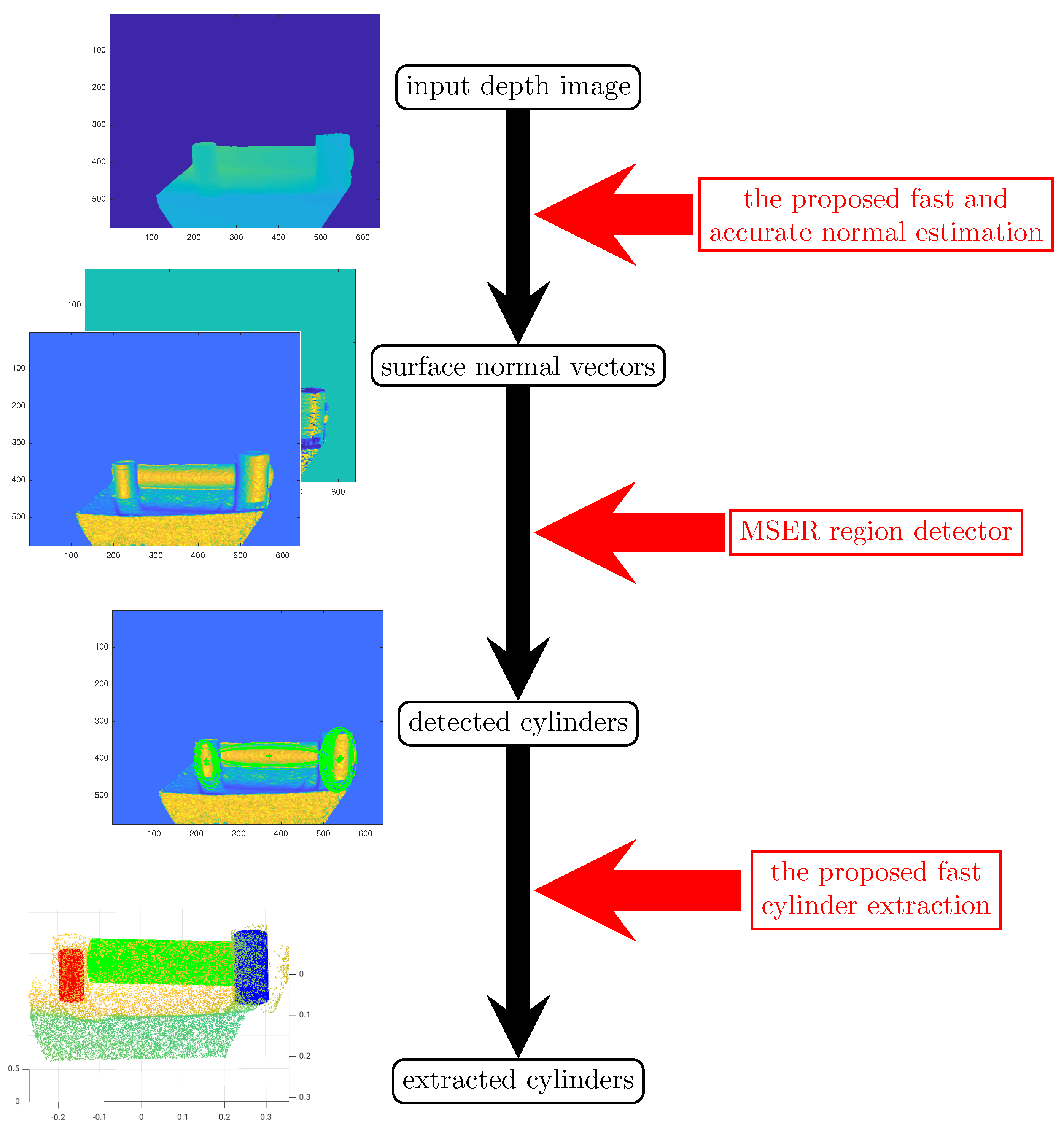
The problem of a cylinder extraction in point cloud data can be divided into three successive steps. At the first step, the input point cloud (3D points in Cartesian coordinates) may be represented in another feature space to deal with useful information. The orientation of surface normal vectors is one of the most common features used in 3D data processing [
18,
19,
20,
21]. There have been significant efforts dedicated to normal estimation from point cloud data in the literature. However, there is still a lack of fast and robust methods for normal estimation. This problem is investigated in depth in
Section 2.1. Thereafter, the problem regarding cylinder detection and extraction is described in
Section 2.2.
2.1. Normal Estimation from Point Clouds
Normal vectors estimation [
22,
23,
24] is the cornerstone of many 3D computer vision tasks such as segmentation [
25], registration [
26], surface construction [
27], object recognition [
28], and others. The most common approach to estimate the surface normal vector at a point is to fit a plane to a local neighborhood of the query point and determine the vector normal to the tangent plane (See
Appendix A). Numerous efforts have been made over the last decade to improve the accuracy of the surface normal estimation for unorganized point clouds. In [
29], robust statistics are used to fit the optimum tangent plane for points located on high curvature surfaces. Boulch et al. [
30] used Randomized Hough Transform (RHT) with statistical exploration bounds to preserve sharp features robustly. They also used a fixed-size accumulator to decrease the execution time of the estimation process. Liu et al. [
31] took advantage of the results of tensor voting to decrease the estimation error. Since their algorithm has huge computational complexity, they used a GPU-based implementation in order to meet the requirements of real-time processing. In [
32], the Deterministic MM-estimator (DetMM) is used to exclude outlier points for robust normal estimation. In addition to classical data processing techniques, deep learning-based methods have recently attracted the attention of the research community for surface normal vector estimation [
22,
33].
While many research studies dedicated to normal estimation for unorganized point clouds are reported in the literature, normal estimation directly from a depth map (organized point cloud) has received less attention. Computing normal vectors from depth images has the following advantages:
The points in the local neighborhood of the point for which the normal is computed are known while for unorganized point clouds, an extra processing step is needed to determine the points belonging to this neighborhood.
Most operations on organized point clouds can be performed using 2D operators and they are generally faster than 3D operations.
The normal vectors can be computed during the scanning process.
Despite the advantages of normal estimation from depth maps, there are still some challenges. First, the input depth image is contaminated by measurement noise. Also, sharp depth discontinuities in the image can reduce the robustness of the estimated normal vectors. Fortunately, due to recent advances in scanning technology, high-quality scanners are available even at the consumer-grade level. Thus, by following a proper strategy, normal vectors can be computed directly from a raw depth map in a fast and robust manner.
Some research in the literature focuses on the estimation of normal vectors directly from input depth images. Tang et al. [
34] proposed a closed-form solution for normal vectors at each point. However, erroneous formulation in tangent vectors and approximation of first-order derivatives led to a poor result in terms of accuracy. Holzer et al. [
35] used an adaptive neighboring size for each point to increase the accuracy of normal estimation in sharp edges. They also used integral images for the sake of computational efficiency. The first problem related to their method is that no analytical method for the determination of the design parameters is reported and the parameters are simply computed empirically. Their method has large errors for small objects with high surface curvature. One of the most accurate normal estimation methods from a depth map was presented by Nakagawa et al. [
36]. While the tangent vector construction is performed accurately, the use of single-pixel padded approximation of first-order partial derivatives and propagation of that error after a cross product of tangent vectors led to a poor and noisy result. In
Section 3, we propose a fast and robust method for the estimation of normal vectors from raw depth maps that addresses all of the above issues.
2.2. Cylinder Detection and Extraction
The previously presented research works for cylinder detection and extraction suffer from two main drawbacks:
They are only able to detect (or extract) one cylinder at a time. The points belonging to each detected cylinder must be removed from the point cloud before starting the detection process of the next cylinder.
The success or failure of the detection algorithm strongly depends on the initial point (seed) selection. Without a proper strategy for robust initial point selection, the main cylinder detection module often fails.
Depth measurement errors are present in images captured by 3D sensors including the Microsoft Kinect [
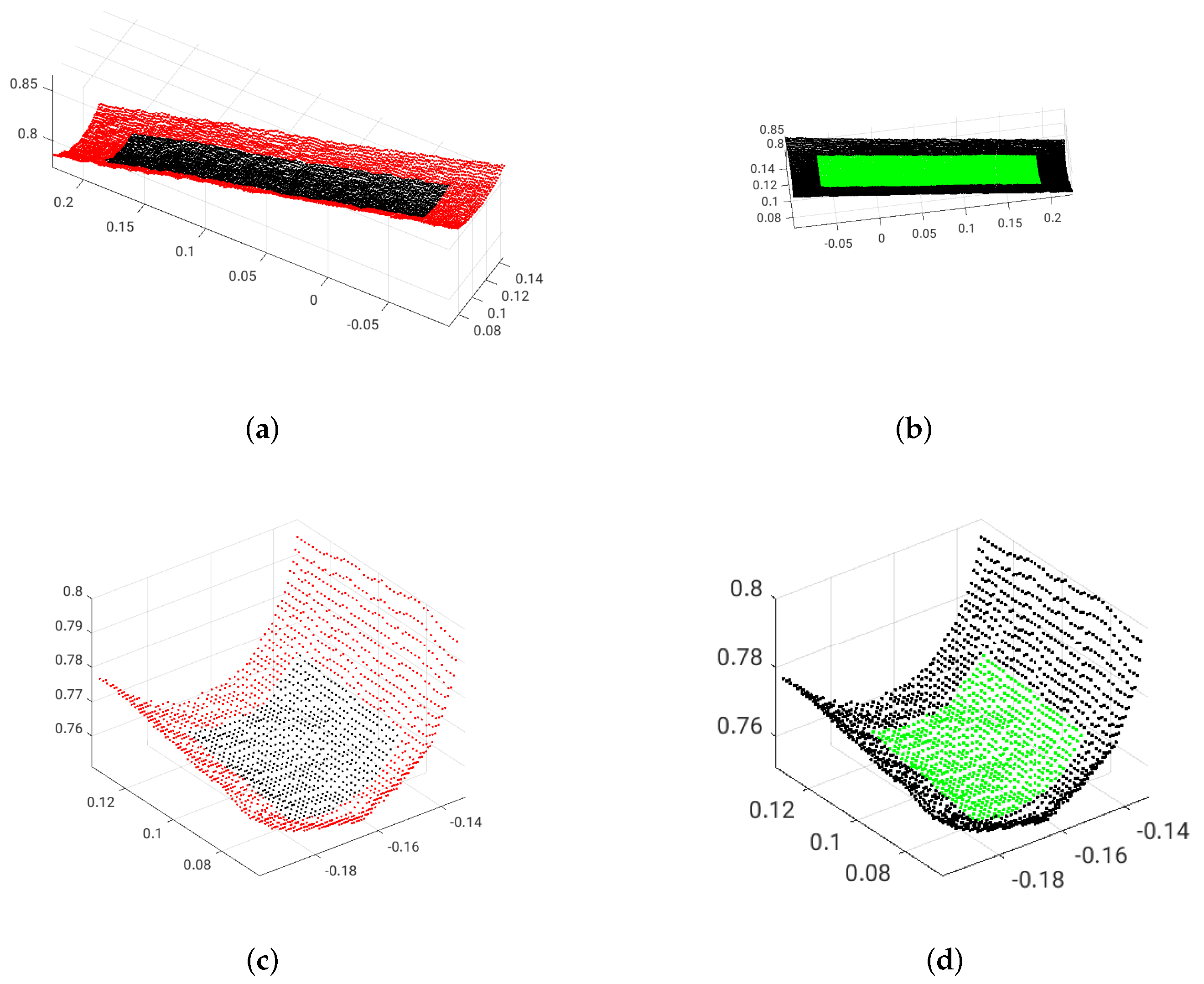
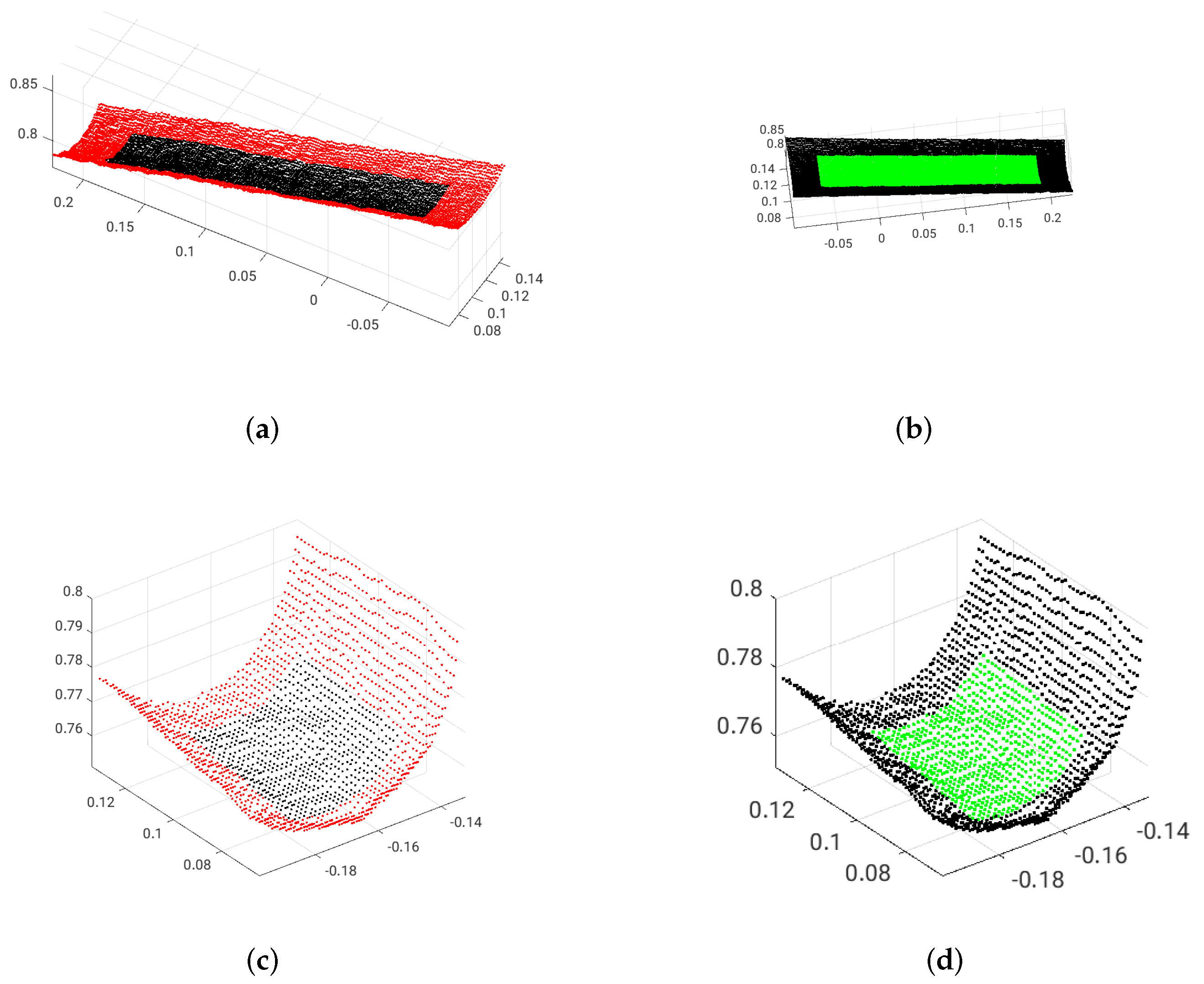
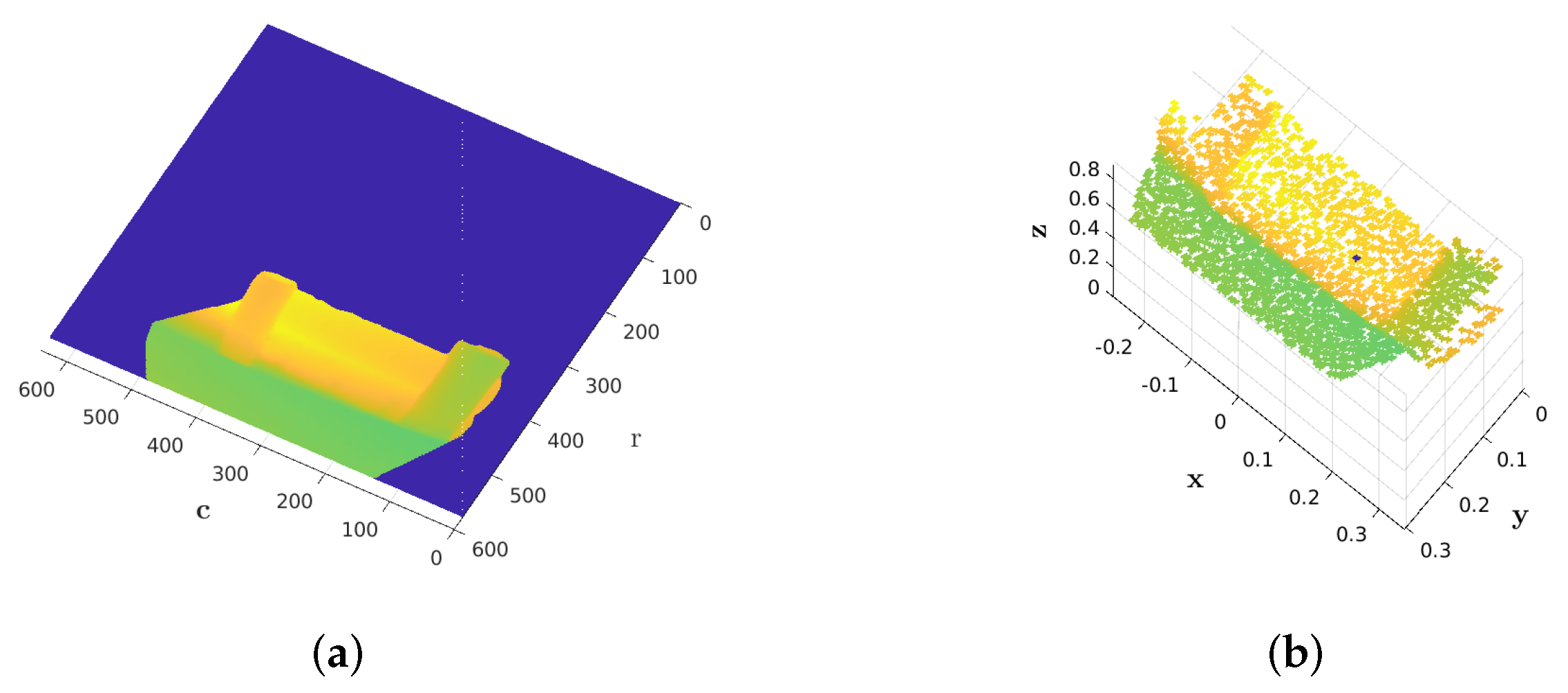
37]. These errors, especially outliers, are more often present near object boundaries and affect the resulting point clouds. When a local neighborhood is constructed around a query point in order to find a geometric primitive, it should not include these outliers to avoid erroneous extraction. For instance,
Figure 1 shows examples of good and poor areas for initial sample selection by a cylinder extraction algorithm. The green points are good candidates for initial sample selection, while choosing the seed point among red ones may result in failure of the cylinder extraction process. Therefore, an effective cylinder detection algorithm should be able to robustly detect good initial points and reject poor ones. As shown in
Figure 1, the proper candidate points for initial sample selection are located far from object boundaries.
In addition to the problem relevant to the initial sample selection, multiple cylinder detection has also not been investigated in depth in the literature. Generally, a recursive process is used to detect (or extract) all of the cylinders present in the scene. To this end, after extracting the first cylinder, the points belonging to this cylinder are removed from the scene and the detection process is started over until there are no cylinders remaining in the scene. The main drawbacks of this approach are:
The whole process must be repeated for each cylinder. The overall execution time is increased drastically when many cylinders should be extracted in the scene.
Since the whole point cloud is modified after each detection step, the previous computations may not be reusable.
The initial sample selection criterion should be met at each detection step.
In the next section, an approach circumventing these problems is proposed for multiple cylinder extraction.










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}