
A Tuning Fork Frequency Up-Conversion Energy Harvester



Abstract
:1. Introduction
2. Design and Working Principle
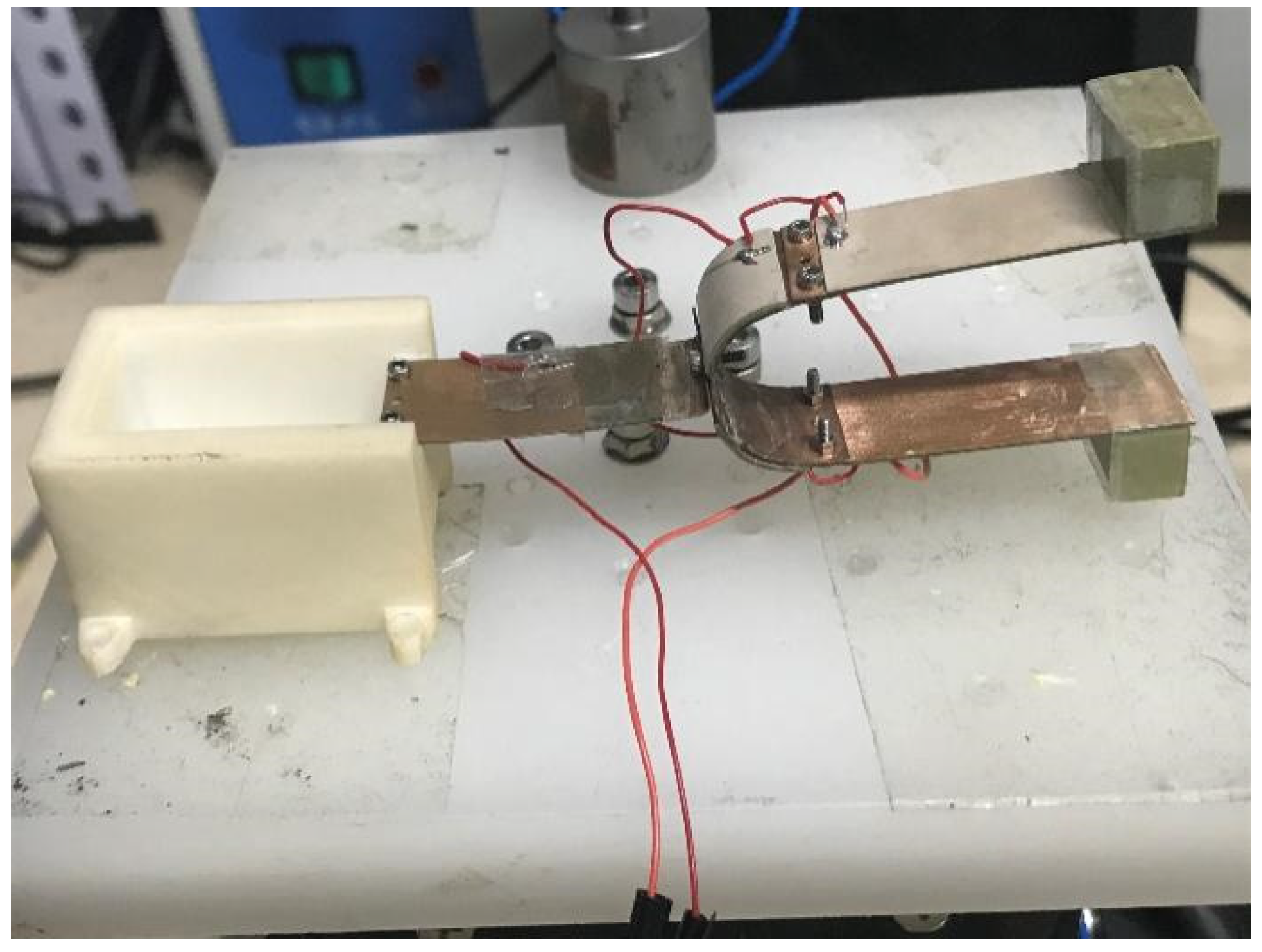
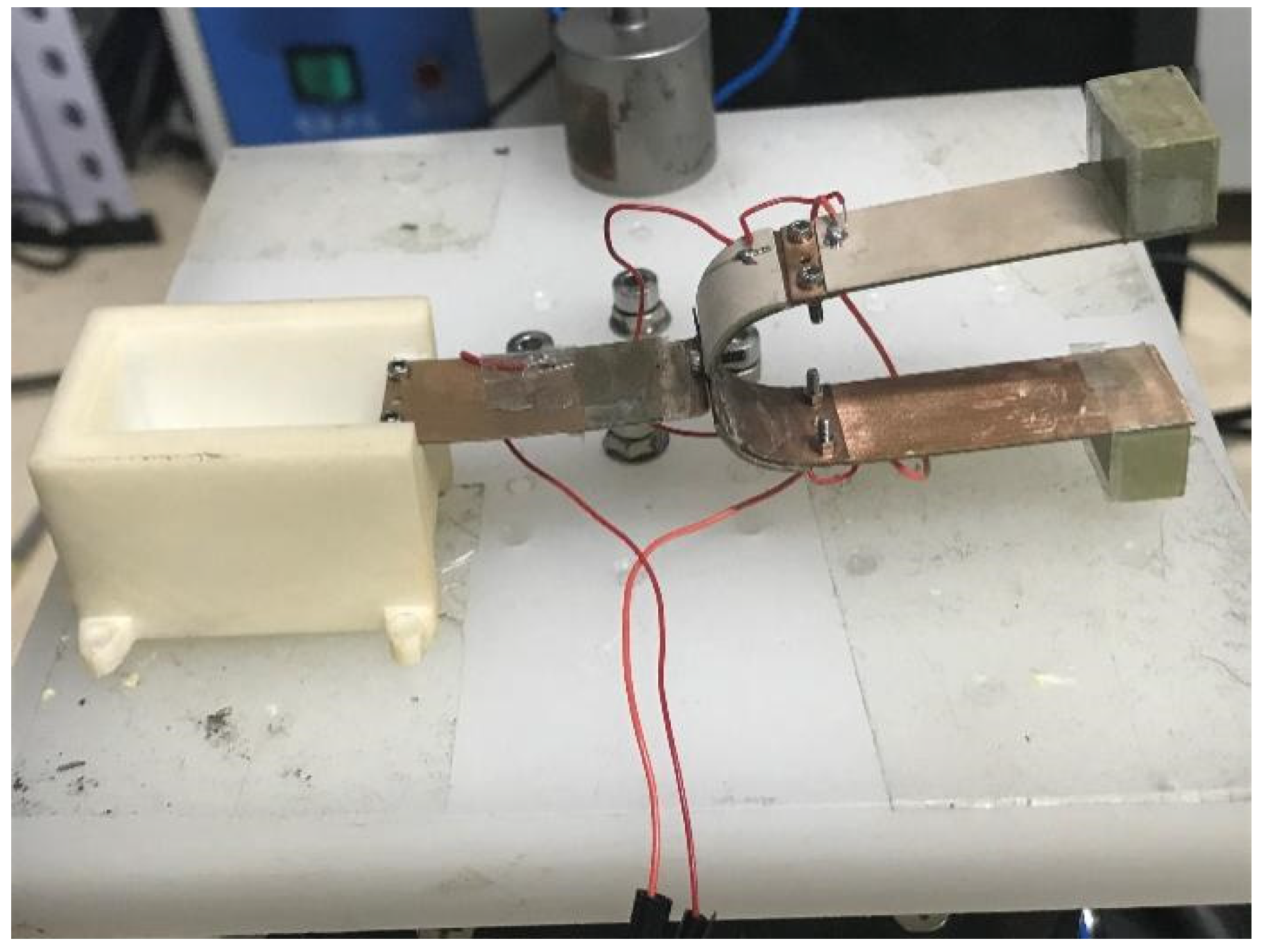
2.1. The Structure Design
2.2. Working Principle
2.3. Electromechanical Coupling Dynamics Model
2.3.1. The Non-Contact Status
2.3.2. The High-Frequency Impact Status
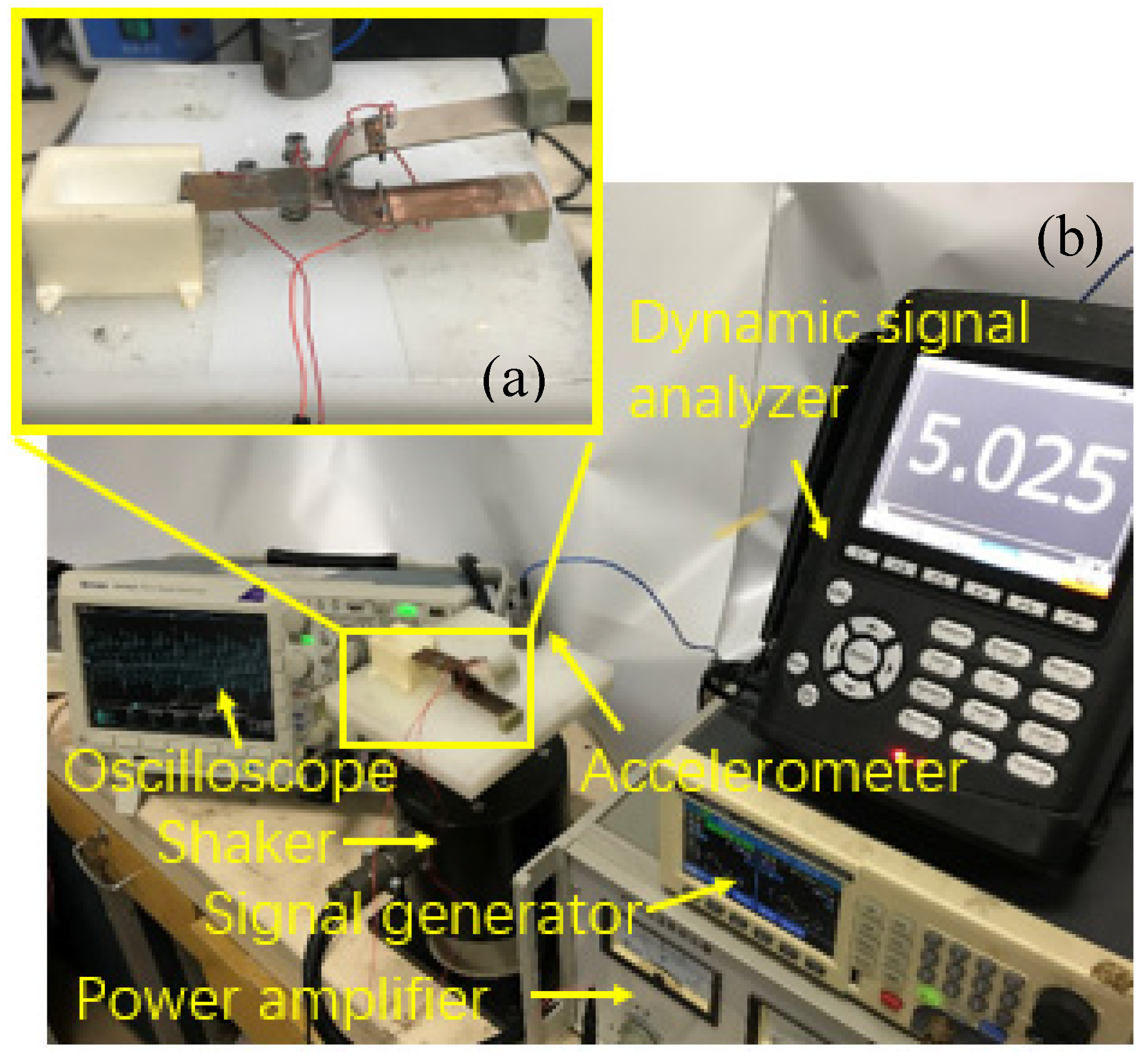
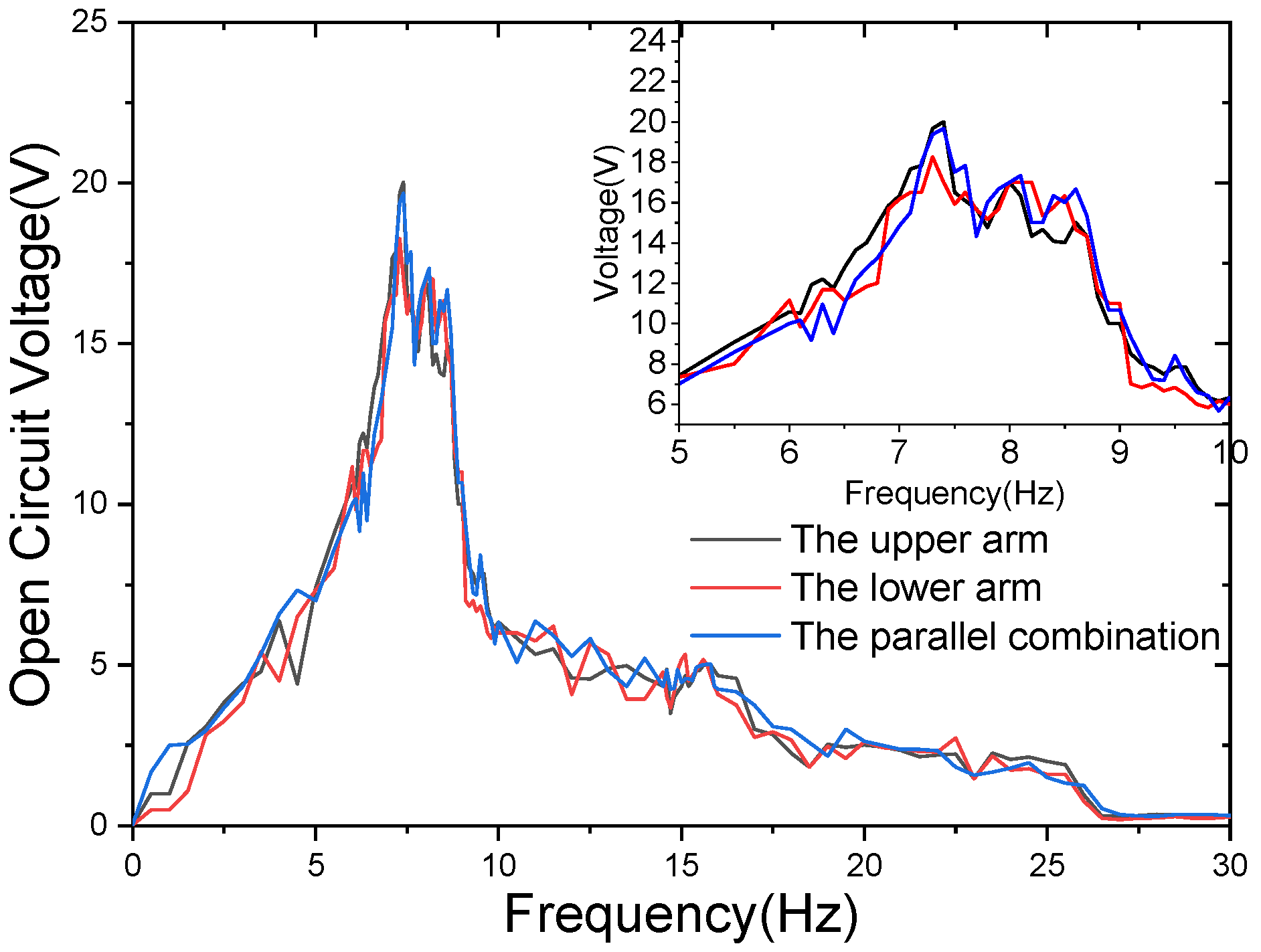
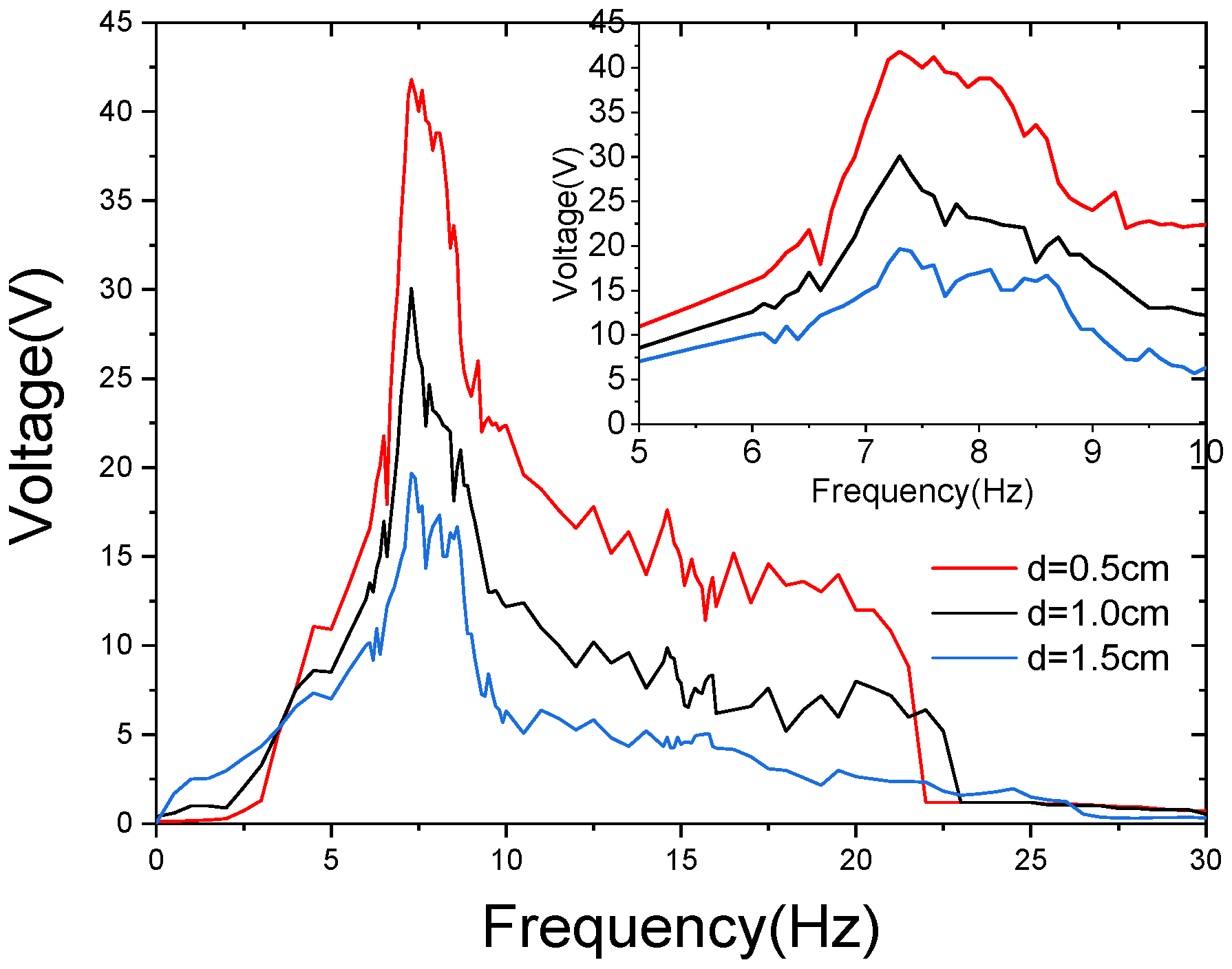
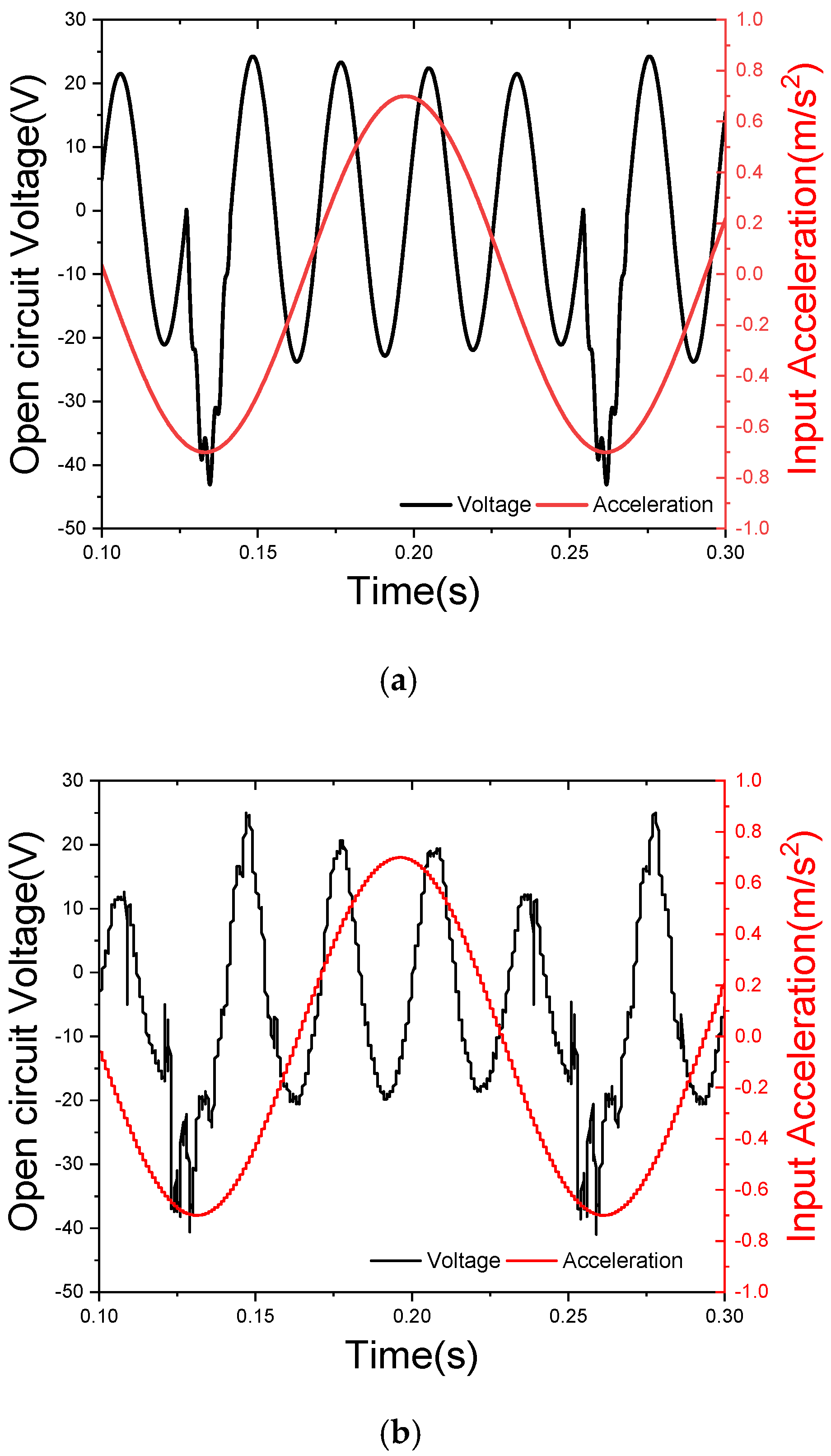
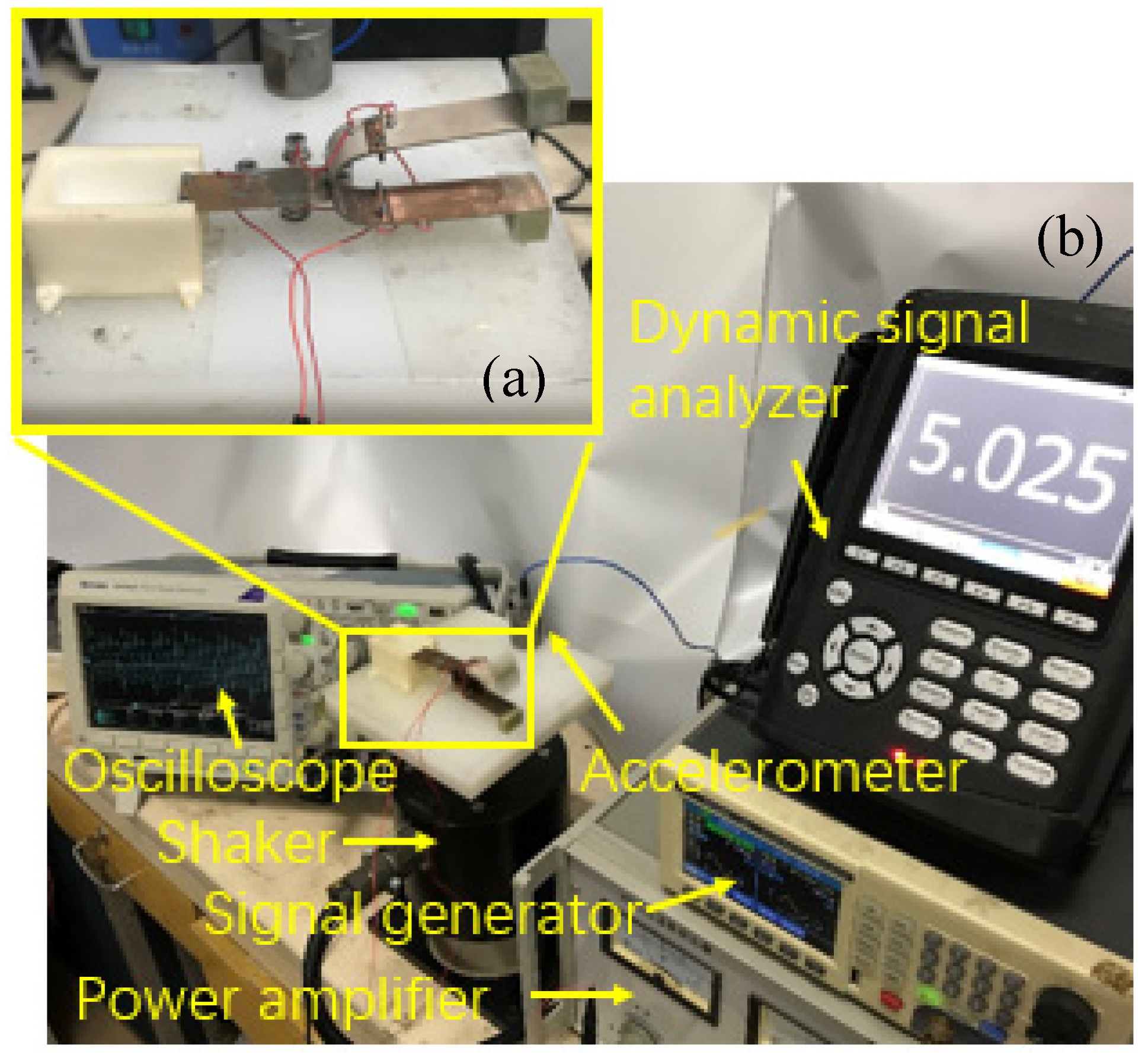
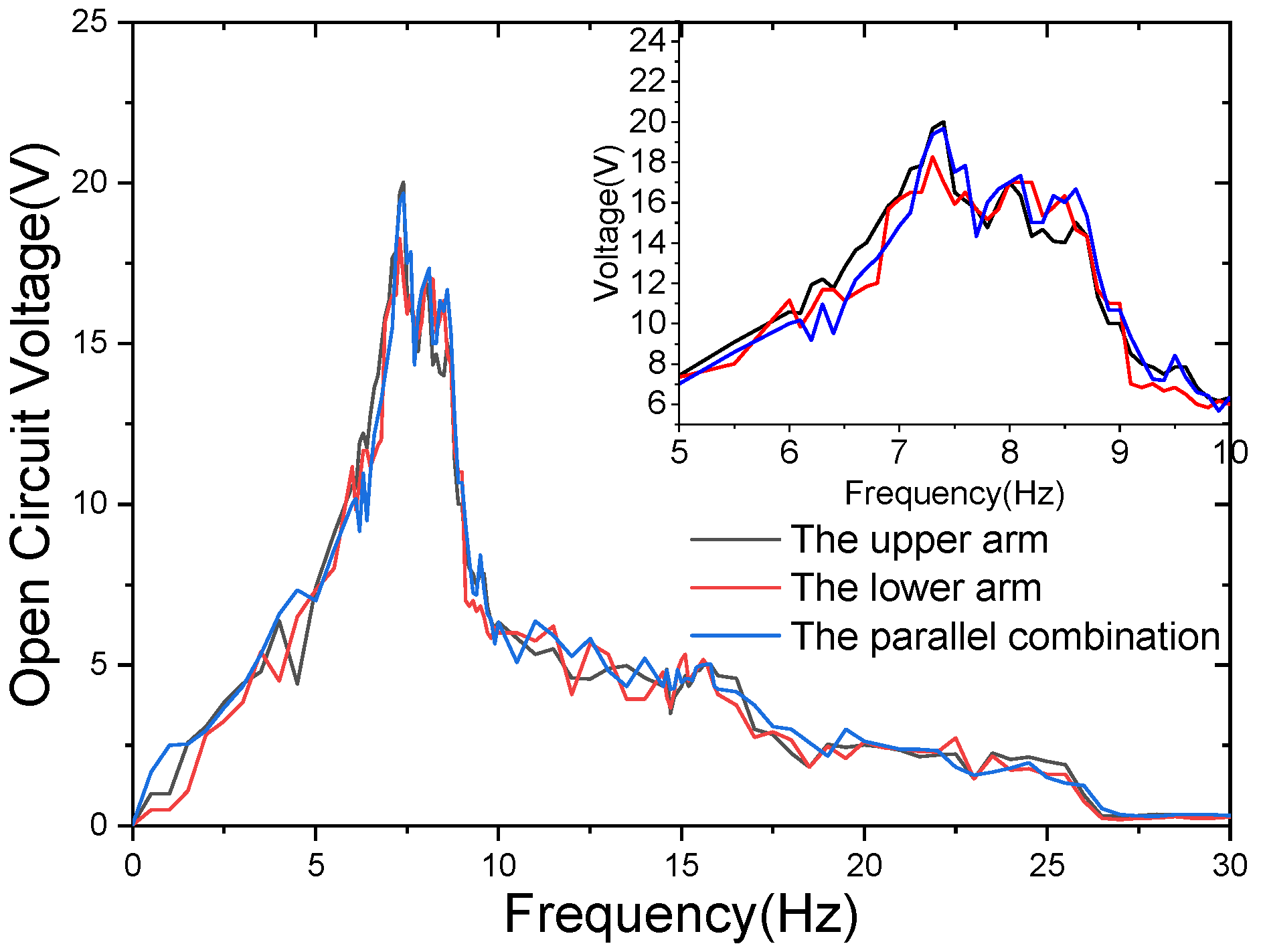
3. Calculations and Experiment
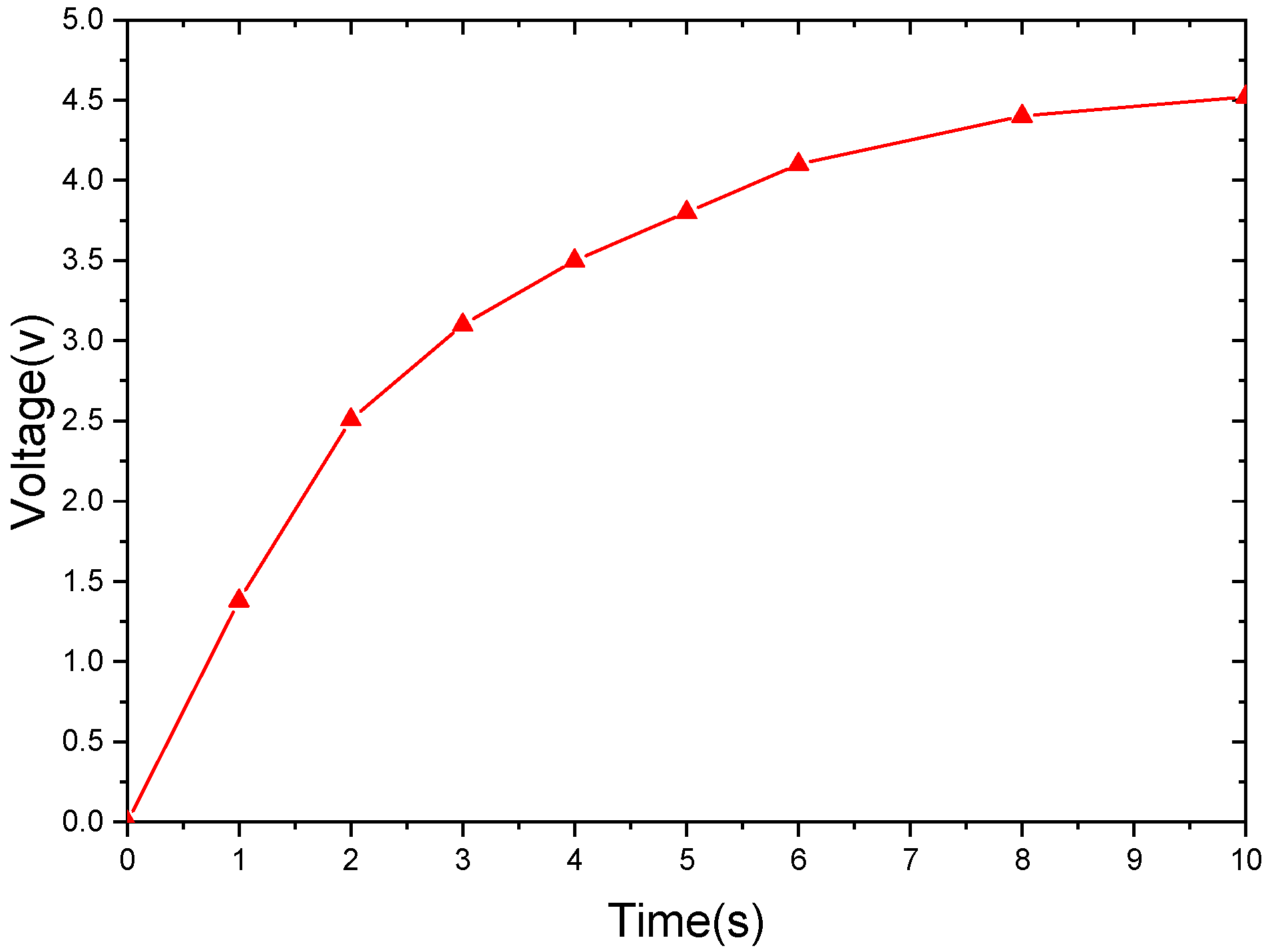
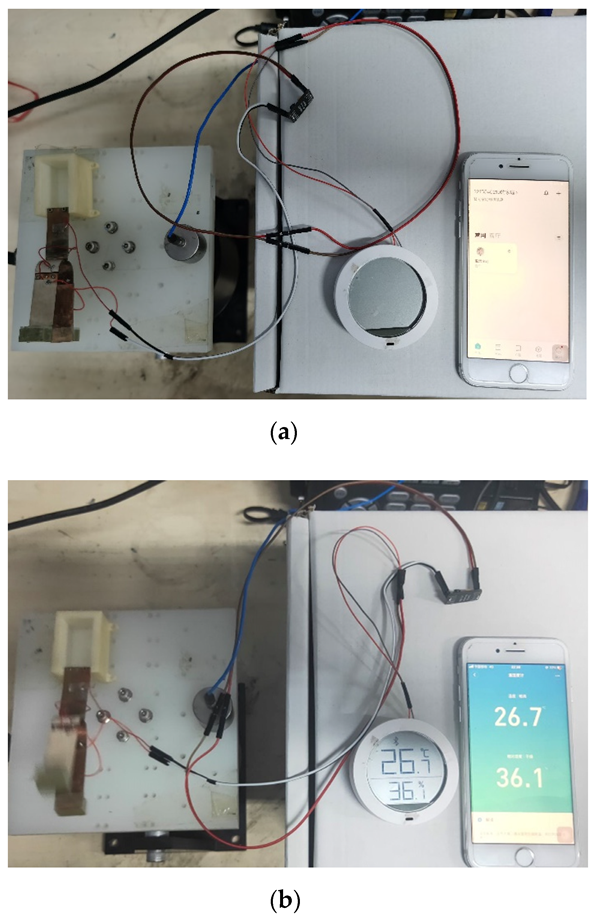
4. Power Supply Experiment for Electrical Appliances
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Liu, F.-R.; Zhang, W.-M.; Zhao, L.-C.; Zou, H.-X.; Tan, T.; Peng, Z.-K.; Meng, G. Performance enhancement of wind energy harvester utilizing wake flow induced by double upstream flat-plates. Appl. Energy 2019, 257, 114034. [Google Scholar] [CrossRef]
- Chen, J.; Guo, H.; Wu, Z.; Xu, G.; Zi, Y.; Hu, C.; Wang, Z.L. Actuation and sensor integrated self-powered cantilever system based on TENG technology. Nano Energy 2019, 64, 103920. [Google Scholar] [CrossRef]
- Chen, X.; Guo, H.; Wu, H.; Chen, H.; Song, Y.; Su, Z.; Zhang, H. Hybrid generator based on freestanding magnet as all-direction in-plane energy harvester and vibration sensor. Nano Energy 2018, 49, 51–58. [Google Scholar] [CrossRef]
- Naseer, R.; Dai, H.L.; Abdelkefi, A.; Wang, L. Piezomagnetoelastic energy harvesting from vortex-induced vibrations using monostable characteristics. Appl. Energy 2017, 203, 142–153. [Google Scholar] [CrossRef]
- Wu, Z.; Tang, J.; Zhang, X.; Yu, Z. An energy harvesting bracelet. Appl. Phys. Lett. 2017, 111, 013903. [Google Scholar] [CrossRef]
- Cho, J.Y.; Kim, J.; Kim, K.-B.; Ryu, C.H.; Hwang, W.; Lee, T.H.; Sung, T.H. Significant power enhancement method of magneto-piezoelectric energy harvester through directional optimization of magnetization for autonomous IIoT platform. Appl. Energy 2019, 254, 113710. [Google Scholar] [CrossRef]
- Nie, X.; Tan, T.; Yan, Z.; Yan, Z.; Zhang, W. Ultra-wideband piezoelectric energy harvester based on Stockbridge damper and its application in smart grid. Appl. Energy 2020, 267, 114898. [Google Scholar] [CrossRef]
- Gao, X.; Wu, J.; Yu, Y.; Chu, Z.; Shi, H.; Dong, S. Giant Piezoelectric Coefficients in Relaxor Piezoelectric Ceramic PNN-PZT for Vibration Energy Harvesting. Adv. Funct. Mater. 2018, 28, 1706895. [Google Scholar] [CrossRef]
- Chen, J.; Zhu, G.; Yang, W.; Jing, Q.; Bai, P.; Yang, Y.; Hou, T.-C.; Wang, Z.L. Harmonic-Resonator-Based Triboelectric Nanogenerator as a Sustainable Power Source and a Self-Powered Active Vibration Sensor. Adv. Mater. 2013, 25, 6094–6099. [Google Scholar] [CrossRef]
- Gao, X.; Qiu, C.; Li, G.; Ma, M.; Yang, S.; Xu, Z.; Li, F. High output power density of a shear-mode piezoelectric energy harvester based on Pb(In1/2Nb1/2)O3-Pb(Mg1/3Nb2/3)O3-PbTiO3 single crystals. Appl. Energy 2020, 271, 115193. [Google Scholar] [CrossRef]
- Febbo, M.; Machado, S.P.; Gatti, C.D.; Ramirez, J.M. An out-of-plane rotational energy harvesting system for low frequency environments. Energy Convers. Manag. 2017, 152, 166–175. [Google Scholar] [CrossRef]
- Tang, G.; Yang, B.; Liu, J.-Q.; Xu, B.; Zhu, H.-Y.; Yang, C.-S. Development of high performance piezoelectric d33 mode MEMS vibration energy harvester based on PMN-PT single crystal thick film. Sensors Actuators A Phys. 2014, 205, 150–155. [Google Scholar] [CrossRef]
- Sardini, E.; Serpelloni, M. An efficient electromagnetic power harvesting device for low-frequency applications. Sensors Actuators A Phys. 2011, 172, 475–482. [Google Scholar] [CrossRef]
- Zhang, X.; Zhang, Z.; Pan, H.; Salman, W.; Yuan, Y.; Liu, Y. A portable high-efficiency electromagnetic energy harvesting system using supercapacitors for renewable energy applications in railroads. Energy Convers. Manag. 2016, 118, 287–294. [Google Scholar] [CrossRef]
- Halim, M.A.; Cho, H.; Salauddin, M.; Park, J.Y. A miniaturized electromagnetic vibration energy harvester using flux-guided magnet stacks for hu-man-body-induced motion. Sens. Actuators A 2016, 249, 23–31. [Google Scholar] [CrossRef]
- Lin, Z.; Chen, J.; Li, X.; Li, J.; Awais, Q.; Yang, J. Broadband and three-dimensional vibration energy harvesting by a non-linear magnetoelectric generator. Appl. Phys. Lett. 2016, 109, 253903. [Google Scholar] [CrossRef]
- Jafari, H.; Ghodsi, A.; Azizi, S.; Ghazavi, M.R. Energy harvesting based on magnetostriction, for low frequency excitations. Energy 2017, 124, 1–8. [Google Scholar] [CrossRef]
- Pondrom, P.; Sessler, G.M.; Bös, J.; Melz, T. Compact electret energy harvester with high power output. Appl. Phys. Lett. 2016, 109, 053906. [Google Scholar] [CrossRef]
- Zhang, Y.; Wang, T.; Luo, A.; Hu, Y.; Li, X.; Wang, F. Micro electrostatic energy harvester with both broad bandwidth and high normalized power density. Appl. Energy 2018, 212, 362–371. [Google Scholar] [CrossRef]
- Basset, P.; Galayko, D.; Cottone, F.; Guillemet, R.; Blokhina, E.; Marty, F.; Bourouina, T. Electrostatic vibration energy harvester with combined effect of electrical nonlinearities and mechanical impact. J. Micromechanics Microengineering 2014, 24, 35001. [Google Scholar] [CrossRef]
- Cheng, T.; Li, Y.; Wang, Y.; Gao, Q.; Ma, T.; Wang, Z. Triboelectric nanogenerator by integrating a cam and a movable frame for ambient mechanical energy harvesting. Nano Energy 2019, 60, 137–143. [Google Scholar] [CrossRef]
- Li, S.; Zhong, Q.; Zhong, J.; Cheng, X.; Wang, B.; Hu, B.; Zhou, J. Cloth-Based Power Shirt for Wearable Energy Harvesting and Clothes Ornamentation. ACS Appl. Mater. Interfaces 2015, 7, 14912–14916. [Google Scholar] [CrossRef]
- Zhang, S.L.; Xu, M.; Zhang, C.; Wang, Y.-C.; Zou, H.; He, X.; Wang, Z.; Wang, Z.L. Rationally designed sea snake structure based triboelectric nanogenerators for effectively and efficiently harvesting ocean wave energy with minimized water screening effect. Nano Energy 2018, 48, 421–429. [Google Scholar] [CrossRef]
- Seol, M.-L.; Han, J.-W.; Park, S.-J.; Jeon, S.-B.; Choi, Y.-K. Hybrid energy harvester with simultaneous triboelectric and electromagnetic generation from an embedded floating oscillator in a single package. Nano Energy 2016, 23, 50–59. [Google Scholar] [CrossRef]
- Ju, S.; Chae, S.H.; Choi, Y.; Lee, S.; Lee, H.W.; Ji, C.-H. A low frequency vibration energy harvester using magnetoelectric laminate composite. Smart Mater. Struct. 2013, 22, 115037. [Google Scholar] [CrossRef]
- Sun, Y.; Lu, Y.; Li, X.; Yu, Z.; Zhang, S.; Sun, H.; Cheng, Z. Flexible hybrid piezo/triboelectric energy harvester with high power density workable at ele-vated temperatures. J. Mater. Chem. A 2020, 8, 12003–12012. [Google Scholar] [CrossRef]
- Sodano, H.A.; Inman, D.J.; Park, G. A Review of Power Harvesting from Vibration Using Piezoelectric Materials. Shock. Vib. Dig. 2004, 36, 197–205. [Google Scholar] [CrossRef] [Green Version]
- Arrieta, A.F.; Hagedorn, P.; Erturk, A.; Inman, D.J. A piezoelectric bistable plate for nonlinear broadband energy harvesting. Appl. Phys. Lett. 2010, 97, 104102. [Google Scholar] [CrossRef] [Green Version]
- Wu, Y.; Qiu, J.; Zhou, S.; Ji, H.; Chen, Y.; Li, S. A piezoelectric spring pendulum oscillator used for multi-directional and ultra-low frequency vibration energy harvesting. Appl. Energy 2018, 231, 600–614. [Google Scholar] [CrossRef]
- Toyabur, R.; Salauddin, M.; Park, J.-Y. Design and experiment of piezoelectric multimodal energy harvester for low frequency vibration. Ceram. Int. 2017, 43, S675–S681. [Google Scholar] [CrossRef]
- Fan, K.; Liang, G.; Wei, D.; Wang, W.; Zhou, S.; Tang, L. Achieving high-speed rotations with a semiflexible rotor driven by ultralow-frequency vibrations. Appl. Phys. Lett. 2020, 117, 223901. [Google Scholar] [CrossRef]
- Zhou, N.; Zhang, Y.; Bowen, C.R.; Cao, J. A stacked electromagnetic energy harvester with frequency up-conversion for swing motion. Appl. Phys. Lett. 2020, 117, 163904. [Google Scholar] [CrossRef]
- Jung, S.-M.; Yun, K.-S. Energy-harvesting device with mechanical frequency-up conversion mechanism for increased power efficiency and wideband operation. Appl. Phys. Lett. 2010, 96, 111906. [Google Scholar] [CrossRef]
- Pillatsch, P.; Yeatman, E.M.; Holmes, A.S. A piezoelectric frequency up-converting energy harvester with rotating proof mass for human body appli-cations. Sens. Actuators A 2014, 206, 178–185. [Google Scholar] [CrossRef]
- Fu, H.; Yeatman, E.M. A methodology for low-speed broadband rotational energy harvesting using piezoelectric transduction and frequency up-conversion. Energy 2017, 125, 152–161. [Google Scholar] [CrossRef] [Green Version]
- Zhang, J.; Qin, L. A tunable frequency up-conversion wideband piezoelectric vibration energy harvester for low-frequency variable environment using a novel impact- and rope-driven hybrid mechanism. Appl. Energy 2019, 240, 26–34. [Google Scholar] [CrossRef]
- Umeda, M.; Nakamura, K.; Ueha, S. Analysis of the Transformation of Mechanical Impact Energy to Electric Energy Using Piezoelectric Vibrator. Jpn. J. Appl. Phys. 1996, 35, 3267–3273. [Google Scholar] [CrossRef]
- Umeda, M.; Nakamura, K.; Ueha, S. Energy Storage Characteristics of a Piezo-Generator using Impact Induced Vibration. Jpn. J. Appl. Phys. 1997, 36, 3146–3151. [Google Scholar] [CrossRef]
- Kathpalia, B.; Tan, D.; Stern, I.; Erturk, A. An experimentally validated model for geometrically nonlinear plucking-based frequency up-conversion in energy harvesting. Smart Mater. Struct. 2017, 27, 015024. [Google Scholar] [CrossRef] [Green Version]
- Lo, Y.C.; Chen, C.C.; Shu, Y.C.; Lumentut, M.F. Broadband piezoelectric energy harvesting induced by mixed resonant modes under magnetic plucking. Smart Mater. Struct. 2021, 30, 105026. [Google Scholar] [CrossRef]
- Fang, S.; Fu, X.; Liao, W.-H. Modeling and experimental validation on the interference of mechanical plucking energy harvesting. Mech. Syst. Signal Process. 2019, 134, 106317. [Google Scholar] [CrossRef]
- Halim, M.A.; Park, J.Y. Theoretical modeling and analysis of mechanical impact driven and frequency up-converted piezoelectric energy harvester for low-frequency and wide-bandwidth operation. Sens. Actuators A 2014, 208, 56–65. [Google Scholar] [CrossRef]
- Tang, Q.C.; Yang, Y.L.; Li, X. Bi-stable frequency up-conversion piezoelectric energy harvester driven by non-contact magnetic repulsion. Smart Mater. Struct. 2011, 20, 125011. [Google Scholar] [CrossRef]
- Deng, W.; Wang, Y. Non-contact magnetically coupled rectilinear-rotary oscillations to exploit low-frequency broadband energy harvesting with frequency up-conversion. Appl. Phys. Lett. 2016, 109, 133903. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value |
|---|---|
| Transverse piezoelectric constant (d31) | −273 pm/V |
| Young’s modulus of stainless steel (Ys) | 130 GPa |
| Young’s modulus of PZT unimorph (Yp) | 56 GPa |
| Dielectric constant of PZT unimorph (ε33) | 1.389 × 10−8 F/m |
| Damping ratio of system (ζ) | 0.02 |
| Quality of proof mass1 (m) | 10 g |
| Size of the handle (lh*bh*hh) | 50 mm × 15 mm × 0.2 mm |
| Size of the straight part (ls*bs) | 40 mm × 16 mm |
| Radius of the arc (R) Thickness of base beam (hb) | 10 mm 0.2 mm |
| Size of PZT unimorph (lp*bp*hp) | 20 mm × 16 mm × 0.3 mm |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wu, Q.; Gao, S.; Jin, L.; Zhang, X.; Yin, Z.; Wang, C. A Tuning Fork Frequency Up-Conversion Energy Harvester. Sensors 2021, 21, 7285. https://doi.org/10.3390/s21217285
Wu Q, Gao S, Jin L, Zhang X, Yin Z, Wang C. A Tuning Fork Frequency Up-Conversion Energy Harvester. Sensors. 2021; 21(21):7285. https://doi.org/10.3390/s21217285
Chicago/Turabian StyleWu, Qinghe, Shiqiao Gao, Lei Jin, Xiyang Zhang, Zuozong Yin, and Caifeng Wang. 2021. "A Tuning Fork Frequency Up-Conversion Energy Harvester" Sensors 21, no. 21: 7285. https://doi.org/10.3390/s21217285
APA StyleWu, Q., Gao, S., Jin, L., Zhang, X., Yin, Z., & Wang, C. (2021). A Tuning Fork Frequency Up-Conversion Energy Harvester. Sensors, 21(21), 7285. https://doi.org/10.3390/s21217285