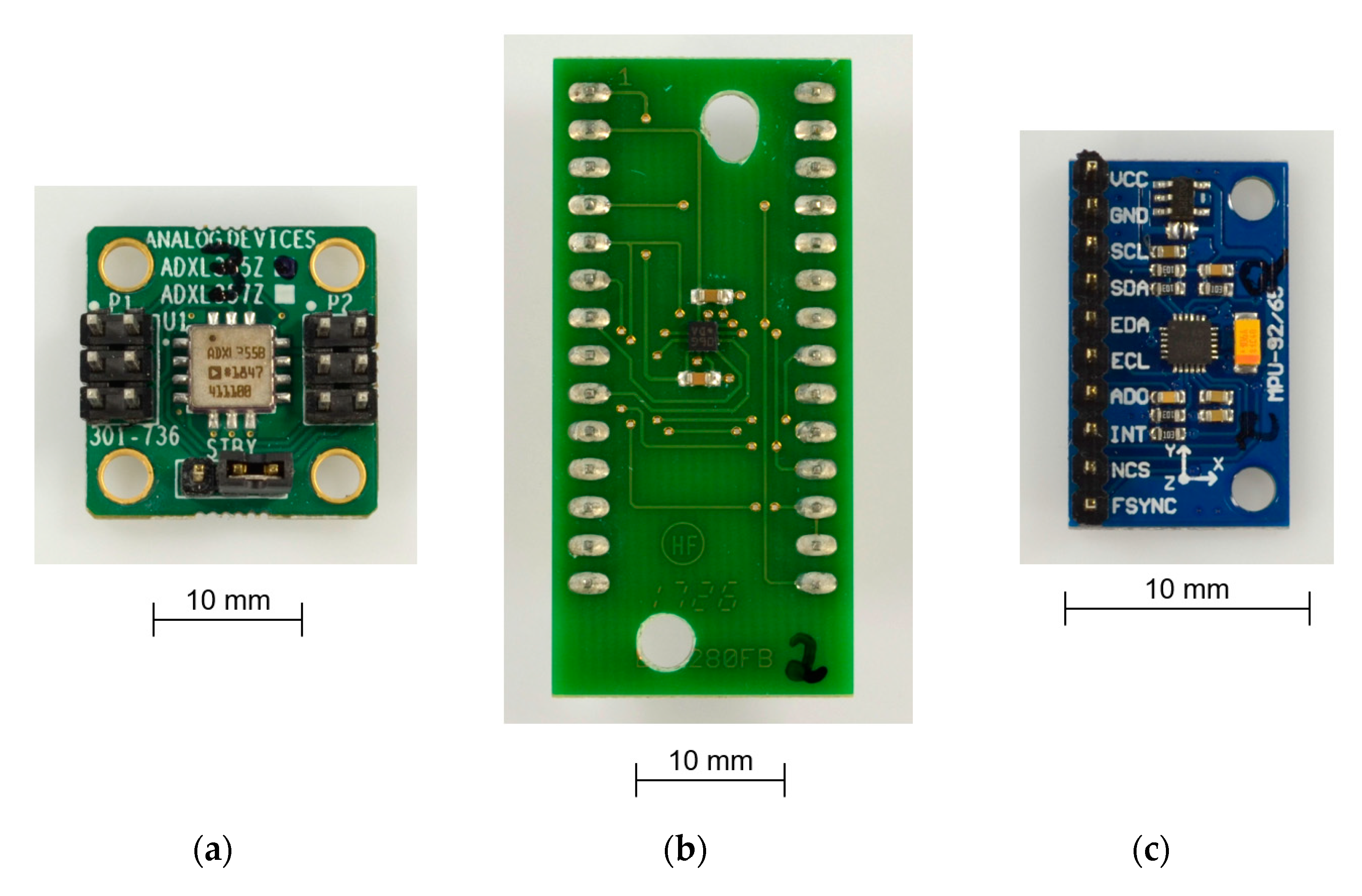
2.1. Benchmark Sensors
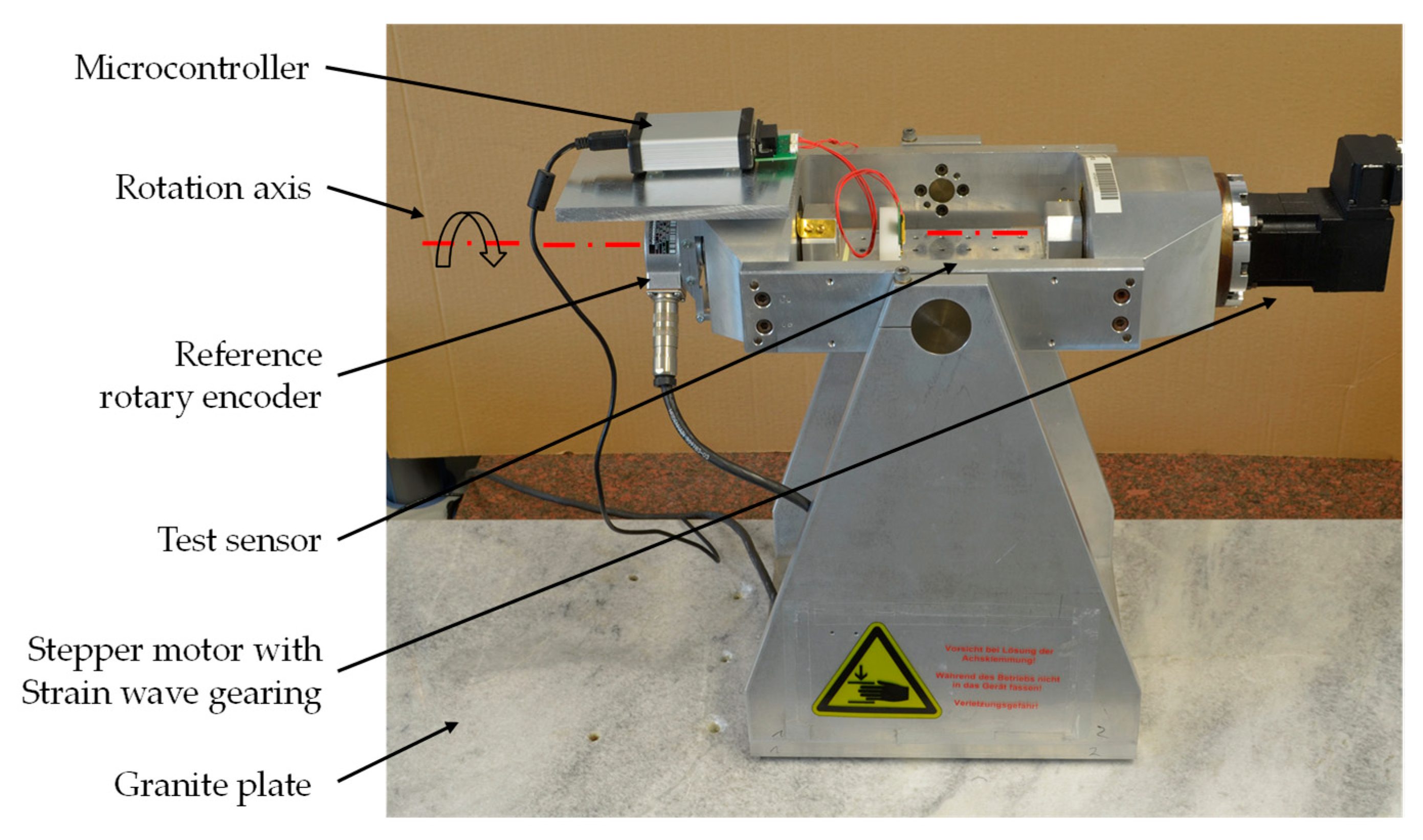
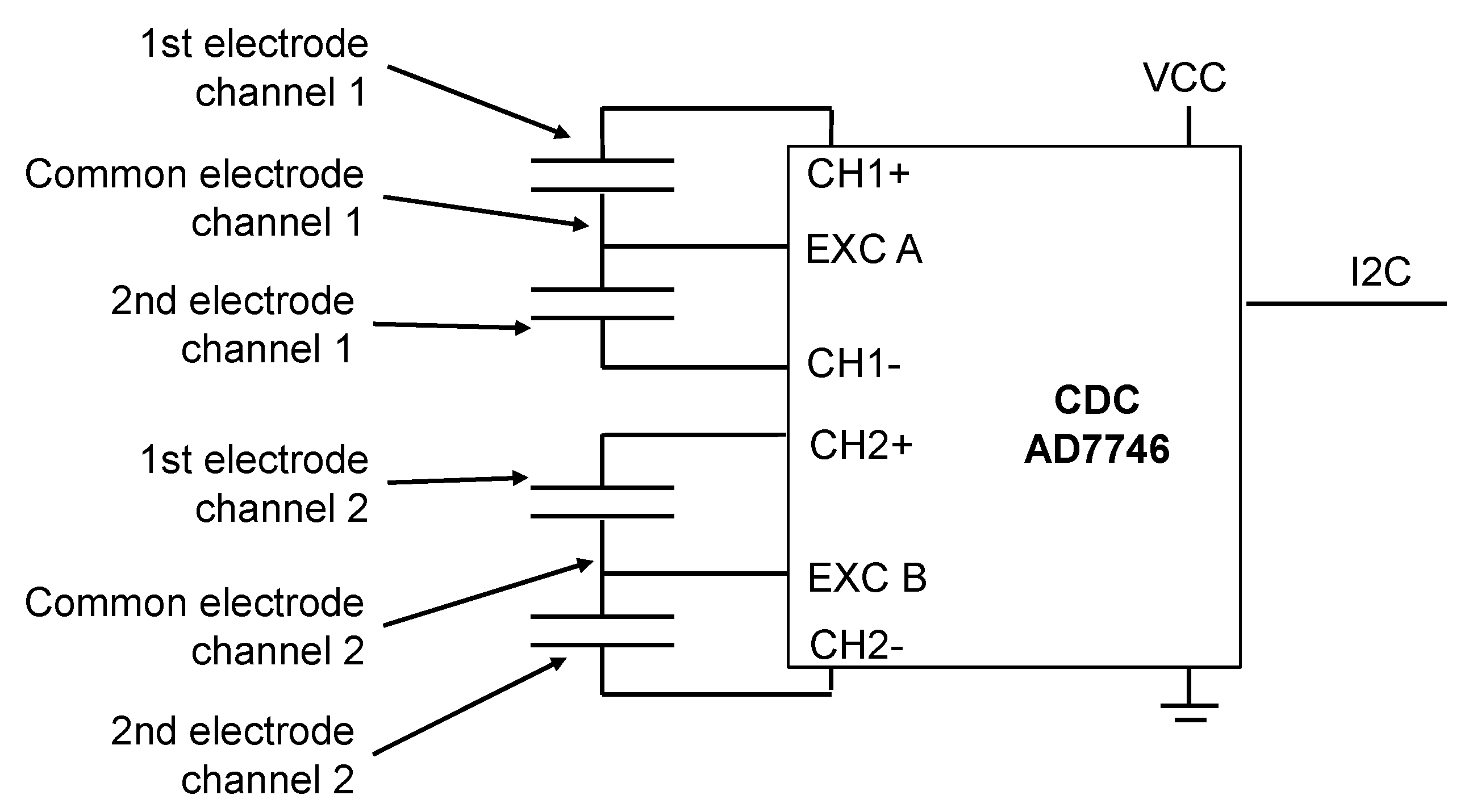
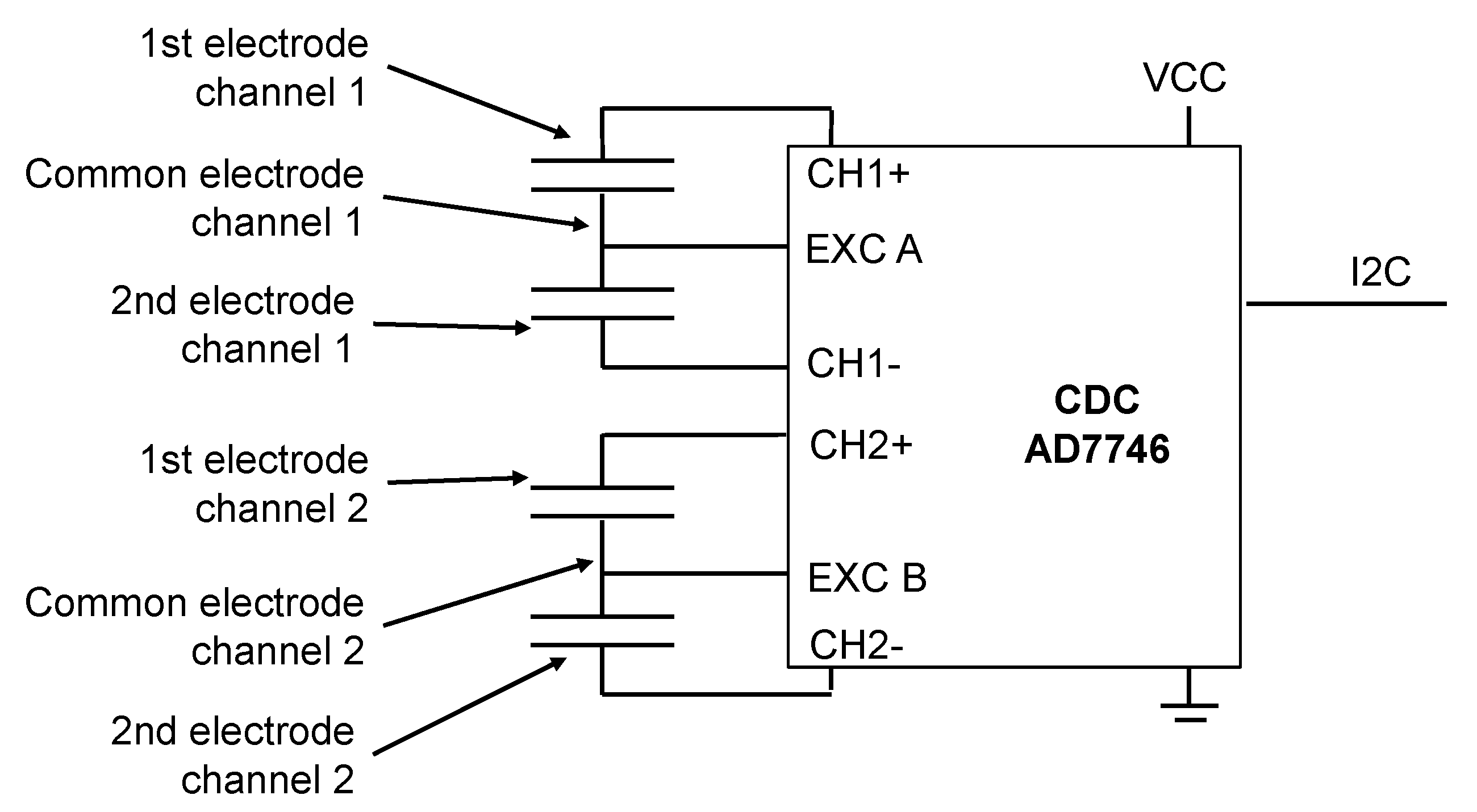
2.2. Measurement Equipment
2.3. Calibration
2.3.1. Acceleration Sensors used as Inclination Sensors
2.3.2. Fluidic Inclination Sensors
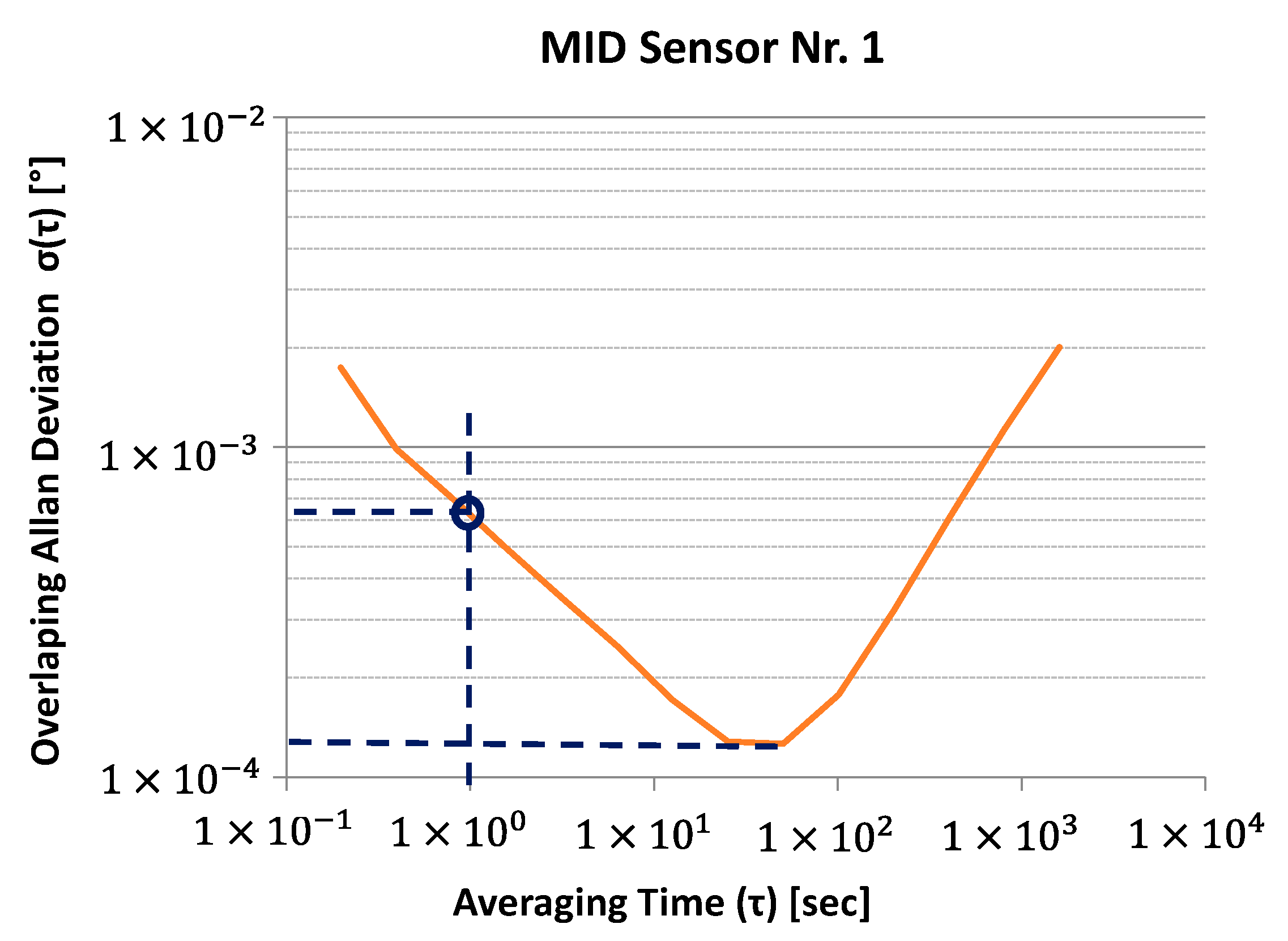
2.4. Allan Deviation
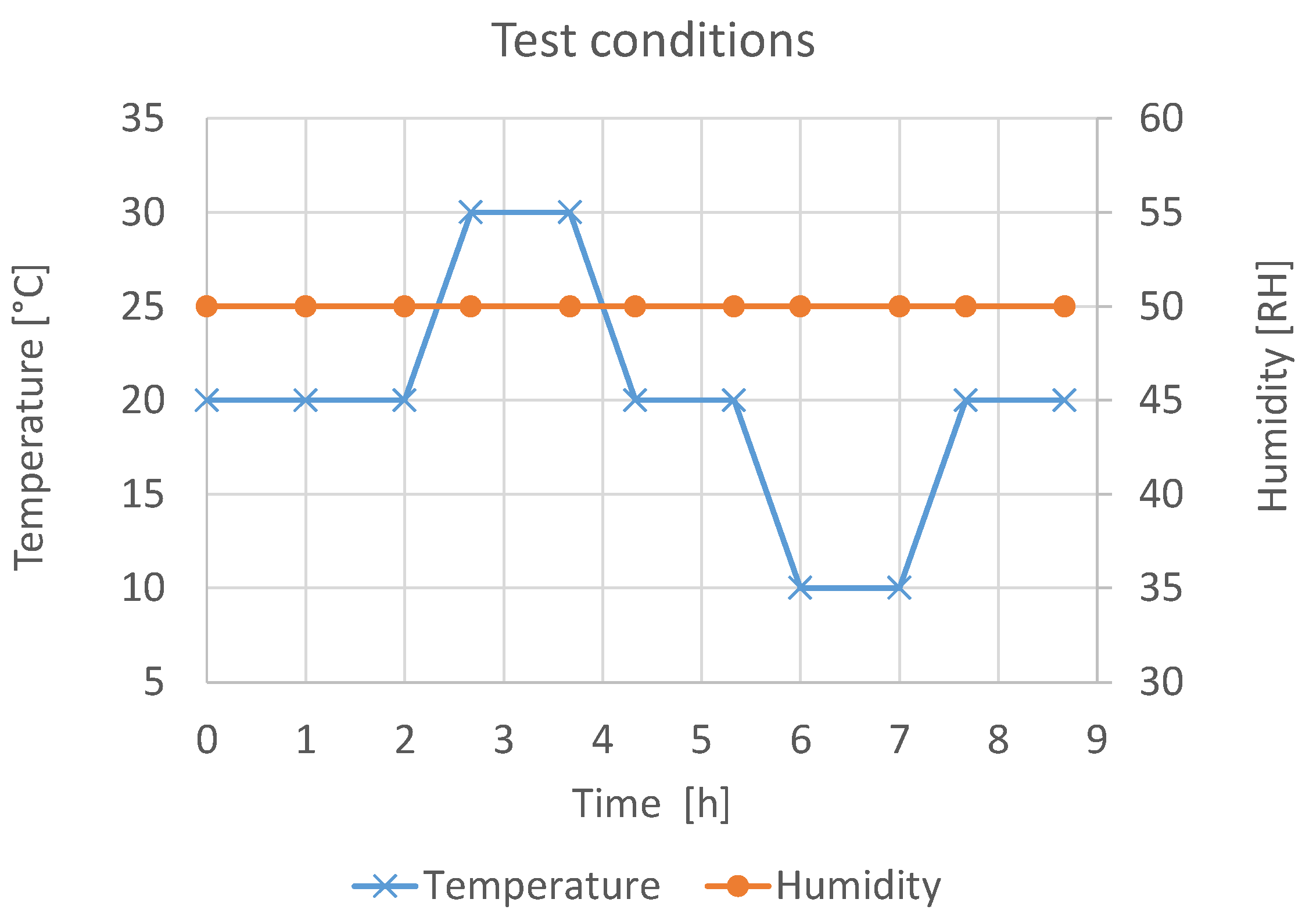
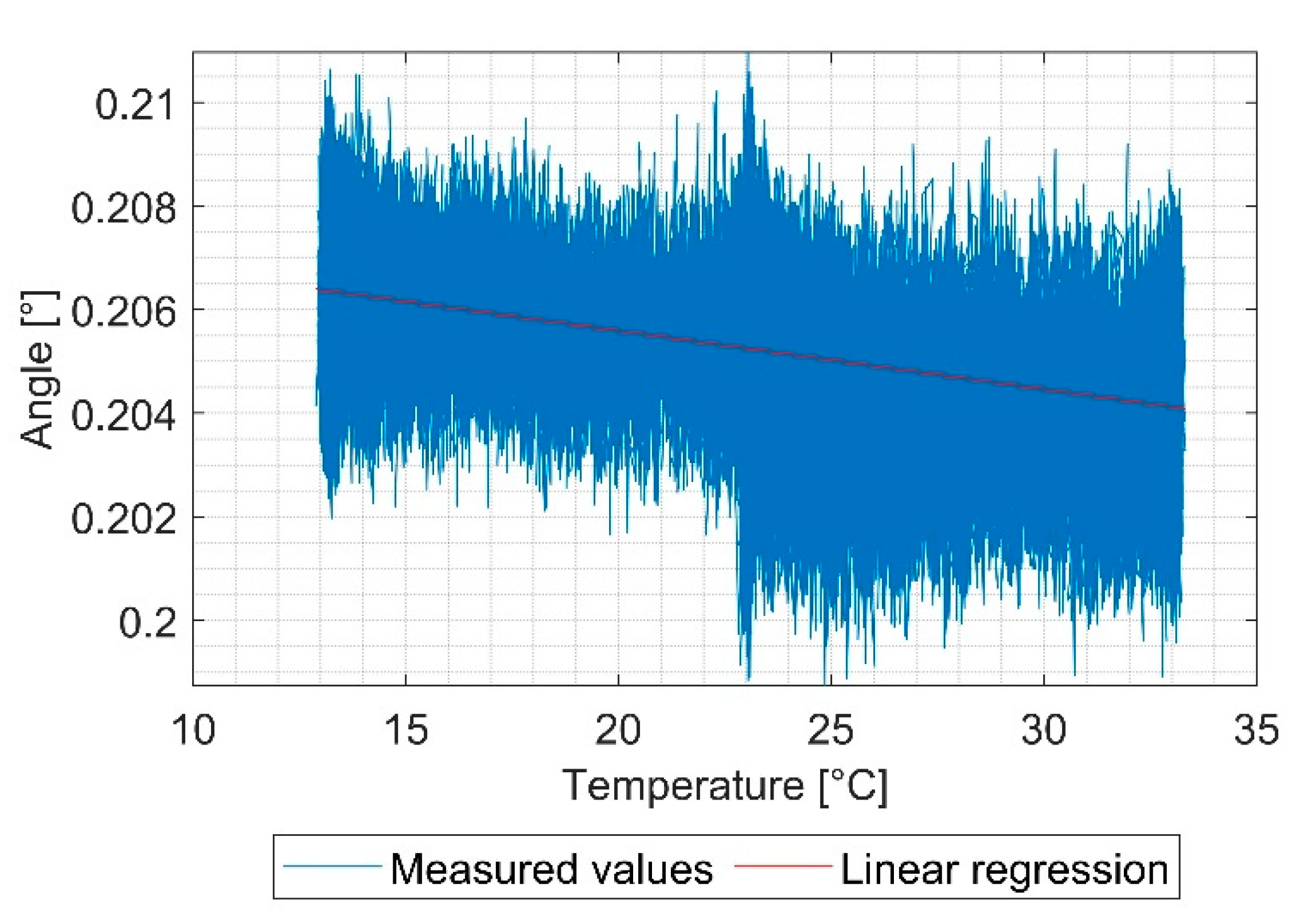
2.5. Temperature Stability Offset
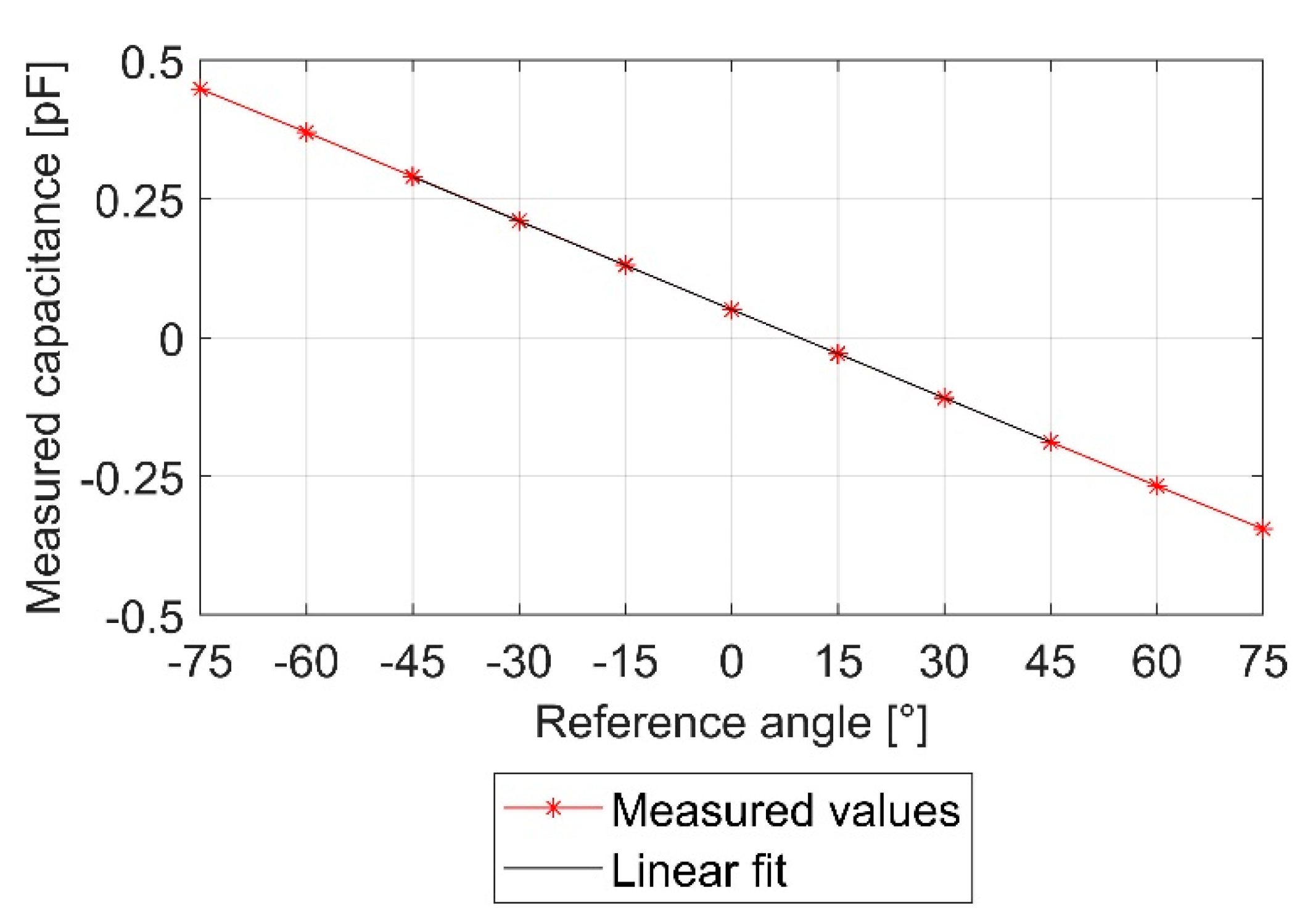
2.6. Characteristic Curve
2.7. T-Test
3. Results
3.1. Fluidic Capacitive Sensors
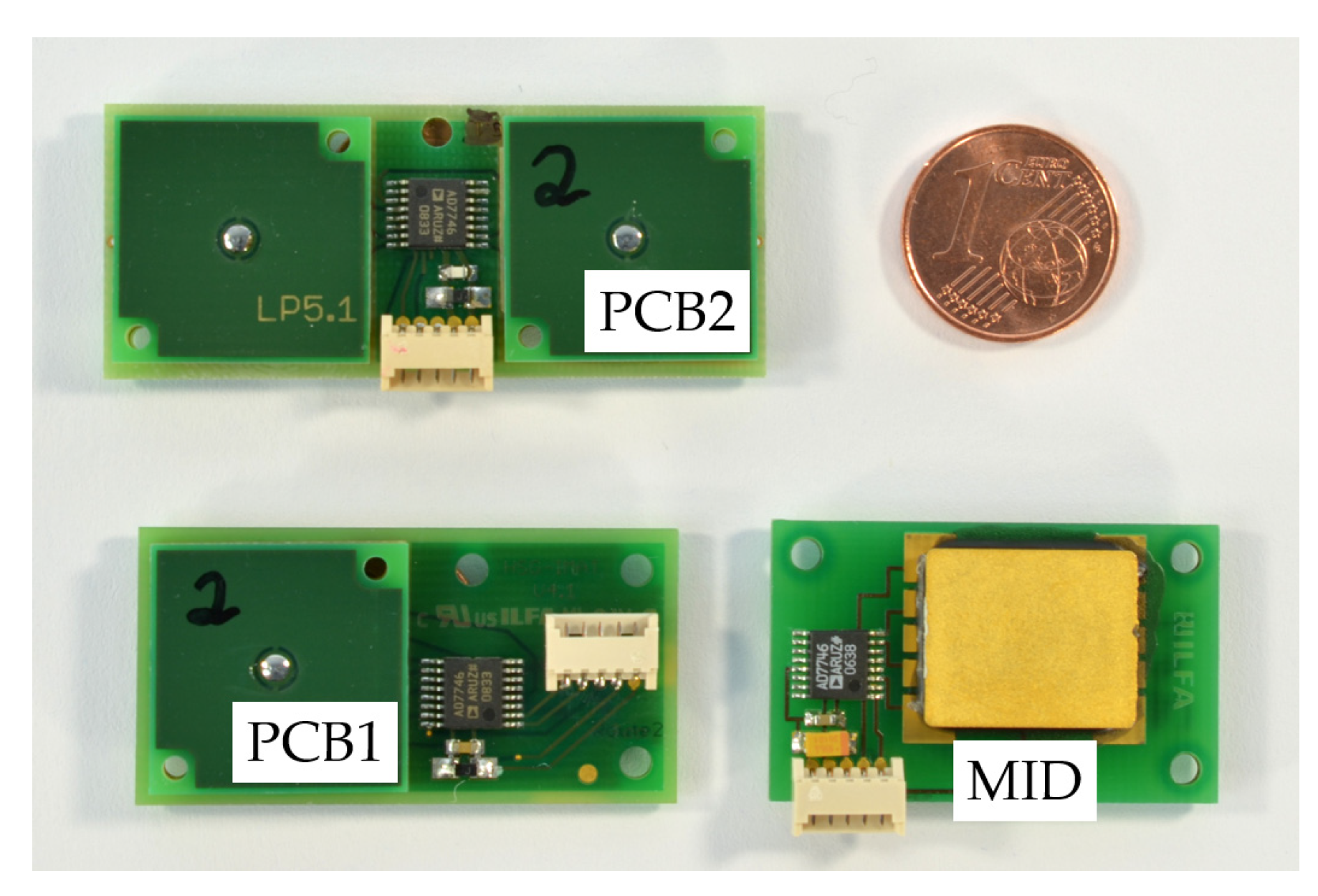
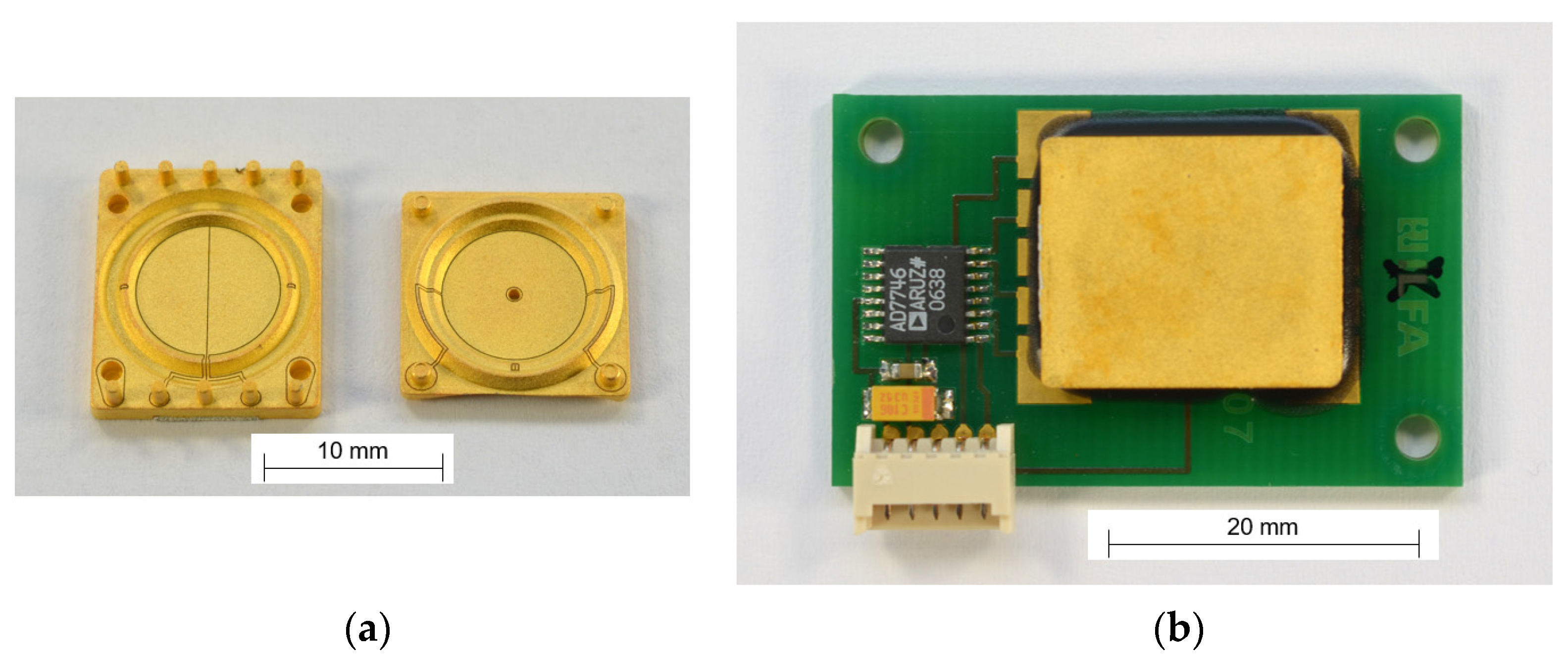
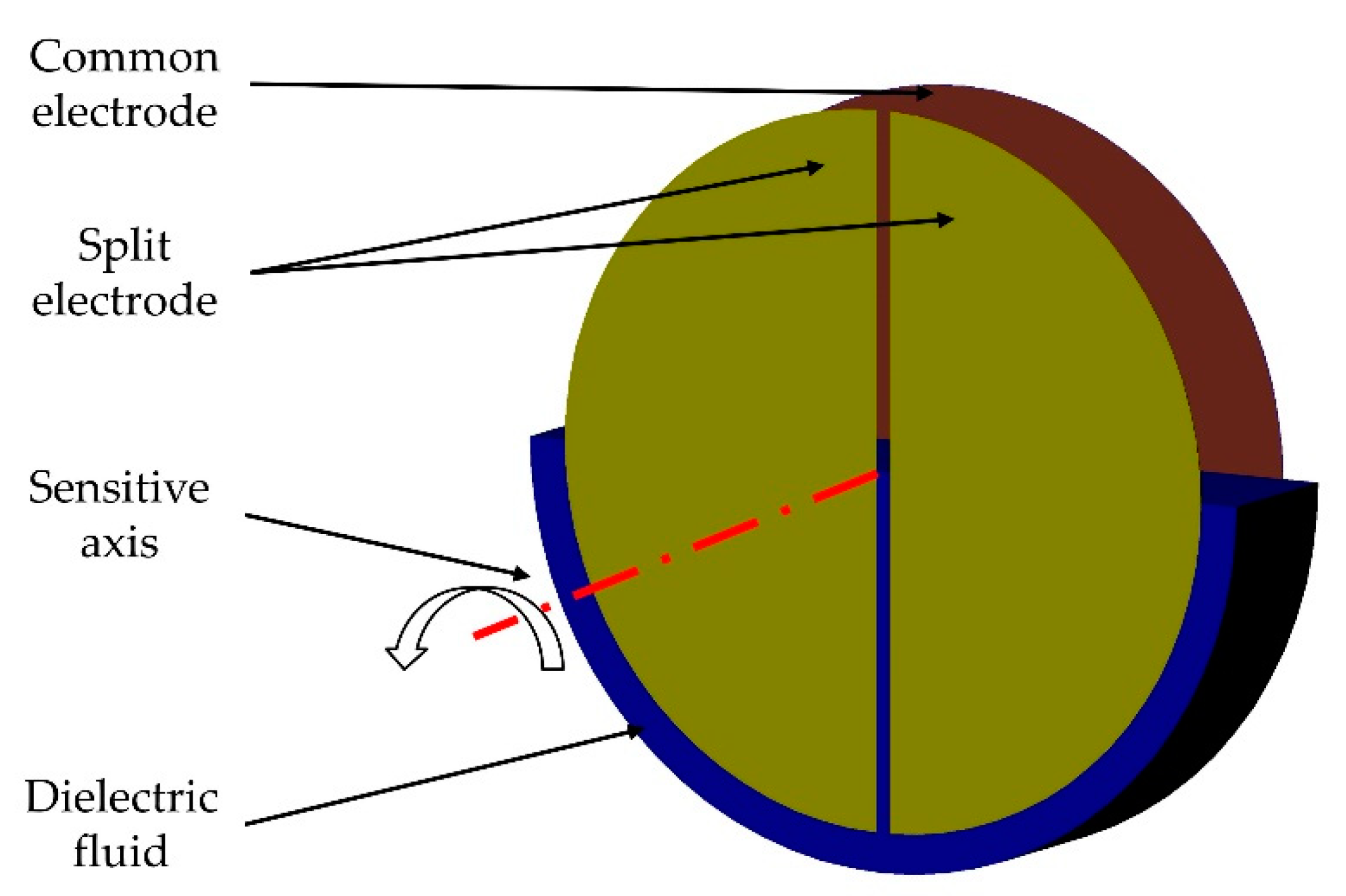
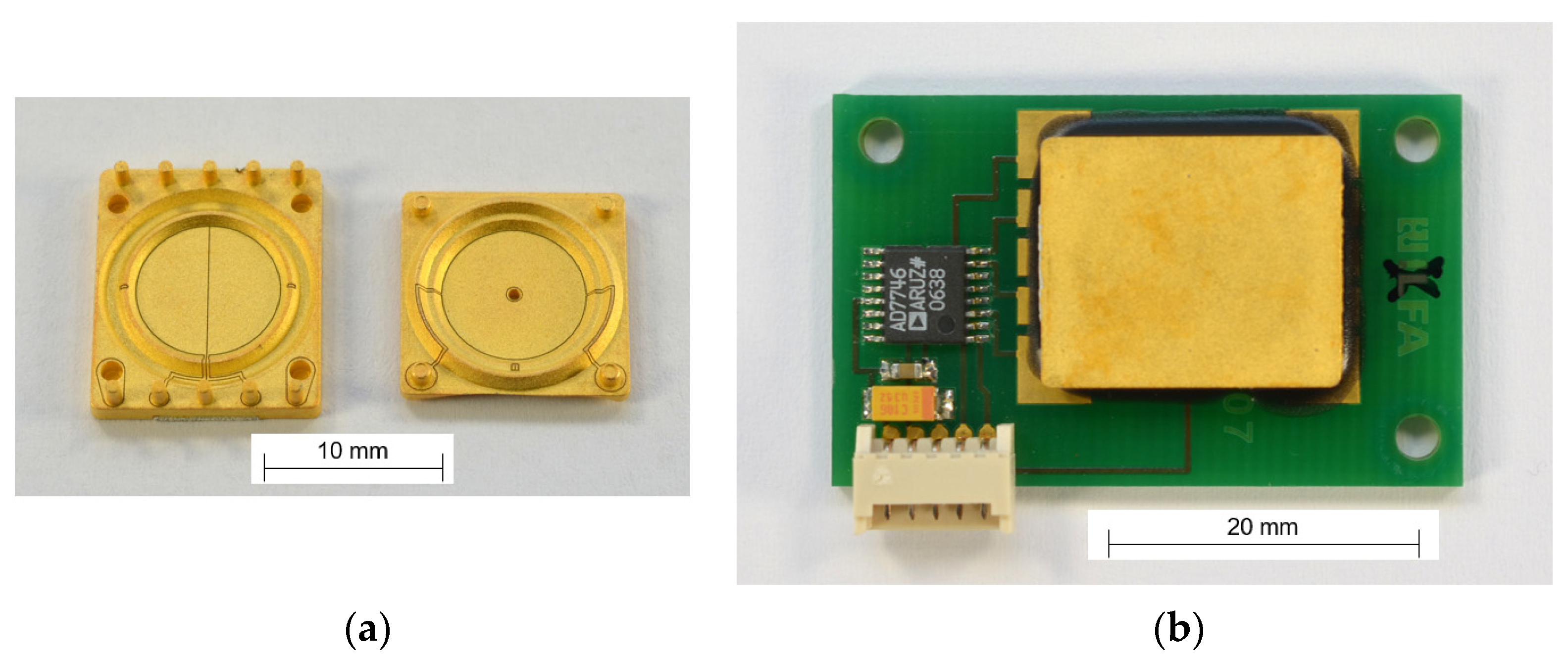
3.1.1. MID Sensor
- (1)
- Injection molding of the substrate;
- (2)
- Full-surface chemical metallization of the substrate with copper;
- (3)
- Subtractive laser structuring of the metallization;
- (4)
- Reinforcing of the metallization with nickel and gold for diffusion and corrosion protection;
- (5)
- Adhesive bonding of the two halves of the sensor element to form the cavity;
- (6)
- Filling the cavity halfway with the dielectric fluid;
- (7)
- Closing of the filling hole by soldering;
- (8)
- Placing and soldering of the electronic components on the PCB;
- (9)
- Electrical connection of the sensor element on the PCB with isotropic conductive adhesive (ICA);
- (10)
- Application of an epoxy underfiller for mechanical stability.
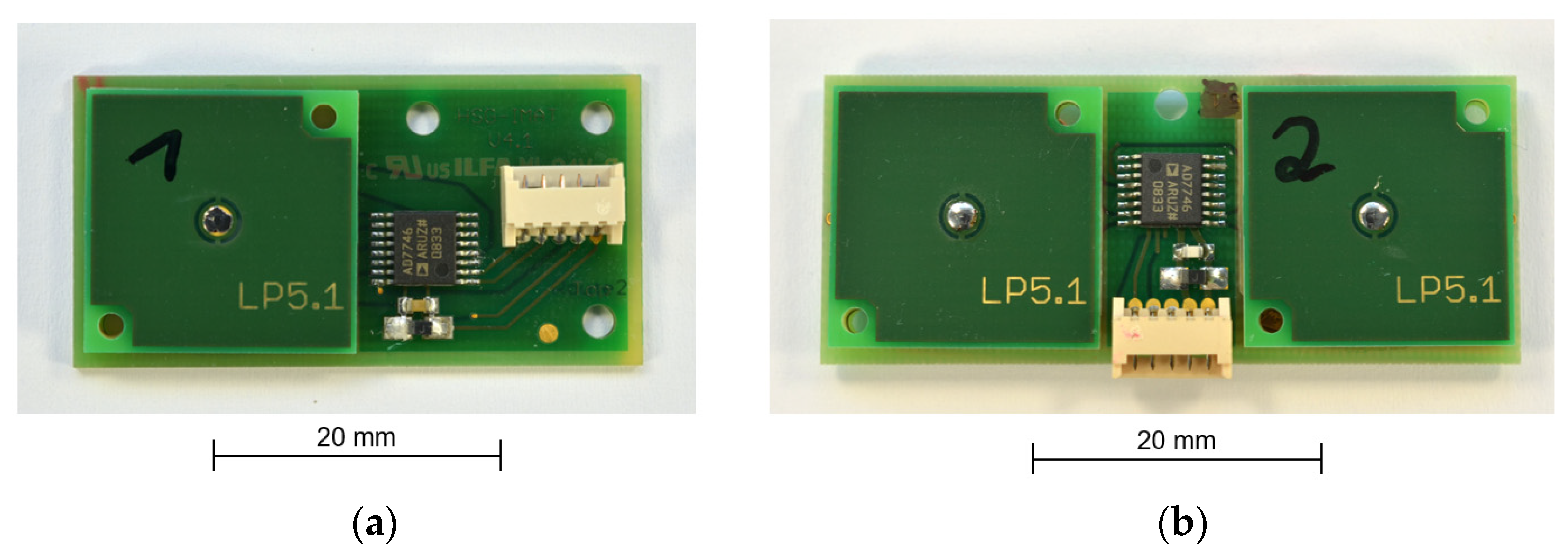
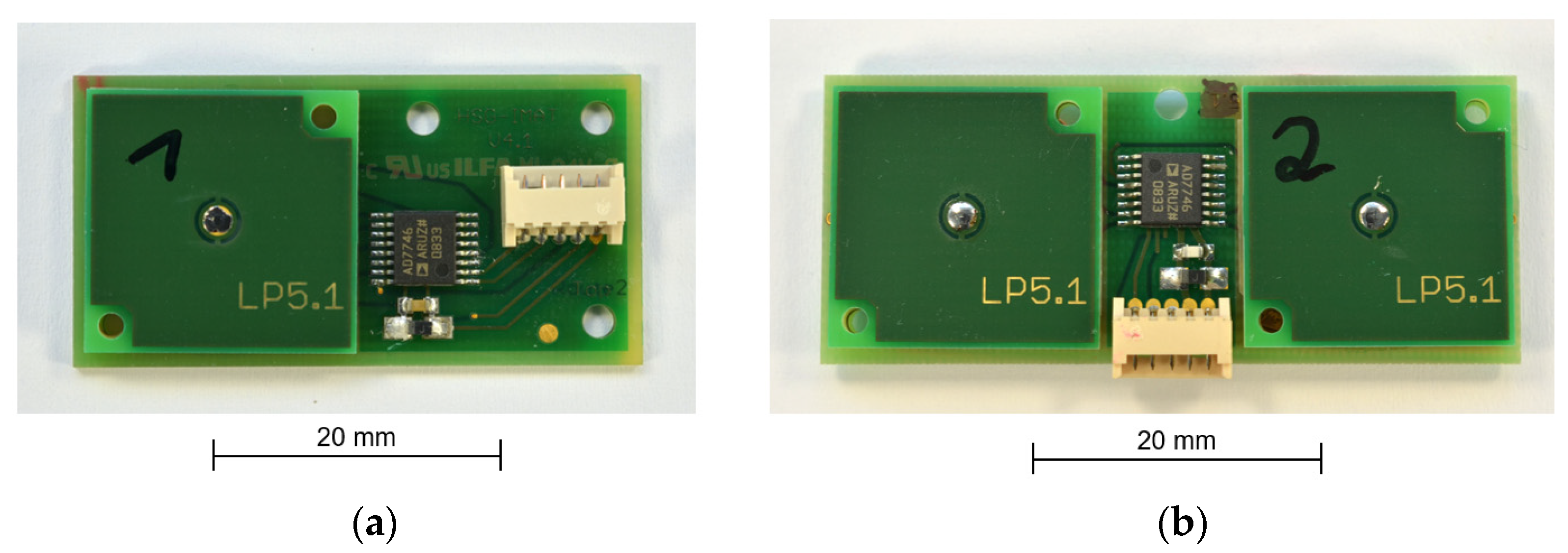
3.1.2. PCB Sensor
- (1)
- Dispensing of solder paste on the bottom and middle PCBs (Figure 17);
- (2)
- Stacking of the middle and the top PCB on the bottom PCB;
- (3)
- Placement of electronic components on the PCB;
- (4)
- Reflow soldering;
- (5)
- Filling the cavity halfway with the dielectric fluid;
- (6)
- Closing of the filling hole by soldering;
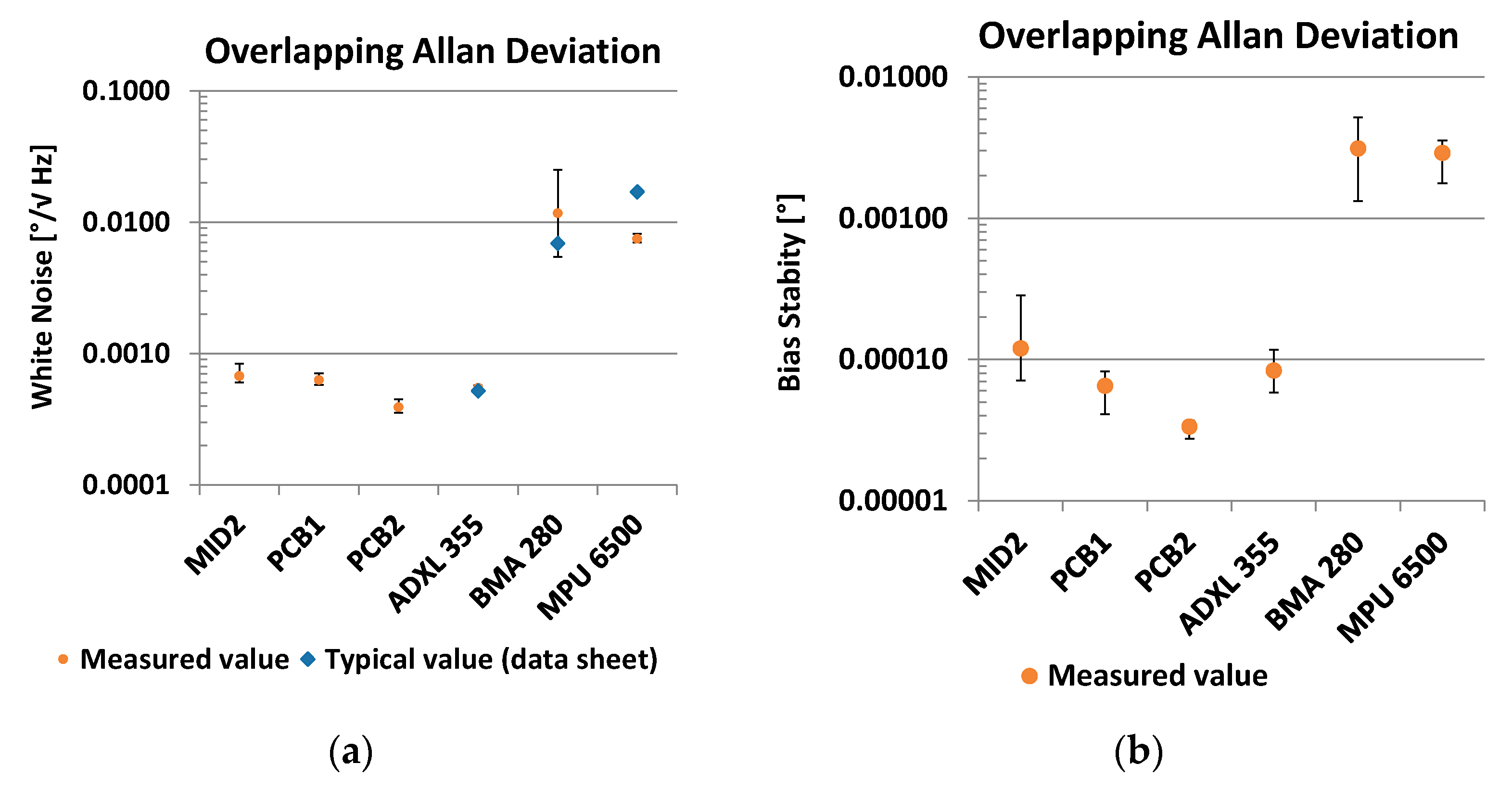
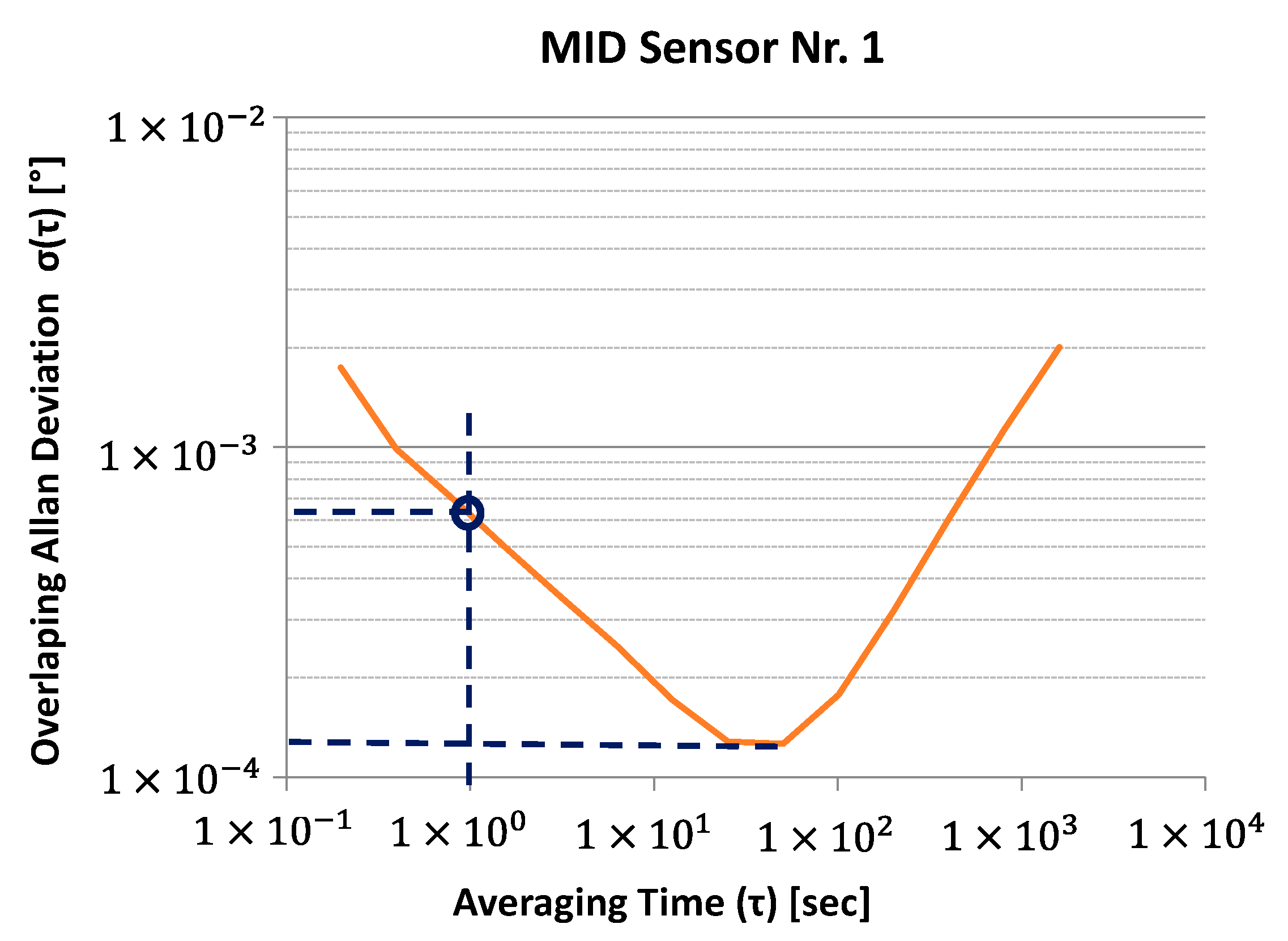
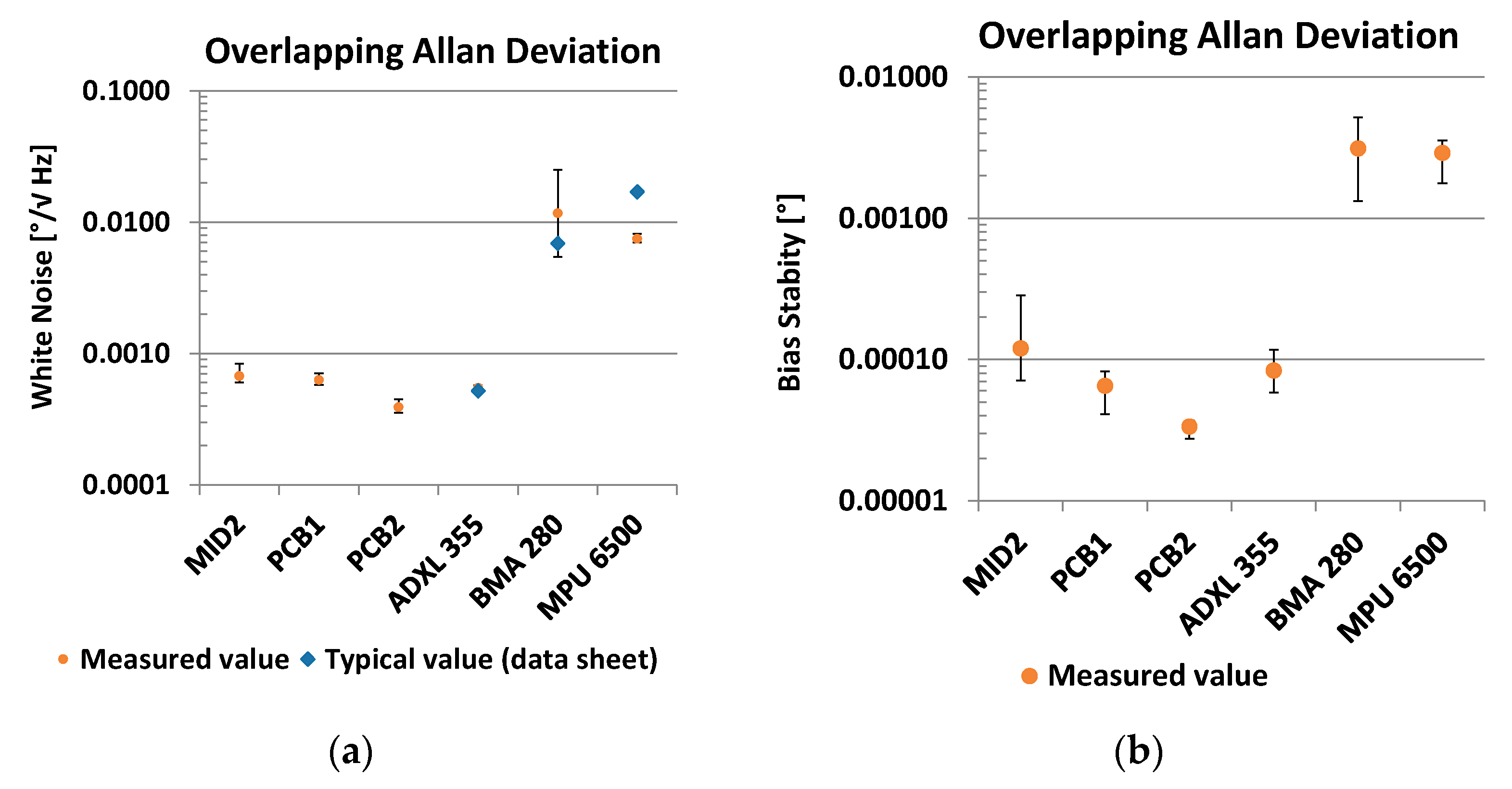
3.2. Allan Deviation
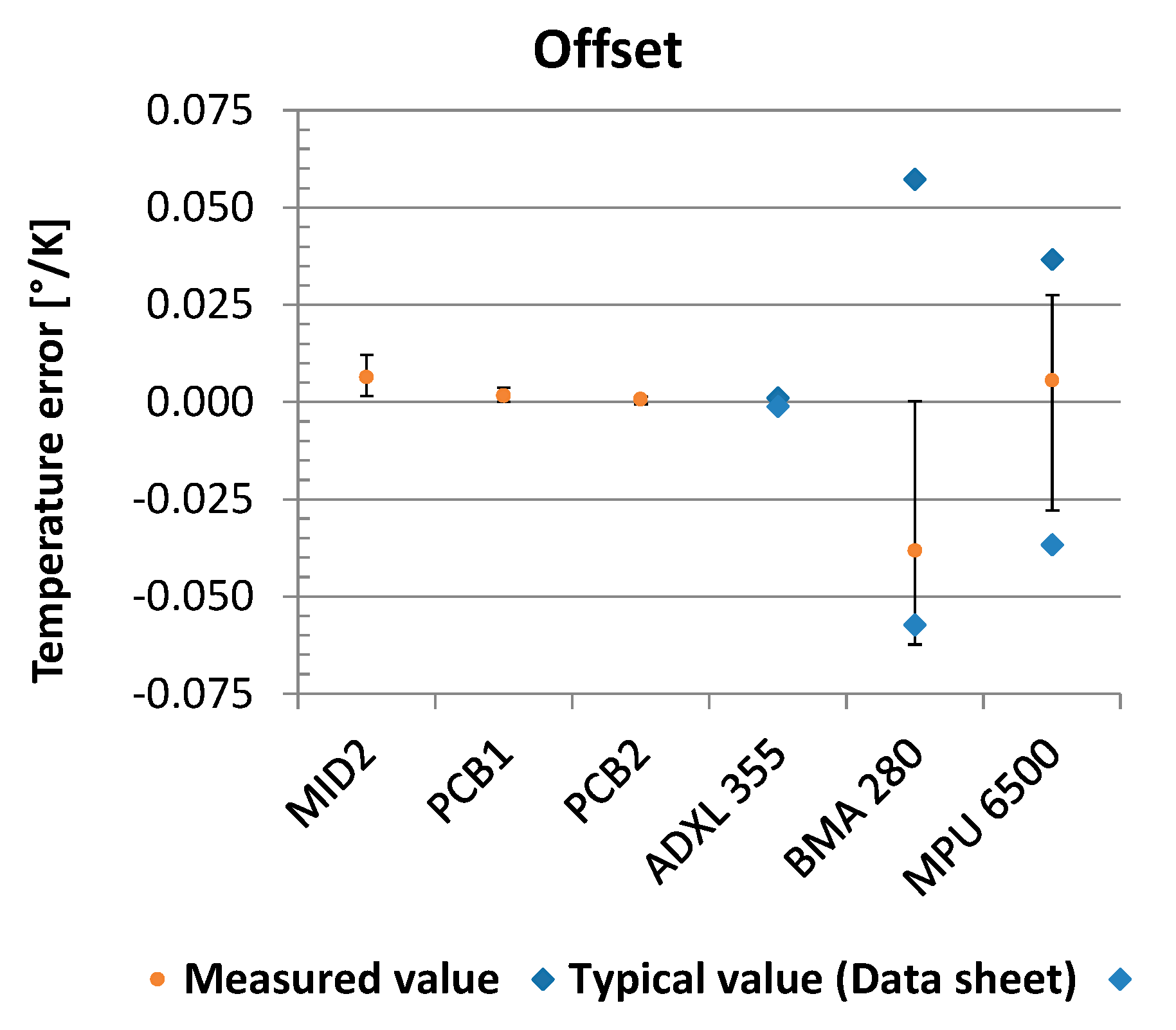
3.3. Temperature Stability
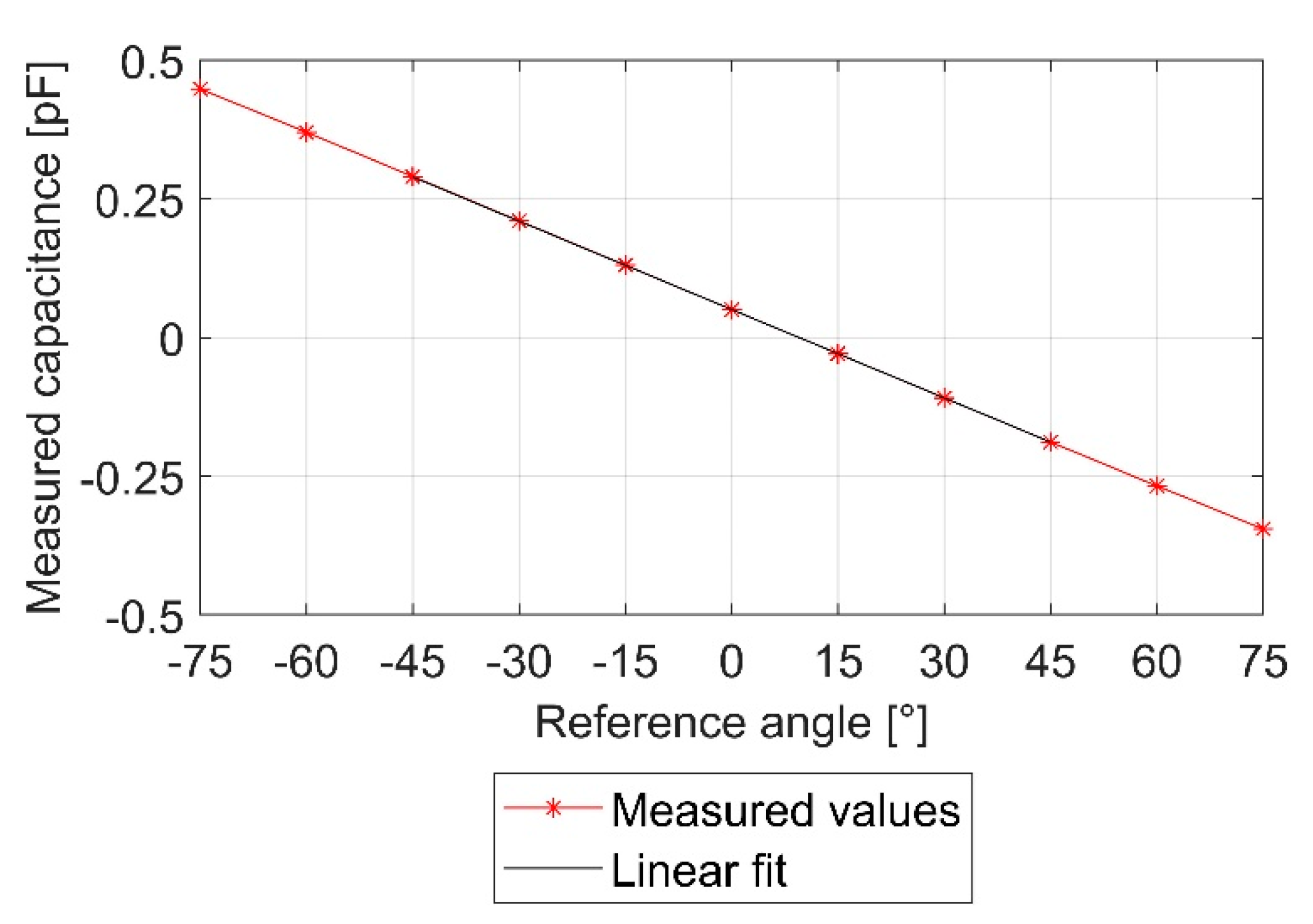
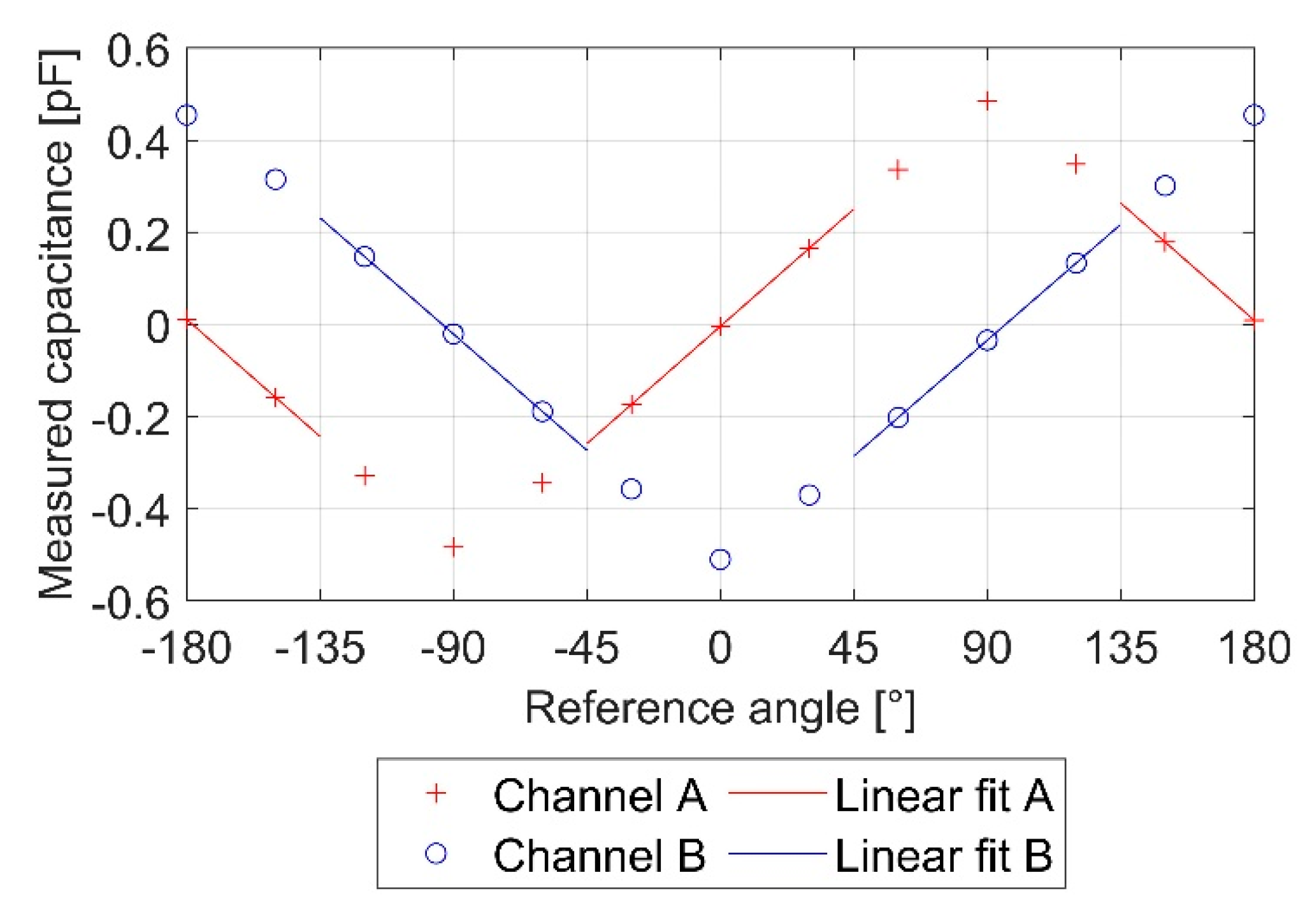
3.4. Characteristic Curve
4. Discussion
5. Conclusions
Supplementary Materials
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Fraden, J. Handbook of Modern Sensors, 5th ed.; Springer: Cham, Switzerland, 2016. [Google Scholar]
- Hering, E.; Schönfelder, G. (Eds.) Geometrische Größen. In Sensoren in Wissenschaft und Technik: Funktionsweise und Einsatzgebiete; Springer: Wiesbaden, Germany, 2018; pp. 127–327. ISBN 978-3-658-12562-2. [Google Scholar]
- Schwenck, A.; Fries, A.; Fritz, K.-P.; Kück, H.; Mayer, V.; Pojtinger, A.; Remer, U. Fluidic Capacitive Inclination Sensor with High Resolution. In Proceedings of the MikroSystemTechnik-Kongress, Berlin, Germany, 12–14 October 2009; VDE-Verlag: Berlin, Germany, 2009. [Google Scholar]
- Benz, D. Untersuchungen Zum Aufbau von Neigungswinkelsensoren Aus Kunststoffbasierten Bauteilen; Dr. Hut: München, Germany, 2009; ISBN 978-3-89963-936-0. [Google Scholar]
- Yole Développement Status of the MEMS Industry 2021, Market and Technology Report. Available online: https://www.i-micronews.com/products/status-of-the-mems-industry-2021 (accessed on 30 July 2021).
- Yole Développement High-End Inertial Sensors for Defense, Aerospace & Industrial Applications—Market and Technology Report 2020. Available online: https://www.i-micronews.com/products/high-end-inertial-sensors-for-defense-aerospace-and-industrial-applications-2020 (accessed on 29 July 2021).
- Ding, H.; Ma, Y.; Guan, Y.; Ju, B.-F.; Xie, J. Duplex Mode Tilt Measurements Based on a MEMS Biaxial Resonant Accelerometer. Sens. Actuators Phys. 2019, 296, 222–234. [Google Scholar] [CrossRef]
- Todorokihara, M.; Sato, K.; Kobayashi, Y. A Resonant Frequency Shift Quartz Accelerometer with 1st Order Frequency ΔΣ Modulators for a High Performance MEMS IMU. In Proceedings of the 2018 DGON Inertial Sensors and Systems (ISS), Braunschweig, Germany, 11–12 September 2018; pp. 1–15. [Google Scholar]
- Seiko Epson Corporation Accelerometer Product Line-Up. Available online: https://global.epson.com/products_and_drivers/sensing_system/acc/ (accessed on 19 November 2021).
- Loret, T.; Hardy, G.; Vallée, C.; Demutrecy, V.; Kerrien, T.; Cochain, S.; Boutoille, D.; Taïbi, R.; Blondeau, R. Navigation Grade Accelerometer with Quartz Vibrating Beam. In Proceedings of the 2014 DGON Inertial Sensors and Systems (ISS), Karlsruhe, Germany, 16–17 September 2014; pp. 1–14. [Google Scholar]
- Honeywell Accelerometers. Available online: https://aerospace.honeywell.com/us/en/learn/products/sensors/accelerometers-high-performance-accelerometers (accessed on 19 November 2021).
- Li, B.; Zhang, H.; Zhong, J.; Chang, H. A Mode Localization Based Resonant MEMS Tilt Sensor with a Linear Measurement Range of 360°. In Proceedings of the 2016 IEEE 29th International Conference on Micro Electro Mechanical Systems (MEMS), Shanghai, China, 24–28 January 2016; pp. 938–941. [Google Scholar]
- Everhart, C.L.M.; Kaplan, K.E.; Winterkorn, M.M.; Kwon, H.; Provine, J.; Asheghi, M.; Goodson, K.E.; Prinz, F.B.; Kenny, T.W. High Stability Thermal Accelerometer Based on Ultrathin Platinum ALD Nanostructures. In Proceedings of the 2018 IEEE Micro Electro Mechanical Systems (MEMS), Belfast Waterfront, Belfast, Ireland, 21–24 January 2018; pp. 976–979. [Google Scholar]
- Memsic Thermal Accelerometer. Available online: http://www.memsic.com/en/product/list.aspx?lcid=30 (accessed on 19 November 2021).
- Ozioko, O.; Nassar, H.; Dahiya, R. 3D Printed Interdigitated Capacitor Based Tilt Sensor. IEEE Sens. J. 2021, 21, 26252–26260. [Google Scholar] [CrossRef]
- Dang Dinh, T.; Bui, T.T.; Quoc, T.V.; Quoc, T.P.; Aoyagi, M.; Ngoc, M.B.; Duc, T.C. Two-Axis Tilt Angle Detection Based on Dielectric Liquid Capacitive Sensor. In Proceedings of the 2016 IEEE SENSORS, Orlando, FL, USA, 30 October–2 November 2016; pp. 1–3. [Google Scholar]
- Hou, B.; Zhou, B.; Zhang, X.; Li, X.; Yi, L.; Wei, Q.; Zhang, R. A Full 360° Measurement Range Liquid Capacitive Inclinometer with a Triple- Eccentric-Ring Sensing Element and Differential Detection Scheme. IEEE Trans. Ind. Electron. 2020, 67, 4216–4225. [Google Scholar] [CrossRef]
- Salvador, B.; Luque, A.; Quero, J.M. Microfluidic Capacitive Tilt Sensor Using PCB-MEMS. In Proceedings of the 2015 IEEE International Conference on Industrial Technology (ICIT), Seville, Spain, 17–19 March 2015; pp. 3356–3360. [Google Scholar]
- Seika Summary of Standard SEIKA Products. Available online: https://www.seika.de/english/index.htm (accessed on 19 September 2021).
- Jewell Instruments Model 801 “Tuff Tilt” Tiltmeter Series. Available online: https://jewellinstruments.com/products/geo/high-precision/800-series/801-tuff-tilt/#tab-downloads (accessed on 27 July 2021).
- Spectron Glass & Electronics Inc. Inclinometers–Clinometers. Available online: http://spectronsensors.com/inclinometers.php (accessed on 19 September 2021).
- The Fredericks Company Electrolytic and MEMS Inclinometer Sensors. Available online: https://frederickscompany.com/product_category/inclinometers/ (accessed on 19 September 2021).
- Leica Geosystems Data Sheed Precision Level NIVEL230 for Leica Laser Tracker. Available online: https://w3.leica-geosystems.com/downloads123/m1/metrology/nivel230/brochures-datasheet/NIVEL230%20datasheet_de.pdf (accessed on 13 August 2021).
- Völklein, F.; Zetterer, T. (Eds.) Grundstrukturen und anwendungen. In Praxiswissen Mikrosystemtechnik: Grundlagen—Technologien—Anwendungen; Vieweg+Teubner: Wiesbaden, Germany, 2006; pp. 143–316. ISBN 978-3-8348-9105-1. [Google Scholar]
- Marjoux, D.; Ullah, P.; Frantz-Rodriguez, N.; Morgado-Orsini, P.-F.; Soursou, M.; Brisson, R.; Lenoir, Y.; Delhaye, F. Silicon MEMS by Safran—Navigation grade accelerometer ready for mass production. In Proceedings of the 2020 DGON Inertial Sensors and Systems (ISS), Braunschweig, Germany, 15 September 2020; pp. 1–18. [Google Scholar]
- Haub, M.; Bogner, M.; Guenther, T.; Zimmermann, A.; Sandmaier, H. Development and Proof of Concept of a Miniaturized MEMS Quantum Tunneling Accelerometer Based on PtC Tips by Focused Ion Beam 3D Nano-Patterning. Sensors 2021, 21, 3795. [Google Scholar] [CrossRef] [PubMed]
- Franke, J. 3D-MID: Three-Dimensional Molded Interconnect Devices; Hanser Publications: Munich, Germany, 2014; ISBN 978-1-56990-551-7. [Google Scholar]
- Häußler, F.; Shen, S.; Petillon, S.; Weser, S.; Haybat, M.; Eberhardt, W.; Zimmermann, A.; Franke, J. Evaluating thermoset resin substrates for 3D mechatronic integrated devices and packaging. Int. Symp. Microelectron. 2020, 2020, 000140–000145. [Google Scholar] [CrossRef]
- Kern, F.; Ninz, P.; Gadow, R.; Eberhardt, W.; Petillon, S.; Zimmermann, A. Selektive laserinduzierte metallisierung von 3D-schaltungsträgern aus aluminiumoxid. Keram. Z. 2020, 72, 42–47. [Google Scholar] [CrossRef]
- Brunet, A.; Gengenbach, U.; Müller, T.; Scholz, S.; Dickerhof, M. Moulded interconnect devices. In Micro-Technologies and Their Applications: A Theoretical and Practical Guide; Fassi, I., Shipley, D., Eds.; Springer International Publishing: Cham, Switzerland, 2017; pp. 175–196. ISBN 978-3-319-39651-4. [Google Scholar]
- Keßler, U.; Pütz, J.; Eberhardt, W.; Kück, H.; Zimmermann, A. 3D-Mikromontage: Anwendungsbeispiel mehrachsige Magnetfeldsensoren. PLUS 2016, 18, 1981–1984. [Google Scholar]
- Moser, D.; Krause, J. 3D-MID—Multifunctional packages for sensors in automotive applications. In Proceedings of the Advanced Microsystems for Automotive Applications, Berlin, Germany, 25–27 April 2006; Valldorf, J., Gessner, W., Eds.; Springer: Berlin/Heidelberg, Germany, 2006; pp. 369–375. [Google Scholar]
- Schwenck, A.; Grözinger, T.; Günther, T.; Schumacher, A.; Schuhmacher, D.; Werum, K.; Zimmermann, A. Characterization of a PCB based pressure sensor and its joining methods for the metal membrane. Sensors 2021, 21, 5557. [Google Scholar] [CrossRef] [PubMed]
- Analog Devices Datasheet ADXL354/355, Rev. B. Available online: https://www.analog.com/media/en/technical-documentation/data-sheets/ADXL354_355.pdf (accessed on 27 July 2021).
- Bosch Sensortec Datasheett BMA280, Rev. 1.10. Available online: https://www.bosch-sensortec.com/media/boschsensortec/downloads/datasheets/bst-bma280-ds000.pdf (accessed on 27 July 2021).
- TDK InvenSense MPU-6500 Product Specification, Revision 1.3, Document Number: PS-MPU-6500A-01, Rev. Date: 05/15/202. Available online: http://invensense.tdk.com/wp-content/uploads/2020/06/PS-MPU-6500A-01-v1.3.pdf (accessed on 27 July 2021).
- Safran Colibrys Preliminary Datasheet SI1000, 30S.SI1000.A.10.18. Available online: https://www.colibrys.com/wp-content/uploads/2019/02/30s-si1000-a-10-18.pdf (accessed on 27 July 2021).
- Mouser Electronics, Inc. ADXL355. Available online: https://www.mouser.de/c/sensors/motion-position-sensors/accelerometers/?q=ADXL355 (accessed on 27 July 2021).
- Digi-Key Corporation. BMA280. Available online: https://www.digikey.de/de/products/detail/bosch-sensortec/BMA280/3078058 (accessed on 27 July 2021).
- Digi-Key Corporation. MPU6500. Available online: https://www.digikey.de/de/products/detail/tdk-invensense/MPU-6500/4385412 (accessed on 27 July 2021).
- Avnet ACCELEROMETER SI1003. A; Safran Colibrys. Available online: https://www.avnet.com (accessed on 27 July 2021).
- HEIDENHAIN Brochure Rotary Encoders 2020. Available online: https://www.heidenhain.com/fileadmin/pdf/en/01_Products/Produktinformationen/PI_Rotary_Encoders_for_the_Elevator_Industry_ID587718_en.pdf (accessed on 27 July 2021).
- Fan, A. Analog Dialogue: How to Improve the Accuracy of Inclination Measurement Using an Accelerometer. Available online: https://www.analog.com/media/en/analog-dialogue/volume-52/number-1/how-to-improve-the-accuracy-of-inclination-measurement-using-an-accelerometer.pdf (accessed on 20 September 2021).
- STMicroelectronics Desirn Tip DT0105: 1-Point or 3-Point Tumble Sensor Calibration. Available online: https://www.st.com/resource/en/design_tip/dt0105-1point-or-3point-tumble-sensor-calibration-stmicroelectronics.pdf (accessed on 27 July 2021).
- STMicroelectronics Design Tip DT0053: 6-Point Tumble Sensor Calibration. Available online: https://www.st.com/resource/en/design_tip/dm00253745-6point-tumble-sensor-calibration-stmicroelectronics.pdf (accessed on 27 July 2021).
- STMicroelectronics Design Tip DT0059: Ellipsoid or Sphere Fitting for Sensor Calibration. Available online: https://www.st.com/resource/en/design_tip/dm00286302-ellipsoid-or-sphere-fitting-for-sensor-calibration-stmicroelectronics.pdf (accessed on 27 July 2021).
- Fisher, C.J. Analog Devices Application Note AN-1057: Using an Accelerometer for Inclination Sensing. Available online: https://www.analog.com/media/en/technical-documentation/app-notes/an-1057.pdf (accessed on 20 September 2021).
- MathWorks Matlab Help Center: Atan2. Available online: https://www.mathworks.com/help/matlab/ref/atan2.html (accessed on 20 September 2021).
- IEEE Standard Definitions of Physical Quantities for Fundamental Frequency and Time Metrology—Random Instabilities. IEEE Std 1139-2008. 2009. Available online: https://ieeexplore.ieee.org/document/4797525 (accessed on 27 July 2021).
- IEEE Standard Specification Format Guide and Test Procedure for Linear, Single-Axis, Non-Gyroscopic Accelerometers. IEEE Std 1293-1998. 2008. Available online: https://ieeexplore.ieee.org/document/782464 (accessed on 27 July 2021).
- Riley, W.J. Handbook of Frequency Stability Analysis; NIST Special Publication 1065; National Institute of Standards and Technology: Gaithersburg, MD, USA; U. S. Government Printing Office: Washington, DC, USA, 2008.
- Matejček, M.; Šostronek, M. Computation and evaluation Allan Variance results. In Proceedings of the 2016 New Trends in Signal Processing (NTSP), Demanovska Dolina, Slovakia, 12–14 October 2016; pp. 1–9. [Google Scholar] [CrossRef]
- Riley, W. Stable32—Software for Frequency Stability Analysis. Available online: https://www.analog.com/media/en/technical-documentation/data-sheets/AD7745_7746.pdf (accessed on 27 July 2021).
- IEC 61298-22008. Process Measurement and Control Devices—General Methods and Procedures for Evaluating Performance—Part 2: Tests under Reference Conditions; American National Standards Institute (ANSI): New York, NY, USA, 2008. [Google Scholar]
- Herzog, M.H.; Francis, G.; Clarke, A. (Eds.) The Core Concept of Statistics. In Understanding Statistics and Experimental Design: How to Not Lie with Statistics; Springer International Publishing: Cham, Switzerland, 2019; pp. 23–50. ISBN 978-3-030-03499-3. [Google Scholar]
- Analog Devices Datasheet AD7746, Rev. 0. Available online: https://www.analog.com/media/en/technical-documentation/data-sheets/ad7745_7746.pdf (accessed on 27 July 2021).










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Sensor | Analog Devices ADXL355 [34] | Bosch BMA280 [35] | TDK InvenSense MPU6500 [36] | Safran Colibrys SI1003 [37] |
|---|---|---|---|---|
| Technology | SMM | SMM | SMM | BMM |
| No. of axes | 3 | 3 | 3 1 | 1 |
| Measurement range | ±2 g | ±2 g | ±2 g | ±3 g |
| Noise | 22.5 µg/√Hz | 120 µg/√Hz | 300 µg/√Hz | 0.7 µg/√Hz |
| Bias temperature coefficient | ±0.15 mg/K | ±1.0 mg/K | ±0.6 mg/K | ±0.3 mg/K |
| Output | Digital | Digital | Digital | Analog (voltage) |
| Package | Ceramic LCC14 | Polymer LGA | Polymer QFN | Ceramic LCC20 |
| Package size | 6 × 5.6 × 2.2 mm3 | 2 × 2 × 0.95 mm3 | 3 × 3 × 0.9 mm3 | 8.9 × 8.9 × 3.2 mm3 |
| Evaluation board size 2 | 20 × 20 × 5 mm3 | 43 × 20 × 3 mm3 | 26 × 15 × 3 mm3 | |
| Cost: Purchase quantity 500 items | 35.95 €/Item [38] | 0.99 €/Item [39] | 3.63 €/Item [40] | 279.74 €/Item [41] |
| Quantity | Value |
|---|---|
| Measurement range | ±4 pF |
| Measurement mode | Floating |
| Number of channels | 2 (multiplexed) |
| Update rate | 10 … 90 Hz |
| Output noise, rms | 2 aF/√Hz |
| Interface | I2C |
| Temperature range | −40 … +125 °C |
| Temperature sensor | Integrated or external RTD, thermistor, or diode 1 |
| Sensor | MID | PCB 1 | PCB 2 |
|---|---|---|---|
| Technology | MID | Stacked PCB | Stacked PCB |
| No. of sensor elements | 1 | 1 | 2 |
| Measurement range | ±60° | 360° | 360° |
| Size sensor element | 13 × 16 × 3 mm3 | 18 × 18 × 5 mm3 | 18 × 18 × 5 mm3 |
| Size sensor with PCB 1 | 33 × 21 × 5 mm3 | 39 × 20 × 5 mm3 | 48 × 20 × 5 mm3 |
| CDC | Analog Devices AD7746, 24 bit | ||
| Data rate | 5.4 Hz | 5.1 Hz | 5.1 Hz |
| Estimated costs 2 | ~30 € | ~19 € | ~20 € |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Schwenck, A.; Guenther, T.; Zimmermann, A. Characterization and Benchmark of a Novel Capacitive and Fluidic Inclination Sensor. Sensors 2021, 21, 8030. https://doi.org/10.3390/s21238030
Schwenck A, Guenther T, Zimmermann A. Characterization and Benchmark of a Novel Capacitive and Fluidic Inclination Sensor. Sensors. 2021; 21(23):8030. https://doi.org/10.3390/s21238030
Chicago/Turabian StyleSchwenck, Adrian, Thomas Guenther, and André Zimmermann. 2021. "Characterization and Benchmark of a Novel Capacitive and Fluidic Inclination Sensor" Sensors 21, no. 23: 8030. https://doi.org/10.3390/s21238030
APA StyleSchwenck, A., Guenther, T., & Zimmermann, A. (2021). Characterization and Benchmark of a Novel Capacitive and Fluidic Inclination Sensor. Sensors, 21(23), 8030. https://doi.org/10.3390/s21238030