1. Introduction
Quality control is a key problem in industry. Surface defect detection plays an important role in quality control tasks. Many industry companies pay much attention to developing surface detection technology, and spend much effort and money on this endeavour.
In practice, the task of surface defect detection is mostly conducted manually by workers. Since worker energy is limited and the task is boring, after a long, continuous work-time, defect detection decreases. To deal with this problem, it is necessary to perform surface defect detection tasks automatically so as to enhance detection efficiency.
With the rapid development of AI technology, automatic surface defect detection has become a promising area in recent years. The current methods can be mainly divided into two categories. One is based on traditional methods, while the other is based on machine learning methods.
1.1. Current Methods
1.1.1. The Traditional Detection Approaches
Most early studies on surface defect detection use artificial design features to achieve good results [
1,
2,
3]. These methods heavily depend on professional domain knowledge, and are subject to specific conditions.
The traditional approach uses hand-crafted features to detect defects. There are four kinds of approaches, i.e, spectral-based, statistical-based, threshold-based, and model-based methods [
4]. For example, the spectral-based method used in defect detection tasks involves Fourier transform [
5], Gabor filters [
6], and Wavelet transform [
7,
8].
Although the traditional methods have achieved good performance in surface defect detection, they are very sensitive to illumination and background. The use of traditional image processing methods to solve the problem of surface defects relies on images with uniform illumination and obvious surface defects. However, in the actual complex industrial environment, there are situations such as small differences between defect imaging and background, low contrast, large variation of defect scale and various types, or a large amount of noise in the defect image. These issues make the methods difficult to deploy. To solve these problems, machine learning methods are employed to detect surface defects.
1.1.2. Detection Approaches Based on Machine Learning
- A.
Shallow Learning
Shallow learning was a popular method to detect surface defects in the past decades. These methods mainly include Bayesian algorithm [
9], KNN [
10], NNs [
11], SVM [
12], and so on. Ref. [
13] utilizes Bayesian network to classify steel surfaces. Ref. [
14] uses k-nearest neighbor algorithm to inspect rail surfaces. Ref. [
15] utilizes a small set of wavelet features and employs support vector machine methods for defect detection. However, shallow learning lacks the ability to represent the complex function and make it restricitive of generalization ability for hard classification problems. Otherwise, shallow learning methods rely more on human expertise, i.e., SVM suffers from artificial feature extraction, KNN depends on choosing a good category number to classify.
Shallow learning methods still cannot achieve satisfied detection accuracy although they are more universal than the traditional methods. These methods, which can be called shallow methods compared with the deep learning method, are more stable and less dependent on human knowledge. These shallow methods achieve appreciated results in the defect detection domain. Now that the computation power has greatly improved, large neural networks have been introduced into the defect detection problem and the results, so far, have proved to be satisfactory.
- B.
Deep Learning
As the big data era began, especially since the AlexNet won the first prize of ILSVRC 2012 [
16], deep learning has become a brilliant sub-domain.
Many convolutional neural networks (CNNs) are employed to surface defect detection, such as AlexNet [
16], VGG [
17], GoogLeNet [
18], ResNet [
19], DenseNet [
20], and MobileNet [
21].
The previous classification networks can only classify the defect without pointing out the region and coordinates of defect. Fast R-CNN [
22] and Faster R-CNN [
23] are employed to defect detection. Ref. [
24] introduces a refined Fast R-CNN model and make a test on a defect dataset NEU-DET. Fast R-CNN and its variants achieve good results in practice, but they are slow.
SSD (Single Shot MultiBox Detector) [
25] and YOLO (You Only Look Once) [
26] are applied to handle the problem. Without requiring the region proposal stage, these methods directly generate the category probability and the position coordinate of the object, which improves the detecting speed. Ref. [
27] utilizes the SSD network as the meta structure and combine it with base MobileNet for surface defect detection. Ref. [
28] introduces YOLOv3 to detect multiple concrete bridge damages. Batch normalization and focal loss are incorporated in the model.
Deep learning methods have made great progress in surface defect detection. There are successful applications, especially for plane surface, such as steel plane [
29], fabric plane [
30], and glass plane [
31]. There are also successful applications on surface defect detection in non-planar objects. Ref. [
32] employes a defect detection algorithm based on a single short detector network for tiny parts in manufacturing. Ref. [
33] proposes an improved YOLOv3 model named DC-TLMDDNet (Dense Connection Based Track Line Multi-target Defect Detection Network) for multi-target defect identification of the railway track line. Ref. [
34] utilizes SSD and YOLO to build up a three-stage cascaded DCNN for detecting catenary support device defects. However, rare investigations have been done on copper elbow surface defect detection.
1.2. Objective and Structure
Copper elbows are used to link pipelines and change their direction. Copper elbows are often used for gas and oil pipeline connections. Poor quality of copper elbow can lead to severe accidents, such as natural gas leakage, fire, explosion, and so on. Therefore, the quality of copper elbow matters a great deal. It’s important to detect the defect of copper elbow accurately.
In this paper, a new defect detection model, named YOT-Net (YOLOv3 combined with triplet loss network) is proposed to deal with the copper elbow defect detection problem. The innovation of YOT-Net lies in the following aspects. Firstly, the triplet loss is introduced into the loss module of YOT-Net. To enhance feature extraction ability, the triplet loss is used as a regulation term to maximize the image similarity within the same category. Secondly, transfer learning is employed in YOT-NET, which provides a better initialization for the network. These modifications make the proposed model converge more quickly. The performance is higher than the original YOLOv3.
The remainder of this paper is organized as follows. The proposed method is discussed in detail in
Section 2 . Then, experiments are presented in
Section 3. Finally,
Section 4 is the conclusion.
2. The Methodology of YOT-Net
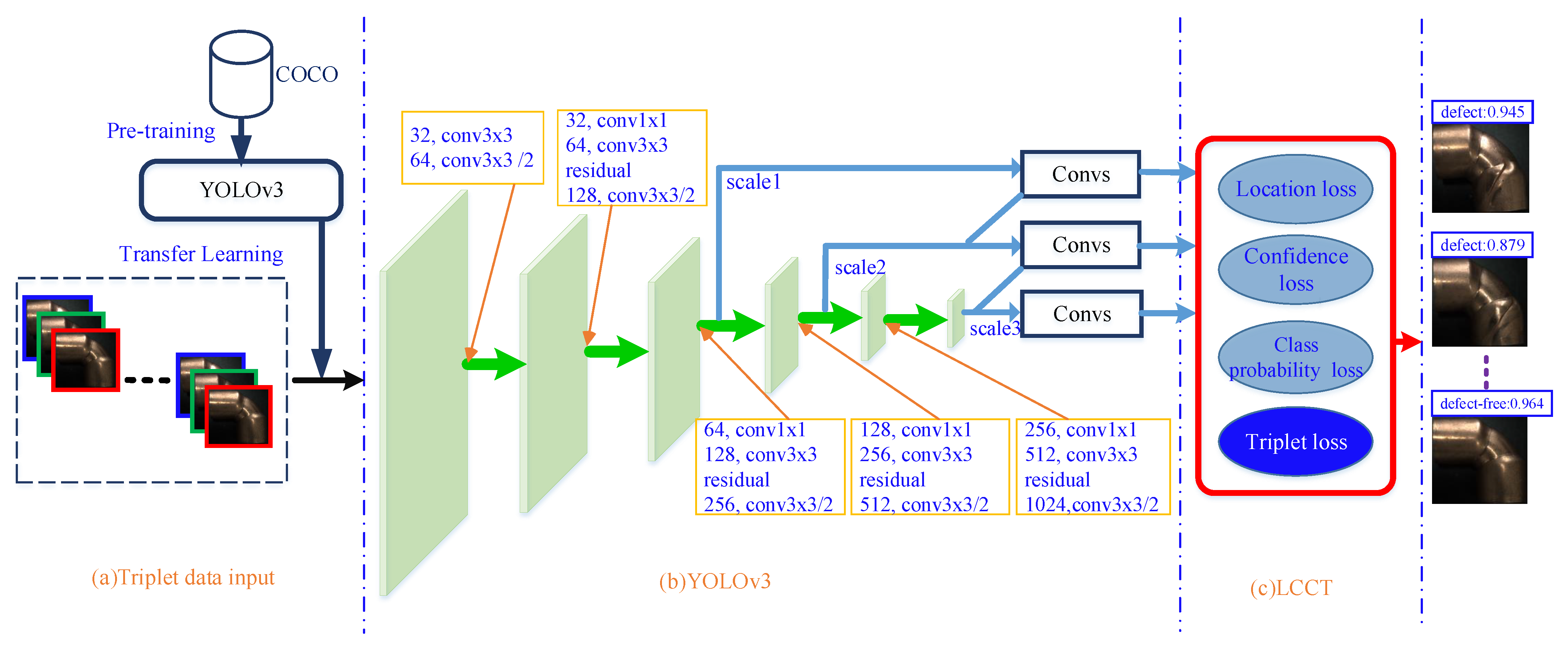
Our objective was to inspect whether the copper elbow is qualified to be a product on-line. As a result, not only the detection accuracy but also the detection speed should be satisfiable. YOLOv3 is fast and accurate for target detection. Triplet loss [
35] is a method to enhance feature extraction ability. A new defect detection model, named YOT-Net is proposed. YOT-Net consists of three major components, i.e., Triplet data input module, YOLOv3 module, and LCCT (Location-Confidence-Class probability-Triplet) loss module, as shown in
Figure 1.
First of all, the raw images are separated into triplets. A triplet contains a base, which is either positive or negative. The input is a batch size of triplet raw images and the corresponding ground truth to the YOLOv3 network. The COCO (Microsoft Common Objects in Context) dataset [
36] was used to pretrain and initialize the YOLOv3 model.
Next, image features were extracted through backbone, multiple convolutional operations, and three feature maps are outputed.
Finally, a novel loss module, named LCCT (Location-Confidence-Class probability-Triplet) loss module was constructed. The triplet loss function was applied to the loss layer as a regulation term to learn the similarity among triplet images. The loss layer was composed of location loss block, confidence loss block, class loss block, and triplet loss block. LCCT loss makes the model converge more quickly and accurately.
2.1. Basics of YOLOv3
Each input image was divided into
grids with the same size of the feature map. The grid in which the center of an object was located was selected to perform the prediction. Each grid predicted three bounding boxes.The output format of each grid is shown in
Figure 2. The first four letters depict the location of the predicted bounding box.
The cener coordinates are
, and
are the width and height. While
denotes the confidence score of the bounding box;
are the probabilities of each class of object. In order to get a better prediction, prior anchor box and bounding regression were introduced to the network, as shown in
Figure 3.
Assume the coordinates of the top left corner of the cell are represented by
and the prior anchor box has width and height
, the bounding box predictions can be updated by the following formulas,
where
are the regression bounding box coordinates, and
indicates the sigmoid function. Meanwhile,
reflects the probability that the bounding box contains the target defect and the likelihood of the bounding box coinciding with the ground truth box (intersection-over-union,
).
indicates the probability of the object appearing in the box. If there is an object in the cell
, otherwise,
.
2.2. Triplet Loss
Triplet loss was first proposed in [
35]. A triplet data group may include three kinds of images, a base sample, a positive sample, and a negative sample. The triplet loss learns to make the distance from the base to the positive sample closer; meanwhile, making the distance to the negative sample farther. Therefore, the triplet loss was employed to improve accuracy, as shown in
Figure 4.
The calculation of triplet loss is,
where
represents the output of YOT-Net;
stand for the base, positive sample, and negative sample;
m refers to a margin that helps triplet loss function not be subjected to a local optimum and makes it more robust.
2.3. Location-Confidence-Class Probability-Triplet (LCCT) Loss Module
Triplet loss is introduced to YOT-Net as a regulation term. The YOT-Net loss function can be rewritten as Equation (
3), including four parts, i.e., location loss, confidence loss, class probability loss, and triplet loss, which constitute the LCCT loss modules.
are computed in a similar way as the original YOLOV3 [
37]. The
was computed by Equation (
2);
is a hyper parameter, usually set to be
. By introducing the
to the LCCT loss module, YOT-Net can converge more quickly and predict more accurately.
Location loss is used to compute the location loss between the predict coordinates with the ground truth. It can be calculated as:
where
is the indicator function;
stand for truth bounding boxes coordinates;
,
B are the number of grids in the input image and the number of bounding boxes generated by each grid, respectively. Meanwhile,
are the predictions. When the
i-th cell of the
j-th bounding box contains an object, the value is one, otherwise it is zero. Different from YOLOv2 [
38], there is no hyper-parameter to increase or decrease the loss for the bounding box coordinate prediction according to the object in, or not in, the box.
The proposed model computes the confidence loss through binary cross entropy loss function as shown below:
where
and
are the indicator functions that determine whether there is an object center in the box;
C and
stand for the ground truth confidence and the predicted confidence, respectively.
The class probability loss is calculated in the same way of confidence loss.
where
c is the class;
and
stand for the truth class probability and predicted class probability in
i-th box, respectively.
3. Experiments and Analysis
3.1. Dataset
First of all, the manufacturers hope to pick out the defect elbows. Furthermore, they also would like to know what is the distribution of each kind of defect, so that the reason causing the defect with the maximum proportion could be analyzed in time.
In order to perform these two tasks, two new surface defect detection datasets, named “TJ-CE-CLS” and “TJ-CE-DET”, are construed in this paper. The TJ-CE-CLS dataset includes 317 images, i.e., 229 samples in the defective class and 88 samples in the defect-free class. The TJ-CE-DET dataset includes 229 images containing of 384 defects, i.e., 131 samples in the extrusion class, 85 samples in the crack class, and 168 samples in the pitted-surface class.
Copper elbow defect images were collected from a copper elbow manufacturer.
Some samples of copper elbow are shown in
Figure 5. The defect images are RGB images, with a scale of 2456 × 2048. There are three major defects on the copper elbow surface, i.e., extrusion, crack, and pitted-surface.
3.2. A View of Results
YOT-Net was implemented on the open source deep learning toolbox TensorFlow [
39]. The model runs on a NVIDIA GTX 1080TI GPU (with 11GB memory) with Ubuntu 18.04 Linux.
Transfer learning was introduced in the training pipeline. The proposed model was pretrained on the COCO dataset and then trained on the TJ-CE-CLS and TJ-CE-DET datasets. YOT-Net was trained with a learning rate of 0.00001, weight decay of 0.9995, and momentum of 0.9. The exponential moving average was applied to the training process, which makes the model more robust. The leaky ReLU function was selected as the activation function.
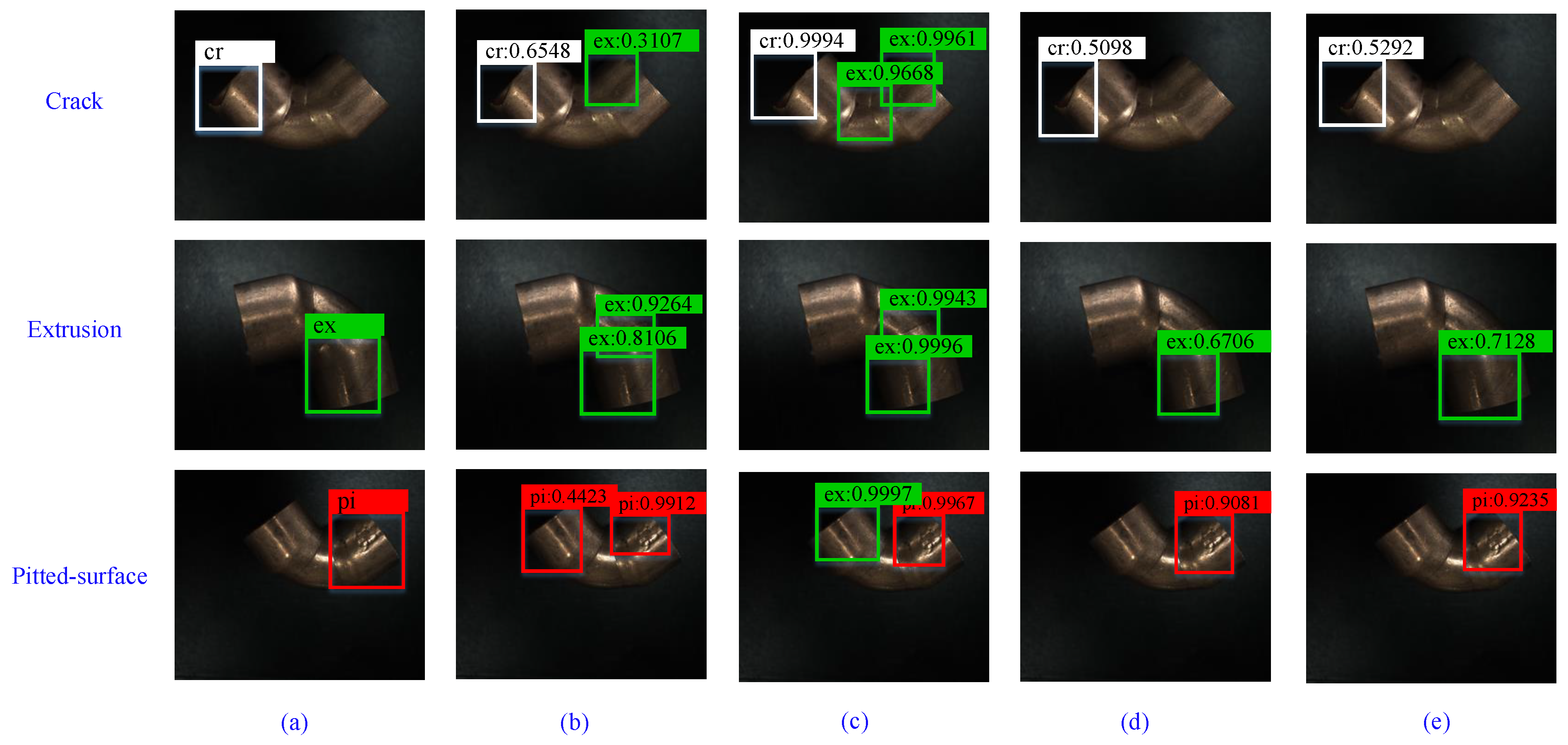
For comparison, SSD, Faster R-CNN, YOLOv3, and YOT-Net were carried out on the same dataset, as shown in
Figure 6, and the detection results are given in columns 2 to 5. The first column are the ground truth defects. It’s clear that SSD and Faster R-CNN got higher scores than YOLOv3 and YOT-Net, but they are more likely to make mistakes. Take the first image of the third column as an example. There is only one crack defect on the image, but Faster R-CNN predicts three defects, one crack defect, and two extrusion defects. This mistake will lead to a high false negative rate, and make more normal copper elbows to be classified into the defect group. YOT-Net shows more robustness.
3.3. Performance Evaluation
3.3.1. Evaluation Metrics
Accuracy, precision, recall, F1 score, false positive rate (FPR), false negative rate (FNR), and mean average precision (mAP) were employed to evaluate the performance of YOT-Net.
3.3.2. Comparisons with the Other Classification Methods
Experiments were conducted on the TJ-CE-CLS dataset to compare the proposed model with some popular classification methods, including Bayesian [
9], KNN [
10], SVM [
12], AlexNet [
16], DenseNet [
20], VGG [
17], ResNeXt [
40], as shown in
Table 1 and
Table 2.
Table 1 shows that YOT-Net outperforms the traditional machine learning methods. The defects of copper elbow in the dataset are quite challenging. For example, extrusion in the defect image is hard to classify for traditional methods and are sensitive to the illumination in the image. In addition, traditional methods feature extraction abilities that are inferior to deep learning methods, especially in the domain of computer vision.
YOT-Net gets better classification, while requiring more computational resources and spending much more time on inferences, as shown in
Table 1. This better performance benefits from the outstanding feature extracting ability of the deep learning method. Therefore, another group of experiments are carried out to compare YOT-Net with other deep learning classification methods.
Experiment results show that the proposed YOT-Net also achieves the best results in accuracy, precision, and F1 score. Firstly, the YOT-Net model is bigger than AlexNet, DenseNet, and ResNeXt, so it possesses more representation ability. The second reason is that the LCCT loss module in the YOT-Net forces the model to extract more useful features. The triplet loss function forces YOT-net to learn to classify the same category image of triplet samples. After that, YOT-Net behaves with the ability to maximize the distance of different categories, which is helpful in the last inference procedure.
Under the concept of FNR and FPR, the lower rate means a better result. The FPR, despite YOT-Net, is 7.41% higher than DenseNet and VGG, the performance of YOT-Net is also acceptable. For FNR, YOT-Net gets at least a 7.4% lower prediction rate than others. FNR is crucial to the copper elbow, because a non-defective group of products do not go for another check. That means a copper elbow with defects will be sent out to the customer if it is mixed in this group.
Otherwise, YOT-Net takes more time to detect an image, because YOT-Net not only gives the probabilities but also the coordinates.
3.3.3. Comparisons with Deep Learning Detection Methods
Experiments were conducted to compare the proposed model with Faster R-CNN [
23], SSD [
25], and YOLOv3 [
37], as shown in
Table 3. Faster R-CNN and SSD were implemented with the mmdetection toolbox [
41].
YOT-Net got the highest mAP among those methods involved in comparison. With regard to other indicators, YOT-Net also behaves satisfactory. Although FNR of YOT-Net is a little higher than that of Faster R-CNN, YOT-Net saves about 42.65% time. Fast inference is helpful for elbow defect detection online.
3.3.4. Proportion of Each Kind of Defect
In the TJ-CE-DET dataset, defects are specified to be three types, e.g., extrusion, crack, and pitted-surface.
Under YOT-Net, the proportion of each kind of defect to the total detects is easily known, as shown in
Table 4. This number if helpful for checking the reason causing the defects.
3.4. Ablate Study
3.4.1. The Convergence Speed of YOLOv3 and YOT-Net
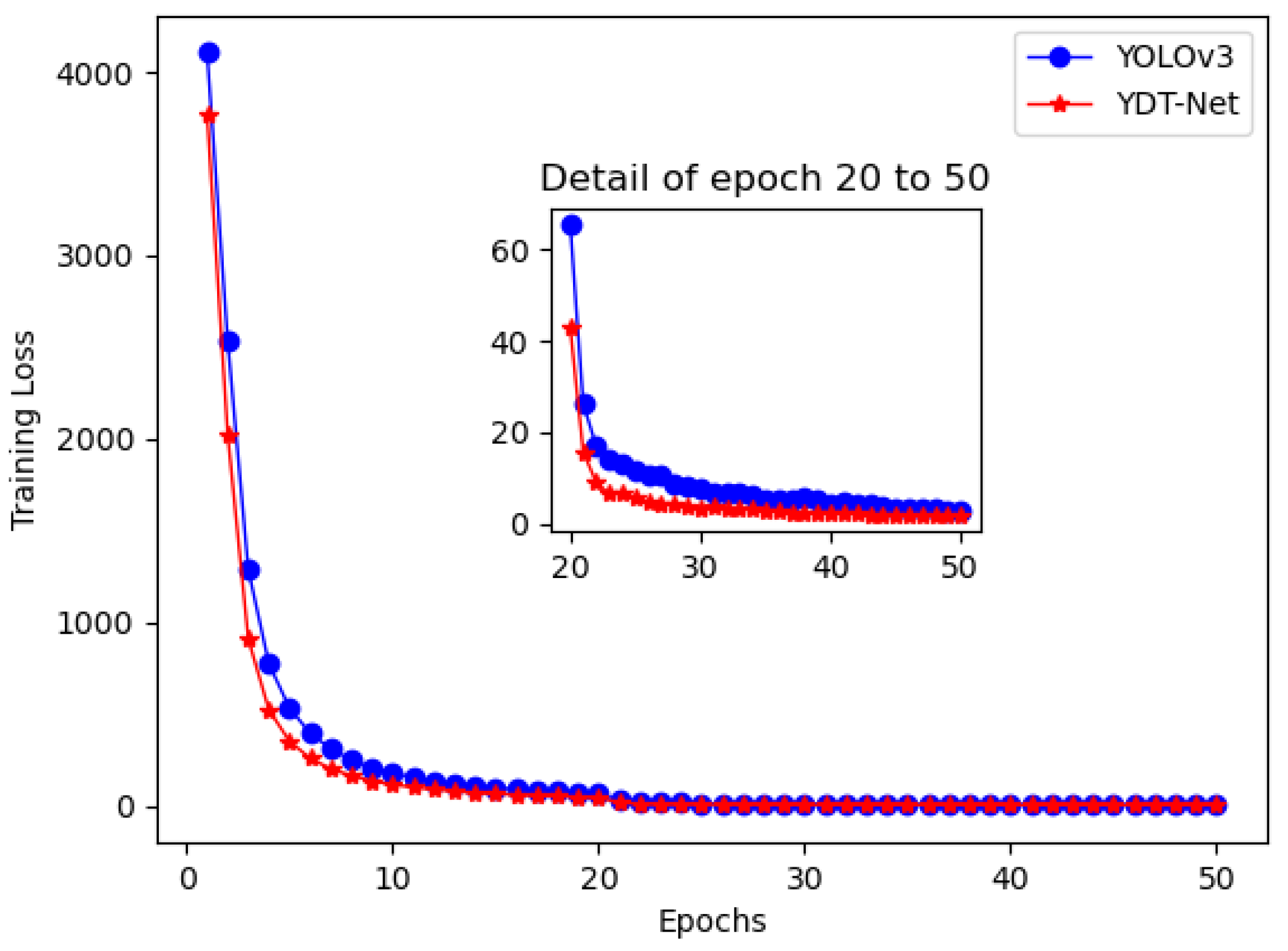
An experiment with 50 epochs, 0.00001 learning rate, and 0.9995 decay rate was carried out to study the convergence speed of YOLOv3 and YOT-Net.
As shown in
Figure 7, YOT-Net converges more quickly than the original YOLOv3. The reason is that the triplet loss help the YOT-Net learn similarity and dissimilarity of triplet data within an epoch. This accelerates the convergence progress.
3.4.2. The Margin of Triplet Loss
In order to get a small triplet loss, the distance between the base and the positive sample is minimized; meanwhile, the distance between the base and negative sample is maximized. The hyper parameter
m is a key factor to the loss function [
35]. In this paper, a series of experiments were conducted to find an appreciate value, and the experiment results show that 0.2 is a good choice, as shown in
Figure 8.
3.4.3. The Hyper Parameter in LCCT Loss Module
As shown in Equation (
3),
is a regular term to enhance feature extract ability. It’s also key to set the hyper parameter
in Equation (
3). A series of experiments were set up to get a well-performed value. As shown in
Figure 8, 0.05 is a satisfactory value for the hyper parameter
.
4. Conclusions
The copper elbow surface defect detection is an important and challenging task. In this paper, a YOLOv3 combined triplet loss network(YOT-Net) is proposed to tackle this problem. The introduction of triplet loss greatly improves the feature extracting ability. Experiments were carried out on practical copper elbows. On distinguishing defect elbows from non-defect ones regardless of the type of defects, YOT-Net performs quite well on accuracy, precision, recall rate, and F1 score. Meanwhile, the proportion of each kind of defect to the total defect can be easily known. This is helpful for checking the reason causing different kinds of defects. In addition, YOT-Net shows faster convergence rates.
Author Contributions
Conceptualization, Y.X.; Methodology, Y.X.; Software, Y.X. and J.F.; Writing, Y.X. and Y.Y.; Data curation, G.L.; Supervision, Z.W. All authors have read and agreed to the published version of the manuscript.
Funding
This research was funded by National Key R&D Project grant number 2018YFB1702703.
Institutional Review Board Statement
Not applicable.
Informed Consent Statement
Not applicable.
Data Availability Statement
Not applicable.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Ngan, H.Y.; Pang, G.K.; Yung, S.P.; Ng, M.K. Wavelet based methods on patterned fabric defect detection. Pattern Recognit. 2005, 38, 559–576. [Google Scholar] [CrossRef]
- Deutschl, E.; Gasser, C.; Niel, A.; Werschonig, J. Defect detection on rail surfaces by a vision based system. In Proceedings of the IEEE Intelligent Vehicles Symposium, Parma, Italy, 1–2 June 2004. [Google Scholar]
- Yang, X.Z.; Pang, G.K.; Yung, N.H.C. Discriminative fabric defect detection using adaptive wavelets. Opt. Eng. 2002, 41, 3116–3126. [Google Scholar] [CrossRef]
- Luo, Q.; Fang, X.; Liu, L.; Yang, C.; Sun, Y. Automated visual defect detection for flat steel surface: A survey. IEEE Trans. Instrum. Meas. 2020, 69, 626–644. [Google Scholar] [CrossRef] [Green Version]
- Aiger, D.; Talbot, H. The phase only transform for unsupervised surface defect detection. In Emerging Topics in Computer Vision and Its Applications; World Scientific: Singapore, 2012; pp. 215–232. [Google Scholar]
- Choi, D.c.; Jeon, Y.j.; Yun, J.P.; Kim, S.W. Pinhole detection in steel slab images using Gabor filter and morphological features. Appl. Opt. 2011, 50, 5122–5129. [Google Scholar] [CrossRef] [PubMed]
- Liu, W.; Yan, Y. Automated surface defect detection for cold-rolled steel strip based on wavelet anisotropic diffusion method. Int. J. Ind. Syst. Eng. 2014, 17, 224–239. [Google Scholar] [CrossRef]
- Dong, Y.; Tao, D.; Li, X.; Ma, J.; Pu, J. Texture classification and retrieval using shearlets and linear regression. IEEE Trans. Cybern. 2014, 45, 358–369. [Google Scholar] [CrossRef]
- Goumeidane, A.B.; Khamadja, M.; Naceredine, N. Bayesian pressure snake for weld defect detection. In Proceedings of the International Conference on Advanced Concepts for Intelligent Vision Systems, Bordeaux, France, 28 September–2 October 2009; pp. 309–319. [Google Scholar]
- López, F.; Valiente, J.M.; Prats, J.M. Surface grading using soft colour-texture descriptors. In Proceedings of the Iberoamerican Congress on Pattern Recognition, Havana, Cuba, 15–18 November 2005; pp. 13–23. [Google Scholar]
- Yin, Y.; Zhang, K.; Lu, W. Textile flaw classification by wavelet reconstruction and BP neural network. In Proceedings of the International Symposium on Neural Networks, Wuhan, China, 26–29 May 2009; pp. 694–701. [Google Scholar]
- Jia, H.; Murphey, Y.L.; Shi, J.; Chang, T.S. An intelligent real-time vision system for surface defect detection. In Proceedings of the 17th International Conference on Pattern Recognition, Cambridge, UK, 26 August 2004; Volume 3, pp. 239–242. [Google Scholar]
- Pernkopf, F. Detection of surface defects on raw steel blocks using Bayesian network classifiers. Pattern Anal. Appl. 2004, 7, 333–342. [Google Scholar] [CrossRef]
- Mandriota, C.; Nitti, M.; Ancona, N.; Stella, E.; Distante, A. Filter-based feature selection for rail defect detection. Mach. Vis. Appl. 2004, 15, 179–185. [Google Scholar] [CrossRef]
- Ghorai, S.; Mukherjee, A.; Gangadaran, M.; Dutta, P.K. Automatic defect detection on hot-rolled flat steel products. IEEE Trans. Instrum. Meas. 2012, 62, 612–621. [Google Scholar] [CrossRef]
- Krizhevsky, A.; Sutskever, I.; Hinton, G.E. Imagenet classification with deep convolutional neural networks. Adv. Neural Inf. Process. Syst. 2012, 25, 1097–1105. [Google Scholar] [CrossRef]
- Simonyan, K.; Zisserman, A. Very deep convolutional networks for large-scale image recognition. arXiv 2014, arXiv:1409.1556. [Google Scholar]
- Szegedy, C.; Liu, W.; Jia, Y.; Sermanet, P.; Reed, S.; Anguelov, D.; Erhan, D.; Vanhoucke, V.; Rabinovich, A. Going deeper with convolutions. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Boston, MA, USA, 7–12 June 2015; pp. 1–9. [Google Scholar]
- He, K.; Zhang, X.; Ren, S.; Sun, J. Deep residual learning for image recognition. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Las Vegas, NV, USA, 27–30 June 2016; pp. 770–778. [Google Scholar]
- Huang, G.; Liu, Z.; Van Der Maaten, L.; Weinberger, K.Q. Densely connected convolutional networks. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Honolulu, HI, USA, 21–26 July 2017; pp. 4700–4708. [Google Scholar]
- Howard, A.G.; Zhu, M.; Chen, B.; Kalenichenko, D.; Wang, W.; Weyand, T.; Andreetto, M.; Adam, H. Mobilenets: Efficient convolutional neural networks for mobile vision applications. arXiv 2017, arXiv:1704.04861. [Google Scholar]
- Girshick, R. Fast r-cnn. In Proceedings of the IEEE International Conference on Computer Vision, Santiago, Chile, 7–13 December 2015; pp. 1440–1448. [Google Scholar]
- Ren, S.; He, K.; Girshick, R.; Sun, J. Faster R-CNN: Towards real-time object detection with region proposal networks. IEEE Trans. Pattern Anal. Mach. Intell. 2016, 39, 1137–1149. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- He, Y.; Song, K.; Meng, Q.; Yan, Y. An end-to-end steel surface defect detection approach via fusing multiple hierarchical features. IEEE Trans. Instrum. Meas. 2019, 69, 1493–1504. [Google Scholar] [CrossRef]
- Liu, W.; Anguelov, D.; Erhan, D.; Szegedy, C.; Reed, S.; Fu, C.Y.; Berg, A.C. Ssd: Single shot multibox detector. In Proceedings of the European Conference on Computer Vision, Amsterdam, The Netherlands, 11–14 October 2016; pp. 21–37. [Google Scholar]
- Redmon, J.; Divvala, S.; Girshick, R.; Farhadi, A. You only look once: Unified, real-time object detection. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Las Vegas, NV, USA, 27–30 June 2016; pp. 779–788. [Google Scholar]
- Li, Y.; Huang, H.; Xie, Q.; Yao, L.; Chen, Q. Research on a surface defect detection algorithm based on MobileNet-SSD. Appl. Sci. 2018, 8, 1678. [Google Scholar] [CrossRef] [Green Version]
- Zhang, C.; Chang, C.C.; Jamshidi, M. Concrete bridge surface damage detection using a single-stage detector. Comput.-Aided Civ. Infrastruct. Eng. 2020, 35, 389–409. [Google Scholar] [CrossRef]
- Zhang, J.; Kang, X.; Ni, H.; Ren, F. Surface defect detection of steel strips based on classification priority YOLOv3-dense network. Ironmak. Steelmak. 2020, 48, 547–558. [Google Scholar] [CrossRef]
- Ouyang, W.; Xu, B.; Hou, J.; Yuan, X. Fabric defect detection using activation layer embedded convolutional neural network. IEEE Access 2019, 7, 70130–70140. [Google Scholar] [CrossRef]
- Jian, C.; Gao, J.; Ao, Y. Automatic surface defect detection for mobile phone screen glass based on machine vision. Appl. Soft Comput. 2017, 52, 348–358. [Google Scholar] [CrossRef]
- Yang, J.; Li, S.; Wang, Z.; Yang, G. Real-time tiny part defect detection system in manufacturing using deep learning. IEEE Access 2019, 7, 89278–89291. [Google Scholar] [CrossRef]
- Wei, X.; Wei, D.; Suo, D.; Jia, L.; Li, Y. Multi-target defect identification for railway track line based on image processing and improved YOLOv3 model. IEEE Access 2020, 8, 61973–61988. [Google Scholar] [CrossRef]
- Chen, J.; Liu, Z.; Wang, H.; Nunez, A.; Han, Z. Automatic defect detection of fasteners on the catenary support device using deep convolutional neural network. IEEE Trans. Instrum. Meas. 2017, 67, 257–269. [Google Scholar] [CrossRef] [Green Version]
- Schroff, F.; Kalenichenko, D.; Philbin, J. Facenet: A unified embedding for face recognition and clustering. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Boston, MA, USA, 7–12 June 2015; pp. 815–823. [Google Scholar]
- Lin, T.Y.; Maire, M.; Belongie, S.; Hays, J.; Perona, P.; Ramanan, D.; Dollár, P.; Zitnick, C.L. Microsoft coco: Common objects in context. In Proceedings of the European Conference on Computer Vision, Zurich, Switzerland, 6–12 September 2014; pp. 740–755. [Google Scholar]
- Redmon, J.; Farhadi, A. Yolov3: An incremental improvement. arXiv 2018, arXiv:1804.02767. [Google Scholar]
- Redmon, J.; Farhadi, A. YOLO9000: Better, faster, stronger. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Honolulu, HI, USA, 21–26 July 2017; pp. 7263–7271. [Google Scholar]
- Abadi, M.; Barham, P.; Chen, J.; Chen, Z.; Davis, A.; Dean, J.; Devin, M.; Ghemawat, S.; Irving, G.; Isard, M.; et al. Tensorflow: A system for large-scale machine learning. In Proceedings of the 12th USENIX Symposium on Operating Systems Design and Implementation (OSDI 16), Savannah, GA, USA, 2–4 November 2016; pp. 265–283. [Google Scholar]
- Xie, S.; Girshick, R.; Dollár, P.; Tu, Z.; He, K. Aggregated residual transformations for deep neural networks. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Honolulu, HI, USA, 21–26 July 2017; pp. 1492–1500. [Google Scholar]
- Chen, K.; Wang, J.; Pang, J.; Cao, Y.; Xiong, Y.; Li, X.; Sun, S.; Feng, W.; Liu, Z.; Xu, J.; et al. MMDetection: Open mmlab detection toolbox and benchmark. arXiv 2019, arXiv:1906.07155. [Google Scholar]
| Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}