
A Self-Powered and Battery-Free Vibrational Energy to Time Converter for Wireless Vibration Monitoring

 , ,
, ,  ,
, 

Abstract
:1. Introduction
2. Related Work
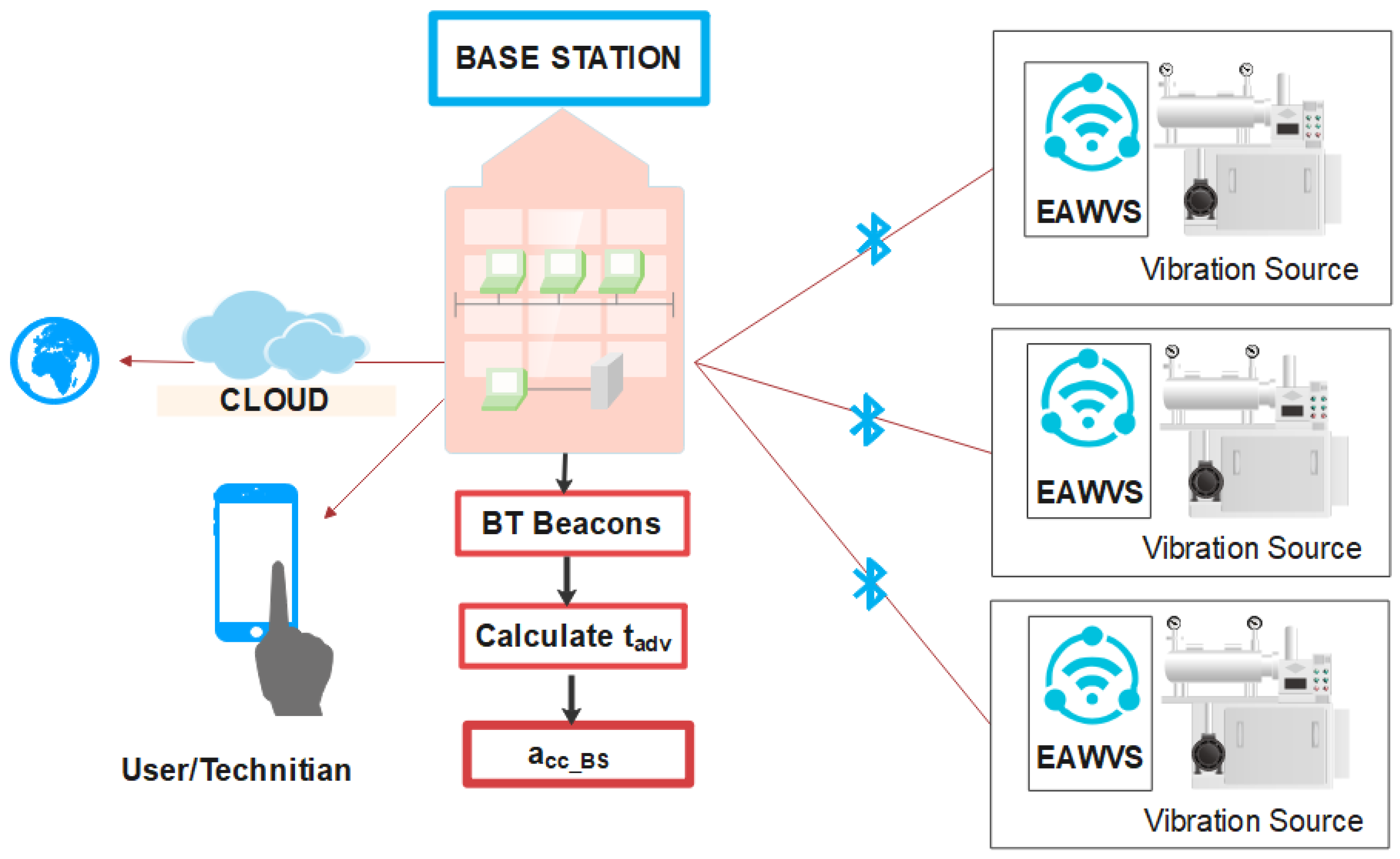
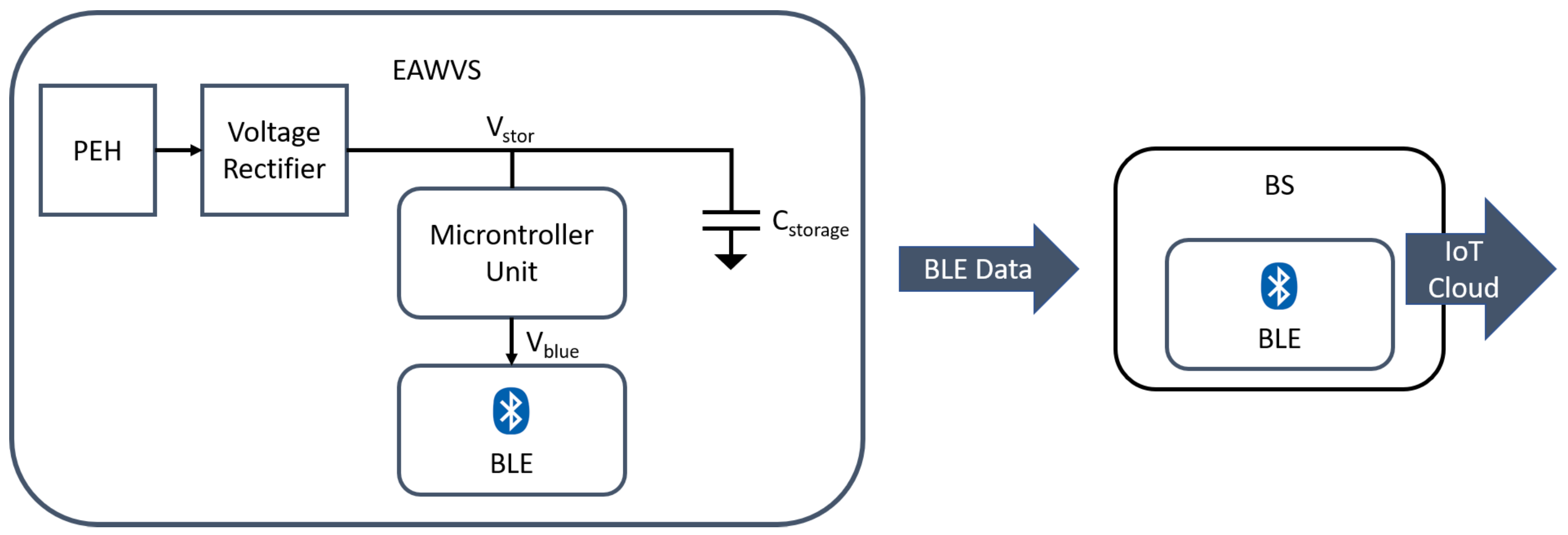
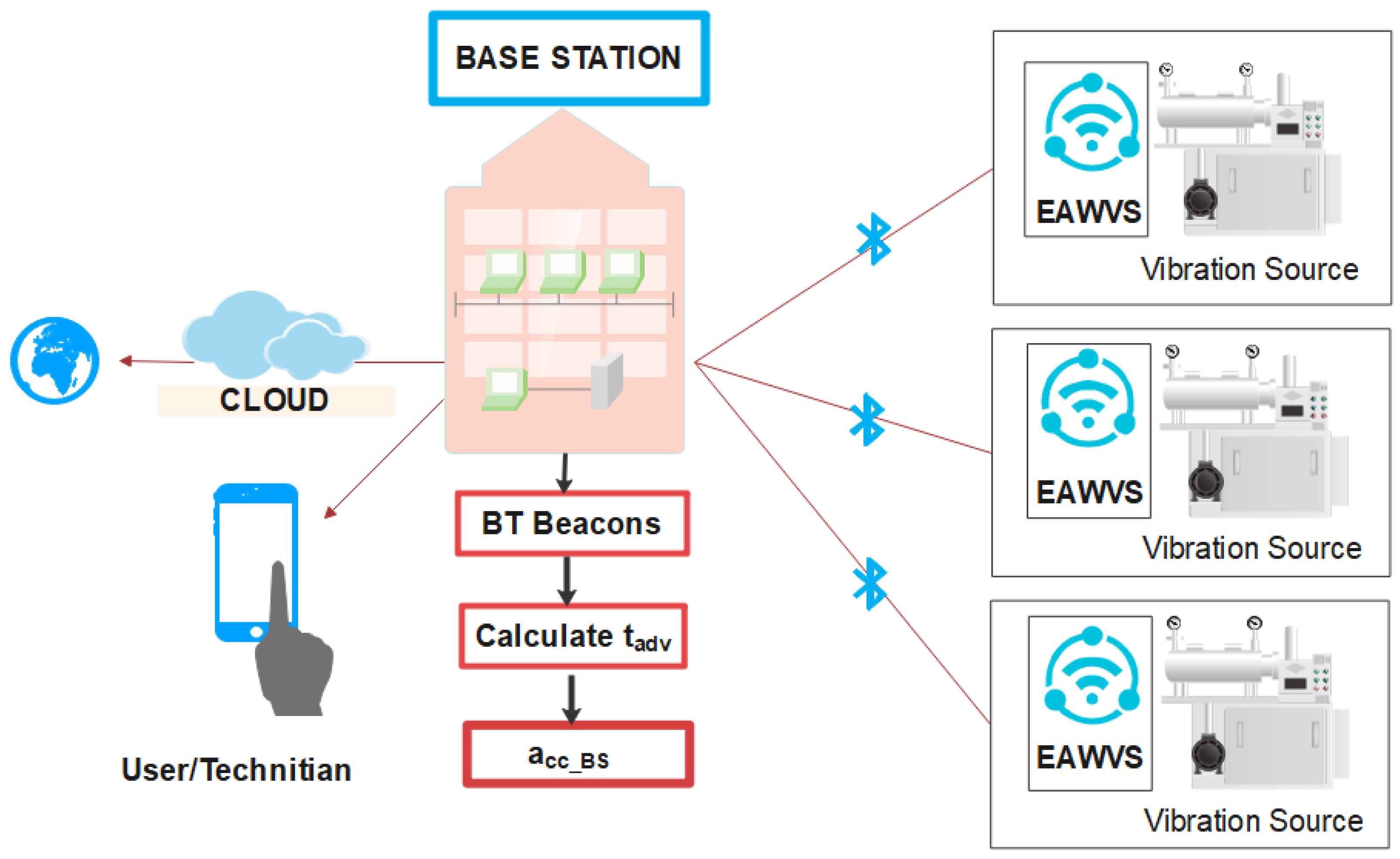
3. System Description
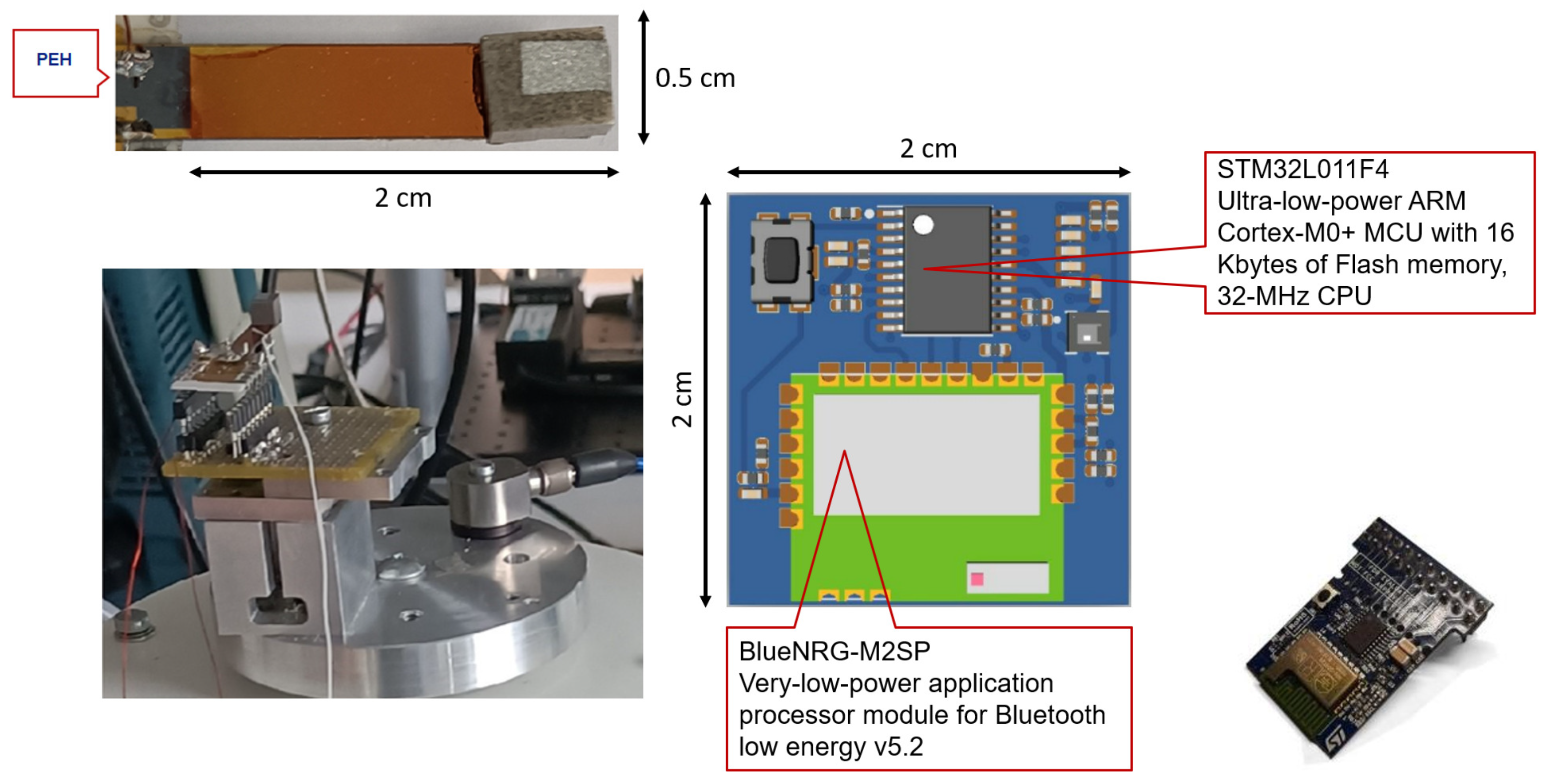
- The energy-autonomous wireless vibration sensor (EAWVS): the main requirement of this block is to be energy-autonomous and battery-free.
- The base station (BS): This device is powered by a stable power source such as a battery or wired power supply. Its function is to process the incoming wireless data from one or more EAWVSs and process the subsequent implementation phases to control the machinery, including sending the data to the cloud.
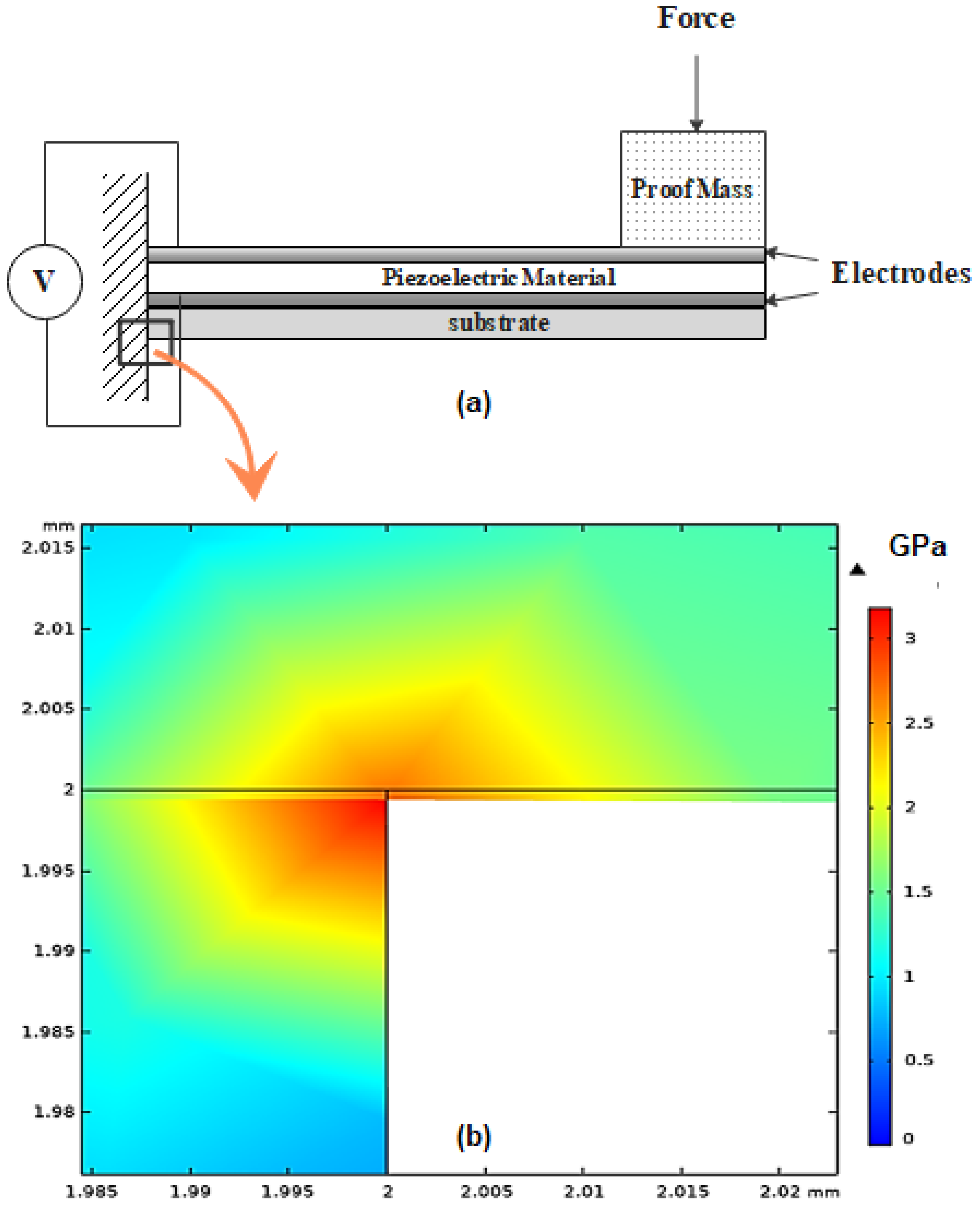
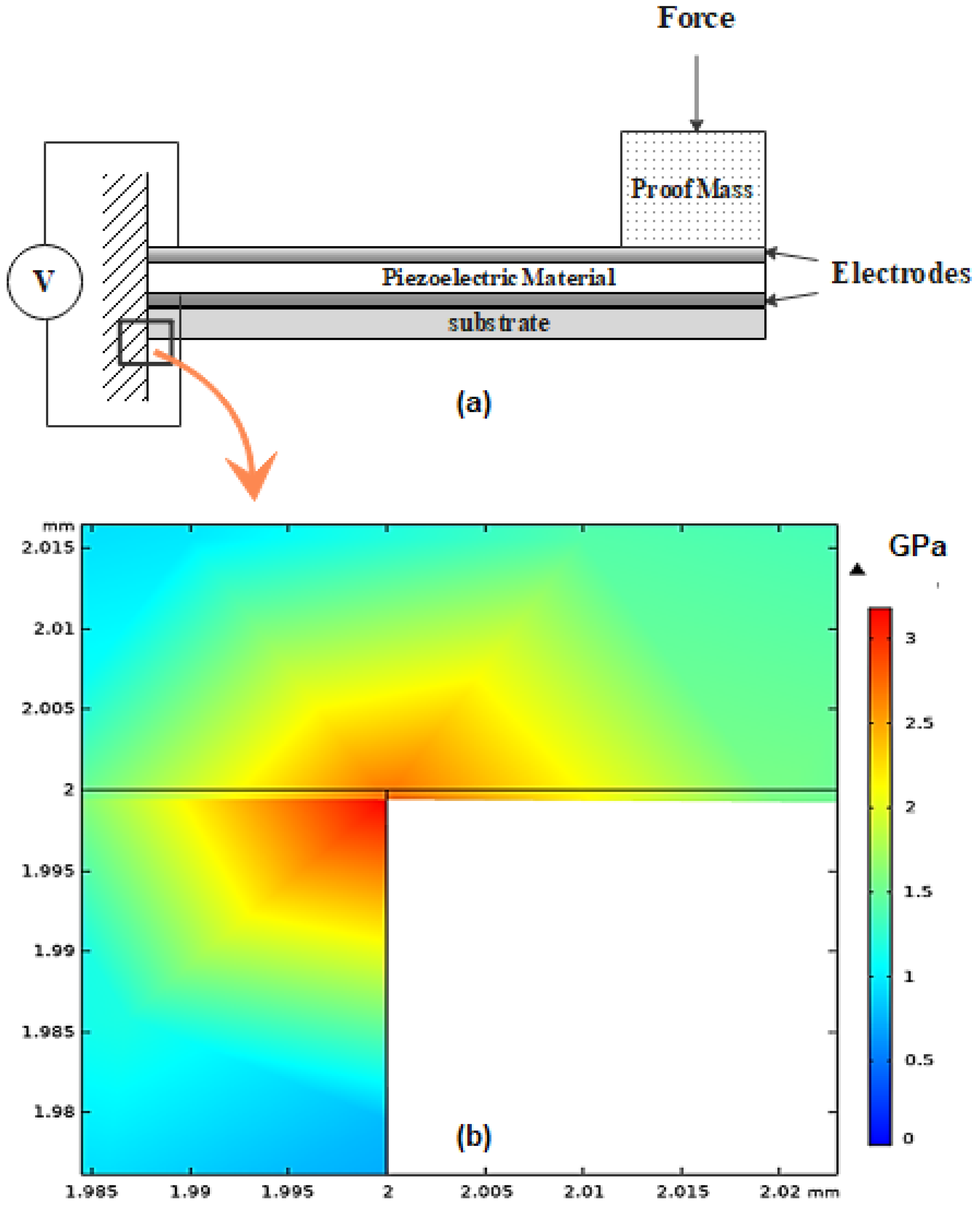
4. Piezoelectric Energy Harvester Design and Fabrication
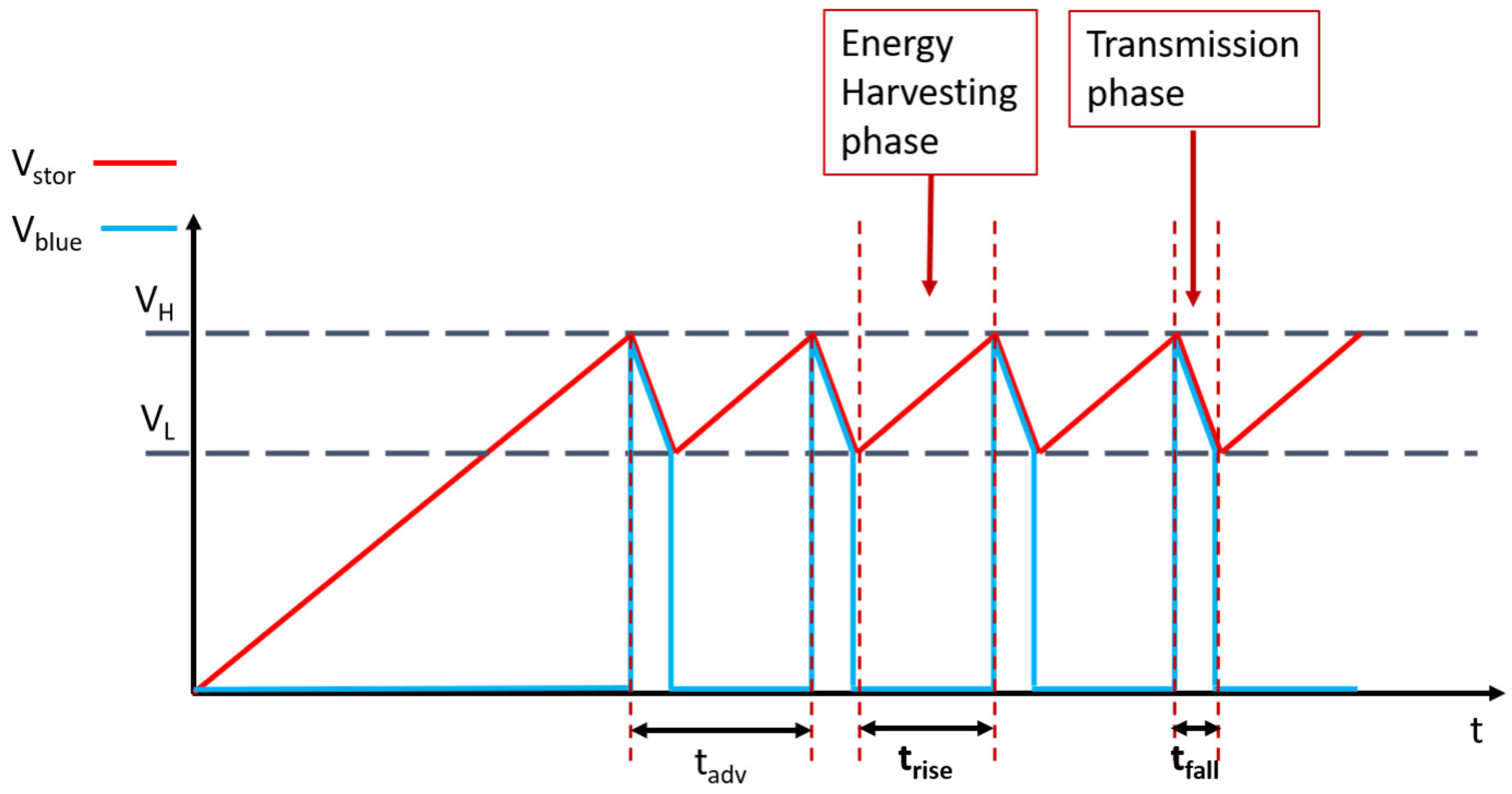
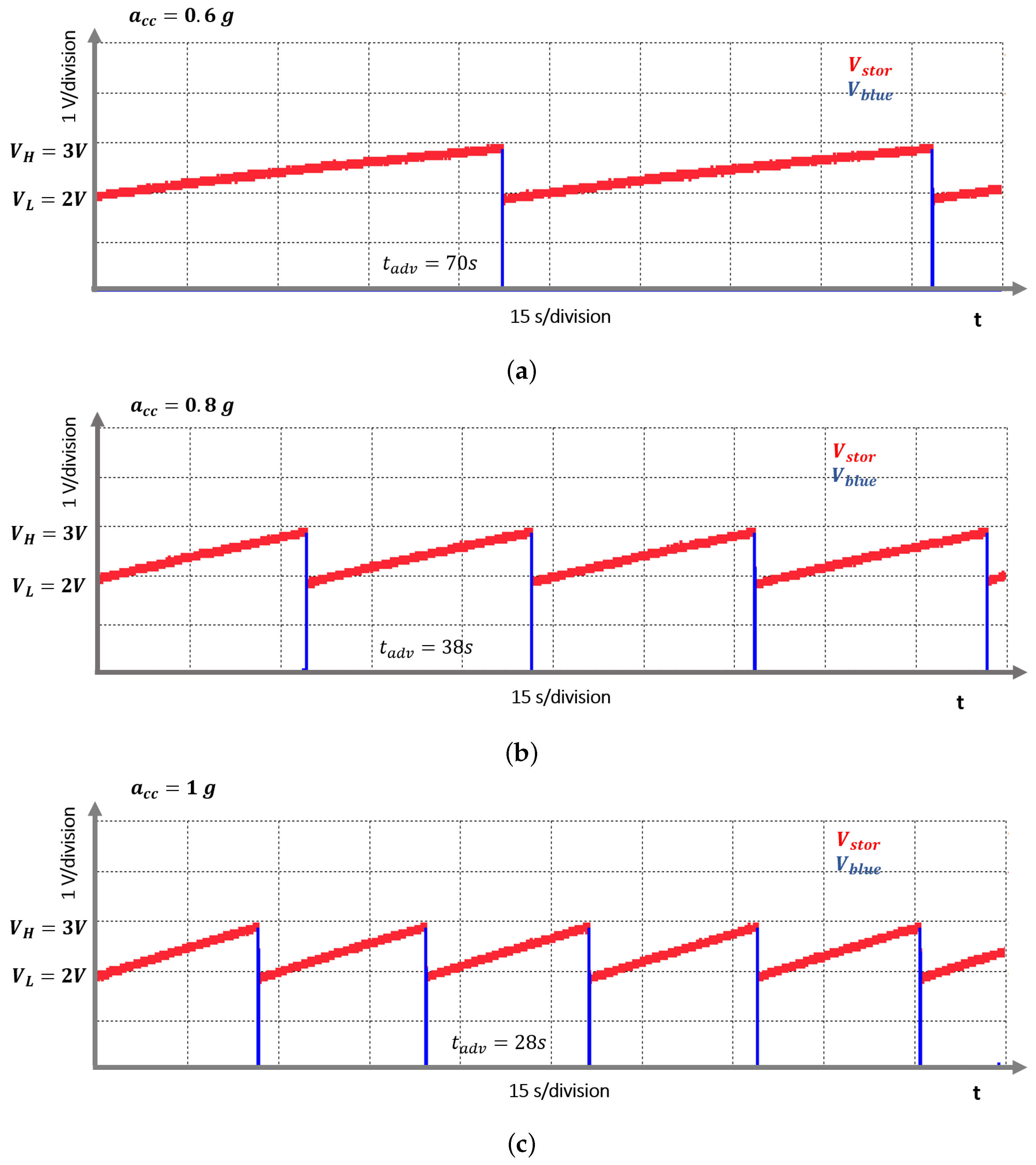
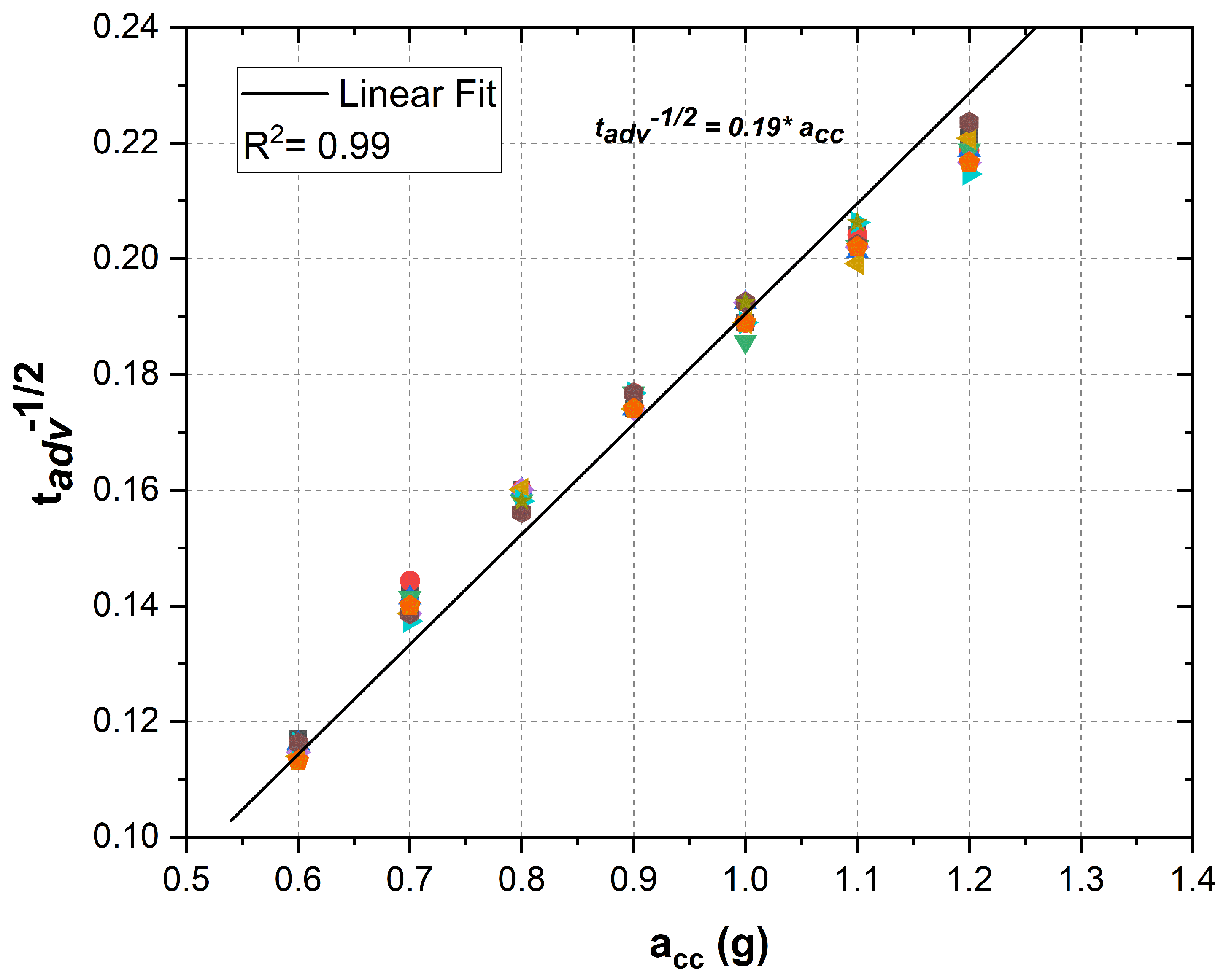
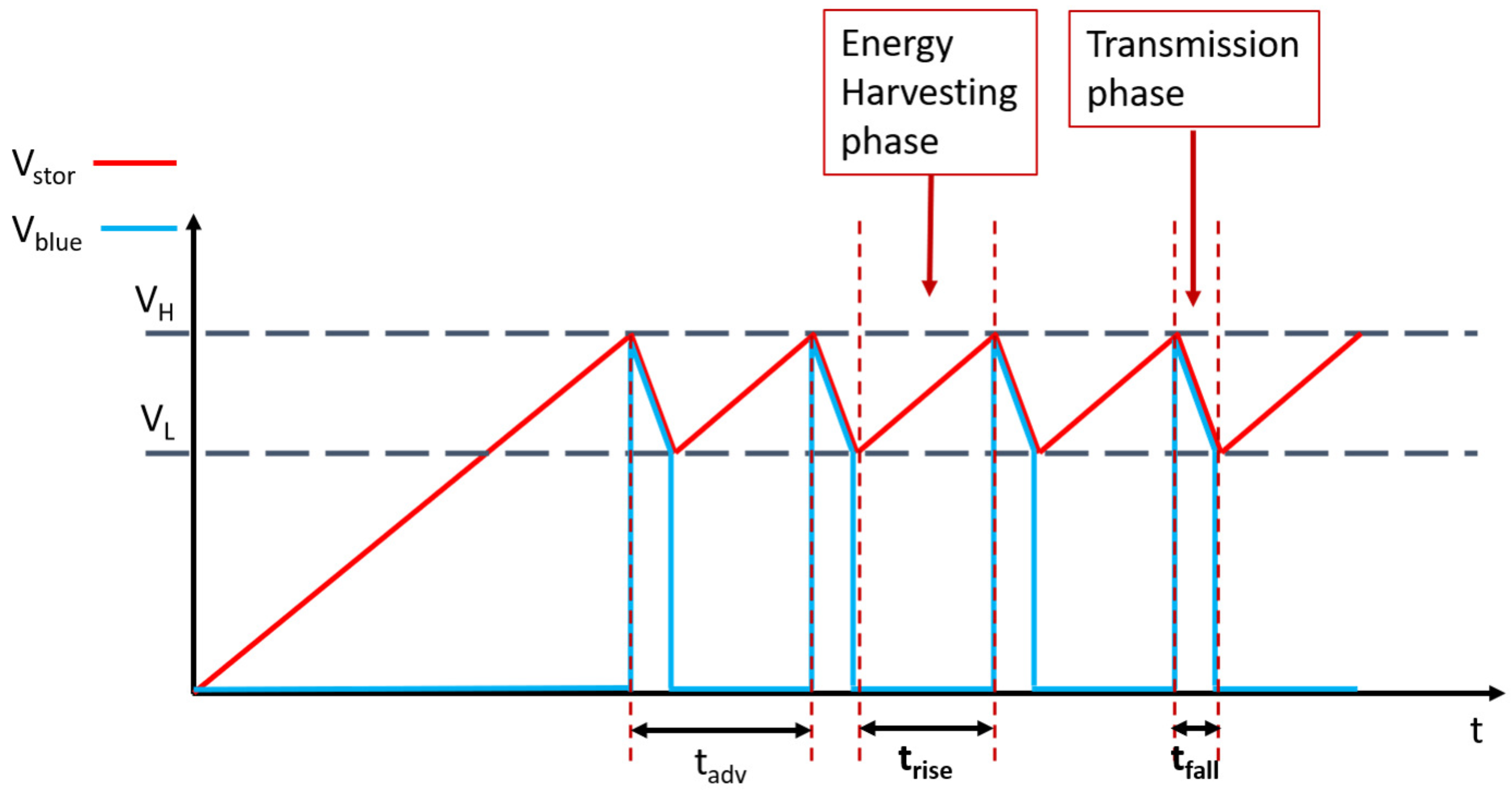
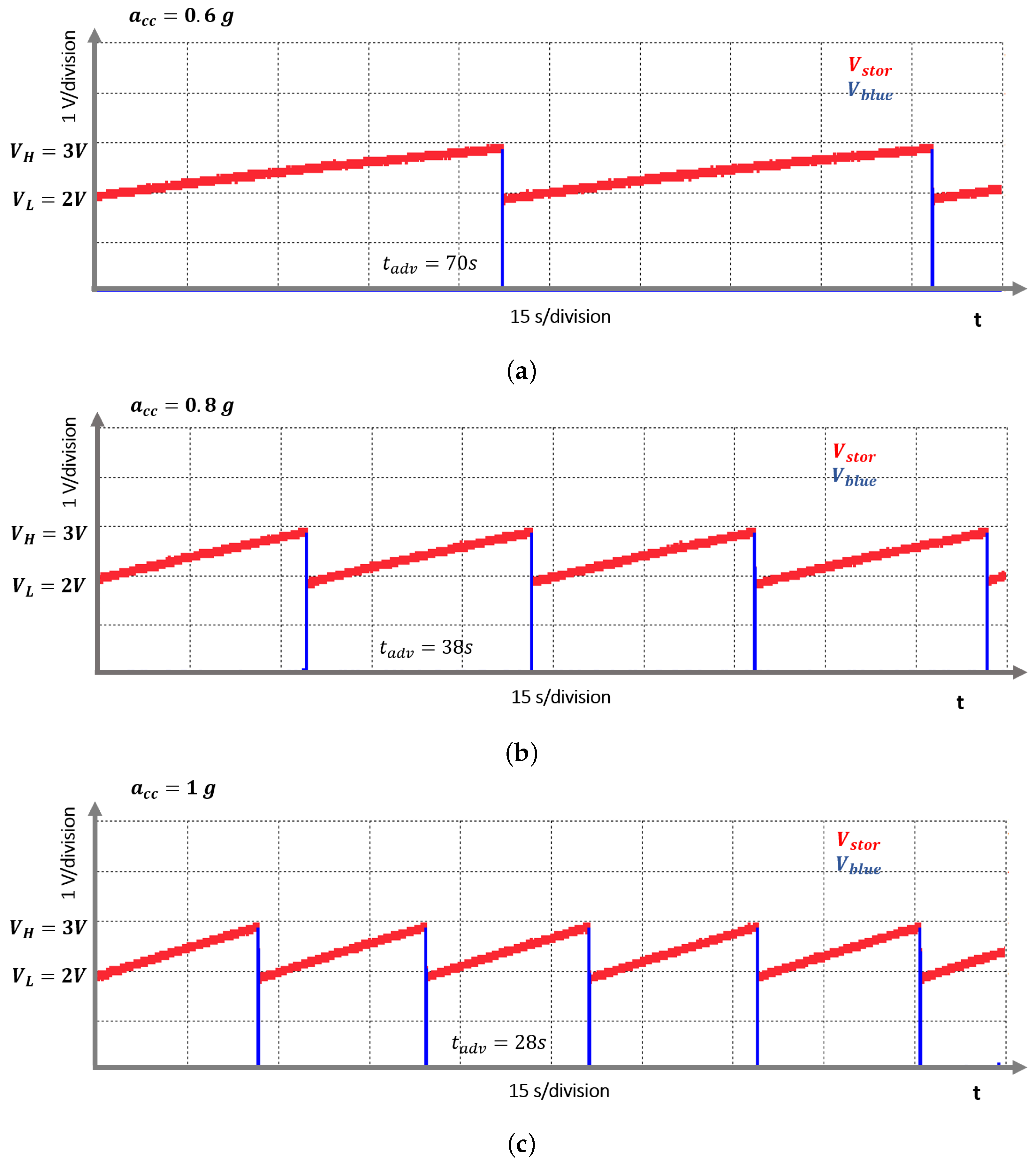
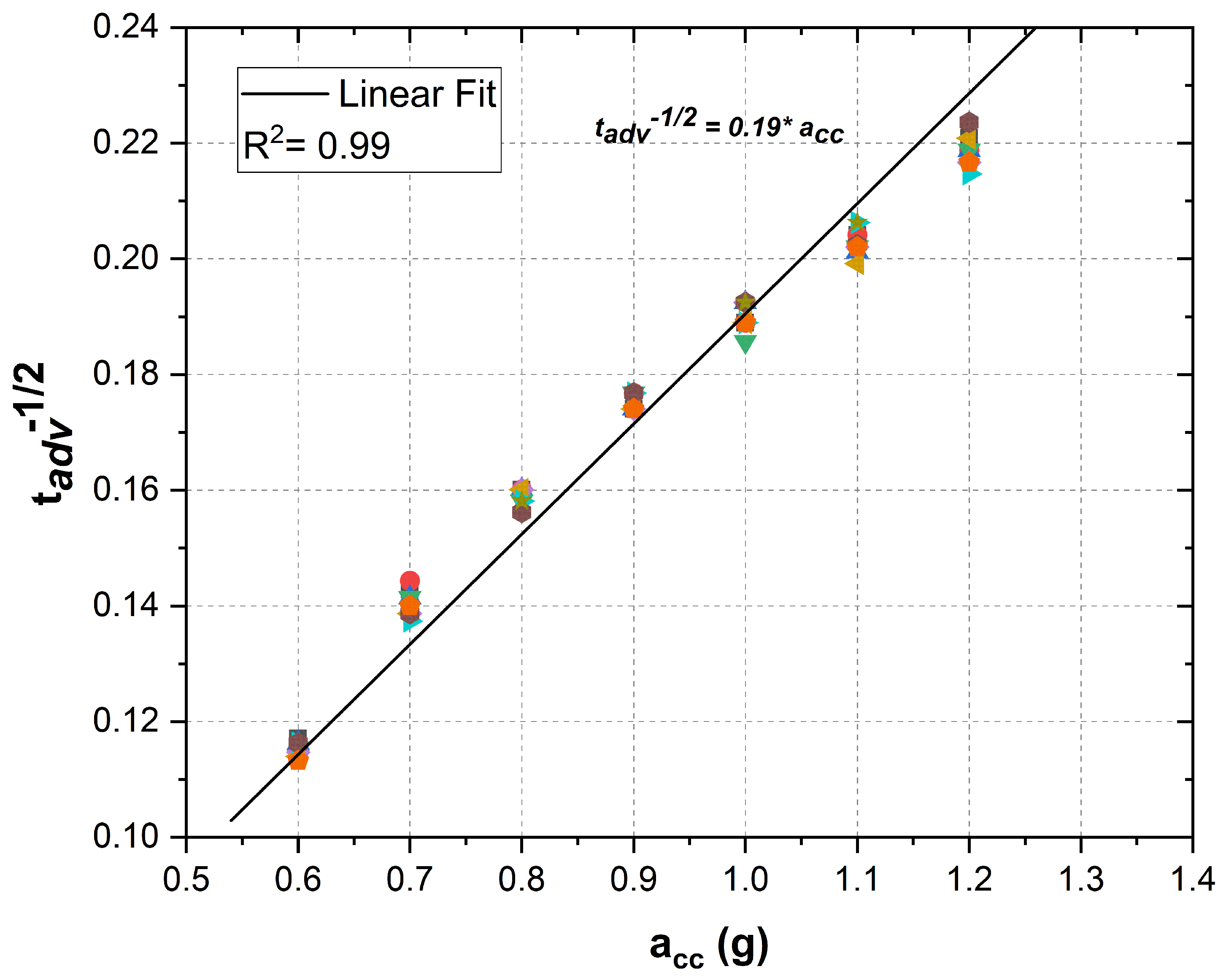
5. Vibrational Energy to Time Convertion
- is the piezoelectric coefficient of lithium niobate (27 pm/V);
- l is the length of piezoelectric transducer (2 cm);
- m is the effective mass of the proof mass-cantilever system (2.3 grams);
- is the amplitude of input acceleration;
- A is the area of the electrode cm;
- is the relative dielectric permittivity of LN (YXl)/128 (50.5).
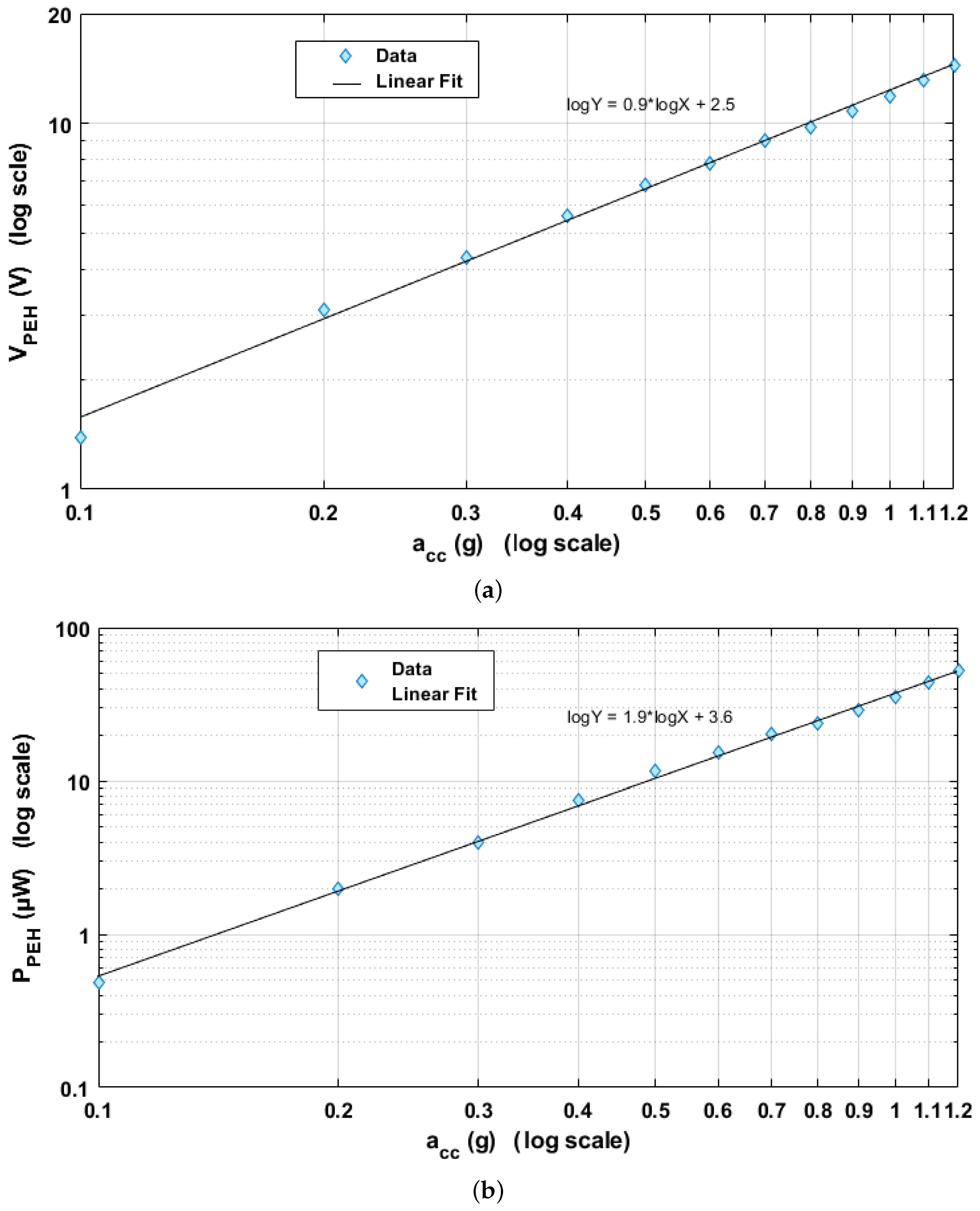
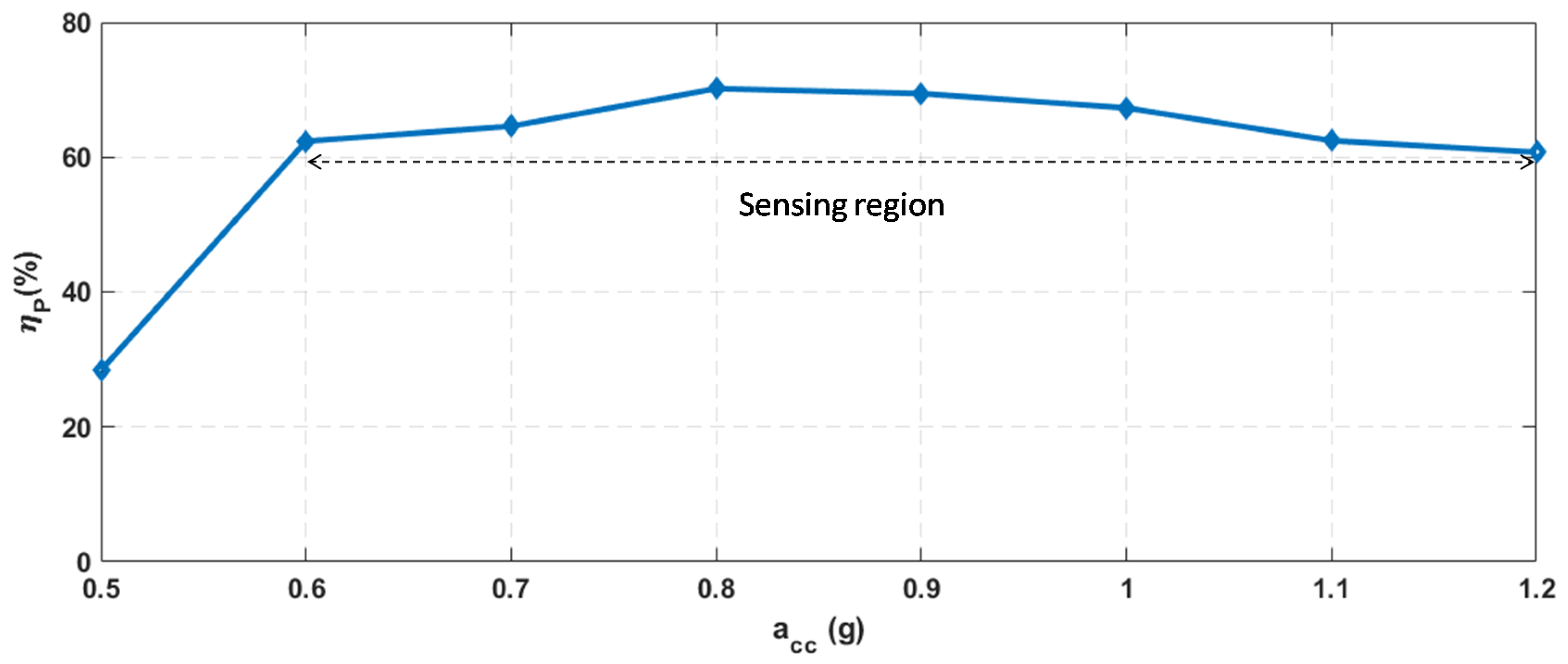
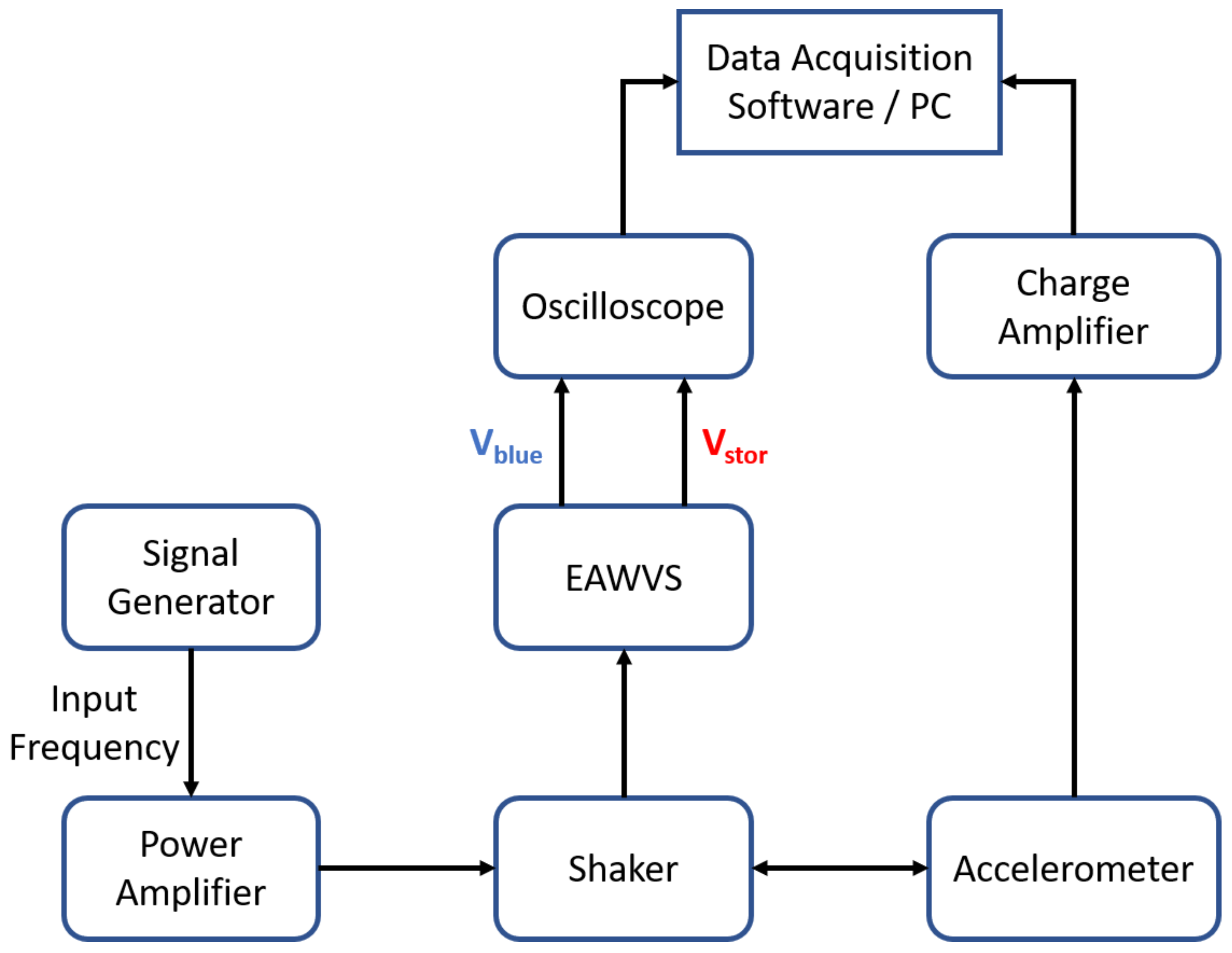
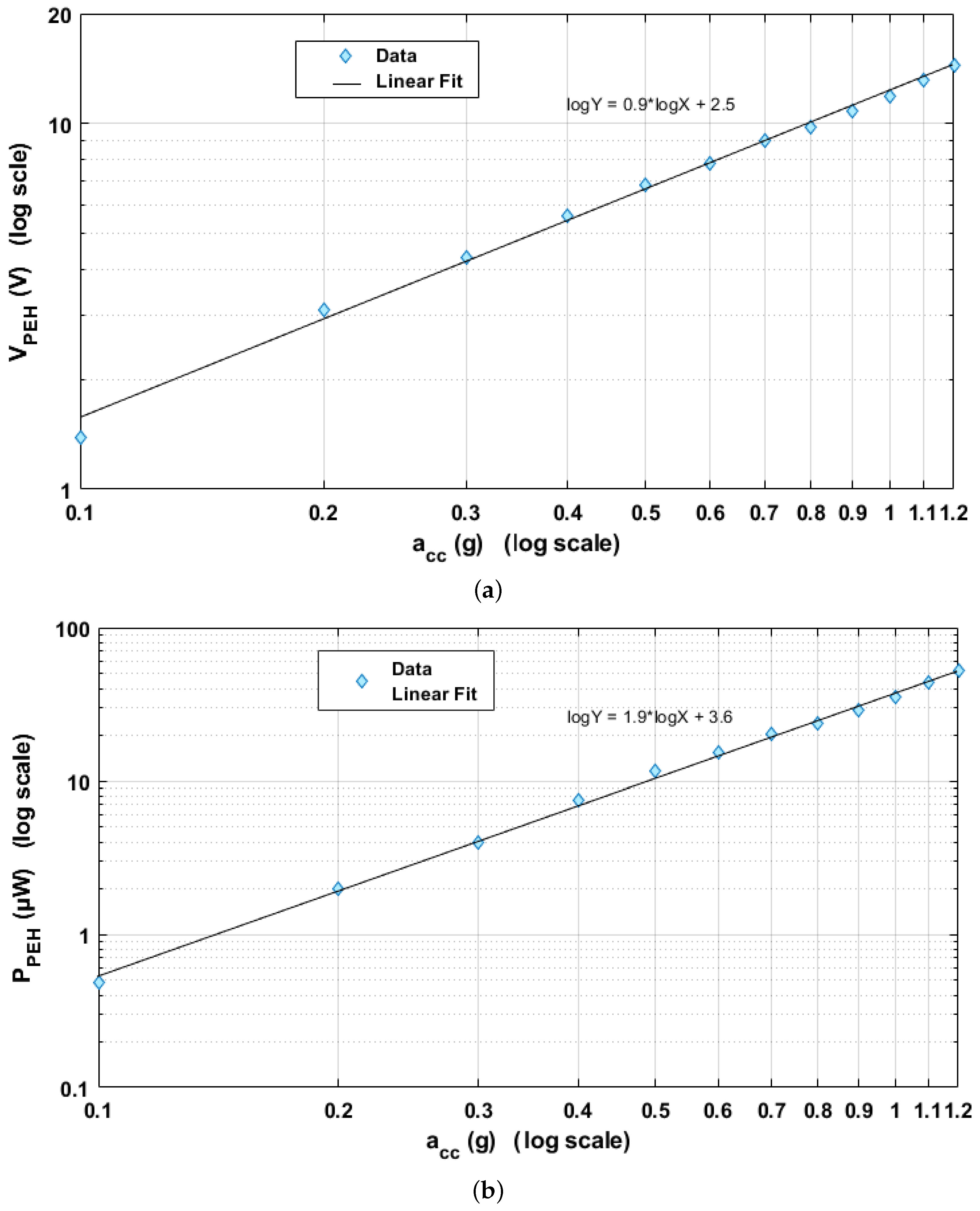
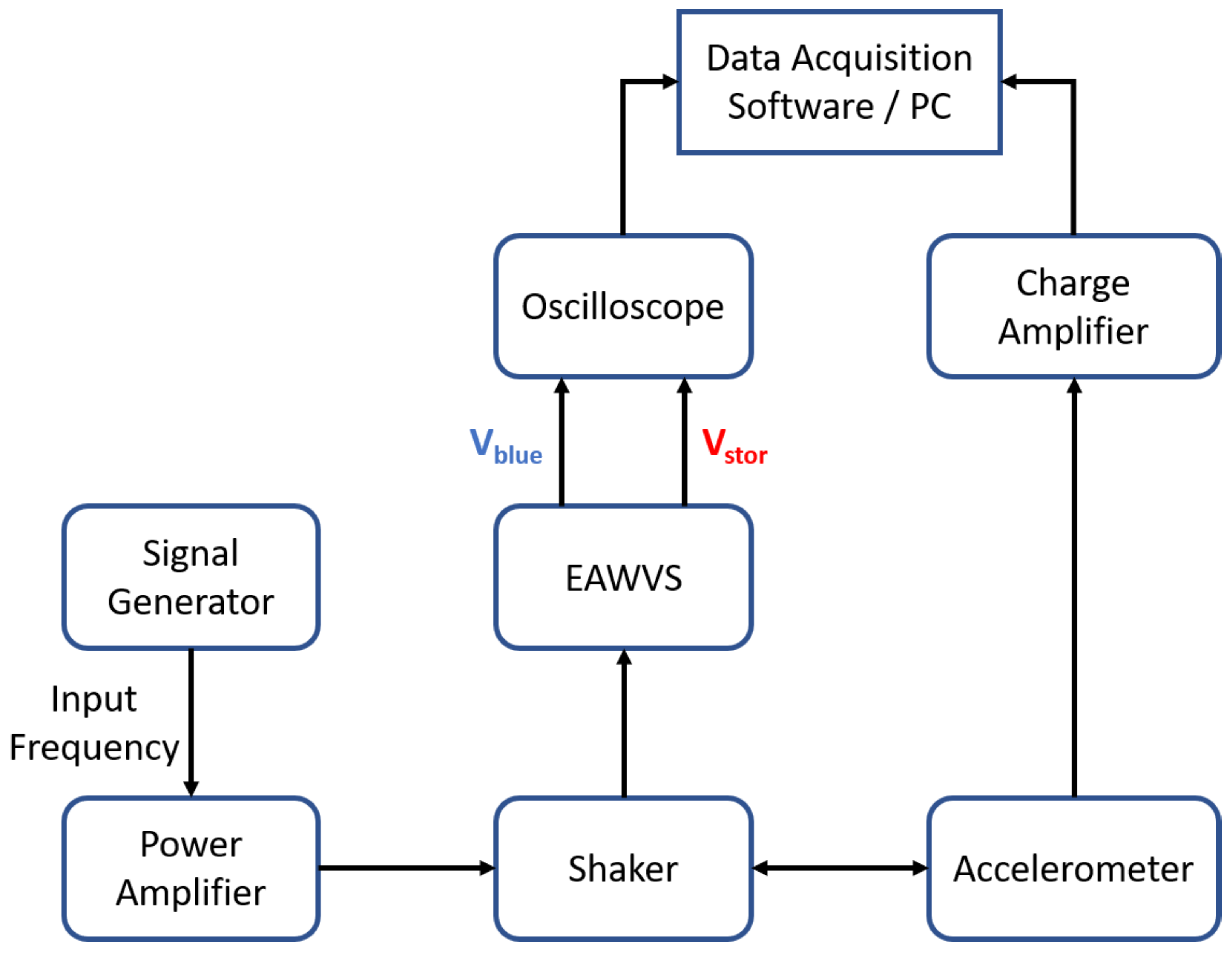
6. Experimental Setup and Measurements
- A signal generator: this equipment (Agilent 3500B) is used to control the input frequency and the vibration amplitude of the shaker;
- Power amplifier: a 100 W power amplifier (PA 100E Data Physics) that amplifies the signal provided by the signal generator;
- Shaker: the electrodynamic shaker (SignalForce from Data Physics) provides the input vibration for the PEH;
- Accelerometer and charge amplifier: these devices are implemented with the PCB Piezotronics 355B04 accelerometer. They are connected to the shaker to measure the input acceleration in real time.
7. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Acknowledgments
Conflicts of Interest
References
- Landaluce, H.; Arjona, L.; Perallos, A.; Falcone, F.; Angulo, I.; Muralter, F. A review of iot sensing applications and challenges using RFID and wireless sensor networks. Sensors 2020, 20, 2495. [Google Scholar] [CrossRef]
- Mahale, R.B.; Sonavane, S. Smart Poultry Farm Monitoring Using IOT and Wireless Sensor Networks. Int. J. Adv. Res. Comput. Sci. 2016, 7, 187–190. [Google Scholar]
- Islam, S.M.R.; Lloret, J.; Zikria, Y.B. Internet of Things (IoT)-Based Wireless Health: Enabling Technologies and Applications. Electronics 2021, 10, 148. [Google Scholar] [CrossRef]
- Raj, A.; Steingart, D. Power sources for the internet of things. J. Electrochem. Soc. 2018, 165, B3130. [Google Scholar] [CrossRef]
- Saravanan, M.; Ajayan, J.; Jondhale, S.R.; Mohankumar, P. An Overview of Energy Harvesting Techniques for Future Internet of Things Applications. In Internet of Things in Smart Technologies for Sustainable Urban Development; Springer International Publishing: Cham, Switzerland, 2020; pp. 107–129. [Google Scholar]
- La Rosa, R.; Livreri, P.; Trigona, C.; Di Donato, L.; Sorbello, G. Strategies and techniques for powering wireless sensor nodes through energy harvesting and wireless power transfer. Sensors 2019, 19, 2660. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- La Rosa, R.; Dehollain, C.; Burg, A.; Costanza, M.; Livreri, P. An Energy-Autonomous Wireless Sensor with Simultaneous Energy Harvesting and Ambient Light Sensing. IEEE Sens. J. 2021, 21, 13744–13752. [Google Scholar] [CrossRef]
- Callebaut, G.; Leenders, G.; Van Mulders, J.; Ottoy, G.; De Strycker, L.; Van der Perre, L. The Art of Designing Remote IoT Devices—Technologies and Strategies for a Long Battery Life. Sensors 2021, 21, 913. [Google Scholar] [CrossRef]
- La Rosa, R.; Trigona, C. A Fully Autonomous Platform for Power Measurement of Environmental RF Sources based on a Time Domain Readout. Measurement 2020, 165, 108115. [Google Scholar] [CrossRef]
- La Rosa, R.; Dehollain, C.; Livreri, P. Advanced monitoring systems based on battery-less asset tracking modules energized through rf wireless power transfer. Sensors 2020, 20, 3020. [Google Scholar] [CrossRef] [PubMed]
- Rabaey, J.M.; Ammer, J.; Karalar, T.; Li, S.; Otis, B.; Sheets, M.; Tuan, T. PicoRadios for wireless sensor networks: The next challenge in ultra-low power design. In Proceedings of the 2002 IEEE International Solid-State Circuits Conference, Digest of Technical Papers (Cat. No. 02CH37315), San Francisco, CA, USA, 7 February 2002; Volume 1, pp. 200–201. [Google Scholar]
- Fu, H.; Mei, X.; Yurchenko, D.; Zhou, S.; Theodossiades, S.; Nakano, K.; Yeatman, E.M. Rotational energy harvesting for self-powered sensing. Joule 2021, 5, 1074–1118. [Google Scholar] [CrossRef]
- Lee, J.K.; Seung, H.M.; Park, C.I.; Lee, J.K.; Lim, D.H.; Kim, Y.Y. Magnetostrictive patch sensor system for battery-less real-time measurement of torsional vibrations of rotating shafts. J. Sound Vib. 2018, 414, 245–258. [Google Scholar] [CrossRef]
- Kim, Y.; Kim, Y.Y. A novel Terfenol-D transducer for guided-wave inspection of a rotating shaft. Sens. Actuators Phys. 2007, 133, 447–456. [Google Scholar] [CrossRef]
- Zappalá, D.; Bezziccheri, M.; Crabtree, C.; Paone, N. Non-intrusive torque measurement for rotating shafts using optical sensing of zebra-tapes. Meas. Sci. Technol. 2018, 29, 065207. [Google Scholar] [CrossRef]
- Micek, P.; Grzybek, D. Wireless stress sensor based on piezoelectric energy harvesting for a rotating shaft. Sens. Actuators Phys. 2020, 301, 111744. [Google Scholar] [CrossRef]
- Behdad, Z.; Mahdavi, M.; Razmi, N. A new relay policy in RF energy harvesting for IoT networks—A cooperative network approach. IEEE Internet Things J. 2018, 5, 2715–2728. [Google Scholar] [CrossRef]
- Li, Z.; Chen, Z.; Wan, Q.; Kuai, Q.; Liang, J.; Mok, P.K.; Zeng, X. An Energy Harvesting System with Reconfigurable Piezoelectric Energy Harvester Array for IoT Applications. In Proceedings of the 2020 IEEE International Symposium on Circuits and Systems (ISCAS), Seville, Spain, 12–14 October 2020; pp. 1–5. [Google Scholar]
- Panayanthatta, N.; Montès, L.; Bano, E.; Trigona, C.; La Rosa, R. Three terminal piezoelectric energy harvester based on novel MPPT design. In Proceedings of the 2019 19th International Conference on Micro and Nanotechnology for Power Generation and Energy Conversion Applications (PowerMEMS), Krakow, Poland, 2–6 December 2019; pp. 1–7. [Google Scholar]
- Naifar, S.; Bradai, S.; Viehweger, C.; Kanoun, O. Survey of electromagnetic and magnetoelectric vibration energy harvesters for low frequency excitation. Measurement 2017, 106, 251–263. [Google Scholar] [CrossRef]
- Liu, C.; Fang, L.; Zou, H.; Wang, Y.; Chi, J.; Che, L.; Zhou, X.; Wang, Z.; Wang, T.; Dong, L.; et al. Theoretical investigation and experimental verification of the self-powered acceleration sensor based on triboelectric nanogenerators (TENGs). Extrem. Mech. Lett. 2021, 42, 101021. [Google Scholar] [CrossRef]
- Dai, K.; Wang, X.; Yi, F.; Jiang, C.; Li, R.; You, Z. Triboelectric nanogenerators as self-powered acceleration sensor under high-g impact. Nano Energy 2018, 45, 84–93. [Google Scholar] [CrossRef]
- Toprak, A.; Tigli, O. Piezoelectric energy harvesting: State-of-the-art and challenges. Appl. Phys. Rev. 2014, 1, 031104. [Google Scholar] [CrossRef]
- Homayouni-Amlashi, A.; Mohand-Ousaid, A.; Rakotondrabe, M. Analytical modelling and optimization of a piezoelectric cantilever energy harvester with in-span attachment. Micromachines 2020, 11, 591. [Google Scholar] [CrossRef] [PubMed]
- Andò, B.; Baglio, S.; Marletta, V.; La Rosa, R.; Bulsara, A.R. A Nonlinear Harvester to Scavenge Energy from Rotational Motion. In Proceedings of the 2019 IEEE International Instrumentation and Measurement Technology Conference (I2MTC), Auckland, New Zealand, 20–23 May 2019; pp. 1–6. [Google Scholar]
- Andò, B.; Baglio, S.; Beninato, A. A ferrofluid inclinometer with a Time Domain Readout strategy. Sens. Actuators Phys. 2013, 202, 57–63. [Google Scholar] [CrossRef]
- Tang, H.; Fu, Z.; Huang, Y. A fault diagnosis method for loose slipper failure of piston pump in construction machinery under changing load. Appl. Acoust. 2021, 172, 107634. [Google Scholar] [CrossRef]
- Yan, X.; Zheng, M.; Zhu, M.; Hou, Y. Soft and Hard Piezoelectric Ceramics for Vibration Energy Harvesting. Crystals 2020, 10, 907. [Google Scholar] [CrossRef]
- Zhou, N.; Li, R.; Ao, H.; Zhang, C.; Jiang, H. Piezoelectric Performance of a Symmetrical Ring-Shaped Piezoelectric Energy Harvester Using PZT-5H under a Temperature Gradient. Micromachines 2020, 11, 640. [Google Scholar] [CrossRef]
- Yeo, H.G.; Trolier-McKinstry, S. Effect of piezoelectric layer thickness and poling conditions on the performance of cantilever piezoelectric energy harvesters on Ni foils. Sens. Actuators Phys. 2018, 273, 90. [Google Scholar] [CrossRef]
- Kluczek, A. Quick green scan: A methodology for improving green performance in terms of manufacturing processes. Sustainability 2017, 9, 88. [Google Scholar] [CrossRef] [Green Version]
- Marzencki, M.; Ammar, Y.; Basrour, S. Integrated power harvesting system including a MEMS generator and a power management circuit. Sens. Actuators Phys. 2008, 145, 363. [Google Scholar] [CrossRef]
- Jia, Y.; Seshia, A.A. Power Optimization by Mass Tuning for MEMS Piezoelectric Cantilever Vibration Energy Harvesting. J. Microelectromech. Syst. 2016, 25, 108. [Google Scholar] [CrossRef] [Green Version]
- Cao, Z.; He, J.; Wang, Q.; Hara, M.; Oguchi, H.; Kuwano, H. High output power AlN vibration-driven energy harvesters. J. Phys. Conf. Ser. 2013, 476, 012034. [Google Scholar] [CrossRef]
- Van Minh, L.; Hara, M.; Kuwano, H. High Performance Nonlinear Micro Energy Harvester Integrated with (K,Na)NbO3/Si Composite Quad-Cantilever. In Proceedings of the 27th International Conference on MEMS, San Francisco, CA, USA, 26–30 January 2014; p. 397. [Google Scholar]
- Nakamura, K.; Ando, H.; Shimizu, H. Bending vibrator consisting of a LiNbO3 plate with a ferroelectric inversion layer. Jpn. J. Appl. Phys. 1987, 26, 198. [Google Scholar] [CrossRef]
- Clementi, G.; Lombardi, G.; Margueron, S.; Suarez, M.A.; Lebrasseur, E.; Ballandras, S.; Imbaud, J.; Lardet-Vieudrin, F.; Gauthier-Manuel, L.; Dulmet, B.; et al. LiNbO3 films—A low-cost alternative lead-free piezoelectric material for vibrational energy harvesters. Mech. Syst. Signal Process. 2021, 149, 107171. [Google Scholar] [CrossRef]
- Clementi, G.; Ouhabaz, M.; Margueron, S.; Suarez, M.A.; Bassignot, F.; Gauthier-Manuel, L.; Belharet, D.; Dulmet, B.; Bartasyte, A. Highly Coupled and Low Frequency Vibrational Energy Harvester Using Lithium Niobate on Silicon. Appl. Phys. Lett. 2021, 119, 013904. [Google Scholar] [CrossRef]
- Arshad, R.; Zahoor, S.; Shah, M.A.; Wahid, A.; Yu, H. Green IoT: An investigation on energy saving practices for 2020 and beyond. IEEE Access 2017, 5, 15667–15681. [Google Scholar] [CrossRef]
- Wu, Z.; Cheng, T.; Wang, Z.L. Self-powered sensors and systems based on nanogenerators. Sensors 2020, 20, 2925. [Google Scholar] [CrossRef] [PubMed]
- Mossi, K.M.; Selby, G.V.; Bryant, R.G. Thin-layer composite unimorph ferroelectric driver and sensor properties. Mater. Lett. 1998, 35, 39–49. [Google Scholar] [CrossRef]
- Sodano, H.A.; Inman, D.J.; Park, G. A review of power harvesting from vibration using piezoelectric materials. Shock Vib. Dig. 2004, 36, 197–206. [Google Scholar] [CrossRef] [Green Version]
- Xiao, J.; Zou, X.; Xu, W. ePave: A self-powered wireless sensor for smart and autonomous pavement. Sensors 2017, 17, 2207. [Google Scholar] [CrossRef] [PubMed]
- Aranda, J.J.; Bader, S.; Oelmann, B. Self-Powered Wireless Sensor Using a Pressure Fluctuation Energy Harvester. Sensors 2021, 21, 1546. [Google Scholar] [CrossRef] [PubMed]
- Novello, A.; Atzeni, G.; Künzli, J.; Cristiano, G.; Coustans, M.; Jang, T. A 1.25-GHz Fully Integrated DC-DC Converter Using Electromagnetically Coupled Class-D LC Oscillators. IEEE J.-Solid-State Circuits 2021, 21, 1546. [Google Scholar] [CrossRef]
- Klinefelter, A.; Roberts, N.E.; Shakhsheer, Y.; Gonzalez, P.; Shrivastava, A.; Roy, A.; Craig, K.; Faisal, M.; Boley, J.; Oh, S.; et al. 21.3 A 6.45 μW self-powered IoT SoC with integrated energy-harvesting power management and ULP asymmetric radios. In Proceedings of the 2015 IEEE International Solid-State Circuits Conference-(ISSCC) Digest of Technical Papers, San Francisco, CA, USA, 22–26 February 2015; pp. 1–3. [Google Scholar]
- Lee, D. Energy harvesting chip and the chip based power supply development for a wireless sensor network. Sensors 2008, 8, 7690–7714. [Google Scholar] [CrossRef] [Green Version]
- De Fazio, R.; Cafagna, D.; Marcuccio, G.; Visconti, P. Limitations and characterization of energy storage devices for harvesting applications. Energies 2020, 13, 783. [Google Scholar] [CrossRef] [Green Version]
- Khatri, A.; Kumar, S.; Kaiwartya, O.; Aslam, N.; Meena, N.; Abdullah, A.H. Towards green computing in wireless sensor networks: Controlled mobility–aided balanced tree approach. Int. J. Commun. Syst. 2018, 31, e3463. [Google Scholar] [CrossRef]
- Janhunen, J.; Mikhaylov, K.; Petäjäjärvi, J.; Sonkki, M. Wireless energy transfer powered wireless sensor node for green IoT: Design, implementation and evaluation. Sensors 2019, 19, 90. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Shaikh, F.K.; Zeadally, S.; Exposito, E. Enabling technologies for green internet of things. IEEE Syst. J. 2015, 11, 983–994. [Google Scholar] [CrossRef]
- STMicroelectronics. Ultra-Low-Power 32-Bit MCU Arm-Based Cortex-M0+, up to 64 KB Flash Memory, 8 KB SRAM, 2 KB EEPROM, USB, ADC, DAC, STM32L052x6 STM32L052x8 Datasheet; STMicroelectronics: Geneva, Switzerland, 2014; Available online: https://www.st.com (accessed on 20 June 2020).
- STMicroelectronics. Bluetooth® Low Energy Wireless System-On-Chip; STMicroelectronics: Geneva, Switzerland, 2010; Available online: https://www.Bluetooth.com/specifications (accessed on 20 June 2020).
- La Rosa, R.; Livreri, P.; Dehollain, C.; Costanza, M.; Trigona, C. An energy autonomous and battery-free measurement system for ambient light power with time domain readout. Measurement 2021, 186, 110158. [Google Scholar] [CrossRef]
- Neri, I.; Travasso, F.; Mincigrucci, R.; Vocca, H.; Orfei, F.; Gammaitoni, L. A real vibration database for kinetic energy harvesting application. J. Intell. Mater. Syst. Struct. 2012, 23, 2095. [Google Scholar] [CrossRef]
- Tsuchiya, T.; Ikeda, T.; Tsunematsu, A.; Sugano, K.; Tabata, O. Tensile testing of single-crystal silicon thin films at 600 C using infrared radiation heating. Sens. Mater. 2010, 22, 1–11. [Google Scholar]
- Shirvanimoghaddam, M.; Shirvanimoghaddam, K.; Abolhasani, M.M.; Farhangi, M.; Barsari, V.Z.; Liu, H.; Dohler, M.; Naebe, M. Towards a green and self-powered Internet of Things using piezoelectric energy harvesting. IEEE Access 2019, 7, 94533–94556. [Google Scholar] [CrossRef]
- Bowen, C.; Kim, H.; Weaver, P.; Dunn, S. Piezoelectric and ferroelectric materials and structures for energy harvesting applications. Energy Environ. Sci. 2014, 7, 25–44. [Google Scholar] [CrossRef] [Green Version]
- Zabek, D.; Pullins, R.; Pearson, M.; Grzebielec, A.; Skoczkowski, T. Piezoelectric-silicone structure for vibration energy harvesting: Experimental testing and modelling. Smart Mater. Struct. 2021, 30, 035002. [Google Scholar] [CrossRef]
- Middelhoek, S.; French, P.; Huijsing, J.; Lian, W. Sensors with digital or frequency output. Sens. Actuators 1988, 15, 119–133. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
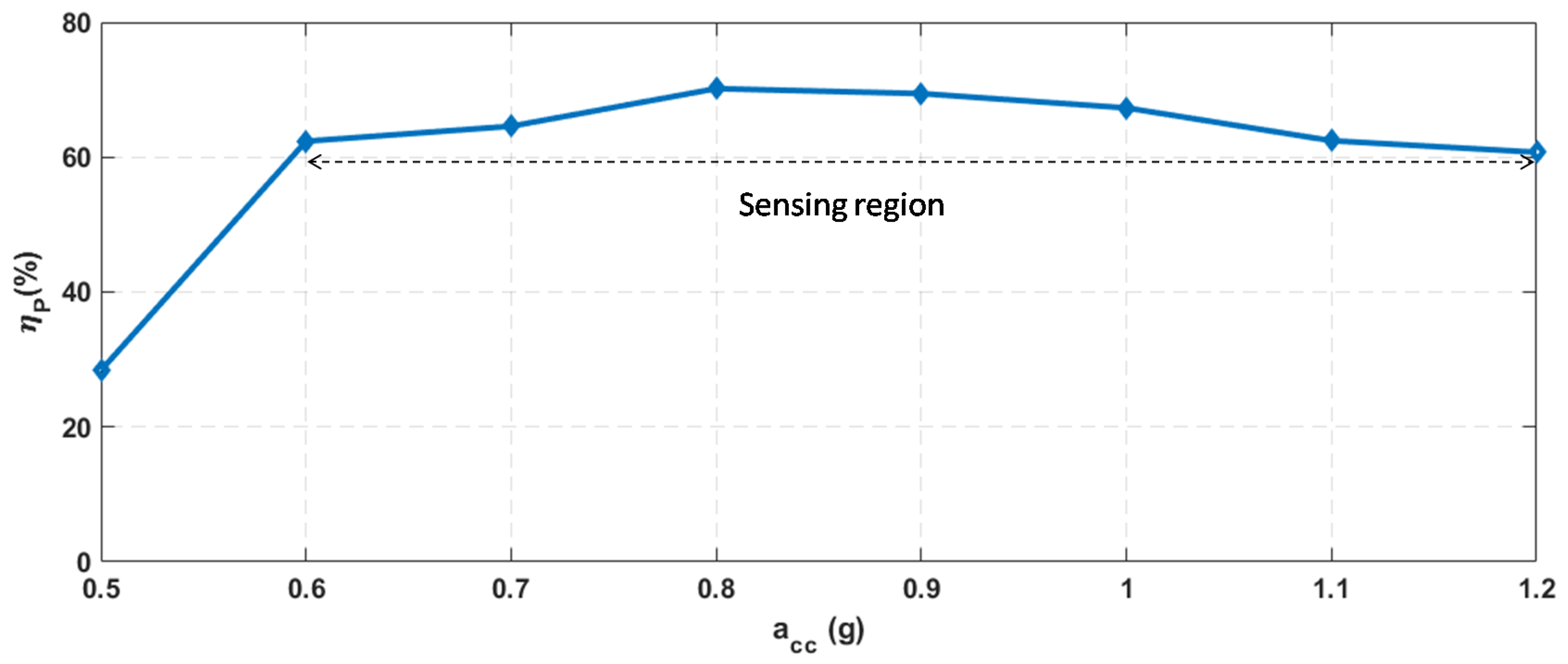
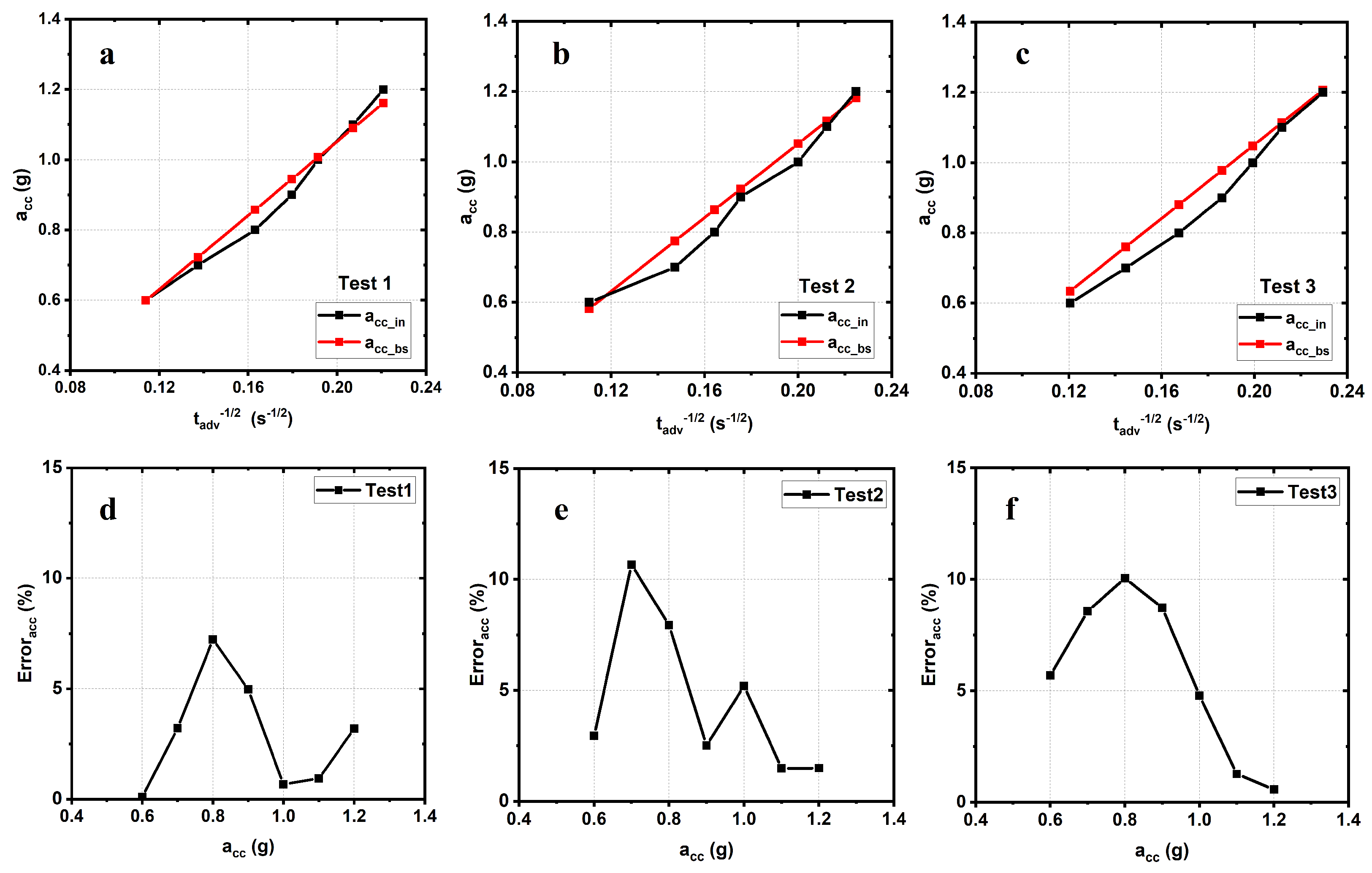
| Range (g) | Fitting Equation | Max (%) | ||
|---|---|---|---|---|
| Test 1 | Test 2 | Test 3 | ||
| [0.6–0.9] | 3.9 | 7.3 | 6.7 | |
| [0.9–1.2] | 6.5 | 6.8 | 5.4 | |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Panayanthatta, N.; Clementi, G.; Ouhabaz, M.; Costanza, M.; Margueron, S.; Bartasyte, A.; Basrour, S.; Bano, E.; Montes, L.; Dehollain, C.; et al. A Self-Powered and Battery-Free Vibrational Energy to Time Converter for Wireless Vibration Monitoring. Sensors 2021, 21, 7503. https://doi.org/10.3390/s21227503
Panayanthatta N, Clementi G, Ouhabaz M, Costanza M, Margueron S, Bartasyte A, Basrour S, Bano E, Montes L, Dehollain C, et al. A Self-Powered and Battery-Free Vibrational Energy to Time Converter for Wireless Vibration Monitoring. Sensors. 2021; 21(22):7503. https://doi.org/10.3390/s21227503
Chicago/Turabian StylePanayanthatta, Namanu, Giacomo Clementi, Merieme Ouhabaz, Mario Costanza, Samuel Margueron, Ausrine Bartasyte, Skandar Basrour, Edwige Bano, Laurent Montes, Catherine Dehollain, and et al. 2021. "A Self-Powered and Battery-Free Vibrational Energy to Time Converter for Wireless Vibration Monitoring" Sensors 21, no. 22: 7503. https://doi.org/10.3390/s21227503
APA StylePanayanthatta, N., Clementi, G., Ouhabaz, M., Costanza, M., Margueron, S., Bartasyte, A., Basrour, S., Bano, E., Montes, L., Dehollain, C., & La Rosa, R. (2021). A Self-Powered and Battery-Free Vibrational Energy to Time Converter for Wireless Vibration Monitoring. Sensors, 21(22), 7503. https://doi.org/10.3390/s21227503